Спосіб калібровки анемометра і пристрій для його здійснення
Номер патенту: 69551
Опубліковано: 15.09.2004
Автори: Іващенко Андрій Павлович, Кірпатенко Микола Васильович, Ральчук Владислав Володимирович, Кудря Степан Олександрович, Кирпатенко Ілля Миколаєвич, Павловський Роман Миколаєвич, Коханєвич Володимир Петрович, Радченко Олексій Леонідович
Формула / Реферат
1. Спосіб калібровки анемометра, який включає синхронну реєстрацію значень вихідного сигналу анемометра і відносного руху повітря і статора датчика швидкості вітру анемометра у нерухомому повітрі, розрахунок проміжних значень калібровки методом апроксимації виміряних значень, вимір відносної швидкості руху повітря і статора датчика швидкості вітру анемометра за допомогою спідометра відносно нерухомої поверхні, який відрізняється тим, що в ньому статор датчика швидкості вітру анемометра приводять у рух по черзі по декількох колах з різними радіусами, а статор чашкового датчика на кожному колі приводять у рух у прямому і зворотному напрямках віссю обертання своїх чашок перпендикулярно колу обертання статора, причому проміжні вихідні дані статора чашкового датчика швидкості вітру анемометра отримуються як середнє арифметичне від даних, отриманих при русі статора чашкового датчика у протилежних напрямках, а остаточні коефіцієнти ![]() у формулі:
у формулі:
![]()
лінійної апроксимації відповідності відносної швидкості руху статора датчика швидкості вітру анемометра і повітря ![]() вихідному сигналу анемометра
вихідному сигналу анемометра ![]() розраховують для випадку з двома колами обертання по формулах:
розраховують для випадку з двома колами обертання по формулах:
![]()
де:
![]() - коефіцієнти формули апроксимації, які визначені при русі статора датчика швидкості вітру анемометра на більшому радіусі, a
- коефіцієнти формули апроксимації, які визначені при русі статора датчика швидкості вітру анемометра на більшому радіусі, a ![]() - на меншому, радіус якого зменшений у 2 рази.
- на меншому, радіус якого зменшений у 2 рази.
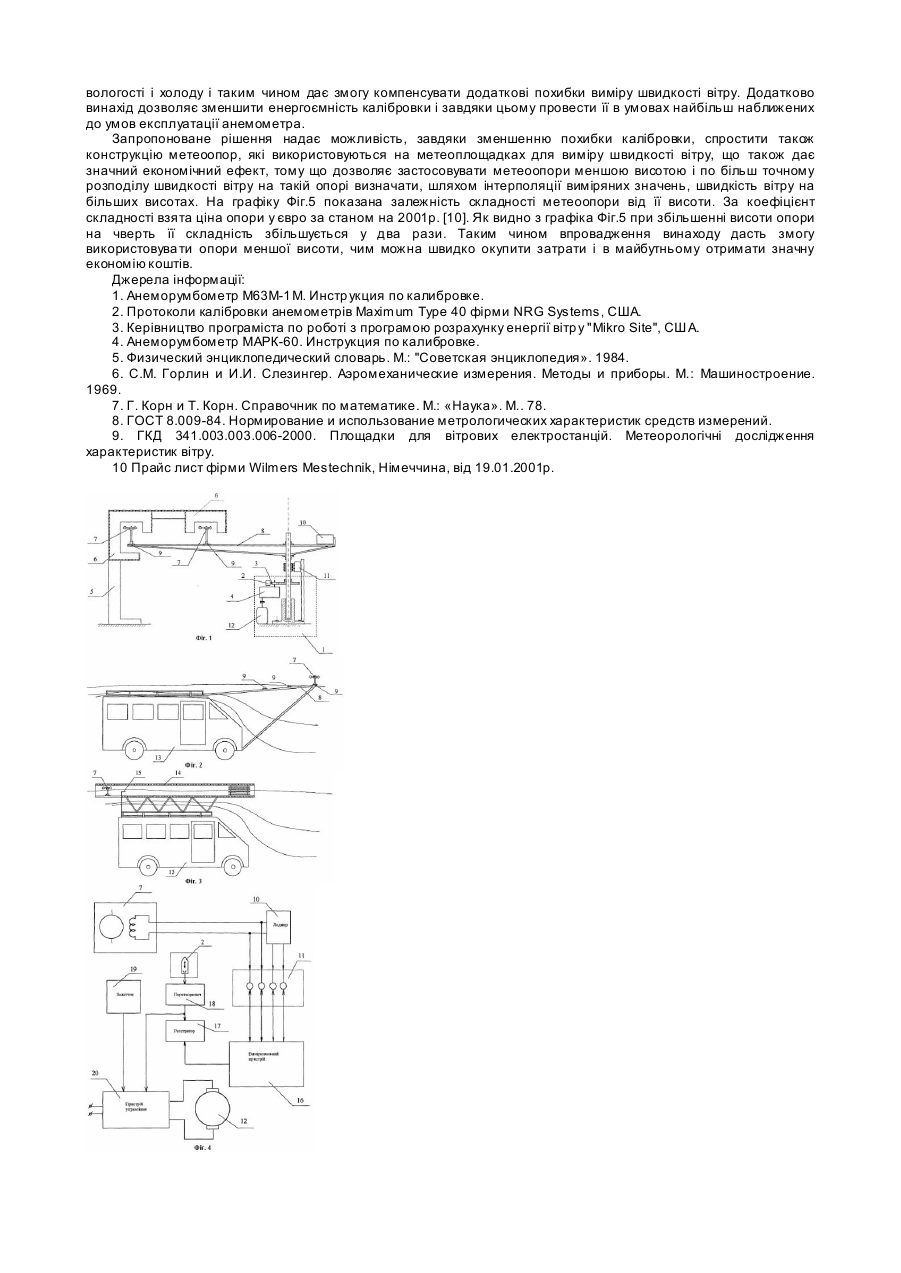
