Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об’єктом
Номер патенту: 92363
Опубліковано: 11.08.2014
Автори: Сироткіна Олена Ігорівна, Алексєєв Михайло Олександрович
Формула / Реферат
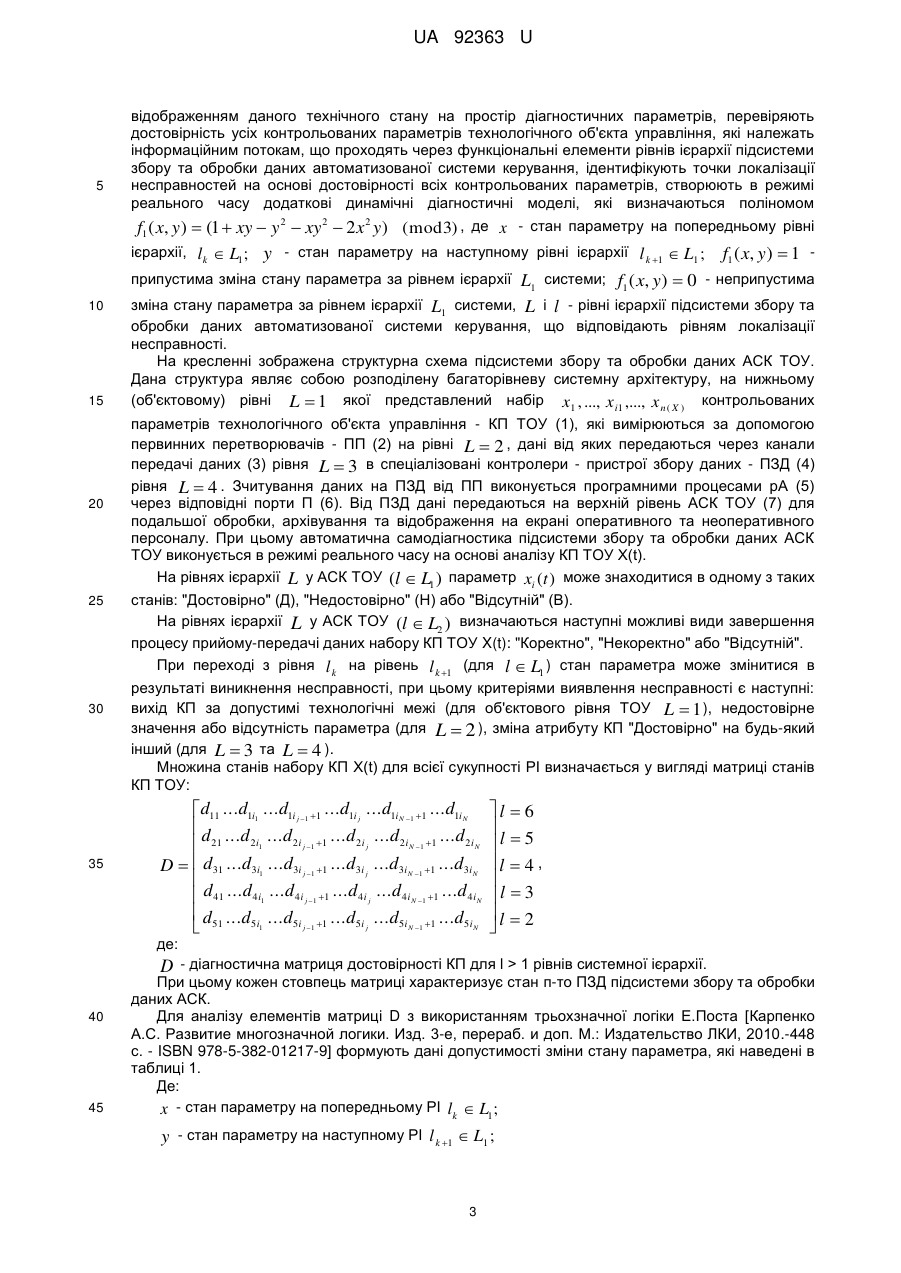
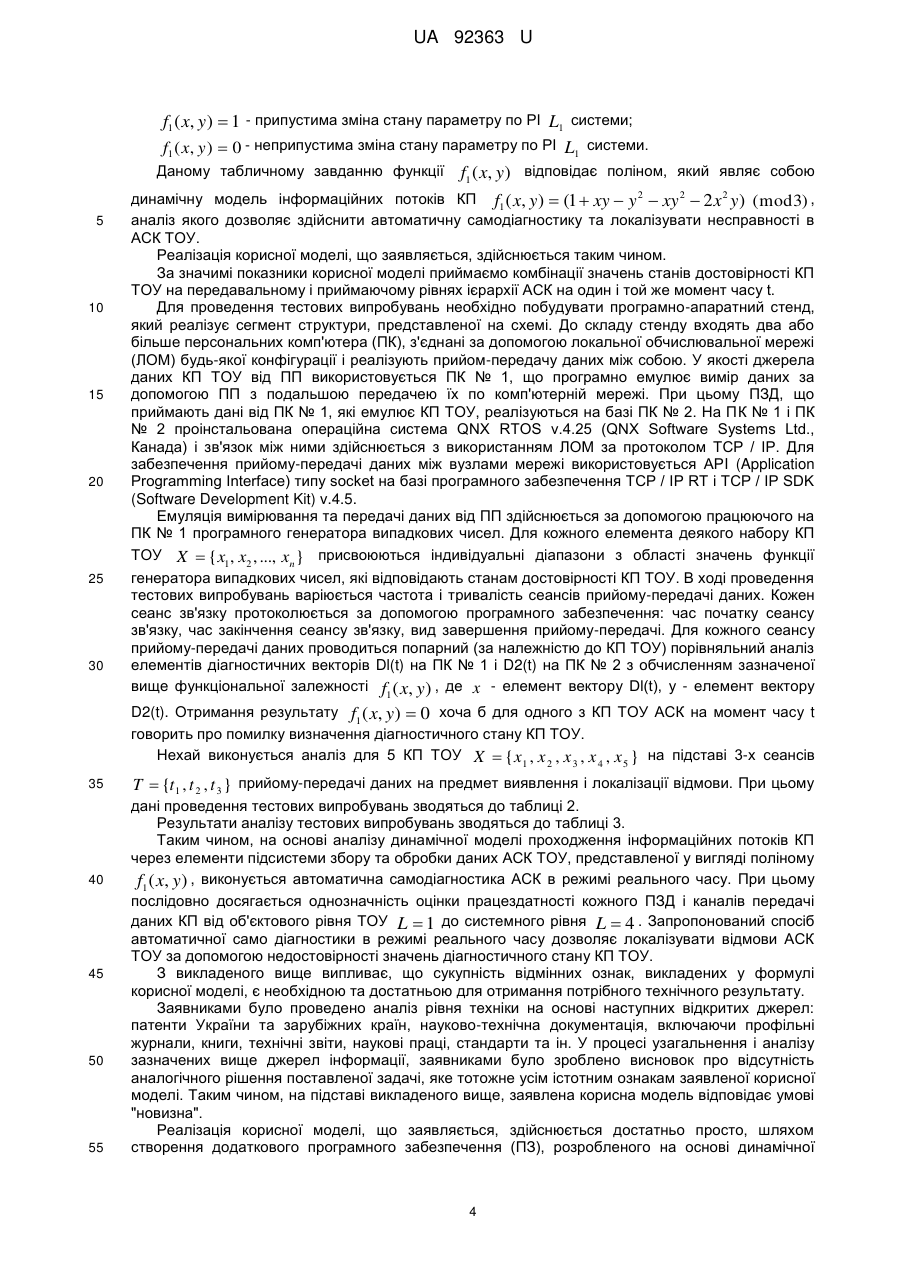
Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об'єктом, який полягає в тому, що контролюють дані експлуатаційного режиму технологічного об'єкта управління за допомогою безлічі контурів управління автоматизованої системи керування, аналізують дані експлуатаційного режиму в кожному контурі управління за допомогою підпрограм управління, автоматично генерують модель процесу технологічного об'єкту управління, засновану на зібраних даних у режимі експлуатації, виконують покроковий аналіз відповідної моделі технологічного об'єкта управління, виділеної для кожного контуру управління, діагностують відмови автоматизованої системи керування технологічним об'єктом управління, який відрізняється тим, що визначають залежність між технічним станом кожного контрольованого елемента підсистеми збору та обробки даних автоматизованої системи керування та відображенням даного технічного стану на простір діагностичних параметрів, перевіряють достовірність усіх контрольованих параметрів технологічного об'єкта управління, які належать інформаційним потокам, що проходять через функціональні елементи рівнів ієрархії підсистеми збору та обробки даних автоматизованої системи керування, ідентифікують точки локалізації несправностей на основі достовірності всіх контрольованих параметрів, створюють в режимі реального часу додаткові динамічні діагностичні моделі, які визначаються поліномом ![]()
![]() , де
, де ![]() - стан параметру на попередньому рівні ієрархії,
- стан параметру на попередньому рівні ієрархії, ![]()
![]() - стан параметру на наступному рівні ієрархії
- стан параметру на наступному рівні ієрархії ![]()
![]() - припустима зміна стану параметра за рівнем ієрархії
- припустима зміна стану параметра за рівнем ієрархії ![]() системи;
системи; ![]() - неприпустима зміна стану параметра за рівнем ієрархії
- неприпустима зміна стану параметра за рівнем ієрархії ![]() системи,
системи, ![]() і
і ![]() - рівні ієрархії підсистеми збору та обробки даних автоматизованої системи керування, що відповідають рівням локалізації несправності.
- рівні ієрархії підсистеми збору та обробки даних автоматизованої системи керування, що відповідають рівням локалізації несправності.
Текст
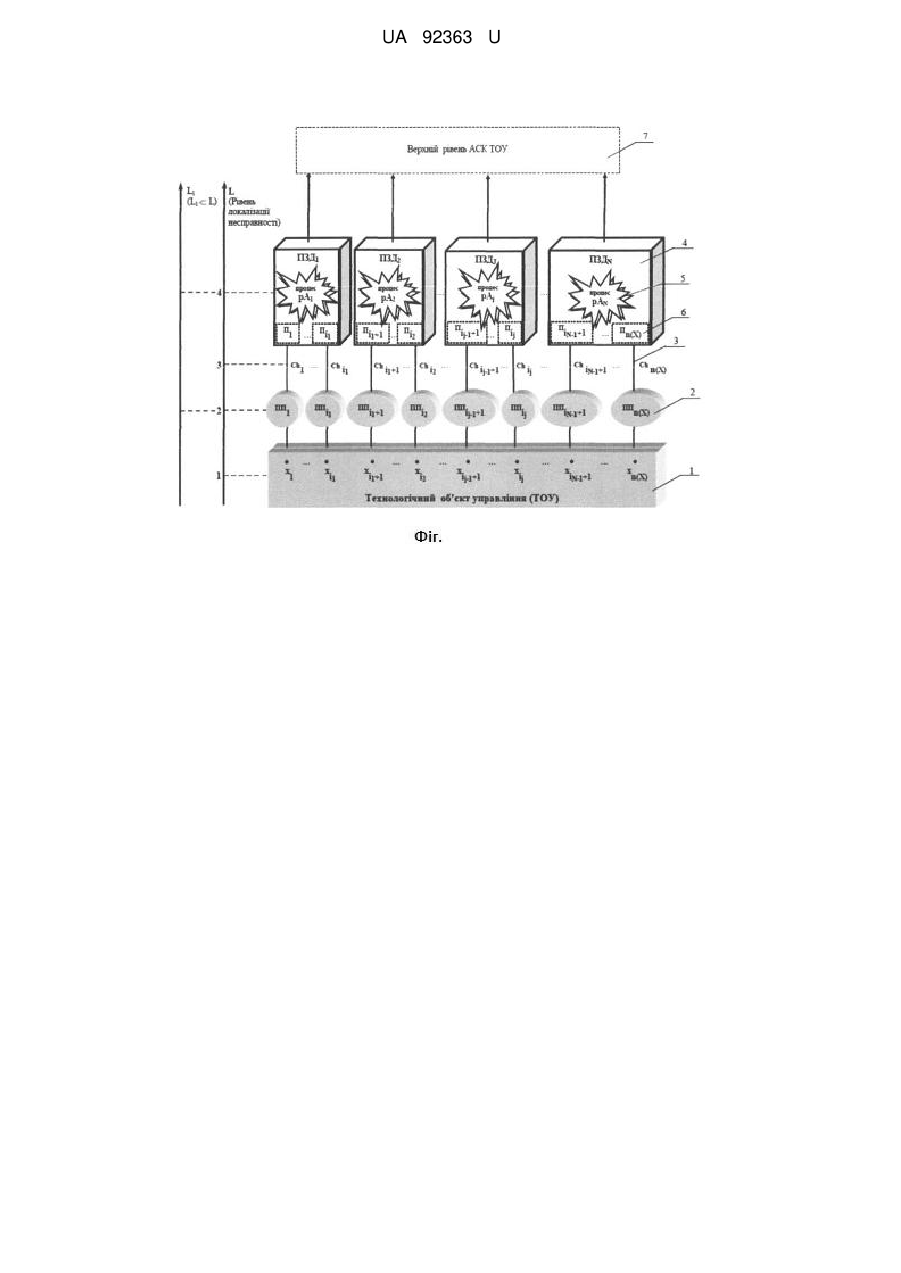
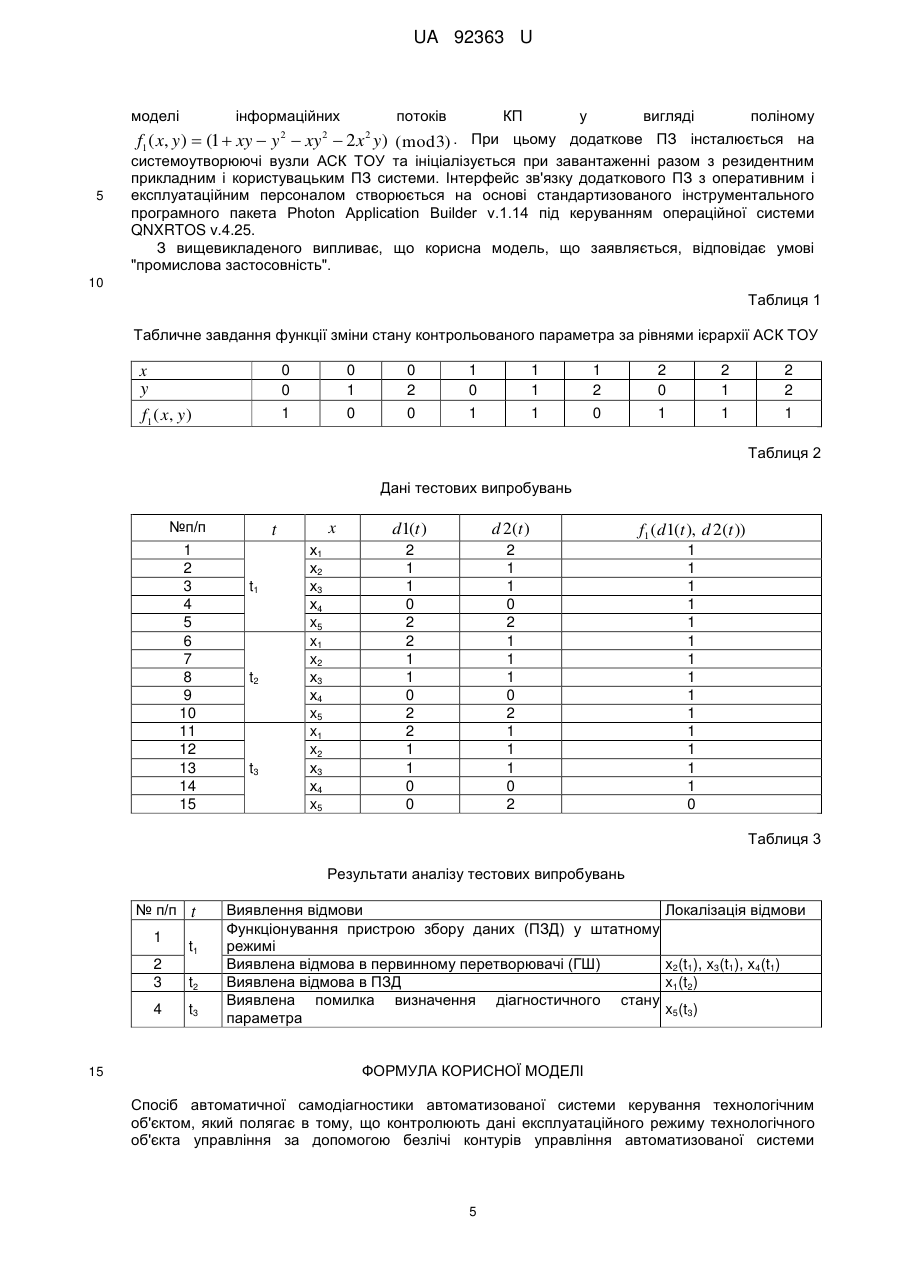
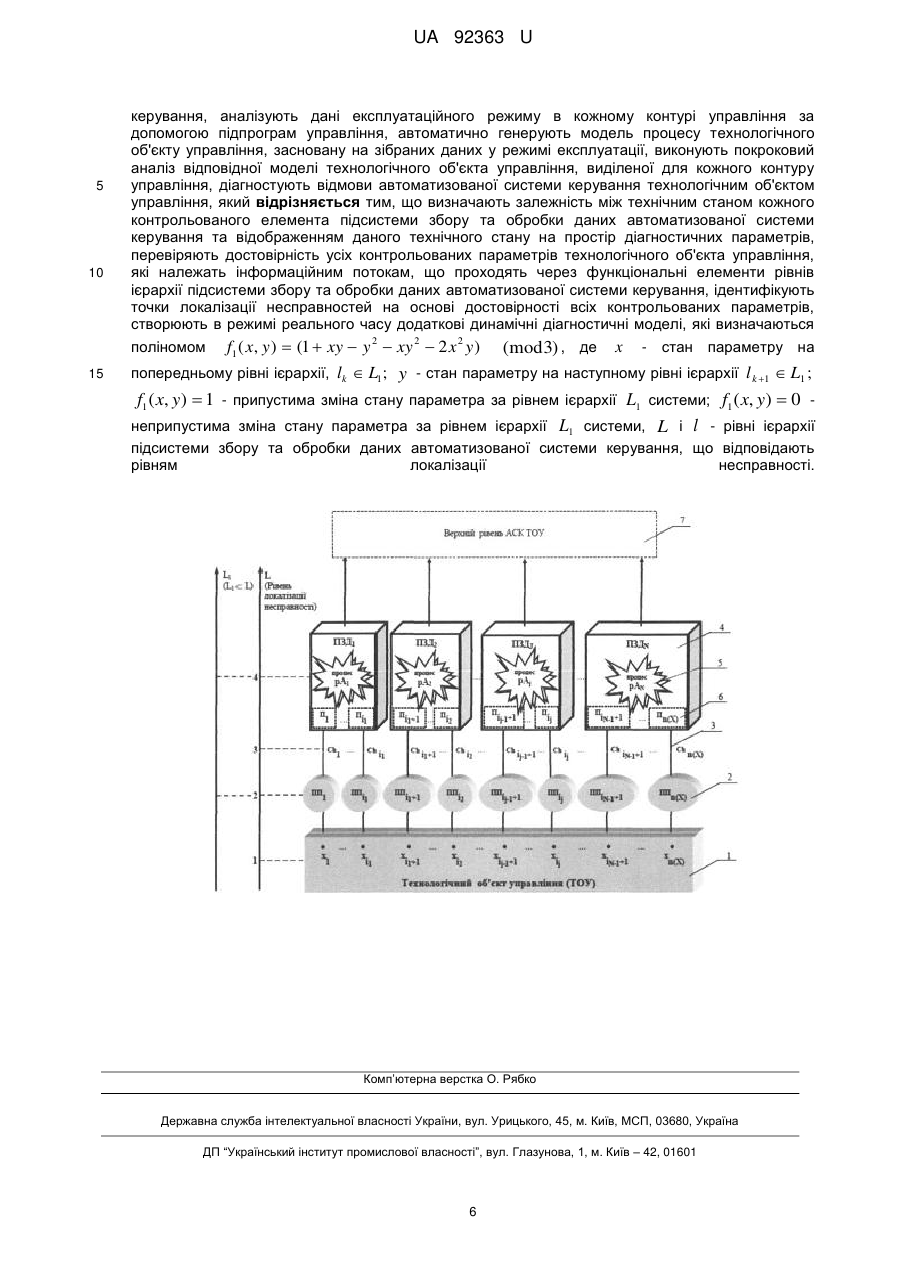
Реферат: Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об'єктом полягає в тому, що контролюють дані експлуатаційного режиму технологічного об'єкта управління за допомогою безлічі контурів управління автоматизованої системи керування, аналізують дані експлуатаційного режиму в кожному контурі управління за допомогою підпрограм управління, автоматично генерують модель процесу технологічного об'єкту управління, засновану на зібраних даних у режимі експлуатації, виконують покроковий аналіз відповідної моделі технологічного об'єкта управління, виділеної для кожного контуру управління, діагностують відмови автоматизованої системи керування технологічним об'єктом управління. Визначають залежність між технічним станом кожного контрольованого елемента підсистеми збору та обробки даних автоматизованої системи керування та відображенням даного технічного стану на простір діагностичних параметрів. Перевіряють достовірність усіх контрольованих параметрів технологічного об'єкта управління, які належать інформаційним потокам, що проходять через функціональні елементи рівнів ієрархії підсистеми збору та обробки даних автоматизованої системи керування. Ідентифікують