Лінійний асинхронний регульований електропривод
Номер патенту: 92712
Опубліковано: 25.11.2010
Автори: Литвинова Таісія Серафимівна, Жукова Наталя Вікторівна, Литвинов Віктор Іванович

Формула / Реферат
Лінійний асинхронний регульований електропривод, що містить блок управління і силовий блок, що складається з постійної ланки і інвертора, вхід якого підключений до блока управління, а вихід - до фазних обмоток асинхронного електродвигуна, який відрізняється тим, що блок управління і силовий блок виконані триканальними, причому кожен канал блока управління містить фазообертач, широтно-імпульсний модулятор і систему імпульсно-фазового управління, а кожен канал силового блока містить регульовану постійну ланку і чотириключовий інвертор, причому кожна фазна обмотка електродвигуна підключена окремо до виходів одного інвертора силового блока.
Текст
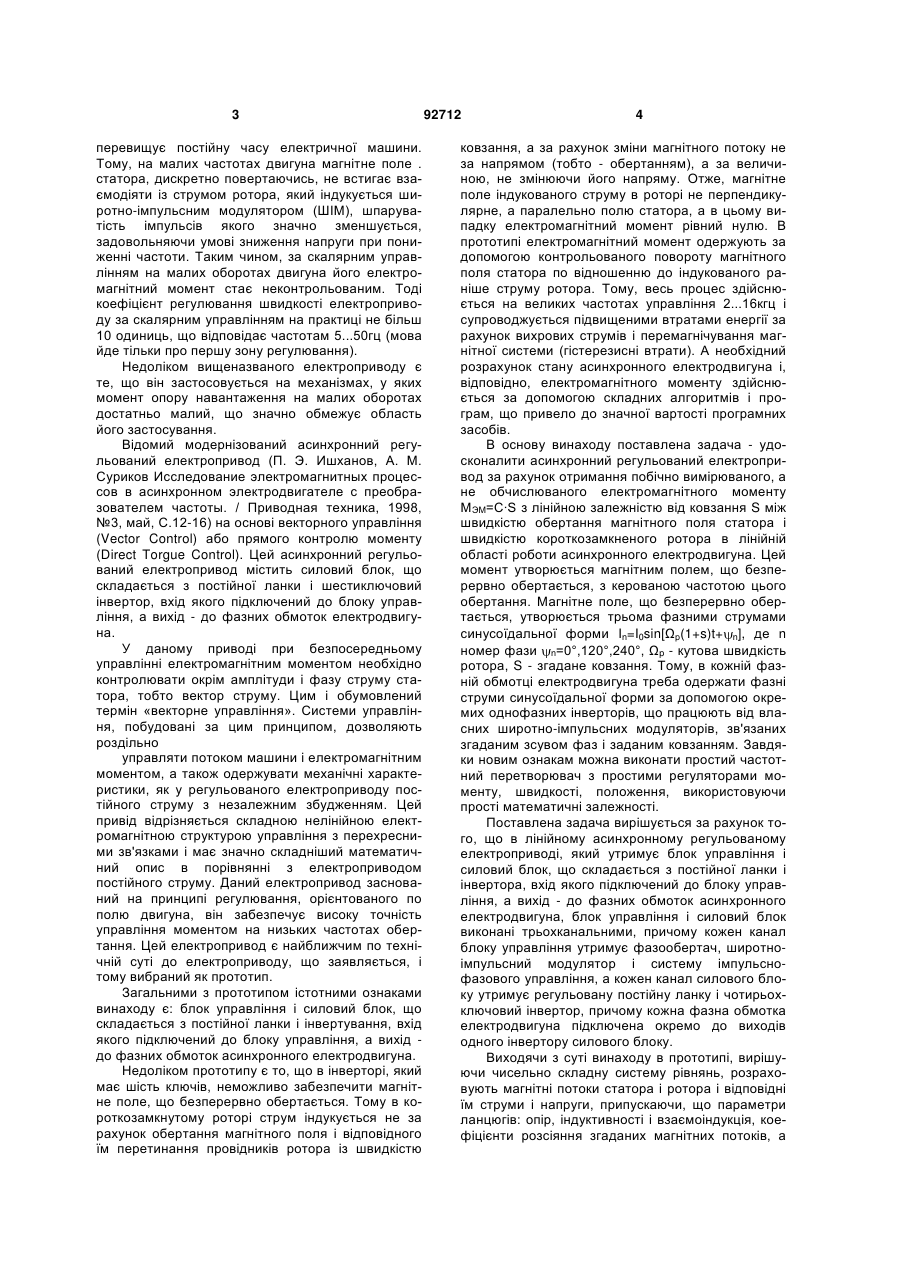
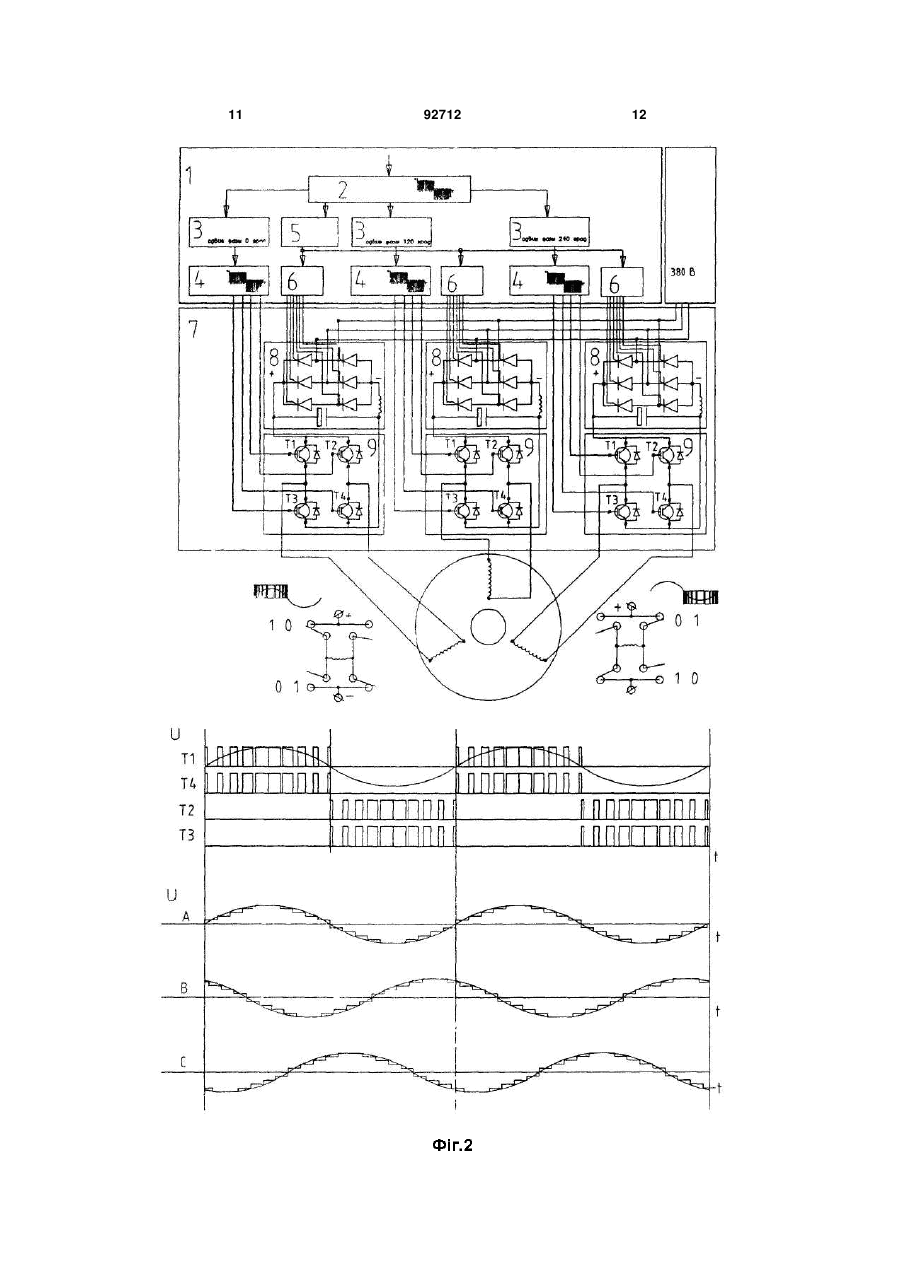
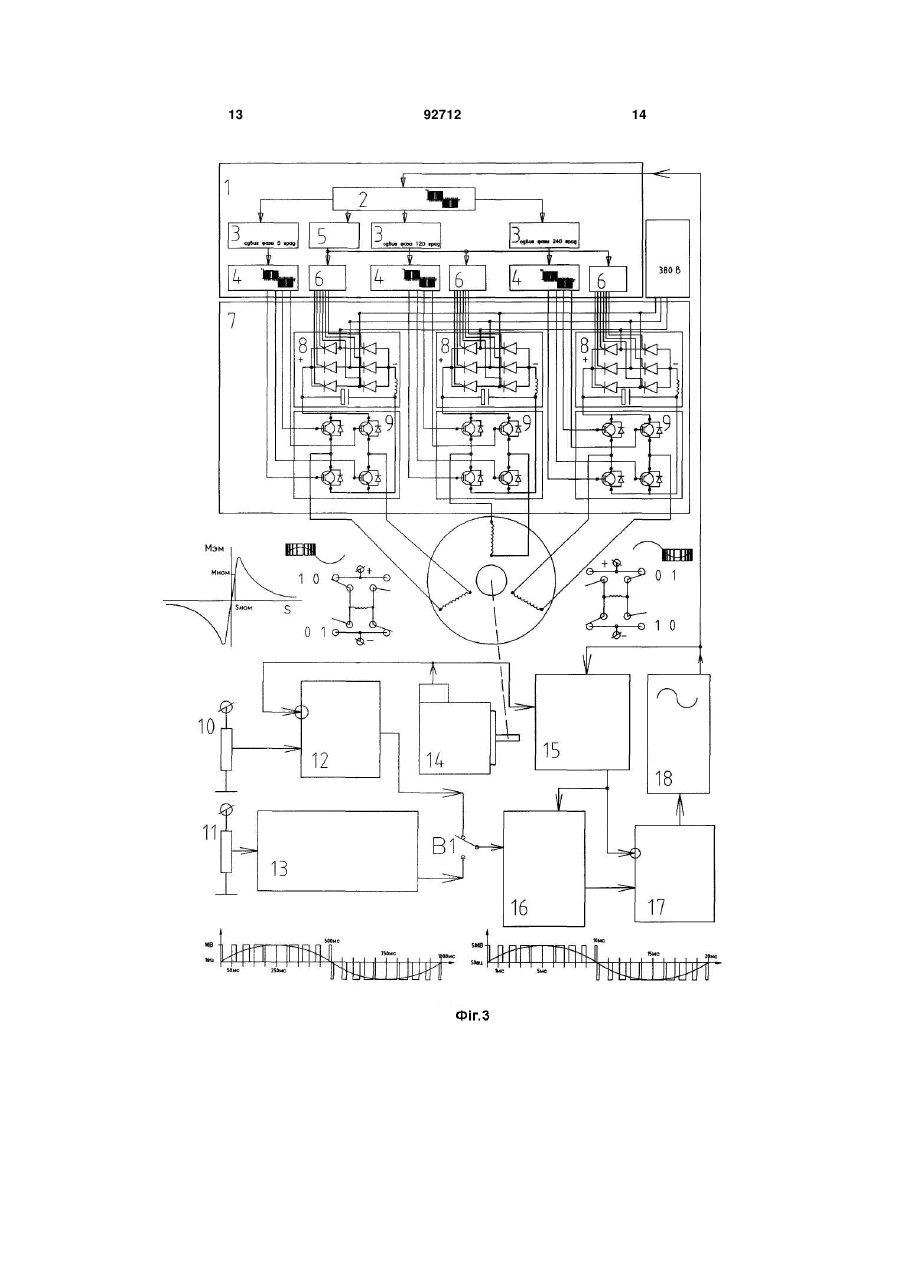
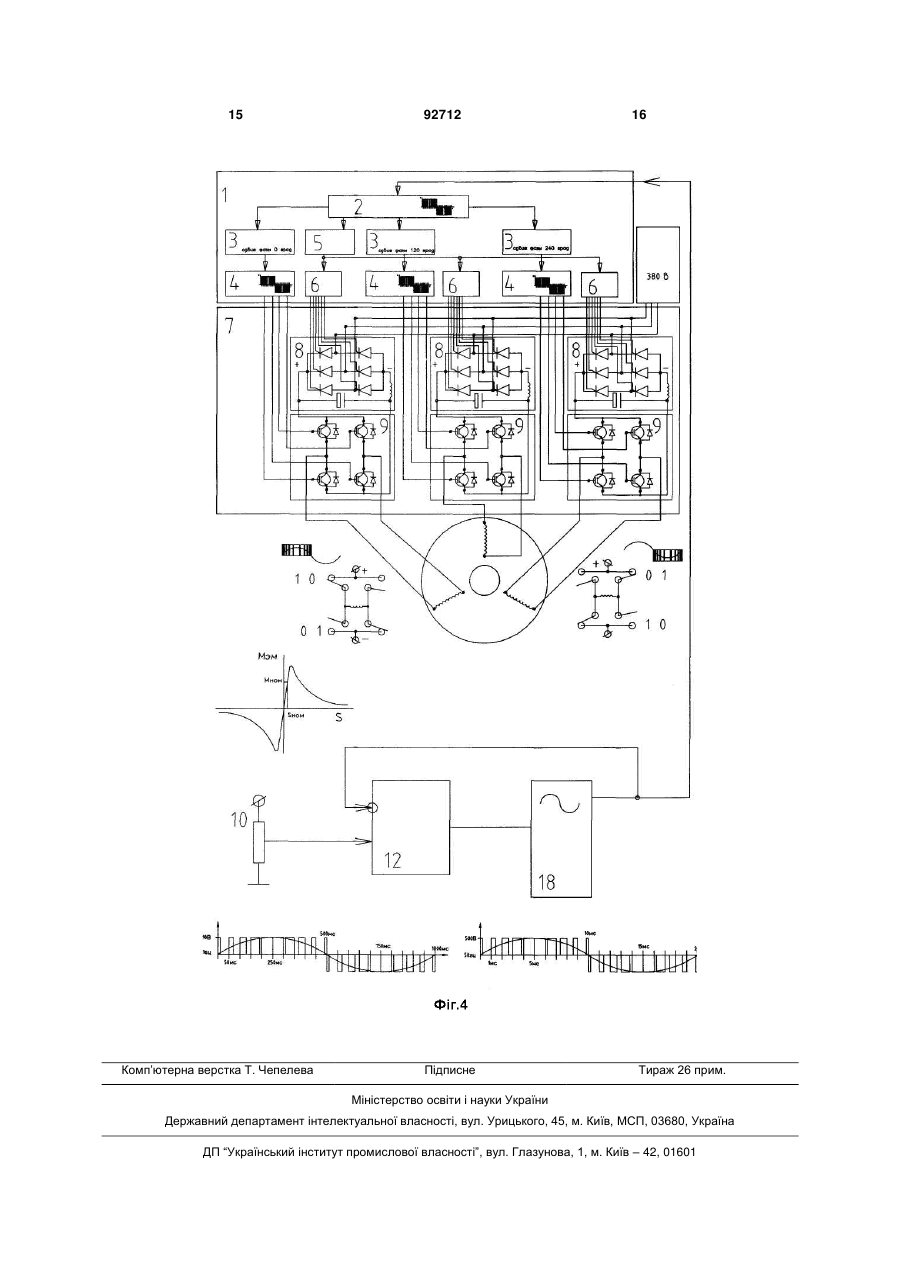
Лінійний асинхронний регульований електропривод, що містить блок управління і силовий блок, що складається з постійної ланки і інвертора, вхід якого підключений до блока управління, а вихід - до фазних обмоток асинхронного електродвигуна, який відрізняється тим, що блок управління і силовий блок виконані триканальними, причому кожен канал блока управління містить фазообертач, широтно-імпульсний модулятор і систему імпульсно-фазового управління, а кожен канал силового блока містить регульовану постійну ланку і чотириключовий інвертор, причому кожна фазна обмотка електродвигуна підключена окремо до виходів одного інвертора силового блока. (19) (21) a200901158 (22) 13.02.2009 (24) 25.11.2010 (46) 25.11.2010, Бюл.№ 22, 2010 р. (72) ЖУКОВА НАТАЛЯ ВІКТОРІВНА, ЛИТВИНОВ ВІКТОР ІВАНОВИЧ, ЛИТВИНОВА ТАІСІЯ СЕРАФИМІВНА (73) ЖУКОВА НАТАЛЯ ВІКТОРІВНА, ЛИТВИНОВ ВІКТОР ІВАНОВИЧ, ЛИТВИНОВА ТАІСІЯ СЕРАФИМІВНА (56) JP 2004248335 A, 02.09.2004 реферат JP 58019186 A, 04.02.1983 реферат US 3970914 A, 20.07.1976 весь документ RU 2289197 C1, 10.12.2006 весь документ EP 0087115 A1, 31.08.1983 реферат 3 перевищує постійну часу електричної машини. Тому, на малих частотах двигуна магнітне поле . статора, дискретно повертаючись, не встигає взаємодіяти із струмом ротора, який індукується широтно-імпульсним модулятором (ШІМ), шпаруватість імпульсів якого значно зменшується, задовольняючи умові зниження напруги при пониженні частоти. Таким чином, за скалярним управлінням на малих оборотах двигуна його електромагнітний момент стає неконтрольованим. Тоді коефіцієнт регулювання швидкості електроприводу за скалярним управлінням на практиці не більш 10 одиниць, що відповідає частотам 5...50гц (мова йде тільки про першу зону регулювання). Недоліком вищеназваного електроприводу є те, що він застосовується на механізмах, у яких момент опору навантаження на малих оборотах достатньо малий, що значно обмежує область його застосування. Відомий модернізований асинхронний регульований електропривод (П. Э. Ишханов, А. М. Суриков Исследование электромагнитных процессов в асинхронном электродвигателе с преобразователем частоты. / Приводная техника, 1998, №3, май, С.12-16) на основі векторного управління (Vector Control) або прямого контролю моменту (Direct Torgue Control). Цей асинхронний регульований електропривод містить силовий блок, що складається з постійної ланки і шестиключовий інвертор, вхід якого підключений до блоку управління, а вихід - до фазних обмоток електродвигуна. У даному приводі при безпосередньому управлінні електромагнітним моментом необхідно контролювати окрім амплітуди і фазу струму статора, тобто вектор струму. Цим і обумовлений термін «векторне управління». Системи управління, побудовані за цим принципом, дозволяють роздільно управляти потоком машини і електромагнітним моментом, а також одержувати механічні характеристики, як у регульованого електроприводу постійного струму з незалежним збудженням. Цей привід відрізняється складною нелінійною електромагнітною структурою управління з перехресними зв'язками і має значно складніший математичний опис в порівнянні з електроприводом постійного струму. Даний електропривод заснований на принципі регулювання, орієнтованого по полю двигуна, він забезпечує високу точність управління моментом на низьких частотах обертання. Цей електропривод є найближчим по технічній суті до електроприводу, що заявляється, і тому вибраний як прототип. Загальними з прототипом істотними ознаками винаходу є: блок управління і силовий блок, що складається з постійної ланки і інвертування, вхід якого підключений до блоку управління, а вихід до фазних обмоток асинхронного електродвигуна. Недоліком прототипу є то, що в інверторі, який має шість ключів, неможливо забезпечити магнітне поле, що безперервно обертається. Тому в короткозамкнутому роторі струм індукується не за рахунок обертання магнітного поля і відповідного їм перетинання провідників ротора із швидкістю 92712 4 ковзання, а за рахунок зміни магнітного потоку не за напрямом (тобто - обертанням), а за величиною, не змінюючи його напряму. Отже, магнітне поле індукованого струму в роторі не перпендикулярне, а паралельно полю статора, а в цьому випадку електромагнітний момент рівний нулю. В прототипі електромагнітний момент одержують за допомогою контрольованого повороту магнітного поля статора по відношенню до індукованого раніше струму ротора. Тому, весь процес здійснюється на великих частотах управління 2...16кгц і супроводжується підвищеними втратами енергії за рахунок вихрових струмів і перемагнічування магнітної системи (гістерезисні втрати). А необхідний розрахунок стану асинхронного електродвигуна і, відповідно, електромагнітного моменту здійснюється за допомогою складних алгоритмів і програм, що привело до значної вартості програмних засобів. В основу винаходу поставлена задача - удосконалити асинхронний регульований електропривод за рахунок отримання побічно вимірюваного, а не обчислюваного електромагнітного моменту МЭМ=C·S з лінійною