Система керування і контролю положення органів регулювання ядерного реактора

Формула / Реферат
1. Система керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування, кожен з яких складається із пристрою вводу вхідних сигналів, пристрою формування команд керування, пристрою розмноження сигналів, пристрою оптичного зв'язку і множину каналів силового керування органами регулювання, кожен з яких містить блок силового керування, яка відрізняється тим, що канал силового керування додатково містить резервний блок силового керування з функціями основного блока силового керування, система додатково містить пристрій прийому команд керування, при цьому кожний блок силового керування з'єднаний з двома пристроями прийому команд керування, пристрій формування команд керування містить вхідний регістр, блок алгоритмів і мажоритарний блок, при цьому блок алгоритмів з'єднаний з вхідним регістром для отримання цифрових значень команд керування, де кожний блок алгоритмів з'єднаний з кожним каналом формування команд керування для отримання декількох цифрових значень команд керування від вхідних регістрів, мажоритарний блок з'єднаний з блоком алгоритмів, де кожний мажоритарний блок з'єднаний з кожним каналом формування команд керування для отримання декількох сигналів від блоків алгоритмів, пристрій прийому команд керування з'єднаний з каналом формування команд керування для отримання команд керування від пристроїв оптичного зв'язку, де кожний із пристроїв прийому команд керування з'єднаний з кожним каналом формування команд керування для отримання декількох команд керування від пристроїв оптичного зв'язку.
2. Система за п. 1, яка відрізняється тим, що блок силового керування основний і блок силового керування резервний є абсолютно автономними пристроями і підключені паралельно до блока електромагнітів приводу, при цьому відключення або зворотне підключення кожного з блоків силового керування не залежить одне від одного.
3. Система за п. 1, яка відрізняється тим, що вхідний регістр з'єднаний з пристроєм вводу вхідних сигналів для отримання цифрових значень команд керування, блок алгоритмів з'єднаний з вхідним регістром для отримання цифрових значень команд керування, де кожний блок алгоритмів з'єднаний з кожним каналом формування команд керування для отримання декількох цифрових значень команд керування від вхідних регістрів, при цьому блок алгоритмів логічно обробляє цифрові значення команд керування і генерує вихідний сигнал на мажоритарний блок, мажоритарний блок з'єднаний з блоком алгоритмів для отримання команд керування від блока алгоритмів, де кожний мажоритарний блок з'єднаний з кожним із каналів формування команд керування для отримання декількох команд керування від блоків алгоритмів, при цьому мажоритарний блок формує і генерує сигнал групового і індивідуального керування (ГІК) і команд керування, якщо отримані сигнали хоча б від двох каналів, пристрій прийому команд керування з'єднаний з каналом формування команд керування для прийому команд керування від пристроїв оптичного зв'язку, де кожний пристрій прийому команд керування з'єднаний з кожним каналом формування команд керування для отримання декількох команд керування від пристроїв оптичного зв'язку, при цьому пристрій прийому команд керування формує та генерує сигнал ГІК і команд керування, якщо отримані команди керування хоча б від двох каналів формування команд керування, а кожний блок силового керування з'єднаний з двома пристроями прийому команд керування.
4. Система за п. 1, яка відрізняється тим, що лінії передачі команд керування та попереджувального захисту являють собою оптичні канали зв'язку, які включають триканальну оптичну мережу "точка-точка" з триканальним часовим резервуванням по кожному каналу, лінії проходження сигналів аварійного захисту являють собою прямі електричні триканальні зв'язки.
5. Система за п. 1, яка відрізняється тим, що структура передачі сигналів аварійного захисту до вихідних сигналів реалізована через різні субблоки трьох каналів з активним розмноженням для кожного органу регулювання та за принципом "активного поводження" при відмові.
6. Система керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування і множину каналів силового керування, кожний з яких містить блок силового керування, яка відрізняється тим, що блок силового керування містить пристрій електроніки і пристрій силових приладів.
7. Система керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування, кожний із яких включає пристрій розмноження сигналів і множину каналів силового керування, кожний із яких включає блок силового керування основний і блок силового керування резервний, яка відрізняється тим, що в канал формування команд керування додатково введений пристрій розмноження сигналів, до того ж пристрій розмноження сигналів містить вузол прийому та змішування команд прискореного попереджувального захисту (ППЗ) і аварійного захисту (AЗ) та розмноження, вузол розмноження команд AЗ, при цьому вузол розмноження команд AЗ з'єднаний з вузлом прийому, змішування команд ППЗ і AЗ та розмноження для отримання вхідних сигналів, де кожний вузол розмноження команд AЗ з'єднаний з кожним із каналів формування команд керування для отримання декількох сигналів від вузла прийому і змішування команд ППЗ і AЗ та розмноження, при цьому вузол розмноження команд AЗ генерує вихідні команди AЗ на блок силового керування, якщо отриманий сигнал хоча б від двох каналів формування команд керування, кожний блок силового керування з'єднаний з пристроєм розмноження сигналів для отримання команд AЗ, де кожний блок силового керування з'єднаний з кожним із каналів формування команд керування для отримання декількох команд AЗ від кожного із пристроїв розмноження сигналів, причому кожний блок силового керування генерує сигнал AЗ, якщо отримані сигнали хоча б від двох каналів.
8. Система за п. 7, яка відрізняється тим, що лінії передачі команд керування та попереджувального захисту являють собою оптичні канали зв'язку, які включають триканальну оптичну мережу "точка-точка" з триканальним часовим резервуванням по кожному каналу, лінії проходження сигналів аварійного захисту являють собою прямі електричні триканальні зв'язки.
