Спосіб надлишкових вимірювань віддалі до нерухомого об’єкта
Номер патенту: 96238
Опубліковано: 10.10.2011
Автори: Кондратов Владислав Тимофійович, Лимич Петро Омелянович


Формула / Реферат
Спосіб надлишкових вимірювань віддалі до нерухомого об'єкта, заснований на формуванні потоку інфрачервоного випромінювання заданої довжини хвилі і потужності, модуляції його опорним високочастотним сигналом заданої частоти і амплітуди, спрямовуванні модульованого потоку інфрачервоного випромінювання на досліджуваний об'єкт, що розташований на віддалі ![]() , прийомі відбитого від об'єкта потоку інфрачервоного випромінювання з високочастотною обвідною, що затримана у часі, перетворенні її у електричний сигнал, виділенні основної гармоніки, тобто сигналу частоти модуляції
, прийомі відбитого від об'єкта потоку інфрачервоного випромінювання з високочастотною обвідною, що затримана у часі, перетворенні її у електричний сигнал, виділенні основної гармоніки, тобто сигналу частоти модуляції ![]() , підсиленні його до рівня опорного високочастотного сигналу, визначенні та запам'ятовуванні числа повних періодів, що пройшли за час затримки потоку модульованого інфрачервоного випромінювання, вимірюванні та запам'ятовуванні часу затримки
, підсиленні його до рівня опорного високочастотного сигналу, визначенні та запам'ятовуванні числа повних періодів, що пройшли за час затримки потоку модульованого інфрачервоного випромінювання, вимірюванні та запам'ятовуванні часу затримки ![]() між опорним та затриманим високочастотними сигналами з наступним визначенням віддалі за рівнянням вимірювання, який відрізняється тим, що спочатку одним з відомих способів вимірюють тиск, температуру повітря та парціальний тиск водяних парів, визначають значення показника заломлення повітря за рівнянням вимірювання
між опорним та затриманим високочастотними сигналами з наступним визначенням віддалі за рівнянням вимірювання, який відрізняється тим, що спочатку одним з відомих способів вимірюють тиск, температуру повітря та парціальний тиск водяних парів, визначають значення показника заломлення повітря за рівнянням вимірювання
 ,
,
де: ![]() - тиск, gPa;
- тиск, gPa; ![]() ;
; ![]() - температура повітря, °С;
- температура повітря, °С; ![]() - парціальний тиск водяних парів, mmHg.;
- парціальний тиск водяних парів, mmHg.; ![]() - довжина хвилі;
- довжина хвилі; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ; коефіцієнти
; коефіцієнти ![]() отримані експериментально, причому
отримані експериментально, причому ![]() , при цьому після спрямування модульованого потоку інфрачервоного випромінювання на об'єкт з невідомою віддаллю
, при цьому після спрямування модульованого потоку інфрачервоного випромінювання на об'єкт з невідомою віддаллю ![]() , визначення основного та додаткового часів затримки
, визначення основного та додаткового часів затримки ![]() та
та ![]() , де
, де ![]() - число повних періодів
- число повних періодів ![]() , протягом часу проходження модульованого потоку інфрачервоного випромінювання до і від об'єкта дослідження та їх запам'ятовування визначають і запам'ятовують повне значення часу затримки
, протягом часу проходження модульованого потоку інфрачервоного випромінювання до і від об'єкта дослідження та їх запам'ятовування визначають і запам'ятовують повне значення часу затримки ![]() , де
, де ![]() - похибка визначення часу затримки, за яким визначають і запам'ятовують приблизне значення віддалі
- похибка визначення часу затримки, за яким визначають і запам'ятовують приблизне значення віддалі
![]() ,
,
де ![]() - швидкість світла,
- швидкість світла, ![]() - коефіцієнт заломлення повітря вздовж шляху проходження інфрачервоного випромінювання,
- коефіцієнт заломлення повітря вздовж шляху проходження інфрачервоного випромінювання,
перераховують отримане значення віддалі ![]() у значення нормованої віддалі
у значення нормованої віддалі ![]() за умовою, що нормоване значення останньої є найменшим і найближчим до значення визначеної віддалі
за умовою, що нормоване значення останньої є найменшим і найближчим до значення визначеної віддалі ![]() , тобто
, тобто ![]() , де
, де ![]() - встановлене значення дискретності чи нормований приріст віддалі, що відповідає часу затримки
- встановлене значення дискретності чи нормований приріст віддалі, що відповідає часу затримки ![]() з урахуванням впливу тиску, температури повітря та парціального тиску водяних парів (або
з урахуванням впливу тиску, температури повітря та парціального тиску водяних парів (або ![]() ) на стан шляху розповсюдження потоку інфрачервоного випромінювання, після чого обчислюють та запам'ятовують час затримки
) на стан шляху розповсюдження потоку інфрачервоного випромінювання, після чого обчислюють та запам'ятовують час затримки ![]() , що відповідає умовній нормованій за значенням віддалі
, що відповідає умовній нормованій за значенням віддалі ![]() , затримують опорний високочастотний сигнал модуляції на час
, затримують опорний високочастотний сигнал модуляції на час ![]() шляхом введення в нього додаткового фазового зсуву
шляхом введення в нього додаткового фазового зсуву ![]() , модулюють ним потік інфрачервоного випромінювання, спрямовують модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на
, модулюють ним потік інфрачервоного випромінювання, спрямовують модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на ![]() , на досліджуваний об'єкт з невідомою віддаллю
, на досліджуваний об'єкт з невідомою віддаллю ![]() , виділяють обвідну прийнятого модульованого потоку інфрачервоного випромінювання, визначають і запам'ятовують основний та додатковий часи затримки
, виділяють обвідну прийнятого модульованого потоку інфрачервоного випромінювання, визначають і запам'ятовують основний та додатковий часи затримки ![]() та
та ![]() , де
, де ![]() - число повних періодів
- число повних періодів ![]() між опорним та затриманим у часі сигналами, визначають і запам'ятовують повний час затримки
між опорним та затриманим у часі сигналами, визначають і запам'ятовують повний час затримки ![]() між опорним та затриманим сигналами, направляють модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на
між опорним та затриманим сигналами, направляють модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на ![]() , на об'єкт з нульовою віддаллю, визначають і запам'ятовують час затримки
, на об'єкт з нульовою віддаллю, визначають і запам'ятовують час затримки ![]() між опорним та затриманим у часі сигналами, після цього визначають і запам'ятовують повний час затримки
між опорним та затриманим у часі сигналами, після цього визначають і запам'ятовують повний час затримки ![]() , що відповідає реальній віддалі
, що відповідає реальній віддалі ![]() , а про дійсне значення віддалі
, а про дійсне значення віддалі ![]() до досліджуваного об'єкта судять за рівнянням надлишкових вимірювань
до досліджуваного об'єкта судять за рівнянням надлишкових вимірювань
![]() .
