Спосіб автоматичного створення заданого призабійного простору при струговому очищенні у підземній розробці кам’яного вугілля

Формула / Реферат
1. Спосіб автоматичного створення заданого призабійного простору діючого очисного забою, що має забійний конвеєр (20), щонайменше один переміщуваний на забійному конвеєрі (20) струг (22) як очисну машину, а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля,
в якому за допомогою датчиків (17) ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11), завальному щиті (14), несучих шарнірних консолях (16) і завальній області підтримуючого перекриття (13), визначають ухил вузлів кріплення стосовно горизонталі й на основі вимірюваних даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхній рух під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласту висоту секції (10) щитового механізованого кріплення, і
в якому обчислену висоту секції (10) щитового механізованого кріплення синхронізують зі залежною від машини фіксованою висотою врізання струга (22), і
в якому для коректування виявлених відхилень виконують керування стругом (22) за висотою за допомогою наявного між секцією (10) щитового механізованого кріплення й забійним конвеєром (20) консольного керування (26),
при цьому у змісті синхронного аналізу за місцем розташування отримане значення керування стругом (22) за висотою зберігають, поки секція (10) щитового механізованого кріплення, що переміщається з тимчасовою затримкою за стругом (22), не досягне того місця, на якому струг (22) перебував на момент часу початку керування за висотою.
2. Спосіб за п. 1, в якому використовують секцію (10) щитового механізованого кріплення з роздільним опорним полозом, при цьому між обома окремими полозами (35, 36) секції (10) щитового механізованого кріплення розміщений кроковий механізм (37) секції щитового механізованого кріплення, а на обох окремих полозах (35, 36) розміщено по одному датчику (17) ухилу.
3. Спосіб за п. 2, в якому для кожного з обох окремих полозів (35, 36) на підставі вимірюваних кутів ухилу для підтримуючого перекриття (13), завального щита (14) і для правого (35) і лівого (36) окремого полоза секції (10) щитового механізованого кріплення розраховують відповідну висоту кріплення.
4. Спосіб за п. 3, в якому задану для секції (10) щитового механізованого кріплення висоту кріплення розраховують на підставі середнього значення розрахованих для обох окремих полозів (35, 36) значень висоти кріплення.
5. Спосіб за пп. 1-4, в якому на забійному конвеєрі (20) розміщають датчик (27) ухилу й визначають кут ухилу забійного конвеєра (20) у напрямку очищення.
6. Спосіб за п. 5, в якому на основі вимірюваного у напрямку очищення кута ухилу забійного конвеєра (20) визначають кут неузгодженості між підтримуючим перекриттям (13) секції (10) щитового механізованого кріплення й забійним конвеєром (20) і включають його у розрахунок створюваного стругом (22) призабійного простору.
7. Спосіб за п. 5, в якому на основі вимірюваного у напрямку очищення кута ухилу забійного конвеєра (20) визначають кут неузгодженості (α) між опорним полозом (11) секції (10) щитового механізованого кріплення або її окремих полозів (35, 36) і забійним конвеєром (20), включають його у розрахунок створюваного стругом (22) призабійного простору.
8. Спосіб за одним із пп. 1-7, в якому керування стругом (22) за висотою здійснюється консольним керуванням (26) за допомогою початку руху струга (22) під гору у напрямку очищення внаслідок захвата ґрунту пласту.
9. Спосіб за пп. 1-8, в якому керування стругом (22) за висотою відбувається за рахунок консольного керування (26) за допомогою початку руху струга (22) у гору у напрямку очищення.
10. Спосіб за пп. 1-9, в якому за допомогою визначення ухилу підтримуючого перекриття (13) секції (10) щитового механізованого кріплення у напрямку очищення визначають напрямок западин і/або сідловин у напрямку очищення й шляхом виявлених змін ухилу підтримуючого перекриття (13) протягом попередньо заданого періоду часу заздалегідь розраховують зміну призабійного простору й відповідно настроюють керування стругом (22) за висотою.
11. Спосіб за пп. 1-10, в якому за допомогою визначення ухилу окремих секцій (10) щитового механізованого кріплення поперек до напрямку очищення визначають напрямок западин і/або сідловин у напрямку подвигання забою струга (22) і настроюють керування стругом (22) за висотою таким чином, що забезпечується достатня висота проходження струга (22, 10) у секції (10) щитового механізованого кріплення.
12. Спосіб за пп. 1-11, відповідно до якого, якщо значення висоти врізання струга (22) стає менше висоти секції (10) щитового механізованого кріплення, на підставі цього обчислюють зближення, що з'явилося, і компенсують це зближення за допомогою відповідного руху струга (22) під гору з захватом ґрунту пласту.
13. Спосіб за п. 12, в якому у випадку запланованих зупинок роботи призабійний простір збільшують на розмір зближення, очікуваного протягом зупинки роботи.
14. Спосіб за п. 13, в якому споживання потужності стругового привода для струга (22) під час проходження струга (22) реєструють і записують з посиланням на окремі секції (10) щитового механізованого кріплення, а в обчислювальному блоці відбувається аналіз того, якою мірою на окремих ділянках очисного забою струг (22) при нормальному споживанні потужності переміщається у границі пласту (23) щодо ґрунту (25) пласту або чи не означає високе споживання потужності виїмку ґрунту пласту стругом (22).
15. Спосіб за пп. 1-14, в якому як датчики (17, 27) ухилу використовують датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі.
16. Спосіб за п. 15, в якому для виключення викликаних коливаннями використовуваних вузлів погрішностей визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання.