2. Пристрій для калібровки анемометра, який містить пристрій приведення у відносний рух повітря і статора датчика швидкості вітру анемометра на основі транспортного засобу, який має спідометр, виносний кронштейн, на дальньому від транспортного засобу кінці якого установлений пристрій кріплення датчика швидкості вітру анемометра, а транспортний засіб має регулятор відносної швидкості руху повітря і пристрою кріплення датчика швидкості вітру анемометра, який відрізняється тим, що на виносному кронштейні між транспортним засобом і першим пристроєм кріплення датчика встановлено додатково ще декілька пристроїв кріплення датчиків швидкості вітру анемометра на такій відстані від першого, при якій різниця рівней впливу транспортним засобом на датчики швидкості вітру у різних місцях їх установки більша, ніж похибка виміру швидкості повітряного потоку анемометром, що калібрується.
3. Пристрій за п. 2, який відрізняється тим, що на транспортному засобі, наприклад автомобілі, пристрій для кріплення статора датчика швидкості вітру встановлено у трубі з демпфером турбулентної складової потоку повітря та вимірювачем відносної швидкості руху повітря і статора датчика швидкості вітру анемометра.
4. Пристрій за п. 2, який відрізняється тим, що на транспортному засобі у вигляді ротативної машини, на її роторній частині, встановлено пристрій кріплення реєстратора (лоджера) анемометра, що калібрується.
5. Пристрій за п. 4, який відрізняється тим, що на транспортному засобі у вигляді ротативної машини введено пристрій передачі даних у вигляді, наприклад, контактних кілець і щіток, вимірювальний прилад, наприклад, вимірювач частоти, причому перший вхід пристрою передачі даних підключено до виходу датчика швидкості вітру анемометра, а другий вхід - до виходу синхронізуючого сигналу реєстратора (лоджера) анемометра, а виходи пристрою передачі даних підключені до відповідних входів вимірювального приладу, перетворювач, вхід якого підключено до виходу датчика швидкості руху (спідометра), пристрій реєстрації, перший вхід якого підключено до виходу вимірювального пристрою, а другий - до виходу перетворювача, задатчик режиму роботи ротативної машини та пристрій керування, який має у своєму складі стабілізатор напруги електромережі, причому вихід пристрою керування підключено до електродвигуна ротативної машини, перший вхід - до виходу перетворювача, а другий вхід - до виходу задатчика режиму роботи ротативної машини.
6. Пристрій за п. 4, який відрізняється тим, що у пристрої на основі ротативної машини вздовж траєкторії руху додаткових пристроїв для кріплення датчика швидкості вітру анемометра встановлені демпфери турбулентної складової повітря у вигляді відкритих камер, які своєю відкритою стороною встановлені до траєкторії руху датчиків.
