Привід на основі синхронізованих гідроциліндрів (варіанти), реактивне сопло турбореактивного двигуна (варіанти) та турбореактивний двигун
Номер патенту: 81742
Опубліковано: 11.02.2008
Автори: Ляві Ален, Кеттлер Даніель, Мішо Маріон, БРОКАРД Жан-Марі
Формула / Реферат
1. Привід на основі синхронізованих гідроциліндрів, який відрізняється тим, що містить гідравлічну керуючу систему (50), ведучий гідроциліндр (10), що має циліндр (100) і поршень (102), що визначає в циліндрі дві порожнини, зв'язані з гідравлічною системою, щонайменше один ведений гідроциліндр (20), що має циліндр (200) і поршень (202), що визначає в циліндрі дві порожнини, із яких щонайменше перша порожнина зв'язана з виходом розподільника (260), зв'язаного з гідравлічною системою (50) і з керуючим органом (264), положення якого визначає тиск у першій порожнині веденого гідроциліндра, і механічний передаточний пристрій (40) для передачі переміщення поршня (102) ведучого гідроциліндра (10) на керуючий орган (264) розподільника (260), зв'язаного з веденим гідроциліндром (20) з можливістю переміщення поршня (202) веденого гідроциліндра (20), містить пристрій (130) перетворення поступального руху поршня (102) ведучого гідроциліндра (10) в обертальний рух ведучої шестірні (150), пристрій (400) передачі обертального руху ведучої шестірні (150) на ведену шестірню (250) і пристрій перетворення обертального руху веденої шестірні в поступальний рух золотника (264) розподільника, зв'язаного з одним або з кожним веденим гідроциліндром.
2. Привід за п. 1, який відрізняється тим, що пристрій перетворення обертального руху веденої шестірні (250) у поступальний рух золотника (264) утворений першою передачею гвинт-гайка, у якій гвинт жорстко зв'язаний із золотником.
3. Привід за п. 2, який відрізняється тим, що містить другу передачу гвинт-гайка для перетворення поступального руху поршня (202) веденого гідроциліндра (20), діючого як гайка, в обертальний рух гвинта (236) другої передачі гвинт-гайка, причому золотник (264) і гвинт (236) другої передачі гвинт-гайка, згвинчені один з одним з можливістю обертання золотника (264) і гвинта (236), утворюють зворотний зв’язок і золотник не переміщується поступально, коли переміщення поршня ведучого гідроциліндра, передане на золотник, і переміщення поршня веденого гідроциліндра синхронізовані.
4. Привід за будь-яким із пп. 1-3, який відрізняється тим, що один або кожен ведений гідроциліндр (20) містить першу порожнину (214), сполучену з розподільником (260), що відноситься до цього веденого гідроциліндра, і другу порожнину (212), гідравлічно сполучену з порожниною (112) ведучого гідроциліндра.
5. Привід за будь-яким із пп. 1-3, який відрізняється тим, що розподільник, який відноситься до одного або до кожного веденого гідроциліндра, є двоходовим розподільником, зв'язаним із двома порожнинами веденого гідроциліндра.
6. Привід за будь-яким із пп. 1-5, який відрізняється тим, що пристрій передачі обертального руху ведучої шестірні (150) на ведену шестірню (250) виконаний як гнучка лінійна передача (400) на опорах котіння, що несе зубчасті рейки, з якими зчіплюються шестірні.
7. Привід за будь-яким із пп. 1-6, який відрізняється тим, що містить один ведучий гідроциліндр (10) і два ведених гідроциліндри (20) і всі поршні гідроциліндрів зв'язані з керуючим кільцем (60).
8. Привід за п. 7, який відрізняється тим, що містить додатковий супровідний гідроциліндр (30), що живиться гідравлічною системою (50) паралельно ведучому гідроциліндру (10).
9. Привід на основі синхронізованих гідроциліндрів за пп. 1-8, який відрізняється тим, що містить пристрій (71) регульованого зміщення, який встановлений між механічним передаточним пристроєм і керуючим органом (264) веденого гідроциліндра (20) з можливістю зміщення між положенням веденого гідроциліндра (20) і заданим положенням ведучого гідроциліндра (10).
10. Привід за п. 9, який відрізняється тим, що пристрій (71) зміщення виконаний як пристрій забезпечення кутового зміщення між золотником (264) веденого гідроциліндра (20) і зубчастим вінцем (702), що кінематично зв'язаний з пристроєм (400) передачі обертального руху від ведучої шестірні (150).
11. Реактивне сопло турбореактивного двигуна, що має регульований вихідний переріз, який визначається положенням рухливих стулок, яке відрізняється тим, що містить привід за будь-яким із пп. 1-8 з можливістю одночасного переміщення рухливих стулок.
12. Реактивне сопло турбореактивного двигуна, що має регульовані вихідний переріз й орієнтацію, що визначаються положенням рухливих стулок, яке відрізняється тим, що містить привід за п. 9 або 10 для переміщення рухливих стулок.
13. Турбореактивний двигун, який відрізняється тим, що містить привід за будь-яким із пп. 1-12.
