Підп’ятник на постійних магнітах
Номер патенту: 77947
Опубліковано: 11.03.2013
Автори: Тарасов Віктор Олексійович, Гриценко Володимир Ілліч, Зіненко Володимир Миколайович
Формула / Реферат
1. Підп'ятник на постійних магнітах, що містить магнітний силовий підвіс, датчик положення вала, пристрій автоматичного управління осьовим положенням вала, який відрізняється тим, що магнітний силовий підвіс містить по чотири силових магнітних відштовхувачі в кожному лівому та правому підп'ятниках, п'яту, яка установлена між правим та лівим підп'ятниками і складається з диска, екранів і установленого між екранами магніту п'яти, причому диск установлений на валу підп'ятника, силові магнітні відштовхувачі в лівому та правому підп'ятниках установлені рівномірно по колу, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран, п'єзоелектричний двигун, установлений в ізолятор, над п'єзоелектричним двигуном установлений регулювальний гвинт, причому силові магнітні відштовхувачі і п'ята з магнітом п'яти утворюють силовий магнітний підвіс, в правому підп'ятнику у втулці з зазором відносно торця вала в ізоляторі установлений датчик осьового положення вала, пристрій автоматичного управління осьовим положенням вала включає задатчик, вимірювач величини зазору, диференційний підсилювач сигналу неузгодження, перший і другий підсилювач, причому датчик осьового положення вала електрично зв'язаний з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому датчик осьового положення вала з'єднаний з входом вимірювача величини зазору, а його вихід з'єднаний з першим входом диференційного сигналу неузгодження, вихід задатчика з'єднаний з другим входом диференційного підсилювача сигналу неузгодження, перший вихід диференційного підсилювача сигналу неузгодження з'єднаний з входом першого підсилювача, а його вихід з'єднаний з п'єзоелектричними двигунами силових магнітних підштовхувачів правого підп'ятника, другий вихід диференційного підсилювача сигналу неузгодження з'єднаний з входом другого підсилювача, а його вихід з'єднаний з п'єзоелектричними двигунами силових магнітних підштовхувачів лівого підп'ятника.
2. Підп'ятник на постійних магнітах за п. 1, який відрізняється тим, що в кожному лівому та правому підп'ятниках встановлено n>4 підштовхувачів.
Текст
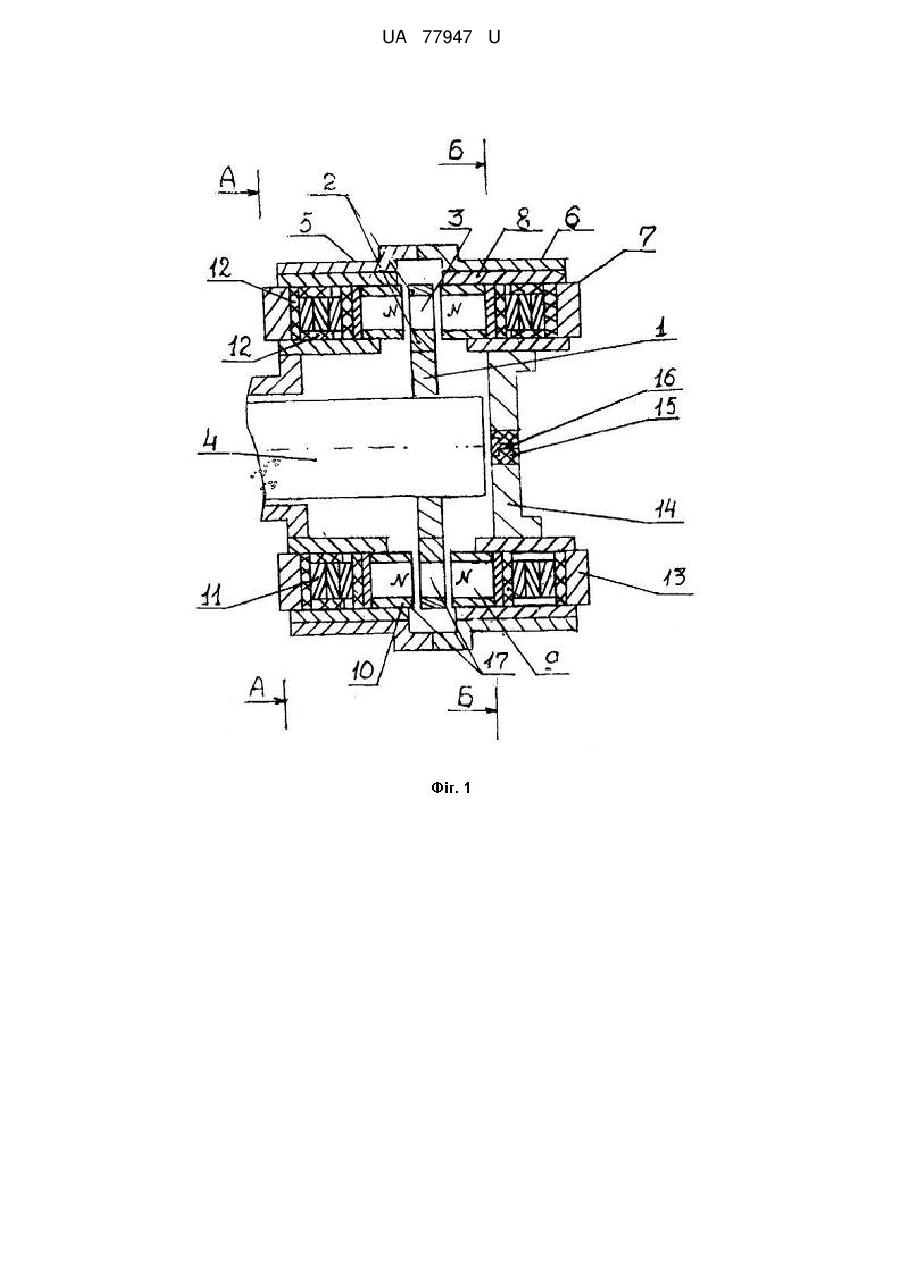
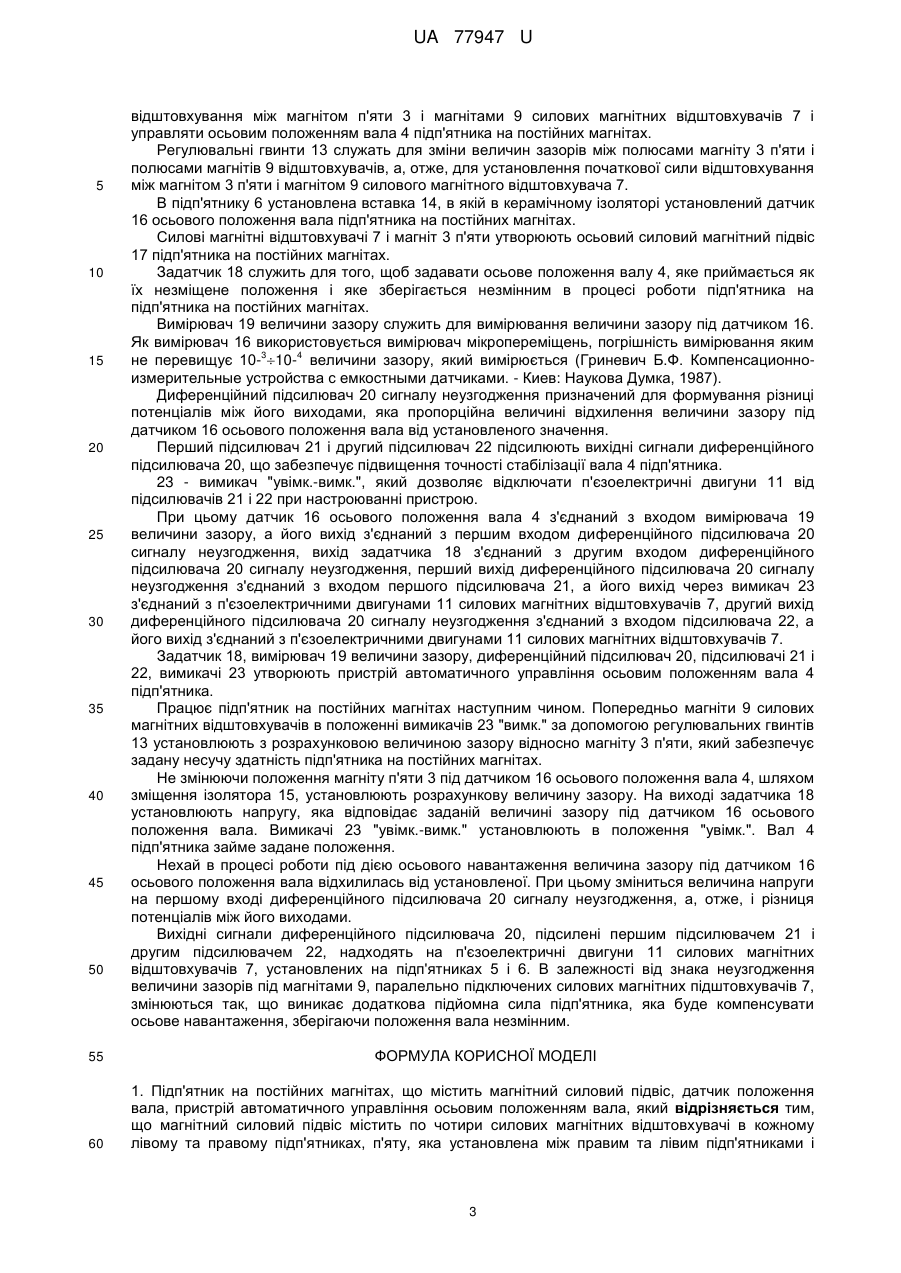
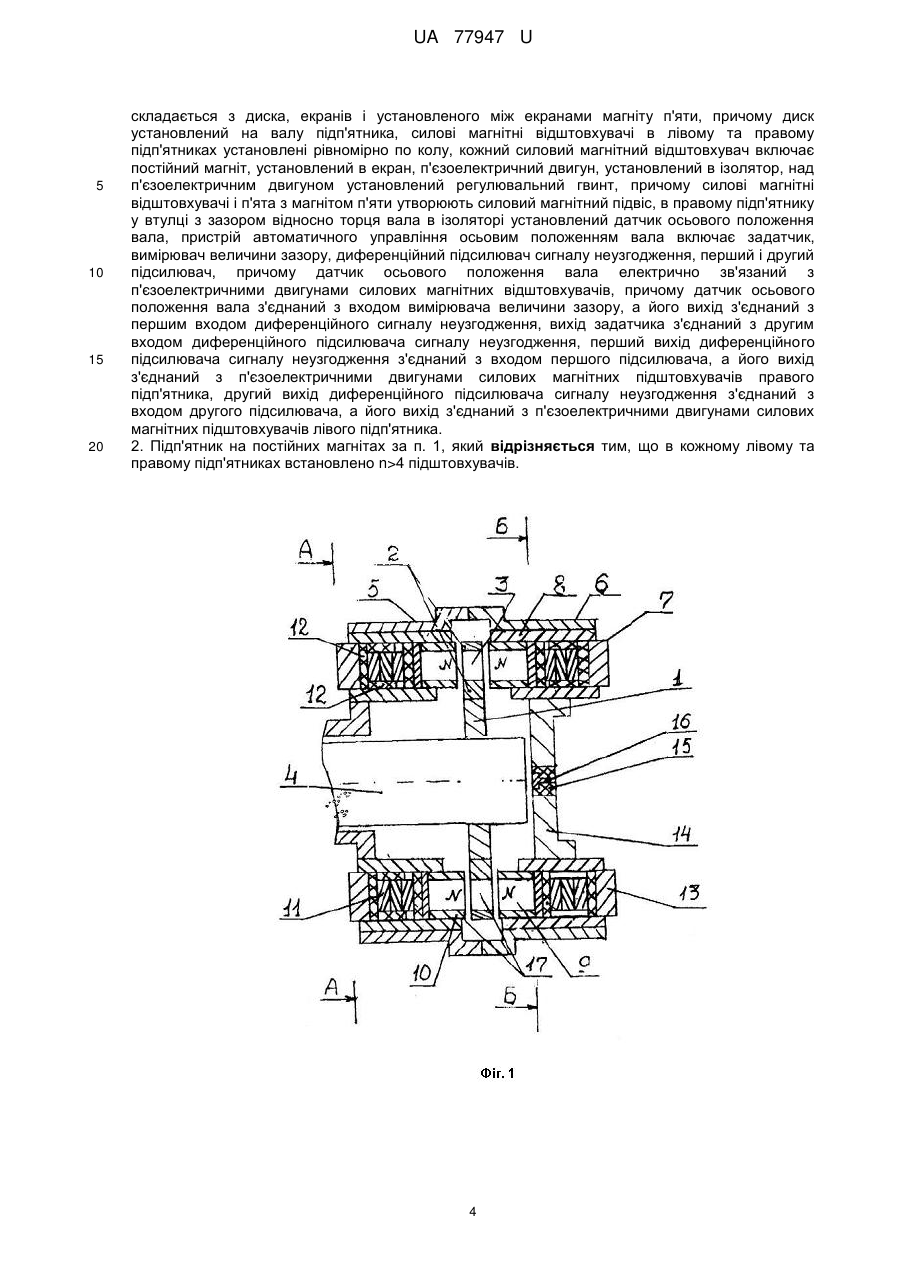
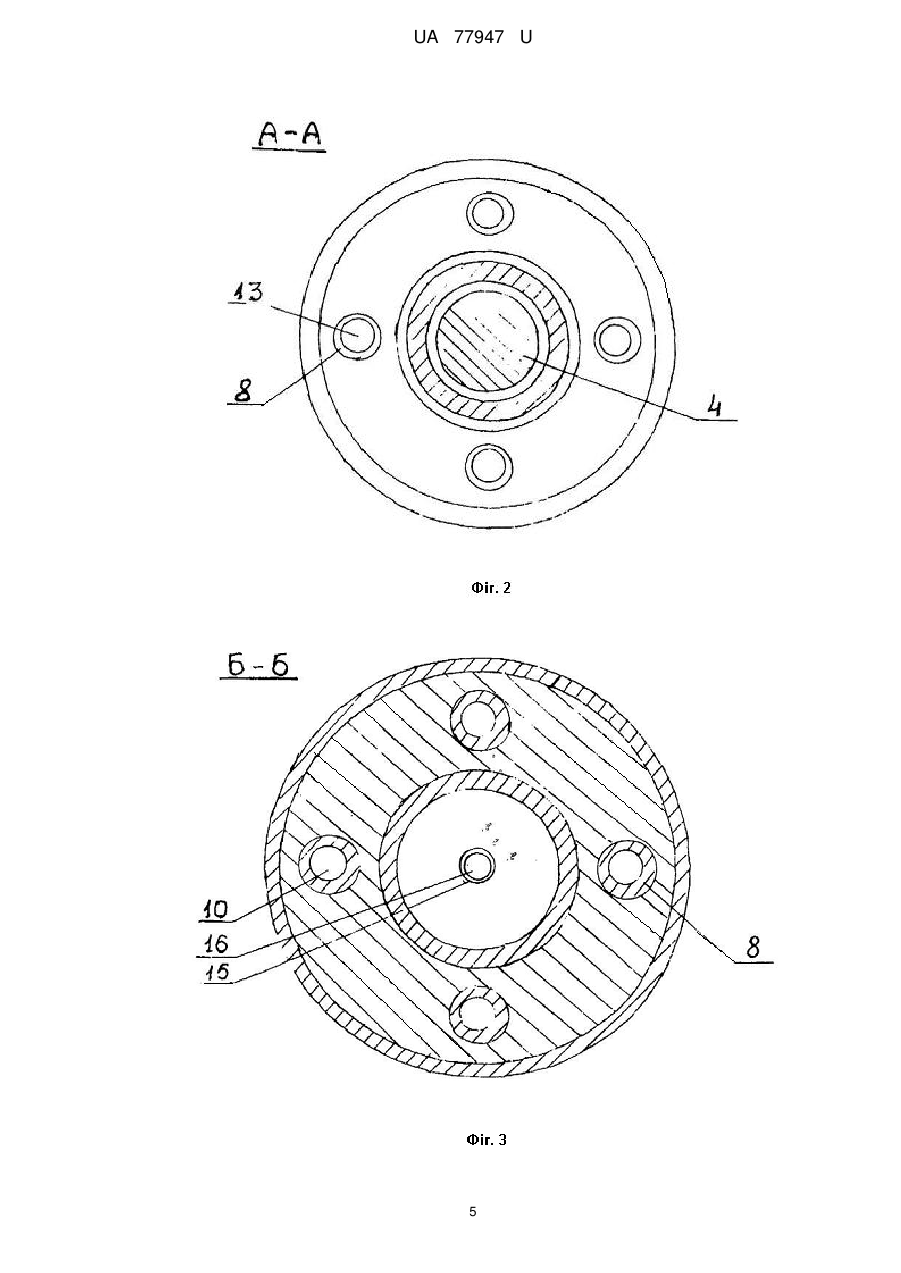
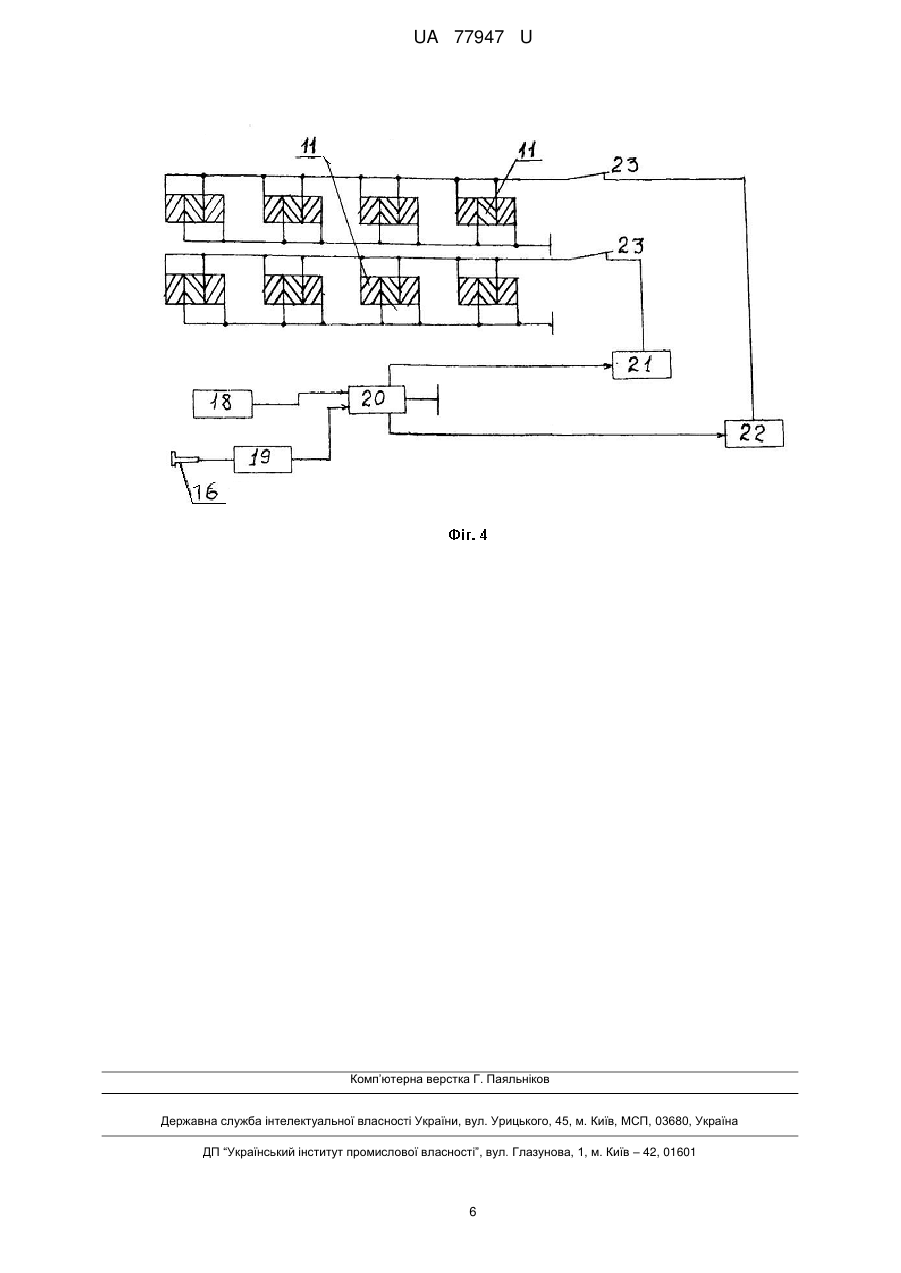