Текст
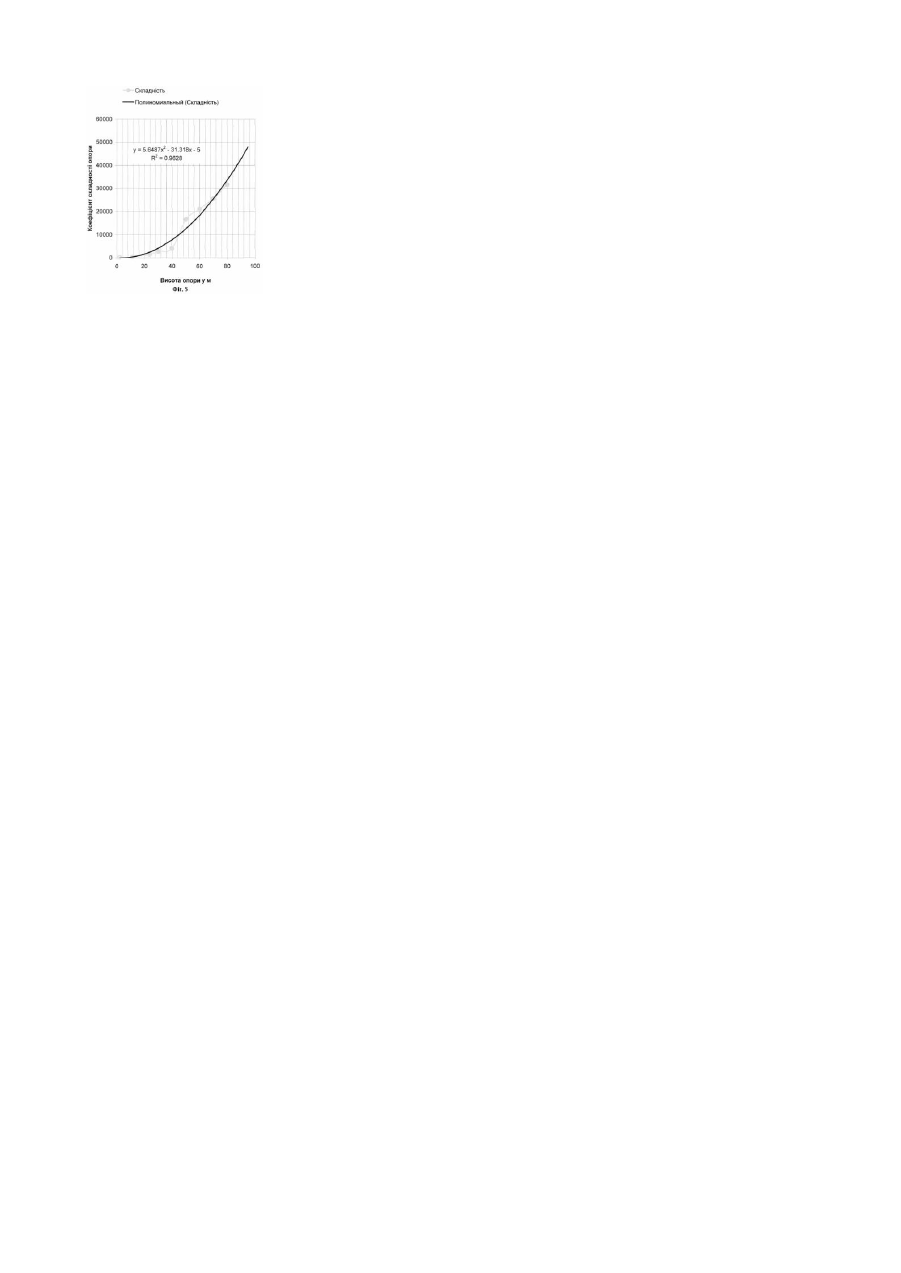
Спосіб калібровки (повірки) анемометра і пристрій для його здійснення відноситься до вимірювальної техніки, а саме до способів і пристроїв для калібровки приладів виміру швидкості вітр у. Спосіб і пристрій можуть бути використані для метрологічної атестації (первинної калібровки) і подальших калібровок приладів виміру швидкості вітр у. Відомий спосіб [1], який призначений для калібровки пропелерних анемометрів. Калібровка анемометрів по цьому способу проводиться шляхом виміру моменту сили тертя спокою ротора датчика швидкості вітру анемометра і перевірки геометричних розмірів та експертизі чистоти поверхні лопатей його пропелерів. Якщо значення виміряного моменту сили тертя спокою не перевищує встановленої норми, розміри у заданих межах не змінилися, а поверхні лопатей пропелеру чисті, то такий анемометр вважається придатним для виміру швидкості вітру у метеорологічних цілях. Момент сили тертя покою підшипників датчика швидкості вітру анемометра визначається як добуток сили, після дії якої ротор датчика починає рухатися, на радіус rrot ротора. Такий спосіб калібровки пропелерних анемометрів вважається придатним по тій причині, що при невеликому значенні тертя покою ротора, швидкість вітру можна обчислити по конструктивним розмірам пропелерного датчика швидкості вітру анемометра. Так наприклад, якщо проігнорувати значеннями в'язкості повітря і тертя у підшипниках датчика швидкості вітру анемометра, то при середньому куті атаки пропелерів датчика a s=45° швидкість руху точок пропелера, які обертаються по середньому радіусу rs площини обмаху пропелерів, буде приблизно дорівнювати швидкості потоку повітря. Недоліком цього способу є велике значення похибки виміру пропелерним анемометром швидкості вітру для потреб вітроенергетики тому, що неможливо достатньо точно врахувати дію в'язкості повітря і сили тертя у підшипниках датчика швидкості вітру анемометра шляхом розрахунку. Враховуючи те, що енергія вітру пропорційна кубу його швидкості, то відносна похибка визначення енергії вітру в такому разі збільшується ще у три рази. Великі значення похибок калібровки не дають можливості достатньо точно робити експертну оцінку перспективності будівництва вітроелектростанцій (ВЕС) на експериментальній метеоплощадці, проводити експериментальне дослідження розподілу градієнта швидкості вітру по напрямкам та достатньо точно визначати характеристику кривої потужності вітроенергетичної установки (ВЕУ). При калібровці у такий спосіб існує небезпека пропуску бракованих анемометрів, у яких брак є причиною наявності резонансів. Такий брак можна виявити тільки при роботі датчика швидкості руху анемометра у повітряному потоці. Крім того, у такий спосіб можна калібрувати тільки пропелерні анемометри. Інші анемометри, наприклад чашкові, калібрують у штучному (наприклад у аеродинамічній трубі [2]) або натуральному (наприклад, природньому вітр у на метеопосту [3]) повітряному потоці, при чому швидкість повітряного потоку визначають по еталонному пропелерному анемометру. Але в такому разі до похибки калібровки еталонного пропелерного анемометра ще додається складова, яка обумовлена анізотропністю повітря по швидкості руху, тобто неоднаковістю