Шпиндельний вузол верстата
Номер патенту: 95295
Опубліковано: 25.12.2014
Автори: Олійник Катерина Олександрівна, Ченчевая Ольга Олександрівна, Саленко Олександр Федорович, Кузнєцов Юрій Миколайович, Гайдаєнко Юрій Васильович

Формула / Реферат
1. Шпиндельний вузол верстата, що містить корпус з рухомим шпинделем і затискним пристроєм попереду, піноль, розташований в передній частині корпуса, статор обертової електричної машини головного руху шпинделя з розподіленою обмоткою, який закріплений всередині пінолю, ротор, жорстко сполучений зі шпинделем, і електропривод подачі, рухомий елемент якого розташований співвісно зі шпинделем і гвинтовою передачею, який відрізняється тим, що шпиндель на передньому кінці має засіб для кріплення інструмента, а на протилежному - виконану гвинтову поверхню, при цьому всередині корпусу, за пінолем, змонтований статор електроприводу подачі з обмоткою, а ротор електроприводу подачі жорстко сполучений із гайкою, яка має внутрішню гвинтову поверхню, при цьому осі роторів головного руху та руху подачі і, відповідно, шпинделя та гайки співпадають, а гвинтова поверхня шпинделя сполучена із гвинтовою поверхнею гайки, утворюючи з нею рухоме з'єднання типу гвинт-гайка, при цьому з вихідним торцем шпинделя та з торцем гайки сполучені датчики кутів поворотів, які у свою чергу, підключені до системи керування і контролюють кути повороту шпинделя та гайки, а система керування сполучена вихідними ланцюгами із клемами обмоток статорів приводів головного руху та руху подачі.
2. Шпиндельний вузол верстата за п. 1, який відрізняється тим, що піноль осьового переміщення із засобом кріплення інструменту на робочому торці може бути виконаний всередині пустотілого шпинделя, який надає пінолю обертовий рух, а його різьбовий кінець сполучений з гайкою ротора електроприводу подачі, при цьому статор обертової електричної машини головного руху шпинделя та статор електроприводу подачі розташовані співвісно і нерухомо один відносно іншого.
Текст
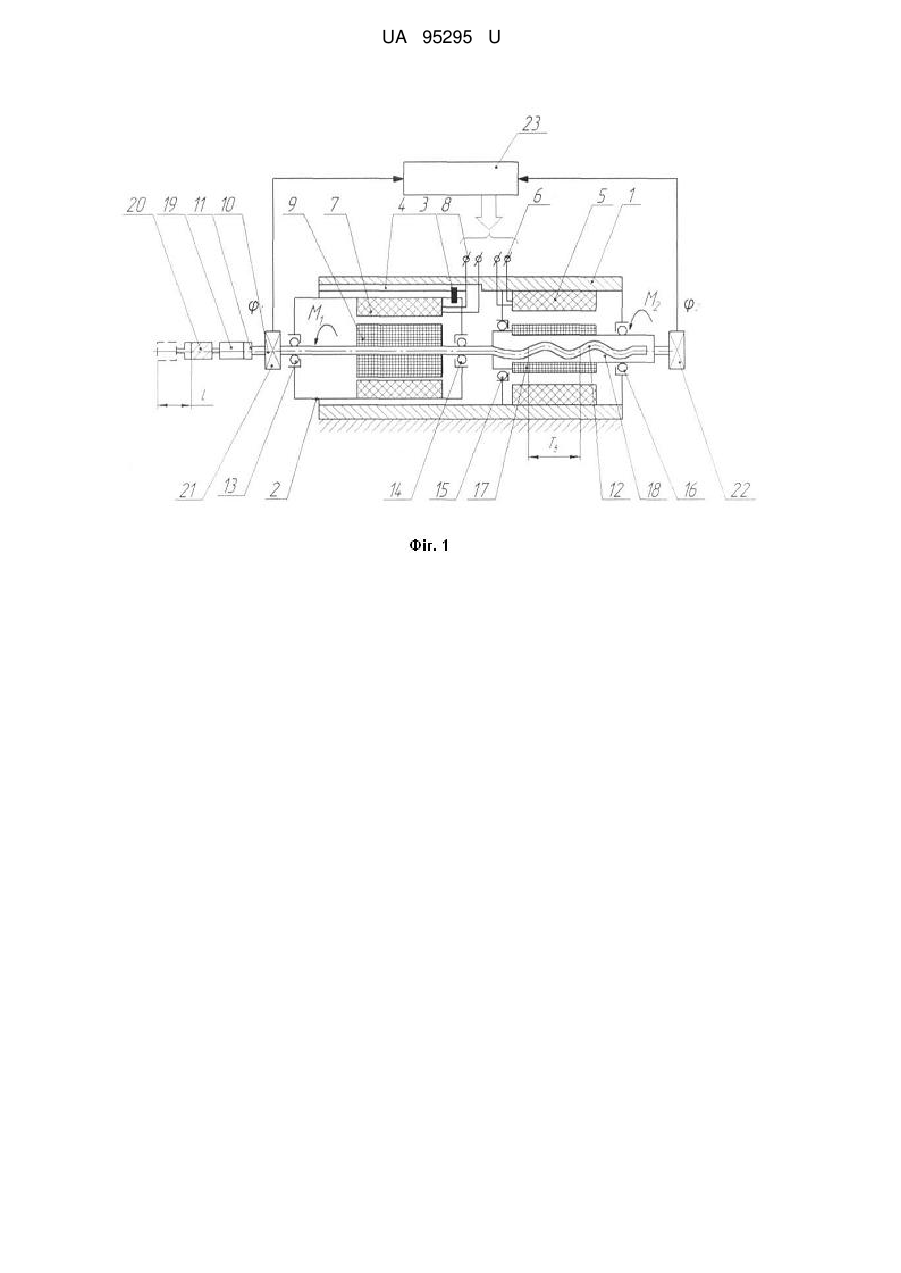
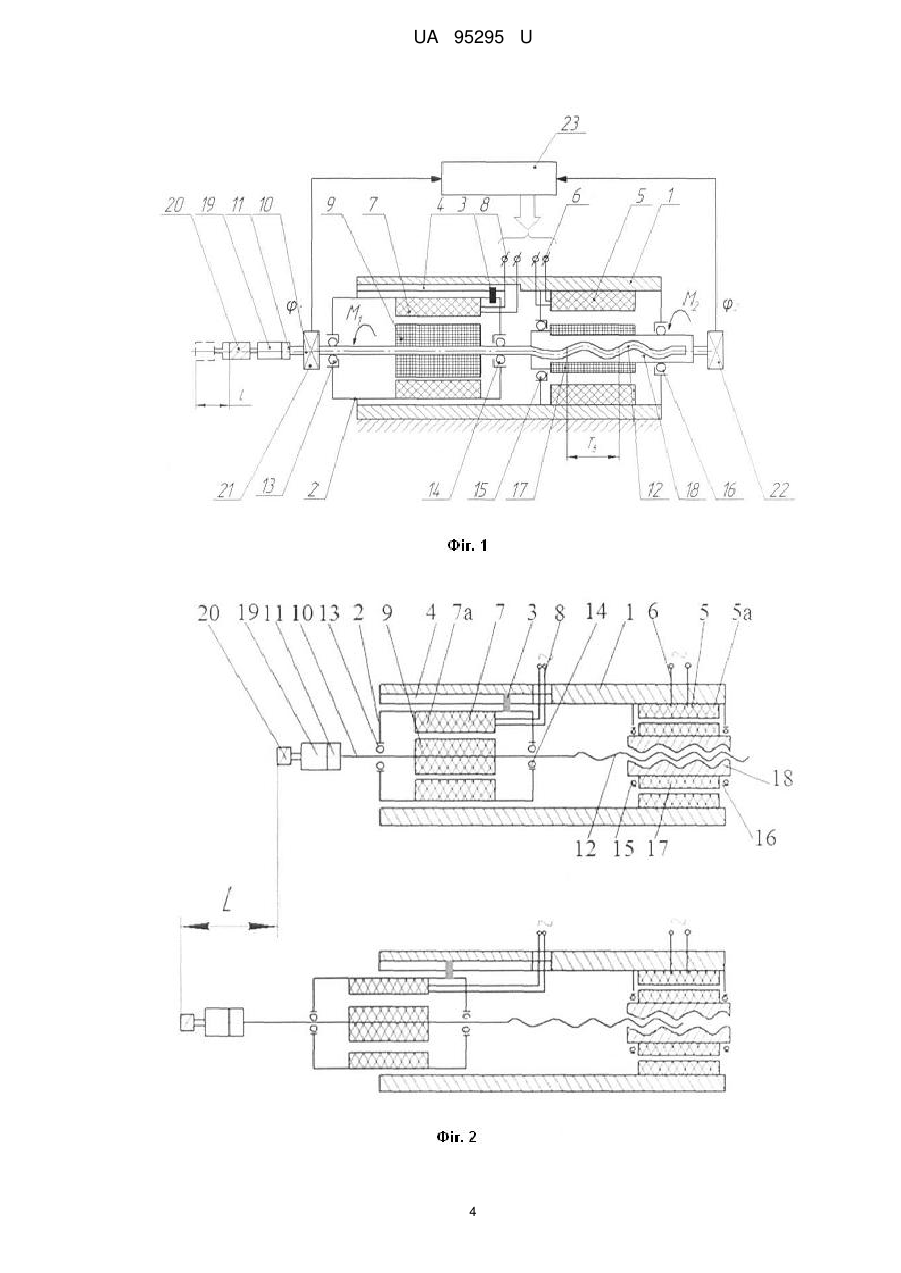
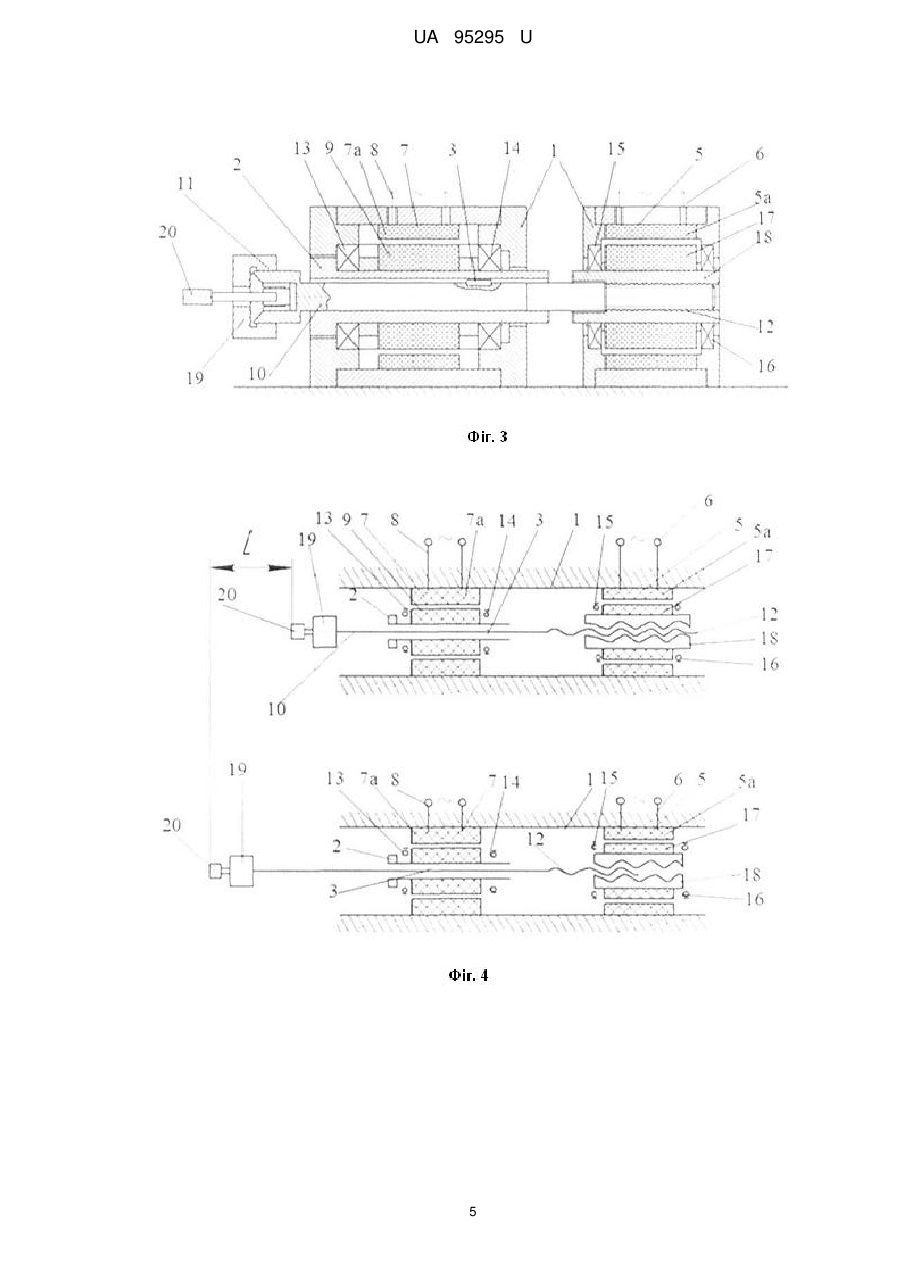
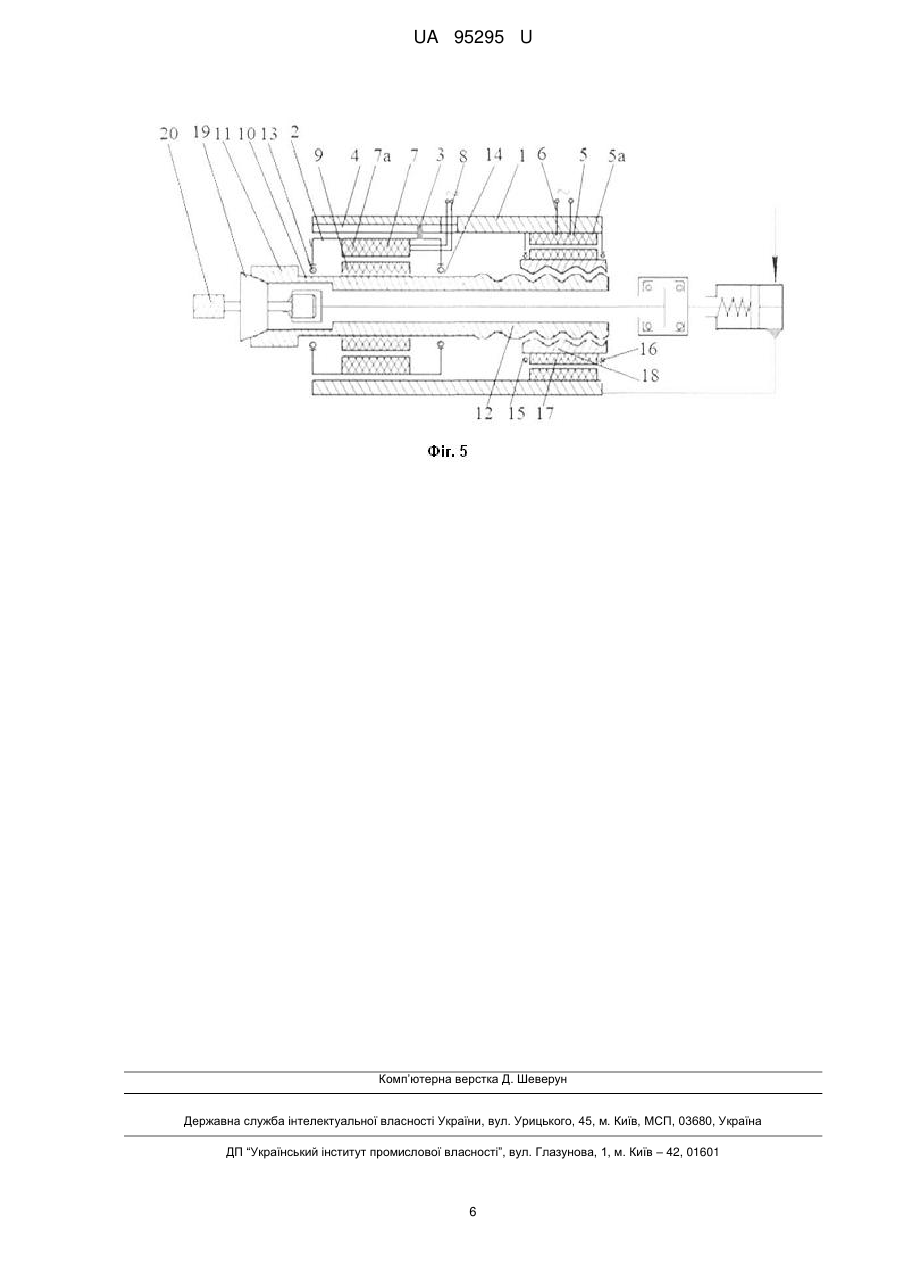
Реферат: Шпиндельний вузол верстата містить корпус з рухомим шпинделем і затискним пристроєм попереду, піноль, статор обертової електричної машини головного руху шпинделя з розподіленою обмоткою, ротор, жорстко сполучений зі шпинделем, і електропривод подачі. Шпиндель на передньому кінці має засіб для кріплення інструмента, а на протилежному – виконану гвинтову поверхню. При цьому всередині корпусу, за пінолем, змонтований статор електроприводу подачі з обмоткою, а ротор електроприводу подачі жорстко сполучений із гайкою, яка має внутрішню гвинтову поверхню. Осі роторів головного руху та руху подачі і, відповідно, шпинделя та гайки співпадають, а гвинтова