Текст
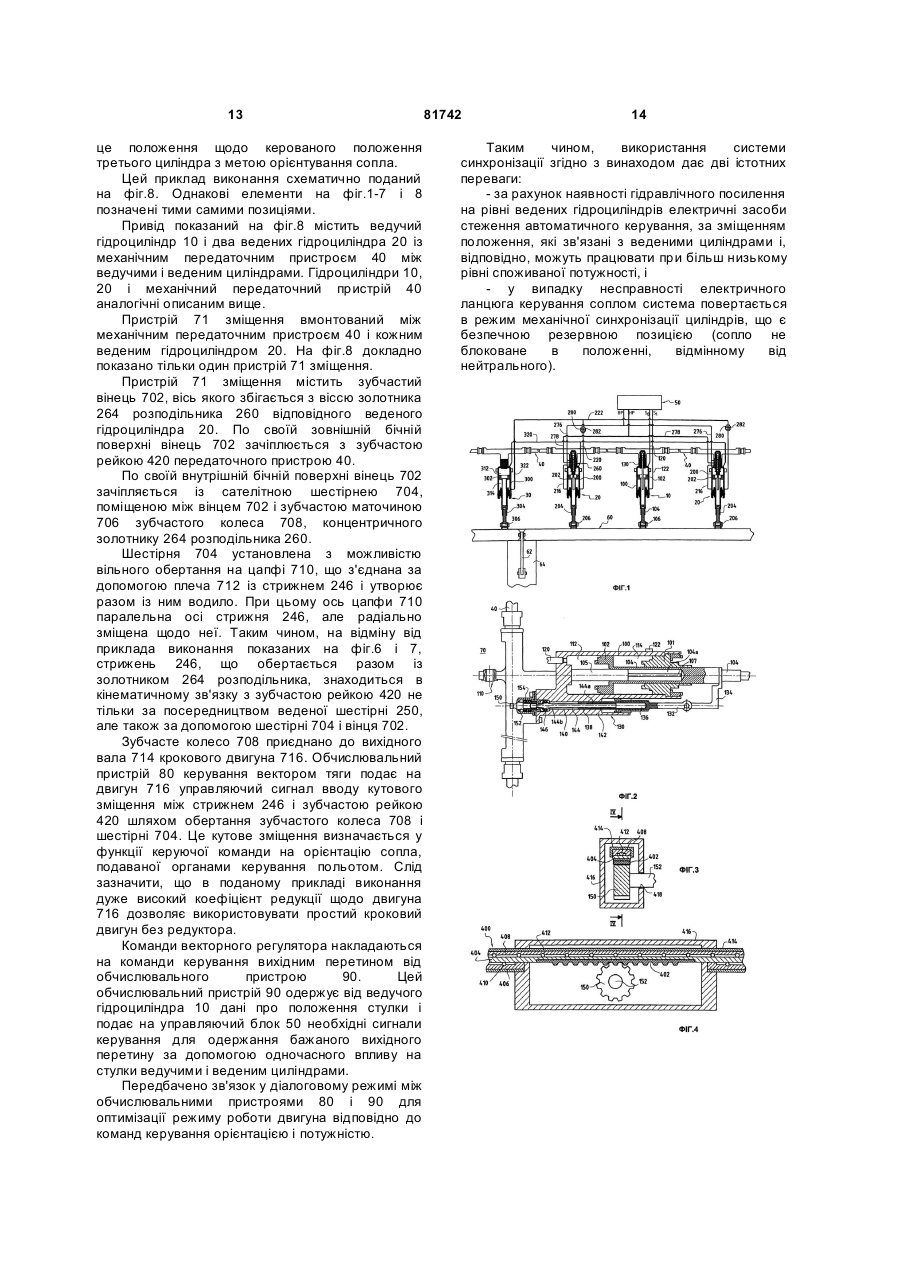
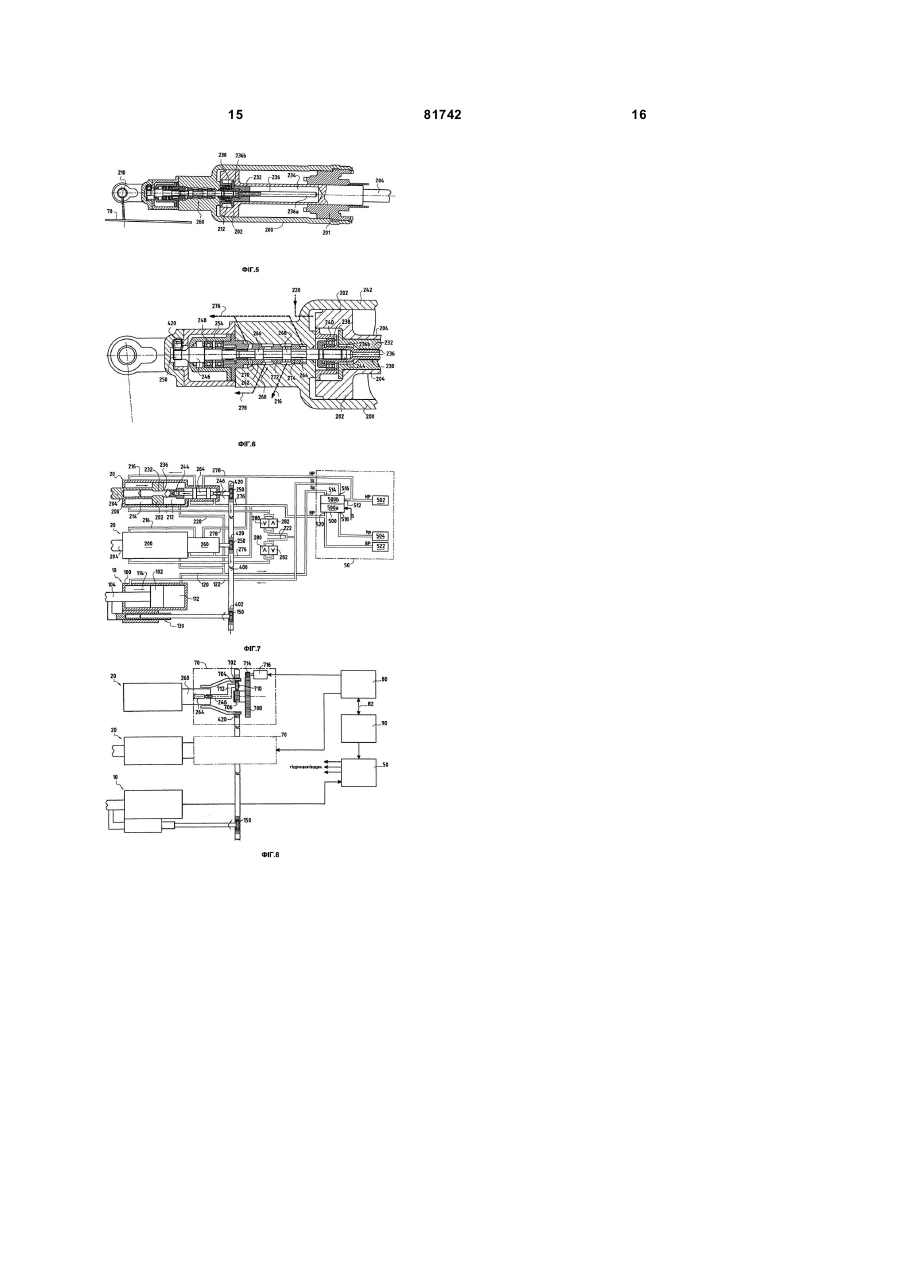
1. Привід на основі синхронізованих гідроциліндрів, який відрізняється тим, що містить гідравлічну керуючу систему (50), ведучий гідроциліндр (10), що має циліндр (100) і поршень (102), що визначає в циліндрі дві порожнини, зв'язані з гідравлічною системою, щонайменше один ведений гідроциліндр (20), що має циліндр (200) і поршень (202), що визначає в циліндрі дві порожнини, із яких щонайменше перша порожнина зв'язана з виходом розподільника (260), зв'язаного з гідравлічною системою (50) і з керуючим органом (264), положення якого визначає тиск у першій порожнині веденого гідроциліндра, і механічний передаточний пристрій (40) для передачі переміщення поршня (102) ведучого гідроциліндра (10) на керуючий орган (264) розподільника (260), зв'язаного з веденим гідроциліндром (20) з можливістю переміщення поршня (202) веденого гідроциліндра (20), містить пристрій (130) перетворення поступального руху поршня (102) ведучого гідроциліндра (10) в обертальний рух ведучої шестірні (150), пристрій (400) передачі обертального руху ведучої шестірні (150) на ведену шестірню (250) і пристрій перетворення обертального руху веденої шестірні в поступальний рух золотника (264) розподільника, зв'язаного з одним або з кожним веденим гідроциліндром. 2. Привід за п. 1, який відрізняється тим, що пристрій перетворення обертального руху веденої шестірні (250) у поступальний рух золотника (264) 2 (19) 1 3 81742 4 пристрій (71) регульованого зміщення, який встановлений між механічним передаточним пристроєм і керуючим органом (264) веденого гідроциліндра (20) з можливістю зміщення між положенням веденого гідроциліндра (20) і заданим положенням ведучого гідроциліндра (10). 10. Привід за п. 9, який відрізняється тим, що пристрій (71) зміщення виконаний як пристрій забезпечення кутового зміщення між золотником (264) веденого гідроциліндра (20) і зубчастим вінцем (702), що кінематично зв'язаний з пристроєм (400) передачі обертального руху від ведучої шестірні (150). 11. Реактивне сопло турбореактивного двигуна, що має регульований вихідний переріз, який визначається положенням рухливих стулок, яке відрізняється тим, що містить привід за будьяким із пп. 1-8 з можливістю одночасного переміщення рухливих стулок. 12. Реактивне сопло турбореактивного двигуна, що має регульовані вихідний переріз й орієнтацію, що визначаються положенням рухливих стулок, яке відрізняється тим, що містить привід за п. 9 або 10 для переміщення рухливих стулок. 13. Турбореактивний двигун, який відрізняється тим, що містить привід за будь-яким із пп. 1-12. Даний винахід відноситься до приводу на основі синхронізованих гідроциліндрів і, зокрема, може використовуватися для одночасного переміщення рухливих стулок реактивних сопел турбореактивного двигуна з регульованим вихідним перетином. Винахід може також використовуватися і для інших цілей, - наприклад, для переміщення кільця керування поворотними лопатками в нерухомому направляючому апараті компресора газової турбіни. У відомому реактивному соплі з регульованим вихідним перетином переміщення рухливих стулок реалізується за допомогою системи гідроциліндрів, що діють на керовані стулки, які, у свою чергу, переміщають ведені стулки. Керовані стулки переміщаються тягами, що шарнірно з'єднані зі штоками гідроциліндрів або з загальним керуючім кільцем, на яке діють гідроциліндри. Механічні засоби забезпечують синхронізацію керованих стулок незалежно від ведених стулок, що не є керованими. Таке реактивне сопло з механічною системою автоматичної синхронізації має недоліки щодо собівартості і маси, а також у зв'язку з наявністю елементів, що взаємно труться у гарячому середовищі. Інше рішення полягає в тому, щоб забезпечити синхронне переміщення стулок з усуненням тертя і тим більше заклинювання між стулками, що потребувало би підвищеного докладання зусилля і могло б викликати ушкодження, що позначилися би на терміні служби стулок, за рахунок того, що функція синхронізації переноситься на рівень гідроциліндрів. Проте відомо, що через неминучий розкид характеристик практично неможливо домогтися одночасного переміщення штоків гідроциліндрів навіть при керуванні гідроциліндрами від загального розподільника гідравлічного текучого середовища. Для рішення цієї проблеми в патентному документі Франції № 9614565 було запропоновано виконання механічного зв'язку між поршнями гідроциліндрів за допомогою зубчастого віденця, що зачіплюється з шестірнями, кожна з яких з'єднана з поршнем гідроциліндра передачею "гвинт-гайка", що перетворює поступальний рух поршня в поворот шестірні. Такий пристрій синхронізації дозволяє надійно забезпечити одночасне зміщення поршнів гідроциліндрів. Проте воно потребує використання зубчастого вінця, спроможного передавати необхідні зусилля для компенсації розбіжностей у ході поршнів, тобто відносно масивного і громіздкого кільця. Задача, на рішення якої спрямований даний винахід, полягає в створенні приводу на основі синхронізованих гідроциліндрів, вільного від зазначених недоліків. Відповідно до винаходу рішення поставленої задачі досягається за рахунок створення приводу на основі синхронізованих гідроциліндрів, що містить: гідравлічну керуючу систему, ведучий гідроциліндр, який має циліндр і поршень, що визначає в циліндрі дві порожнини, зв'язані з гідравлічною системою, щонайменше один ведений гідроциліндр, що має циліндр і поршень, що визначає в циліндрі дві порожнини, із яких, щонайменше, перша порожнина зв'язана з виходом розподільника, причому зазначений розподільник зв'язаний із гідравлічною системою і з керуючим органом, положення якого визначає тиск у першій