швидкості руху повітря по модулю і напрямку у всіх точках повітряного потоку. Крім того, у еталонному пропелерному анемометрі, для зменшення похибки калібровки, повинен бути значний радіус обмаху лопатів (так, наприклад, у [2] він дорівнює 30см), в наслідок чого такий еталонний датчик швидкості вітру додатково збурює повітряний потік в аеродинамічній трубі. Найбільш близьким до способу, що пропонується, є спосіб поданий у [4]. В цьому способі калібровку анемометра в різних диапазонах швидкості вітру проводять двома методами. В диапазонi швидкостей від 2м/с і більше калібровку проводять методом прямого випробування, тобто у відповідності до реальних умов експлуатації анемометра у вітроенергетиці, коли анемометр на метеопосту встановлюється нерухомо, а повітря рухається (вітер). Калібровку анемометра при цьому проводять шляхом виміру температури, тиску та вологості атмосферного повітря, синхронної реєстрації значень вихідного сигналу анемометра і відносного руху повітря і датчика швидкості вітру анемометра та розрахунку проміжних значень калібровки методом апроксимації виміряних значень, при чому вимір і реєстрацію значень вихідного сигналу анемометра і швидкості відносного руху повітря і датчика швидкості вітру проводять у змінному повітряному потоці при нерухомому статорі датчика швидкості вітру при чому вимір швидкості змінного повітряного потоку проводять опосередкованим методом шляхом виміру різниці повного і статичного тисків повітряного потоку і послідуючим розрахунком питомої швидкості по рівнянню Бернуллі. Приймач повного тиску і датчик швидкості вітру анемометра встановлюються в різних місцях повітряного потоку, які можуть значно відрізнятися своїми параметрами і це повинно враховуватися поправочним коефіцієнтом xå приймача повного тиску у рівнянні Бернуллі (див. [5] -"трубки измерительные"). Поправочний коефіцієнт xå визначають за допомогою еталонного датчика швидкості руху повітря, наприклад такого, який приведен у аналогу. Виміряні значення швидкості вітру перераховують, за допомогою рівняння Клапейрона [5] до таких значень, які відповідають стандартним кліматичним умовам. Парні значення проміжних точок відповідності вихідного сигналу анемометра швидкості потоку повітря визначають шляхом апроксимації виміряних пар значень по методу найменших квадратів. Остаточно апроксимована характеристика калібровки анемометра відображається у загальному вигляді по формулі (1): i i-1 (1) u = ai y + ai-1y + ... + a1y + b де u - швидкість вітру; y- значення вихідного сигналу анемометра; аі та b - постійні коефіцієнти. Для швидкостей повітряного потоку менше 2м/с, з метою визначення швидкості початку обертання лопатей анемометра, випробування анемометра проводять зворотнім методом, тобто у нерухомому повітрі, при чому статор анемометра приводять у рух, повільно збільшуючи його швидкість. Початок обертання лопатей анемометра фіксують візуально після чого припиняють збільшення швидкості руху статора анемометра і проводять вимір швидкості руху анемометра. Недоліком цього способу є значний рівень випадкової складової похибки виміру швидкості вітру при калібровці анемометра в діапазоні швидкостей від 2м/с і більше, яка обумовлена рівнем анізотропності рухомого повітря по швидкості