поверхня шпинделя сполучена із гвинтовою поверхнею гайки, утворюючи з нею рухоме з'єднання типу гвинт-гайка. З вихідним торцем шпинделя та з торцем гайки сполучені датчики кутів поворотів, які у свою чергу, підключені до системи керування і контролюють кути повороту шпинделя та гайки, а система керування сполучена вихідними ланцюгами із клемами обмоток статорів приводів головного руху та руху подачі. UA 95295 U (12) UA 95295 U UA 95295 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі верстатобудування і може бути використана в металорізальних верстатах для надання різальному осьовому інструменту обертового головного руху та поступового руху подачі уздовж осі. Відомий шпиндельний вузол верстата, використовуваний, наприклад, у свердлувальних верстатах [1], що містить механізми подачі діамагнітної заготовки, виконаний у вигляді з'єднаного із шпинделем соленоїда з регульованою у функції переміщення тяговою характеристикою. Недоліком цього шпиндельного вузла є відсутність дискретної подачі інструмента, що унеможливлює використання у верстатах з ЧПК і не забезпечує якість обробки деталей. Відомі також шпиндельні вузли з приводом головного руху у вигляді мотор-шпинделя (див., наприклад, модель HF 120.2A32 фірми IBAG [2]), що містить корпус, окремі частини якого з'єднані між собою за допомогою гвинтів, вала, що одночасно є валом електродвигуна і шпинделя з опорами і механізмом затиску інструмента, статора, вмонтованого в корпус моторшпинделя, та напресованого ротора. Недоліком мотор-шпинделя є відсутність приводу подачі, що обмежує функціональні та технологічні можливості і потребує використання додаткового неспіввісного привода подач. Найближчим аналогом є шпиндельний вузол верстата [3], що містить привод головного руху шпинделя всередині пінолю та використовує електропривод подачі, виконаний співвісно з гвинтовою передачею. Головним недоліком даного шпиндельного вузла є те, що гвинтова передача надає рух не безпосередньо шпинделю, а пінолю, що призводить до перекосу пінолю в корпусі при русі, обмежує величину подачі інструмента та осьову силу різання, і, як наслідок, зменшує продуктивність обробки. В основу корисної моделі поставлена задача удосконалення шпиндельного вузла шляхом використання електроприводу подачі, сполученого рухомим з'єднанням безпосередньо з гвинтовою поверхнею шпинделя, що дозволяє досягти нових технічних результатів - розширення технологічних можливостей, підвищення продуктивності обробки при зменшенні затрат та матеріалів на виготовлення за рахунок спрощення конструкції. Поставлена задача вирішується тим, шпиндельний вузол верстата, що містить корпус з рухомим шпинделем і затискним пристроєм попереду, піноль, розташований в передній частині корпуса, статор обертової електричної машини головного руху шпинделя з розподіленою