9. Система за п. 7, яка відрізняється тим, що структура передачі сигналів аварійного захисту до вихідних сигналів реалізована через різні субблоки трьох каналів з активним розмноженням для кожного органу регулювання та за принципом "активного поводження" при відмові.
Текст
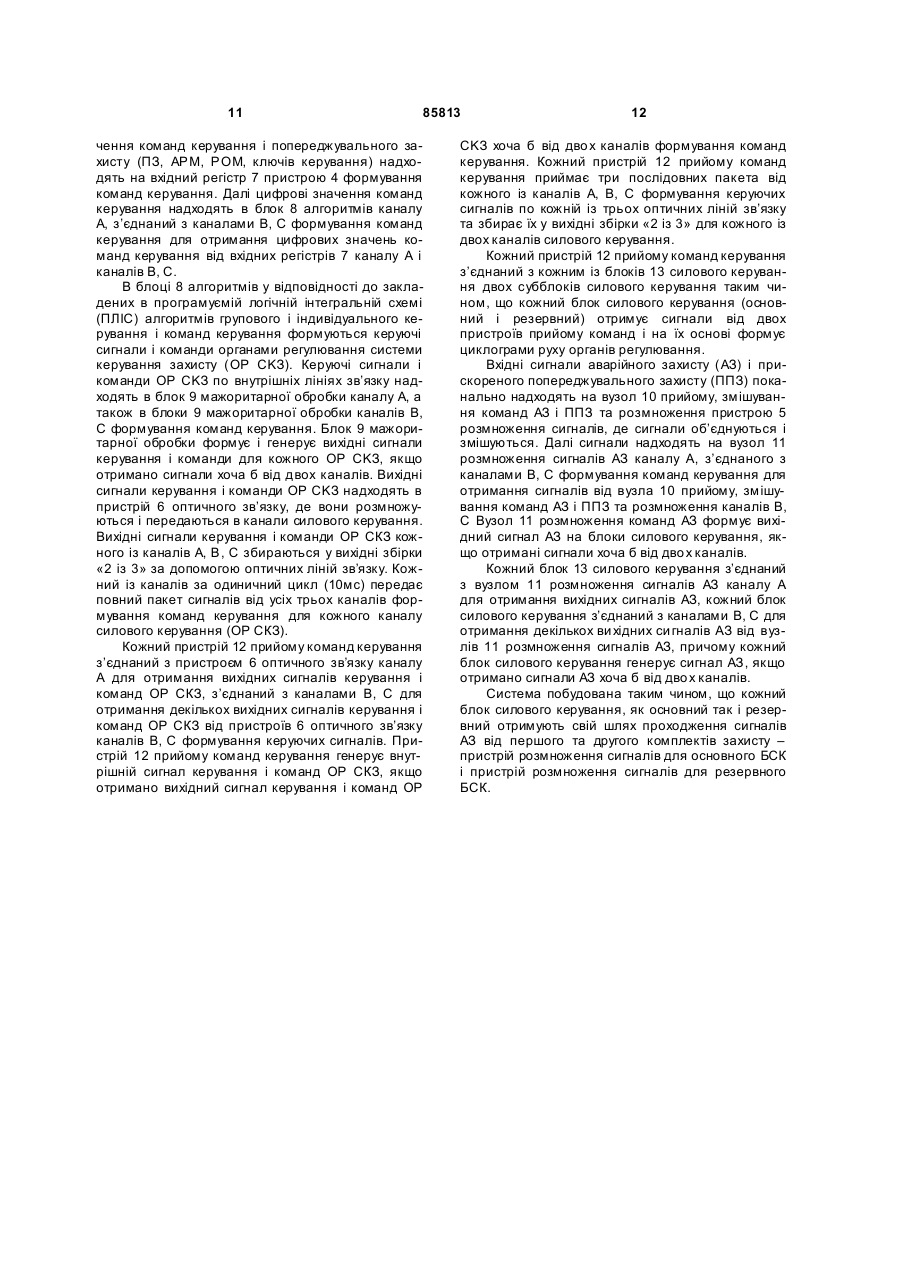
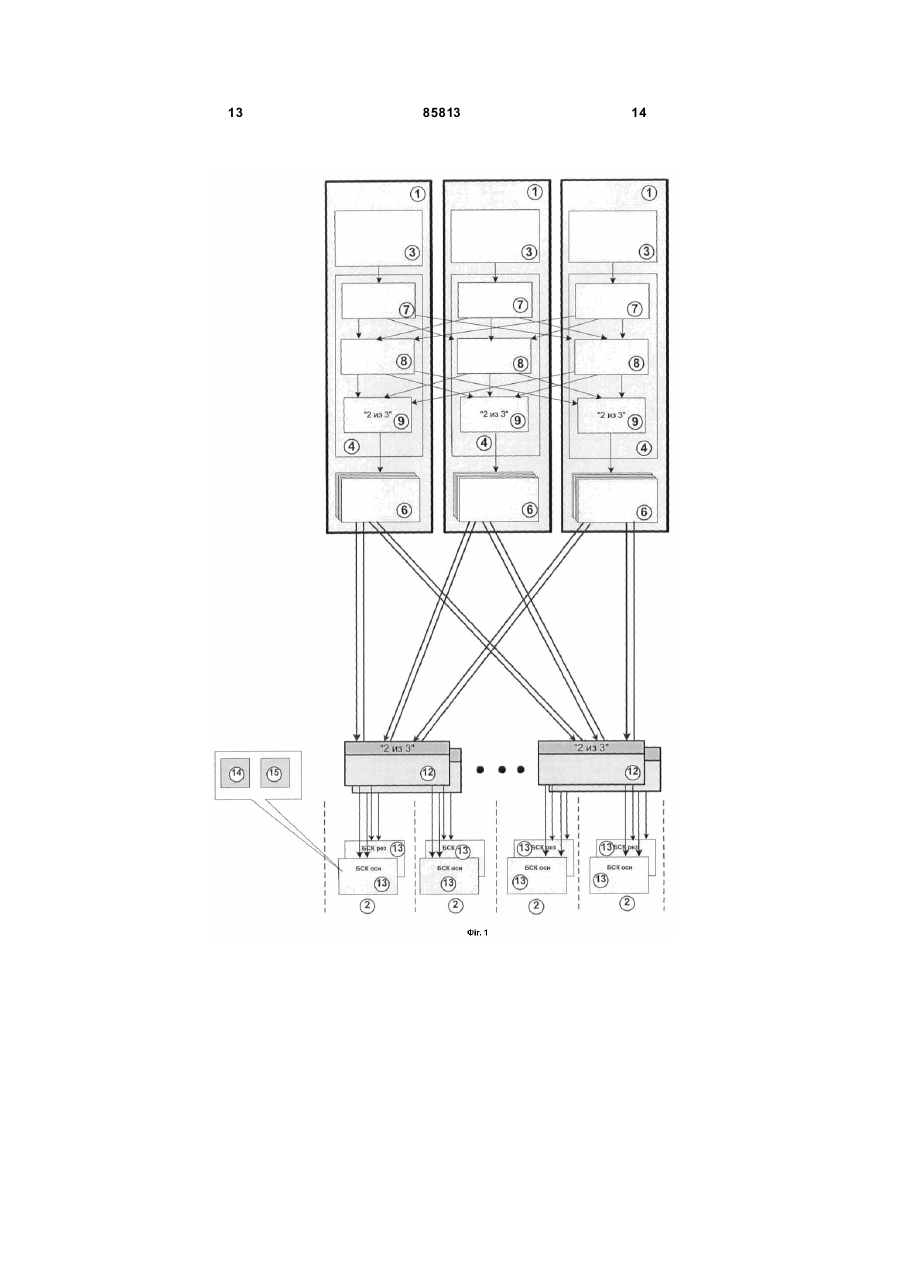
1. Система керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування, кожен з яких складається із пристрою вводу вхідних сигналів, пристрою формування команд керування, пристрою розмноження сигналів, пристрою оптичного зв'язку і множину каналів силового керування органами регулювання, кожен з яких містить блок силового керування, яка відрізняється тим, що канал силового керування додатково містить резервний блок силового керування з функціями основного блока силового керування, система додатково містить пристрій прийому команд керування, при цьому кожний блок силового керування з'єднаний з двома пристроями прийому команд керування, пристрій формування команд керування містить вхідний регістр, блок алгоритмів і мажоритарний блок, при цьому блок алгоритмів з'єднаний з вхідним регістром для отримання цифрових значень команд керування, де кожний блок алгоритмів з'єднаний з кожним каналом формування команд керування для отримання декількох цифрових значень команд керування від вхідних регістрів, мажоритарний блок з'єднаний з блоком алгоритмів, де кожний мажоритарний блок з'єднаний з кожним каналом формування команд керування для отримання декількох сигналів від блоків алгоритмів, пристрій прийому команд керування з'єднаний з каналом формування команд керування для отримання команд керування від пристроїв оптичного зв'язку, де кожний із пристроїв прийому команд керування з'єднаний з кожним каналом формування команд керування для отри 2 (19) 1 3 85813 включають триканальну оптичну мережу "точкаточка" з триканальним часовим резервуванням по кожному каналу, лінії проходження сигналів аварійного захисту являють собою прямі електричні триканальні зв'язки. 5. Система за п. 1, яка відрізняється тим, що структура передачі сигналів аварійного захисту до вихідних сигналів реалізована через різні субблоки трьох каналів з активним розмноженням для кожного органу регулювання та за принципом "активного поводження" при відмові. 4 6. Система керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування і множину каналів силового керування, кожний з яких містить блок силового керування, яка відрізняється тим, що блок силового керування містить пристрій електроніки і пристрій силових приладів. 7. Система керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування, кожний із яких включає пристрій розмноження сигналів і множину каналів силового керування, кожний із яких включає блок силового керування основний і блок силового керування резервний, яка відрізняє ться тим, що в канал формування команд керування додатково введений пристрій розмноження сигналів, до того ж пристрій розмноження сигналів містить вузол прийому та змішування команд прискореного попереджувального захисту (ППЗ) і аварійного захисту (AЗ) та розмноження, вузол розмноження команд AЗ, при цьому вузол розмноження команд AЗ з'єднаний з вузлом прийому, змішування команд ППЗ і AЗ та розмноження для отримання вхідних сигналів, де кожний вузол розмноження команд AЗ з'єднаний з кожним із каналів формування команд керування для отримання декількох сигналів від вузла прийому і змішування команд ППЗ і AЗ та розмноження, при цьому вузол розмноження команд AЗ генерує ви хідні команди AЗ на блок силового керування, якщо отриманий сигнал хоча б від двох каналів формування команд керування, кожний блок силового керування з'єднаний з пристроєм розмноження сигналів для отримання команд AЗ, де кожний блок силового керування з'єднаний з кожним із каналів формування команд керування для отримання декількох команд AЗ від кожного із пристроїв розмноження сигналів, причому кожний блок силового керування генерує сигнал AЗ, якщо отримані сигнали хоча б від дво х каналів. 