Реферат: Підп'ятник на постійних магнітах містить датчик положення вала, пристрій автоматичного управління осьовим положенням вала, що містить задатчик, вимірювач величини зазору, диференційний підсилювач сигналу неузгодження, перший і другий підсилювач, магнітний силовий підвіс, що містить по чотири силових магнітних відштовхувачі в кожному лівому та правому підп'ятниках, п'яту, яка установлена між правим та лівим підп'ятниками і складається з диска, екранів і установленого між екранами магніту п'яти. UA 77947 U (12) UA 77947 U UA 77947 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до верстатобудування і, зокрема, до систем автоматичного управління і стабілізації положення формоутворюючих елементів верстатів надвисокої точності, і може використовуватися для побудови прецизійних шпиндельних опор на постійних магнітах. З а.с. СРСР № 1 530 855 від 22.08.1989 р. відомий аеростатичний підп'ятник. Цей аеростатичний підп'ятник вибраний як найближчий аналог. Аеростатичний підп'ятник найближчого аналога містить двосторонній аеростатичний підп'ятник і автономні компенсатори осьового зміщення вала, які встановлені по обидві сторони двостороннього аеростатичного підп'ятника. Компенсатори осьового зміщення вала аеростатичного підп'ятника оснащені регуляторами тиску газу в робочих зазорах компенсаторів. Кожний регулятор тиску газу містить п'єзоелектричний двигун і встановлену на ньому регулювальну голку, яка служить для зміни площі прохідного перерізу жиклерів подачі газу в робочий зазор компенсатора осьового зміщення вала, і, відповідно, для регулювання тиску газу у робочому зазорі. Для запобігання осьовому зміщенню вала аеростатичний підп'ятник містить пристрій автоматичного керування положенням вала аеростатичного підп'ятника, який містить задатчик осьового положення вала, пристрій порівняння і підсилювач. Аеростатичні опори складні у виготовленні, так як товщина гасового мастильного шару, а, відповідно, і робочого зазору в цих опорах складає 10-30 мкм. Для їх роботи потрібен енергоємний компресорний прилад. Волога, яка випадає з газу (повітря), що надходить на піддув цих опор, викликає корозію, а обмежувачі подачі газу (жиклери) потребують періодичного очищення. З урахуванням вищесказаного підп'ятник на постійних магнітів вигідно відрізняється від аеростатичного підп'ятника. Задача, що вирішується, полягає у такому удосконаленні аеростатичного підп'ятника, яке полягає в заміні несучого газового мастильного шару аеростатичного підп'ятника несучим магнітним полем постійних магнітів з можливістю управління осьовим положенням вала підп'ятника на постійних магнітах, причому двосторонній аеростатичний підп'ятник і компенсатори осьового зміщення вала аеростатичного підп'ятника замінюються осьовим магнітним підвісом, також зменшується енергоємність підп'ятника найближчого аналога. Це досягається тим, що магнітний силовий підвіс, датчик положення вала, пристрій автоматичного управління осьовим положенням вала, згідно з корисною моделлю, магнітний силовий підвіс містить по чотири силових магнітних відштовхувачі в кожному підп'ятнику, п'яту, яка установлена між підп'ятниками і складається з диска, екранів і установленого між