руху. Завдяки цьому розрахунок похибки калібровки ускладнюється і його потрібно робити в рамках теорії багатовимірного розподілу ймовірності [7] так, наприклад, як це зроблено у [2]. Крім того, при такому способі визначення коефіцієнту b у формулі (1) для швидкостей повітря від 2м/с і більше з достатньою похибкою є проблематичним, оскільки похибка визначення коефіцієнту b по формулі апроксимації значно перевищує похибку визначення коефіцієнту а (див. [2]). Додатковим недоліком є ще і те, що визначення швидкості повітряного потоку проводиться по відношенню до декількох еталонів, таких як еталони температури, тиску, та інш. Проблематичним є також можливість виміру в лабораторних умовах додаткових похибок калібровки анемометрів в залежності від температури і вологості тому, що рухоме повітря з малим рівнем анізотропності по швидкості руху складно застабілізувати по температурі і вологості без значних затрат електроенергії. Значних витрат електроенергії вимагає цей спосіб і при перевірці анемометрів у повному складі на інтервалах усереднення 10 або 60хв. Таким чином, такий спосіб не дає можливості надійно і достовірно визначати абсолютне значення швидкості вітру, з такою похибкою, яка необхідна для задач вітроенергетики, що не дозволяє робити з необхідною похибкою розрахунок абсолютного значення енергії вітрового потоку в районі можливого будівництва ВЕС, робити вимір характеристики кривої потужності ВЕУ з мінімальним рівнем систематичної похибки та вимагає застосовування метеоопор на повну висоту, яка повинна дорівнювати середній висоті розташування лопатей ВЕУ, для виміру вітропотенціалу площадки майбутньої ВЕС. Задачею винаходу є створення такого способу, при якому калібровка анемометра проводиться значною мірою у ізотропному по швидкості руху потоку повітря, що значно зменшить похибку калібровки, дозволить спростити її розрахунок і робити його в рамках теорії одномірного розподілу імовірностей, тобто по [8], збільшить надійність та забезпечить достовірність розрахунку похибки і як наслідок, дасть змогу спростити конструкції пристрою для калібровки анемометрів і метеоопор для виміру вітропотенціалу площадок майбутніх ВЕС. Спрощення конструкції пристрою для калібровки анемометра дозволить робити калібровку анемометра у повному складі і забезпечить можливість визначення додаткових похибок анемометра шляхом його калібровки у стандартних камерах тепла, холоду та вологості у всьому температурному діапазоні експлуатації. Поставлена задача вирішується тим, що в способі калібровки анемометра, який включає синхронну реєстрацію значень вихідного сигналу анемометра і відносного руху повітря і статора датчика швидкості вітру анемометра у нерухомому повітрі, розрахунок проміжних значень калібровки методом апроксимації виміряних значень, вимір відносної швидкісті руху повітря і статора датчика швидкості вітру анемометра за допомогою спідометра відносно нерухомої поверхні, статор датчика швидкості вітру анемометра приводять у рух по черзі по декільках колах з різними радіусами, а статор чашкового датчика на кожному колі приводять у рух у прямому і зворотньому напрямках віссю обертання своїх чашок перпендикулярно колу обертання статора, при чому проміжні вихідні дані статора