обмоткою, який закріплений всередині пінолю, ротор жорстко сполучений зі шпинделем і електропривод подачі, рухомий елемент якого розташований співвісно зі шпинделем і гвинтовою передачею, згідно з корисною моделлю, шпиндель виконаний у вигляді вала, на передньому кінці має засіб для кріплення інструмента, а на протилежному – виконану гвинтову поверхню, при цьому всередині корпусу, за пінолем, змонтований статор електроприводу подачі з обмоткою, а ротор електроприводу подачі жорстко сполучений із гайкою, яка має внутрішню гвинтову поверхню, при цьому осі роторів головного руху та руху подачі і, відповідно, шпинделя та гайки співпадають, а гвинтова поверхня шпинделя сполучена із гвинтовою поверхнею гайки, утворюючи з нею рухоме з'єднання типу гвинт-гайка, при цьому з вихідним торцем шпинделя та з торцем гайки сполучені датчики кутів поворотів, які у свою чергу, підключені до системи керування і контролюють кути повороту шпинделя та гайки, а система керування сполучена вихідними ланцюгами із клемами обмоток статорів приводів головного руху та руху подачі. При цьому рух подачі забезпечується розузгодженням крутних моментів роторів головного руху та руху подачі, і відповідно, розузгодженням кутів повороту на сполучених елементах пари гвинт-гайка. Згідно з корисною моделлю, піноль осьового переміщення із засобом кріплення інструменту на робочому торці може бути виконаний всередині пустотілого шпинделя, який надає пінолю обертовий рух, а його різьбовий кінець сполучений з гайкою ротора електроприводу подачі, при цьому статор обертової електричної машини головного руху шпинделя та статор електроприводу подачі розташовані співвісно і нерухомо один відносно іншого. Статорна обмотки електроприводу головного руху може бути змонтована всередині корпусу, а роторна - на поверхні пінолю, причому піноль зафіксований від можливого повороту відносно шпинделя штифтом, розміщеним на поверхні шпинделя, що контактує з прямолінійним напрямним пазом, розташованим на пінолю (варіант 2). Шпиндель може бути виконаний у вигляді порожнистого вала, всередині якого розміщується система дистанційного затиску патрона, наприклад, гідравлічного або електромагнітного типу (варіант 3). 1 UA 95295 U 5 10 15 20 25 30 35 40 45 50 55 60 Сполучення відомих елементів - корпусу з рухомим шпинделем і затискним пристроєм попереду пінолю, розташованого в передній частині корпуса, статора обертової електричної машини головного руху шпинделя з розподіленою обмоткою, закріпленого всередині пінолю, ротора, жорстко сполученого зі шпинделем, з електроприводом подачі у вигляді додаткового статора електричної машини, сполученого із корпусом та встановленим співвісно шпинделю і ротора, що взаємодіє через з'єднання "гвинт-гайка" із пінолем, веде до набуття пропонованим рішенням нових технічних властивостей - можливості