Хірургічний пристрій для накладання швів з функціями зшивання

Формула / Реферат
1. Хірургічний пристрій для накладання швів з функціями зшивання, який містить опору, хірургічну голку та рухому частину голки, причому опора, хірургічна голка та рухома частина голки утворюють шовну частину, при цьому хірургічна голка рухається у напрямку до опори за допомогою рухомої частини голки, і перші шовні нитки з хірургічної голки та другі шовні нитки з опори чергуються одна з одною під час операції.
2. Хірургічний пристрій за п. 1, який відрізняється тим, що додатково містить рухому частину, яка включає щонайменше одну частину для сполучення для забезпечення спільного з шовною частиною руху.
3. Хірургічний пристрій за п. 1, який відрізняється тим, що шовна частина виконує принаймні один з наступних видів швів: тришаровий шов, трирядковий шов, чотирирядковий шов, шов "зигзаг" і паралельний шов, шов двома голками, еластичний шов, підігнутий шов, вишивання, нашивка, сліпий шов, обметування шва та перев'язка шва.
4. Хірургічний пристрій за п. 1, який відрізняється тим, що рухома частина голки сформована з можливістю руху вздовж направляючої рейки.
5. Хірургічний пристрій за п. 1, який відрізняється тим, що опора і рухома частина голки мають частину, що повертається.
Текст
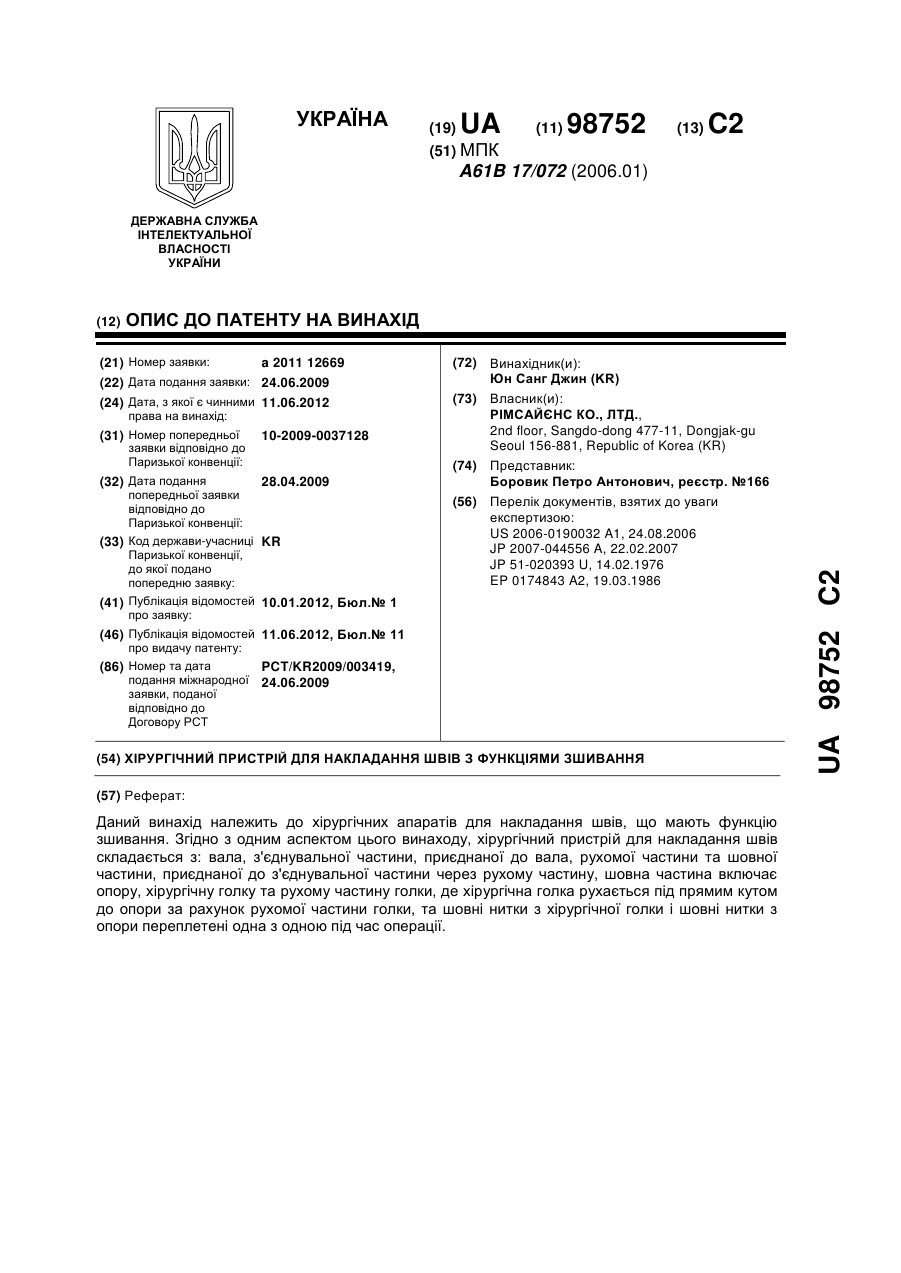
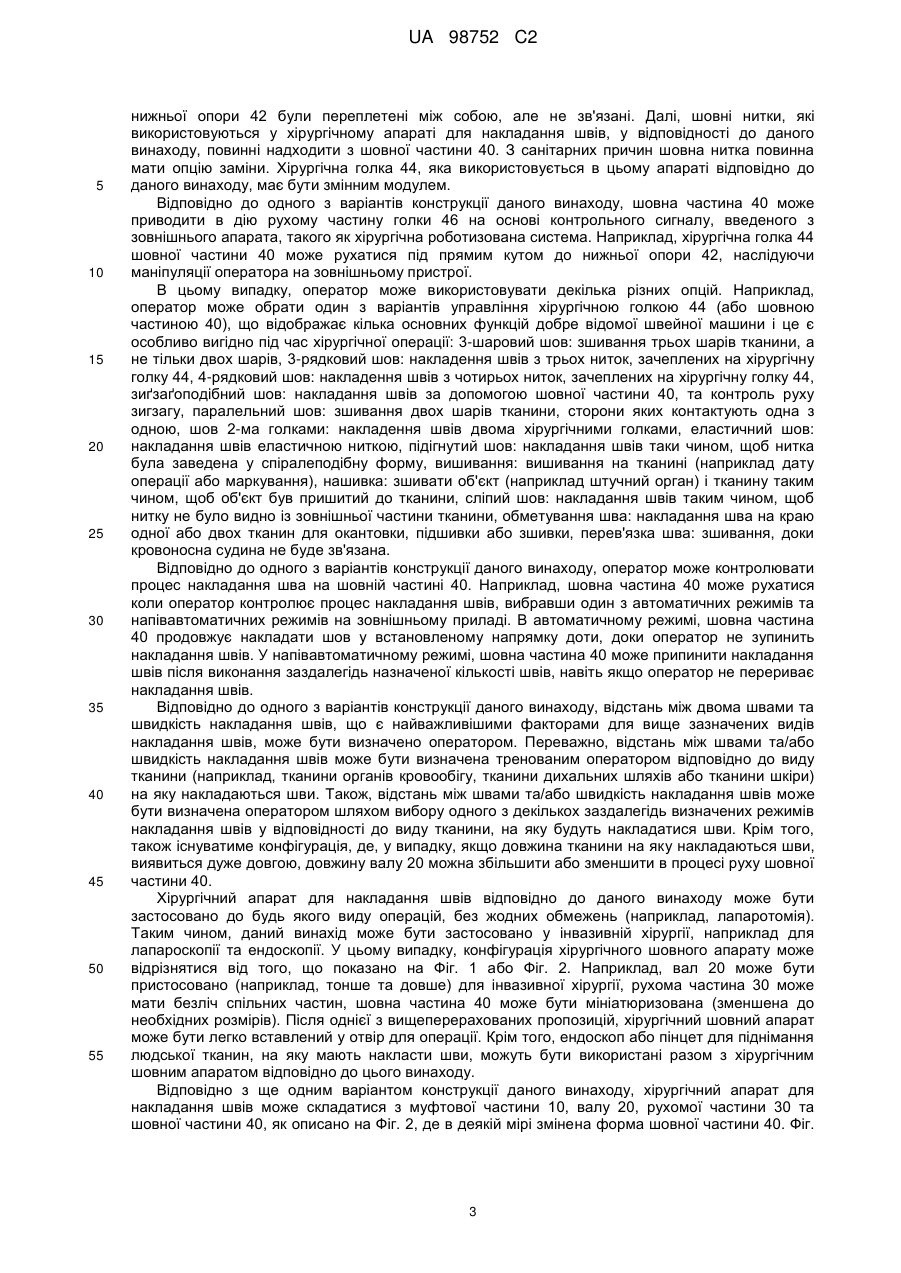
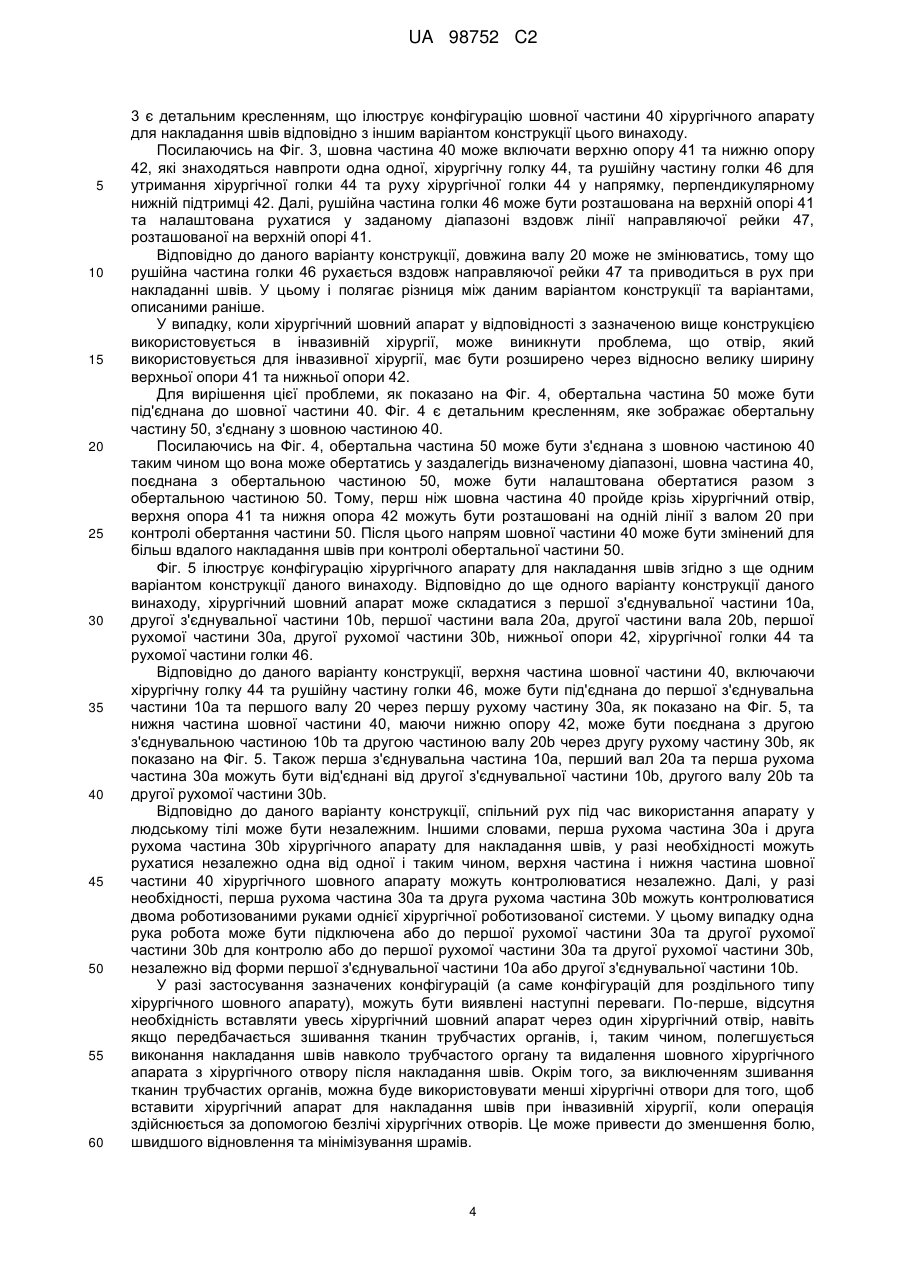
Реферат: Даний винахід належить до хірургічних апаратів для накладання швів, що мають функцію зшивання. Згідно з одним аспектом цього винаходу, хірургічний пристрій для накладання швів складається з: вала, з'єднувальної частини, приєднаної до вала, рухомої частини та шовної частини, приєднаної до з'єднувальної частини через рухому частину, шовна частина включає опору, хірургічну голку та рухому частину голки, де хірургічна голка рухається під прямим кутом до опори за рахунок рухомої частини голки, та шовні нитки з хірургічної голки і шовні нитки з опори переплетені одна з одною під час операції. UA 98752 C2 (12) UA 98752 C2 UA 98752 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід відноситься до хірургічних приладів для накладання швів з функціями зшивання. Зокрема, даний винахід відноситься до хірургічних приладів для накладання швів, з якими оператор (хірург), може накладати шви на тканинах людського тіла точно, швидко і легко. Підчас хірургічної операції, важливо зшивати різні шари тканини людського тіла, такі як серозна оболонка, м'язи, фасції і шкіру. Основним завдання в процесі накладання швів є, за рахунок скорочення часу накладання швів, звести до мінімуму стомлюваність оператора і час анестезії, щоб сприяє відновленню рани та мінімізує втрати крові. Крім того, з естетичної точки зору, мінімізація розмірів шрамів, що з'являються внаслідок хірургічної операції, є важливим для пацієнта. Традиційний процес накладання швів виконується таким чином, що оператор вручну зшиває тканини людського тіла використовуючи хірургічну голку та шовні нитки. Однак, згідно з традиційним способом накладання швів (з використанням ручної праці оператора), час на операцію часто подовжується в залежності від навичок та досвіду оператора щодо накладення швів. Це може призвести до більшої втоми оператора, більшого часу анестезії чи складнішого управління втратами крові. Крім того, ступінь шрамів, що з'являються, залежить від рівномірності та щільності швів, при цьому традиційним ручним способом накладання швів не можливо гарантувати однорідність та щільність швів. Метою