точки локалізації несправностей на основі достовірності всіх контрольованих параметрів, створюють в режимі реального часу додаткові динамічні діагностичні моделі, які визначаються поліномом f1 ( x, y ) (1 xy y 2 xy 2 2 x 2 y ) (mod 3) . UA 92363 U (12) UA 92363 U UA 92363 U 5 10 15 20 25 30 35 40 45 50 55 60 Спосіб автоматичної самодіагностики автоматизованої системи керування (АСК) технологічним об'єктом управління (ТОУ) призначений для забезпечення безвідмовної роботи автоматизованих інформаційних та інформаційно-керуючих систем, включених до контуру управління ТОУ. Корисна модель належить до промислової автоматизації, зокрема, до галузі створення АСК ТОУ відповідального призначення, багаторівневих ієрархічно розподілених багатокористувацьких і багатозадачних апаратно-програмних комплексів, які застосовуються в промисловості, енергетиці та комунальному господарстві. Перераховані галузі застосування АСК ТОУ обумовлюють підвищені вимоги до їх надійності та безвідмовності роботи. 7 Відомий спосіб діагностики стану АСК ТОУ [United States Patent US 6,181,975 Bl, Int. Cl. G05В13/02 Industrial process surveillance system / Inventors: Kenneth С Gross, Bolingbrook; Stephan W Wegerich, Glendale Height; Ralph M. Singer, Naperville, all of IL (US); Jack E. Mott, Idaho Falls, ГО (US) - Appl. No.: 09/028,443; Filed: Feb. 24, 1998; Date of Patent: Jan. 30, 2001. - Режим доступу до патенту: http://www.google.com.mx/patents/US6181975], прийнятий за аналог, включає наступну послідовність дій: контролюють ТОУ за допомогою промислових первинних перетворювачів, в АСК визначають діапазон зміни даних від ТОУ, порівнюють отримані від ТОУ значення даних із заданими значеннями даних, що відповідають режиму нормального функціонування ТОУ, визначають відхилення даних ТОУ від заданих значень, за допомогою АСК видають сигнал тривоги у разі відхилення набору даних ТОУ від заданих значень. До недоліків розглянутого вище аналога, що не дозволяють досягти зазначеного технічного результату, який описаний нижче, належить те, що не враховується працездатність самої АСК, як апаратно-програмного комплексу, включеного в контур управління ТОУ. При цьому АСК схильна до збоїв, оборотних і необоротних відмов [Военный энциклопедический словарь ракетных войск стратегического назначения / [Военная академия РВСН имени Петра Великого]. - М.: Научн. изд-во "Большая Российская энциклопедия", 1999.-634 с, ISBN 5-85270-315-Х]. Це може призводити до того, що АСК ТОУ, за умови перебування в повністю або частково непрацездатному стані, не зможе забезпечити виконання необхідних функцій контролю та управління ТОУ. Найбільш близьким технічним рішенням є відомий спосіб діагностики стану АСК ТОУ [United States Patent US 7,444,191 B2, Int. Cl. G 05 В 13/02 (2006.01) Process model identification in a process control system / Inventors: John Caldwell, Austin, TX (US); Terrence L. Blevins, Round Rock, TX(US); Peter Wojsznis, Austin, TX (US); Wilhelm K. Wojsznis, Austin, TX (US) - Appl. No.: 11/243,862; Filed: Oct. 4, 2005; Date of Patent: Oct. 28, 2008 - Режим доступу до патенту: http://www.google.nl/patents/US7444191], який включає наступну послідовність дій: контролюють дані експлуатаційного режиму ТОУ за допомогою безлічі контурів управління АСК, аналізують в АСК дані експлуатаційного режиму ТОУ в кожному контурі управління за допомогою підпрограм управління, автоматично генерують модель процесу ТОУ, засновану на зібраних даних експлуатаційного режиму, виконують покроковий аналіз відповідної моделі ТОУ, виділеної для кожного контуру управління, діагностують відмови АСК ТОУ. До недоліків розглянутого вище найбільш близького технічного рішення, що не дозволяють досягти зазначеного технічного результату, який описаний нижче, відноситься те, що