екранами магніту п'яти, причому диск установлений на валу підп'ятника, силові магнітні відштовхувачі в підп'ятниках установлені рівномірно по колу, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран, п'єзоелектричний двигун, установлений в ізолятор, над п'єзоелектричним двигуном установлений регулювальний гвинт, причому силові магнітні відштовхувачі і п'ята з магнітом п'яти утворюють силовий магнітний підвіс, в правому підп'ятнику у втулці з зазором відносно торця вала в ізоляторі установлений датчик осьового положення вала, пристрій автоматичного управління осьовим положенням вала включає задатчик, вимірювач величини зазору, диференційний підсилювач сигналу неузгодження, перший і другий підсилювач, причому датчик осьового положення вала електрично зв'язаний з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому датчик осьового положення вала з'єднаний з входом вимірювача величини зазору, а його вихід з'єднаний з першим входом диференційного сигналу неузгодження, вихід задатчика з'єднаний з другим входом диференційного підсилювача сигналу неузгодження, перший вихід диференційного підсилювача сигналу неузгодження з'єднаний з входом першого підсилювача, а його вихід з'єднаний з п'єзоелектричнимидвигунами силових магнітних підштовхувачів правого підп'ятника, другий вихід диференційного підсилювача сигналу неузгодження з'єднаний з входом другого підсилювача, а його вихід з'єднаний з п'єзоелектричними двигунами силових магнітних підштовхувачів лівого підп'ятника. Задача вирішується також тим, що в кожному підп'ятнику підп'ятника на постійних магнітах встановлюють n>4 підштовхувачів. Причинно-наслідковий зв'язок технічного рішення, що заявляється, з досягуваним технічним результатом полягає у наступному. На Фіг. 1 представлений підп'ятник на постійних магнітах, який включає п'яту, яка установлена на валу 4 підп'ятника на постійних магнітах. П'ята включає диск 1, екрани 2 і установлений між ними магніт 3 п'яти, причому диск 1 установлений на валу 4 підп'ятника. У полюсів магніту п'яти в підп'ятниках 5 і 6 установлені силові магнітні відштовхувачі 7. Їх постійні магніти 9 переміщуються п'єзоелектричними двигунами 11 і своїми полюсами звернені до 1 UA 77947 U однойменних полюсів магніту п'яти. Однойменні полюси магнітів відштовхуються. Сила відштовхування FB1 між магнітом силового магнітного відштовхувача і магнітом п'яти розраховується по формулі [Пятин Ю.