залежністю від ковзання S між швидкістю обертання магнітного поля статора і швидкістю короткозамкненого ротора в лінійній області роботи асинхронного електродвигуна. Цей момент утворюється магнітним полем, що безперервно обертається, з керованою частотою цього обертання. Магнітне поле, що безперервно обертається, утворюється трьома фазними струмами синусоїдальної форми In=I0sin[Ωр(1+s)t+ n], де n номер фази n=0°,120°,240°, Ωp - кутова швидкість ротора, S - згадане ковзання. Тому, в кожній фазній обмотці електродвигуна треба одержати фазні струми синусоїдальної форми за допомогою окремих однофазних інверторів, що працюють від власних широтно-імпульсних модуляторів, зв'язаних згаданим зсувом фаз і заданим ковзанням. Завдяки новим ознакам можна виконати простий частотний перетворювач з простими регуляторами моменту, швидкості, положення, використовуючи прості математичні залежності. Поставлена задача вирішується за рахунок того, що в лінійному асинхронному регульованому електроприводі, який утримує блок управління і силовий блок, що складається з постійної ланки і інвертора, вхід якого підключений до блоку управління, а вихід - до фазних обмоток асинхронного електродвигуна, блок управління і силовий блок виконані трьохканальними, причому кожен канал блоку управління утримує фазообертач, широтноімпульсний модулятор і систему імпульснофазового управління, а кожен канал силового блоку утримує регульовану постійну ланку і чотирьохключовий інвертор, причому кожна фазна обмотка електродвигуна підключена окремо до виходів одного інвертору силового блоку. Виходячи з суті винаходу в прототипі, вирішуючи чисельно складну систему рівнянь, розраховують магнітні потоки статора і ротора і відповідні їм струми і напруги, припускаючи, що параметри ланцюгів: опір, індуктивності і взаємоіндукція, коефіцієнти розсіяння згаданих магнітних потоків, а 5 також момент інерції і момент опору навантаження - є відомі величини. Після рішення складної системи рівнянь через знайдені вектори магнітних потоків статора і ротора і кута між цими потоками розраховується (не вимірюється) електромагнітний момент. Абсолютне значення вектора магнітного потоку статора звичайно підтримується постійним, а електромагнітний момент регулюється зміною кута між векторами потокозчеплення ротора і статора. Використовуючи, що постійна часу роторного ланцюга стандартної асинхронної машини звичне більше 100мс, тому за допомогою системи управління встигають міняти напрям вектора потокозчеплення статора по відношенню до потокозчеплення ротора на заданий кут. Тобто, змінюючи кут між двома потокозчепленнями, можна ефективно управляти електромагнітним моментом асинхронного двигуна. Проте все це вимагає великих витрат на апаратні і програмні засоби. У прототипі, щоб індукувати струм в роторі, змінюють магнітний потік статора за абсолютною величиною. Тому виходить, що магнітне поле індукованого струму ротора орієнтується паралельно магнітному полю статора, а в цьому випадку електромагнітний момент рівний нулю. Природно