порожнині веденого гідроциліндра, і механічний передавальний пристрій для передачі переміщення поршня ведучого гідроциліндра на керуючий орган розподільника, зв'язаного з веденим гідроциліндром таким чином, що переміщення поршня веденого гідроциліндра автоматично йде слідом за переміщенням поршня ведучого гідроциліндра на основі команди положення, що надходить від керуючого органа розподільника, зв'язаного із веденим гідроциліндром. Отже, на рівні кожного веденого гідроциліндра задане положення ведучого гідроциліндра, передане механічними засобами, впливає не безпосередньо на поршень веденого гідроциліндра, а на розподільник, зв'язаний з веденим гідроциліндром і який діє, як гідравлічний підсилювач механічного сигналу заданого положення. За рахунок цього механічний пристрій передачі, що служить для переміщення поршня ведучого гідроциліндра, може забезпечуватися більш легкими засобами. Відповідно до особливості приводу но винаході цей механічний передаточний пристрій містить: пристрій перетворення поступального руху поршня ведучого гідроциліндра в 5 обертальний рух ведучої шестірні, передачі обертального руху ведучої шестірні на ведену шестірню й пристрій перетворення обертального руху веденої шестірні в поступальний рух керуючого органа розподільника, зв'язаного з одним або кожним веденим гідроциліндром. В оптимальному варіанті пристрій перетворення обертального руху веденої шестірні в поступальний рух керуючого органа утвореного першою передачею "гвинт-гайка", у якій гвинт зв'язаний з керуючим органом (золотником). Передбачена також друга передача "гвинт-гайка" для перетворення поступального руху поршня веденого гідроциліндра, що діє як гайка, в обертальний рух гвинта другої передачі "гвинтгайка". При цьому золотник і гвинт другої передачі "гвинт-гайка" згвинчені один з одним таким чином, що обертання золотника і гвинта взаємно компенсуються і золотник не здійснює поступального руху, коли рух поршня ведучого гідроциліндра, переданий на золотник, і рух поршня веденого гідроциліндра синхронізовані. Пристрій передачі обертального руху ведучої шестірні на ведену шестірню виконано, наприклад, у виді гнучкої лінійної передачі на опорах катання, що несе зубчасті рейки, із якими зачіпляються шестірні. Один або кожний ведений гідроциліндр може містити першу порожнину, зв'язану з розподільником, що відноситься до веденого гідроциліндра, і другу порожнину, що гідравлічно з'єднана з порожниною ведучого гідроциліндра. У варіанті здійснення з кожним веденим гідроциліндром зв'язаний двоходовий розподільник, зв'язаний із першою і другою порожнинами веденого гідроциліндра. У тому випадку, коли поршні гідроциліндрів приєднані до одного керуючого кільця, привід переважно містить один ведучий гідроциліндр і два ведених гідроциліндра. Якщо є необхідність у додатковому гідроциліндрі, цей додатковий гідроциліндр може являти собою супровідний гідроциліндр, приєднаний до гідравлічної системи паралельно ведучому гідроциліндру. При цьому присутності одного ведучого і двох ведених гідроциліндрів достатньо для забезпечення бажаної синхронізації. Винахід буде більш зрозумілим із нижченаведеного докладного опису, що не обмежує об'єм винаходу і містить посилання на креслення, що прикладаються: на фіг.1 показано структурну схему приводу по винаході в прикладі його використання для стулок реактивного сопла регульованого перетину, на фіг.2 показано вид з частковим перерізом ведучого гідроциліндра привода по винаході, на фіг.3 показано в збільшеному масштабі частину гідроциліндра по фіг.2, на фіг.4 показано вид з частковим перерізом по площині IV-IV на фіг.З, на фіг.5 показано вид з частковим перерізом веденого гідроциліндра привода по фіг.1, на фіг.6 показано в збільшеному масштабі частину гідроциліндра по фіг.5, 81742 6 на фіг.7 наведена схема, що ілюструє принцип дії приводу по фіг.1, на фіг.8 наведена структурна схема приводу по винаході в прикладі виконання для стулок векторного реактивного сопла. Даний опис відноситься, в основному, до прикладу використання винаходу як приводу рухливих заслінок або стулок, таких як рухливі стулки сопла турбореактивного двигуна з регульованим вихідним перетином. Фіг.1 схематично зображує привід відповідно до винаходу, що містить ведучий гідроциліндр 10, два ведених гідроциліндра 20, супроводжуючий гідроциліндр 30, механічний передаточний пристрій 40 між ведучим і двома веденими гідроциліндрами і гідравлічною керуючою системою. У наведеному прикладі виконання гідроциліндри 10, 20 і 30 діють на керуюче кільце 60, до котрого шарнірно приєднані тяги 62, що з'єднують керуюче кільце 60 із рухливими стулками 64 сопла. На фіг.1 показана одна тяга 62 і одна стулка 64, причому привід і керуюче кільце показані в розгортці на площину. Загальне число гідроциліндрів вибирають переважно рівним трьом для утворення статичної системи. При виборі трьох гідроциліндрів один служить ведучим, а два інших - веденими, тобто переміщення їхніх поршнів залежить від переміщення ведучого гідроциліндра. Якщо в системі передбачено більше трьох гідроциліндрів для того, щоб забезпечити зусилля, необхідні для зміщення керуючого кільця без небажаного збільшення розмірів гідроциліндрів, додатковий гідроциліндр або гідроциліндри можуть бути супроводжуючими гідроциліндрами (у прикладі виконання по фіг.1 передбачений один супроводжуючий гідроциліндр). Живлення супроводжуючого гідроциліндра або гідроциліндрів проводиться від керуючої гідравлічної системи, паралельно ведучому гідроциліндру, при цьому ступінь заданої синхронізації може забезпечуватися ведучим гідроциліндром і двома веденими гідроциліндрами. Варто зауважити, що привід може використовуватися без керуючого кільця, тобто гідроциліндри