самодіагностика всього апаратно-програмного комплексу АСК ТОУ виконується тільки в рамках моделі процесу в ТОУ з частковим урахуванням режимів роботи окремих підпрограм управління ТОУ, які функціонують у спеціалізованих блоках контурів управління. При цьому не враховується працездатність інших системоутворюючих вузлів АСК, а також середовища передачі даних між рівнями ієрархії АСК, що є критично важливим при забезпеченні як процесів управління ТОУ, так і діагностики АСК, інтегрованої з ТОУ за допомогою первинних перетворювачів, польових шин та ін. Для фахівців у даній галузі техніки очевидним є, що АСК ТОУ є однією зі складових контуру управління в системі керування ТОУ. Тому безперервна автоматична самодіагностика функціонування АСК ТОУ в режимі реального часу є досить актуальним завданням, що лежить в основі забезпечення надійності, живучості та відмовостійкості в процесі експлуатації. Дане твердження випливає з того, що збір даних експлуатаційних режимів у всіх АСК, здійснюється на нижньому ієрархічному рівні, - в спеціалізованих контролерах. При цьому зазначені контролери виконують основні функції збору і буферизації даних з подальшою передачею даних на верхній рівень АСК для подальшої їх обробки, виконання аналізу отриманих даних, генерування моделей управління та видачі уставок для формування керуючих впливів на ТОУ [David Bailey, Edwin Wright. Practical SCADA for Industry (IDC Technology). Linacre House, Jordan Hill, Oxford OX2 8DP 200 Wheeler Road, Burlington, MA 01803. 2003. ISBN 07506 58053]. Таким чином, надійність функціонування АСК в контурі управління ТОУ визначається не тільки 1 UA 92363 U 5 10 15 20 25 30 35 40 45 50 55 60 підпрограмами управління та моделями процесу ТОУ, які були розглянуті вище у найбільш близькому технічному рішенні, але і підсистемою збору та аналізу даних експлуатаційного режиму, що виконується іншими системоутворюючими вузлами розподіленої багаторівневої АСК ТОУ. На підставі викладеного можна зробити висновок про те, що дане найбільш близьке технічне рішення має суттєві недоліки в частині повноти та надійності діагностики підсистем АСК, системоутворюючих вузлів і середовища передачі даних у процесі експлуатації в складі контуру управління ТОУ, що може викликати як непередбачену поведінку керуючої АСК, так і аварійний стан ТОУ. Суть корисної моделі полягає в наступному. В даний час в різних галузях промисловості, енергетики та комунального господарства все більш широке застосування знаходять АСК ТОУ, до яких пред'являються підвищені вимоги в частині надійності, безвідмовності та безпеки використання. Критично важливими елементами АСК ТОУ, які безпосередньо впливають на перелічені фактори надійності, є системоутворюючі вузли та середа передачі даних між ними [David Bailey, Edwin Wright. Practical SCADA for Industry (IDC Technology). Linacre House, Jordan Hill, Oxford OX2 8DP 200 Wheeler Road, Burlington, MA 01803. 2003. ISBN 07506 58053]. До системоутворюючих вузлів, які безпосередньо впливають на надійність роботи АСК, насамперед, відносяться пристрої збору даних (ПЗД). У якості середовища передачі даних в промислових АСК ТОУ можуть застосовуватися локальні обчислювальні мережі (ЛОМ), радіоканал та багато інших видів комунікацій між комп'ютерними вузлами для забезпечення прийому-передачі даних відповідно до протоколів обміну даними [Технология передачи данных, 7-е изд. / Г. Хелд. - СПб.: Питер, 2003.