.
Текст
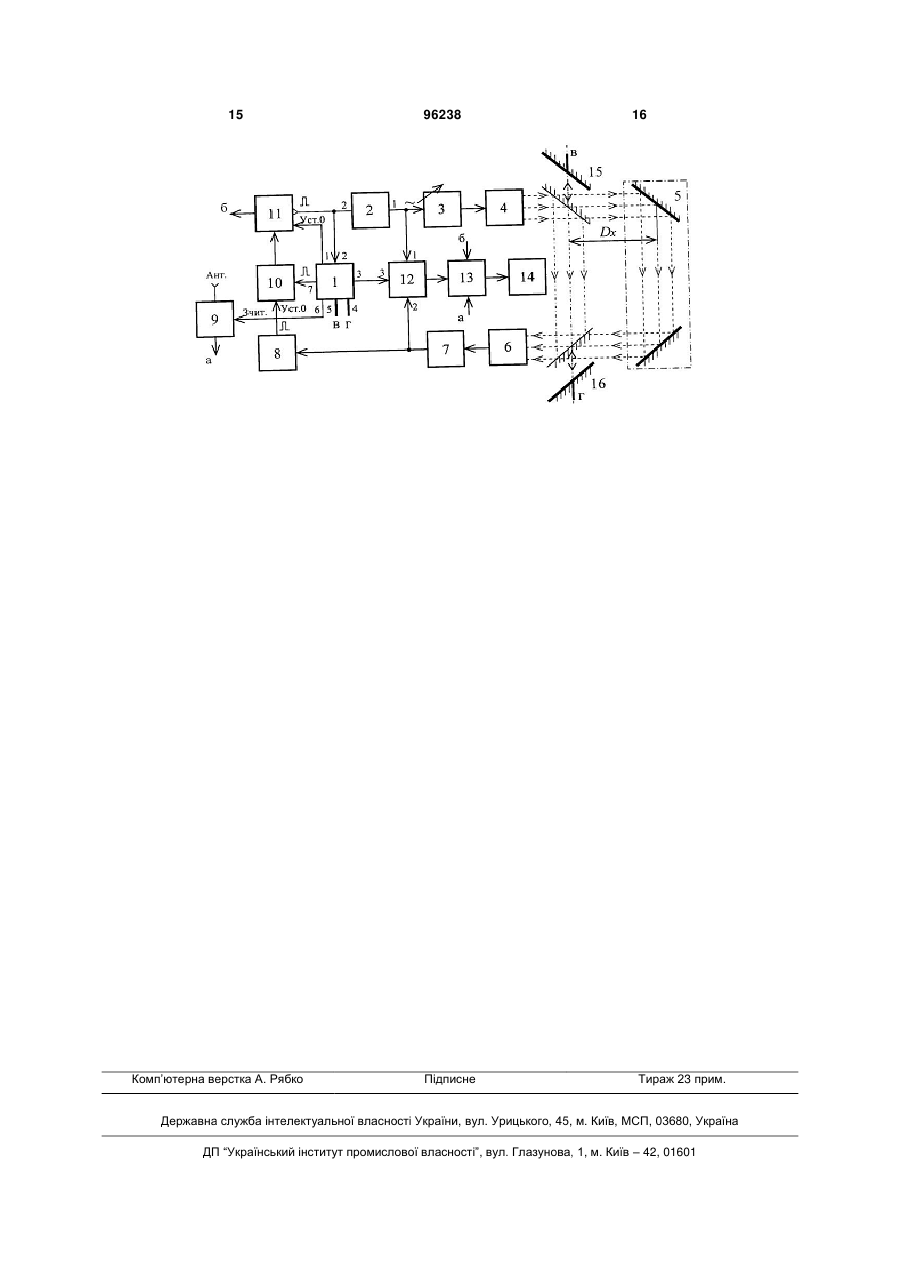
Спосіб надлишкових вимірювань віддалі до нерухомого об'єкта, заснований на формуванні потоку інфрачервоного випромінювання заданої довжини хвилі і потужності, модуляції його опорним високочастотним сигналом заданої частоти і амплітуди, спрямовуванні модульованого потоку інфрачервоного випромінювання на досліджуваний об'єкт, що розташований на віддалі D x , прийомі відбитого від об'єкта потоку інфрачервоного випромінювання з високочастотною обвідною, що затримана у часі, перетворенні її у електричний сигнал, виділенні основної гармоніки, тобто сигналу частоти модуляції f0 , підсиленні його до рівня опорного високочастотного сигналу, визначенні та запам'ятовуванні числа повних періодів, що пройшли за час затримки потоку модульованого інфрачервоного випромінювання, вимірюванні та запам'ятовуванні часу затримки t x між опорним та затриманим високочастотними сигналами з наступним визначенням віддалі за рівнянням вимірювання, який відрізняється тим, що спочатку одним з відомих способів вимірюють тиск, температуру повітря та парціальний тиск водяних парів, визначають значення показника заломлення повітря за рівнянням вимірювання 3 96238 4 D0 n2T0 tD0 t02 tD0 , що відповіc/~ n дає умовній нормованій за значенням віддалі D0 , затримки t x2 n3 T0 n 2 T0 t x2 t 03 t 02 t x 2 t 01 t x1 t 0 t 02 t D0 t x1 t D0 затримують опорний високочастотний сигнал модуляції на час tD 0 шляхом введення в нього до між опорним та затриманим сигналами, направляють модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на tD 0 , на об'єкт з нульовою віддаллю, визначають і t D0 даткового фазового зсуву D0 k tD0 / T0 k tD0 f0 , модулюють ним потік інфрачервоного випромінювання, спрямовують модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на tD 0 , на досліджуваний об'єкт з невідомою віддаллю D x , виділяють обвідну прийнятого модульованого потоку інфрачервоного випромінювання, визначають і запам'ятовують основний та додатковий часи затримки та t03 n3T0 t01 tx2 t x1 tD0 t0 , де n 3 - число повних пері запам'ятовують час затримки tx3 tD0 t0 між опорним та затриманим у часі сигналами, після цього визначають і запам'ятовують повний час затримки t x3 n2T0 tx3 t02 tD0 t0 , що відповідає реальній віддалі D0 , а про дійсне значення віддалі D x до досліджуваного об'єкта судять за рівнянням надлишкових вимірювань t t x3 D x D0 x 2 . t x 2 t x1 одів T0 між опорним та затриманим у часі сигналами, визначають і запам'ятовують повний час Винахід належить до галузі вимірювальної техніки, зокрема до способів вимірювання великих та середніх віддалей та може бути використаний при створенні далекомірів для військово-промислового комплексу, геодезії, навігації, будівництва тощо. Відомий спосіб надлишкових вимірювань віддалі до нерухомого об'єкта (Большаков В.Д. и др. Радиогеодезические и электроннооптические измерения. М., Недра, 1985. - с. 156-158). який заснований на створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні фазового зсуву електричного сигналу і визначенні віддалі за рівнянням вимірювань c Dx , (1) 4 F nГ n де c - швидкість розповсюдження світла у вакуумі; F - різниця частот двох оптичних випромінювань; nГ - середнє інтегральне значення групового показника переломлення повітря; вимірюваний фазовий зсув. З відомого співвідношення видно, що вимірювану віддаль одержують у частках довжини хвилі сумарної інтерференційної картини, яка створюється при суперпозиції оптичних когерентних коливань, що одночасно випромінюються на двох близьких частотах. Нестабільність різницевої частоти F і непостійність групового показника переломлення повітря nГ впливають на результат вимірювання. На близьких частотах двох оптичних випромінювань найменші зміни в частоті оптичних коливань викликають великі зміни їх різницевої частоти. Фазові зсуви при фотоелектричному перетворенні і виді ленні електричного сигналу різницевої частоти сумірні з корисним фазовим зсувом , тому що максимальний фазовий зсув не перевищує 2 за сигналом різницевої частоти. Тому сумарна похибка вимірювання віддалі виходить значною. Відомий спосіб надлишкових вимірювань віддалі до нерухомого об'єкта (див. деклараційний патент на винахід №21472 кл. G01C 3/00 (Україна) публ. 30.04.1998 p. Головко Д.Б., Скрипник Ю.О. Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення), який заснований на тому, що як зондуючий промінь використовують модульоване гармонічним коливанням лазерне випромінювання, яке направлене на контрольований предмет, а час подвійного проходження цим променем вимірюваної віддалі визначають за фазовим зсувом обвідної модуляції цього променя відносно модулюючого сигналу. За цим способом вимірювану віддаль визначають в частках довжини хвилі обвідної модуляції зондуючого променя. У відомому способі неминуча неоднорідність фази модуляції за перерізом зондуючого променя, реальні відхилення закону модуляції лазерного променя від гармонічного, а також фазові набіги, що виникають в процесах модуляції і демодуляції, не дозволяють одержати високу точність вимірювання. Найбільш близьким до запропонованого є спосіб надлишкових вимірювань віддалі до нерухомого об’єкта (див., наприклад, Патент України №90951 С2, МПК G01S 13/00, G01С 3/00. Кондратов В.Т., Лиміч П.О. Спосіб надлишкових вимірювань віддалі до нерухомого об'єкта), заснований на формуванні потоку інфрачервоного випромінювання заданої довжини хвилі і потужності, модуляції його опорним високочастотним сигналом заданої частоти і амплітуди, спрямовуванні модульованого потоку інфрачервоного випромі 5 нювання на досліджуваний об'єкт, що розташований на невідомій віддалі D x , прийомі відбитого від об’єкта інфрачервоного випромінювання з обвідною, що зсунута по фазі (затримана у часі), перетворенні обвідної прийнятого модульованого потоку інфрачервоного випромінювання у електричний сигнал, виділенні основної гармоніки високочастотного сигналу частоти модуляції, підсиленні його до рівня опорного високочастотного сигналу, підраховуванні та запам'ятовуванні числа повних фаз (періодів), що пройшли від моменту часу випромінювання до моменту часу прийому потоку інфрачервоного випромінювання, тобто за час затримки потоку інфрачервоного випромінювання, вимірюванні та запам'ятовуванні фазового зсуву x між опорним та зсунутим по фазі високочастотними сигналами частоти модуляції з наступним визначенням віддалі за рівнянням вимірювання. Недоліком даного методу є необхідність використання під час кожного вимірювання реального об’єкта з відомою віддаллю D0 до нього. При цьому точність результату вимірювання даним методом залежить від точності визначення віддалі D0 . Поставлена технічна задача в створенні такого способу надлишкових вимірювань віддалі до нерухомого об’єкта, який би забезпечував виключення адитивної і мультиплікативної складових систематичної похибок, виключення впливу фазового набігу сигналів в електричному та оптичному каналах, а також виключення впливу швидкості розповсюдження потоку інфрачервоного випромінювання в навколишньому середовищі на результат вимірювання. Поставлена технічна задача вирішується тим, що спосіб надлишкових вимірювань віддалі до нерухомого об’єкта, заснований на формуванні потоку інфрачервоного випромінювання заданої довжини хвилі і потужності, модуляції його опорним високочастотним сигналом заданої частоти і амплітуди, спрямовуванні модульованого потоку інфрачервоного випромінювання на досліджуваний об'єкт, що розташований на віддалі D x , прийомі відбитого від об'єкта потоку інфрачервоного випромінювання з високочастотною обвідною, що затримана у часі, перетворенні її у електричний сигнал, виділенні основної гармоніки, тобто сигналу частоти модуляції f0 , підсиленні його до рівня опорного високочастотного сигналу, визначенні та запам'ятовуванні числа повних періодів, що пройшло за час затримки потоку модульованого інфрачервоного випромінювання, вимірюванні та запам'ятовуванні часу затримки t x між опорним та затриманим високочастотними сигналами з наступним визначенням віддалі за рівнянням вимірювання. Від відомих він відрізняється тим, що спочатку одним з відомих способів вимірюють тиск, температуру повітря та парціальний тиск водяних парів, визначають значення показника заломлення повітря за рівнянням вимірювання 96238 6 ~ n k B k k C b k1 A 32 2 4 3 p p0 t t p e a 2 ~0 , n t 0 t t 0 t , де p - тиск, gPa; β t t 1049 0,0157t 106 ; t температура повітря, °С; e - парціальний тиск водяних парів, mmHg.; 635m - довжина хвилі; k 2 ; k 3 ; p0 1 ; t 0 1 ; ~0 1 ; коефіn 2 3 цієнти A,B, C, , a, b, k1 отримані експериментально, причому A 2876,041 10 7 ; B 16,288 10 7 ; C 0,136 10 7 ; 0,00366; a 6,24 10 8 ; b 0,068 10 8 ; k 1 0,001387188, після спрямування модульованого потоку інфрачервоного випромінювання на об'єкт з невідомою віддаллю D x , визначення основного та додаткового часів затримки t01 n1T0 та tx1 , де число n1 повних періодів T0 , протягом часу проходження модульованого потоку інфрачервоного випромінювання до і від об’єкта дослідження та їх запам'ятовування визначають і запам'ятовують повне значення часу затримки t x1 n1T0 tx1 t01 t x1 t0 , де t0 - похибка визначення часу затримки, за яким визначають і запам'ятовують приблизне значення віддалі Dx D x D x t 01 t x1 c / ~ t 0 c / ~ n n T0 f0 T0 f0 t x1 c / ~ n t x1c / ~ , n T0 f0 де c - швидкість світла, ~ - коефіцієнт залоn млення повітря вздовж шляху проходження інфрачервоного