тут необхідно встигнути повернути потокозчеплення статора на якийсь кут, щоб одержати відмінний від нуля електромагнітний момент. У технічному рішенні, що заявляється, використаний ефект перетинання магнітних силових ліній провідниками ротора за допомогою магнітного поля статора, що змінюється, тільки за напрямом, тобто поля статора, що обертається, але з можливістю зміни його частоти обертання. Тоді магнітне поле індукованого струму ротора буде завжди перпендикулярно магнітному полю статора. В цьому випадку електромагнітний момент максимальний і залежить лінійно тільки від ковзання або відносної різниці швидкості магнітного поля статора і швидкості ротора в межах 1,8 номінального навантаження, що практично завжди здійсниме. У пропонованому електроприводі це ковзання вимірюється за допомогою енкодеру і задаючого генератора частоти або кодування силових ключів інвертору. Тобто управляти об'єктом простіше і надійніше, оскільки основні параметри процесу вимірюються, а не обчислюються за допомогою складних математичних операцій. Щоб одержати поле статора, що безперервно обертається, з можливістю зміни його частоти обертання, необхідно для кожної фазової обмотки, розв'язаної з нейтралью, використовувати однофазний інвертор, який складається з чотирьох силових ключів. Локальний інвертор має свою постійну ланку, фазообертач, який змінює фазу синусоїдальної напруги заданої частоти на 0, 120 або 240 градусів, а також широтно-імпульсний модулятор, що формує синусоїдальний струм фазної обмотки статора. З метою зменшення переривистих струмів використовується регульована постійна ланка, яка виконана на тиристорах і забезпечує функцію постійного відношення напруги до його частоти U/f=const. Таким чином, формується магнітний потік статора постійної амплітуди і який 92712 6 обертається із заданою частотою, необхідною при регулюванні згаданого ковзання, а в свою чергу і електромагнітного моменту, пов'язаного з ковзанням константою - постійної машини. Чому це працює навіть на малих частотах перетворювача? Відомо, що ротор асинхронного двигуна, включеного безпосередньо в мережу 380В, в межах номінального навантаження, відстає від поля статора на 1...3%, що відповідає частоті індукційного струму в роторі не більш 1,5гц. І це реалізується завдяки тільки синусоїдальним формам фазних струмів, що породжують магнітне поле, що безперервно обертається, в робочому зазорі машини по відношенню до ротора двигуна. Отже, адекватне моделювання синусоїдальної напруги кожної фази треба здійснювати незалежно на локальному інверторі з чотирма ключами, що паралельно звільняє від складних розрахунків такого складного об'єкту, як асинхронний двигун. Пропонований електропривод пояснюється рисунками Фіг.1, Фіг.2, Фіг.3, Фіг.4. На Фіг.1 наведений силовий блок прототипу, а також діаграма сигналів управління і вихідні напруги шестиключового інвертору за активним навантаженням. Крім того, на Фіг.1 позначені шість робочих і два нейтральні положення ключів інвертору. На Фіг.2 наведені