чашкового датчика швидкості вітру анемометра отримуються як середнє арифметичне від даних, отриманих при русі статора чашкового датчика у протилежних напрямках, а остаточні коефіцієнти аі і b у формулі: u = a1y + b (2) лінійної апроксимації відповідності відносної швидкості руху статора датчика швидкості вітру анемометра і повітря u вихідному сигналу анемометра y, розраховуються для випадка з двома колами обертання по формулах: 2 (3) a1 = (a11 ) / a12 b = 2b 1 - b 2 (4) де а11 і b1 - коефіцієнти формули апроксимації, які визначені при русі статора датчика швидкості вітру анемометра на більшому радіусі, а а12 і b2 - на меншому, радіус якого зменшений у 2 рази. Порівняльний аналіз з відомими технічними рішеннями показав, що технічне рішення, яке пропонується, відрізняється наявністю нових елементів, якими є: проведення калібровки анемометра шляхом обертання статора датчика швидкості вітру по декількох замкнутим колам з різними радіусами, а для чашкового анемометра ще й проведення калібровки в прямому і зворотньому напрямкам по кожному колу, що дає змогу витримати достатньо повну динамічну подібність (див. [6]) калібровки анемометра реальним умовам його експлуатації і робити калібровку анемометра у повному обсязі в ізотропному по швидкості вітру повітрі і цим значно зменшити похибку його калібровки, спростити її розрахунок, тобто робити його по [8], та збільшити надійність та забезпечити достовірність калібровки тому, що вимір абсолютних швидкостей руху статора датчика швидкості вітру анемометра можна контролювати меншою кількістю і більш простішими і точними еталонами, такими як еталони довжини і часу та контролювати процес калібровки декількома способами, за допомогою таких приладів як диференційний і інтегральний спідометри, що виключає можливість "промаху" при калібровці. Крім того, проведення калібровки анемометра у повному обсязі шляхом обертання статора його датчика швидкості вітру по колу дозволяє значно зменшити енергозатрати на калібровку і проводити її за інтервали осереднення, які використовуються в умовах експлуатації анемометра та дає можливість проводити калібровку анемомера у стандартних камерах тепла, холоду і вологи для визначення додаткових похибок. На основі наведеного вище можна зробити висновок, що сукупність суттєви х ознак, що викладені у формулі винаходу є необхідною і достатньою для досягнення нового технічного результату - витримання повної динамічної подібності умов калібровки анемометрів у ізотропному по швидкості потоку повітря умовам експлуатації анемометрів і таким чином зменшити похибки калібровки, підвищити її надійність, достовірність, зменшити енергоємність та спростити розрахунок похибок. Принцип роботи пристрою полягає у наступному Для зменшення часу калібровки, встановлення значень швидкості руху статора робиться ступенями рівномірно розташованими в заданому диапазонi швидкості вітру. Виміряні парні значення швидкості вітру і вихідні значення анемометра або датчика швидкості вітру використовуються для визначення усіх парних значень шляхом апроксимації їх методом найменших квадратів [7]. На практиці рівномірний поступовий рух статора анемометра у нерухомому повітрі здійснити не завжди зручно по тій причині, що для цього необхідне дуже складне і не завжди доступне обладнання, наприклад, частина тунелю метрополітену чи рівна ділянка автомагістралі у безвітряну погоду і т.