випромінювання, при цьому перераховують отримане значення віддалі Dx у значення нормованої віддалі D0 за умови, що нормоване значення останньої є найменше і найближче до значення визначеної віддалі тобто Dx , D0 D0extDx /D0 , де D0 - встановлене значення дискретності чи нормований приріст віддалі, що відповідає часу затримки 0,01 0,25T0 з урахуванням впливу тиску, температури повітря та парціального тиску водяних парів (або ~ ) на стан шляху розповсюдження поn току інфрачервоного випромінювання, обчислюють та запам'ятовують час затримки D0 t D0 n2T0 tD0 t02 tD0 , що відповіc/~ n дає умовній нормованій за значенням віддалі D0 , затримують опорний високочастотний сигнал модуляції на час tD 0 шляхом введення в нього додаткового фазового зсуву D0 k tD0 / T0 k tD0 f0 , модулюють ним потік інфрачервоного випромінювання, спрямовують модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на tD 0 , на 7 досліджуваний об'єкт з невідомою віддаллю D x , виділяють обвідну прийнятого модульованого потоку інфрачервоного випромінювання, визначають і запам'ятовують основний та додатковий часи затримки та t03 n3T0 t01 tx2 t x1 tD0 t0 , де n 3 - число повних періодів T0 між опорним та затриманим у часі сигналами, визначають і запам'ятовують повний час затримки t x2 n3 T0 n 2 T0 t x2 t 03 t 02 t x2 t 01 t x1 t 0 t 02 t D0 t x1 t D0 між опорним та затриманим сигналами, спрямовують модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на tD 0 , на об'єкт з нульовою віддаллю, визначають і запам'ятовують час затримки tx3 tD0 t0 між опорним та затриманим у часі сигналами, після цього визначають і запам'ятовують повний час затримки t x3 n2T0 tx3 t02 tD0 t0 , що відповідає реальній дальності D0 , а про дійсне значення віддалі D x до досліджуваного об'єкта судять за рівнянням надлишкових вимірювань t t x3 D x D0 x 2 . t x 2 t x1 На рисунку представлена схема пристрою, який реалізує запропонований спосіб надлишкових вимірювань віддалі до нерухомого об’єкта, де 1 телеметричний пристрій для визначення показника заломлення повітря; 2 - високочастотний генератор електричних коливань; 3 - градуйований фазообертач; 4 - генератор оптичного випромінювання з внутрішнім модулятором; 5 - об'єкт дослідження; 6 - фотоприймач; 7 - вибірковий підсилювач; 8 - формувач імпульсів; 9 - синхронізований блок керування; 10 - тригер; 11 - лічильник імпульсів; 12 - вимірювач інтервалів часу; 13 - блок обчислювання; 14 - цифровий відліковий пристрій; 15 та 16 - перше та друге відбивні дзеркала. В основу способу надлишкових вимірювань віддалі до нерухомого об’єкта покладено метод надлишкових вимірювань, оснований як на вимірюванні невідомої за значенням віддалі, так і додаткових віддалей, що відрізняються від невідомої за значенням. Суть методу полягає у наступному. Відомо, що в існуючих методах вимірювання віддаль визначається згідно з рівнянням вимірювання c D x t x ~ , (1), n де t x - час затримки між опорним (модулюючим) і зсуненим у часі (відбитим і демодульованим) сигналами; c - швидкість розповсюдження потоку інфрачервоного випромінювання в навколишньому середовищі, ~ - коефіцієнт заломлення n повітря вздовж шляху проходження інфрачервоного випромінювання. Запропонований спосіб надлишкових вимірювань віддалі до нерухомого об’єкта заснований на 96238 8 формуванні потоку Ф х інфрачервоного випромінювання заданої довжини хвилі 0 і потужності, модуляції його опорним високочастотним сигналом заданої частоти і амплітуди u1t Um0 sin 0 t t0 , (2) де t0 - початковий часовий зсув; 0 2f0 кутова частота модуляції; Um0 - амплітуда опорного електричного сигналу; t - поточний час. Модульований потік оптичного інфрачервоного випромінювання Ф х направляють на досліджуваний об'єкт, що розташований на невідомій віддалі D x . Приймають відбитий від об’єкта ослаблений за потужністю потік інфрачервоного випромінювання Фх з обвідною, що затримана в часі на t x . Обвідну прийнятого модульованого потоку інфрачервоного випромінювання перетворюють (демодулюють) у електричний сигнал u2 t Um1 sin 0 t t0 t x t0 , (3) де Um1 - амплітуда прийнятого сигналу; t x час затримки між опорним та прийнятим високочастотними сигналами частоти модуляції; t0 - час затримки сигналу в електричному та оптичному каналах зв'язку. Виділяють основну гармоніку високочастотного сигналу частоти модуляції, яку підсилюють до рівня опорного сигналу. Після цього підраховують та запам'ятовують число повних періодів t nT0 , що пройшли від моменту часу випромінювання до моменту часу прийому потоку інфрачервоного випромінювання, тобто за час затримки потоку інфрачервоного випромінювання. Далі вимірюють значення часу затримки t x між опорним та прийнятим високочастотними сигналами частоти