можуть бути зв'язані тягами безпосередньо зі стулками або іншими органами, що повинні одночасно приводитися в дію. У прикладі виконання, докладно показаному на фіг.1 і 2, ведучий гідроциліндр 10 містить циліндр 100 із поршнем 102, що встановлений з можливістю переміщення по осі циліндра і жорстко зв'язаний зі штоком 104, кінець якого зв'язаний із керуючім кільцем 60 шарніром 106. Цей вузол штока 104 із поршнем 102 направляється при русі підшипником 101, що щільно закриває циліндр 100. Датчик лінійного положення, що містить корпус 105, зв'язаний з циліндром 100, і стрижень 107, закріплений у порожнині 104а штока 104, дозволяє вимірювати положення штока 104 по всій довжині робочого хода гідроциліндра. Сигнал, вироблюваний цим датчиком положення, показує дійсне положення рухливих стулок і передається на пристрій керування конфігурацією сопла. Своїм заднім кінцем, протилежним порожнині для 7 розміщення штока 104, циліндр 100 укріплений на стінці 70 за допомогою шарніра 110. Поршень 102 розділяє внутрішній об'єм циліндра 100 на дві порожнини, 112 і 114. Задня порожнина 112 зв'язана з гідравлічним блоком 50 керування сопла гідролінією 120, а передня порожнина 114 зв'язана із зазначеним блоком 50 керування гідролінією 122. Передача 130 "гвинт-гайка" перетворює поступальне зміщення поршня 102 в обертальний рух (фіг.2). У даній передачі 130 гайка 132 виконана у виді циліндричного стрижня, один кінець котрого жорстко зв'язаний із лапою 134, жорстко зв'язаною, у свою чергу, із штоком 104 поршня. На іншому кінці стрижня 132 виконана глуха осьова проточка 136, яка має різьбу 138, щонайменше, на частині своєї довжини. Стрижень 132 може сковзати в порожнині 140, яка утворена в корпусі 142, що жорстко зв'язаний із корпусом циліндра 100, наприклад, сформований як одне ціле з даним корпусом. Гвинт 144 передачі 130 "гвинт-гайка" має кінцеву частину 144а з різьбою і входить у проточку 136 гайки 132. Інший кінець 144Ь гвинта, що не має різьби, утримується в підшипнику 146, встановленому в корпусі 142. Гвинт 144 приводить в обертання ведучу шестірню 150 усередині корпуса 142.Шестірня 150 може бути встановлена безпосередньо на кінці гвинта 144 або ж, як показано на фіг.2, вона може бути встановлена на кінці стрижня 152, що зв'язаний із гвинтом 144 для спільного обертання, але може зміщуватися по осі щодо нього. Зв'язок між гвинтом 144 і стрижнем 152 для забезпечення їхнього спільного обертання може бути виконаний, наприклад, у виді взаємодіючих ділянок (лисок) і граней відповідної форми, виконаних на частинах гвинта 144 і стрижня 152. Для перетворення обертального руху в поступальний без заклинювання можуть використовуватися також будь-які інші механічні засоби, причому ці засоби не обов'язково повинні бути точно центровані по осі. Стрижень 152 встановлений у підшипнику 154 усередині кришки, укріпленої на корпусі 142. Таке рішення спрощує установку головної шестірні 150. Ведуча шестірня 150 зачіплюється з відрізком зубчастої рейки 402 механічного передаточного пристрою 40 (фіг.3 і 4). У прикладі виконання показаному на фіг.2 система стеження за рухом поршня 102, з передачею на шестірню 150 розташована збоку від циліндра 100. У варіанті виконання з використанням щонайменше одного супроводжуючого циліндра датчик 105 положення може бути встановлений по осі супроводжуючого циліндра, і тоді в ведучому циліндрі 100 залишається місце для розміщення по осі передачі 130, як це показано на фіг.1. У цьому випадку ведучий гідроциліндр 10 може бути зроблений більш компактним. Механічний передаточний пристрій 40 в оптимальному варіанті утворено гнучкою лінійною передачею 400 на опорах кугщня, наприклад, такого типу як передача марки "Teleflex Syneravia" французької фірми Intertechnique. Гнучка лінійна 81742 8 передача містить гнучку металеву смугу 404, що ковзає між двома стрічками 406,408 з опорою на кульки або ролики 410,412, при цьому пристрій поміщений у жорсткий захисний кожух 414. На ділянці взаємодії з ведучою шестірнею 150 кожух 414 і одна стрічка 406 надрізані, причому надрізані кінці стрічки відігнуті усередину і закривають порожнину розміщення кульок 4Ю.Відрізок зубчастої рейки 402 жорстко при кріплений, наприклад приварений, до розкритої частини смуги 404 і (^ковзає разом з нею. Захисна коробка 416 закриває зубчасту рейку 402, зони її з'єднання з іншою частиною лінійної передачі 400 і ведучу шестірню 150. Захисна коробка 416 прикріплена до гідроциліндру 10 і до кожуха 414. Стрижень 152, що несе шестірню 150, проходить через підшипник 418, встановлений у коробці 416. На фіг.4, як і на фіг.1, механічний передаточний пристрій 40 представлений у виді розгортай на площину. Кожний ведений гідроциліндр 20 (фіг.1, 5 і 6) містить циліндр 200 із поршнем 202, що встановлений з можливістю переміщення по осі циліндра і жорстко зв'язаний зі штоком 204, що зв'язаний із керуючим кільцем 60 шарніром 206. На своєму передньому кінці циліндр 200 закритий підшипником 201 штока, через ущільнення якого проходить шток 204. Своїм заднім кінцем, протилежним порожнині для розміщення штока 204, циліндр 200 укріплений на стінці 70 за допомогою шарніра 210. Поршень 202 розділяє внутрішній об'єм циліндра 200 на дві порожнини, 212 і 214 (фіг.7). Задня порожнина 212 зв'язана з гідравлічним блоком 50 керування сопла гідролінією 220, а передня порожнина 214 постачається розподільником 260, вихід якого зв'язаний із порожниною 214 гідролінією 216. Розподільник 260 (фіг.6) містить циліндр 262, всередині якого встановлений з можливістю ковзання золотник 264 із поясками 266, 268 на керуючій (золотниковій) тязі, що утворюють три порожнини 270, 272, 274. Своїми кінцями розподільник зв'язаний гідролінією 276 із