виконувати рух подачі при виникненні різниці в кутових швидкостях двох роторів, який контролюється відповідною системою керування; при цьому співвісне виконання електроприводу позбавляє від перекосів шпиндель і дозволяє підвищити сили і подачі різання; відсутність зайвих зубчастих та інших передач зменшує також витрати на виготовлення, підвищує точність та веде до економії матеріалів, внаслідок чого досягається технічний результат - розширення технологічних можливостей, підвищення продуктивності обробки при зменшенні затрат і матеріалів на виготовлення за рахунок спрощення конструкції. Суть корисної моделі пояснюється кресленнями, де зображено: фіг. 1 - принципова кінематична схема шпиндельного вузла по варіанту 1; фіг. 2 - переміщення робочого інструмента при русі подачі в принциповій кінематичній схемі шпиндельного вузла по варіанту 1; фіг. 3 - конструкція шпиндельного вузла по варіанту 2; фіг. 4 - переміщення робочого інструмента при русі подачі в принциповій кінематичній схемі шпиндельного вузла по варіанту 2; фіг. 5 - принципова кінематична схема шпиндельного вузла по варіанту 3. Пристрій (шпиндельний вузол верстата) складається з корпусу 1 (фіг. 1), в якому, з одного боку, з можливістю повздовжнього руху уздовж центральної осі, виконаний піноль 2, зафіксований від можливого повороту штифтом 3, що контактує з прямолінійним напрямним пазом 4, розташованим на корпусі 1. За рухомим пінолем 2 змонтований статор 5 електроприводу головного руху з обмоткою 5а із клемами для підведення струму 6 так, що осі пінолю 2 та обмотки 5а співпадають. У внутрішній порожнині пінолю 2 нерухомо змонтований статор 7 електроприводу руху подачі з обмоткою 7а із клемами для підведення струму 8, всередині якого встановлений ротор 9, нерухомо сполучений із шпинделем 10, виконаним у вигляді вала, один із торців якого має фланець для кріплення 11, а на іншому кінці виконана гвинтова поверхня 12. Для забезпечення обертового руху шпиндель 10 змонтований на упорно-радіальних опорах (підшипниках) 13 та 14, встановлених у піноль 2. Концентрично до статора 5 на радіально-упорних опорах (підшипниках) 15 та 16, змонтованих у корпусі 1, розмішений ротор 17, нерухомо сполучений із гайкою 18, причому осі роторів 17 та 9 і, відповідно, шпинделя 10 та гайки 18 співпадають, а гвинтова поверхня 12 шпинделя 10 сполучена із гвинтовою поверхнею гайки 18, утворюючи з нею рухоме з'єднання типу "гвинт-гайка". На фланці 11 змонтований затискний пристрій 19, в якому закріплений інструмент 20. З вихідним торцем шпинделя 10 та з торцем гайки 18 сполучені датчики кутів поворотів 21 та 22 відповідно, які, у свою чергу, підключені до системи керування 23 і контролюють кути повороту φ1 шпинделя 10 та φ2 гайки 18. Система керування 23 також сполучена вихідними ланцюгами із клемами 6 та 8, і разом із датчиками