Текст
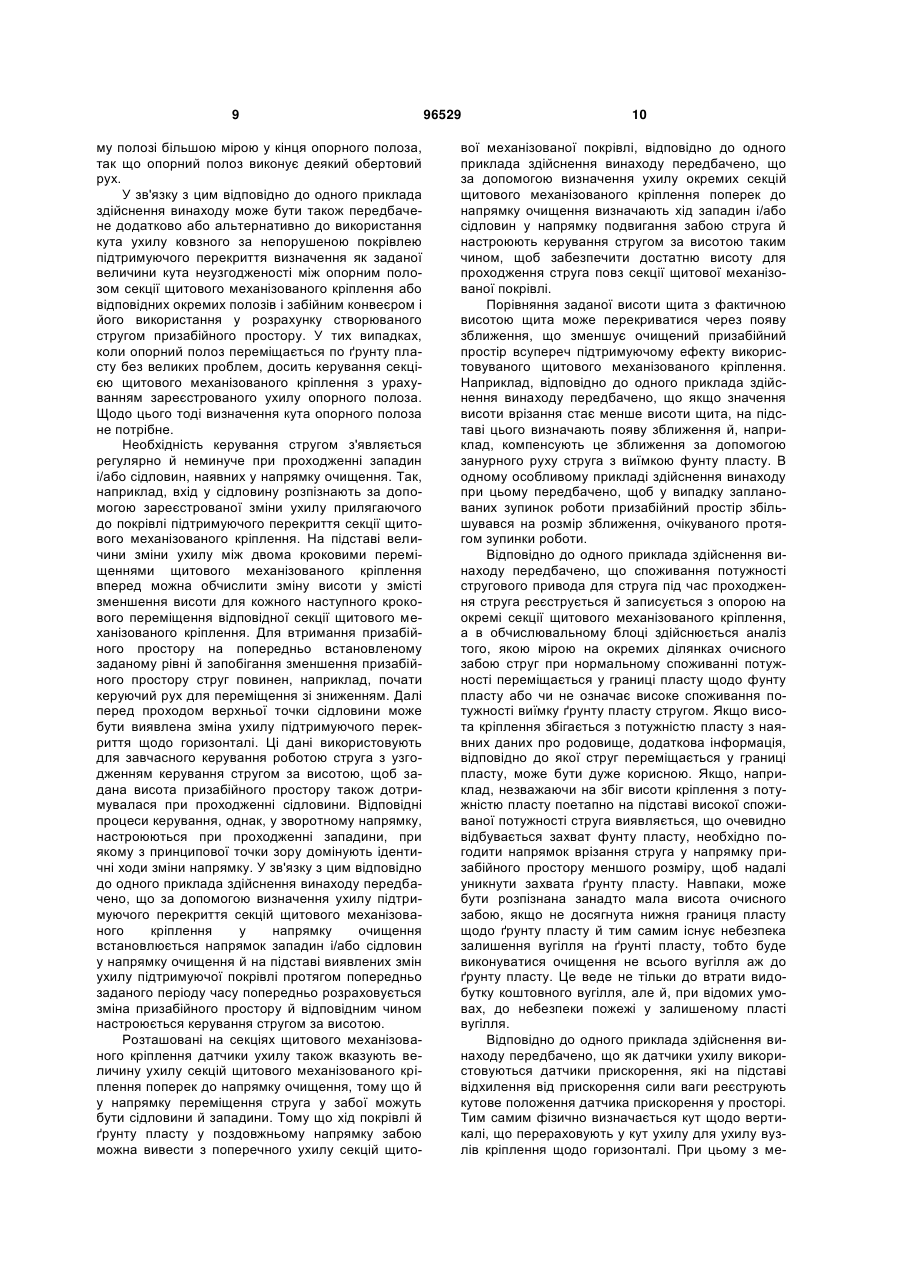
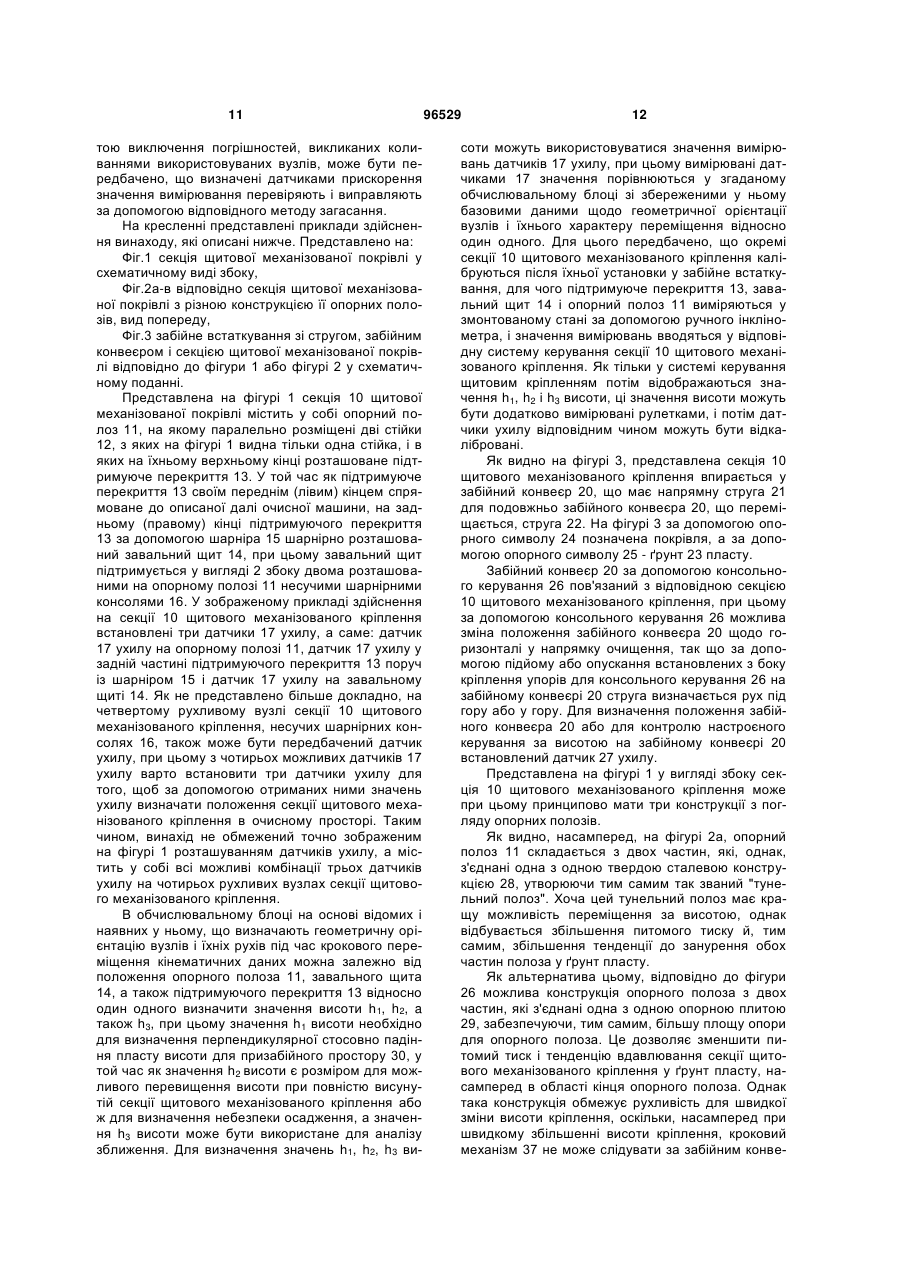
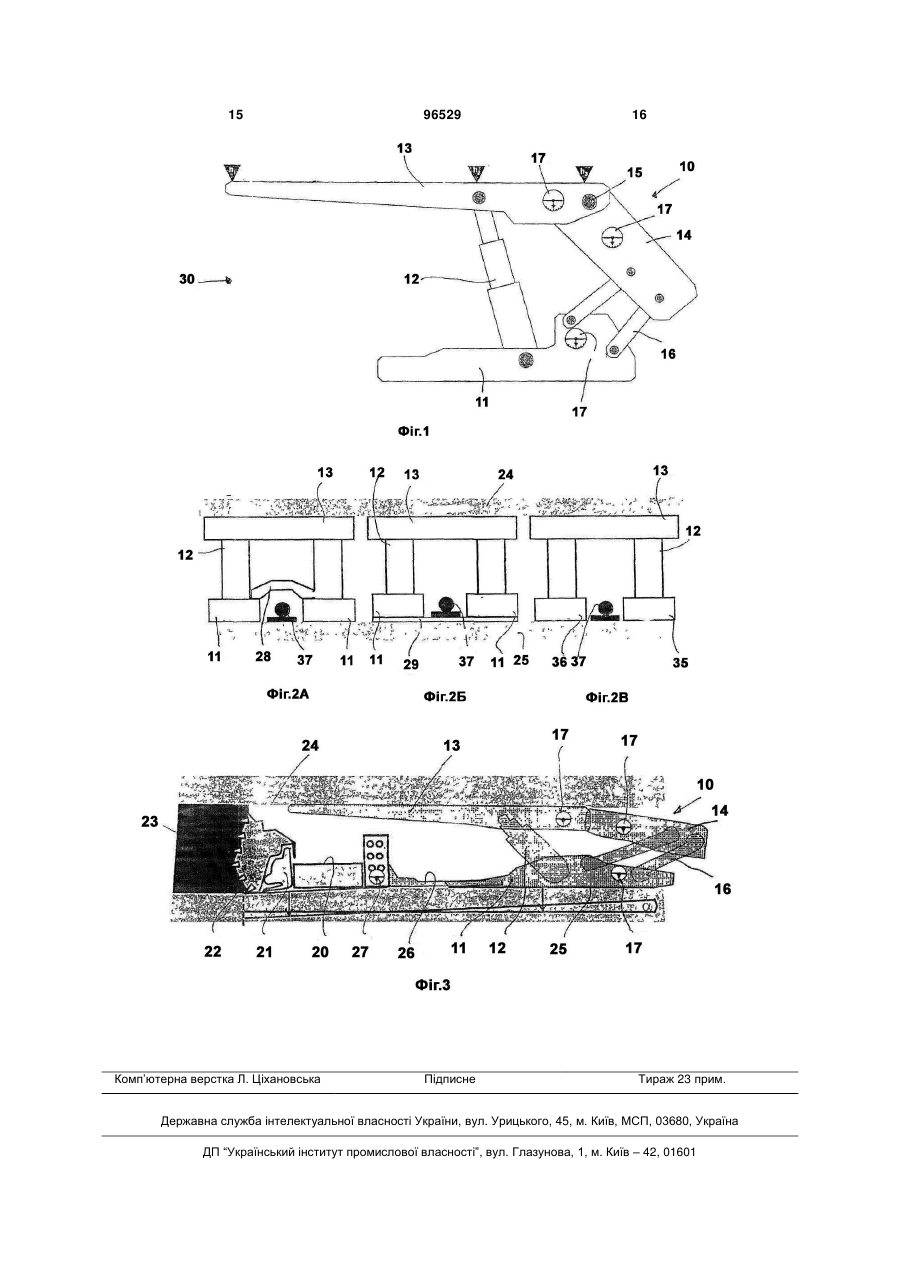
1. Спосіб автоматичного створення заданого призабійного простору діючого очисного забою, що має забійний конвеєр (20), щонайменше один переміщуваний на забійному конвеєрі (20) струг (22) як очисну машину, а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля, в якому за допомогою датчиків (17) ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11), завальному щиті (14), несучих шарнірних консолях (16) і завальній області підтримуючого перекриття (13), визначають ухил вузлів кріплення стосовно горизонталі й на основі вимірюваних даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхній рух під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласту висоту секції (10) щитового механізованого кріплення, і в якому обчислену висоту секції (10) щитового механізованого кріплення синхронізують зі залежною від машини фіксованою висотою врізання струга (22), і в якому для коректування виявлених відхилень виконують керування стругом (22) за висотою за допомогою наявного між секцією (10) щитового 2 (19) 1 3 96529 4 ним полозом (11) секції (10) щитового механізованого кріплення або її окремих полозів (35, 36) і забійним конвеєром (20), включають його у розрахунок створюваного стругом (22) призабійного простору. 8. Спосіб за одним із пп. 1-7, в якому керування стругом (22) за висотою здійснюється консольним керуванням (26) за допомогою початку руху струга (22) під гору у напрямку очищення внаслідок захвата ґрунту пласту. 9. Спосіб за пп. 1-8, в якому керування стругом (22) за висотою відбувається за рахунок консольного керування (26) за допомогою початку руху струга (22) у гору у напрямку очищення. 10. Спосіб за пп. 1-9, в якому за допомогою визначення ухилу підтримуючого перекриття (13) секції (10) щитового механізованого кріплення у напрямку очищення визначають напрямок западин і/або сідловин у напрямку очищення й шляхом виявлених змін ухилу підтримуючого перекриття (13) протягом попередньо заданого періоду часу заздалегідь розраховують зміну призабійного простору й відповідно настроюють керування стругом (22) за висотою. 11. Спосіб за пп. 1-10, в якому за допомогою визначення ухилу окремих секцій (10) щитового механізованого кріплення поперек до напрямку очищення визначають напрямок западин і/або сідловин у напрямку подвигання забою струга (22) і настроюють керування стругом (22) за висотою таким чином, що забезпечується достатня висота проходження струга (22, 10) у секції (10) щитового механізованого кріплення. 12. Спосіб за пп. 1-11, відповідно до якого, якщо значення висоти врізання струга (22) стає менше висоти секції (10) щитового механізованого кріплення, на підставі цього обчислюють зближення, що з'явилося, і компенсують це зближення за допомогою відповідного руху струга (22) під гору з захватом ґрунту пласту. 13. Спосіб за п. 12, в якому у випадку запланованих зупинок роботи призабійний простір збільшують на розмір зближення, очікуваного протягом зупинки роботи. 14. Спосіб за п. 13, в якому споживання потужності стругового привода для струга (22) під час проходження струга (22) реєструють і записують з посиланням на окремі секції (10) щитового механізованого кріплення, а в обчислювальному блоці відбувається аналіз того, якою мірою на окремих ділянках очисного забою струг (22) при нормальному споживанні потужності переміщається у границі пласту (23) щодо ґрунту (25) пласту або чи не означає високе споживання потужності виїмку ґрунту пласту стругом (22). 15. Спосіб за пп. 1-14, в якому як датчики (17, 27) ухилу використовують датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі. 16. Спосіб за п. 15, в якому для виключення викликаних коливаннями використовуваних вузлів погрішностей визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання. Винахід належить до способу автоматичного створення заданого призабійного простору діючого очисного забою, що має забійний конвеєр, щонайменше один переміщуваний на забійному конвеєрі струг як очисну машину, а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля. Одна з проблем при автоматичному керуванні роботами в очисному забої, як у напрямку виїмки, так і у напрямку подвигання забою використовуваної очисної машинискладається, зокрема, у тому, щоб, з одного боку, створити призабійний простір достатнього розміру для забезпечення проходу забійного встаткування, наприклад без зіткнень між очисною машиною й секціями щитового механізованого кріплення при проходженні очисної машини повз них, а з іншого боку, забезпечити як можна менший обвал гірської породи при очисних роботах, таким чином, по можливості обмежити виконання очисних робіт горизонтом пласту без виїмки занадто великого обсягу бічної породи. Наявні головним чином перед очисними роботами дані про родовище, що відносяться до потужності пласту, ґрунту й покрівлі пласту й наявності сідловин і/або западин, як у напрямку виїмки, так і у поздовжньому напрямку забійного встаткування, тобто у напрямку подвигання забою очисної ма шини, є занадто неточними для їхнього використання в якості опорних для автоматизованого керування роботою з очищення й установки кріплення. Особливе значення ця проблема має при так званих роботах зі струговим очищенням, при яких за закріпленою на забійному конвеєрі напрямною подовжньо фронту очисних робіт переміщається струг, що робить зворотно-поступальні рухи. При цьому оснащений різцями струг має обумовлену настроюванням фіксовану висоту врізання й порівняно малу глибину врізання порядку 60 мм, тому на відміну від очищення різанням висота врізання під час кожного очисного проходу не є змінною. При струговому очищенні керування стругом за висотою здійснюється за допомогою розміщеного між забійним конвеєром в якості нерухливої напрямної для струга й секцією щитового механізованого кріплення керуючого циліндра, що впирається у неї, як так називана система керування. Шляхом змінюваного за допомогою консольного керування ухилу забійного конвеєра можна тим самим додатково до нейтрального з погляду рівню керування також і під час переміщення для очищення додати забійному конвеєру й, там самим, що