виходом ВР низького тиску блока 50 керування, у той час як проміжна порожнина розподільника зв'язана гідролінією 278 із виходом HP високого тиску блока 50 керування. Таким чином, у проміжній порожнині розподільника створюється також тиск, як і тиск у порожнині 114 ведучого гідроциліндра, що служить опорним тиском. У залежності від осьового положення золотника 264 розподільник 260 установлює повідомлення порожнині 214 циліндра або з гідролінією 276, або з гідролінією 278. Крім того, порожнина 214 гідроциліндра 20 зв'язана за допомогою двох запобіжних, включених зустрічно, захисних клапанів 280, 282 із гідролінією 222, що йде до блока 50 керування (фіг.7). За рахунок цього тиск у порожнині 214 веденого гідроциліндра не може занадто відхилятися від величини тиску в порожнині 114, що править за опорний тиск. У противному випадку виникав би ризик "скручування" сопла. Передача 230 "гвинт-гайка" (фіг.5, 6) перетворює поступальний рух поршня 202 в 9 обертальні/рух. В цій системі гайка 232 жорстко з'єднана з поршневим штоком 204 і входить у подовжню глуху проточку 234, що виконана в штоку 204 і відкрита до його заднього кінця. Гайка 232 займає тільки частину проточки 234 поблизу її відкритого кінця.Гвинт 236 передачі 230 має кінцеву ділянку 236а з різьбою, що вгвинчена у гайку 232 і може проходити далі в проточку 234 (фіг.5). На задній кінцевій ділянці 236Ь гвинт 236 без різьби підтримується в підшипнику 238, встановленому в опорі 240, жорстко прикріпленою до корпуса 242 циліндра 200. Гвинтова пара 232-236 передачі 230 "гвинтгайка" ідентична гвинтовій парі 132-144 передачі 130 "гвинт-гайка" і має те ж призначення, тобто за допомогою цих пар поступальний рух поршнів ведучого і веденого циліндрів перетворюється в обертальний рух гвинтів 144 і 236. На своїй кінцевій ділянці 236Ь гвинт 236 має осьову глуху проточку 244 з різьбою, у яку вгвинчено різьбовий кінець золотника 264 розподільника 260 (фіг.6). Таким чином, золотник 264 і гвинт 236 утворюють ще одну передачу "гвинт-гайка", у якій гайка утворена гвинтом 236 передачі 230 "гвинт-гайка". У цій третій передачі 264-236 "гвинт-гайка" крок гвинта має той же напрямок, що й у передачі 230. На своєму другому кінці золотник 264 з'єднаний із стрижнем 246 з можливістю їхнього спільного обертання, але з можливістю вільного відносного зміщення по осі. Зв'язок між керуючим золотником 264 і кінцем стрижня 246 може бути виконаний, наприклад, у виді взаємодіючих ділянок (лисок) і граней відповідної форми, виконаних на відповідних частинах елементів 264, 246. Для перетворення обертального руху в поступальний без заклинювання можуть використовуватися також будь-які інші механічні засоби, причому ці засоби не обов'язково повинні бути точно центровані по осі. На своєму другому кінці стрижень 246 несе ведену шестірню 250. Стрижень 246 встановлений у підшипнику 248 усередині кришки 254, укріпленої на корпусі 252. Ведена шестірня 250 зачіплюється з відрізком зубчастої рейки 420 механічного передаточного пристрою 40. Установка відрізка зубчастої рейки 420 і його зв'язок із веденою шестірнею 250 здійснюється таким же чином, як це було описано вище стосовно до відрізка зубчастої рейки 404 і ведучої шестірні 150. Супроводжуючий гідроциліндр 30 (фіг.1) містить циліндр 300 із поршнем 302, що встановлений, з можливістю переміщення по осі циліндра і жорстко зв'язаний зі штоком 304, зв'язаним із керуючим кільцем 60 шарніром 306. Своїм заднім кінцем, протилежним порожнині для розміщення штока 304, циліндр 300 укріплений на стінці 70 за допомогою шарніру (не показано). Поршень 302 розділяє внутрішній об'єм циліндра 300 на дві порожнини, 312 і 314. Задня порожнина 312 зв'язана з гідравлічним блоком 50 керування гідролінією 320, а передня порожнина 314 зв'язана з гідравлічним блоком 50 керування гідролінією 322. 81742 10 Гідролінії 120, 220, 320 спільно приєднані до виходу S0 блока 50, а гідролінії 122, 222 і 322 разом приєднані до іншого виходу (S1) блока 50. Таким чином, ведучий гідроциліндр 10 і супроводжуючий гідроциліндр 30 живиться текучим середовищем паралельно. Що ж стосується ведених гідроциліндрів 20, їхні порожнини 212 живляться паралельно з порожнинами 112 і 312 гідроциліндрів 10 і 30, а їхні порожнини 214 живляться від розподільника 260. Далі буде описана робота приводу згідно з винаходом з посиланням на фіг.7, що зображує принципову схему цієї системи (за винятком супроводжуючого циліндра 30) і деякі елементи блока 50. Насос 502, який називають насосом сопла, створює високий тиск HP, призначений для приведення в дію циліндрів» які діють на рухливі стулки з метою збільшення (відкриття) або зменшення (закриття) вихідного перетину сопла, через який виводять гази. У даному випадку передбачено використання спеціального насоса 502 для створення рівня високого тиску, що значно перевищує рівень високого тиску, який забезпечується насосом 504 високого тиску загальної гідравлічної системи турбореактивного двигуна. Високий тиск HP подається на вихід SO або вихід S1 за допомогою серво-клапану 500, у якому тиск HP поданий на його вхід 512, а виходи 514, 516 зв'язані з виходами SO, SI. Можна використовувати сервоклапан із двома ступіня-ми 500а, 500b. Високий тиск HP комутується другою ступінню 500b по команді першої ступіні 500а. На входи 518, 520 ступіні 500а поданий також високий тиск hp із контуру насоса 504 і низький тиск ВР від насоса 522 низького тиску загальної гідравлічної системи. Перший ступінь управляється сигналом S, наприклад, електричним сигналом керування гідравлічним розподільником. Високі і низькі тиски HP, BP від виходів керуючого блока 50 направляються до розподільників ведених гідроциліндрів по гідролініям 278 і 276 відповідно. Подача