трьохканальні блок управління і силовий блок, підключений до асинхронного електродвигуна з розв'язаною нейтралью, а також діаграма сигналів управління і вихідні напруги чотирьохключового інвертору. На Фіг.2 також позначені робочі положення ключів однофазного інвертору. На Фіг.3 наведена функціональна блок-схема лінійного асинхронного регульованого електроприводу і діаграми фазних напруг при роботі ШІМ-а на різних частотах перетворювача, а також функціональна залежність електромагнітного моменту від ковзання, де присутня робоча лінійна ділянка, в рамках якої контролюється привод. На Фіг.4 наведена спрощена блок-схема лінійного асинхронного регульованого електроприводу без датчика швидкості. Лінійний асинхронний регульований електропривод (Фіг.3) містить блок управління 1, який включає три канали, кожен канал містить подільник періоду синусоїди 2, фазообертач 3, широтноімпульсний модулятор (ШІМ) 4, загальний регулятор напруги 5, підтримуючий відношення U/f=const, і систему імпульсно-фазового управління (СІФУ) 6. Силовий блок 7 також містить три канали, його кожен канал містить регульовану постійну ланку 8, з'єднану управляючими ланцюгами з СІФУ 6 і чотирьохключовий інвертор 9, вхід якого з'єднаний із ШІМ-ом 4, а вихід - з фазною обмоткою асинхронного електродвигуна. Верхній рівень управління з силовим блоком 7 і блоком управління 1 також містить задатчик швидкості 10 і задатчик електромагнітного моменту 11, які з'єднані відповідно з пропорційно -інтегральним регулятором (ПІрегулятором) швидкості 12 і обчислювачем ковзання 13. Енкодер 14 за зворотним зв'язком з'єднаний з інверсним входом ПІ-регулятора швидкості 12. Вхід дискримінатора поточного ковзання 15 7 сполучений з виходом енкодеру 14, а вихід дискримінатора 15 підключений до обмежувача завдання 16 і до інверсного входу зворотного зв'язку ПІ-регулятора електромагнітного моменту 17. Вихід регулятора 17 підключений до входу задаючого генератора частоти 18. Вихід генератора 18 підключений до блоку управління 1 і до входу зворотного зв'язку дискримінатора ковзання 15. Перемикач В1 переводить систему управління з режиму регулятора швидкості 12 в режим регулятора моменту 17. Верхній рівень управління (Фіг.4) без датчика швидкості (енкодеру) значно спрощується і регулювання швидкості ротора або його моменту перетворюється на регулятор частоти, де швидкість ротора не виходить за межі 1...3% ковзання по відношенню до швидкості поля статора, якщо момент навантаження не перевищує 1,8 її номіналу. На Фіг.4 позначення елементів функціональної схеми ті ж, що і на Фіг.3, тільки регулятор швидкості 12 перетворився на регулятор частоти. Запропонований електропривод працює таким чином. З метою спрощення програмних засобів асинхронного регульованого електроприводу, організують магнітне поле статора, що безперервно обертається із заданою частотою, за допомогою локальних інверторів. Як видно на Фіг.3, розв'язка інверторів потребує відповідну розв'язку постійних ланок, і нейтралі електродвигуна. Режим регулятора швидкості