перебуває на ньому стругу занурний рух, у ході якого струг іде нижче за допомогою врізання своїх 5 нижніх різців у фунт пласту, або ж рух у гору, коли струг виконує очисну виїмку зі збільшенням висоти. Тому що при очисній роботі потрібно по можливості уникати порушення ґрунту пласту стругом, керування стругом за висотою виконується, головним чином, відповідно до відомого способу стругового очищення за границею пласту у ґрунті пласту. При цьому способі за допомогою датчика, що переміщається на рівні нижнього різця струга, визначається, чи виконує нижній різець врізання у бічну породу або у вугілля. Насамперед, цей спосіб піддається впливам з боку встаткування, тому що даний датчик і відповідний обчислювальний комп'ютер установлений в або на стругу у надзвичайно суворих умовах і тому піддається відповідним навантаженням або дефектам, що з'являються. Крім того, через постійне переміщення струга необхідне електроживлення встаткування від акумулятора й передача даних по радіо за допомогою декількох установлених в очисному забої транспондерів, при цьому дуже складно забезпечити умови для радіопередачі, особливо у низьких очисних забоях з великою часткою феромагнітних складових забійного встаткування. Крім того, цей спосіб має неточності у відомостях або також спричиняється відповідне тимчасове запізнювання при, можливо, необхідному регулюванні, тому що до деякого ступеня надійні відомості про матеріал, що зрізується стругом, одержують тільки після декількох ходів струга, тобто після декількох, як правило, не менше п'яти проходів у секції щитового механізованого кріплення. Тому в основу винаходу покладене завдання розробки способу вищезгаданого типу, за допомогою якого також і при стругових очисних роботах можлива автоматизація роботи з очищення й установки кріплення стосовно до створення заданого призабійного простору. Рішення цього завдання, включаючи кращі варіанти здійснення й удосконалення винаходу, випливає зі змісту формули винаходу, що викладена після цього опису. Для цього винахід передбачає спосіб, при якому за допомогою датчиків ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції щитового механізованого кріплення, тобто опорному полозі, завальному щиті, несучих шарнірних консолях і завальній області підтримуючого перекриття, визначають ухил вузлів кріплення стосовно горизонталі й на основі вимірюваних даних в обчислювальному блоці шляхом порівняння зі збереженими у ньому базовими даними, що визначають геометричну орієнтацію вузлів і їхнє переміщення під час крокового переміщення, розраховують відповідну перпендикулярну стосовно падіння пласту висоту секції щитового механізованого кріплення, і за яким обчислена висота секції щитового механізованого кріплення синхронізується зі залежною від машини фіксованою висотою врізання струга, і за яким для коректування виявлених відхилень виконується керування стругом за висотою за допомогою наявного між секцією щитового механізованого кріплення й забійним конвеєром консольного керування, при 96529 6 цьому у змісті синхронного аналізу за місцем розташування отримане значення керування стругом за висотою зберігається, поки секція щитового механізованого кріплення, що переміщається з тимчасовою затримкою за стругом, не досягне того місця, на якому струг перебував на момент часу початку керування за висотою. З винаходом зв'язана та перевага, що, у першу чергу, на підставі обумовленої з порівняно невеликими витратами висоти кріплення одержують параметр для системи керування забоєм з достатньою точністю й надійністю. Інший параметр складається в обумовленій через висування струга висоті врізання струга, що приблизно погоджена з очікуваною згідно з даними про родовище потужністю наявного для очисних робіт пласту. Якщо в обчислювальному блоці виявляються істотні відхилення між висотою врізання й висотою кріплення, автоматично виконується зміна управління струга за висотою за допомогою відповідного настроювання консольного керування. Тому що при струговому очищенні є значна відстань між слідом врізання струга й кінцем опорного полоза або окремих полозів утворююче шарнірне з'єднання для консольного керування секції щитової механізованої покрівлі, з'являється час запізнювання регулювання відповідної тривалості, поки не з'явиться реакція висоти кріплення, отриманої на секції щитової механізованої покрівлі, на ініційований забійним конвеєром імпульс керування за висотою. При цьому повна реакція висоти кріплення проявляється тільки через 5-7 крокових переміщень після появи імпульсу керування за висотою для струга. Тільки тоді за допомогою синхронізації висоти врізання й висоти кріплення або за допомогою визначення положення секції щитового механізованого кріплення у просторі, а тим самим і призабійного простору, можна перевірити, якою мірою виконана зміна керування стругом за висотою веде до компенсації розпізнаного відхилення й до зміни призабійного простору. Під час проходження шляху від місця розміщення опорного полоза секції щитового механізованого кріплення, де була почата зміна положення за висотою, до нового місця розміщення опорного полоза, на якому опорний полоз досягає очищеної стругом зі зміненим керуванням за висотою області, не слід уживати зміну початого керування за висотою, хоча під час цього шляху зберігається виявлене відхилення. Тому відповідно до винаходу передбачено, щоб ініційоване керування стругом за висотою зберігалося у змісті синхронного аналізу за місцем розташування, поки секція, що переміщається з тимчасовою затримкою за стругом, щитового механізованого кріплення не досягне того місця, на якому струг перебував на момент часу початку керування за висотою. Завдяки таким мірам відповідно до винаходу можливе одержання відомостей про те, чи відповідає звільнена стругом висота врізання також і наступній висоті кріплення у цьому місці, або ж можлива помилкова покрівля, що з'являється, або зближення, що відбувається, ведуть до відхилень висоти кріплення нагору або донизу від висоти врізання, які варто враховувати при наступному 7 переміщенні струга за допомогою зміни керування стругом за висотою. Те ж саме таке відноситься до проходження западин і/або сідловин. Відповідно до цього