д. Більш практично використовувати для калібровки рух ста тора датчика швидкості вітру анемометра по колу. За таким способом можна проводити калібровку анемометра при інтервалах осереднення 10 або 60хв, що відповідає умовам експлуатації анемометра, а вплив центробіжної сили можна врахувати шляхом апроксимації вихідних значень сигналу анемометра при однакових швидкостях його р уху, але при різних центробіжних силах. Змінювати значення центробіжної сили, зберігаючи швидкість руху датчика швидкості вітру постійною, можна, рухаючи статор датчика швидкості вітр у анемометра по колам з різними діаметрами. Центробіжна сила fc буде в такому разі змінюватися по формулі: 2 (5) fc = mu / r де m - маса ротору датчика швидкості вітру анемометра; r - радіус кола, по якому рухається статор датчика швидкості вітру анемометра. Як видно з формули (5) сила fс пропорційна квадрату швидкості руху статора датчика швидкості вітру анемометра, і ця сила складається з силою опору ротора датчика швидкості руху анемометра повітрю fv по правилу складання векторів, тому потрібно обмежувати допустимий рівень швидкості руху статора по колу для кожного конкретного типу датчика швидкості вітру. Так, наприклад, для датчика швидкості вітру NRG #40 анемометра NRG Lgger 9200 виробництва США допустима максимальна швидкість вітру umax=96м/с, при якій він витримує опір повітря силою fv=fmax. Сила fmax може бути розрахована по формулі (6): 2 (6) fmax = 0,5 crsu max де с - аеродинамічний коефіцієнт опору; r - щільність повітря, яка при сухому повітрі і стандартних кліматичних умовах дорівнює r=1,205кг/м 3; s - характерна площа рухомої частини датчика швидкості вітру анемометра. Так, наприклад, якщо при с=1 прийняти s=150см 2 то fmax~70кгм/с2. Для того, щоб при калібровці анемометру не вивести його з ладу, потрібно прийняти допустиму центробіжну силу f v=fd
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for calibrating anemometer and a device for the realization of the method
Автори англійськоюKudria Stepan Oleksandrovych, Radchenko Oleksii Leonidovych, Kyrpatenko Illia Mykolaievych, Kokhanevych Volodymyr Petrovych, Kyrpatenko Mykola Vasyliovych
Назва патенту російськоюСпособ калибровки анемометра и устройство для осуществления способа
Автори російськоюКудря Степан Александрович, Радченко Алексей Леонидович, Кирпатенко Илья Николаевич, Коханевич Владимир Петрович, Кирпатенко Николай Васильевич
МПК / Мітки
МПК: G01P 21/00
Мітки: анемометра, пристрій, калібровки, спосіб, здійснення
Код посилання
<a href="https://ua.patents.su/8-69551-sposib-kalibrovki-anemometra-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб калібровки анемометра і пристрій для його здійснення</a>
Спосіб формування або калібровки пакувального контейнера та формуючий пристрій для його здійснення
Номер патенту: 52626
Опубліковано: 15.01.2003
Автор: Палм Ларс-Ерік
МПК: B65B 61/00
Мітки: пристрій, спосіб, здійснення, формування, контейнера, калібровки, формуючий, пакувального
Формула / Реферат:
