Плавниковий рушійний пристрій

Формула / Реферат
1. Рушійний пристрій, встановлений всередині корпусу (1) морського судна, який містить щонайменше один плавник (2), що поступально переміщується в поперечному напрямі, прикріплений до вала (6) плавника засіб для приводу вказаного плавника (2), який містить колінчастий вал (9), механізм коливань відносно поперечної осі для повороту вказаного плавника (2) навколо осі вказаного вала (6) плавника і механізм переміщення у вертикальній площині для поступального переміщення вказаного плавника (2) в по суті поперечному напрямі відносно вказаної осі вказаного вала (6) плавника і вказаного судна, причому вказаний колінчастий вал (9) приводить в рух вказаний механізм коливань відносно поперечної осі і вказаний механізм переміщення у вертикальній площині, який відрізняється тим, що і вказаний механізм переміщення у вертикальній площині, і вказаний механізм коливань відносно поперечної осі з'єднані з одним коліном (10) на вказаному колінчастому валу (9) або з двома окремими колінами, що мають по суті однаковий радіус і кутове положення відносно осі (13) обертання вказаного колінчастого вала (9).
2. Рушійний пристрій за п. 1, який відрізняється тим, що вказаний вал (6) плавника закріплений на каретці (5), що дозволяє повертати вказаний вал (6) плавника і, внаслідок цього, вказаний плавник (2) навколо своєї осі відносно вказаної каретки (5), і тим, що вказана каретка (5) рухомо закріплена відносно вказаного колінчастого вала (9), причому вказаний механізм переміщення у вертикальній площині з'єднує вказану каретку (5) з коліном (10) на вказаному колінчастому валу (9), а вказаний механізм коливань відносно поперечної осі з'єднує вказаний вал (6) плавника з коліном (10) на вказаному колінчастому валу (9).
3. Рушійний пристрій за п. 2, який відрізняється тим, що вказаний механізм переміщення у вертикальній площині і вказаний механізм коливань відносно поперечної осі забезпечені за допомогою загальної тяги (15), (18) керування, з'єднаної на одному кінці з вказаним коліном (10) привідного вала, а на іншому кінці прикріпленої до, і продовжуваної в по суті поперечному напрямі з вала (20) коливань плавника, з'єднаного з можливістю повороту з вказаною кареткою (5), так що вказана тяга (15), (18) керування, при повороті вказаного колінчастого вала (9), змушує каретку (5) здійснювати коливальні рухи або переміщуватися поступально до і від вказаного колінчастого вала (9) і одночасно змушує повертати вказаний вал (20) коливань плавника.
4. Рушійний пристрій за п. 2, який відрізняється тим, що вказаний механізм переміщення у вертикальній площині містить паз (21) у вказаній каретці (5) і коліно (10) на вказаному колінчастому валу (9), рухомо розташоване у вказаному пазу (21), причому вказаний механізм коливань відносно поперечної осі містить гойдаючу тягу (18), прикріплену одним кінцем до, і продовжувану по суті в поперечному напрямі з вказаного вала (20) коливань плавника і прикріплену на іншому її кінці до коліна (10) на вказаному колінчастому валу (9), причому вказана гойдаюча тяга (18) є телескопічною або з'єднана або з вказаним валом (20) коливань плавника, або з вказаним коліном за допомогою пересувної втулки (19), так що вказана гойдаюча тяга (18) компенсує зміну розмірів між вказаним валом (6) плавника і вказаним коліном (10), і тому, коли вказаний колінчастий вал (9) повертають, вказаний механізм переміщення у вертикальній площині змушує каретку (5) здійснювати коливальні рухи або рухатися поступально до і від вказаного колінчастого вала (9), і одночасно вказаний механізм коливань відносно поперечної осі змушує повертатися вказаний вал (20) коливань плавника.
5. Рушійний пристрій за п. 3 або 4, який відрізняється тим, що вказаний вал (20) коливань плавника і вал (6) є одним і тим же.
6. Рушійний пристрій за п. 3 або 4, який відрізняється тим, що вказаний механізм коливань відносно поперечної осі містить синхронізуючу ланку або зачеплення (22), що з'єднує вказаний вал (20) коливань плавника з вказаним валом (6), і де вказана синхронізуюча ланка (22) розташована для синхронізації повороту вказаного вала (6) плавника з поворотомвказаного вала (20) коливань плавника.
7. Рушійний пристрій за п. 2 або 4, який відрізняється тим, що вказаний пристрій містить засіб для регулювання кута між вказаним валом (20) коливань плавника і вказаною тягою (15), (18) керування або вказаною гойдаючою тягою (15), (18).
8. Рушійний пристрій за п. 6, який відрізняється тим, що вказаний вал (6) плавника паралельний вказаному валу (20) коливань плавника.
9. Рушійний пристрій за п. 6, який відрізняється тим, що зачеплення розташоване між вказаним валом (6) плавника і вказаним валом (20) коливань плавника, так що вказаний вал (6) плавника розташований під відмінним від нуля кутом до вказаного вала (20) коливань плавника.
10. Рушійний пристрій за п. 6, який відрізняється тим, що вказаний пристрій містить два або більше плавників (6), з'єднаних з вказаним тим же валом (20) коливання плавника за допомогою однієї або більше синхронізуючих ланок (22).
11. Спосіб просування корабля за допомогою рушійного пристрою по одному з попередніх пунктів, в якому вказаний механізм переміщення у вертикальній площині і вказаний механізм коливань відносно поперечної осі з'єднані з одним коліном (10) вказаного колінчастого вала (9) або двома окремими колінами, що мають по суті однаковий радіус і кутове положення відносно осі обертання (13) вказаного колінчастого вала (9).
