Спосіб керування механізованими видобуваннями за допомогою розпізнавання примежового шару

Формула / Реферат
1. Спосіб керування механізованими видобуваннями при підземній розробці родовищ кам'яного вугілля, який включає використання забійного конвеєра (20), щонайменше однієї видобувної машини (22), а також гідравлічного щитового механізованого кріплення, при якому шум, що виробляється від врізання видобувної машини (21) у вугілля (35) і/або бічну породу (28, 29) приймається за допомогою щонайменше одного сенсора (17) у вигляді відповідних даних коливання від корпусного шуму, який відрізняється тим, що сенсор розташований в секції механізованого щитового кріплення (10), і заруб видобувної машини (22) у бічну породу (28, 29) визначається за допомогою даних коливань, які переносяться у горизонті бічної породи від місця врізання видобувної машини (22) до пристрою секції механізованого щитового кріплення (10) у бічній породі і які приймаються сенсором (17).
2. Спосіб за пунктом 1, при якому сенсор нахилу (17), розташований в опорній лижі (11) і/або висячому верхняку (13) секції механізованого щитового кріплення (10) і виконаний як давач прискорення з високою чутливістю, пристосований для реєстрації даних корпусного шуму.
3. Спосіб за пунктом 1 або 2, при якому розташований на опорній лижі (11) і/або висячому верхняку (13) секції механізованого щитового кріплення (10) мікрофон корпусного шуму пристосований для реєстрації даних корпусного шуму.
4. Спосіб за одним з пунктів від 1 до 3, при якому видобувна машина сконструйована як очисний комбайн з барабанним виконавчим органом (22) і у щонайменше одному барабані (23, 24) додатково до видобувних різців (33) розташовані особливі сигнальні різці (34), які посилюють звук, що з'являється при вході різців у бічну породу, і з зареєстрованого часу врізання окремих сигнальних різців (34) у бічну породу (28, 29) у обчислювальному пристрої розраховується глибина втручання барабана (23, 24) у бічну породу (28, 29).
5. Спосіб за пунктом 4, при якому сигнальні різці (34) мають збільшений радіус різання.
6. Спосіб за пунктом 4, при якому сигнальні різці (34) мають геометрію різця, яка відрізняється від геометрії видобувних різців (33).
7. Спосіб за пунктом 4, при якому сигнальні різці (34) при врізанні у бічну породу (28, 29) утримуються в особливих тримачах різців, що мають власну частоту, яка посилює шум сигнальних різців.
8. Спосіб за одним з пунктів від 1 до 7, при якому прийняті дані корпусного шуму оцінюються за допомогою частотного аналізу.
9. Спосіб за одним з пунктів від 1 до 8, при якому у видобувній машині (22) розташований сенсор (26) для встановлення місцезнаходження видобувної машини (22) в лаві.
Текст
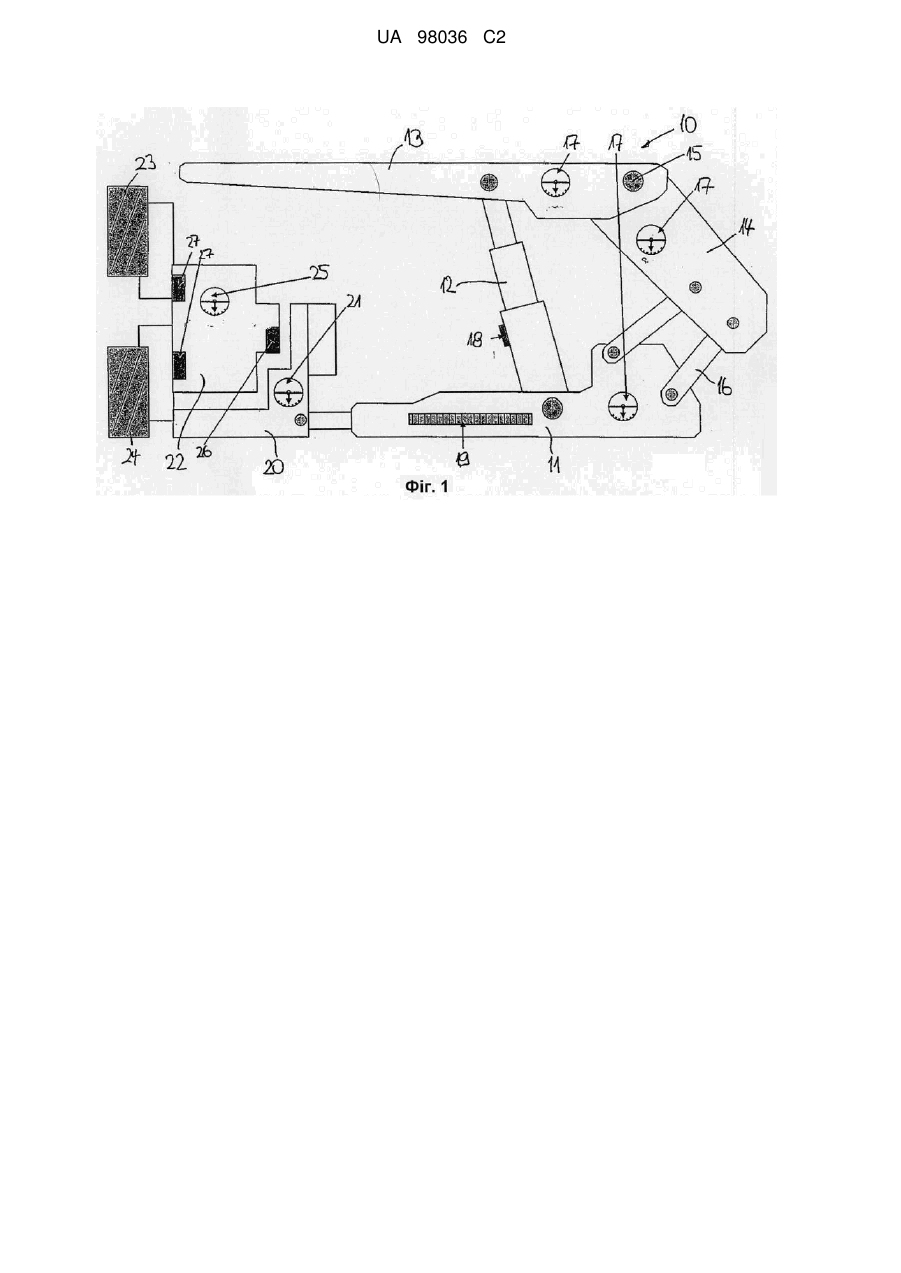
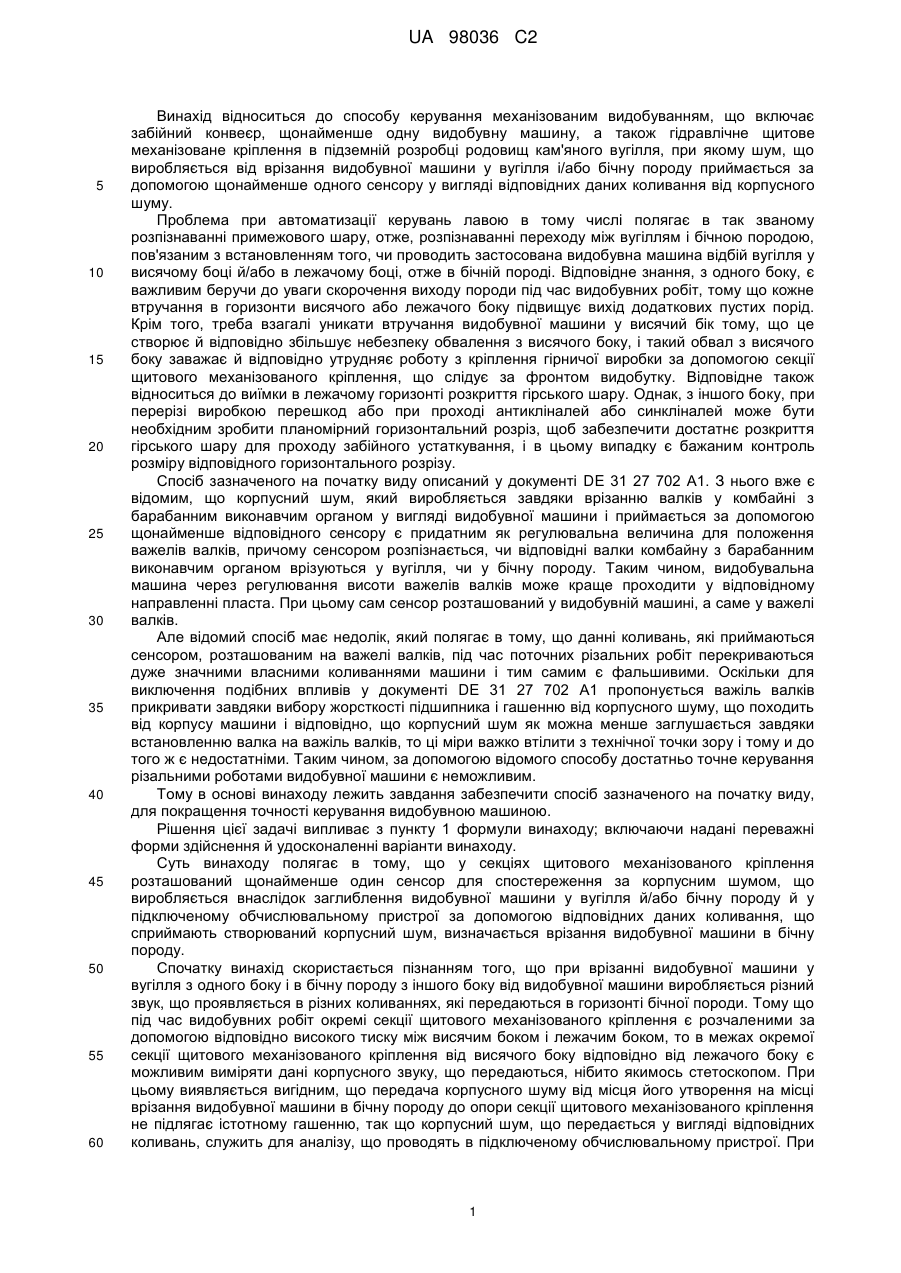
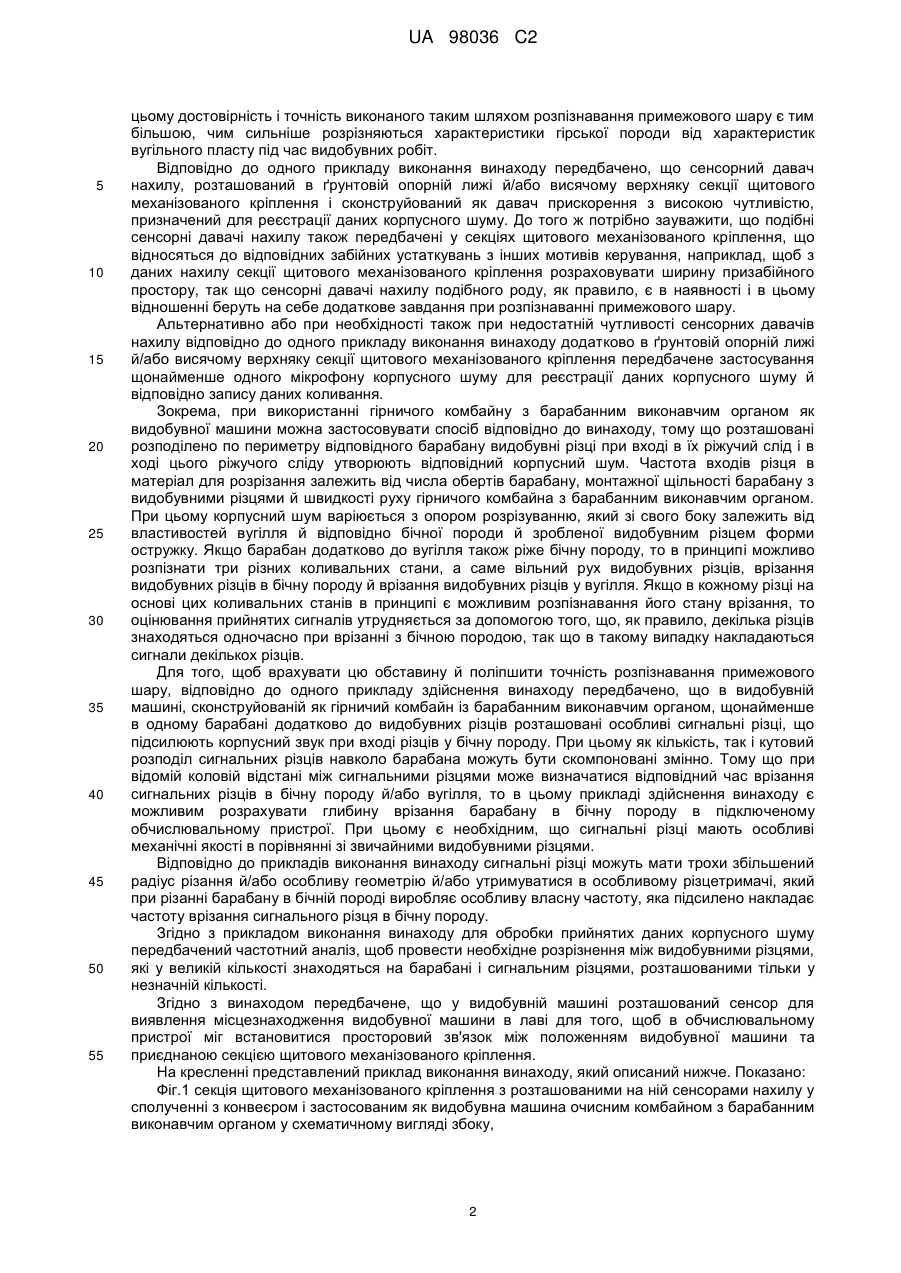
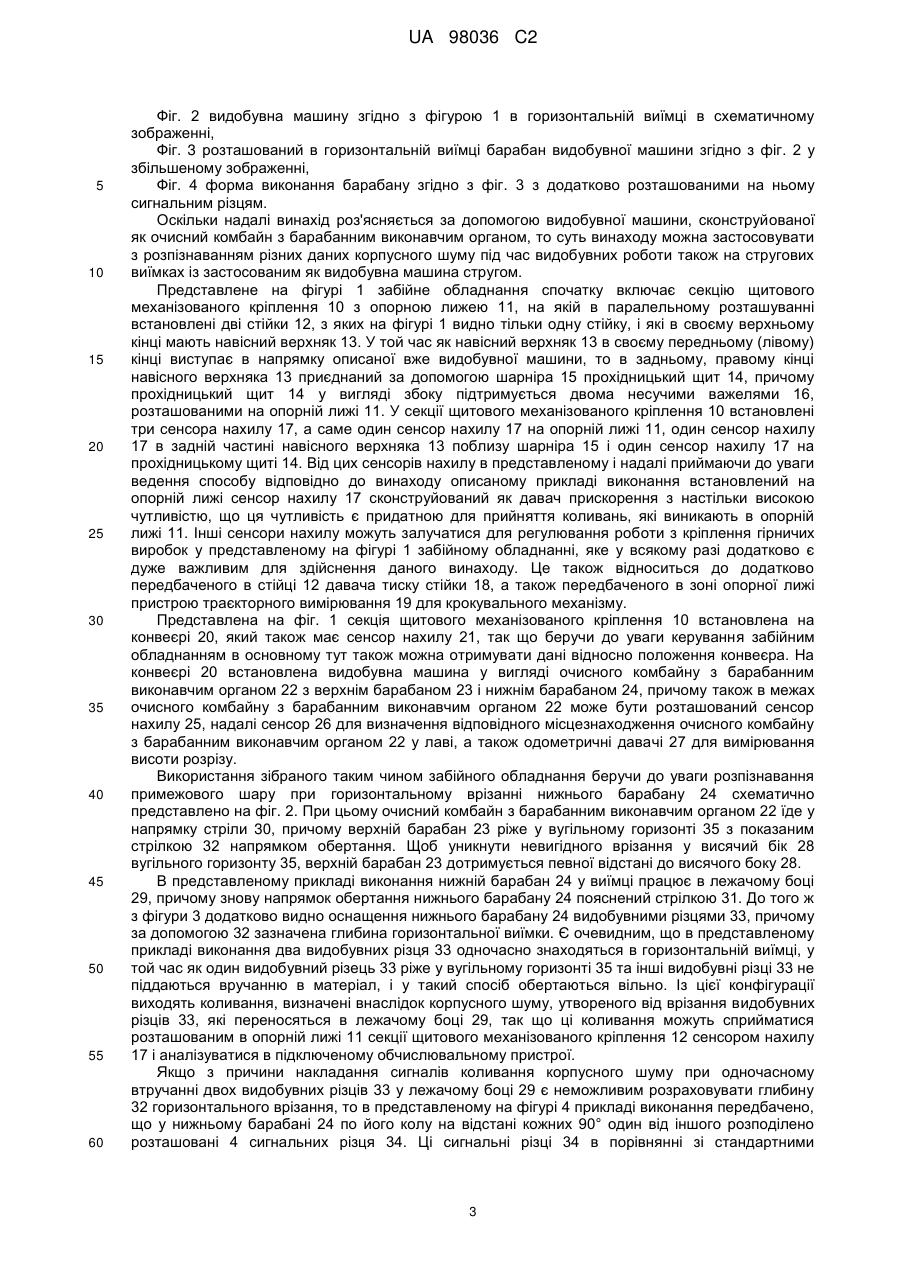
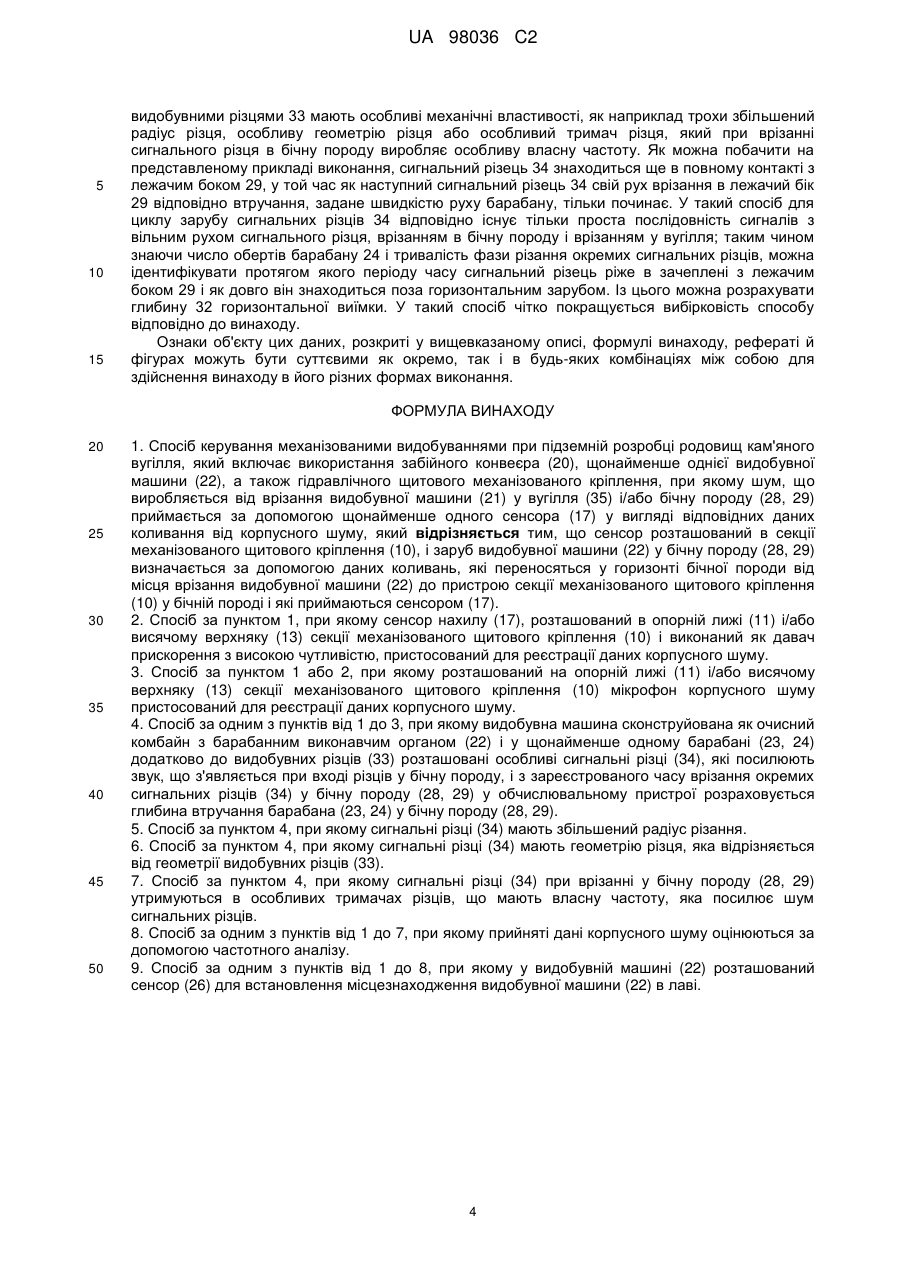
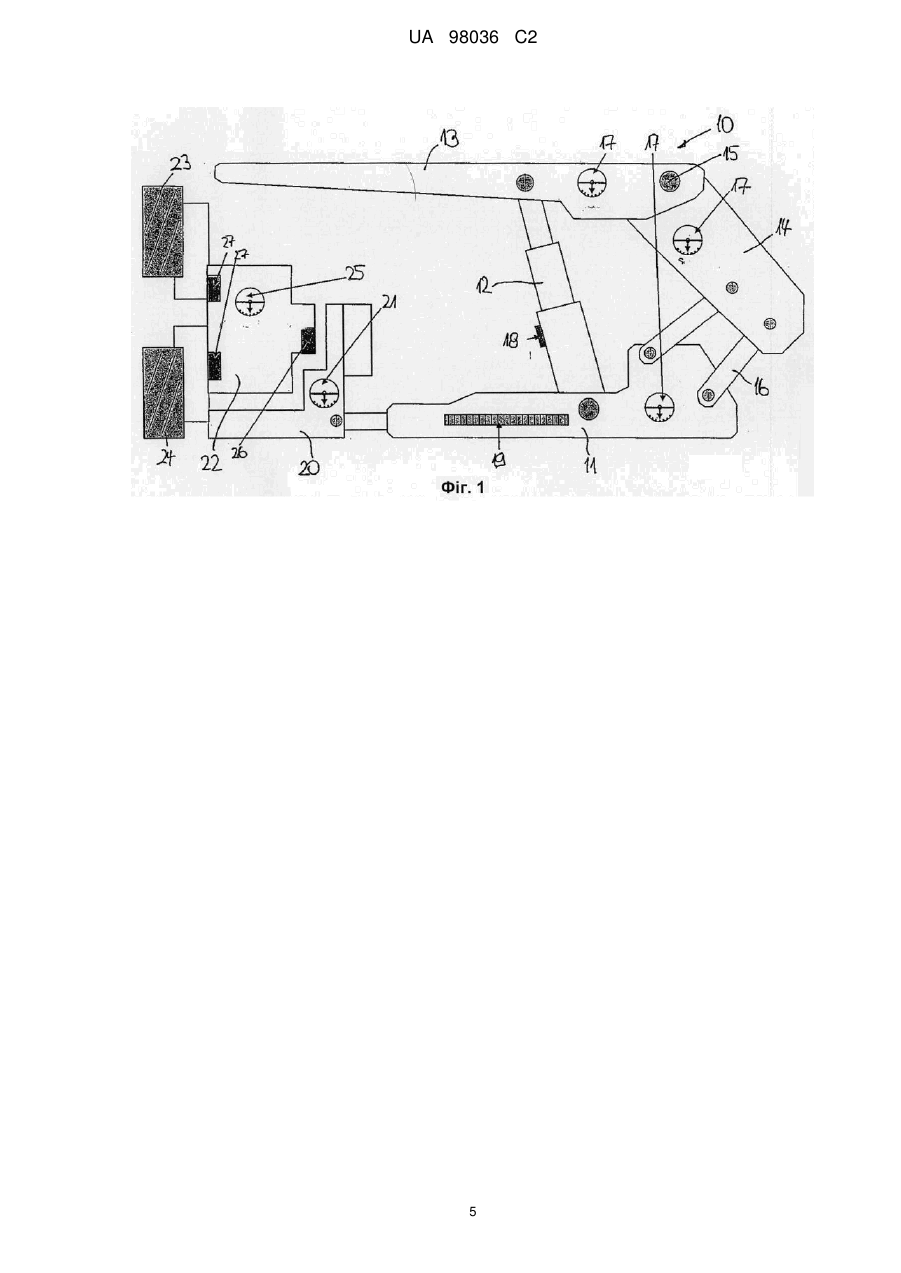
Реферат: Спосіб керування механізованими видобуваннями при підземній розробці родовищ кам'яного вугілля, який включає використання забійного конвеєра (20), щонайменше однієї видобувної машини (22), а також гідравлічного механізованого щитового кріплення, при якому в секціях механізованого щитового кріплення (10) розташований щонайменше один сенсор (17) для визначення даних корпусного шуму, що виробляється від врізання видобувної машини (21) у вугілля (35) і/або бічну породу (28, 29), і заруб видобувної машини (22) у бічну породу (28, 29) визначається в підключеному обчислювальному пристрої за допомогою записаних