1. Спосіб формування або калібровки пакувального контейнера (1), що герметично закривається, виконаного з гнучкого пакувального матеріалу (5) і вміщуючого податливий нестисливий вміст, у якому застосовують формуючий пристрій (11), яким оточують пакувальний контейнер (1), при цьому формуючий пристрій пристосовують до бажаної остаточної конфігурації пакувального контейнера, причому формуючі частини (12, 13) формуючого пристрою переміщують...
Спосіб калібровки кінців тонкостінних труб і пристрій для його втілення
Номер патенту: 9460
Опубліковано: 30.09.1996
Автори: Житній Григорій Дмитрович, Младінов Степан Дмитрович, Новицький Валерій Андронович, Сухов Віталій Вікторович, Венцківський Олександр Вітальович, Мільченко Євген Іванович
МПК: B21D 41/00, B21C 37/06
Мітки: втілення, кінців, калібровки, спосіб, пристрій, тонкостінних, труб
Формула / Реферат:
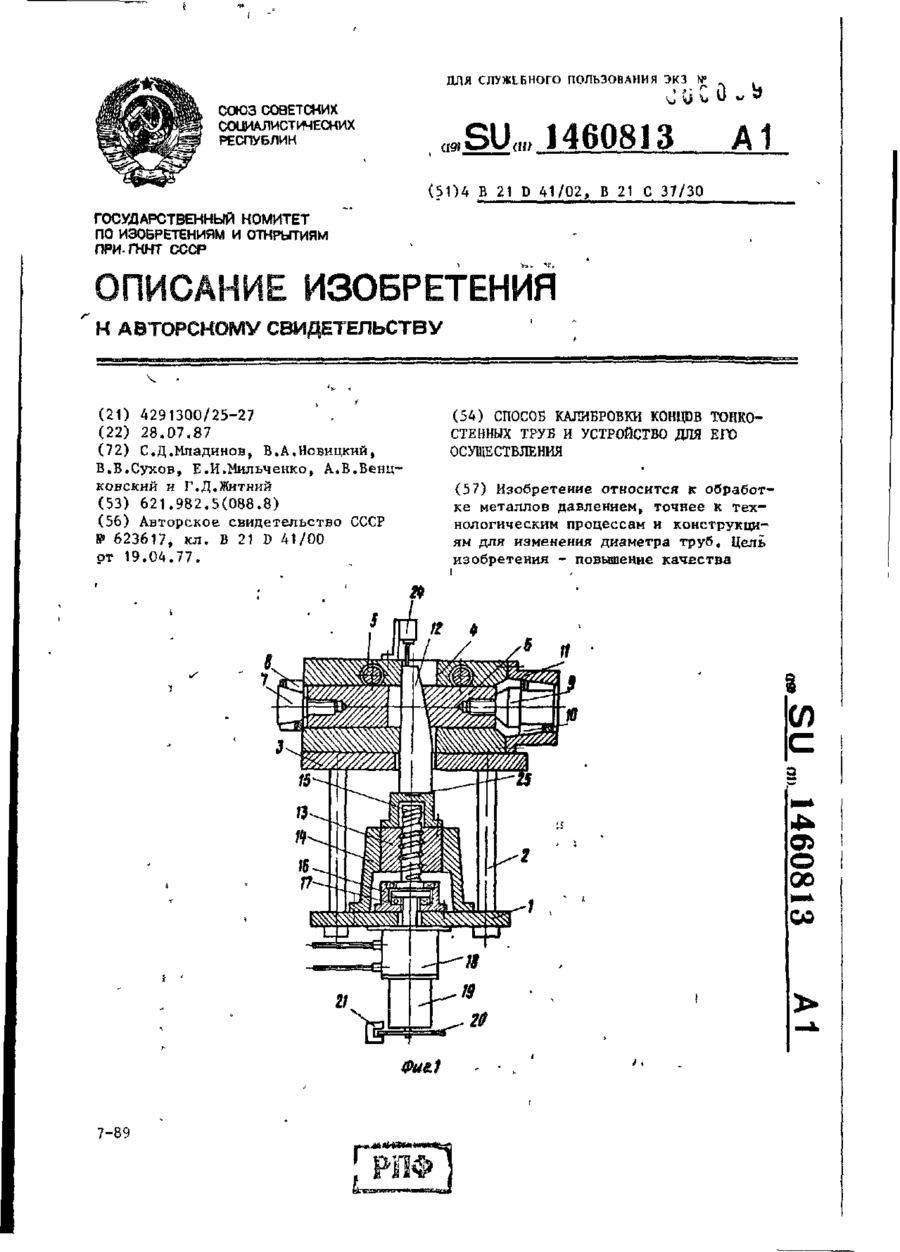
1. Способ калибровки концов тонкостенных труб путем их расширения или обжатия, отличающийся тем, что, с целью повышения качества труб, деформацию расширения или обжатия производят в два этапа: первоначально до диаметра трубы D1, определяемого соотношениемгде Dном - заданный диаметр конца трубы,sт - предел текучести материала трубы,Е - модуль упругости материала трубы,e - относительное удлинение материала...
Спосіб управління гідротранспортною установкою та пристрій для його здійснення
Номер патенту: 30476
Опубліковано: 15.11.2000
Автори: Виноградов Борис Володимирович, Свєткіна Олена Юрьївна
МПК: F04B 49/02
Мітки: гідротранспортною, здійснення, спосіб, пристрій, управління, установкою
Формула / Реферат:
1. Спосіб управління гідротранспортною установкою, що включає подачу гідросуміші до нагнітального трубопроводу установки, який відрізняється тим, що попередньо задають величину швидкості гідросуміші у нагнітальному трубопроводі, вимірюють її поточне значення, порівнюють із заданим, і, у випадку відхилення в сторону зменшення, подають стиснене повітря до нагнітального трубопроводу до моменту досягнення швидкості гідросуміші заданої...
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Бачок Олег Сергійович, Козак Олег Володимирович, Драпак Георгій Мефодіович
МПК: B60H 3/00
Мітки: кондиціонування, транспортних, пристрій, засобів, повітря
Формула / Реферат:
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Спосіб відсмоктування газів від промислових ванн і пристрій для його здійснення
Номер патенту: 63994
Опубліковано: 16.02.2004
Автори: Барахтенко Євген Генадійович, Барахтенко Генадій Михайлович
МПК: F24F 7/06, F24F 13/00, F24F 7/00
Мітки: спосіб, газів, ванн, здійснення, промислових, пристрій, відсмоктування
Формула / Реферат:
1. Спосіб відсмоктування газів від промислової ванни, що містить кільцевий відсмоктувач, який відрізняється тим, що утворюють штучний вихровий рух газового потоку з утворенням по осі обертання зони негативного тиску, який формує спадний потік у напрямку до поверхні промислової ванни шляхом відсмоктування газів периферійними тангенціальними струменями.2. Спосіб за п. 1, який відрізняється тим, що відсмоктування газового (аерозольного)...
Попередній патент: Пристрій для запуску спалених газорозрядних ламп
Наступний патент: Спосіб активації бетонних сумішей в обертовому електромагнітному полі
Випадковий патент: Вузол кріплення гнучкого шнека до вала