у відповідному винаходу способі використовують, головним чином, отриману висоту кріплення, щоб з урахуванням висоти врізання струга забезпечити ланцюг автоматичного регулювання для керування роботою з очищення й установки кріплення, що при застосуванні цього ланцюга веде до автоматичного дотримання заданого призабійного простору. При цьому з урахуванням мети як індикатор висоти забою можна застосовувати перпендикулярну стосовно падіння пласту висоту кріплення між верхнім краєм перекриття й нижнім краєм опорного полоза. Як керуючу величину для керування висотою відповідної секції щитового механізованого кріплення також підходить висота кріплення в області верхньої частини щитового кріплення, тому що в іншому випадку відносний кут між підтримуючим перекриттям і опорним полозом в окремих фазах узгодження висоти веде до сильних змін висоти щодо краю перекриття. Тому може бути доцільним визначити висоту кріплення між підтримуючим перекриттям і опорним полозом у будь-яких місцях і використовувати для відповідного способу найбільше доцільне місце для керування за висотою. У рамках керування регулювальну характеристику системи оптимізують за допомогою наявних в обчислювальному блоці здатних до самонавчання алгоритмів, тому що чисто геометричний інкрементальний метод не може відобразити всі ефекти, що з'являються на практиці, наприклад, стан нижніх різців, реакції струга на керування при різних властивостях ґрунту пласту, вплив переміщення у гору, механічний цикл машинного встаткування. Тому у рамках автоматизованого керування виконується перевірка того, чи дійсно досягається запланований у результаті зміни керування стругом за висотою призабійний простір, і враховуються відхилення між цільовим заданим значенням початої зміни керування за висотою й фактично одержаним призабійним простором при розрахунку й вказівці наступних змін керування за висотою. Відповідно до одного приклада здійснення винаходу передбачено, що також використовуються секції щитового механізованого кріплення з роздільними опорними полозами, в яких між обома окремими полозами розміщений крокуючий механізм секції щитового механізованого кріплення, так що обоє окремих полоза секції щитового механізованого кріплення, на відміну від з'єднаних один з одним полозів, можуть втягуватися окремо один від одного, що уможливлює так званий "слонячий крок" як крокове керування. При таких секціях щитового механізованого кріплення, що використовуються, насамперед, у типових для стругового очищення пластах невеликої потужності, на обох окремих полозах встановлюється по одному датчику ухилу. Для цього можна передбачити, що для кожного з обох окремих полозів розраховується відповідна висота кріплення на підставі вимірюваного кутів ухилу для підтримуючого перекриття, зава 96529 8 льного щита й для правого й лівого окремого полоза секції щитового механізованого кріплення, при цьому можна передбачити, що визначена для секції щитового механізованого кріплення висота кріплення розраховується на основі середнього значення з розрахованих для обох окремих полозів значень висоти кріплення. Однак для розпізнавання обумовлених насадками стійок проблем або для оцінки того, чи досягнута верхня границя установки секції щитового механізованого кріплення, потрібен окремий аналіз висоти кріплення для правої й лівої половини кріплення на основі кутів нахилу, визначених на окремих полозах. Тому відповідно до одного приклада здійснення винаходу передбачено, щоб на забійному конвеєрі був розміщений датчик ухилу й визначався кут ухилу забійного конвеєра у напрямку очищення, а розміщений на забійному конвеєрі датчик ухилу вказує керуючий напрямок струга й надає, таким чином, основу для окремих кроків керування. Насамперед, відповідно до одного приклада здійснення винаходу передбачено, що на підставі вимірюваного у напрямку очищення кута ухилу забійного конвеєра обчислюється кут неузгодженості між підтримуючим перекриттям секції щитової механізованої покрівлі й забійним транспортером і використовується для розрахунку створюваного стругом призабійного простору. Завдяки наданню кута узгодження можливе одержання відомостей про те, чи збільшиться або зменшиться призабійний простір під час наступних очисних проходів або крокових переміщень кріплення, а тим самим можливо, настроїти керування стругом за висотою таким чином, щоб була отримана попередньо встановлена задана висота забійного простору. На підставі передбаченого відповідно до винаходу постійного контролю фактичної висоти кріплення можна під час проходження струга повз секції щитового механізованого кріплення перевіряти, чи дотримується створюваний стругом призабійний простір відповідно до заданої висоти щита, або ж чи з'являються відхилення нагору або донизу. Відповідно до цих відхилень можна зробити автоматичне керування стругом за висотою, при цьому для виконання керування стругом за висотою відповідно до прикладів здійснення винаходу можливо за вже відомим методом виконання руху струга у напрямку очищення, як під гору, так і у гору за допомогою дій консольного керування. Таким чином, з'являється перевага у тому, що спосіб керування за висотою для струга здійснюється за цілою і, як правило, не ушкодженою протягом своєї границі пласту покрівлі, у той час як опорний полоз найчастіше переміщається не по природному ґрунту пласту, а уздовж очищеного нижніми різцями струга горизонта. Крім того, при установці секції щитового механізованого кріплення через високий питомий тиск опорного полоза з піком тиску, що проявляється рядом з кінцем опорного полоза, найчастіше відбувається занурення у штучно створений ґрунт пласту. При цьому занурення опорного полоза відбувається не паралельно положенню, а через розподіл тиску на опорно 9 му полозі більшою мірою у кінця опорного полоза, так що опорний полоз виконує деякий обертовий рух. У зв'язку з цим відповідно до одного приклада здійснення винаходу може бути також передбачене додатково або альтернативно до використання кута ухилу ковзного за непорушеною покрівлею підтримуючого перекриття визначення як заданої величини кута неузгодженості між опорним полозом секції щитового механізованого кріплення або відповідних окремих полозів і