8. Система за п. 7, яка відрізняється тим, що лінії передачі команд керування та попереджувального захисту являють собою оптичні канали зв'язку, які включають триканальну оптичну мережу "точкаточка" з триканальним часовим резервуванням по кожному каналу, лінії проходження сигналів аварійного захисту являють собою прямі електричні триканальні зв'язки. 9. Система за п. 7, яка відрізняється тим, що структура передачі сигналів аварійного захисту до вихідних сигналів реалізована через різні субблоки трьох каналів з активним розмноженням для кожного органу регулювання та за принципом "активного поводження" при відмові. Винахід належить до атомної енергетики, а саме до електронного обладнання систем групового та індивідуального керування органами регулювання системи керування та захисту ядерних реакторів. Відома система керування і контролю положення регулюючих органів ядерного реактора, патент РФ №1284408, МПК G21C 7/36, пул. 20.12.2005 року, яка містить два канали формування команд керування і множину каналів силового керування. Канал формування команд керування містить засоби прийому сигналів, командний блок, шифратор. Канал силового керування містить блок керування, блок силового керування, блок комутації, блоки живлення (основний та резервний), орган регулювання. Підключення або відключення кожного із блоків силового керування до приводу забезпечується швидкодіючим комутатором. Командний блок з’єднаний з блоком керування кожного каналу силового керування. Блок керування з’єднаний з блоком силового керування. Командний блок містить резистори, порогові блоки, схеми І та загальну шину. Командний блок логічно обробляє вхідні сигнали, формує та генерує вихідний сигнал команд керування шляхом вибірки 2 із R. Тракт передачі команд керування сигналів попереджувального захисту (ПЗ) реалізований шляхом дубльованої електричної мережі. Структу ра передачі сигналів аварійного захисту (AЗ) до вихідних блоків силового каналу реалізовані через різні технічні засоби з пасивним одноканальним розмноженням для кожного органа регулювання системи керування захисту. Сигнали аварійного захисту надходять до системи керування і контролю положення органів регулювання ядерного реактора на спеціальні панелі проміжних клемників, де розмножуються на пасивних елементах таким чином, що до кожного силового каналу сигнал аварійного захисту приходить окремими електричними лініями, а об’єднання команд аварійного захисту від різних комплектів аварійного захисту здійснюється в кожному силовому каналі окремо. До недоліків даної системи відносяться: низька стійкість до накладення відмов, недостатня швидкодія системи, система складна, громіздка, а головне не забезпечується належна надійність системи в цілому. Об’єднання сигналів аварійного захисту від різних комплектів AЗ, ПЗ різних комплексів на верхньому рівні приводить до порушення умов запобігання аварій і обмеження їх наслідків передбачених проектом атомної станції, які забезпечують безпеку при будь якій із врахованих проектом вихідних подій, оскільки накладення двох відмов в блоках, де виконується об’єднання сигналів або в двох каналах комп’ютерної мережі приводить до відмови в передаванні сигналу AЗ 5 85813 одразу від двох комплектів до виконавчих механізмів системи. В системі використовуються механічні лічильники на поляризованих реле в яких зберігається інформація про місце знаходження групи керування. Використання блока резервного живлення в якості ступеню резерву при несправності основного силового блока не забезпечує стійкості системи до накладення відмов. Використання двоканальної структури формування команд керування, прийому і передавання сигналів ПЗ, AЗ, прискореного попереджувального захисту (ППЗ) від систем АЗ-ПЗ, АРМ РОМ УПЗ приводить до використання додаткових пристроїв, до того ж доставляє незручності і знижує гнучкість системи, швидкодію та надійність системи в цілому. Принцип реалізації системи заснований на елементах «жорсткої» логіки на транзисторах, діодах, інтегральних схемах низького ступеню інтеграції та пасивних елементах не забезпечує простоту, компактність, економічність, а саме головне належну надійність системи. В основу винаходу покладено завдання створення системи керування і контролю положення органів регулювання ядерного реактора шляхом введення нового складу елементів та нової організації взаємозв’язків між ними, створення принципово нової структури заснованої на елементах «жорсткої» логіки та інтегральних мікросхемах середнього та високого ступеню інтеграції, використання багаторівневої мажоритарної обробки сигналів, використання інтелектуальних пристроїв високого рівня, використання багаторівневих перехресних зв’язків між окремими елементами каналів, міжканальних логічних інтерфейсних зв’язків, керуючих інтерфейсних оптичних каналів зв’язку та забезпечити високу стійкість до накладення відмов, стійкість і надійність зв’язку, надійність системи в цілому, підвищити швидкодію системи, забезпечити суміщення функцій аварійного захисту та функцій контролю і керування органами регулювання в одній системі, і в той же час відокремити аварійний захист від систем контролю і керування в каналах, шля хом використання різних субблоків обробки і проходження сигналів керування і аварійного захисту, забезпечити проходження сигналів керування кожного комплекту для виконавчих механізмів аварійного захисту мінімум по двох каналах, забезпечити