кутових положень 21 та 22 утворює замкнену електромеханічну систему. Пристрій працює наступним чином. У початковий момент часу піноль 2 разом зі змонтованим у ньому індуктором 7, та встановленим на опорах 13, і 14 шпинделем 10, який жорстко сполучений із ротором 9 та контактує своєю гвинтовою поверхнею 12 із відповідною гвинтовою поверхнею гайки 18, встановленій на опорах 15 та 16, знаходиться в крайньому правому положенні, тобто у стані, коли піноль 2 повністю засунутий в корпус 1, а гвинтовий кінець шпинделя 12 загвинчений у відповідну різьбу гайки 18. Після подачі від системи керування 23 керуючого струму через клеми 6 та 8 на обмотки 5а та 7а, магнітні поля, що виникають, взаємодіють із роторами 9 і 17 відповідно, і прочинають розкручувати ротори 9 і 17, сполучені зі шпинделем 10, встановленим на радіально-упорні опори 13 і 14, та гайкою, встановленою на радіально-упорні опори 15 і 16 відповідно. Від провертання у цей час піноль 2 обмежений штифтом 3, що контактує із прямолінійним напрямним пазом 4, виконаним на корпусі 1. При цьому магнітне поле статора 7 забезпечує створення крутного моменту М1 на роторі 9 і, відповідно, на шпинделі 10, який через фланцевий кінець 11 надається затискному пристрою 19 та від нього - інструменту 20, а поле статора 5 створює момент М2, який необхідний для подолання сил опору руху та для підтримки такого відносного положення шпинделя 10 і гайки 18, при якому розузгодження моментів М1 та 2 UA 95295 U 5 10 М2 відсутнє і кут δ=φ2-φ1 дорівнює 0. Відповідні кути повороту шпинделя 10 (φι) та гайки 18 (φ2) контролюються датчиками кутів поворотів 21 та 22, відповідно, сполученими з системою керування 23. При необхідності надання робочому інструменту 20 руху поздовжньої подачі система керування 23 змінює струм, що надходить до обмоток 7а та 5а через клеми 8 та 6 так, щоб виникло розузгодження моментів М1 та М2 і кут δ=φ2-φ1 був відмінним від нуля. При цьому виникатиме відносний рух шпинделя 10 та гайки 18, внаслідок чого гвинтовий кінець 12 почне вигвинчуватися з гвинтової поверхні гайки 18 і через радіально-упорні групи опор 13, 14 та 15, 16 передавати зусилля подачі на піноль 2, викликаючи його переміщення уздовж осі з корпусу 1 (фіг. 2). При цьому інструмент отримає переміщення на величину L, мм, яка визначається кроком гвинта Т, мм, та залежить від кута δ: L 15 20 25 30 T , 2 де δ=φ2-φ1, рад. Для повернення пінолю 2 шпинделя 10 у початковий стан система керування 23 створює від'ємне розузгодження моментів Μ1 та М2, внаслідок чого гвинтовий кінець 12 шпинделя 10 загвинчується у гайку 18. Подача струму на обмотки 5а та 7а за певними законами дозволяє забезпечити не тільки обертовий (головний) рух різального інструмента 20, а й надати йому рух поздовжньої подачі, яка може бути формоутворюючою (коли здійснюється плавно на певну