Текст
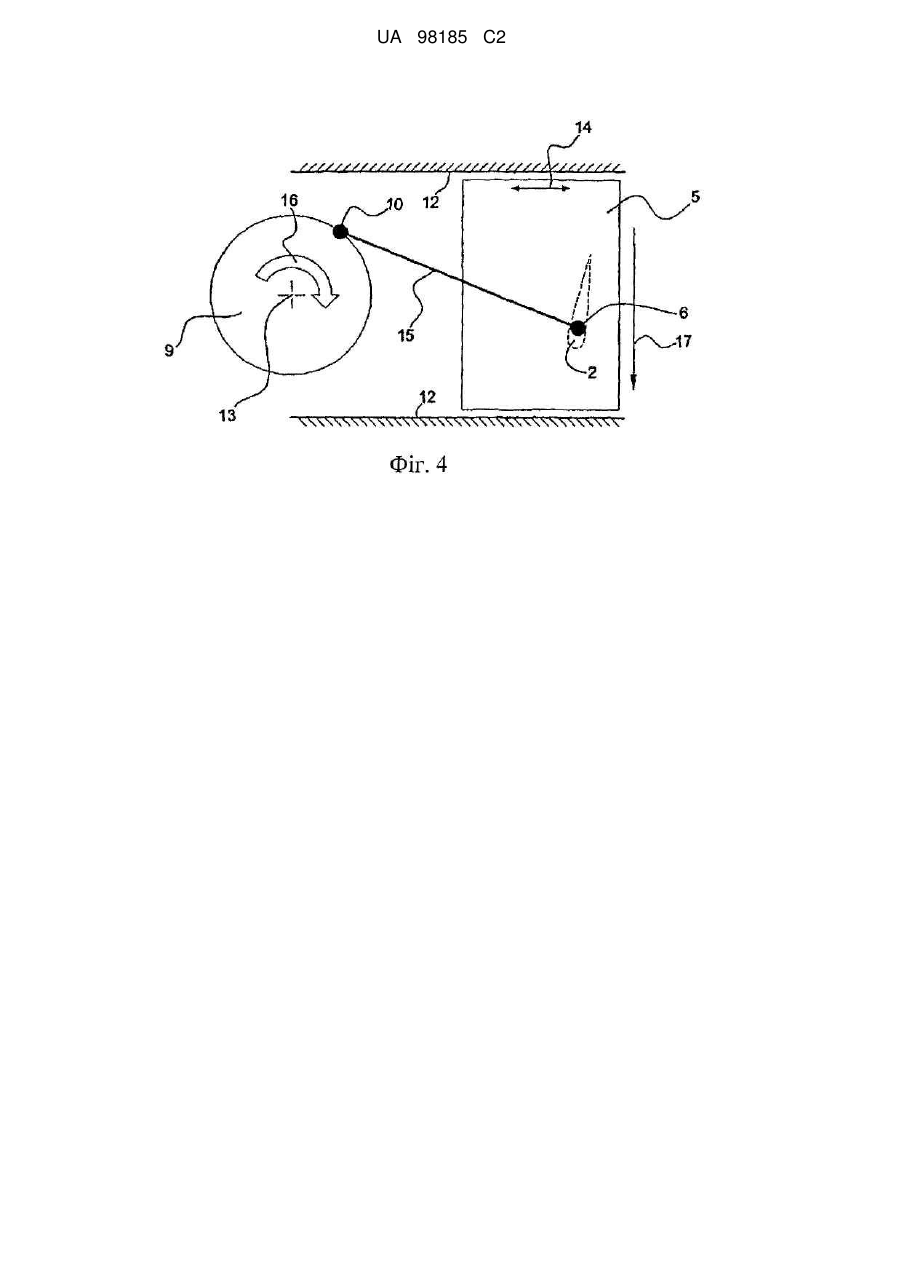
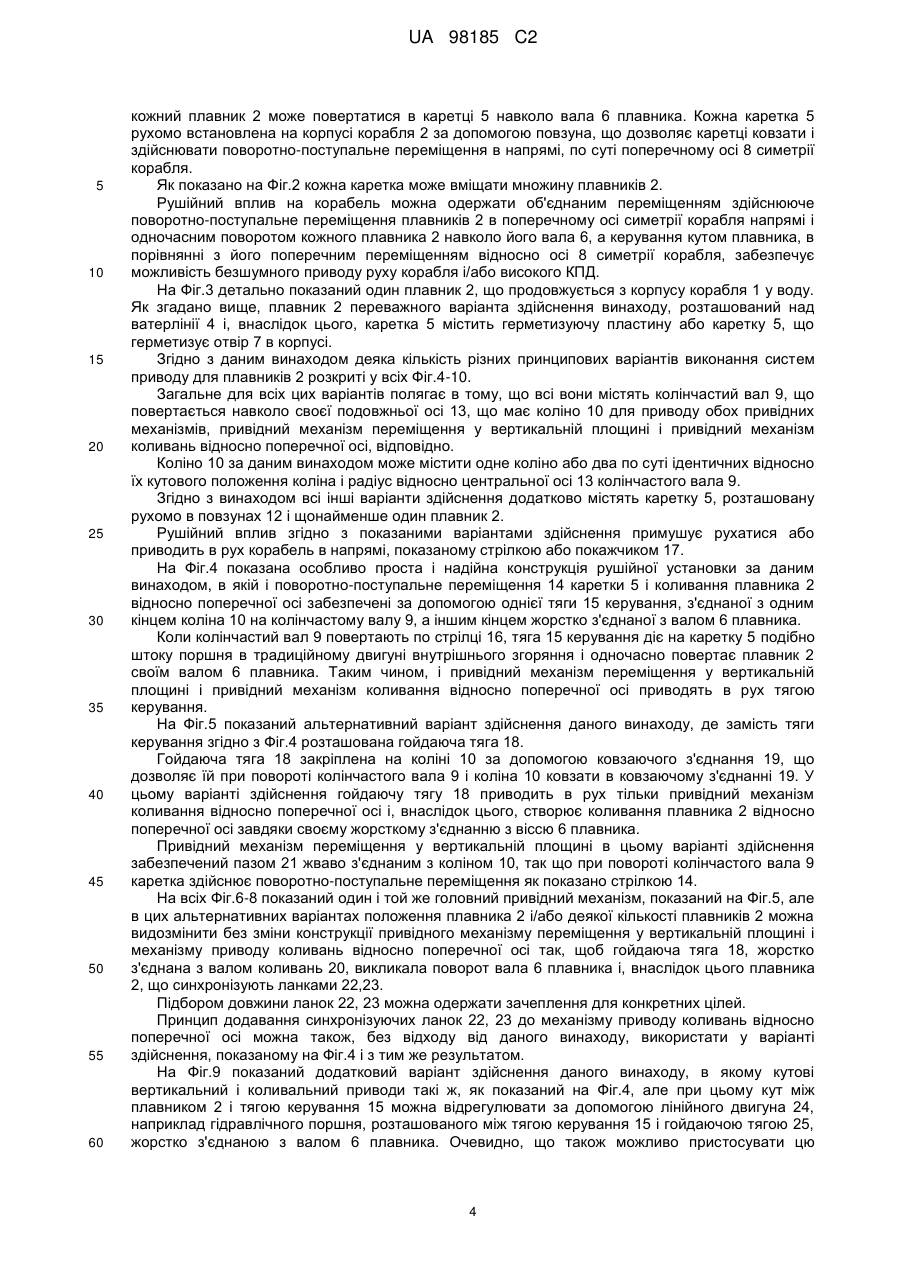
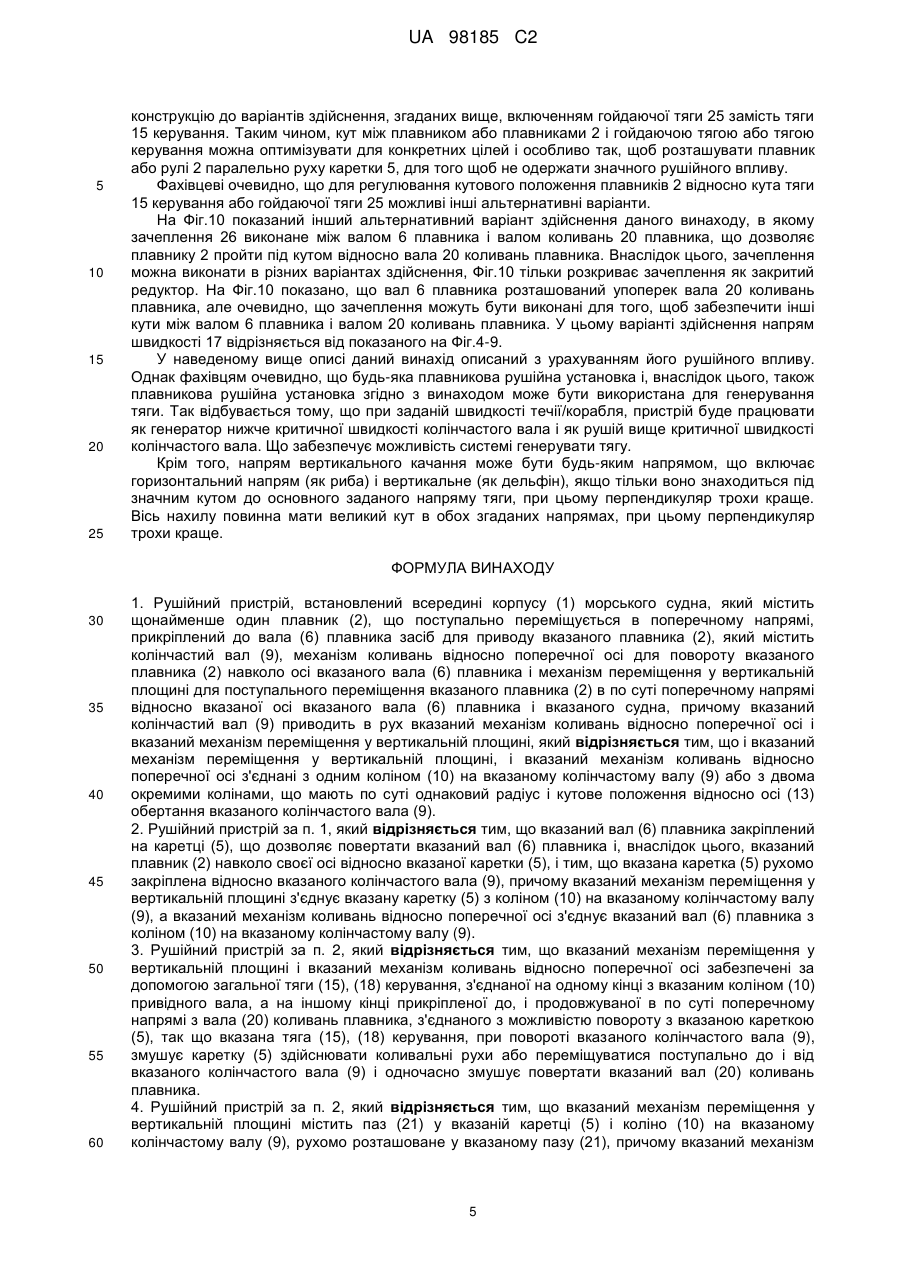
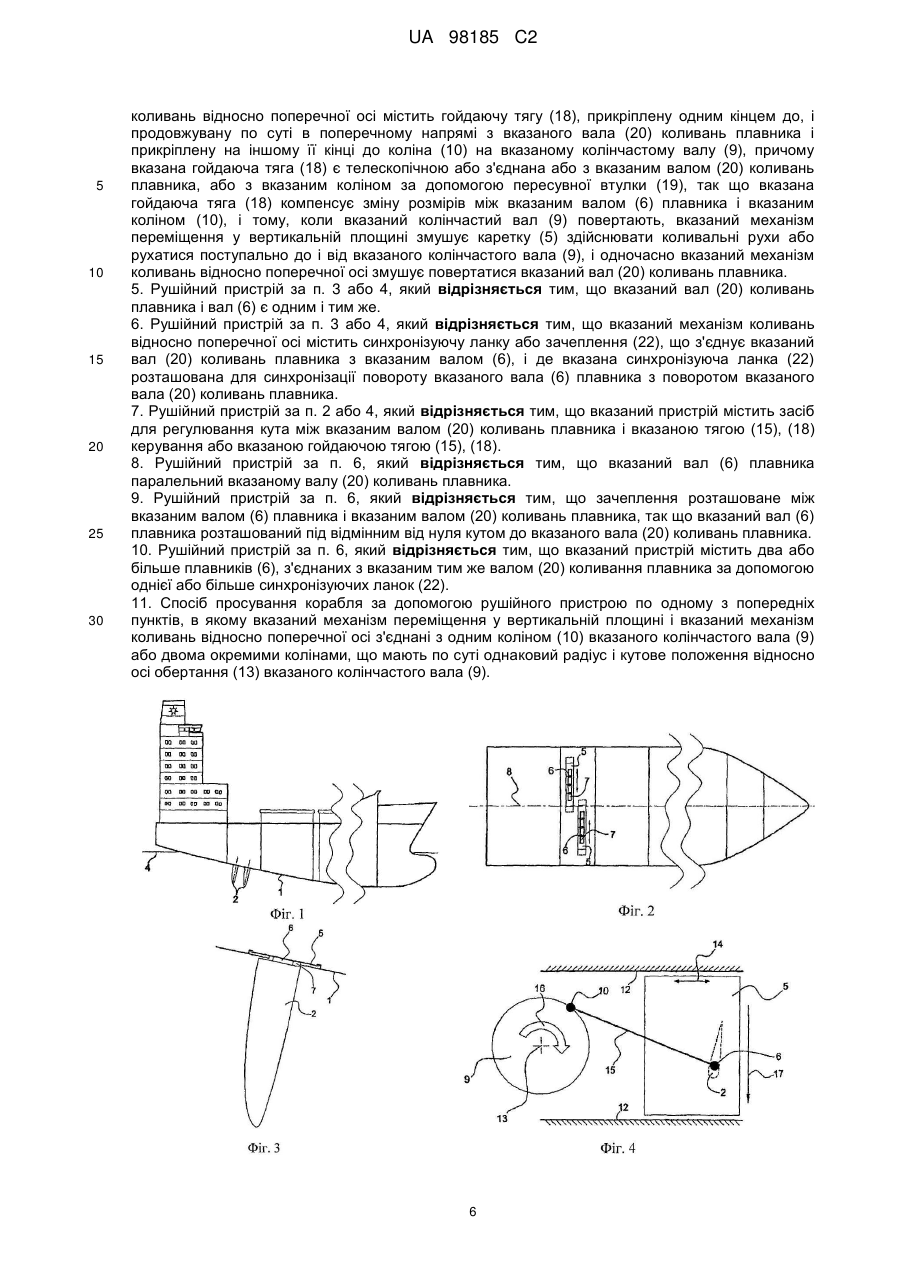
Реферат: Запропонований рушійний пристрій для приведения в рух в текучому середовищі, що містить щонайменше один плавниковий рушій, прикріплений до вала плавника, і засіб для приводу плавникового рушія, що містить колінчастий вал, механізм коливань відносно поперечної осі для повороту плавникового рушія навколо осі вказаного вала плавника і механізм переміщення у вертикальній площині для поступального переміщення плавникового рушія в по суті поперечному відносно осі вала плавника напрямі, при цьому колінчастий вал приводить в рух механізм коливань відносно поперечної осі і механізм переміщення у вертикальній площині. Проста, надійна і ефективна конструкція одержана установкою обох механізмів і механізму переміщення у вертикальній площині і механізму коливань відносно поперечної осі на одне коліно на колінчастому валу або окремі коліна, що мають по суті такий же радіус і кутове положення відносно осі обертання колінчастого вала. UA 98185 C2 (12) UA 98185 C2 UA 98185 C2 5 10 15 20 25 30 35 40 45 50 55 60 Галузь техніки, до якої належить винахід Даний винахід стосується рушійної установки для морського судна, в якій засіб, що застосовується для приведення в рух, включає в себе підводні крила або рулі, які машуть або коливальні. Згідно з одним аспектом даний винахід стосується рушійного пристрою, забезпеченого всередині корпусу морського судна. Пристрій містить щонайменше один поперечний висувний плавник рушія, встановлений на валу плавника. Засіб для приводу плавника містить колінчастий вал, механізм коливань відносно поперечної осі для повороту плавника навколо осі вала плавника і механізм переміщення у вертикальній площині для переміщення плавника в, по суті, поперечному відносно осі вала плавника і судна напрямі. Попередній рівень техніки Рушійні установки використовують багато років, особливо для руху морських суден, і більшість рушійних установок, що використовуються сьогодні являють собою рушій з весловим обертовим гвинтом. Навіть якщо рушійна система з весловим обертовим гвинтом забезпечує дуже надійну і просту конструкцію, однак, в нормальних умовах вона не забезпечує дуже високий КПД і тому, пропонувалися альтернативні рушійні установки з метою подолання цих недоліків. Механізми типу, згаданого у вступі, пропонувалися як альтернатива рушійній установці з весловим обертовим гвинтом для одержання різних переваг, таких як збільшена ефективність і знижений шум. Патент US 5401196 (TRIANTAFYLLOU) зокрема розкриває таку рушійну установку, в якій розташовані один або більше плавникових рушіїв, якими маніпулюють, щоб забезпечити рух у вибраному напрямі ходу. Плавником маніпулюють за допомогою спільного використання механізму переміщення у вертикальній площині і механізму коливань відносно поперечної осі, при цьому механізм переміщення у вертикальній площині генерує коливання плавникового рушія в напрямі по суті поперечному вибраному, а механізм коливань відносно поперечної осі проводить маховий рух плавника відносно шарніра для зміни його кута діферента відносно того ж напряму ходу. Згідно з патентом US 5401196 (TRIANTAFYLLOU) значне збільшення тягового КПД можна одержати, використовуючи цю установку відносно забезпечених традиційними рушійними установками з весловим обертовим гвинтом. Такий збільшений КПД забезпечується оптимізацією об'єднаного переміщення механізму переміщення у вертикальній площині і механізму коливань відносно поперечної осі, так що плавниками маніпулюють, щоб вони переміщувалися по схемі дуже схожій на переміщення плавника риби. Якщо навіть плавникові рушійні пристрої, подібні запропонованим патентом US 5401196 (TRIANTAFYLLOU) пропонуються для значного збільшення КПД, такі установки не мають широкого комерційного застосування для приведення в рух, наприклад завдяки складності механізму плавникового рушія, і особливо для приведення в рух морських суден. Отже, потреба в додатковому розвитку таких плавникових рушійних установок зберігається. У FR 1330218 A (BOUIGES) описується водний велосипед, що приводиться в рух за допомогою поступально переміщуваних плавників, де механізм поступального переміщення або переміщення у вертикальній площині, включаючий в себе механізм коливань відносно поперечної осі, закріплені на одному колінчастому кривошипі. Цей механізм, працюючий в обмеженій симетрії, схильний до впливу навколишнього середовища і, додатково, механізм частково навантажений нижче ватерлінії. У DE 2849027 A1 (KRAUS HELMUT) описується універсальний плавниковий привідний механізм, діючийза допомогою плавника, розташованого або горизонтально або вертикально. У DE 102004004236 A1 (KLUDSZUWEIT ALFRED) описується рушійна установка для