даного винаходу є вирішення проблеми описаної вище. Метою даного винаходу є забезпечення оператора хірургічним апаратом для накладання швів, який робить цей процес високоякісно і легко. Ще однією метою хірургічного апарату для накладання швів є мінімізація витрат часу для накладання швів. Додатковою метою даного винаходу є мінімізація розмірів шрамів, що виникають після накладання швів. Ще однією метою даного винаходу є під'єднання хірургічного апарату для накладання швів до зовнішнього апарату, такого як хірургічна роботизована система з автоматичною рукою, для надання можливості оператору автоматично накладати шви. Відповідно до даного винаходу: - оператор може накласти шов охайно і легко, - зменшується час витрачений на накладання швів, - розмір шрамів, які виникають в наслідок накладання швів, може бути зменшено до мінімуму, - даний хірургічний апарат для накладання швів може бути під'єднаний до зовнішньої приладу, такого як роботизована хірургічна система, для надання можливості оператору автоматично накладати шви. Зазначені цілі та особливості цього винаходу стануть очевидними з подальшого опису варіантів конструкції разом з доданими кресленнями, у яких: Фіг. 1 ілюструє загальну конфігурацію хірургічного апарату для накладання швів у відповідності з одним варіантом конструкції цього винаходу, Фіг. 2 детально ілюструє конфігурацію шовної частини 40 хірургічного апарату для накладання швів відповідно з одним варіантом конструкції цього винаходу, Фіг. 3 детально ілюструє конфігурацію шовної частини 40 хірургічного апарату для накладання швів відповідно до іншого варіанту конструкції цього винаходу, Фіг. 4 детально ілюструє обертальну частину 50, з'єднану з шовною частиною 40, Фіг. 5 ілюструє конфігурацію хірургічного апарату для накладання швів відповідно з ще одним варіантом конструкції цього винаходу. Для досягнення вищевказаних цілей існує кілька конфігурацій даного апарату, які описано нижче. Згідно з одним аспектом цього винаходу, хірургічний апарат для накладання швів складається зі: з'єднувальної частини, вала, під'єднаного до з'єднувальної частини, операційної частини, та шовної частини, з'єднаної з валом за допомогою операційної частини; шовна частина включає опору, хірургічну голку і ту частину, що рухає голку, де хірургічна голка, що приводиться в дію за допомогою частини, що рухає голку, рухається в напрямку, по суті перпендикулярному до опори, шовні нитки від хірургічної голки і шовні нитки з опори, сполучені між собою під час операції. У відповідності до іншого аспекту даного винаходу, хірургічний апарат для накладання швів складається з: першої з'єднувальної частини та другої з'єднувальної частини, перший вал з'єднаний з першою з'єднувальною частиною і другий вал з'єднаний з другою з'єднувальною частиною, перша та друга операційні частини, також перша шовна частина поєднана з першим 1 UA 98752 C2 5 10 15 20 25 30 35 40 45 50 55 60 валом шляхом з'єднання першої операційної частини і другої шовної частини з другим валом через другу операційну частину, де перша шовна частина складається з хірургічної голки і частини, що рухає голку, друга шовна частина включає опору, де хірургічна голка рухається під прямим кутом щодо опори за допомогою рухомої частини голки, шовні нитки від хірургічної голки і шовні нитки від опори, сполучені між собою під час операції. У даному детальному описі здійснюються посилання до доданих малюнків та креслень, що демонструють конкретні умови; за яких даний винахід може бути використано. Ці умови