-720 с: ил. - (Серия "Классика computer science"). - ISBN 5-94723-472-6]. Виходячи з цього, була поставлена технічна задача - створення способу автоматичної самодіагностики АСК ТОУ в режимі реального часу, що є основою підвищення її надійності, відмовостійкості та живучості, оскільки дозволяє експлуатаційним службам підприємства значно скоротити час відновлення працездатності АСК ТОУ після оборотних і необоротних відмов. Автоматична самодіагностика АСК ТОУ в режимі реального часу повинна забезпечити постійний самоконтроль працездатності основних системних компонентів підсистеми збору та обробки даних, виявляти відхилення в роботі цих компонентів і своєчасно сповіщати оперативно-диспетчерську та експлуатаційну служби підприємства про ті чи інші несправності, які виникають у роботі системи. Основними компонентами підсистеми збору та обробки даних АСК ТОУ є первинні перетворювачі (ПП), пристрої збору даних (ПЗД) і канали передачі даних між ними. Ця задача досягається за рахунок створення в процесі роботи АСК ТОУ додаткових динамічних діагностичних моделей, на основі яких встановлюється однозначна залежність між технічним станом кожного контрольованого елемента підсистеми збору та обробки даних у структурній ієрархії АСК і відображенням даного технічного стану на простір діагностичних параметрів. При цьому перевіряється достовірність усіх контрольованих параметрів (КП) ТОУ, які належать інформаційним потокам, що проходять через функціональні елементи рівнів ієрархії (РІ) підсистеми збору та обробки даних АСК ТОУ. Достовірність всіх КП залежить від значень набору діагностичних параметрів (ДП) в різних точках локалізації. Заявниками передбачається досягнення при реалізації здійснення корисної моделі наступного технічного результату - підвищення надійності та відмовостійкості АСК як складового елемента контуру управління ТОУ, передбаченість поведінки АСК ТОУ в умовах схильності до збоїв, оборотних і необоротних відмов, несанкціонованого та / або зловмисного втручання в її функціонування, шляхом видачі оперативному і ремонтно-експлуатаційному персоналу своєчасної та достовірної діагностичної інформації щодо видів несправностей та їх локалізації на різних РІ підсистеми збору та обробки даних апаратно-програмного комплексу АСК ТОУ. Відзначений технічний результат при реалізації корисної моделі досягається тим, що контролюють дані експлуатаційного режиму технологічного об'єкта управління за допомогою безлічі контурів управління автоматизованої системи керування, аналізують дані експлуатаційного режиму в кожному контурі управління за допомогою підпрограм управління, автоматично генерують модель процесу технологічного об'єкту управління, засновану на зібраних даних у режимі експлуатації, виконують покроковий аналіз відповідної моделі технологічного об'єкта управління, виділеної для кожного контуру управління, діагностують відмови автоматизованої системи керування технологічним об'єктом управління, згідно з корисною моделлю, визначають залежність між технічним станом кожного контрольованого елемента підсистеми збору та обробки даних автоматизованої системи керування та 2 UA 92363 U 5 відображенням даного технічного стану на простір діагностичних параметрів, перевіряють достовірність усіх контрольованих параметрів технологічного об'єкта управління, які належать інформаційним потокам, що проходять через функціональні елементи рівнів ієрархії підсистеми збору та обробки даних автоматизованої системи керування, ідентифікують точки локалізації несправностей на основі достовірності всіх контрольованих параметрів, створюють в режимі реального часу додаткові динамічні діагностичні моделі, які визначаються поліномом f1 ( x, y ) (1 xy y 2 xy 2 2 x 2 y ) (mod 3) , де x - стан параметру на попередньому рівні ієрархії, lk L1 ; y - стан параметру на наступному рівні ієрархії l k 1 L1 ; f1 ( x, y ) 1 L1 системи; f1 ( x, y) 0 - неприпустима зміна стану параметра за рівнем ієрархії L1 системи, L і l - рівні ієрархії підсистеми збору та припустима зміна стану параметра за рівнем ієрархії 10 15 20 25 30 35 обробки даних автоматизованої системи керування, що відповідають рівням