човна, що містить каркас, коливальну лопать, що має два паралельних подовжніх елемента, паралельних осі човна. Лопаті переміщуються в подовжньому напрямі і не співпадають по фазі, а їх кінці з'єднані сережкою, що гойдається. Передня сережка має важіль, який може бути з'єднаний з двигуном, а задня сережка паралельних подовжніх елементів з'єднана з весловою лопаткою проміжною ланкою. Проміжна ланка і веслова лопатка можуть бути гнучкими або може бути передбачений шарнір з пружиною, що дозволяє переміщувати проміжну сережку по куту. WO 03/026954 A1, опублікований 3 квітня 2003 (Inocean) пропонує установку, що використовує синусоїдальну схему переміщення для приведення в рух або рекуперації енергії. Установка містить множину жорстких елементів корпусу судна, розташованих в ряд і закріплених з можливістю повертання один до одного для повороту відносно паралельних осей 1 UA 98185 C2 5 10 15 20 25 30 35 40 45 50 55 60 обертання упоперек подовжнього розміру ряду елементів корпусу судна. Установка додатково містить переміщуючі пристрої для повороту елементів корпусу судна відносно один одного або переміщуючі пристрої для рекуперації енергії внаслідок повороту елементів корпусу судна відносно один одного. WO 2006/038808 А1, опублікований 13 квітня 2006 (Clavis Biopropulsion) пропонує пристрій, що містить щонайменше один плавник, поступально переміщуваний в поперечному напрямі. Пристрій містить в собі запускаючий і привідний засіб, що дозволяє по суті вільне коливальне рушення плавника. Пристрій запускається за допомогою імпульсу, утвореного привідним засобом, кожний з такої множини циклів і пружин використовують для збереження пульсуючої енергії, забезпеченої привідним засобом. Задача даного винаходу полягає в тому, щоб забезпечити надійну і просту по своїй конструкції рушійну установку і одночасно забезпечити варіант оптимізації установки, щоб одержати більш високий КПД, ніж це можливо у традиційних двигунів з весловими гвинтами. Згідно з даним винаходом пропонується рушійна установка, що забезпечує приведення в рух в текучому середовищі і, особливо, для приведення в рух морського судна. Рушійна установка містить щонайменше один плавниковий рушій і засіб для приводу плавникового рушія. Засіб для приводу плавникового рушія містить колінчастий вал, механізм коливань відносно поперечної осі для повороту плавникового рушія навколо осі вала плавника і механізм переміщення у вертикальній площині для поступального переміщення плавникового рушія в по суті поперечному напрямі відносно подовжньої осі судна, і в по суті поперечному відносно осі вала плавника напрямі, причому колінчастий вал приводить в рух і механізм коливань відносно поперечної осі і механізм переміщення у вертикальній площині. Як механізмом переміщення у вертикальній площині, так і механізмом коливань відносно поперечної осі керують за допомогою колінчастого вала, з'єднаного з механізмом переміщення у вертикальній площині і механізмом коливань відносно поперечної осі одним коліном на колінчастому валу або окремим коліном, що мають по суті такий же радіус і кутове положення відносно осі обертання колінчастого вала. Внаслідок цього, оскільки і механізм переміщення у вертикальній площині і механізм коливань відносно поперечної осі з'єднані з одним і тим же, або по суті ідентичним коліном або колінчастим валом, даний винахід забезпечує дуже просту конструкцію об'єднаного механізму переміщення у вертикальній площині і механізму коливань відносно поперечної осі і забезпечує, з одного боку, варіант конструкції, що має відносно невелику кількість компонентів, а з іншого боку, варіант оптимізації рушійної установки для роботи з більш високим КПД, ніж той, що забезпечений традиційною рушійною установкою з весловим гвинтом, завдяки її відносно симетричній схемі переміщення. У переважному варіанті здійснення плавниковий рушій закріплений на каретці за допомогою вала плавника, дозволяючи валу плавника і плавнику повертатися навколо своєї осі відносно каретки. Каретка закріплена рухомо відносно колінчастого вала, так що вона може коливатися в напрямі до і від колінчастого вала. Механізм переміщення у вертикальній площині з'єднує каретку з коліном колінчастого вала, а механізм коливань відносно поперечної осі з'єднує вал плавника з коліном колінчастого вала. Винахід особливо переважний, якщо і механізм переміщення у вертикальній площині і механізм коливань відносно поперечної осі забезпечені, за допомогою загальної тяги керування, з'єднанням на одному кінці з коліном привідного вала, а на іншому кінці жорстко прикріплені і продовжуються по суті упоперек вала коливань плавника, з'єднаного з кареткою з можливістю повертання, так що тяга керування при повороті колінчастого вала змушує каретку здійснювати коливальні рухи до і від колінчастого вала і в той же час змушує повертати вал