описані досить детально, для того щоб дати можливість фахівцям у цій галузі використовувати даний винахід на практиці. Слід розуміти, що різні варіанти виконання цього винаходу не є такими, що обов'язково взаємовиключаються. Наприклад, певна особливість, структура або характеристика, описана тут у зв'язку з одним з варіантів конструкції, може бути реалізована в інших варіантах, не відходячи від суті та призначення цього винаходу. Крім того, слід розуміти, що місце розташування або порядок розташування окремих елементів у кожному варіанті конструкції може бути змінено без відходу від суті і призначення винаходу. Нижче наведений детальний опис, який не повинен сприйматися у обмеженому сенсі, об'єм претензій відповідно до цього винаходу визначається лише формулою винаходу, відповідним чином інтерпретованою, наряду з повним спектром варіантів, які формула даного винаходу охоплює. На кресленнях цифрові позначення відносяться до тієї ж частини приладу або частини приладу зі схожою функцією для усіх креслень. Даний винахід буде описано більш докладно з посиланням на креслення. Фіг. 1 ілюструє загальну конфігурацію хірургічного апарату для накладання швів, що відповідає одному з варіантів конструкції даного винаходу. Як показано на Фіг. 1, хірургічний шовний апарат відповідно до одного з варіантів конструкції може складатися зі з'єднувальної частини 10, валу 20, рухомої частини 30 і шовної частини 40. Відповідно до одного з варіантів конструкції даного винаходу, з'єднувальна частина 10 поєднує хірургічний шовний апарат з зовнішнім приладом, таким як хірургічний робот з роботизованою рукою. Для під'єднання хірургічного апарату до хірургічного робота або роботизованої руки, ми посилаємося на виложену заявку на патент Республіки Корея No. 2005-100147 (Дата публікації: 18 жовтня 2005) та виложену заявку на патент Республіки Корея No. 2008-89579 (Дата публікації: 07 жовтня 2008). При цьому, зміст двох попередніх публікацій слід розглядати як такі, що були включені до даної специфікації у повному обсязі. Згідно з одним варіантом конструкції цього винаходу, вал 20 може включати в себе вал, один кінець якого з'єднаний зі з'єднувальною частиною 10, а інший кінець під'єднаний до рухомої частини 30. У внутрішній частині вала 20 можуть бути розташовані контрольні деталі, такі як дріт для контролю рухомої частини 30 та/або шовна частина 40. Далі, вал може фізично підтримувати хірургічний шовний апарат згідно з даним винаходом. Відповідно до одного з варіантів конструкції даного винаходу, рухома частина 30 може поєднувати шовну частину 40 з валом 20, і змінювати місце розташування та кут шовної частини 40 відповідно до валу 20, у відповідь на заздалегідь визначений контрольний сигнал від зовнішнього апарату. Рухома частина 30 може поєднувати більше ніж дві суміжні частини задля виконання руху під кутом та/або, у разі необхідності, по колу. Задля налаштування рухомої частини 30 надалі може бути використано будь-який відомий спосіб для побудови спільних частин хірургічного апарату. Шовну частину 40 відповідно до декількох варіантів конструкції даного винаходу буде описано детальніше у наступних параграфах. Фіг. 1 є детальним описом конфігурації шовної частини 40 хірургічного апарату для накладання швів відповідно до одного з варіантів конструкції даного винаходу. Відповідно до Фіг. 2, шовна частина 40 є елементом для накладання швів на людських тканинах, що може мати нижню опору 42, хірургічну голку 44 і частину для руху голки 46 для утримання хірургічної