локалізації несправності. На кресленні зображена структурна схема підсистеми збору та обробки даних АСК ТОУ. Дана структура являє собою розподілену багаторівневу системну архітектуру, на нижньому (об'єктовому) рівні L 1 якої представлений набір x1 , ..., x i1 ,..., x n ( X ) контрольованих параметрів технологічного об'єкта управління - КП ТОУ (1), які вимірюються за допомогою первинних перетворювачів - ПП (2) на рівні L 2 , дані від яких передаються через канали передачі даних (3) рівня L 3 в спеціалізовані контролери - пристрої збору даних - ПЗД (4) рівня L 4 . Зчитування даних на ПЗД від ПП виконується програмними процесами рА (5) через відповідні порти П (6). Від ПЗД дані передаються на верхній рівень АСК ТОУ (7) для подальшої обробки, архівування та відображення на екрані оперативного та неоперативного персоналу. При цьому автоматична самодіагностика підсистеми збору та обробки даних АСК ТОУ виконується в режимі реального часу на основі аналізу КП ТОУ X(t). На рівнях ієрархії L у АСК ТОУ (l L1 ) параметр xi (t ) може знаходитися в одному з таких станів: "Достовірно" (Д), "Недостовірно" (Н) або "Відсутній" (В). На рівнях ієрархії L у АСК ТОУ (l L2 ) визначаються наступні можливі види завершення процесу прийому-передачі даних набору КП ТОУ X(t): "Коректно", "Некоректно" або "Відсутній". При переході з рівня l k на рівень l k 1 (для l L1 ) стан параметра може змінитися в результаті виникнення несправності, при цьому критеріями виявлення несправності є наступні: вихід КП за допустимі технологічні межі (для об'єктового рівня ТОУ L 1 ), недостовірне значення або відсутність параметра (для L 2 ), зміна атрибуту КП "Достовірно" на будь-який інший (для L 3 та L 4 ). Множина станів набору КП Х(t) для всієї сукупності РІ визначається у вигляді матриці станів КП ТОУ: d11 ... d1i1 ... d1i j 1 1 ... d1i j ... d1i N 1 1 ... d1i N d ... d ... d 2 i1 2 i j 1 1 ... d 2 i j ... d 2 i N 1 1 ... d 2 i N 21 D d31 ... d3i1 ... d3i j 1 1 ... d3i j ... d3i N 1 1 ... d3i N d 41 ... d 4i1 ... d 4i j 1 1 ... d 4i j ... d 4i N 1 1 ... d 4i N d51 ... d5i ... d5i 1 ... d5i ... d5i 1 ... d5i 1 j 1 j N 1 N де: 40 45 l 6 l 5 l 4, l 3 l 2 D - діагностична матриця достовірності КП для l > 1 рівнів системної ієрархії. При цьому кожен стовпець матриці характеризує стан п-то ПЗД підсистеми збору та обробки даних АСК. Для аналізу елементів матриці D з використанням трьохзначної логіки Е.Поста [Карпенко А.С. Развитие многозначной логики. Изд. 3-е, перераб. и доп. М.: Издательство ЛКИ, 2010.-448 с. - ISBN 978-5-382-01217-9] формують дані допустимості зміни стану параметра, які наведені в таблиці 1. Де: x - стан параметру на попередньому РІ lk L1; y - стан параметру на наступному РІ l k 1 L1 ; 3 UA 92363 U f1 ( x, y ) 1 - припустима зміна стану параметру по PI L1 системи; f1 ( x, y) 0 - неприпустима зміна стану параметру по PI L1 системи. Даному табличному завданню функції f1 ( x, y ) відповідає поліном, який являє собою 5 10 15 20 25 30 динамічну модель інформаційних потоків КП f1 ( x, y ) (1 xy y 2 xy 2 2 x 2 y ) (mod 3) , аналіз якого дозволяє здійснити автоматичну самодіагностику та локалізувати несправності в АСК ТОУ. Реалізація корисної моделі, що заявляється, здійснюється таким чином. За значимі показники корисної моделі приймаємо комбінації значень станів достовірності КП ТОУ на передавальному і приймаючому рівнях ієрархії АСК на один і той же момент часу t. Для проведення тестових випробувань необхідно побудувати програмно-апаратний стенд, який реалізує сегмент структури, представленої на схемі. До складу стенду входять два або більше персональних комп'ютера (ПК), з'єднані за допомогою локальної обчислювальної мережі (ЛОМ) будь-якої конфігурації і реалізують прийом-передачу даних між собою. У якості джерела даних КП ТОУ від ПП