коливань плавника. Таким чином, кількість окремих компонентів знижена до тільки дуже невеликої кількості. У альтернативному варіанті здійснення механізм переміщення у вертикальній площині містить паз в каретці і коліно на колінчастому валу, рухомо розташоване в пазу, а механізм коливань відносно поперечної осі містить гойдаючу тягу, з'єднану на одному кінці з валом плавника в по суті поперечному осі вала плавника напрямі, а іншим своїм кінцем прикріплену до коліна на колінчастому валу, причому гойдаюча тяга є телескопічною або з'єднана з валом коливань плавника або коліном за допомогою ковзаючої втулки, так що гойдаюча тяга компенсує змінні розміри між валом плавника і коліном і, таким чином, коли колінчастий вал повертають, механізм переміщення у вертикальній площині змушує каретку здійснювати коливальні рухи до і від колінчастого вала і одночасно механізм коливань відносно поперечної осі змушує вал коливань плавника здійснювати коливальні рухи. Таким чином, сили, що 2 UA 98185 C2 5 10 15 20 25 30 35 40 45 50 55 60 викликають переміщення у вертикальній площині, що передаються плавникам, насамперед передаються механізмом переміщення у вертикальній площині механізмом, а сили, що викликають коливання відносно поперечної осі, передаються механізмом коливань відносно поперечної осі. При дуже малих силах, що викликають коливання відносно поперечної осі відносно сил, що викликають переміщення у вертикальній площині забезпечується можливість більш легкої конструкції механізму коливань відносно поперечної осі. У додатковому варіанті здійснення вал коливань плавника і вал плавника є одним і тим же, забезпечуючи дуже просту конструкцію, що містить відносно невелику кількість окремих компонентів. У переважному і альтернативному варіанті здійснення механізм коливань відносно поперечної осі містить синхронізуючу ланку, що з'єднує вал коливань плавника з валом плавника, причому вказана синхронізуюча ланка служить для синхронізації повороту вала плавника з поворотом вала коливань плавника. Це дає можливість з'єднати більше плавників з одним і тим же валом коливань плавника і механізмом коливань відносно поперечної осі, а також забезпечує більше свободи, для адаптації положення плавників до спеціальних потреб, наприклад адаптація розміщення конструкції в обмеженому просторі корпусу морського судна. Тяга керування або гойдаюча тяга, згадана вище, може бути жорстко з'єднана з валом коливань плавника, але в переважному варіанті здійснення з'єднання між тягою керування або гойдаючою тягою і валом коливань плавника містить засіб регулювання кута між валом коливань плавника і тягою керування або гойдаючою тягою. Таким чином, забезпечують простий спосіб регулювання кута плавника для конкретних потреб, таких як зміна необхідного напряму тяги у випадку повороту. У дуже простому і отже переважному варіанті здійснення вал плавника паралельний валу коливань плавника. Альтернативно, вал плавника переважно може бути розташований по суті упоперек вала коливань плавника, що забезпечує можливість пристосувати конструкцію приводу для конкретних потреб, наприклад пристосувати конструкцію для розміщення в обмеженому просторі корпусу морського судна. У додатковому варіанті, якому віддається перевага здійснення рушійна установка містить два або більше плавника, з'єднані з одним і тим же валом коливання плавника за допомогою однієї синхронізуючої ланки, так що кількість окремих компонентів зберігається у відносно невеликій кількості. Згідно з іншою задачею даного винаходу забезпечений спосіб приводу в рушення корабля за допомогою рушійного пристрою згідно з ідеями даного винаходу. Короткий опис креслень Фіг.1 являє собою схематичний вигляд збоку корабля, що містить плавникову рушійну установку за даним винаходом. Фіг.2 являє собою схематичний вигляд зверху корабля, показаного на Фіг.1. Фіг.3 являє собою детальний вигляд збоку одного плавника рушійної установки згідно з Фіг.1 і 2. Фіг.4-10 являють собою схеми, що показують різні основні варіанти, яким віддається перевага виконання механічних приводів для плавникової рушійної установки. На Фіг.1 показаний схематичний вигляд збоку корабля 1 з плавниками 2, що забезпечують приведення в рух. Добре відоме використання таких плавників в плавниковій рушійній установці на кораблі або будь-якому іншому морському судні, а також для приведення в рух в інших цілях. Основний опис плавникової рушійної установки розкритий, зокрема в рефераті по патенту US 5401196 (TRIANTAFYLLOU), включеного сюди шляхом посилання. На Фіг.2 показана схема корабля на вигляді зверху згідно з Фіг.1, де встановлені два комплекти з трьох плавників 2, що забезпечують рух корабля 1. Без відходу від даного винаходу можна запропонувати пристосувати для рушія, необхідного для конкретних судів, деяку кількість плавників 2 і деяку кількість комплектів