голки 44 та руху хірургічної голки 44 у напрямку під прямим кутом до нижньої опори 42. Тут і далі, наприклад, зображено що опора для шовної частини 40 відповідно до даного винаходу розташована нижче, але важливо зазначити що, у разі необхідності, опора, яка протилежна хірургічній голці 44, може бути розташована вище від рівня хірургічної голки 44. Відповідно до одного з варіантів конструкції даного винаходу, шовна частина 40 може накладати шви на людські тканини, використовуючи схожий або такий самий спосіб, що й відома швейна машина, використання якої для одягу було відомо давно. Інакше кажучи, людські тканини можуть бути зшиті шляхом переплутування або переплетення шовних нитей від хірургічної голки 44 з шовними нитями від нижньої опори 42 у відповідності до рухів хірургічної голки 44 вгору-вниз. У цьому випадку, важливо, щоб шовні нитки з хірургічної голки 44 та 2 UA 98752 C2 5 10 15 20 25 30 35 40 45 50 55 нижньої опори 42 були переплетені між собою, але не зв'язані. Далі, шовні нитки, які використовуються у хірургічному апараті для накладання швів, у відповідності до даного винаходу, повинні надходити з шовної частини 40. З санітарних причин шовна нитка повинна мати опцію заміни. Хірургічна голка 44, яка використовується в цьому апараті відповідно до даного винаходу, має бути змінним модулем. Відповідно до одного з варіантів конструкції даного винаходу, шовна частина 40 може приводити в дію рухому частину голки 46 на основі контрольного сигналу, введеного з зовнішнього апарата, такого як хірургічна роботизована система. Наприклад, хірургічна голка 44 шовної частини 40 може рухатися під прямим кутом до нижньої опори 42, наслідуючи маніпуляції оператора на зовнішньому пристрої. В цьому випадку, оператор може використовувати декілька різних опцій. Наприклад, оператор може обрати один з варіантів управління хірургічною голкою 44 (або шовною частиною 40), що відображає кілька основних функцій добре відомої швейної машини і це є особливо вигідно під час хірургічної операції: 3-шаровий шов: зшивання трьох шарів тканини, а не тільки двох шарів, 3-рядковий шов: накладення швів з трьох ниток, зачеплених на хірургічну голку 44, 4-рядковий шов: накладення швів з чотирьох ниток, зачеплених на хірургічну голку 44, зиґзаґоподібний шов: накладання швів за допомогою шовної частини 40, та контроль руху зигзагу, паралельний шов: зшивання двох шарів тканини, сторони яких контактують одна з одною, шов 2-ма голками: накладення швів двома хірургічними голками, еластичний шов: накладання швів еластичною ниткою, підігнутий шов: накладання швів таки чином, щоб нитка була заведена у спіралеподібну форму, вишивання: вишивання на тканині (наприклад дату операції або маркування), нашивка: зшивати об'єкт (наприклад штучний орган) і тканину таким чином, щоб об'єкт був пришитий до тканини, сліпий шов: накладання швів таким чином, щоб нитку не було видно із зовнішньої частини тканини, обметування шва: накладання шва на краю одної або двох тканин для окантовки, підшивки або зшивки, перев'язка шва: зшивання, доки кровоносна судина не буде зв'язана. Відповідно до одного з варіантів конструкції даного винаходу, оператор може контролювати процес накладання шва на шовній частині 40. Наприклад, шовна частина 40 може рухатися коли оператор контролює процес накладання швів, вибравши один з автоматичних режимів та напівавтоматичних режимів на зовнішньому приладі. В автоматичному режимі, шовна частина 40 продовжує накладати шов у встановленому напрямку доти, доки оператор