цілковито автоматизоване керування органами регулювання. Поставлене завдання вирішується тим, що в системі керування і контролю положення органів регулювання ядерного реактора, що містить множину каналів формування команд керування, кожен з яких складається із пристрою вводу вхідних сигналів, пристрою формування команд керування, пристрою розмноження сигналів, пристрою оптичного зв’язку і множину каналів силового керування органами регулювання, кожен з яких містить блок силового керування, в канал силового керування додатково введено резервний блок силового керування з функціями основного блока силового керування, система додатково містить пристрій прийому команд керування, при цьому кожний блок силового керування з’єднаний з двома пристроями прийому команд керування, при 6 стрій формування команд керування містить вхідний регістр, блок алгоритмів і мажоритарний блок, при цьому блок алгоритмів з’єднаний з вхідним регістром для отримання цифрових значень команд керування, де кожний блок алгоритмів з’єднаний з кожним каналом формування команд керування для отримання декількох цифрових значень команд керування від вхідних регістрів, мажоритарний блок з’єднаний з блоком алгоритмів, де кожний мажоритарний блок з’єднаний з кожним каналом формування команд керування для отримання декількох сигналів від блоків алгоритмів, пристрій прийому команд керування з’єднаний з каналом формування команд керування для отримання команд керування від пристроїв оптичного зв’язку, де кожний із пристроїв прийому команд керування з’єднаний з кожним каналом формування команд керування для отримання декількох команд керування від пристроїв оптичного зв’язку. Блок силового керування основний і блок силового керування резервний є абсолютно автономними пристроями і підключені паралельно на блок електромагнітів приводу, при цьому відключення або зворотне підключення кожного з блоків силового керування не залежить одне від одного. В системі керування і контролю положення органів регулювання ядерного реактора вхідний регістр з’єднаний з пристроєм вводу вхідних сигналів для отримання цифрових значень команд керування, блок алгоритмів з’єднаний з вхідним регістром для отримання цифрових значень команд керування, де кожний блок алгоритмів з’єднаний з кожним каналом формування команд керування для отримання декількох цифрових значень команд керування від вхідних регістрів, при цьому блок алгоритмів логічно обробляє цифрові значення команд керування і генерує ви хідний сигнал на мажоритарний блок, мажоритарний блок з’єднаний з блоком алгоритмів для отримання команд керування від блока алгоритмів, де кожний мажоритарний блок з’єднаний з кожним із каналів формування команд керування для отримання декількох команд керування від блоків алгоритмів, при цьому мажоритарний блок формує і генерує сигнал групового і індивідуального керування (ГІК) і команд керування, якщо отримані сигнали хоча б від двох каналів, пристрій прийому команд керування з’єднаний з каналом формування команд керування для прийому команд керування від пристроїв оптичного зв’язку, де кожний пристрій прийому команд керування з’єднаний з кожним каналом формування команд керування для отримання декількох команд керування від пристроїв оптичного зв’язку, при цьому пристрій прийому команд керування формує та генерує сигнал ГІК і команд керування якщо отримано команди керування хоча б від дво х каналів формування команд керування, блок силового керування з’єднаний з двома пристроями прийому команд керування. В системі керування і контролю положення органів регулювання ядерного реактора блок силового керування містить пристрій електроніки і пристрій силових приладів. В системі керування і контролю положення органів регулювання ядерного реактора в канал формування команд 7 85813 керування додатково введено пристрій розмноження сигналів, до того ж пристрій розмноження сигналів містить вузол прийому, змішування команд прискоренного попереджувального захисту (ППЗ) і аварійного захисту (AЗ) та розмноження, вузол розмноження команд AЗ, при цьому вузол розмноження команд AЗ з’єднаний з вузлом прийому змішування команд ППЗ і AЗ та розмноження для отримання вхідних сигналів, де кожний вузол розмноження команд AЗ з’єднаний з кожним із каналів формування команд керування для отримання декількох сигналів від вузла прийому, змішування команд ППЗ і AЗ та розмноження, при цьому вузол розмноження команд A3 генерує вихідні команди AЗ на блок силового керування, якщо отримано сигнали хоча б від двох каналів формування команд керування, кожний блок силового керування з’єднаний з пристроєм розмноження сигналів для отримання команд AЗ, де кожний блок силового керування з’єднаний з кожним із каналів формування команд