високого тиску HP на вихід S0 по команді у виді сигналу S викликає, наприклад, відкриття сопла; при цьому на вихід S1 подається низький тиск ВР. Високий тиск HP подається паралельно в порожнини 112, 212 і 312 гідроциліндрів 10, 20, 30, у той час як їхні порожнини 114, 214, 314 знаходяться під низьким тиском ВР. При цьому рівні тиски HP і ВР модулюються в залежності від переданих соплом зусиль за допомогою сервоклапана 500 (стосовно до порожнин 112і 114, 212, 312 і 314) і розподільників 260 (стосовно до порожнин 214). Подача тиску HP або ВР у порожнини 114, 214 управляється неузгодженістю положення між ведучими і веденим циліндрами, тобто погрішністю регулювання. Переміщення штока 104 ведучого гідроциліндра копіюється в кожному веденому гідроциліндрі 20 за допомогою передачі 130 "гвинт-гайка" ведучої шестірні 150, гнучкої лінійної передачі 400 і веденої шестірні 250. 11 Обертання веденої шестірні 250 передається за допомогою стрижня 246 на золотник 264 керування розподільника 260. За рахунок різьби осьової проточки 244 гвинта 236 золотник 264 утворить передачу "гвинт-гайка", що перетворить обертання золотника в його поступальний рух таким чином, що тиск ВР подається в порожнину 214 циліндра. При переміщенні поршня 202 циліндра його поступальний рух перетворюється в обертальний рух гвинта 236. Будь-яка десинхронізація поступального руху поршнів 102, 202 перетворюється в осьове зміщення золотника 264, що тим самим модулює тиск, який подають у порожнину 214 для оперативної компенсації цієї десинхронізації. Напрямок впливу пояска 268 розподільника 260 під впливом тиску, який подають гідролінією 216, вибирають відповідно до напрямку кроку гвинта 244 і 236 для того, щоб зворотний зв'язок у системі стеження, здійснювався в потрібному напрямку з урахуванням рівня тиску в гідролініях 276 і 278. Крок гвинта для пари золотник 264 - проточка 244 вибирають з урахуванням кроку гвинта для пари гвинт 236-гайка 232 таким чином, що коли рух поршнів 102 і 202 синхронізовано, обертання гвинта 236, що утворює гвинт зворотного зв'язку, компенсує обертання золотника 264, і останній залишається в нерухомому положенні, тобто в рівноважному стані у відношенні поступального руху. Необхідний крок різьби проточки 244 може бути визначений у такий спосіб. Максимальне гідравлічне посилення золотника повинно досягатися тоді, коли неузгодженість положення між веденим і ведучим гідроциліндрами досягає визначеного максимального розміру, що є функцією механічної спроможності сопла витримувати "деформацію" без заклинювання і без ризику необоротної деформації частин, а також спроможності літака витримувати реактивну тягу, зміщену щодо його осі. На основі величини максимального гідравлічного посилення розподільника 260, що може бути переведена в максимальний хід золотника 264 (який складає, наприклад, 1мм), і розміру припустимої неузгодженості синхронізації між гідроциліндрами, що може бути переведена у відсотки ходу поршнів (наприклад, 2%), може бути встановлений крок різьби проточки 244 з урахуванням того, що крок гвинта передач 130 і 230 "гвинт-гайка" вибирається за умови повернення здійснюваного ними перетворення поступального руху в обертальний. Крім того, для зубчастої рейки 402 вибирають відносно довгий хід, наприклад, що складає декілька сантиметрів, із тим, щоб знизити вплив зазорів або вигинів на рівні механічного передатного пристрою 40. Цей хід дозволяє визначити діаметр шестірень 150 і 250. Подача високого тиску HP на вихід S1 по команді у формі сигналу S викликає закриття 81742 12 сопла, при цьому на вихід SO подається низький тиск ВР. Синхронізація зміщення поршнів гідроциліндрів 10 і 20 здійснюється аналогічно описаному вище. На фіг.7 стрілками показані напрямки руху елементів і потоків текучого середовища слідом за втягуванням поршня 104 ведучого гідроциліндра при "правому" кроці всіх гвинтів. Таким чином, привід відповідно до винаходу має ту відмінну рису, що механічний передаточний пристрій, що копіює рух ведучого гідроциліндра, не піддається значним навантаженням. Цей передаточний пристрій копіює рух ведучого гідроциліндра і передає його на управляючий орган розподільника, що діє як гідравлічний підсилювач. Дійсно, ведена шестірня обертається разом з органом керування (золотником) розподільника, що не має безпосереднього кінематичного зв'язку з гайкою, жорстко зв'язаною з поршнем веденого гідроциліндра. 18 За рахунок цього механічний передаточний пристрій може бути значно більш легшим в порівнянні з пристроями, у яких використовуються зубчасті вінець, що знаходяться в механічному кінематичному зв'язку з поршнями гідроциліндрів. Крім того, виявилося, що достатньо управляти, за допомогою розподільника, тиском тільки в одній з порожнин ведених гідроциліндрів. Керування тиском у двох порожнинах ведених гідроциліндрів за допомогою розподільників, що приводяться від ведучого гідроциліндра, може бути передбачено, але не є необхідним. Використання гнучкої лінійної передачі на опорах катання є вигідним через її невеличку вагу, спроможності забезпечувати ефективну механічну синхронізацію без впливу погрішності виготовлення і теплового розширення, а також завдяки її довговічності. Можливо також використання інших засобів механічної трансмісії з зубчастим зачепленням із шестірнями, такими як зубчастий вінець або гнучкі вали з безкінечними гвинтами. При цьому завдяки невисокому необхідному зусиллю синхронізації стає можливим зменшити розміри цих елементів. У приведеному вище описі показано використання системи згідно з винаходом стосовно до рухливих стулок реактивних сопел перемінного перетину. Як уже було зазначено, винахід не обмежується цим застосуванням і може використовуватися