не зупинить накладання швів. У напівавтоматичному режимі, шовна частина 40 може припинити накладання швів після виконання заздалегідь назначеної кількості швів, навіть якщо оператор не перериває накладання швів. Відповідно до одного з варіантів конструкції даного винаходу, відстань між двома швами та швидкість накладання швів, що є найважливішими факторами для вище зазначених видів накладання швів, може бути визначено оператором. Переважно, відстань між швами та/або швидкість накладання швів може бути визначена тренованим оператором відповідно до виду тканини (наприклад, тканини органів кровообігу, тканини дихальних шляхів або тканини шкіри) на яку накладаються шви. Також, відстань між швами та/або швидкість накладання швів може бути визначена оператором шляхом вибору одного з декількох заздалегідь визначених режимів накладання швів у відповідності до виду тканини, на яку будуть накладатися шви. Крім того, також існуватиме конфігурація, де, у випадку, якщо довжина тканини на яку накладаються шви, виявиться дуже довгою, довжину валу 20 можна збільшити або зменшити в процесі руху шовної частини 40. Хірургічний апарат для накладання швів відповідно до даного винаходу може бути застосовано до будь якого виду операцій, без жодних обмежень (наприклад, лапаротомія). Таким чином, даний винахід може бути застосовано у інвазивній хірургії, наприклад для лапароскопії та ендоскопії. У цьому випадку, конфігурація хірургічного шовного апарату може відрізнятися від того, що показано на Фіг. 1 або Фіг. 2. Наприклад, вал 20 може бути пристосовано (наприклад, тонше та довше) для інвазивної хірургії, рухома частина 30 може мати безліч спільних частин, шовна частина 40 може бути мініатюризована (зменшена до необхідних розмірів). Після однієї з вищеперерахованих пропозицій, хірургічний шовний апарат може бути легко вставлений у отвір для операції. Крім того, ендоскоп або пінцет для піднімання людської тканин, на яку мають накласти шви, можуть бути використані разом з хірургічним шовним апаратом відповідно до цього винаходу. Відповідно з ще одним варіантом конструкції даного винаходу, хірургічний апарат для накладання швів може складатися з муфтової частини 10, валу 20, рухомої частини 30 та шовної частини 40, як описано на Фіг. 2, де в деякій мірі змінена форма шовної частини 40. Фіг. 3 UA 98752 C2 5 10 15 20 25 30 35 40 45 50 55 60 3 є детальним кресленням, що ілюструє конфігурацію шовної частини 40 хірургічного апарату для накладання швів відповідно з іншим варіантом конструкції цього винаходу. Посилаючись на Фіг. 3, шовна частина 40 може включати верхню опору 41 та нижню опору 42, які знаходяться навпроти одна одної, хірургічну голку 44, та рушійну частину голки 46 для утримання хірургічної голки 44 та руху хірургічної голки 44 у напрямку, перпендикулярному нижній підтримці 42. Далі, рушійна частина голки 46 може бути розташована на верхній опорі 41 та налаштована рухатися у заданому діапазоні вздовж лінії направляючої рейки 47, розташованої на верхній опорі 41. Відповідно до даного варіанту конструкції, довжина валу 20 може не змінюватись, тому що рушійна частина голки 46 рухається вздовж направляючої рейки 47 та приводиться в рух при накладанні швів. У цьому і полягає різниця між даним варіантом конструкції та варіантами, описаними раніше. У випадку, коли хірургічний шовний апарат у відповідності з зазначеною вище конструкцією використовується в інвазивній хірургії, може виникнути проблема, що отвір, який використовується для інвазивної хірургії, має