керування для отримання декількох команд AЗ від кожного із пристроїв розмноження сигналів, причому кожний блок силового керування генерує сигнал AЗ, якщо отримано сигнали хоча б від двох каналів. Лінії передачі команд керування та попереджувального захисту уявляють собою оптичні канали зв’язку, які включають триканальну оптичну мережу «точкаточка» з триканальним часовим резервуванням по кожному каналу, лінії проходження сигналів аварійного захисту уявляють собою прямі електричні триканальні зв’язки. Структура передачі сигналів аварійного захисту до ви хідних сигналів реалізована через різні субблоки трьох каналів з активним розмноженням для кожного органа регулювання та за принципом «активного поводження» при відмові. Система керування і контролю положення органів регулювання ядерного реактора, що пропонується відрізняється наявністю нового складу елементів, тобто має нову сук упність ознак, які забезпечують нові те хнічні властивості системи. Технічний результат - забезпечення стійкості системи до накладення відмов, підвищення швидкодії системи та надійності системи, забезпечення відокремлення аварійного захисту від систем контролю та керування органами регулювання в каналах, можливість використання при розробці нових систем та їх модернізації в майбутньому, а також модернізації вже діючих систем. Принцип побудови системи керування і контролю положення органів регулювання ядерного реактора наступний. Приймання сигналів, обробка і формування команд керування реалізовані в множині каналів формування команд керування, які цілковито автономні. Кожен із каналів обробляє усі сигнали керування, а також сигнали попереджувального захисту 11113, при цьому сигнали аварійного захисту від кожного із комплектів AЗ розмножуються на активних елементах на незалежних технічних засобах розмноження, по електричних ланцюгах надходять до кожного з блоків силового керування, де виконується їх кінцева мажоритарна обробка і об’єднання. 8 Аналіз побудови структури (паралельні шляхи проходження сигналів керування і сигналів AЗ, ПЗ) показує, що аварійний захист повинен бути відокремлений від систем контролю і керування, щоб пошкодження або вихід із ладу будь якого елемента системи контролю і керування не впливали на здатність аварійного захисту виконувати свої функції. Керуючі сигнали кожного з комплектів аварійного захисту для виконавчих механізмів AЗ передаються мінімум по трьох лініях для кожного блока силового керування (основного та резервного). Такий принцип побудови системи дозволить значно скоротити технічні засоби та відокремити захист від системи контролю та керування. В системі використовується два однакові блоки силового керування – (БСК) основний і БСК резервний з функціями основного, які абсолютно автономні і працюють паралельно на кожну із обмоток електромагніта таким чином, що пристрій комутації не потрібен. Конструктивно блок силового керування складається з двох окремих пристроїв: пристрою електроніки і пристрій силових приладів. Пристрій електроніки можна міняти під напругою, оскільки через роз’єми не комутуються електричні ланцюги. Це дає можливість заміни пристроїв силового каналу без знімання напруги, тобто можлива «гаряча» заміна. Схемотехніка силового каналу побудована таким чином, що обидва силові блоки формування циклограм (основний і резервний) однакові і живляться постійною напругою. Це дозволяє забезпечити керованість приводу при роботі не тільки від основного силового вводу змінної напруги (=144В або 250В), але і від резервного живлення (=110В), в такому режимі швидкість вводу струму нижче, проте привід повністю зберігає здатність до переміщення. Маючи однакову схемотехніку блоків силового керування і їх живлення постійним струмом в майбутньому дозволить відмовитися від силового змінного струму і перейти на постійний струм напругою 300В по основному силовому вводу, що надасть можливість: - відмовитися від механічного АВР по змінному струму; - відмовитися від підвищувальних трансформаторів; - зменшити об’єм кабельного господарства і кількості обладнання системи; - випрямлячі та розподільчі панелі силового електроживлення розмістити безпосередньо в приміщенні ГІК; - підвищити надійність силового живлення регулюючих органів. Застосування сучасної схемотехніки дозволило створити силові блоки, які здатні забезпечувати формування токових циклограм амплітудою до 50А при робочій напрузі 350В, до того ж вони мають невеликі розміри та масу. Використання принципу реалізації основаного на елементах «жорсткої» логіки на FPGA і інтегральних мікросхемах середнього та високого ступеню інтеграції дозволяє забезпечити простоту стру 9 85813 ктури, компактність і економічність, а також мати більш прозору побудову системи. Розробка