М. Постоянные магниты. - М.: Энергия, 1980]: 2 2 BrBSMB BrПМSПM , (1) 2 2 0 1 2lз / QMBlMB 0 1 2lз / QПMlПM де: - BrB - магнітна індукція магніту відштовхувача; l з - величина зазору між магнітом 9 F1 B 5 відштовхувача і магнітом 3 п'яти; lMB - довжина магніту відштовхувача; QMB - магнітна жорсткість магніту відштовхувача; SMB - площа полюса магніту відштовхувача, 0 - магнітна постійна, B rПМ - магнітна індукція магніту п'яти; lП М - довжина магніту п'яти; Q ПМ - магнітна жорсткість магніту п'яти; SПМ - площа полюса магніту п'яти. 10 FMB залежить від величини зазору lз між п'ятою - магнітом і магнітом відштовхувача. B rПМ - індукція п'яти - магніту; QПМ - магнітна жорсткість п'яти - магніту; lП М - товщина п'яти магніту; SПМ - площа кола на п'яті - магніті, діаметр якого дорівнює діаметру магніту відштовхувача. Сила відштовхування 15 20 25 30 35 40 45 50 FB1 залежить від величини зазору lз між магнітом вала і магнітом відштовхувача. Сила відштовхування FBn між п'ятою і відштовхувачами, встановленими в одному підп'ятнику, дорівнює n силовими магнітними FBn FB1n . (2) Коли різниця сил відштовхування правого і лівого підп'ятників дорівнює нулю і відсутнє осьове навантаження, вал займає незміщене положення. Нехай осьове навантаження спрямоване в сторону правого підп'ятника. Величини зазорів між магнітом п'яти і магнітами підштовхувачів зміняться, а, отже, зміняться сили відштовхування. В момент часу, коли різниця сил відштовхування між магнітом п'яти і силовими магнітними відштовхувачами правого підп'ятника 6 і між магнітом п'яти і силовими магнітними відштовхувачами лівого підп'ятника 5 стане рівною осьовому навантаженню, вал займе нове, зміщене відносно початкового, положення. Для запобігання осьовому зміщенню вала підп'ятника на постійних магнітах, він оснащений пристроєм автоматичного управління осьовим положенням вала. Цей пристрій шляхом зміни величин зазорів між магнітом п'яти і магнітами 9 силових магнітних підштовхувачів п'єзоелектричними двигунами 11 цих підштовхувачів постійно компенсує осьове навантаження на вал і запобігає його зміщенню. Різниця сил відштовхування між магнітом п'яти і силовими магнітними відштовхувачами підп'ятників 7 визначається магнітною індукцією магніту п'яти, магнітною індукцією магнітів силових магнітних відштовхувачів, їх розмірами, величинами. Корисна модель пояснюється кресленнями: Фіг. 1 - Підп'ятник на постійних магнітах. Фіг. 2 - теж, але в перерізі по А-А Фіг. 1. Фіг. 3 - теж, але в перерізі по Б-Б Фіг. 1. Фіг. 4 - Функціональна схема пристрою автоматичного управління осьовим положенням вала підп'ятника на постійних магнітах. Підп'ятник на постійних магнітах (Фіг. 1) містить п'яту, яка включає диск 1, екрани 2 і установлений між ними магніт 3 п'яти, причому диск 1 установлений на валу 4 підп'ятника. У полюсів магніту п'яти в підп'ятниках 5 і 6 установлені силові магнітні відштовхувачі 7. В підп'ятниках 5 і 6, розташованих по обидві сторони п'яти 1, 2, 3, в втулках 8 рівномірно по колу співвісно один навпроти одного установлені по чотири силових магнітних відштовхувача 7 (Фіг. 1, 2, 3). Кожний силовий магнітний відштовхувач включає постійний магніт 9, установлений для концентрації його магнітного потоку в зазорі між магнітом 9 і магнітом 3 п'яти у екран 10, який виконаний з магнітном'якого матеріалу, наприклад пермюндера з r>60000 (r - відносна магнітна проникність) (Пятин Ю.