бути розширено через відносно велику ширину верхньої опори 41 та нижньої опори 42. Для вирішення цієї проблеми, як показано на Фіг. 4, обертальна частина 50 може бути під'єднана до шовної частини 40. Фіг. 4 є детальним кресленням, яке зображає обертальну частину 50, з'єднану з шовною частиною 40. Посилаючись на Фіг. 4, обертальна частина 50 може бути з'єднана з шовною частиною 40 таким чином що вона може обертатись у заздалегідь визначеному діапазоні, шовна частина 40, поєднана з обертальною частиною 50, може бути налаштована обертатися разом з обертальною частиною 50. Тому, перш ніж шовна частина 40 пройде крізь хірургічний отвір, верхня опора 41 та нижня опора 42 можуть бути розташовані на одній лінії з валом 20 при контролі обертання частини 50. Після цього напрям шовної частини 40 може бути змінений для більш вдалого накладання швів при контролі обертальної частини 50. Фіг. 5 ілюструє конфігурацію хірургічного апарату для накладання швів згідно з ще одним варіантом конструкції даного винаходу. Відповідно до ще одного варіанту конструкції даного винаходу, хірургічний шовний апарат може складатися з першої з'єднувальної частини 10а, другої з'єднувальної частини 10b, першої частини вала 20а, другої частини вала 20b, першої рухомої частини 30а, другої рухомої частини 30b, нижньої опори 42, хірургічної голки 44 та рухомої частини голки 46. Відповідно до даного варіанту конструкції, верхня частина шовної частини 40, включаючи хірургічну голку 44 та рушійну частину голки 46, може бути під'єднана до першої з'єднувальна частини 10а та першого валу 20 через першу рухому частину 30а, як показано на Фіг. 5, та нижня частина шовної частини 40, маючи нижню опору 42, може бути поєднана з другою з'єднувальною частиною 10b та другою частиною валу 20b через другу рухому частину 30b, як показано на Фіг. 5. Також перша з'єднувальна частина 10а, перший вал 20а та перша рухома частина 30а можуть бути від'єднані від другої з'єднувальної частини 10b, другого валу 20b та другої рухомої частини 30b. Відповідно до даного варіанту конструкції, спільний рух під час використання апарату у людському тілі може бути незалежним. Іншими словами, перша рухома частина 30а і друга рухома частина 30b хірургічного апарату для накладання швів, у разі необхідності можуть рухатися незалежно одна від одної і таким чином, верхня частина і нижня частина шовної частини 40 хірургічного шовного апарату можуть контролюватися незалежно. Далі, у разі необхідності, перша рухома частина 30а та друга рухома частина 30b можуть контролюватися двома роботизованими руками однієї хірургічної роботизованої системи. У цьому випадку одна рука робота може бути підключена або до першої рухомої частини 30а та другої рухомої частини 30b для контролю або до першої рухомої частини 30а та другої рухомої частини 30b, незалежно від форми першої з'єднувальної частини 10а або другої з'єднувальної частини 10b. У разі застосування зазначених конфігурацій (а саме конфігурацій для роздільного типу хірургічного шовного апарату), можуть бути виявлені наступні переваги. По-перше, відсутня необхідність вставляти увесь хірургічний шовний апарат через один хірургічний отвір, навіть якщо передбачається зшивання тканин трубчастих органів, і, таким чином, полегшується виконання накладання швів навколо трубчастого органу та видалення шовного хірургічного апарата з хірургічного отвору після накладання швів. Окрім того, за виключенням зшивання тканин трубчастих органів, можна буде використовувати менші хірургічні отвори для того, щоб вставити хірургічний апарат для накладання швів при інвазивній хірургії, коли операція здійснюється за допомогою безлічі хірургічних отворів. Це може привести до зменшення болю, швидшого відновлення та мінімізування шрамів. 