плавників, але, як показано на цих кресленнях, для погашення поперечних сил, діючих на корпус корабля під час руху, переважно мати плавники в своєму розпорядженні пари, працюючі в протилежних фазах. Згідно з основними принципами плавникового рушія, наприклад як розкрито в патенті US 5401196 (TRIANTAFYLLOU), рулі 2 розташовані так, що продовжуються з корабля у воду і у варіанті здійснення, що показує плавники 2, продовжуються з корпусу корабля 1 нижче ватерлінії 4 з отворів 7 (Фіг.3). Однак в інших варіантах здійснення, не показаних на цих кресленнях, плавники 2 можуть, альтернативно, продовжуватися з корабля у воду в будь-якому місці над ватерлінією 4. Згідно з Фіг.2 і 3 показано, що кожний з плавників 2 закріплений на каретці 5 за допомогою вала 6 плавника, що проходить з плавника 2 крізь каретку 5, так що 3 UA 98185 C2 5 10 15 20 25 30 35 40 45 50 55 60 кожний плавник 2 може повертатися в каретці 5 навколо вала 6 плавника. Кожна каретка 5 рухомо встановлена на корпусі корабля 2 за допомогою повзуна, що дозволяє каретці ковзати і здійснювати поворотно-поступальне переміщення в напрямі, по суті поперечному осі 8 симетрії корабля. Як показано на Фіг.2 кожна каретка може вміщати множину плавників 2. Рушійний вплив на корабель можна одержати об'єднаним переміщенням здійснююче поворотно-поступальне переміщення плавників 2 в поперечному осі симетрії корабля напрямі і одночасним поворотом кожного плавника 2 навколо його вала 6, а керування кутом плавника, в порівнянні з його поперечним переміщенням відносно осі 8 симетрії корабля, забезпечує можливість безшумного приводу руху корабля і/або високого КПД. На Фіг.3 детально показаний один плавник 2, що продовжується з корпусу корабля 1 у воду. Як згадано вище, плавник 2 переважного варіанта здійснення винаходу, розташований над ватерлінії 4 і, внаслідок цього, каретка 5 містить герметизуючу пластину або каретку 5, що герметизує отвір 7 в корпусі. Згідно з даним винаходом деяка кількість різних принципових варіантів виконання систем приводу для плавників 2 розкриті у всіх Фіг.4-10. Загальне для всіх цих варіантів полягає в тому, що всі вони містять колінчастий вал 9, що повертається навколо своєї подовжньої осі 13, що має коліно 10 для приводу обох привідних механізмів, привідний механізм переміщення у вертикальній площині і привідний механізм коливань відносно поперечної осі, відповідно. Коліно 10 за даним винаходом може містити одне коліно або два по суті ідентичних відносно їх кутового положення коліна і радіус відносно центральної осі 13 колінчастого вала 9. Згідно з винаходом всі інші варіанти здійснення додатково містять каретку 5, розташовану рухомо в повзунах 12 і щонайменше один плавник 2. Рушійний вплив згідно з показаними варіантами здійснення примушує рухатися або приводить в рух корабель в напрямі, показаному стрілкою або покажчиком 17. На Фіг.4 показана особливо проста і надійна конструкція рушійної установки за даним винаходом, в якій і поворотно-поступальне переміщення 14 каретки 5 і коливання плавника 2 відносно поперечної осі забезпечені за допомогою однієї тяги 15 керування, з'єднаної з одним кінцем коліна 10 на колінчастому валу 9, а іншим кінцем жорстко з'єднаної з валом 6 плавника. Коли колінчастий вал 9 повертають по стрілці 16, тяга 15 керування діє на каретку 5 подібно штоку поршня в традиційному двигуні внутрішнього згоряння і одночасно повертає плавник 2 своїм валом 6 плавника. Таким чином, і привідний механізм переміщення у вертикальній площині і привідний механізм коливання відносно поперечної осі приводять в рух тягою керування. На Фіг.5 показаний альтернативний варіант здійснення даного винаходу, де замість тяги керування згідно з Фіг.4 розташована гойдаюча тяга 18. Гойдаюча тяга 18 закріплена на коліні 10 за допомогою ковзаючого з'єднання 19, що дозволяє їй при повороті колінчастого вала 9 і коліна 10 ковзати в ковзаючому з'єднанні 19. У цьому варіанті здійснення гойдаючу тягу 18 приводить в рух тільки привідний механізм коливання відносно поперечної осі і, внаслідок цього, створює коливання плавника 2 відносно поперечної осі завдяки своєму жорсткому з'єднанню з віссю 6 плавника. Привідний механізм переміщення у вертикальній площині в цьому варіанті здійснення забезпечений пазом 21 жваво з'єднаним з коліном 10, так що при повороті колінчастого вала 9 каретка здійснює поворотно-поступальне переміщення як показано стрілкою 14. На всіх Фіг.6-8 показаний один і той же головний привідний механізм, показаний на Фіг.5, але в цих альтернативних варіантах положення плавника 2 і/або деякої кількості плавників 2 можна видозмінити без зміни конструкції привідного механізму переміщення у вертикальній площині і механізму приводу коливань відносно поперечної осі так, щоб гойдаюча тяга 18, жорстко з'єднана з валом коливань 20, викликала поворот вала 6 плавника