забійним конвеєром і його використання у розрахунку створюваного стругом призабійного простору. У тих випадках, коли опорний полоз переміщається по ґрунту пласту без великих проблем, досить керування секцією щитового механізованого кріплення з урахуванням зареєстрованого ухилу опорного полоза. Щодо цього тоді визначення кута опорного полоза не потрібне. Необхідність керування стругом з'являється регулярно й неминуче при проходженні западин і/або сідловин, наявних у напрямку очищення. Так, наприклад, вхід у сідловину розпізнають за допомогою зареєстрованої зміни ухилу прилягаючого до покрівлі підтримуючого перекриття секції щитового механізованого кріплення. На підставі величини зміни ухилу між двома кроковими переміщеннями щитового механізованого кріплення вперед можна обчислити зміну висоти у змісті зменшення висоти для кожного наступного крокового переміщення відповідної секції щитового механізованого кріплення. Для втримання призабійного простору на попередньо встановленому заданому рівні й запобігання зменшення призабійного простору струг повинен, наприклад, почати керуючий рух для переміщення зі зниженням. Далі перед проходом верхньої точки сідловини може бути виявлена зміна ухилу підтримуючого перекриття щодо горизонталі. Ці дані використовують для завчасного керування роботою струга з узгодженням керування стругом за висотою, щоб задана висота призабійного простору також дотримувалася при проходженні сідловини. Відповідні процеси керування, однак, у зворотному напрямку, настроюються при проходженні западини, при якому з принципової точки зору домінують ідентичні ходи зміни напрямку. У зв'язку з цим відповідно до одного приклада здійснення винаходу передбачено, що за допомогою визначення ухилу підтримуючого перекриття секцій щитового механізованого кріплення у напрямку очищення встановлюється напрямок западин і/або сідловин у напрямку очищення й на підставі виявлених змін ухилу підтримуючої покрівлі протягом попередньо заданого періоду часу попередньо розраховується зміна призабійного простору й відповідним чином настроюється керування стругом за висотою. Розташовані на секціях щитового механізованого кріплення датчики ухилу також вказують величину ухилу секцій щитового механізованого кріплення поперек до напрямку очищення, тому що й у напрямку переміщення струга у забої можуть бути сідловини й западини. Тому що хід покрівлі й ґрунту пласту у поздовжньому напрямку забою можна вивести з поперечного ухилу секцій щито 96529 10 вої механізованої покрівлі, відповідно до одного приклада здійснення винаходу передбачено, що за допомогою визначення ухилу окремих секцій щитового механізованого кріплення поперек до напрямку очищення визначають хід западин і/або сідловин у напрямку подвигання забою струга й настроюють керування стругом за висотою таким чином, щоб забезпечити достатню висоту для проходження струга повз секції щитової механізованої покрівлі. Порівняння заданої висоти щита з фактичною висотою щита може перекриватися через появу зближення, що зменшує очищений призабійний простір всупереч підтримуючому ефекту використовуваного щитового механізованого кріплення. Наприклад, відповідно до одного приклада здійснення винаходу передбачено, що якщо значення висоти врізання стає менше висоти щита, на підставі цього визначають появу зближення й, наприклад, компенсують це зближення за допомогою занурного руху струга з виїмкою фунту пласту. В одному особливому прикладі здійснення винаходу при цьому передбачено, щоб у випадку запланованих зупинок роботи призабійний простір збільшувався на розмір зближення, очікуваного протягом зупинки роботи. Відповідно до одного приклада здійснення винаходу передбачено, що споживання потужності стругового привода для струга під час проходження струга реєструється й записується з опорою на окремі секції щитового механізованого кріплення, а в обчислювальному блоці здійснюється аналіз того, якою мірою на окремих ділянках очисного забою струг при нормальному споживанні потужності переміщається у границі пласту щодо фунту пласту або чи не означає високе споживання потужності виїмку ґрунту пласту стругом. Якщо висота кріплення збігається з потужністю пласту з наявних даних про родовище, додаткова інформація, відповідно до якої струг переміщається у границі пласту, може бути дуже корисною. Якщо, наприклад, незважаючи на збіг висоти кріплення з потужністю пласту поетапно на підставі високої споживаної потужності струга виявляється, що очевидно відбувається захват фунту пласту, необхідно погодити напрямок врізання струга у напрямку призабійного простору меншого розміру, щоб надалі уникнути захвата ґрунту пласту. Навпаки, може бути розпізнана занадто мала висота очисного забою, якщо не досягнута нижня границя пласту щодо ґрунту пласту й тим самим існує небезпека залишення вугілля на ґрунті пласту, тобто буде виконуватися очищення не всього вугілля аж до ґрунту пласту. Це веде не тільки до втрати видобутку коштовного вугілля, але й, при відомих умовах, до небезпеки пожежі у залишеному пласті вугілля. Відповідно до одного приклада здійснення винаходу передбачено, що як датчики ухилу використовуються датчики прискорення, які на підставі відхилення від прискорення сили ваги реєструють кутове положення датчика прискорення у просторі. Тим самим фізично визначається кут щодо вертикалі, що перераховують у кут ухилу для ухилу вузлів кріплення щодо горизонталі. При цьому з ме 11 тою виключення погрішностей, викликаних коливаннями використовуваних вузлів, може бути передбачено, що визначені датчиками прискорення значення вимірювання перевіряють і виправляють за допомогою відповідного методу загасання. На кресленні представлені приклади здійснення винаходу, які описані нижче. Представлено на: Фіг.1 секція щитової механізованої покрівлі у схематичному виді збоку, Фіг.2а-в відповідно секція щитової механізованої покрівлі з різною конструкцією її опорних полозів, вид попереду, Фіг.3 забійне встаткування зі стругом, забійним конвеєром і секцією щитової механізованої покрівлі відповідно до фігури 1 або фігурі 2 у схематичному поданні. Представлена на фігурі 1 секція 10 щитової механізованої покрівлі містить у собі опорний полоз 11, на