використовується ПК № 1, що програмно емулює вимір даних за допомогою ПП з подальшою передачею їх по комп'ютерній мережі. При цьому ПЗД, що приймають дані від ПК № 1, які емулює КП ТОУ, реалізуються на базі ПК № 2. На ПК № 1 і ПК № 2 проінстальована операційна система QNX RTOS v.4.25 (QNX Software Systems Ltd., Канада) і зв'язок між ними здійснюється з використанням ЛОМ за протоколом TCP / IP. Для забезпечення прийому-передачі даних між вузлами мережі використовується API (Application Programming Interface) типу socket на базі програмного забезпечення TCP / IP RT і TCP / IP SDK (Software Development Kit) v.4.5. Емуляція вимірювання та передачі даних від ПП здійснюється за допомогою працюючого на ПК № 1 програмного генератора випадкових чисел. Для кожного елемента деякого набору КП ТОУ X {x1 , x2 , ..., xn } присвоюються індивідуальні діапазони з області значень функції генератора випадкових чисел, які відповідають станам достовірності КП ТОУ. В ході проведення тестових випробувань варіюється частота і тривалість сеансів прийому-передачі даних. Кожен сеанс зв'язку протоколюється за допомогою програмного забезпечення: час початку сеансу зв'язку, час закінчення сеансу зв'язку, вид завершення прийому-передачі. Для кожного сеансу прийому-передачі даних проводиться попарний (за належністю до КП ТОУ) порівняльний аналіз елементів діагностичних векторів Dl(t) на ПК № 1 і D2(t) на ПК № 2 з обчисленням зазначеної вище функціональної залежності f1 ( x, y ) , де x - елемент вектору Dl(t), у - елемент вектору D2(t). Отримання результату f1 ( x, y ) 0 хоча б для одного з КП ТОУ АСК на момент часу t говорить про помилку визначення діагностичного стану КП ТОУ. Нехай виконується аналіз для 5 КП ТОУ X {x1 , x 2 , x 3 , x 4 , x 5 } на підставі 3-х сеансів 35 40 45 50 55 T {t1 , t 2 , t 3 } прийому-передачі даних на предмет виявлення і локалізації відмови. При цьому дані проведення тестових випробувань зводяться до таблиці 2. Результати аналізу тестових випробувань зводяться до таблиці 3. Таким чином, на основі аналізу динамічної моделі проходження інформаційних потоків КП через елементи підсистеми збору та обробки даних АСК ТОУ, представленої у вигляді поліному f1 ( x, y ) , виконується автоматична самодіагностика АСК в режимі реального часу. При цьому послідовно досягається однозначність оцінки працездатності кожного ПЗД і каналів передачі даних КП від об'єктового рівня ТОУ L 1 до системного рівня L 4 . Запропонований спосіб автоматичної само діагностики в режимі реального часу дозволяє локалізувати відмови АСК ТОУ за допомогою недостовірності значень діагностичного стану КП ТОУ. З викладеного вище випливає, що сукупність відмінних ознак, викладених у формулі корисної моделі, є необхідною та достатньою для отримання потрібного технічного результату. Заявниками було проведено аналіз рівня техніки на основі наступних відкритих джерел: патенти України та зарубіжних країн, науково-технічна документація, включаючи профільні журнали, книги, технічні звіти, наукові праці, стандарти та ін. У процесі узагальнення і аналізу зазначених вище джерел інформації, заявниками було зроблено висновок про відсутність аналогічного рішення поставленої задачі, яке тотожне усім істотним ознакам заявленої корисної моделі. Таким чином, на підставі викладеного вище, заявлена корисна модель відповідає умові "новизна". Реалізація корисної моделі, що заявляється, здійснюється достатньо просто, шляхом створення додаткового програмного забезпечення (ПЗ), розробленого на основі динамічної 4 UA 92363 U моделі інформаційних 5 потоків КП у вигляді поліному f1 ( x, y ) (1 xy y xy 2 x y ) (mod 3) . При цьому додаткове ПЗ інсталюється на системоутворюючі вузли АСК ТОУ та ініціалізується при завантаженні разом з резидентним прикладним і користувацьким ПЗ системи. Інтерфейс зв'язку додаткового ПЗ з оперативним і експлуатаційним персоналом створюється на основі стандартизованого інструментального програмного пакета Photon Application Builder v.1.14 під керуванням операційної системи QNXRTOS v.4.25. З вищевикладеного випливає, що корисна модель, що заявляється, відповідає умові "промислова застосовність". 