модуляції. Отримане значення t x nT0 t x t0 , (4) запам'ятовують. Після визначення числового значення часу затримки t x , у відомих способах дійсне значення віддалі визначають за відомим рівнянням числових значень (1). Запропонований спосіб надлишкових вимірювань віддалі до нерухомого об’єкта від відомих відрізняється тим, що спочатку одним з відомих способів вимірюють тиск, температуру повітря та парціальний тиск водяних парів. За рівнянням Баррела і Сірса, рекомендованого XII Генеральною Асамблеєю Міжнародного геодезичного та геофізичного союзу при віддалемірних вимірюваннях, обчислюють значення показника заломлення повітря: ~ n k B k k C b k1 A 32 2 4 3 p p0 t t p e a 2 ~ 0 n0 , t 0 t t t (5) де p - тиск, gPa; β; t - температура повітря, °С; e - парціальний тиск водяних парів, mmHg.; 635m - довжина хвилі; k 2 2 ; k 3 3 ; p0 1 ; t 0 1 ; ~0 1 ; коефіцієнти A,B, C, , a, b,k1 отриn 9 мані 96238 експериментально, причому A 2876,041 10 7 ; B 16,288 10 7 ; C 0,136 10 7 ; 0,00366; a 6,24 10 8 ; b 0,068 10 8 ; k 1 0,001387188 . На основі (5) обчислюють значення швидкості розповсюдження електромагнітних коливань в атмосфері з урахуванням стану атмосфери згідно з рівнянням величин c c ~ , (6), n де c - значення швидкості розповсюдження електромагнітних коливань в атмосфері з урахуванням стану атмосфери. Потім модульований потік інфрачервоного випромінювання направляють на об'єкт з невідомою віддаллю D x . Підраховують та запам'ятовують число повних періодів t01 n1T0 за час затримки потоку інфрачервоного випромінювання. Вимірюють час затримки tx1 між опорним (2) та прийнятим високочастотним сигналом частоти модуляції u3 t Um1 sin 0 t t0 t x1 t0 , (7) де t x1 - час затримки між опорним та відбитим високочастотними сигналами частоти модуляції, що несе інформацію про віддаль D x . Запам'ятовують отримане повне значення часу затримки t x1 n1T0 tx1 t01 t x1 t0 , (8) де n1 - число повних фаз за час затримки потоку інфрачервоного випромінювання. Потім, згідно з запропонованим способом, обчислюють значення віддалі Dx за рівнянням числових значень: t01 t x1 c / ~ n T0 f0 t c / ~ t x1 c / ~ n n 0 t x1c / ~, n T0 f0 T0 f0 Dx Dx Dx (9) де c 2.99792458 108 m/s - швидкість розповсюдження електромагнітних коливань в атмосфері. За отриманим значенням віддалі Dx розраховують нормоване значення умовної віддалі D0 . Це здійснюється з урахуванням умови, що нормоване значення віддалі D0 є найменше найближче зна чення до визначеного значення Dx віддалі досліджуваної D x , тобто D0 D0extDx /D0 , де D0 - встановлене значення дискретності чи нормований приріст віддалі, що відповідає часу затримки 0,01 0,25T0 , з урахуванням впливу тиску, температури повітря та парціального тиску водяних парів (або ~ ) на стан шляху розповсюn дження оптичного інфрачервоного випромінювання. Визначають час затримки, що відповідає віддалі D0 , за рівнянням вимірювань 10 t D0 D0 n2T0 tD0 t02 tD0 , c/~ n (10), де t D0 - значення часу затримки, що відповідає віддалі D0 . Після цього затримують високочастотний сигнал модуляції на час tD 0 шляхом введення додаткового фазового зсуву D0 k фtD0 / T0 k фtD0 f0 , (11) де kф 2 , D0 - значення фазового зсуву, що відповідає нормованій за значенням умовній віддаліD0 . Модулюють потік інфрачервоного випромінювання сигналом з фазовим зсувом D0 . Направляють модульований потік інфрачервоного випромінювання на об'єкт з невідомою віддаллю D x . Виділяють обвідну прийнятого модульованого потоку інфрачервоного випромінювання. Визначають і запам'ятовують основний та додатковий часи затримки між опорним та затриманим у часі сигналами, тобто та t03 n3T0 t01 tx2 t x1 tD0 t0 , де n 3 - число повних періодів T0 , за час проходження модульованого потоку інфрачервоного випромінювання до і від об’єкта дослідження. Причому час затримки tx 2 визначають між опорним (2) та прийнятим високочастотним сигналом частоти модуляції u4 t Um2 sin 0 t t0 t x1 tD0 t0 . (12) Визначають та запам'ятовують повний час затримки між опорним та затриманим сигналами, тобто t x2 n3 T0 n 2 T0 t x2 (13) t 01 t x1 t 0 t 02 t D0 t x1 t D0 , де n 3 - число повних фаз за час затримки потоку інфрачервоного випромінювання, що дорівнює сумі значень повних періодів та часу затримки. Модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі на tD 0 , направляють на об'єкт з нульовою віддаллю D00 D00 0 . Вимірюють і запам'ятовують час за тримки tx3 tD0 t0 між опорним (2) та затриманим у часі високочастотним сигналом частоти модуляції u5 t Um2 sin 0 t t0 tD0 t0 . (14) Визначають та запам'ятовують числове значення повних періодів та часу затримки, тобто повний час затримки, що відповідає віддалі D0 , згідно з рівнянням вимірювань t x3 n2T0 tx3 t02 tD0 t0 , (15) Про дійсне значення віддалі D x до досліджуваного об’єкта судять за рівнянням числових значень: 11 D x D0 t x 2 t x3 , t x 2 t x1 96238 (16) де t x1, t x2, t x3 - результати проміжних вимірювань та розрахунків; D0 - нормоване значення віддалі. Як видно з рівняння вимірювання (16), запропонований спосіб за рахунок операції віднімання забезпечує виключення адитивної складової і за рахунок операції ділення - мультиплікативної складової систематичної похибки, що вносяться функціональними блоками, наприклад, оптикоелектронного каналу з фотоприймачем і т.