здійснюється у верхньому положенні перемикача В1. На задатчику 10 швидкості двигуна встановлюється необхідне її значення. ПІ-регулятор швидкості 12 аналізує відхилення заданої і поточної швидкості ротора двигуна за допомогою зворотного зв'язку від енкодеру 14. Підсилюючи і інтегруючи це відхилення, регулятор 12 видає відповідне завдання через обмежувач 16 на регулятор електромагнітного моменту 17. Задаючий генератор 18 синусоїдальних струмів обмоток статора генерує частоту керованої напруги за допомогою ПІ-регулятора 17 електромагнітного моменту. Ця частота відрізняється від частоти обертання ротора на задану величину ковзання S, поточний стан якої визначається дискримінатором 15, сполученим з датчиком швидкості ротора (енкодером) 14 і генератором 18. Дискримінатор ковзання 15 є зворотним зв'язком для ПІ-регулятора 17 електромагнітного моменту. Обмежувач завдання 16 обмежує зверху і знизу величину ковзання в межах лінійної залежності від цього ковзання електромагнітного моменту ΜЭМ=C·S. Сформована напруга генератора 18 поступає через подільник періоду синусоїди 2 на трьохканальний фазообертач 3 і широтноімпульсний модулятор 4. Кожен ШІМ 4 з'єднаний зі своїм чотирьохключовим інвертором 9. Його транзисторні ключі відкриваються відповідно за верхнім (10; 01) і нижнім (01; 10) кодами, за допомогою яких формується верхня і нижня частина фазного синусоїдального струму. Подільник 2 дробить по1 точний період T , де f частота генератора 18, f як мінімум на n=24 тактових імпульсів, що в чотири рази більш ніж у прототипу. Такий розподіл поточ 92712 8 ного періоду T=n· t, кратний дванадцяти одиницям, дозволяє достатньо точно змоделювати геометрію базової синусоїди, а також зсув фаз по відношенню один до одного. Цей зсув відповідаn 24 тиме ( 8 восьми одиницям тактових 3 3 імпульсів, що легко виконується. Тривалість робочих імпульсів, що становлять частину тактових імпульсів, формується в ШІМ-е 4 згідно функціональної залежності T 2 2 sin k 1 sin k , де n і k відпо2n n n відно, число розбиття періоду Τ і поточний номер коду k=(1...n) робочих імпульсів. З метою зменшення режиму переривистих струмів пропорційну залежність напруги від частоти реалізують за допомогою загального регулятора напруги 5, трьохканального СІФУ 6 і трьох тиристорних постійних ланок 8, наприклад, за принципом вертикального управління. Таким чином, на фазні обмотки подаються синусоїдальні струми, зміщені на 0, 120, 240 градусів, що достатнє для формування магнітного поля статора, що обертається, з поточною швидкістю, відмінною від швидкості ротора на величину ковзання, достатнього для подолання поточного навантаження, прикладеного до ротора двигуна. У зв'язку з тим, що локальні інвертори живляться від індивідуального джерела живлення, обмотки статора розв'язані з нейтралью, що легко реалізується. За нижнім положенням перемикача В1 система управління переводиться в режим регулятора моменту. Задатчик 11 електромагнітного моменту формує задаючий вплив цього моменту, пов'язаного з частотою поля