відстань), коригуючою (наприклад, компенсація зношування інструмента та зменшення його вильоту) або допоміжною - пульсуючою, імпульсною для забезпечення стружколамання, покращення умов роботи інструмента, гасіння проявів динамічної несталості при роботі шпиндельного вузла. Конструктивно шпиндельний вузол верстата може бути виконаний у варіанті 2, поданому на фіг. 3, або варіанті 3, поданому на фіг. 5. При цьому робота шпиндельних вузлів аналогічна роботі розглянутого вище шпиндельного вузла, фіг. 4. Джерела інформації: 1. А.с. СССР № 601124. Шпиндельный узел станка /МПК В23 Q 5/22, заяв. 24.04.72, опубл. 05.04.78, Бюл. № 13. 2. Кузнецов Ю.Н., Дмитриев Д.Α., Диневич Д.Е. компоновка станков с механізмами параллельной структуры (под. ред. Ю.Н. Кузнецова. с-с Херсон: ПП Вишемирский B.C., 2010. 417 с. (рис. 7.17, стр. 399-401). 3. Патент України на корисну модель № 65488. Шпиндельний вузол верстата. Кузнецов Ю.М., Фіранський В.Б., Шинкаренко В.Φ., Гайдаєнко Ю.В. /МПК В23В 47/00, заявл. 04.05.2010, опубл. 12.12.2011, Бюл. № 23, 2011 р. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 1. Шпиндельний вузол верстата, що містить корпус з рухомим шпинделем і затискним пристроєм попереду, піноль, розташований в передній частині корпуса, статор обертової електричної машини головного руху шпинделя з розподіленою обмоткою, який закріплений всередині пінолю, ротор, жорстко сполучений зі шпинделем, і електропривод подачі, рухомий елемент якого розташований співвісно зі шпинделем і гвинтовою передачею, який відрізняється тим, що шпиндель на передньому кінці має засіб для кріплення інструмента, а на протилежному - виконану гвинтову поверхню, при цьому всередині корпусу, за пінолем, змонтований статор електроприводу подачі з обмоткою, а ротор електроприводу подачі жорстко сполучений із гайкою, яка має внутрішню гвинтову поверхню, при цьому осі роторів головного руху та руху подачі і, відповідно, шпинделя та гайки співпадають, а гвинтова поверхня шпинделя сполучена із гвинтовою поверхнею гайки, утворюючи з нею рухоме з'єднання типу гвинт-гайка, при цьому з вихідним торцем шпинделя та з торцем гайки сполучені датчики кутів поворотів, які у свою чергу, підключені до системи керування і контролюють кути повороту шпинделя та гайки, а система керування сполучена вихідними ланцюгами із клемами обмоток статорів приводів головного руху та руху подачі. 2. Шпиндельний вузол верстата за п. 1, який відрізняється тим, що піноль осьового переміщення із засобом кріплення інструменту на робочому торці може бути виконаний всередині пустотілого шпинделя, який надає пінолю обертовий рух, а його різьбовий кінець сполучений з гайкою ротора електроприводу подачі, при цьому статор обертової електричної машини головного руху шпинделя та статор електроприводу подачі розташовані співвісно і нерухомо один відносно іншого. 3 UA 95295 U 4 UA 95295 U 5 UA 95295 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюSalenko Oleksandr Fedorovych, Kuznietsov Yurii Mykolaiovych, Oliinyk Kateryna Oleksandrivna, Haidaienko Yurii Vasyliovych