для керування гідроциліндрами рухливих органів не тільки стулок, але й інших компонентів, що повинні зміщуватися одночасно, або для керування стулками поворотних реактивних сопел ("сопел із керованим вектором тяги"). У цьому останньому випадку стулки поворотного реактивного сопла управляються за допомогою трьох гідроциліндрів, синхронізованих, щонайменше, механічно й оснащених двома пристроями зміщення, що управляються електричними засобами і впливають на положення двох відповідних циліндрів для того, щоб змінити 13 це положення щодо керованого положення третього циліндра з метою орієнтування сопла. Цей приклад виконання схематично поданий на фіг.8. Однакові елементи на фіг.1-7 і 8 позначені тими самими позиціями. Привід показаний на фіг.8 містить ведучий гідроциліндр 10 і два ведених гідроциліндра 20 із механічним передаточним пристроєм 40 між ведучими і веденим циліндрами. Гідроциліндри 10, 20 і механічний передаточний пристрій 40 аналогічні описаним вище. Пристрій 71 зміщення вмонтований між механічним передаточним пристроєм 40 і кожним веденим гідроциліндром 20. На фіг.8 докладно показано тільки один пристрій 71 зміщення. Пристрій 71 зміщення містить зубчастий вінець 702, вісь якого збігається з віссю золотника 264 розподільника 260 відповідного веденого гідроциліндра 20. По своїй зовнішній бічній поверхні вінець 702 зачіплюється з зубчастою рейкою 420 передаточного пристрою 40. По своїй внутрішній бічній поверхні вінець 702 зачіпляється із сателітною шестірнею 704, поміщеною між вінцем 702 і зубчастою маточиною 706 зубчастого колеса 708, концентричного золотнику 264 розподільника 260. Шестірня 704 установлена з можливістю вільного обертання на цапфі 710, що з'єднана за допомогою плеча 712 із стрижнем 246 і утворює разом із ним водило. При цьому ось цапфи 710 паралельна осі стрижня 246, але радіально зміщена щодо неї. Таким чином, на відміну від приклада виконання показаних на фіг.6 і 7, стрижень 246, що обертається разом із золотником 264 розподільника, знаходиться в кінематичному зв'язку з зубчастою рейкою 420 не тільки за посередництвом веденої шестірні 250, але також за допомогою шестірні 704 і вінця 702. Зубчасте колесо 708 приєднано до вихідного вала 714 крокового двигуна 716. Обчислювальний пристрій 80 керування вектором тяги подає на двигун 716 управляючий сигнал вводу кутового зміщення між стрижнем 246 і зубчастою рейкою 420 шляхом обертання зубчастого колеса 708 і шестірні 704. Це кутове зміщення визначається у функції керуючої команди на орієнтацію сопла, подаваної органами керування польотом. Слід зазначити, що в поданому прикладі виконання дуже високий коефіцієнт редукції щодо двигуна 716 дозволяє використовувати простий кроковий двигун без редуктора. Команди векторного регулятора накладаються на команди керування вихідним перетином від обчислювального пристрою 90. Цей обчислювальний пристрій 90 одержує від ведучого гідроциліндра 10 дані про положення стулки і подає на управляючий блок 50 необхідні сигнали керування для одержання бажаного вихідного перетину за допомогою одночасного впливу на стулки ведучими і веденим циліндрами. Передбачено зв'язок у діалоговому режимі між обчислювальними пристроями 80 і 90 для оптимізації режиму роботи двигуна відповідно до команд керування орієнтацією і потужністю. 81742 14 Таким чином, використання системи синхронізації згідно з винаходом дає дві істотних переваги: - за рахунок наявності гідравлічного посилення на рівні ведених гідроциліндрів електричні засоби стеження автоматичного керування, за зміщенням положення, які зв'язані з веденими циліндрами і, відповідно, можуть працювати при більш низькому рівні споживаної потужності, і - у випадку несправності електричного ланцюга керування соплом система повертається в режим механічної синхронізації циліндрів, що є безпечною резервною позицією (сопло не блоковане в положенні, відмінному від нейтрального). 15 81742 16
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive on basis of synchronized hydro-cylinders (variants), reactive nozzle of turbo-jet engine (variants) and turbo-reactive engine
Автори англійськоюВrосаrd Jean-Marie, Kettler Daniel, Lavie Alain, MICHAU MARION
Назва патенту російськоюПривод на основе синхронизированных гидроцилиндров (варианты), реактивное сопло турбореактивного двигателя (варианты) и турбореактивный двигатель
Автори російськоюБрокард Жан-Мари, Кеттлер Даниель, Ляви Ален, Мишо Марион
МПК / Мітки
МПК: F15B 13/02, F15B 11/00, F02K 1/15
Мітки: турбореактивний, сопло, варіанти, реактивне, турбореактивного, привід, основі, гідроциліндрів, двигуна, синхронізованих, двигун
Код посилання
<a href="https://ua.patents.su/8-81742-privid-na-osnovi-sinkhronizovanikh-gidrocilindriv-varianti-reaktivne-soplo-turboreaktivnogo-dviguna-varianti-ta-turboreaktivnijj-dvigun.html" target="_blank" rel="follow" title="База патентів України">Привід на основі синхронізованих гідроциліндрів (варіанти), реактивне сопло турбореактивного двигуна (варіанти) та турбореактивний двигун</a>
Реактивне сопло турбореактивного двигуна
Номер патенту: 46171
Опубліковано: 15.05.2002
Автори: Роллен Жилль Луі, Шар'є Жилль Ален, Гіонне Ксав'є Жан-Мішель Андре
Мітки: двигуна, реактивне, турбореактивного, сопло
Формула / Реферат:
1. Реактивне сопло турбореактивного двигуна, встановленого на надзвуковому літаку, що включає розташований в зовнішньому обтічнику канал відведення вихлопних газів, по якому при роботі двигуна витікає газовий струмінь, декілька гарячих поворотних щитків, що монтуються в нижньому кінці каналу, декілька холодних поворотних щитків, що монтуються в нижньому кінці обтічника, механізм реверса тяги з двома ідентичними поворотними стулками, що...