даних коливань, які відповідають утворюваному корпусному шуму. UA 98036 C2 (12) UA 98036 C2 UA 98036 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід відноситься до способу керування механізованим видобуванням, що включає забійний конвеєр, щонайменше одну видобувну машину, а також гідравлічне щитове механізоване кріплення в підземній розробці родовищ кам'яного вугілля, при якому шум, що виробляється від врізання видобувної машини у вугілля і/або бічну породу приймається за допомогою щонайменше одного сенсору у вигляді відповідних даних коливання від корпусного шуму. Проблема при автоматизації керувань лавою в тому числі полягає в так званому розпізнаванні примежового шару, отже, розпізнаванні переходу між вугіллям і бічною породою, пов'язаним з встановленням того, чи проводить застосована видобувна машина відбій вугілля у висячому боці й/або в лежачому боці, отже в бічній породі. Відповідне знання, з одного боку, є важливим беручи до уваги скорочення виходу породи під час видобувних робіт, тому що кожне втручання в горизонти висячого або лежачого боку підвищує вихід додаткових пустих порід. Крім того, треба взагалі уникати втручання видобувної машини у висячий бік тому, що це створює й відповідно збільшує небезпеку обвалення з висячого боку, і такий обвал з висячого боку заважає й відповідно утрудняє роботу з кріплення гірничої виробки за допомогою секції щитового механізованого кріплення, що слідує за фронтом видобутку. Відповідне також відноситься до виїмки в лежачому горизонті розкриття гірського шару. Однак, з іншого боку, при перерізі виробкою перешкод або при проході антикліналей або синкліналей може бути необхідним зробити планомірний горизонтальний розріз, щоб забезпечити достатнє розкриття гірського шару для проходу забійного устаткування, і в цьому випадку є бажаним контроль розміру відповідного горизонтального розрізу. Спосіб зазначеного на початку виду описаний у документі DE 31 27 702 А1. З нього вже є відомим, що корпусний шум, який виробляється завдяки врізанню валків у комбайні з барабанним виконавчим органом у вигляді видобувної машини і приймається за допомогою щонайменше відповідного сенсору є придатним як регулювальна величина для положення важелів валків, причому сенсором розпізнається, чи відповідні валки комбайну з барабанним виконавчим органом врізуються у вугілля, чи у бічну породу. Таким чином, видобувальна машина через регулювання висоти важелів валків може краще проходити у відповідному направленні пласта. При цьому сам сенсор розташований у видобувній машині, а саме у важелі валків. Але відомий спосіб має недолік, який полягає в тому, що данні коливань, які приймаються сенсором, розташованим на важелі валків, під час поточних різальних робіт перекриваються дуже значними власними коливаннями машини і тим самим є фальшивими. Оскільки для виключення подібних впливів у документі DE 31 27 702 А1 пропонується важіль валків прикривати завдяки вибору жорсткості підшипника і гашенню від корпусного шуму, що походить від корпусу машини і відповідно, що корпусний шум як можна менше заглушається завдяки встановленню валка на важіль валків, то ці міри важко втілити з технічної точки зору і тому и до того ж є недостатніми. Таким чином, за допомогою відомого способу достатньо точне керування різальними роботами видобувної машини є неможливим. Тому в основі винаходу лежить завдання забезпечити спосіб зазначеного на початку виду, для покращення точності керування видобувною машиною. Рішення цієї задачі випливає з пункту 1 формули винаходу; включаючи надані переважні форми здійснення