Автори російськоюСаленко Александр Федорович, Кузнецов Юрий Николаевич, Олийник Екатерина Александровна, Гайдаенко Юрий Васильевич
МПК / Мітки
МПК: B23B 19/00, B23B 47/00
Мітки: шпіндельний, вузол, верстата
Код посилання
<a href="https://ua.patents.su/8-95295-shpindelnijj-vuzol-verstata.html" target="_blank" rel="follow" title="База патентів України">Шпиндельний вузол верстата</a>
Шпиндельний вузол верстата
Номер патенту: 65488
Опубліковано: 12.12.2011
Автори: Шинкаренко Василь Федорович, Фіранський Володимир Борисович, Гайдаєнко Юрій Васильович, Кузнєцов Юрій Миколайович
МПК: B23B 19/00, B23B 47/00
Мітки: вузол, шпіндельний, верстата
Формула / Реферат:
1. Шпиндельний вузол верстата, що містить привод головного руху шпинделя, з'єднаний з електроприводом подачі піноль, гвинтову передачу, гвинт якої розміщений всередині шпинделя, а гайка з'єднана з пінолем, який відрізняється тим, що привод головного руху шпинделя розташований всередині пінолю з можливістю передачі крутного моменту за допомогою електромагнітного поля, електропривод подачі виконаний співвісно з гвинтовою передачею.2....
Шпиндельний вузол верстата
Номер патенту: 104512
Опубліковано: 10.02.2014
Автори: Гайдаєнко Юрій Васильович, Ковтун Андрій Сергійович, Кузнєцов Юрій Миколайович, Шинкаренко Василь Федорович, Олійник Катерина Олександрівна
МПК: B23Q 1/00, B23B 47/00, B23Q 5/00, B23B 19/00
Мітки: шпіндельний, вузол, верстата
Формула / Реферат:
Шпиндельний вузол верстата, що містить корпус, привод головного руху шпинделя, розташований всередині пінолю з можливістю безпосередньої передачі крутного моменту від статора електродвигуна обертального руху на ротор, що механічно зв'язаний зі шпинделем, та електропривод подачі, виконаний співвісно зі шпинделем, який відрізняється тим, що привод подачі виконано у вигляді циліндричного електродвигуна поступального руху, а шпиндель механічно і...
Шпиндельний вузол металорізального верстата
Номер патенту: 79058
Опубліковано: 10.04.2013
Автори: Пестунов Володимир Михайлович, Бабич Валентин Миколайович
МПК: F16B 9/00
Мітки: верстата, металорізального, шпіндельний, вузол
Формула / Реферат:
Шпиндельний вузол металорізального верстата, у шпинделі якого знаходиться піноль, з'єднана ходовим гвинтом зі штоком стабілізатора швидкості її поступального руху, виконаного у вигляді гідроциліндра, розташованого в центральному отворі шпинделя, який відрізняється тим, що ходовий гвинт оснащений гальмом і двома протилежними нарізками, з кожною з яких спряжена гайка, яка має муфту зчеплення, а порожнини гідроциліндра з'єднані каналами, в яких...