ін. За рахунок обчислення коефіцієнта заломлення повітря вздовж шляху проходження інфрачервоного випромінювання із результату вимірювань виключається похибка від зміни швидкості світла в залежності від стану атмосфери. Опишемо суть запропонованого способу на прикладі роботи пристрою, структурна схема якого показана на рисунку. Його робота складається з трьох тактів вимірювання і одного такту обчислення дійсного значення віддалі до досліджуваного об’єкта. Після включення пристрою вихідні сигнали блока керування 1 надходять на функціональні блоки 10, 11 і 12 і встановлюють його в початковий стан. По команді з блока керування 1 перше та друге дзеркала 15 і 16 встановлюються у положення, показане на рисунку шляхом дії сигналів з виходів «4» і «5» блока керування 1. Сигналом з виходу «3» блока керування 1 вимірювач інтервалів часу 12 встановлюється в стан готовності до вимірювань. Через антену телеметричного пристрою 9 з супутника зв'язку надходять дані щодо тиску, температури повітря та парціального тиску водяних парів. За допомогою телеметричного пристрою 9 визначається значення показника заломлення повітря за рівнянням вимірювання (5). При подачі сигналу з виходу «6» блока керування 1 на керуючий вхід «зчитування» телеметричного пристрою 9 (див. рисунок), здійснюється передача значення показника заломлення повітря на вхідний регістр блока обчислювання 13 (див. на рисунку вхід «а»). За допомогою цифрового відлікового пристрою 14 можна побачити обчислене значення показника заломлення. В блоці обчислювання 13 за рівнянням числових значень (6) обчислюють значення швидкості розповсюдження електромагнітних коливань в атмосфері c з урахуванням її стану. За допомогою генератора 2 формується опорний сигнал заданої частоти та амплітуди на виході «1», а на виході «2» - імпульсний сигнал тієї ж частоти. Сигнал з виходу «1» генератора 2 надходить на перший вхід вимірювача 12 інтервалів часу. Одночасно він проходить через градуйований фазообертач 3 і надходить на вхід керування генератора 4 оптичного інфрачервоного випромінювання. На виході генератора 4 оптичного інфрачервоного випромінювання формується модульований сигналом (2) потік інфрачервоного випромінювання заданої довжини хвилі і потужності. 12 У першому такті модульований потік інфрачервоного випромінювання подається на досліджуваний об'єкт 5 з невідомою віддаллю. Одночасно з електричного виходу 1 високочастотного генератора 2 модулюючий сигнал (2) надходить на перший вхід «1» вимірювача 12 інтервалів часу. З імпульсного виходу 2 високочастотного генератора 2 імпульсний сигнал з частотою прямування імпульсів рівною f0 подається на вхід лічильника імпульсів 11. На керуючий вхід «лічба» лічильника імпульсів 11 подається дозволяючий сигнал з прямого виходу тригера 10. Слід зазначити, що обнулення лічильника 11 здійснюється сигналом з виходу «1» блока керування 1. Обнулення тригера 10 здійснюється сигналом з виходу «7» блока керування 1. Відбитий від об’єкта 5 модульований потік інфрачервоного випромінювання з обвідною, що затримана у часі, приймається за допомогою фотоприймача 6 і перетворюється у електричний сигнал (7). Останній за допомогою вибіркового підсилювача 7 підсилюється до необхідного рівня. З виходу підсилювача 7 електричний сигнал (7) подається на другий вхід вимірювача інтервалів часу 12 (див. вхід «2» блока 12 на рисунку) та на вхід формувача імпульсів 8. З виходу формувача імпульсів 8 імпульс подається на вхід установки нуля тригера 10. Сигнал логічного нуля з виходу тригера 10 надходить на вхід лічильника імпульсів 11. Після цього останній припиняє рахувати імпульси. Код числа повних періодів n1 , що отриманий за час затримки потоку інфрачервоного випромінювання, з виходу лічильника імпульсів 11 надходить у регістр числа блока обчислювання 13 (див. вхід б). За допомогою вимірювача інтервалів часу 12 визначається додатковий час затримки tx1 між опорним (2) та зсунутим по фазі (7) високочастотними сигналами частоти модуляції. Отримане значення часу затримки t x1 (8) з виходу вимірювача інтервалів часу 12 подається у вигляді цифрового коду на регістр пам'яті блока обчислювання 13. У другому