М., Постоянные магниты, справочник. - М.: Энергия, 1980). При цьому постійні магніти 9 відштовхувачів своїми полюсами звернені до однойменних полюсів магніту п'яти 3. П'єзоелектричні двигуни 11 силових магнітних відштовхувачів 7 установлені в ізолятори 12 над постійними магнітами 9 відштовхувачів і служать для переміщення постійних магнітів 9 силових магнітних відштовхувачів 7, тобто для зміни величин зазорів між полюсами магніту 3 п'яти і полюсами постійних магнітів 9. Це забезпечує можливість змінювати силу 2 UA 77947 U 5 10 15 20 25 30 35 40 45 50 55 60 відштовхування між магнітом п'яти 3 і магнітами 9 силових магнітних відштовхувачів 7 і управляти осьовим положенням вала 4 підп'ятника на постійних магнітах. Регулювальні гвинти 13 служать для зміни величин зазорів між полюсами магніту 3 п'яти і полюсами магнітів 9 відштовхувачів, а, отже, для установлення початкової сили відштовхування між магнітом 3 п'яти і магнітом 9 силового магнітного відштовхувача 7. В підп'ятнику 6 установлена вставка 14, в якій в керамічному ізоляторі установлений датчик 16 осьового положення вала підп'ятника на постійних магнітах. Силові магнітні відштовхувачі 7 і магніт 3 п'яти утворюють осьовий силовий магнітний підвіс 17 підп'ятника на постійних магнітах. Задатчик 18 служить для того, щоб задавати осьове положення валу 4, яке приймається як їх незміщене положення і яке зберігається незмінним в процесі роботи підп'ятника на підп'ятника на постійних магнітах. Вимірювач 19 величини зазору служить для вимірювання величини зазору під датчиком 16. Як вимірювач 16 використовується вимірювач мікропереміщень, погрішність вимірювання яким 3 4 не перевищує 10- 10- величини зазору, який вимірюється (Гриневич Б.Ф. Компенсационноизмерительные устройства с емкостными датчиками. - Киев: Наукова Думка, 1987). Диференційний підсилювач 20 сигналу неузгодження призначений для формування різниці потенціалів між його виходами, яка пропорційна величині відхилення величини зазору під датчиком 16 осьового положення вала від установленого значення. Перший підсилювач 21 і другий підсилювач 22 підсилюють вихідні сигнали диференційного підсилювача 20, що забезпечує підвищення точності стабілізації вала 4 підп'ятника. 23 - вимикач "увімк.-вимк.", який дозволяє відключати п'єзоелектричні двигуни 11 від підсилювачів 21 і 22 при настроюванні пристрою. При цьому датчик 16 осьового положення вала 4 з'єднаний з входом вимірювача 19 величини зазору, а його вихід з'єднаний з першим входом диференційного підсилювача 20 сигналу неузгодження, вихід задатчика 18 з'єднаний з другим входом диференційного підсилювача 20 сигналу неузгодження, перший вихід диференційного підсилювача 20 сигналу