і, внаслідок цього плавника 2, що синхронізують ланками 22,23. Підбором довжини ланок 22, 23 можна одержати зачеплення для конкретних цілей. Принцип додавання синхронізуючих ланок 22, 23 до механізму приводу коливань відносно поперечної осі можна також, без відходу від даного винаходу, використати у варіанті здійснення, показаному на Фіг.4 і з тим же результатом. На Фіг.9 показаний додатковий варіант здійснення даного винаходу, в якому кутові вертикальний і коливальний приводи такі ж, як показаний на Фіг.4, але при цьому кут між плавником 2 і тягою керування 15 можна відрегулювати за допомогою лінійного двигуна 24, наприклад гідравлічного поршня, розташованого між тягою керування 15 і гойдаючою тягою 25, жорстко з'єднаною з валом 6 плавника. Очевидно, що також можливо пристосувати цю 4 UA 98185 C2 5 10 15 20 25 конструкцію до варіантів здійснення, згаданих вище, включенням гойдаючої тяги 25 замість тяги 15 керування. Таким чином, кут між плавником або плавниками 2 і гойдаючою тягою або тягою керування можна оптимізувати для конкретних цілей і особливо так, щоб розташувати плавник або рулі 2 паралельно руху каретки 5, для того щоб не одержати значного рушійного впливу. Фахівцеві очевидно, що для регулювання кутового положення плавників 2 відносно кута тяги 15 керування або гойдаючої тяги 25 можливі інші альтернативні варіанти. На Фіг.10 показаний інший альтернативний варіант здійснення даного винаходу, в якому зачеплення 26 виконане між валом 6 плавника і валом коливань 20 плавника, що дозволяє плавнику 2 пройти під кутом відносно вала 20 коливань плавника. Внаслідок цього, зачеплення можна виконати в різних варіантах здійснення, Фіг.10 тільки розкриває зачеплення як закритий редуктор. На Фіг.10 показано, що вал 6 плавника розташований упоперек вала 20 коливань плавника, але очевидно, що зачеплення можуть бути виконані для того, щоб забезпечити інші кути між валом 6 плавника і валом 20 коливань плавника. У цьому варіанті здійснення напрям швидкості 17 відрізняється від показаного на Фіг.4-9. У наведеному вище описі даний винахід описаний з урахуванням його рушійного впливу. Однак фахівцям очевидно, що будь-яка плавникова рушійна установка і, внаслідок цього, також плавникова рушійна установка згідно з винаходом може бути використана для генерування тяги. Так відбувається тому, що при заданій швидкості течії/корабля, пристрій буде працювати як генератор нижче критичної швидкості колінчастого вала і як рушій вище критичної швидкості колінчастого вала. Що забезпечує можливість системі генерувати тягу. Крім того, напрям вертикального качання може бути будь-яким напрямом, що включає горизонтальний напрям (як риба) і вертикальне (як дельфін), якщо тільки воно знаходиться під значним кутом до основного заданого напряму тяги, при цьому перпендикуляр трохи краще. Вісь нахилу повинна мати великий кут в обох згаданих напрямах, при цьому перпендикуляр трохи краще. ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 60 1. Рушійний пристрій, встановлений всередині корпусу (1) морського судна, який містить щонайменше один плавник (2), що поступально переміщується в поперечному напрямі, прикріплений до вала (6) плавника засіб для приводу вказаного плавника (2), який містить колінчастий вал (9), механізм коливань відносно поперечної осі для повороту вказаного плавника (2) навколо осі вказаного вала (6) плавника і механізм переміщення у вертикальній площині для поступального переміщення вказаного плавника (2) в по суті поперечному напрямі відносно вказаної осі вказаного вала (6) плавника і вказаного судна, причому вказаний колінчастий вал (9) приводить в рух вказаний механізм коливань відносно поперечної осі і вказаний механізм переміщення у вертикальній площині, який відрізняється тим, що і вказаний механізм переміщення у вертикальній площині, і вказаний механізм коливань відносно поперечної осі з'єднані з одним коліном (10) на вказаному колінчастому валу (9) або з двома окремими колінами, що мають по суті однаковий радіус і кутове положення відносно осі (13) обертання вказаного колінчастого вала (9). 2. Рушійний пристрій за п. 1, який відрізняється тим, що вказаний вал (6) плавника закріплений на каретці (5), що дозволяє повертати вказаний вал (6) плавника і, внаслідок цього, вказаний плавник (2) навколо своєї осі відносно вказаної каретки (5), і тим, що вказана каретка (5) рухомо закріплена відносно вказаного колінчастого вала (9), причому вказаний механізм переміщення у вертикальній площині з'єднує вказану каретку (5) з коліном (10) на вказаному колінчастому валу (9), а вказаний механізм коливань відносно поперечної осі з'єднує вказаний вал (6) плавника з коліном (10) на вказаному колінчастому валу (9). 