й удосконаленні варіанти винаходу. Суть винаходу полягає в тому, що у секціях щитового механізованого кріплення розташований щонайменше один сенсор для спостереження за корпусним шумом, що виробляється внаслідок заглиблення видобувної машини у вугілля й/або бічну породу й у підключеному обчислювальному пристрої за допомогою відповідних даних коливання, що сприймають створюваний корпусний шум, визначається врізання видобувної машини в бічну породу. Спочатку винахід скористається пізнанням того, що при врізанні видобувної машини у вугілля з одного боку і в бічну породу з іншого боку від видобувної машини виробляється різний звук, що проявляється в різних коливаннях, які передаються в горизонті бічної породи. Тому що під час видобувних робіт окремі секції щитового механізованого кріплення є розчаленими за допомогою відповідно високого тиску між висячим боком і лежачим боком, то в межах окремої секції щитового механізованого кріплення від висячого боку відповідно від лежачого боку є можливим виміряти дані корпусного звуку, що передаються, нібито якимось стетоскопом. При цьому виявляється вигідним, що передача корпусного шуму від місця його утворення на місці врізання видобувної машини в бічну породу до опори секції щитового механізованого кріплення не підлягає істотному гашенню, так що корпусний шум, що передається у вигляді відповідних коливань, служить для аналізу, що проводять в підключеному обчислювальному пристрої. При 1 UA 98036 C2 5 10 15 20 25 30 35 40 45 50 55 цьому достовірність і точність виконаного таким шляхом розпізнавання примежового шару є тим більшою, чим сильніше розрізняються характеристики гірської породи від характеристик вугільного пласту під час видобувних робіт. Відповідно до одного прикладу виконання винаходу передбачено, що сенсорний давач нахилу, розташований в ґрунтовій опорній лижі й/або висячому верхняку секції щитового механізованого кріплення і сконструйований як давач прискорення з високою чутливістю, призначений для реєстрації даних корпусного шуму. До того ж потрібно зауважити, що подібні сенсорні давачі нахилу також передбачені у секціях щитового механізованого кріплення, що відносяться до відповідних забійних устаткувань з інших мотивів керування, наприклад, щоб з даних нахилу секції щитового механізованого кріплення розраховувати ширину призабійного простору, так що сенсорні давачі нахилу подібного роду, як правило, є в наявності і в цьому відношенні беруть на себе додаткове завдання при розпізнаванні примежового шару. Альтернативно або при необхідності також при недостатній чутливості сенсорних давачів нахилу відповідно до одного прикладу виконання винаходу додатково в ґрунтовій опорній лижі й/або висячому верхняку секції щитового механізованого кріплення передбачене застосування щонайменше одного мікрофону корпусного шуму для реєстрації даних корпусного шуму й відповідно запису даних коливання. Зокрема, при використанні гірничого комбайну з барабанним виконавчим органом як видобувної машини можна застосовувати спосіб відповідно до винаходу, тому що розташовані розподілено по периметру відповідного барабану видобувні різці при вході в їх ріжучий слід і в ході цього ріжучого сліду утворюють відповідний корпусний шум. Частота входів різця в матеріал для розрізання залежить від числа обертів барабану, монтажної щільності барабану з видобувними різцями й швидкості руху гірничого комбайна з барабанним виконавчим органом. При цьому корпусний шум варіюється з опором розрізуванню, який зі свого боку залежить від властивостей вугілля й відповідно бічної породи й