такті вимірювань з урахуванням часу затримки t x1 обчислюється значення віддалі Dx за рівнянням числових значень (9). За отриманим значенням віддалі Dx розраховують нормоване значення «віртуальної» віддалі ванням умови, що нормоване найменше найближче значення до значення «віртуальної» віддалі D0 D0extDx /D0 , D0 з урахузначення є визначеного Dx , тобто де D0 - встановлене значення дискретності чи нормований приріст віддалі, що відповідає часу затримки 0,01 0,25T0 . За рівнянням вимірювань (10) у блоці 13 обчислюється значення часу затримки t D0 , що відповідає нормованій за значенням віртуальній віддалі D0 . За рівнянням вимірювань (11) 13 обчислюється відповідне значення фазового зсуву D0 . Для імітації реальної відділі D0 здійснюється зсув по фазі на D0 високочастотного сигналу модуляції за допомогою градуйованого фазообертача 3. Тобто, за допомогою фазообертача 3 збільшують значення початкового фазового зсуву опорного сигналу (2) на значення D0 . Направляють потік інфрачервоного випромінювання на об'єкт з невідомою віддаллю 5. Одночасно з високочастотного генератора 2 електричні коливання (2) подаються на перший вхід «1» вимірювача інтервалів часу 12, а з імпульсного виходу «2» цього генератора імпульсний сигнал з частотою слідування f0 подають на вхід лічильника імпульсів 11. На керуючий вхід «лічба» лічильника імпульсів 11 подається дозволяючий сигнал з прямого виходу тригера 10. Відбитий від об’єкта 5 потік інфрачервоного випромінювання з обвідною, що затримана в часі, приймається за допомогою фотоприймача 6. Модульований потік інфрачервоного випромінювання перетворюється у електричний сигнал (12). З виходу фотоприймача 6 електричний сигнал (12) підсилюється у вибірковому підсилювачі 7 і подається на другий вхід «2» вимірювача інтервалів часу 12. Одночасно цей сигнал надходить на формувач імпульсів 8. Сформовані імпульси з виходу формувача 8 подаються на вхід установки нуля тригера 10 (див. вхід «Уст. 0»). Сигнал логічного нуля з виходу тригера 10 надходить на вхід лічильника імпульсів 11. Після цього останній припиняє рахувати імпульси. Код числа повних періодів n 3 , сформований лічильником імпульсів 11 за час затримки потоку інфрачервоного випромінювання, надходить на регістр блока обчислювання 13, де запам'ятовується. За допомогою вимірювача 12 інтервалів часу вимірюється додатковий час затримки між опорним (2) та зсунутим по фазі (12) високочастотними сигналами частоти модуляції. Отримане значення часу затримки t x2 (13), що відповідає сумарній віддалі Dx D0 , з виходу вимірювача 12 інтервалів часу у вигляді коду числа подається на регістр блока обчислювання 13 і запам'ятовується. У наступному третьому такті, по команді з блока керування 1 (виходи «в» і «г» блока 1), перше та друге дзеркала 15 і 16 встановлюються у положення, протилежне показаному на рисунку (див. на 96238 14 рисунку зображення дзеркал тонкими лініями). Цим самим формується віддаль нульового значення 00 0 . D Направляють потік інфрачервоного випромінювання на об'єкт з нульовою віддаллю. Одночасно з високочастотного генератора 2 електричних коливань сигнал (2) подається на перший вхід «1» вимірювача інтервалів часу 12. За допомогою фотоприймача 6 приймається відбитий від зазначеного об’єкта потік інфрачервоного випромінювання з обвідною, що затримана в часі. Модульований потік інфрачервоного випромінювання перетворюється у електричний сигнал (14) і підсилюється. З виходу вибіркового підсилювача 7 електричний сигнал надходить на другий вхід вимірювача інтервалів часу 12. За допомогою вимірювача інтервалів часу 12 визначають час затримки між опорним (2) та зсунутим по фазі (14) високочастотними сигналами частоти модуляції. Отримане значення часту затримки t x3 (15), що відповідає реальній відділі D0 , з виходу вимірювача інтервалів часу 12 у вигляді коду числа надходить на регістр блока обчислювання 13, де й запам'ятовується. Отримані значення часу затримки та нормованої за значенням віддалі обчислюються згідно з рівнянням надлишкових вимірювань (16). В результаті отримують дійсне значення віддалі D x до досліджуваного об’єкта, яке висвітлюється за допомогою цифрового відлікового пристрою 14. Таким чином запропонований спосіб надлишкових вимірювань віддалі до нерухомого об’єкта забезпечує виключення адитивної і мультиплікативної складових систематичної похибок, виключення впливу фазового набігу сигналів в електричному та оптичному каналах, а також виключення впливу швидкості розповсюдження потоку інфрачервоного випромінювання в навколишньому середовищі на результат вимірювання. Технічна реалізація запропонованого способу не викликає ніяких труднощів і може бути здійснена на сучасній мікроелектронній базі. Таким чином, запропонований спосіб надлишкових вимірювань віддалі до нерухомого об’єкта забезпечує вирішення зазначеної технічної задачі. 15 Комп’ютерна верстка А. Рябко 96238 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of excess measurements of distance to a fixed object