статора, відмінної від частоти обертання ротора на величину ковзання MЭМ МЭМ=С·S. Обчислювач 13 за формулою S С визначає ковзання, яке шукається. Далі управління відбувається за вищеназваним алгоритмом. Запропонована система повинна бути обмежена знизу по відношенню до нульового ковзання. Для цього достатньо не опускати частоту поля нижче 0,5...1 герца. Зрозуміло, що точність установки малої швидкості ротора при навантаженнях відмінних від нуля від цього не постраждає, оскільки за повзучою скорістю його обертання нижче об величина ковзання для цього потрібна не 1 с більше 0,02. На Фіг.3 також показані дві діаграми фазних напруг на активному навантаженні при роботі ШІМ-а на частотах перетворювача 1гц і 50гц. З причини того, що реалізація функції U/f=const відбувається не в ШІМ-і, а в окремому тиристорному регуляторі напруги, графіки цих функцій за геометрією ідентичні. При цьому відношення U 500B 50гц 50мс 50, K виконуються за f 10B 1гц 1мс значним зменшенням режиму переривистих струмів, що позитивно впливає на формування синусо 9 їдальної форми фазних струмів, а також на зменшення втрати енергії на тепло. Таким чином, за допомогою простих апаратних засобів і алгоритму, що не вимагає рішення складних систем диференціальних рівнянь, можна реалізувати регульований асинхронний електроп 92712 10 ривод з контролем електромагнітного моменту. Запропонована система швидкість-момент легко адаптується в одноступінчатий регулятор електромагнітного моменту, а також цю систему можна використовувати в структурі положення-момент. 11 92712 12 13 92712 14 15 Комп’ютерна верстка Т. Чепелева 92712 Підписне 16 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLinear asynchronous regulated electric drive
Автори англійськоюZhukova Nataliia Viktorovna, Litvinov Biktor Ivanovych, Lytvynova Taisiia Serafymivna
Назва патенту російськоюЛинейный асинхронный регулированный электропривод
Автори російськоюЖукова Наталия Викторовна, Литвинов Виктор Иванович, Литвинова Таисия Серафимовна
МПК / Мітки
МПК: H02P 9/00
Мітки: електропривод, асинхронний, лінійний, регульованій
Код посилання
<a href="https://ua.patents.su/8-92712-linijjnijj-asinkhronnijj-regulovanijj-elektroprivod.html" target="_blank" rel="follow" title="База патентів України">Лінійний асинхронний регульований електропривод</a>
Лінійний асинхронний двигун-насос
Номер патенту: 17633
Опубліковано: 06.05.1997
Автори: Рихлевич Ігор Михайлович, Старков Олексій Анатолійович, Карпінець Богдан Іванович, Ковбаснюк Андрій Михайлович
МПК: H02K 41/025
Мітки: асинхронний, лінійний, двигун-насос
Формула / Реферат:
Лінійний асинхронний двигун-насос, виконаний у вигляді циліндра, в якому розміщені статор з багатофазною обмоткою І рухомий якір-плунжер та відокремлений від магнітопроводу магнітним екраном пристрій для контролю кінцевих положень, який відрізняється тим, що багатофазна обмотка укладена в пазах на зовнішній стороні статора, на його внутрішній стороні вмонтовані направляючі, і кільцевий простір між якір-плунжером та внутрішньою поверхнею...