2 2 2 10 Таблиця 1 Табличне завдання функції зміни стану контрольованого параметра за рівнями ієрархії АСК ТОУ x y 0 0 0 1 0 2 1 0 1 1 1 2 2 0 2 1 2 2 f1 ( x, y ) 1 0 0 1 1 0 1 1 1 Таблиця 2 Дані тестових випробувань №п/п 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 x t t1 t2 t3 х1 х2 х3 х4 x5 x1 x2 х3 х4 x5 x1 x2 х3 х4 x5 d1(t ) d 2(t ) f1 (d1(t ), d 2(t )) 2 1 1 0 2 2 1 1 0 2 2 1 1 0 0 2 1 1 0 2 1 1 1 0 2 1 1 1 0 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 Таблиця 3 Результати аналізу тестових випробувань № п/п 1 t t1 2 3 4 15 t2 t3 Виявлення відмови Функціонування пристрою збору даних (ПЗД) у штатному режимі Виявлена відмова в первинному перетворювачі (ГШ) Виявлена відмова в ПЗД Виявлена помилка визначення діагностичного стану параметра Локалізація відмови x2(t1), x3(t1), x4(t1) x1(t2) x5(t3) ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об'єктом, який полягає в тому, що контролюють дані експлуатаційного режиму технологічного об'єкта управління за допомогою безлічі контурів управління автоматизованої системи 5 UA 92363 U 5 10 керування, аналізують дані експлуатаційного режиму в кожному контурі управління за допомогою підпрограм управління, автоматично генерують модель процесу технологічного об'єкту управління, засновану на зібраних даних у режимі експлуатації, виконують покроковий аналіз відповідної моделі технологічного об'єкта управління, виділеної для кожного контуру управління, діагностують відмови автоматизованої системи керування технологічним об'єктом управління, який відрізняється тим, що визначають залежність між технічним станом кожного контрольованого елемента підсистеми збору та обробки даних автоматизованої системи керування та відображенням даного технічного стану на простір діагностичних параметрів, перевіряють достовірність усіх контрольованих параметрів технологічного об'єкта управління, які належать інформаційним потокам, що проходять через функціональні елементи рівнів ієрархії підсистеми збору та обробки даних автоматизованої системи керування, ідентифікують точки локалізації несправностей на основі достовірності всіх контрольованих параметрів, створюють в режимі реального часу додаткові динамічні діагностичні моделі, які визначаються f1 ( x, y ) (1 xy y 2 xy 2 2 x 2 y ) (mod 3) , де x - стан параметру на попередньому рівні ієрархії, lk L1 ; y - стан параметру на наступному рівні ієрархії l k 1 L1 ; поліномом 15 f1 ( x, y ) 1 - припустима зміна стану параметра за рівнем ієрархії L1 системи; f1 ( x, y) 0 неприпустима зміна стану параметра за рівнем ієрархії L1 системи, L і l - рівні ієрархії підсистеми збору та обробки даних автоматизованої системи керування, що відповідають рівням локалізації несправності. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюAleksieiev Mykhailo Oleksandrovych, Syrotkina Olena Ihorivna
Автори російськоюАлексеев Михаил Александрович, Сироткина Елена Игоревна
МПК / Мітки
МПК: G06F 11/07, G05B 13/02, G05B 17/00, G06F 11/25
Мітки: системі, самодіагностики, технологічним, спосіб, автоматичної, об'єктом, автоматизованої, керування
Код посилання
<a href="https://ua.patents.su/8-92363-sposib-avtomatichno-samodiagnostiki-avtomatizovano-sistemi-keruvannya-tekhnologichnim-obehktom.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичної самодіагностики автоматизованої системи керування технологічним об’єктом</a>
Ідентифікатор компонентів автоматизованої системи