неузгодження з'єднаний з входом першого підсилювача 21, а його вихід через вимикач 23 з'єднаний з п'єзоелектричними двигунами 11 силових магнітних відштовхувачів 7, другий вихід диференційного підсилювача 20 сигналу неузгодження з'єднаний з входом підсилювача 22, а його вихід з'єднаний з п'єзоелектричними двигунами 11 силових магнітних відштовхувачів 7. Задатчик 18, вимірювач 19 величини зазору, диференційний підсилювач 20, підсилювачі 21 і 22, вимикачі 23 утворюють пристрій автоматичного управління осьовим положенням вала 4 підп'ятника. Працює підп'ятник на постійних магнітах наступним чином. Попередньо магніти 9 силових магнітних відштовхувачів в положенні вимикачів 23 "вимк." за допомогою регулювальних гвинтів 13 установлюють з розрахунковою величиною зазору відносно магніту 3 п'яти, який забезпечує задану несучу здатність підп'ятника на постійних магнітах. Не змінюючи положення магніту п'яти 3 під датчиком 16 осьового положення вала 4, шляхом зміщення ізолятора 15, установлюють розрахункову величину зазору. На виході задатчика 18 установлюють напругу, яка відповідає заданій величині зазору під датчиком 16 осьового положення вала. Вимикачі 23 "увімк.-вимк." установлюють в положення "увімк.". Вал 4 підп'ятника займе задане положення. Нехай в процесі роботи під дією осьового навантаження величина зазору під датчиком 16 осьового положення вала відхилилась від установленої. При цьому зміниться величина напруги на першому вході диференційного підсилювача 20 сигналу неузгодження, а, отже, і різниця потенціалів між його виходами. Вихідні сигнали диференційного підсилювача 20, підсилені першим підсилювачем 21 і другим підсилювачем 22, надходять на п'єзоелектричні двигуни 11 силових магнітних відштовхувачів 7, установлених на підп'ятниках 5 і 6. В залежності від знака неузгодження величини зазорів під магнітами 9, паралельно підключених силових магнітних підштовхувачів 7, змінюються так, що виникає додаткова підйомна сила підп'ятника, яка буде компенсувати осьове навантаження, зберігаючи положення вала незмінним. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Підп'ятник на постійних магнітах, що містить магнітний силовий підвіс, датчик положення вала, пристрій автоматичного управління осьовим положенням вала, який відрізняється тим, що магнітний силовий підвіс містить по чотири силових магнітних відштовхувачі в кожному лівому та правому підп'ятниках, п'яту, яка установлена між правим та лівим підп'ятниками і 3 UA 77947 U 5 10 15 20 складається з диска, екранів і установленого між екранами магніту п'яти, причому диск установлений на валу підп'ятника, силові магнітні відштовхувачі в лівому та правому підп'ятниках установлені рівномірно по колу, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран, п'єзоелектричний двигун, установлений в ізолятор, над п'єзоелектричним