зробленої видобувним різцем форми остружку. Якщо барабан додатково до вугілля також ріже бічну породу, то в принципі можливо розпізнати три різних коливальних стани, а саме вільний рух видобувних різців, врізання видобувних різців в бічну породу й врізання видобувних різців у вугілля. Якщо в кожному різці на основі цих коливальних станів в принципі є можливим розпізнавання його стану врізання, то оцінювання прийнятих сигналів утрудняється за допомогою того, що, як правило, декілька різців знаходяться одночасно при врізанні з бічною породою, так що в такому випадку накладаються сигнали декількох різців. Для того, щоб врахувати цю обставину й поліпшити точність розпізнавання примежового шару, відповідно до одного прикладу здійснення винаходу передбачено, що в видобувній машині, сконструйованій як гірничий комбайн із барабанним виконавчим органом, щонайменше в одному барабані додатково до видобувних різців розташовані особливі сигнальні різці, що підсилюють корпусний звук при вході різців у бічну породу. При цьому як кількість, так і кутовий розподіл сигнальних різців навколо барабана можуть бути скомпоновані змінно. Тому що при відомій коловій відстані між сигнальними різцями може визначатися відповідний час врізання сигнальних різців в бічну породу й/або вугілля, то в цьому прикладі здійснення винаходу є можливим розрахувати глибину врізання барабану в бічну породу в підключеному обчислювальному пристрої. При цьому є необхідним, що сигнальні різці мають особливі механічні якості в порівнянні зі звичайними видобувними різцями. Відповідно до прикладів виконання винаходу сигнальні різці можуть мати трохи збільшений радіус різання й/або особливу геометрію й/або утримуватися в особливому різцетримачі, який при різанні барабану в бічній породі виробляє особливу власну частоту, яка підсилено накладає частоту врізання сигнального різця в бічну породу. Згідно з прикладом виконання винаходу для обробки прийнятих даних корпусного шуму передбачений частотний аналіз, щоб провести необхідне розрізнення між видобувними різцями, які у великій кількості знаходяться на барабані і сигнальним різцями, розташованими тільки у незначній кількості. Згідно з винаходом передбачене, що у видобувній машині розташований сенсор для виявлення місцезнаходження видобувної машини в лаві для того, щоб в обчислювальному пристрої міг встановитися просторовий зв'язок між положенням видобувної машини та приєднаною секцією щитового механізованого кріплення. На кресленні представлений приклад виконання винаходу, який описаний нижче. Показано: Фіг.1 секція щитового механізованого кріплення з розташованими на ній сенсорами нахилу у сполученні з конвеєром і застосованим як видобувна машина очисним комбайном з барабанним виконавчим органом у схематичному вигляді збоку, 2 UA 98036 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 2 видобувна машину згідно з фігурою 1 в горизонтальній виїмці в схематичному зображенні, Фіг. 3 розташований в горизонтальній виїмці барабан видобувної машини згідно з фіг. 2 у збільшеному зображенні, Фіг. 4 форма виконання барабану згідно з фіг. 3 з додатково розташованими на ньому сигнальним різцям. Оскільки надалі винахід роз'ясняється за допомогою видобувної машини, сконструйованої як очисний комбайн з барабанним виконавчим органом, то суть винаходу можна застосовувати з розпізнаванням різних даних корпусного шуму під час видобувних роботи також на стругових виїмках із застосованим як видобувна машина стругом. Представлене на фігурі 1 забійне обладнання спочатку включає секцію щитового механізованого кріплення 