4 UA 98752 C2 5 10 15 Відповідно до оптимального варіанту конструкції даного винаходу, хірургічний апарат для накладання швів може бути побудований у більш складному варіанті. По-перше, хірургічна роботизована система для управління першою рухомою частиною 30а та другою рухомою частиною 30b може збирати історію операцій першої робочої частини 30а та виявляти місцезнаходження першої шовної частини 40а з урахуванням наміченої точки. При цьому, передбачається, що перша шовна частина 40а вже знаходиться близько до тканин, які необхідно зашивати, а намічена точка заздалегідь визначена хірургічною роботизованою системою. Також, хірургічна роботизована система може автоматично контролювати другу рухому частину 30b, враховуючи операційну історію першої рухомої частини 30а та місце знаходження першої шовної частини 40а, таким чином, що друга шовна частина 40b може бути розташована близько до першої шовної частини 40а. І потім, оператор може розташувати нижню опору 42 другої шовної частини 40b навпроти верхньої опори 41 першої шовної частини 40а. Для реалізації вище вказаного, технології контролю місцезнаходження можуть бути використані відповідно до тих, що відомі з рівня техніки (наприклад, заявка No. 2004-143243 на патент США, опублікована 22 липня 2004). Хоча варіанти конструкції даного винаходу були проілюстровані та описані, фахівці у цій галузі зрозуміють, що різні зміни та модифікації можуть бути зроблені без відступу від суті і сфери застосування винаходу, як це визначено у формулі винаходу. 20 ФОРМУЛА ВИНАХОДУ 25 30 35 1. Хірургічний пристрій для накладання швів з функціями зшивання, який містить опору, хірургічну голку та рухому частину голки, причому опора, хірургічна голка та рухома частина голки утворюють шовну частину, при цьому хірургічна голка рухається у напрямку до опори за допомогою рухомої частини голки, і перші шовні нитки з хірургічної голки та другі шовні нитки з опори чергуються одна з одною під час операції. 2. Хірургічний пристрій за п. 1, який відрізняється тим, що додатково містить рухому частину, яка включає щонайменше одну частину для сполучення для забезпечення спільного з шовною частиною руху. 3. Хірургічний пристрій за п. 1, який відрізняється тим, що шовна частина виконує принаймні один з наступних видів швів: тришаровий шов, трирядковий шов, чотирирядковий шов, шов "зигзаг" і паралельний шов, шов двома голками, еластичний шов, підігнутий шов, вишивання, нашивка, сліпий шов, обметування шва та перев'язка шва. 4. Хірургічний пристрій за п. 1, який відрізняється тим, що рухома частина голки сформована з можливістю руху вздовж направляючої рейки. 5. Хірургічний пристрій за п. 1, який відрізняється тим, що опора і рухома частина голки мають частину, що повертається. 5 UA 98752 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSurgical suture apparatus having sewing function
Автори англійськоюYoon, Sang Jin
Назва патенту російськоюХирургическое устройство для наложения швов с функциями сшивания
Автори російськоюЮн Санг Джин
МПК / Мітки
МПК: A61B 17/072
Мітки: швів, зшивання, пристрій, накладання, функціями, хірургічний
Код посилання
<a href="https://ua.patents.su/8-98752-khirurgichnijj-pristrijj-dlya-nakladannya-shviv-z-funkciyami-zshivannya.html" target="_blank" rel="follow" title="База патентів України">Хірургічний пристрій для накладання швів з функціями зшивання</a>