двигуном установлений регулювальний гвинт, причому силові магнітні відштовхувачі і п'ята з магнітом п'яти утворюють силовий магнітний підвіс, в правому підп'ятнику у втулці з зазором відносно торця вала в ізоляторі установлений датчик осьового положення вала, пристрій автоматичного управління осьовим положенням вала включає задатчик, вимірювач величини зазору, диференційний підсилювач сигналу неузгодження, перший і другий підсилювач, причому датчик осьового положення вала електрично зв'язаний з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому датчик осьового положення вала з'єднаний з входом вимірювача величини зазору, а його вихід з'єднаний з першим входом диференційного сигналу неузгодження, вихід задатчика з'єднаний з другим входом диференційного підсилювача сигналу неузгодження, перший вихід диференційного підсилювача сигналу неузгодження з'єднаний з входом першого підсилювача, а його вихід з'єднаний з п'єзоелектричними двигунами силових магнітних підштовхувачів правого підп'ятника, другий вихід диференційного підсилювача сигналу неузгодження з'єднаний з входом другого підсилювача, а його вихід з'єднаний з п'єзоелектричними двигунами силових магнітних підштовхувачів лівого підп'ятника. 2. Підп'ятник на постійних магнітах за п. 1, який відрізняється тим, що в кожному лівому та правому підп'ятниках встановлено n>4 підштовхувачів. 4 UA 77947 U 5 UA 77947 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюBearing on permanent magnets
Автори англійськоюHrytsenko Volodymyr Illich, Tarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюПодпятник на постоянных магнитах
Автори російськоюГриценко Владимир Ильич, Тарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06, F16C 32/04
Мітки: підп'ятник, магнітах, постійних
Код посилання
<a href="https://ua.patents.su/8-77947-pidpyatnik-na-postijjnikh-magnitakh.html" target="_blank" rel="follow" title="База патентів України">Підп’ятник на постійних магнітах</a>
Шпиндельна опора на постійних магнітах
Номер патенту: 72699
Опубліковано: 27.08.2012
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Гриценко Володимир Ілліч
МПК: F16C 32/06
Мітки: опора, постійних, шпиндельна, магнітах
Формула / Реферат:
1. Шпиндельна опора на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, яка відрізняється тим, що вал шпиндельної опори виконаний складеним і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистого циліндра з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Суміщена шпиндельна опора на постійних магнітах
Номер патенту: 72698
Опубліковано: 27.08.2012
Автори: Зіненко Володимир Миколайович, Гриценко Володимир Ілліч, Тарасов Віктор Олексійович
МПК: F16C 32/06
Мітки: суміщена, опора, шпиндельна, магнітах, постійних
Формула / Реферат:
Суміщена шпиндельна опора на постійних магнітах, яка включає силові магнітні підвіси, датчики величин зазорів, балансуючі вантажі, опори кочення, блок вибору незміщеного положення і балансування вала суміщеної шпиндельної опори на постійних магнітах, яка відрізняється тим, що вал суміщеної шпиндельної опори на постійних магнітах виконаний складеним з трьох співвісно установлених валів одного діаметра, на середньому валу по його краях в...
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72700
Опубліковано: 27.08.2012
Автори: Гриценко Володимир Ілліч, Зіненко Володимир Миколайович, Тарасов Віктор Олексійович
МПК: F16C 32/06
Мітки: балансування, вала, шпиндельної, постійних, магнітах, опори, пристрій, радіальної
Формула / Реферат:
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах, який включає датчики величин зазорів, вимірювачі величин зазорів, обчислювач, який відрізняється тим, що включає складений вал шпиндельної опори, який складається з трьох співвісно встановлених валів, на кінцях середнього вала в екранах встановлені постійні магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72701
Опубліковано: 27.08.2012
Автори: Гриценко Володимир Ілліч, Тарасов Віктор Олексійович, Зіненко Володимир Миколайович
МПК: B23B 19/00, F16C 32/06
Мітки: радіальної, постійних, положення, обертання, магнітах, радіального, шпиндельної, стабілізації, спосіб, вала, осі, опори
Формула / Реферат:
Спосіб стабілізації радіального положення осі обертання вала радіальної шпиндельної опори на постійних магнітах, який включає вимірювання величин зазорів між валом радіальної шпиндельної опори на постійних магнітах і основами датчиків величин зазорів, визначення незміщеного положення осі обертання вала шпиндельної опори на постійних магнітах, формування масивів опорних величин зазорів, вироблення сигналів неузгодження на силові магнітні...
Пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах
Номер патенту: 77946
Опубліковано: 11.03.2013
Автори: Гриценко Володимир Ілліч, Тарасов Віктор Олексійович, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: напрямної, пристрій, постійних, положення, магнітах, вузла, рухомого, стабілізації, лінійної
Формула / Реферат:
Пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах, що включає основу лінійної напрямної, рухомий вузол лінійної напрямної, блок стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах, який відрізняється тим, що на верхній і нижній стінках рухомого вузла попарно один проти одного по вертикальних осях симетрії установлені по чотири силових магнітних відштовхувачі, кожний силовий...
Попередній патент: Пристрій стабілізації положення рухомого вузла лінійної напрямної на постійних магнітах
Наступний патент: Спосіб фізичної реабілітації підлітків і молоді з першим ступенем сколіозу
Випадковий патент: Пробійник для приєднання до поперечини штампа, зборка штампа та спосіб виготовлення штампа