10 з опорною лижею 11, на якій в паралельному розташуванні встановлені дві стійки 12, з яких на фігурі 1 видно тільки одну стійку, і які в своєму верхньому кінці мають навісний верхняк 13. У той час як навісний верхняк 13 в своєму передньому (лівому) кінці виступає в напрямку описаної вже видобувної машини, то в задньому, правому кінці навісного верхняка 13 приєднаний за допомогою шарніра 15 прохідницький щит 14, причому прохідницький щит 14 у вигляді збоку підтримується двома несучими важелями 16, розташованими на опорній лижі 11. У секції щитового механізованого кріплення 10 встановлені три сенсора нахилу 17, а саме один сенсор нахилу 17 на опорній лижі 11, один сенсор нахилу 17 в задній частині навісного верхняка 13 поблизу шарніра 15 і один сенсор нахилу 17 на прохідницькому щиті 14. Від цих сенсорів нахилу в представленому і надалі приймаючи до уваги ведення способу відповідно до винаходу описаному прикладі виконання встановлений на опорній лижі сенсор нахилу 17 сконструйований як давач прискорення з настільки високою чутливістю, що ця чутливість є придатною для прийняття коливань, які виникають в опорній лижі 11. Інші сенсори нахилу можуть залучатися для регулювання роботи з кріплення гірничих виробок у представленому на фігурі 1 забійному обладнанні, яке у всякому разі додатково є дуже важливим для здійснення даного винаходу. Це також відноситься до додатково передбаченого в стійці 12 давача тиску стійки 18, а також передбаченого в зоні опорної лижі пристрою траєкторного вимірювання 19 для крокувального механізму. Представлена на фіг. 1 секція щитового механізованого кріплення 10 встановлена на конвеєрі 20, який також має сенсор нахилу 21, так що беручи до уваги керування забійним обладнанням в основному тут також можна отримувати дані відносно положення конвеєра. На конвеєрі 20 встановлена видобувна машина у вигляді очисного комбайну з барабанним виконавчим органом 22 з верхнім барабаном 23 і нижнім барабаном 24, причому також в межах очисного комбайну з барабанним виконавчим органом 22 може бути розташований сенсор нахилу 25, надалі сенсор 26 для визначення відповідного місцезнаходження очисного комбайну з барабанним виконавчим органом 22 у лаві, а також одометричні давачі 27 для вимірювання висоти розрізу. Використання зібраного таким чином забійного обладнання беручи до уваги розпізнавання примежового шару при горизонтальному врізанні нижнього барабану 24 схематично представлено на фіг. 2. При цьому очисний комбайн з барабанним виконавчим органом 22 їде у напрямку стріли 30, причому верхній барабан 23 ріже у вугільному горизонті 35 з показаним стрілкою 32 напрямком обертання. Щоб уникнути невигідного врізання у висячий бік 28 вугільного горизонту 35, верхній барабан 23 дотримується певної відстані до висячого боку 28. В представленому прикладі виконання нижній барабан 24 у виїмці працює в лежачому боці 29, причому знову напрямок обертання нижнього барабану 24 пояснений стрілкою 31. До того ж з фігури 3 додатково видно оснащення нижнього барабану 24 видобувними різцями 33, причому за допомогою 32 зазначена глибина горизонтальної виїмки. Є очевидним, що в представленому прикладі виконання два видобувних різця 33 одночасно знаходяться в горизонтальній виїмці, у той час як один видобувний різець 33 ріже у вугільному горизонті 35 та інші видобувні різці 33 не піддаються вручанню в матеріал, і у такий спосіб обертаються вільно. Із цієї конфігурації виходять коливання, визначені внаслідок корпусного шуму, утвореного від врізання видобувних різців 33, які переносяться в лежачому боці 29, так