3. Рушійний пристрій за п. 2, який відрізняється тим, що вказаний механізм переміщення у вертикальній площині і вказаний механізм коливань відносно поперечної осі забезпечені за допомогою загальної тяги (15), (18) керування, з'єднаної на одному кінці з вказаним коліном (10) привідного вала, а на іншому кінці прикріпленої до, і продовжуваної в по суті поперечному напрямі з вала (20) коливань плавника, з'єднаного з можливістю повороту з вказаною кареткою (5), так що вказана тяга (15), (18) керування, при повороті вказаного колінчастого вала (9), змушує каретку (5) здійснювати коливальні рухи або переміщуватися поступально до і від вказаного колінчастого вала (9) і одночасно змушує повертати вказаний вал (20) коливань плавника. 4. Рушійний пристрій за п. 2, який відрізняється тим, що вказаний механізм переміщення у вертикальній площині містить паз (21) у вказаній каретці (5) і коліно (10) на вказаному колінчастому валу (9), рухомо розташоване у вказаному пазу (21), причому вказаний механізм 5 UA 98185 C2 5 10 15 20 25 30 коливань відносно поперечної осі містить гойдаючу тягу (18), прикріплену одним кінцем до, і продовжувану по суті в поперечному напрямі з вказаного вала (20) коливань плавника і прикріплену на іншому її кінці до коліна (10) на вказаному колінчастому валу (9), причому вказана гойдаюча тяга (18) є телескопічною або з'єднана або з вказаним валом (20) коливань плавника, або з вказаним коліном за допомогою пересувної втулки (19), так що вказана гойдаюча тяга (18) компенсує зміну розмірів між вказаним валом (6) плавника і вказаним коліном (10), і тому, коли вказаний колінчастий вал (9) повертають, вказаний механізм переміщення у вертикальній площині змушує каретку (5) здійснювати коливальні рухи або рухатися поступально до і від вказаного колінчастого вала (9), і одночасно вказаний механізм коливань відносно поперечної осі змушує повертатися вказаний вал (20) коливань плавника. 5. Рушійний пристрій за п. 3 або 4, який відрізняється тим, що вказаний вал (20) коливань плавника і вал (6) є одним і тим же. 6. Рушійний пристрій за п. 3 або 4, який відрізняється тим, що вказаний механізм коливань відносно поперечної осі містить синхронізуючу ланку або зачеплення (22), що з'єднує вказаний вал (20) коливань плавника з вказаним валом (6), і де вказана синхронізуюча ланка (22) розташована для синхронізації повороту вказаного вала (6) плавника з поворотом вказаного вала (20) коливань плавника. 7. Рушійний пристрій за п. 2 або 4, який відрізняється тим, що вказаний пристрій містить засіб для регулювання кута між вказаним валом (20) коливань плавника і вказаною тягою (15), (18) керування або вказаною гойдаючою тягою (15), (18). 8. Рушійний пристрій за п. 6, який відрізняється тим, що вказаний вал (6) плавника паралельний вказаному валу (20) коливань плавника. 9. Рушійний пристрій за п. 6, який відрізняється тим, що зачеплення розташоване між вказаним валом (6) плавника і вказаним валом (20) коливань плавника, так що вказаний вал (6) плавника розташований під відмінним від нуля кутом до вказаного вала (20) коливань плавника. 10. Рушійний пристрій за п. 6, який відрізняється тим, що вказаний пристрій містить два або більше плавників (6), з'єднаних з вказаним тим же валом (20) коливання плавника за допомогою однієї або більше синхронізуючих ланок (22). 11. Спосіб просування корабля за допомогою рушійного пристрою по одному з попередніх пунктів, в якому вказаний механізм переміщення у вертикальній площині і вказаний механізм коливань відносно поперечної осі з'єднані з одним коліном (10) вказаного колінчастого вала (9) або двома окремими колінами, що мають по суті однаковий радіус і кутове положення відносно осі обертання (13) вказаного колінчастого вала (9). 6 UA 98185 C2 Комп’ютерна верстка Н. Лисенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюPropulsion fin apparatus
Автори англійськоюGovert Vermeiden, Jacob
Назва патенту російськоюПлавниковое движущее устройство
Автори російськоюГоверт Вермейден Якоб
МПК / Мітки
МПК: B63H 1/36
Мітки: рушійній, плавниковий, пристрій
Код посилання
<a href="https://ua.patents.su/9-98185-plavnikovijj-rushijjnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Плавниковий рушійний пристрій</a>
Рушійний пристрій для підводного робота

Номер патенту: 27504
Опубліковано: 12.11.2007
Автори: Родічева Надія Іванівна, Данильченко Ігор Євгенович, Пишнєв Сергій Миколайович, Данильченко Наталя В'ячеславівна
МПК: B63H 20/00
Мітки: пристрій, робота, підводного, рушійній
Формула / Реферат:
1. Рушійний пристрій для підводного робота, що містить корпус з розташованим всередині електродвигуном із знижувальним редуктором і ведучим валом, гребні гвинти, встановлені на гребних валах і розміщені в насадці, який відрізняється тим, що гребні вали розміщені перпендикулярно до ведучого вала і з'єднані з останнім за допомогою конічної передачі, при цьому корпус електродвигуна закріплений зовні насадки.2. Рушійний пристрій за...