Пристрій для накладання хірургічних швів на м’які тканини
Номер патенту: 40917
Опубліковано: 27.04.2009
Автори: Вовк Олег Юрійович, Вовк Юрій Миколайович, Журавльова Юлія Павлівна
МПК: A61B 5/00
Мітки: м'які, пристрій, тканини, швів, хірургічних, накладання
Формула / Реферат:
1. Пристрій для накладання хірургічних швів на м'які тканини, що містить дерев'яну основу і рамку з різними штучними тканинами, який відрізняється тим, що пошарово закріплені у рамці тканини, які імітують м'які тканини тіла людини: шкіра - бежевий дерматин; підшкірна жирова клітковина - жовтий ватин; поверхнева фасція - білий тонкий флізелін; власна фасція - білий цупкий флізелін; м'яз - червоний поролон.2. Пристрій для накладання...
Пристрій для дозованого накладання швів
Номер патенту: 3792
Опубліковано: 15.12.2004
Автори: Даценко Андрій Васильович, Годлевський Аркадій Іванович
МПК: A61B 17/06
Мітки: пристрій, дозованого, накладання, швів
Формула / Реферат:
Пристрій для дозованого накладання швів, який характеризується тим, що має ручку та стилет з насадками різного калібру від 1,5 мм до 5 мм в діаметрі.
Пристрій для накладання скобкових швів
Номер патенту: 217
Опубліковано: 31.08.1998
Автори: Ринський Михайло Ісаакович, Геник Степан Миколайович, Криса Василь Михайлович
МПК: A61B 17/068
Мітки: скобкових, пристрій, швів, накладання
Формула / Реферат:
Пристрій для накладання скобкових швів, який виконаний із стержневих затискачів з матрицями, зв'язаних між собою, причому на одному Із затискачів виконаний канал під дріт кінематично з'єднаний з механізмом його подачі і ріжучим ножем, який відрізняється тим, що матричні затискачі, зв'язані через підпружинений приводний повзун а натискним гачком, змонтовані на корпусі, справа на кінці якого розміщена знімна фільєра, котушка з скобкою і...
Пінцет для накладання швів

Номер патенту: 36377
Опубліковано: 27.10.2008
Автори: Шумко Богдан Іванович, Луканьова Світлана Михайлівна, Сенютович Роман Васильович, Гушул Іван Ярославович
МПК: A61B 17/00
Мітки: накладання, пінцет, швів
Формула / Реферат:
Пінцет для накладання швів, що складається з двох бранш, який відрізняється тим, що кінці бранш заокруглені з отвором в центрі діаметром 2,0 мм та на внутрішній поверхні містять радіальні насічки, що запобігають ковзанню пінцета при захопленні країв розсіченого органа.
Хірургічний апарат для зшивання кісткової тканини
Номер патенту: 47154
Опубліковано: 17.06.2002
Автори: Ткач Андрій Анатолійович, Ковальчук Анатолій Васильович, Болюх Борис Опанасович
МПК: A61B 17/072, A61B 17/56
Мітки: хірургічний, апарат, зшивання, тканини, кісткової
Формула / Реферат:
Хірургічний апарат для зшивання кісткової тканини, що містить два ричаги, корпус та механізм виштовхування скобок, який відрізняється тим, що він обладнаний рухомим ричагом, який рухається відносно нерухомого в сагітальній площині і складається з підпружиненої рукоятки, упорної частини та упорної ділянки, корпусом, де знаходиться касета для скобок і притискач, який за допомогою пружини автоматично підводить скобки до отвору, пружинним...
Попередній патент: Пристрій для очищення телуру методом вакуумної дистиляції
Наступний патент: Спосіб виготовлення виробів з легких бетонів і виріб з легкого бетону, виготовлений цим способом
Випадковий патент: Спосіб профілактики та лікування запальних захворювань слизової оболонки порожнини рота у дітей з розщілинами твердого та м'якого піднебіння