Автори англійськоюKondratov Vladyslav Tymofiiovych, Lymych Petro Omelianovych
Назва патенту російськоюСпособ избыточных измерений расстояния до неподвижного объекта
Автори російськоюКондратов Владислав Тимофеевич, Лимич Петр Емельянович
МПК / Мітки
МПК: G01S 17/00, G01C 3/00
Мітки: віддалі, вимірювань, нерухомого, надлишкових, об'єкта, спосіб
Код посилання
<a href="https://ua.patents.su/8-96238-sposib-nadlishkovikh-vimiryuvan-viddali-do-nerukhomogo-obehkta.html" target="_blank" rel="follow" title="База патентів України">Спосіб надлишкових вимірювань віддалі до нерухомого об’єкта</a>
Спосіб надлишкових вимірювань віддалі до нерухомого об’єкта
Номер патенту: 90951
Опубліковано: 10.06.2010
Автори: Лимич Петро Омелянович, Кондратов Владислав Тимофійович
МПК: G01S 13/00, G01C 3/00
Мітки: нерухомого, надлишкових, об'єкта, спосіб, вимірювань, віддалі
Формула / Реферат:
1. Спосіб надлишкових вимірювань віддалі до нерухомого об'єкта, заснований на формуванні потоку інфрачервоного випромінювання заданої довжини хвилі і потужності, модуляції його опорним високочастотним сигналом заданої частоти і амплітуди, направленні модульованого потоку інфрачервоного випромінювання на досліджуваний об'єкт, що розташований на невідомій віддалі Dx, прийому відбитого від об'єкта інфрачервоного випромінювання з огинаючою, що...
Оптико-електронний спосіб надлишкових вимірювань відстані до нерухомого об`єкта
Номер патенту: 88991
Опубліковано: 10.12.2009
Автори: Муравський Олександр Володимирович, Кондратов Владислав Тимофійович
МПК: G01C 03/00
Мітки: оптико-електронний, спосіб, надлишкових, відстані, об'єкта, вимірювань, нерухомого
Формула / Реферат:
Оптико-електронний спосіб надлишкових вимірювань відстані до нерухомого об'єкта, оснований на формуванні одного чи серії нормованих за значенням вольт-секундної площі синхроімпульсів, формуванні відповідних і нормованих за значенням ват-секундної площі оптичних імпульсів у діапазоні інфрачервоного випромінювання, почерговому направленні їх на об'єкт, що розташований на нормованій за значенням відстані D0, та на досліджуваний об'єкт з...
Спосіб надлишкових вимірювань тиску
Номер патенту: 90045
Опубліковано: 25.03.2010
Автори: Кондратов Владислав Тимофійович, Редько Віталій Володимирович
МПК: G01L 11/00
Мітки: спосіб, тиску, вимірювань, надлишкових
Формула / Реферат:
Спосіб надлишкових вимірювань тиску, що полягає у формуванні направленого потоку оптичного випромінювання Ф0 у заданому діапазоні довжин хвиль, модуляції його потужності невідомим за значенням тиском рх, перетворенні потужності модульованого потоку оптичного випромінювання Фм у напругу UФ, її вимірюванні і запам'ятовуванні з подальшим визначенням дійсного значення тиску рх за рівнянням вимірювання, який відрізняється тим, що спочатку...
Спосіб надлишкових вимірювань дальності
Номер патенту: 79976
Опубліковано: 10.08.2007
Автори: Кондратов Владислав Тимофійович, Руденький Олександр Миколайович
МПК: G01C 3/00
Мітки: вимірювань, спосіб, надлишкових, дальності
Формула / Реферат:
Спосіб надлишкових вимірювань дальності, заснований на формуванні короткого імпульсного оптичного сигналу заданої тривалості, подачі його на об'єкт дослідження, фотоелектричному перетворенні сформованого та відбитого від об'єкта імпульсного оптичного сигналу, багаторазовому рециркуляційному вимірюванні дальності протягом заданого інтервалу часу з врахуванням часу...
Радіометричний спосіб надлишкових вимірювань температури об’єктів
Номер патенту: 85425
Опубліковано: 26.01.2009
Автори: Макогон Олександр Володимирович, Кондратов Владислав Тимофійович
МПК: G01J 5/00, G01K 7/00, G01N 23/00
Мітки: спосіб, вимірювань, радіометричний, об'єктів, надлишкових, температури
Формула / Реферат:
Радіометричний спосіб надлишкових вимірювань температури віддалених об'єктів в інфрачервоному діапазоні довжин хвиль, оснований на оптичному підсиленні у kп рази потужності інфрачервоного випромінювання Фx від нагрітого об'єкта, перетворенні у напруги потужностей потоків інфрачервоного випромінювання, вимірюванні та запам'ятовуванні діючих значень напруг з подальшим визначенням дійсного значення температури Tx згідно з рівнянням вимірювання,...
Попередній патент: Пристрій для ручного розливання напоїв, що піняться і/або газованих напоїв
Наступний патент: Спосіб одержання ін’єкційної форми препарату на основі альфа-ліпоєвої кислоти
Випадковий патент: Композиція вуглеводневого палива (її варіанти)