логічної структури ПЛІС проводиться для кожного комплекту на основі вихідних даних, які засновані на технологічних алгоритмах системи керування об’єкта автоматизації. Застосування сучасної бази електронних компонентів дозволило зменшити масу блоків. Реалізація алгоритмів в програмуємій логічній інтегральній схемі (ПЛІС), яка дозволяє у своїй структурі за допомогою спеціальних засобів розроблення та програмування жорстко зафіксувати необхідні елементи схемотехніки для одночасної і паралельної обробки всіх необхідних алгоритмів за один цикл роботи, що дозволяє на порядок швидше виконувати різні алгоритми. Таким чином в ПЛІС для кожного із закладених алгоритмів існують свої окремі технічні засоби, у той час як в мікроконтролері всі алгоритми повинні послідовно пройти через один і той же апаратний пристрій. Використання багаторівневої структури перехресних мажоритарних зв’язків в каналах формування команд керування суттєво підвищує стійкість до накладення відмов і надійність системи. Використання мажоритарного ланцюгу в блоках силового керування істотно підвищує стійкість до накладення відмов та надійність. Побудова системи таким чином, що сигнали AЗ від кожного каналу кожного комплекту AЗ поканально надходять в усі канали формування команд керування, розмноження їх на активних елементах, проходження сигналів двома незалежними шляхами в кожному каналі, передача сигналів AЗ до кожного блоку силового керування (резервного і основного) по трьох окремих електричних лініях і остаточна мажоритарна збірка по «2 із 3» та об’єднання команд AЗ від різних комплектів аварійного захисту в кожному окремому силовому блоці, дозволяє відокремити аварійний захист від системи контролю і керування, щоб пошкодження або вихід із ладу будь якого елементу системи контролю і керування не впливали на здатність аварійного захисту виконувати свої функції, крім того керуючі сигнали кожного комплекту для виконавчих механізмів AЗ передаються по трьох каналах. Система керування і контролю положення органів регулювання ядерного реактора пояснюється кресленнями. На фігурі 1 представлена структурна схема системи керування і контролю положення органів регулювання ядерного реактора - мажоритарна обробка і передача команд керування і попереджувального захисту (ПЗ); на Фіг. 2 - мажоритарна обробка і передача команд аварійного (AЗ) та прискореного попереджувального захисту (ППЗ). На кресленнях представлена структурна схема системи керування і контролю положення органів регулювання ядерного реактора, що містить три канали формування команд керування. Система керування і контролю положення органів регулювання ядерного реактора складається із множини ідентичних каналів 1 формування команд керування, каналів 2 силового керування. Канали 1 фізично відокремлені один від одного. 10 Кожний канал 1 формування команд керування містить пристрій 3 вводу вхідних сигналів, пристрій 4 формування команд керування, пристрій 5 розмноження сигналів, пристрій 6 оптичного зв’язку. Пристрій 4 формування команд керування містить вхідний регістр 7, блок 8 алгоритмів, блок 9 мажоритарної обробки. Пристрій 5 розмноження сигналів містить вузол 10 прийому, змішування команд ППЗ і AЗ та розмноження, вузол 11 розмноження команд AЗ для блоків силового керування. Канал 2 силового керування містить пристрій 12 прийому команд керування, блоки 13 силового керування (основний і резервний), які складаються з пристрою 14 електроніки і пристрою 15 силових приладів. Система керування і контролю положення органів регулювання ядерного реактора працює наступним чином. Всі органи регулювання для спрощення керування розбиті на 10 логічних груп. Перед виводом реакторної установки на мінімально контрольований рівень всі органи регулювання піднімаються на верхній кінцевий вимикач по алгоритмах закладених в пристрої 4 формування команд керування. Групи піднімаються по черзі, починаючи з першої до десятої по наступному алгоритму: - знімається з кінцевика низу (КН) перша група і рухається угор у; - при досягненні першою групою положення 80% знімається з КН і рухається разом з першою групою друга гр упа; - органи регулювання першої групи після приходу на кінцевик верху (KB) відключається індивідуальними вимикачами. В подальшому рух груп повторюється до підйому всіх гр уп. Оп ускаються групи по наступному алгоритму: - йде донизу десята група; - при досягненні десятою групою положення в 20% знімається з KB і рухається разом з десятою групою дев’ята група; - органи регулювання десятої групи по приходу кінцевик низу (КН) відключається індивідуальними вимикачами. В подальшому рух гр уп повторюється до опускання усіх гр уп. Для визначення в кожний будь-який момент часу на органи регулювання якої групи