якому паралельно розміщені дві стійки 12, з яких на фігурі 1 видна тільки одна стійка, і в яких на їхньому верхньому кінці розташоване підтримуюче перекриття 13. У той час як підтримуюче перекриття 13 своїм переднім (лівим) кінцем спрямоване до описаної далі очисної машини, на задньому (правому) кінці підтримуючого перекриття 13 за допомогою шарніра 15 шарнірно розташований завальний щит 14, при цьому завальний щит підтримується у вигляді 2 збоку двома розташованими на опорному полозі 11 несучими шарнірними консолями 16. У зображеному прикладі здійснення на секції 10 щитового механізованого кріплення встановлені три датчики 17 ухилу, а саме: датчик 17 ухилу на опорному полозі 11, датчик 17 ухилу у задній частині підтримуючого перекриття 13 поруч із шарніром 15 і датчик 17 ухилу на завальному щиті 14. Як не представлено більше докладно, на четвертому рухливому вузлі секції 10 щитового механізованого кріплення, несучих шарнірних консолях 16, також може бути передбачений датчик ухилу, при цьому з чотирьох можливих датчиків 17 ухилу варто встановити три датчики ухилу для того, щоб за допомогою отриманих ними значень ухилу визначати положення секції щитового механізованого кріплення в очисному просторі. Таким чином, винахід не обмежений точно зображеним на фігурі 1 розташуванням датчиків ухилу, а містить у собі всі можливі комбінації трьох датчиків ухилу на чотирьох рухливих вузлах секції щитового механізованого кріплення. В обчислювальному блоці на основі відомих і наявних у ньому, що визначають геометричну орієнтацію вузлів і їхніх рухів під час крокового переміщення кінематичних даних можна залежно від положення опорного полоза 11, завального щита 14, а також підтримуючого перекриття 13 відносно один одного визначити значення висоти h1, h2, a також h3, при цьому значення h1 висоти необхідно для визначення перпендикулярної стосовно падіння пласту висоти для призабійного простору 30, у той час як значення h2 висоти є розміром для можливого перевищення висоти при повністю висунутій секції щитового механізованого кріплення або ж для визначення небезпеки осадження, а значення h3 висоти може бути використане для аналізу зближення. Для визначення значень h1, h2, h3 ви 96529 12 соти можуть використовуватися значення вимірювань датчиків 17 ухилу, при цьому вимірювані датчиками 17 значення порівнюються у згаданому обчислювальному блоці зі збереженими у ньому базовими даними щодо геометричної орієнтації вузлів і їхнього характеру переміщення відносно один одного. Для цього передбачено, що окремі секції 10 щитового механізованого кріплення калібруються після їхньої установки у забійне встаткування, для чого підтримуюче перекриття 13, завальний щит 14 і опорний полоз 11 виміряються у змонтованому стані за допомогою ручного інклінометра, і значення вимірювань вводяться у відповідну систему керування секції 10 щитового механізованого кріплення. Як тільки у системі керування щитовим кріпленням потім відображаються значення h1, h2 і h3 висоти, ці значення висоти можуть бути додатково вимірювані рулетками, і потім датчики ухилу відповідним чином можуть бути відкалібровані. Як видно на фігурі 3, представлена секція 10 щитового механізованого кріплення впирається у забійний конвеєр 20, що має напрямну струга 21 для подовжньо забійного конвеєра 20, що переміщається, струга 22. На фігурі 3 за допомогою опорного символу 24 позначена покрівля, а за допомогою опорного символу 25 - ґрунт 23 пласту. Забійний конвеєр 20 за допомогою консольного керування 26 пов'язаний з відповідною секцією 10 щитового механізованого кріплення, при цьому за допомогою консольного керування 26 можлива зміна положення забійного конвеєра 20 щодо горизонталі у напрямку очищення, так що за допомогою підйому або опускання встановлених з боку кріплення упорів для консольного керування 26 на забійному конвеєрі 20 струга визначається рух під гору або у гору. Для визначення положення забійного конвеєра 20 або для контролю настроєного керування за висотою на забійному конвеєрі 20 встановлений датчик 27 ухилу. Представлена на фігурі 1 у вигляді збоку секція 10 щитового механізованого кріплення може при цьому принципово мати три конструкції з погляду опорних полозів. Як видно, насамперед, на фігурі 2а, опорний полоз 11 складається з двох частин, які, однак, з'єднані одна з одною твердою сталевою конструкцією 28, утворюючи тим самим так званий "тунельний полоз". Хоча цей тунельний полоз має кращу можливість переміщення за висотою, однак відбувається збільшення питомого тиску й, тим самим, збільшення тенденції до занурення обох частин полоза у ґрунт пласту. Як альтернатива цьому, відповідно до фігури 26 можлива конструкція опорного полоза з двох частин, які з'єднані одна з одною опорною плитою 29, забезпечуючи, тим самим, більшу площу опори для опорного полоза. Це дозволяє зменшити питомий тиск і тенденцію вдавлювання секції щитового механізованого кріплення у ґрунт пласту, насамперед в області кінця опорного полоза. Однак така конструкція обмежує рухливість для швидкої зміни висоти кріплення, оскільки, насамперед при швидкому збільшенні висоти кріплення, кроковий механізм 37 не може слідувати за забійним конве 13 єром, що швидко нахиляється, тому що кроковий механізм у цьому випадку прилягає до цільної несучої основи 29, що обмежує можливість коректування висоти. Нарешті, на фігурі 2в представлена конструкція, яка переважно знаходить застосування у струговому очищенні у пластах невеликої потужності, приблизно менше 1,5 м. У такому варіанті здійснення передбачені роздільні окремі полози 35 і 36, між якими кроковий механізм 37 розташований таким чином, що правий окремий полоз 35 може підніматися у напрямку кроку незалежно від лівого окремого полоза 36. Такий поділ на окремі полози 35 і 36 забезпечує крокове переміщення секції 10 щитового механізованого кріплення, використовуючи так званий "слонячий крок", за допомогою якого можна протидіяти зануренню окремих полозів 35 і 36 у ґрунт пласту 25 і нагромадженню й навалюванню навалу відбитої копалини перед окремими полозами 35, 36. Без відповідних мір, при визначених робочих умовах такий навал відбитої копалини недостатньо швидко переміщався б у напрямку обваленої