Форсажне кільце для двоконтурного турбореактивного двигуна, форсажний пристрій і турбореактивний двигун
Номер патенту: 76298
Опубліковано: 17.07.2006
Автори: Ракотондреніб Б'єн-Еме, Олів'є, Соло, Самюель, Філіпп, Тушо Стефан, Анрі, Гі, Рош Жак, Андре, Мішель, Бюнель Жак, Марсель, Артюр
Мітки: пристрій, двигуна, форсажне, двигун, форсажний, турбореактивного, двоконтурного, турбореактивний, кільце
Формула / Реферат:
1. Форсажне кільце для двоконтурного турбореактивного двигуна, в якому температура потоку відпрацьованих газів, що являє собою первинний контур, перевищує температуру повітряного потоку, що являє собою вторинний контур, при цьому кільце (21) має поворотну вісь симетрії, яка збігається з віссю обертання турбореактивного двигуна, містить, з одного боку, передній кільцевий кожух, що утворює кільцевий канал, відкритий в осьовому напрямі у бік...
Реактивне сопло
Номер патенту: 15422
Опубліковано: 30.06.1997
Автор: Маковій Вячеслав Степанович
МПК: F02K 9/97
Текст:
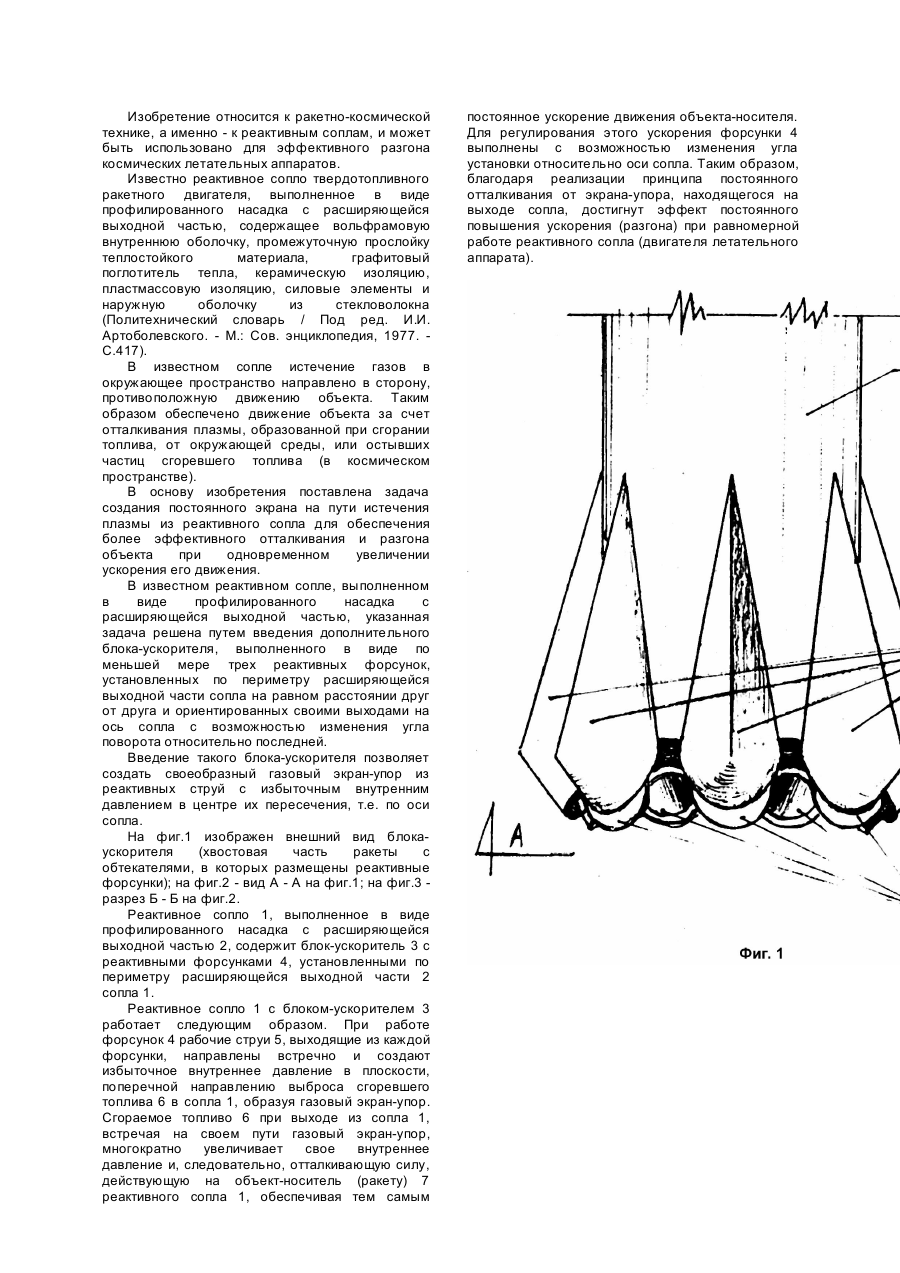
...меньшей мере трех реактивных форсунок, установленных по периметру расширяющейся выходной части сопла на равном расстоянии друг от друга и ориентированных своими выходами на ось сопла с возможностью изменения угла поворота относительно последней. Введение такого блока-ускорителя позволяет создать своеобразный газовый экран-упор из реактивных струй с избыточным внутренним давлением в центре их пересечения, т.е. по оси сопла. На фиг.1 изображен...
Пристрій реверсування тяги турбореактивного двоконтурного двигуна
Номер патенту: 78810
Опубліковано: 25.04.2007
Автори: Бірюков Сергій Петрович, Шерембей Борис Сергійович, Бугрін Володимир Миколайович, Сопітько Сергій Вячеславович
МПК: F02K 3/00, F02K 1/12, B64D 31/00
Мітки: турбореактивного, двоконтурного, реверсування, двигуна, тяги, пристрій
Формула / Реферат:
1. Пристрій реверсування тяги турбореактивного двоконтурного двигуна, що містить нерухомий корпус з розміщеними навколо синхронізуючого кільця відхиляючими ґратами, навколо яких рухомо встановлений обтічник, взаємозв'язаний із синхронізуючим кільцем і поворотними передніми та задніми стулками, шарнірно об'єднаними в пари, V-подібні в положенні реверсування, який відрізняється тим, що обтічник взаємозв'язаний із синхронізуючим кільцем за...
Підвіска турбореактивного двигуна
Номер патенту: 74371
Опубліковано: 15.12.2005
Автори: Юе Патрік, Брефор Франсуа, Паске Фелікс Жан-Клод
МПК: B64D 27/00
Мітки: турбореактивного, двигуна, підвіска
Формула / Реферат:
1. Підвіска турбореактивного двигуна, що має в своєму складі пристрій кріплення (5) на нерухомій конструкції (8), що містить основну деталь (17), закріплену на нерухомій конструкції (8), яка відрізняється тим, що основна деталь (17) і нерухома конструкція з'єднані за допомогою вертикального штиря (26), що містить в середній частині виступ (28), що спирається на основну деталь (17), верхній виступ (35), розташований над пластиною (29), яка...