необхідно подавати команди руху канали 4 формування команд керування безперервно приймають сигнали положення від усіх органів регулювання і на основі цієї інформації безперервно визначають головну груп у (груп у руху) та допоміжну групу (гр упа, яка знімається з кінцевика і рухається разом з головною в зонах 20% (донизу) і 80% (угору) і формує сигнали переключення головної групи при досягненні його KB або КН. Алгоритми «зашиті» в ПЛІС і можуть бути змінені. Вхідні сигнали зовнішніх команд керування і захисту від ПТК AЗ -ПЗ, ПТК АРМ - РОМ - УПЗ, ключів керування БЩК, каналів контролю положення поканально надходять у пристрій 3 вводу вхідних сигналів. Пристрій 3 вводу вхідних сигналів приймає безперервно дискретні вхідні сигнали, які перетворює в ци фрову форму. Ци фрові зна 11 85813 чення команд керування і попереджувального захисту (ПЗ, АРМ, РОМ, ключів керування) надходять на вхідний регістр 7 пристрою 4 формування команд керування. Далі цифрові значення команд керування надходять в блок 8 алгоритмів каналу А, з’єднаний з каналами В, С формування команд керування для отримання цифрових значень команд керування від вхідних регістрів 7 каналу А і каналів В, С. В блоці 8 алгоритмів у відповідності до закладених в програмуємій логічній інтегральній схемі (ПЛІС) алгоритмів групового і індивідуального керування і команд керування формуються керуючі сигнали і команди органами регулювання системи керування захисту (OP CKЗ). Керуючі сигнали і команди OP CKЗ по внутрішніх лініях зв’язку надходять в блок 9 мажоритарної обробки каналу А, а також в блоки 9 мажоритарної обробки каналів В, С формування команд керування. Блок 9 мажоритарної обробки формує і генерує вихідні сигнали керування і команди для кожного OP CKЗ, якщо отримано сигнали хоча б від двох каналів. Вихідні сигнали керування і команди OP CKЗ надходять в пристрій 6 оптичного зв’язку, де вони розмножуються і передаються в канали силового керування. Вихідні сигнали керування і команди ОР СКЗ кожного із каналів А, В, С збираються у вихідні збірки «2 із 3» за допомогою оптичних ліній зв’язку. Кожний із каналів за одиничний цикл (10мс) передає повний пакет сигналів від усіх трьох каналів формування команд керування для кожного каналу силового керування (ОР СКЗ). Кожний пристрій 12 прийому команд керування з’єднаний з пристроєм 6 оптичного зв’язку каналу А для отримання вихідних сигналів керування і команд ОР СКЗ, з’єднаний з каналами В, С для отримання декількох вихідних сигналів керування і команд ОР СКЗ від пристроїв 6 оптичного зв’язку каналів В, С формування керуючих сигналів. Пристрій 12 прийому команд керування генерує внутрішній сигнал керування і команд ОР СКЗ, якщо отримано вихідний сигнал керування і команд OP 12 CKЗ хоча б від дво х каналів формування команд керування. Кожний пристрій 12 прийому команд керування приймає три послідовних пакета від кожного із каналів А, В, С формування керуючих сигналів по кожній із трьох оптичних ліній зв’язку та збирає їх у вихідні збірки «2 із 3» для кожного із двох каналів силового керування. Кожний пристрій 12 прийому команд керування з’єднаний з кожним із блоків 13 силового керування двох субблоків силового керування таким чином, що кожний блок силового керування (основний і резервний) отримує сигнали від двох пристроїв прийому команд і на їх основі формує циклограми руху органів регулювання. Вхідні сигнали аварійного захисту (AЗ) і прискореного попереджувального захисту (ППЗ) поканально надходять на вузол 10 прийому, змішування команд AЗ і ППЗ та розмноження пристрою 5 розмноження сигналів, де сигнали об’єднуються і змішуються. Далі сигнали надходять на вузол 11 розмноження сигналів AЗ каналу А, з’єднаного з каналами В, С формування команд керування для отримання сигналів від вузла 10 прийому, змішування команд AЗ і ППЗ та розмноження каналів В, С Вузол 11 розмноження команд AЗ формує вихідний сигнал AЗ на блоки силового керування, якщо отримані сигнали хоча б від дво х каналів. Кожний блок 13 силового керування з’єднаний з вузлом 11 розмноження сигналів AЗ каналу А для отримання вихідних сигналів AЗ, кожний блок силового керування з’єднаний з каналами В, С для отримання декількох ви хідних си гналів AЗ від вузлів 11 розмноження сигналів AЗ, причому кожний блок силового керування генерує сигнал AЗ, якщо отримано сигнали AЗ хоча б від дво х каналів. Система побудована таким чином, що кожний блок силового керування, як основний так і резервний отримують свій шлях проходження сигналів AЗ від першого та другого комплектів захисту – пристрій розмноження сигналів для основного БСК і пристрій розмноження сигналів для резервного БСК. 13 85813 14 15 Комп’ютерна в ерстка Д. Шев ерун 85813 Підписне 16 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for control and check of position of control devices of nuclear reactor