смуги гірських порід, що привело б до збільшення перешкод для крокового руху або ж у стадії, що далеко зайшла, навіть до його затримки. При кроковому переміщенні секція 10 щитового механізованого кріплення за рахунок втягування обох її стійок 12 спочатку розвантажується. Однак потім з'єднана з окремим полозом стійка витягається, так що відповідний окремий полоз піднімається далі й при переміщенні вперед секції щитового механізованого кріплення може насунутися ковзним рухом на лежачий на ґрунті пласту навал відбитої копалини. При установці кріплення відповідний окремий полоз перебуває на більше високому рівні. Потім, при наступному кроковому переміщенні такий же цикл повторюється для іншого окремого полоза на іншій стороні, так що окремі крокові переміщення відбуваються у вигляді "кроку, що топче". За такою же технологією також можливо знову підняти нагору на рівень ґрунту поринулий у ґрунт пласту окремий полоз. На фігурі 3 схематично представлено, що підтримуюче перекриття 13 прилягає до непорушеної покрівлі 24 пласту 23. Винятково для наочного подання керування за висотою на фігурі 3 в якості прикладу показано, що у видному на фігурі 3 положенні струга 22 надане переміщення з нахилом під гору, для чого забійний конвеєр 20 був злегка піднятий консольним керуванням 26. Струг 22 легко врізається у ґрунт 25 пласту, так що в опорного полоза 11, який ще перебуває на первісному рівні ґрунту 25 пласту, секції 10 щитового механізованого кріплення 10 виникає кут неузгодженості щодо вибраного стругом 22 рівня ґрунту пласту. На основі цього кута неузгодженості і визначеного датчиками 17 ухилу на секції 10 щитового механізованого кріплення положення вузлів кріплення 96529 14 можна розрахувати зміну призабійного простору при подальших очисних проходах струга 22. На підставі безперервного спостереження за поточною висотою кріплення або її динамікою по осі часу можна, відповідно, визначити, чи відповідає висота кріплення в області очисного забою потужності пласту 23, отриманої з наявних даних про родовище, а саме з урахуванням інформації з настроєного на стругу 22 розпізнавання границі пласту, чи врізається струг 22 у бічну породу, переважно у ґрунт 25 пласту або ж ні. З урахуванням всіх трьох наборів даних можна тим самим забезпечити надійну базу для керування роботою з очищення й установки кріплення. Тому керування стругом 22 за висотою виконується таким чином, що, з однієї сторони, щоб уникнути врізання у покрівлю 24 і, з іншого боку, контакту з підтримуючим перекриттям 13 окремої секції 10 щитового механізованого кріплення 10 забійного встаткування, можна настроїти датчики так, щоб розпізнавати такого роду небажані контакти струга 22, оскільки визначення контактів такого роду може бути додатково виконане в якості даних керування у керуванні процесом. Так, наприклад, при проходженні струга 22 у секції 10 щитового механізованого кріплення можливе розпізнавання контакту з підтримуючим перекриттям або козирком кріплення, тому що, по-перше, пік потужності стругового привода сигналізує про (гальмуючий) контакт струга 22, швидко піднімається тиск циліндра консолі між забійним конвеєром 20 і секцією 10 щитового механізованого кріплення внаслідок підвищення протидіючого моменту, шлях відповідного циліндра консолі внаслідок підвищеного протидіючого моменту сигналізує про швидке еластичне відсунення довжиною більше звичайного шляху й/або датчик 27 ухилу на забійному конвеєрі 20 випробовує швидку зміну кута з сильним прискоренням. За допомогою описаних вище індикаторів можна тим самим розпізнати контакт верхніх різців струга 22 з підтримуючим перекриттям або козирком кріплення, що є доцільним для керування роботою з очищення й установки кріплення, особливо при малих потужностях пласту, тому що при виникненні таких контактів можна автоматично встановити керування стругом за висотою на початок поглибного руху, так що, при відомих умовах, небажаних контактів такого роду з підтримуючим перекриттям або козирком кріплення можна уникнути шляхом виїмки ґрунту пласту. Розкриті у вищевикладеному описі, формулі винаходу й резюме ознаки предмета даної документації, як окремо, так і у будь-яких комбінаціях один з одним можуть мати істотне значення для здійснення винаходу в його різних конструктивних формах здійснення. 15 Комп’ютерна верстка Л. Ціхановська 96529 Підписне 16 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automatically formation of a defined face opening at plow longwall mining operations in underground coal mining
Автори англійськоюJunker, Martin, Mozar, Armin
Назва патенту російськоюСпособ автоматического создания заданного призабойного пространства при струговой очистке при подземной разработке каменного угля
Автори російськоюЮнкер Мартин, Моцар Армин
МПК / Мітки
МПК: E21C 35/14, E21C 35/24, E21D 23/00, E21D 23/12
Мітки: підземний, призабійного, створення, струговому, простору, очищенні, спосіб, кам'яного, вугілля, заданого, розробці, автоматичного
Код посилання
<a href="https://ua.patents.su/8-96529-sposib-avtomatichnogo-stvorennya-zadanogo-prizabijjnogo-prostoru-pri-strugovomu-ochishhenni-u-pidzemnijj-rozrobci-kamyanogo-vugillya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного створення заданого призабійного простору при струговому очищенні у підземній розробці кам’яного вугілля</a>
Спосіб автоматичного створення заданого призабійного простору при очисних забійних роботах у підземній розробці кам’яного вугілля
Номер патенту: 96527
Опубліковано: 10.11.2011
Автори: Моцар Армін, Юнкер Мартін
МПК: E21D 23/12, E21C 35/24, E21C 35/14, E21D 23/00, E21C 41/16
Мітки: кам'яного, призабійного, підземний, розробці, автоматичного, роботах, вугілля, створення, забійних, спосіб, простору, заданого, очисних
Формула / Реферат:
1. Спосіб автоматичного створення заданого призабійного простору при роботах очисного забою, що має забійний конвеєр (20), щонайменше одну очисну машину (22), а також гідравлічне щитове механізоване кріплення, у підземній розробці кам'яного вугілля, в якому:за допомогою датчиків (17) ухилу, розміщених щонайменше на трьох із чотирьох основних вузлів кожної секції (10) щитового механізованого кріплення, тобто опорному полозі (11),...