що ці коливання можуть сприйматися розташованим в опорній лижі 11 секції щитового механізованого кріплення 12 сенсором нахилу 17 і аналізуватися в підключеному обчислювальному пристрої. Якщо з причини накладання сигналів коливання корпусного шуму при одночасному втручанні двох видобувних різців 33 у лежачому боці 29 є неможливим розраховувати глибину 32 горизонтального врізання, то в представленому на фігурі 4 прикладі виконання передбачено, що у нижньому барабані 24 по його колу на відстані кожних 90° один від іншого розподілено розташовані 4 сигнальних різця 34. Ці сигнальні різці 34 в порівнянні зі стандартними 3 UA 98036 C2 5 10 15 видобувними різцями 33 мають особливі механічні властивості, як наприклад трохи збільшений радіус різця, особливу геометрію різця або особливий тримач різця, який при врізанні сигнального різця в бічну породу виробляє особливу власну частоту. Як можна побачити на представленому прикладі виконання, сигнальний різець 34 знаходиться ще в повному контакті з лежачим боком 29, у той час як наступний сигнальний різець 34 свій рух врізання в лежачий бік 29 відповідно втручання, задане швидкістю руху барабану, тільки починає. У такий спосіб для циклу зарубу сигнальних різців 34 відповідно існує тільки проста послідовність сигналів з вільним рухом сигнального різця, врізанням в бічну породу і врізанням у вугілля; таким чином знаючи число обертів барабану 24 і тривалість фази різання окремих сигнальних різців, можна ідентифікувати протягом якого періоду часу сигнальний різець ріже в зачеплені з лежачим боком 29 і як довго він знаходиться поза горизонтальним зарубом. Із цього можна розрахувати глибину 32 горизонтальної виїмки. У такий спосіб чітко покращується вибірковість способу відповідно до винаходу. Ознаки об'єкту цих даних, розкриті у вищевказаному описі, формулі винаходу, рефераті й фігурах можуть бути суттєвими як окремо, так і в будь-яких комбінаціях між собою для здійснення винаходу в його різних формах виконання. ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 1. Спосіб керування механізованими видобуваннями при підземній розробці родовищ кам'яного вугілля, який включає використання забійного конвеєра (20), щонайменше однієї видобувної машини (22), а також гідравлічного щитового механізованого кріплення, при якому шум, що виробляється від врізання видобувної машини (21) у вугілля (35) і/або бічну породу (28, 29) приймається за допомогою щонайменше одного сенсора (17) у вигляді відповідних даних коливання від корпусного шуму, який відрізняється тим, що сенсор розташований в секції механізованого щитового кріплення (10), і заруб видобувної машини (22) у бічну породу (28, 29) визначається за допомогою даних коливань, які переносяться у горизонті бічної породи від місця врізання видобувної машини (22) до пристрою секції механізованого щитового кріплення (10) у бічній породі і які приймаються сенсором (17). 2. Спосіб за пунктом 1, при якому сенсор нахилу (17), розташований в опорній лижі (11) і/або висячому верхняку (13) секції механізованого щитового кріплення (10) і виконаний як давач прискорення з високою чутливістю, пристосованийдля реєстрації даних корпусного шуму. 3. Спосіб за пунктом 1 або 2, при якому розташований на опорній лижі (11) і/або висячому верхняку (13) секції механізованого щитового кріплення (10) мікрофон корпусного шуму пристосований для реєстрації даних корпусного шуму. 4. Спосіб за одним з пунктів від 1 до 3, при якому видобувна машина сконструйована як очисний комбайн з барабанним виконавчим органом (22) і у щонайменше одному барабані (23, 24) додатково до видобувних різців (33) розташовані особливі сигнальні різці (34), які посилюють звук, що з'являється при вході різців у бічну породу, і з зареєстрованого часу врізання окремих сигнальних різців (34) у бічну породу (28, 29) у обчислювальному пристрої розраховується глибина втручання барабана (23, 24) у бічну породу (28, 29). 