Автори англійськоюBakhmach Yevhenii Stepanovych
Назва патенту російськоюСистема управления и контроля положения органов регулировки ядерного реактора
Автори російськоюБахмач Евгений Степанович
МПК / Мітки
МПК: G21C 7/00, G21C 17/00
Мітки: реактора, положення, керування, регулювання, органів, контролю, ядерного, система
Код посилання
<a href="https://ua.patents.su/8-85813-sistema-keruvannya-i-kontrolyu-polozhennya-organiv-regulyuvannya-yadernogo-reaktora.html" target="_blank" rel="follow" title="База патентів України">Система керування і контролю положення органів регулювання ядерного реактора</a>
Ядерний реактор, активна зона ядерного реактора, спосіб управління активною зоною ядерного реактора, осередок “ядро-оболонка” паливних елементів ядерного реактора
Номер патенту: 42847
Опубліковано: 15.11.2001
Автор: Радковскі Елвін
Мітки: ядерного, управління, зоною, осередок, зона, спосіб, реактор, паливних, активна, елементів, реактора, ядерний, активною, ядро-оболонка
Формула / Реферат:
1. Ядерний реактор, що включає активну зону з великою кількістю осередків "ядро-оболонка", причому кожен з осередків "ядро-оболонка" має центральну зону ядра, яка містить паливні елементи ядра, виготовлені зі здатного до ядерного розпаду матеріалу, що включає U-235, U-238, та сповільнювач, і кільцеподібну зону оболонки, яка оточує зону ядра і містить паливні елементи оболонки, які включають торій і збагачений уран або їх...
Спосіб діагностики іонізаційної камери системи керування і захисту ядерного реактора
Номер патенту: 27474
Опубліковано: 25.10.2007
Автор: Очеретній Костянтин Валерійович
МПК: H01J 47/00, G01T 3/00
Мітки: захисту, камери, діагностики, іонізаційної, ядерного, керування, системі, реактора, спосіб
Формула / Реферат:
Спосіб діагностики іонізаційної камери системи керування і захисту ядерного реактора, що включає отримання і аналіз форми вольт-амперної характеристики камери, який відрізняється тим, що в ланцюзі іонізаційної камери, представленої у вигляді нелінійного двополюсника, задають один стрибок по напрузі і, реєструючи змінні стани ланцюга під час перехідного процесу, відновлюють по них вольт-амперну характеристику камери, а діагноз ставлять за...
Іонізаційна камера системи керування і захисту ядерного реактора
Номер патенту: 27475
Опубліковано: 25.10.2007
Автор: Очеретній Костянтин Валерійович
МПК: H01J 47/00, G01T 3/00
Мітки: камера, системі, ядерного, захисту, реактора, керування, іонізаційна
Формула / Реферат:
1. Іонізаційна камера системи керування і захисту ядерного реактора, що виконана з електродними системами в корпусі, має один або декілька герметичних об'ємів з відкачувальними трубками і електричними виводами від кожного електрода електродних систем, яка відрізняється тим, що корпус іонізаційної камери утворений коаксіальними трубами, що з'єднані по торцях кільцевими фланцями, в які встановлені відкачувальні трубки і електричні виводи, а...
Іонізаційна камера системи керування та захисту ядерного реактора
Номер патенту: 12317
Опубліковано: 16.01.2006
Автор: Новіков Ростислав Володимирович
МПК: G01T 1/185, H01J 47/00
Мітки: керування, реактора, ядерного, захисту, іонізаційна, системі, камера
Формула / Реферат:
1. Іонізаційна камера (ІК) для системи керування та захисту ядерного реактора, з електродними системами у корпусі, який має один або декілька герметичних об'ємів з відкачувальними трубками і електричними виводами від кожного електрода електродних систем, яка відрізняється тим, що корпус іонізаційної камери утворений коаксіальними трубами, з'єднаними по торцях кільцевими фланцями, в які встановлені відкачувальні трубки і електричні виводи, а...
Система пасивного аварійного охолодження корпуса ядерного реактора
Номер патенту: 1375
Опубліковано: 15.08.2002
Автори: Ніщик Олександр Павлович, Гершуні Олександр Наумович, Письменний Євген Миколайович
МПК: G21C 15/00, G21C 15/18
Мітки: пасивного, ядерного, система, реактора, корпуса, охолодження, аварійного
Формула / Реферат:
1. Система пасивного аварійного охолодження корпуса ядерного реактора, що містить корпус реактора з активною зоною і бетоном біологічного захисту та гідроакумулятори, яка відрізняється тим, що корпус реактора із зовнішньої сторони оснащено пакетом теплових труб, випаровувальні ділянки яких охоплюють дно та бокову поверхню корпуса реактора до рівня, не нижче верхнього рівня розташування активної зони, а конденсаційні їх ділянки виведено крізь...
Попередній патент: Ацетати 16-ариліденпохідних андрост-5-ен-3b-ол-17-ону та хірально-нематична рідкокристалічна суміш
Наступний патент: Енергетична установка
Випадковий патент: Агрегатні вальці