Регульований асинхронний електропривід з синхронним обертанням роторів
Номер патенту: 83629
Опубліковано: 11.08.2008
Автори: Шевченко Іван Степанович, Калюжний Сергій Володимирович, Калюжний Володимир Владиславович
МПК: H02P 5/74
Мітки: регульованій, сінхронним, асинхронний, роторів, електропривід, обертанням
Формула / Реферат:
Регульований асинхронний електропривід з синхронним обертанням роторів, до складу якого входять електродвигуни, параметричне джерело струму, мостові випрямлячі та комутуючий елемент у вигляді резистора або інвертора, веденого живильною мережею, який відрізняється тим, що фазні обмотки роторів електродвигунів з'єднані між собою пофазно-паралельно та зі входом змінного струму мостового випрямляча, вихід постійного струму якого зв'язаний...
Частотно-регульований асинхроний електропривод
Номер патенту: 8583
Опубліковано: 30.09.1996
Автори: Епштейн Ісаак Ізраільович, Бару Олександр Юріьович
МПК: H02P 27/04
Мітки: частотно-регульований, електропривод, асинхроний
Формула / Реферат:
1. Частотно-регулируемый асинхронный электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к преобразователю частоты, составленному из последовательно соединенных управляемого выпрямителя, дросселя и автономного инвертора тока, систему управления инвертором, снабженную двумя группами входов и подключенную выходами к входам управления автономного инвертора тока, датчики фазных...
Асинхронний мотор-вентилятор
Номер патенту: 30333
Опубліковано: 25.02.2008
Автор: Захарчук Ігор Олександрович
МПК: H02K 7/14
Мітки: асинхронний, мотор-вентилятор
Формула / Реферат:
Асинхронний мотор-вентилятор, що містить статор з обмоткою і магнітопроводом, жорстко сполученим з основою втулкою, яка несе опорні підшипники, вал, сполучений з ротором за допомогою торцевого щита, ротор складено з колеса з лопатями, який відрізняється тим, що статор виготовлено двопакетним, в пазах пакетів укладено одну обмотку статора, ротор виготовлено двопакетним, кожен пакет ротора містить обмотку зі стрижнями і кільцями, що замикають...
Лінійний електропривод

Номер патенту: 43207
Опубліковано: 10.08.2009
Автори: Барабаш В'ячеслав Андрійович, Богаєнко Микола Володимирович, Попков Володимир Сергійович, Смірнов Юрій Йосипович, Чернишов Сергій Іванович
МПК: H02K 41/00, H01H 31/00, B25J 9/12
Мітки: електропривод, лінійний
Формула / Реферат:
Лінійний електропривод, що має нерухому частину, яка складається зі струмового шару, обхопленого зовнішнім магнітопроводом, встановлених в корпусі, і рухому, змонтовану всередині нерухомої частини з можливістю зворотно-поступального руху, з вузлами фіксації крайніх положень, нерухомі елементи яких змонтовані на торцях корпусу, а рухомі - на рухомій частині, який відрізняється тим, що між зовнішнім магнітопроводом і корпусом встановлено...
Попередній патент: Робота з роз’єднаним і спільним каналом передачі даних в системі безпровідного зв’язку
Наступний патент: Транспортна машина
Випадковий патент: Спосіб діагностики розвитку атеросклерозу