5. Спосіб за пунктом 4, при якому сигнальні різці (34) мають збільшений радіус різання. 6. Спосіб за пунктом 4, при якому сигнальні різці (34) мають геометрію різця, яка відрізняється від геометрії видобувних різців (33). 7. Спосіб за пунктом 4, при якому сигнальні різці (34) при врізанні у бічну породу (28, 29) утримуються в особливих тримачах різців, що мають власну частоту, яка посилює шум сигнальних різців. 8. Спосіб за одним з пунктів від 1 до 7, при якому прийняті дані корпусного шуму оцінюються за допомогою частотного аналізу. 9. Спосіб за одним з пунктів від 1 до 8, при якому у видобувній машині (22) розташований сенсор (26) для встановлення місцезнаходження видобувної машини (22) в лаві. 4 UA 98036 C2 5 UA 98036 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for controlling of mechanized extraction by means of identification of boundary layer
Автори англійськоюJunker, Martin, Mozar, Armin
Назва патенту російськоюСпособ управления механизированной добычей с помощью распознавания приграничного слоя
Автори російськоюЮнкер Мартин, Моцар Армин
МПК / Мітки
МПК: E21C 41/16, E21C 35/24, E21C 25/56, E21D 23/12
Мітки: механізованими, розпізнавання, керування, спосіб, видобуваннями, допомогою, примежового, шару
Код посилання
<a href="https://ua.patents.su/8-98036-sposib-keruvannya-mekhanizovanimi-vidobuvannyami-za-dopomogoyu-rozpiznavannya-primezhovogo-sharu.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування механізованими видобуваннями за допомогою розпізнавання примежового шару</a>
Спосіб обробки інформації з використанням автоматичної штучної нейронної системи адаптованого резонансу з радіально-базисними функціями шару розпізнавання нейронної мережі
Номер патенту: 46267
Опубліковано: 10.12.2009
Автори: Калніболотський Юрій Максимович, Арутюнян Ашот Леонович
МПК: G06F 15/00
Мітки: системі, мережі, обробки, розпізнавання, автоматичної, шару, використанням, радіально-базисними, спосіб, функціями, інформації, резонансу, адаптованого, штучної, нейронної
Формула / Реферат:
Спосіб обробки інформації, який включає суб'єктивне вимірювання параметрів шляхом сортування готових виробів на групи на основі зібраного масиву даних про кожний виріб, який відрізняється тим, що додатково автоматизують інформацію з використанням автоматичної штучної нейронної системи адаптованого резонансу з радіально-базисними функціями шару розпізнавання мережі, яка включає блоки попередньої підготовки інформації, які виконують функцію...
Спосіб і склад догляду за шкірою, що попереджають її старіння, за допомогою активації протеази рогового шару

Номер патенту: 72533
Опубліковано: 15.03.2005
Автор: Шільтц Джон Р.
МПК: A61Q 19/08, A61K 8/40, A61K 8/44
Мітки: догляду, шару, склад, шкірою, старіння, протеази, спосіб, активації, рогового, допомогою, попереджають
Формула / Реферат:
Спосіб догляду за шкірою, що включає операції, при яких на старіючу або пошкоджену шкіру наносять косметичний склад, що містить: І) катіонну поверхнево-активну речовину та аніонну поверхнево-активну речовину;ІІ) щонайменше один хелатний компонент; іІІІ) не містить активнодіючого компонента щодо шкіри; який має значення рН від 5 до 8 і за допомогою якого здійснюють постійне ефективне стимулювання ступеня...