Запобіжне кріплення для призабійного простору
Номер патенту: 14963
Опубліковано: 04.03.1997
Автори: Петік Володимир Васильович, Борщук Олександр Львович, Лопат'єв Ігор Константинович, Щербатюк Георгій Якович, Сахарчук Віктор Петрович, Вольфсон Павло Михайлович
МПК: E21D 19/00
Мітки: простору, призабійного, запобіжне, кріплення
Формула / Реферат:
Защитная крепь для призабойного пространства, включающая рамы постоянной арочной крепи, состоящие из арок боковых сегментов, центральных и боковых стяжек, несущий элемент выдвижной крепи, сегмент арочной крепи, затяжку и крепежный замок, отличающаяся тем, что несущий элемент размещен под центральной стяжкой и связан с ней общим крепежным замком в виде шарнирно соединенных скоб с фигурными планками, в одной из которых размещена арка и...
Пристрій для перевантаження породи при підземній розробці вугільних родовищ
Номер патенту: 4619
Опубліковано: 28.12.1994
Автори: Труфанов Валерій Олексійович, Галкін Микола Олександрович, Нестеренко Микола Іванович, Овчинніков Віталій Пилипович, Руденко Анатолій Павлович, Глухов Георгій Іванович, Ружелович Петро Степанович
МПК: E21C 41/18
Мітки: родовищ, розробці, пристрій, вугільних, підземний, перевантаження, породи
Формула / Реферат:
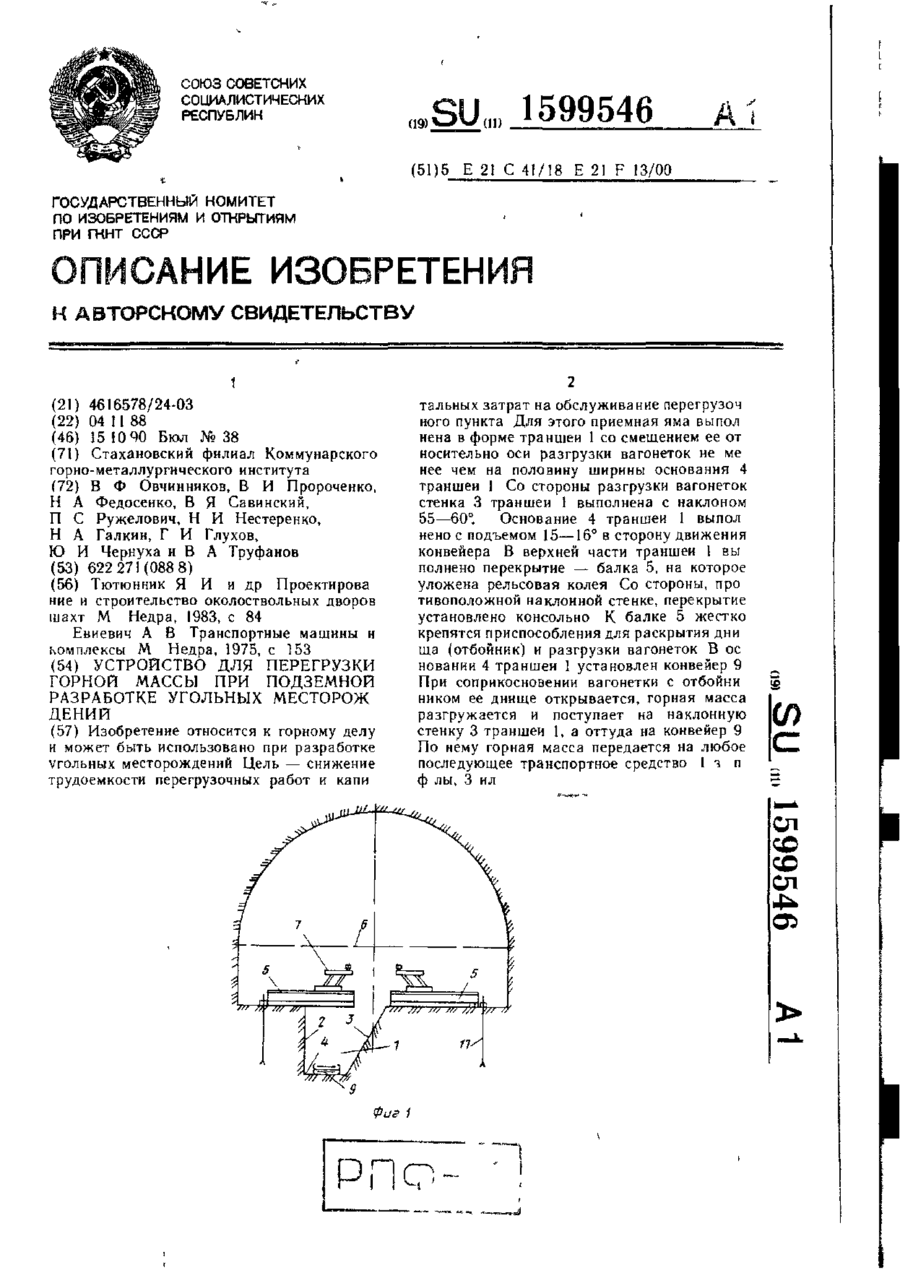
1. Устройство для перегрузки породы при подземной разработке угольных месторождений, включающее приемную траншею с наклонной со стороны разгрузки стенкой, перекрытие в верхней части траншеи, выполненное в виде балок, установленных под рельсовым путем, вагонетки, конвейер, расположенный на днище приемной траншеи, и приспособление для разгрузки вагонеток раскрытием их днищ, отличающееся тем, что приемная траншея пройдена перпендикулярно к...
Пристрій для перевантаження гірничої маси при підземній розробці вугільних родовищ
Номер патенту: 148
Опубліковано: 30.04.1993
Автори: Овчинніков Віталій Пилипович, Савінський Віктор Якович, Глухов Георгій Іванович, Труфанов Валерій Олексійович, Нестеренко Микола Іванович, Ружелович Петро Степанович, Пророченко Валерій Іванович, Чернуха Юрій Іванович, Галкін Микола Олександрович, Федосенко Микола Андрійович
МПК: E21F 13/00, E21C 41/18
Мітки: розробці, підземний, родовищ, гірничої, вугільних, маси, пристрій, перевантаження
Формула / Реферат:
Формула изобретения1. Устройство для перегрузки горной массы при подземной разработке угольных месторождений, включающее приемную яму с перекрытием в верхней ее части, рельсовую колею, уложенную на перекрытии, конвейер, установленный в основании приемной ямы, и приспособления для раскрытия днища и разгрузки вагонеток, жестко соединенные с перекрытием, отличающееся тем, что, с целью снижения трудоемкости перегрузочных работ и...
Спосіб створення бурової свердловини у підземній формації
Номер патенту: 39104
Опубліковано: 15.06.2001
Автори: Уорролл Роберт Ніколас, Лобек Вільгельмус Крістіанус Марія, Чоут Пол Роджерсон, Доннеллі Мартін
МПК: E21B 43/10
Мітки: підземний, формації, бурової, створення, свердловини, спосіб
Формула / Реферат:
1. Способ создания буровой скважины в подземной формации, при котором бурят скважину в подземной формации, опускают обсадную трубу из материала, способного деформироваться в холодном состоянии, в буровую скважину и радиально расширяют обсадную трубу относительно стенки буровой скважины посредством приложения радиальной нагрузки к обсадной трубе и устраняют нагрузку из обсадной трубы, отличающийся тем, что радиальную нагрузку выбирают так,...
Попередній патент: Спосіб керування роботами очисного забою
Наступний патент: Спосіб виявлення меж зерен на поверхні полікристалічного зразка
Випадковий патент: Портальна мийка