Номер патенту: 28617
Опубліковано: 10.12.2007
Автор: Костерін Олексій Сергійович
МПК: G08G 1/00
Мітки: компонентів, ідентифікатор, автоматизованої, системі
Формула / Реферат:
Ідентифікатор компонентів автоматизованої системи, що складається з мікроконтролера, який відрізняється тим, що додатково містить мікросхему інтерфейсу, яка виконана з можливістю інтегрування у кожний компонент системи.
Спосіб здійснення координованої роботи периферійних пристроїв у складі автоматизованої системи керування дорожнім рухом з використанням інформаційних пакетів
Номер патенту: 30620
Опубліковано: 11.03.2008
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: периферійних, координованої, інформаційних, керування, системі, роботи, спосіб, рухом, використанням, пристроїв, пакетів, автоматизованої, складі, здійснення, дорожнім
Формула / Реферат:
1. Спосіб здійснення координованої роботи периферійних об'єктів з центром керування в автоматизованих системах керування дорожнім рухом, який здійснюють шляхом передачі керуючих пакетів команд по каналах зв'язку, який відрізняється тим, що канал зв'язку утворюють періодично з одночасною синхронізацією таймерів периферійних пристроїв і центра керування та передачею керуючого пакета програм.2. Спосіб за п. 1, який відрізняється тим, що...
Спосіб ремонту автоматизованої системи керування і обробки інформації виробу 9с18
Номер патенту: 26090
Опубліковано: 10.09.2007
Автори: Захрабов Микола Нурушевич, Іванченко Валерій Олександрович, Федяєв Сергій Максимович, Матвійчук Володимир Іванович
МПК: G01S 13/00, G01S 7/00, H02K 15/00
Мітки: виробу, обробки, керування, системі, автоматизованої, ремонту, 9с18, спосіб, інформації
Формула / Реферат:
1. Спосіб ремонту автоматизованої системи керування і обробки інформації виробу 9С18, при якому здійснюють введення машини з розташованим у ній виробом 9С18, у якому розміщена автоматизована система керування і обробки інформації, у ремонтний комплекс, здійснюють технологічні операції з відкриття кришок технологічних відсіків, шаф і стелажів автоматизованої системи керування і обробки інформації, проводять очищення шаф і стійок від пилу і...
Спосіб побудови автоматизованої бібліотечної системи

Номер патенту: 19118
Опубліковано: 15.12.2006
Автори: Пєвнєв Володимир Яковлевич, Логвиненко Микола Федорович, Серков Олександр Анатолійович, Чурюмов Геннадій Іванович
МПК: G06F 7/10
Мітки: спосіб, системі, автоматизованої, бібліотечної, побудови
Формула / Реферат:
Спосіб побудови автоматизованої бібліотечної системи, що включає до свого складу подачу масиву даних, розбиття вхідних даних на складові, який відрізняється тим, що архітектурна структура системи змінюється в залежності від структури та типу вхідних даних за рахунок їх сортування по полях записів у базі даних, причому одночасно із надходженням даних здійснюється їх обробка із виводом на монітор обробленого масиву даних у реальному часі.
Спосіб автоматизованої обробки даних обліку та керування ресурсами підприємства з надання житлово-комунальних послуг
Номер патенту: 39976
Опубліковано: 25.03.2009
Автори: Яковенко Даніл Борисович, Перхун Андрій Петрович, Безрук Андрій В'ячеславович
МПК: G06Q 10/00, G06F 17/40
Мітки: обліку, обробки, даних, підприємства, послуг, керування, житлово-комунальних, надання, спосіб, ресурсами, автоматизованої
Формула / Реферат:
Спосіб автоматизованої обробки даних обліку і керування ресурсами підприємства з надання житлово-комунальних послуг, з використанням комп'ютерних систем і мережі Інтернет, що включає операції формування баз даних параметрів житлових будинків, особових рахунків мешканців будинків і наданих послуг, ідентифікованих за житловим будинком, обробки даних сформованих баз з урахуванням нормативних тарифів з наступним встановленням даних про розмір...