Рушійний пристрій транспортного засобу

Номер патенту: 69276
Опубліковано: 16.08.2004
Автори: Туренко Анатолій Миколайович, Богомолов Віктор Олександрович, Муринець-Маркевич Борис Миколайович, Кулик Олександр Петрович, Харченко Анатолій Іванович
МПК: F01K 25/00
Мітки: рушійній, пристрій, засобу, транспортного
Формула / Реферат:
1. Рушійний пристрій транспортного засобу, що містить ємність з робочим тілом, рекуперативний підігрівач і об'ємний двигун, вихід якого з'єднаний з рекуперативним підігрівачем, який відрізняється тим, що він містить ємність робочого тиску, камеру згорання, розміщену у внутрішній порожнині ємності робочого тиску, джерело горючого газу, наприклад природного, іскровий пристрій запалювання, другий рекуперативний підігрівач, підключений до виходу...
Забортовий електродвигуново-гвинтовий рушійний пристрій плаваючого засобу

Номер патенту: 57989
Опубліковано: 15.07.2003
Автор: Шаповаленко Кирило Вадимович
МПК: B63H 20/00, B63H 1/16
Мітки: засобу, електродвигуново-гвинтовий, рушійній, плаваючого, пристрій, забортовий
Формула / Реферат:
Забортовий електродвигуново-гвинтовий рушійний пристрій плавального засобу, що містить закриту жорстку капсулу з люком у її нижній частині, гвинт, електродвигун, електронагрівач, механічну передачу від електродвигуна до гвинта і ущільнені підшипники, який відрізняється тим, що електродвигун і електронагрівач розташовані у верхній частині капсули, заповненій рідиною - діелектриком меншої щільності, ніж вода, яка відділена від нижньої...
Підйомно-рушійний пристрій
Номер патенту: 69310
Опубліковано: 16.08.2004
Автор: Богачьова Тетяна Борисівна
МПК: B60V 1/00, F02B 61/00
Мітки: підйомно-рушійний, пристрій
Формула / Реферат:
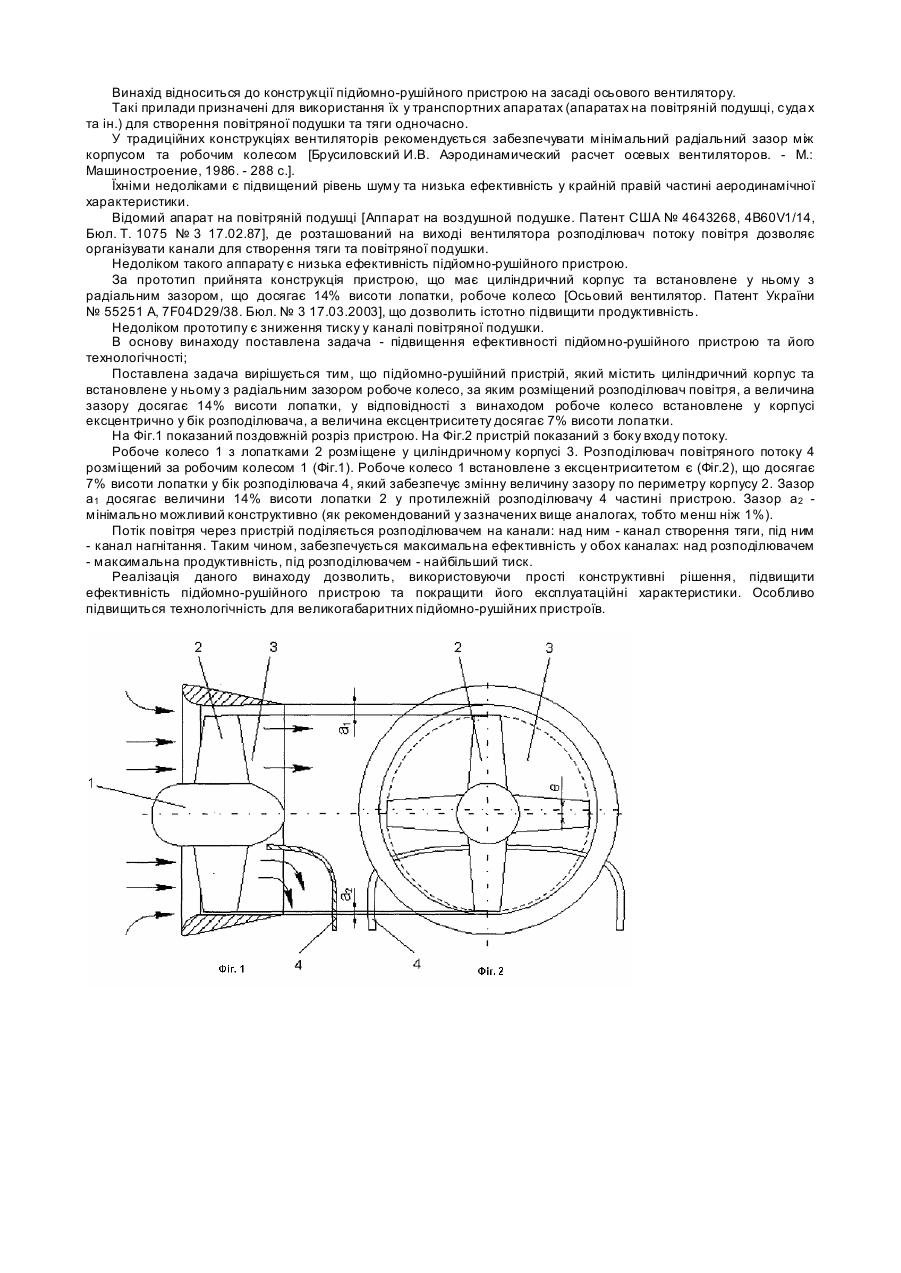
Підйомно-рушійний пристрій, що містить циліндричний корпус та встановлене у ньому з радіальним зазором робоче колесо, за яким розміщений розподільник потоку повітря, а величина зазору досягає 14 % висоти лопатки, який відрізняється тим, що робоче колесо встановлено у корпусі ексцентрично у бік розподільника, а розмір ексцентриситету досягає 7 % висоти лопатки.
Кільце-насадка із полімерних композитних матеріалів на рушійний гвинт
Номер патенту: 36005
Опубліковано: 16.04.2001
Автор: Живило Володимир Сергійович
МПК: B60V 1/00, B63B 5/00, B63B 3/14
Мітки: композитних, полімерних, кільце-насадка, рушійній, матеріалів, гвинт
Формула / Реферат:
Кільце-насадка із полімерних композитних матеріалів на рушійний гвинт, яке складається із внутрішньої у розташованої зі сторони рушійного гвинта, і зовнішньої обшивних панелей, які з'єднуються в зоні носика і по хвостику кільця-насадки та внутрішнього фермового набору, розташованого по полицях поздовжніх та поперечних "П"-подібних ребер жорсткості обшивних панелей, яке відрізняється тим, що стійки та розкоси внутрішнього...
Попередній патент: Спосіб сфінктеролеваторопластики при черевноанальній резекції прямої кишки із приводу раку
Наступний патент: Дозуючий пристрій
Випадковий патент: Пристрій для очищування коренебульбоплодів