Пристрій для розпізнавання та обліку предметів, які рухаються за допомогою конвеєру
Номер патенту: 25625
Опубліковано: 10.08.2007
Автори: Гавриленко Олег Іванович, Сиротська Ольга Олександрівна, Мирна Олена Володимирівна, Тарасенко Олексій Володимирович
МПК: G06K 9/18
Мітки: допомогою, обліку, розпізнавання, пристрій, предметів, рухаються, конвеєру
Формула / Реферат:
Пристрій для розпізнавання та обліку предметів, які рухаються за допомогою конвеєра, що містить перетворювач сигналу, який відрізняється тим, що введені цифрова WEB-камера, комп'ютер, який містить програму обробки інформації з цифрової WEB-камери, фотодатчик, який фіксує появу нового предмета, що рухається на конвеєрі.
Спосіб керування параметрами прикордонного шару на секційованій електродній стінці мгд-генератору
Номер патенту: 3882
Опубліковано: 27.12.1994
Автори: Козакевич Олег Янович, Яковлев Вячеслав Сергійович, Котов Віктор Григорович, Штефан Валентин Володимирович, Веселов Валентин Васильович, Ганефельд Роланд Вільгельмович, Качурін Олександр Харитонович
МПК: H02K 44/00
Мітки: стінці, прикордонного, керування, спосіб, шару, параметрами, мгд-генератору, електродний, секційованій
Формула / Реферат:
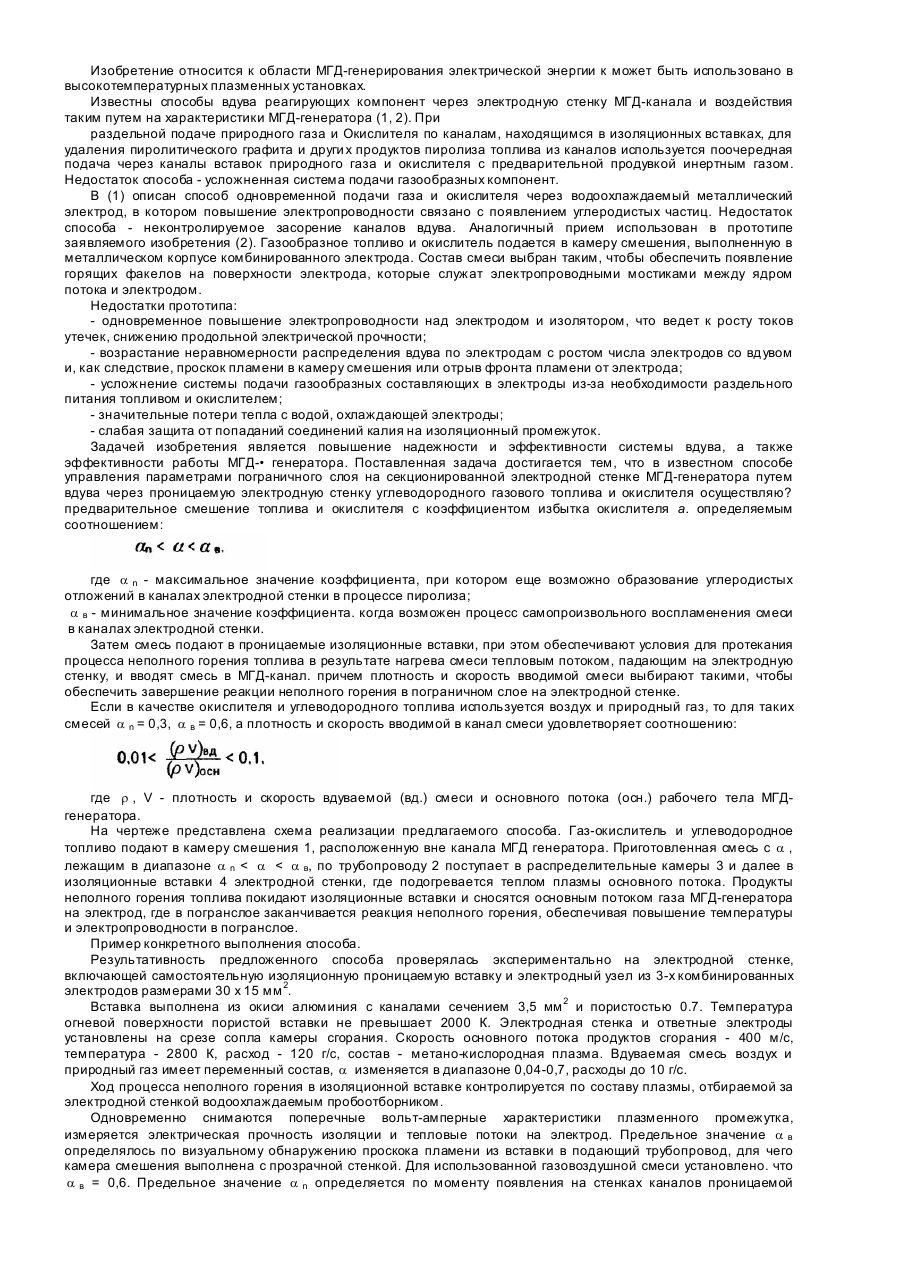
1. Способ управления параметрами пограничного слоя на секционированной электродной стенке МГД-генератора путем вдува через проницаемую электродную стенку углеводородного газового топлива и окислителя, отличающийся тем, что топливо и окислитель смешивают с коэффициентом избытка окислителя , определяемого соотношением: n < < в, где n -максимальное значение коэффициента, соответствующее режиму образования углеродистых...
Автоматизований спосіб керування лікуванням (варіанти) та система керування лікуванням захворювань (варіанти) шляхом здійснення способів оптимізації лікування і медичної діагностики за допомогою вибору варіанті
Номер патенту: 64743
Опубліковано: 15.03.2004
Автор: Айліфф Едвін С.
МПК: G06Q 50/00
Мітки: система, шляхом, лікування, здійснення, автоматизований, керування, варіанти, способів, оптимізації, лікуванням, медичної, діагностики, спосіб, допомогою, захворювань, вибору
Формула / Реферат:
1. Автоматизований спосіб керування лікуванням, що містить оцінювання здоров'я пацієнта, що має захворювання, і оптимізацію лікування захворювання на підставі оцінювання здоров'я пацієнта, причому спосіб додатково містить крок призначення часу повторного відвідування для пацієнта.2. Спосіб за п. 1, у якому час повторного відвідування є часом за регулярним розкладом.3. Спосіб за п. 1, у якому час повторного відвідування...
Попередній патент: Спосіб відновлення зображень, що містять вимірювальну інформацію про геометричні параметри об’єктів вимірювань
Наступний патент: Пристрій для транспортування гірничої маси у кар’єрі
Випадковий патент: Спосіб корекції сурфактантних властивостей крові у хворих на хронічне обструктивне захворювання легень