Шпиндельний вузол верстата
Номер патенту: 82880
Опубліковано: 27.08.2013
Автори: Шинкаренко Василь Федорович, Гайдаєнко Юрій Васильович, Ковтун Андрій Сергійович, Олійник Катерина Олександрівна, Кузнєцов Юрій Миколайович
МПК: B23B 47/00, B23B 19/00
Мітки: вузол, верстата, шпіндельний
Формула / Реферат:
Шпиндельний вузол верстата, що містить корпус, індикатор головного руху шпинделя, розташований всередині пінолі з можливістю безпосередньої передачі крутного моменту на ротор, що механічно зв'язаний зі шпинделем, та електропривод подачі, виконаний співвісно зі шпинделем, який відрізняється тим, що привод подачі виконано у вигляді циліндричного електродвигуна поступального руху, а шпиндель механічно і електромагнітно суміщує функцію ротора...
Шпиндельний вузол верстата
Номер патенту: 80481
Опубліковано: 27.05.2013
Автор: Кузнєцов Юрій Миколайович
МПК: B23B 19/00, B23B 17/00
Мітки: шпіндельний, вузол, верстата
Формула / Реферат:
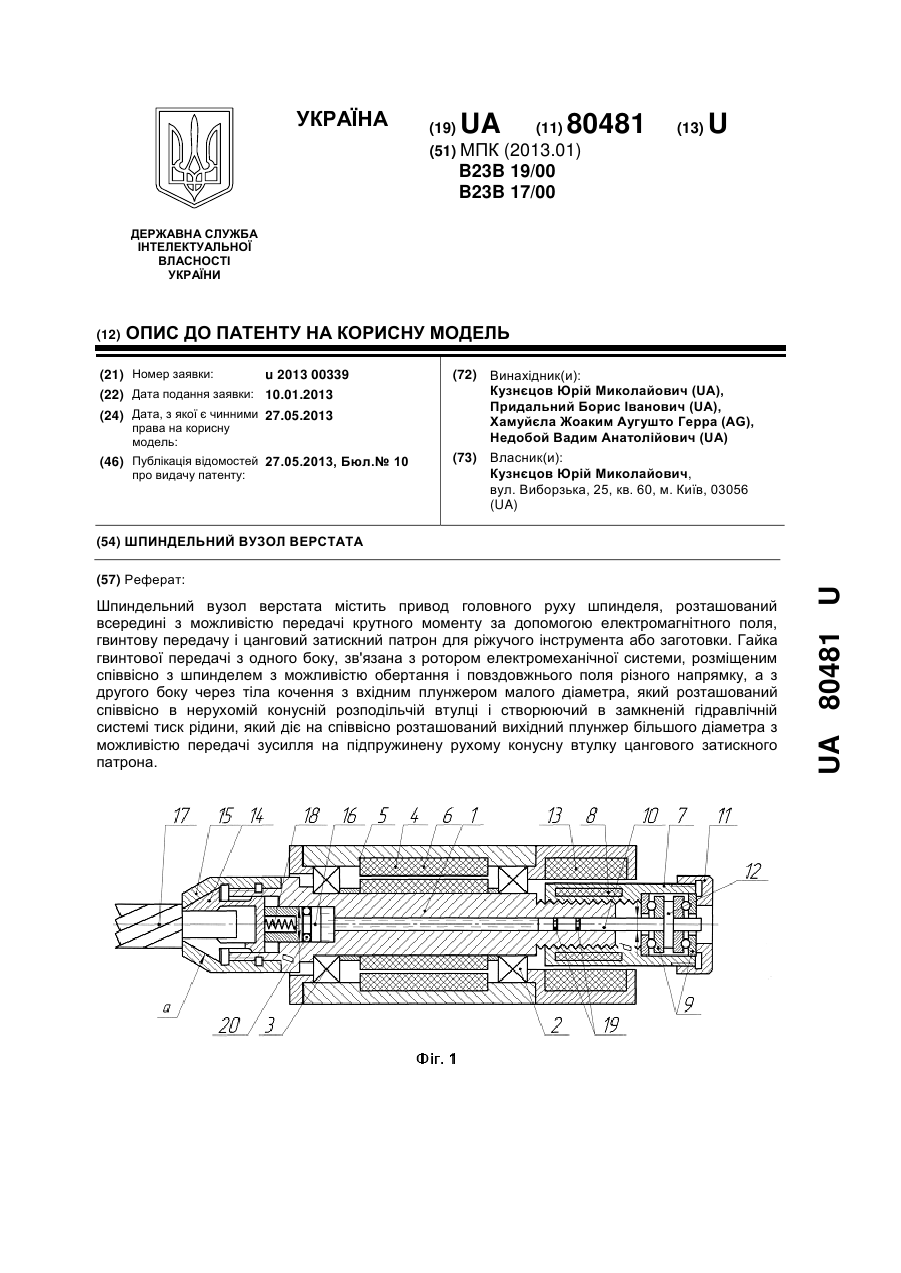
Шпиндельний вузол верстата, що містить привод головного руху шпинделя, розташований всередині з можливістю передачі крутного моменту за допомогою електромагнітного поля, гвинтову передачу і цанговий затискний патрон для ріжучого інструмента або заготовки, який відрізняється тим, що гайка гвинтової передачі з одного боку, зв'язана з ротором електромеханічної системи, розміщеним співвісно з шпинделем з можливістю обертання і повздовжнього поля...
Попередній патент: Залізнична цистерна
Наступний патент: Машинка закатна напівавтоматична для закупорювання скляної тари при домашній консервації
Випадковий патент: Спосіб зниження статистичного прогнозу результатів гри в рулетку