Спосіб визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру
Номер патенту: 98808
Опубліковано: 12.05.2015
Автори: Чепурний Володимир Іванович, Бабець Євген Костянтинович, Козаріз Володимир Янкович, Ляш Сергій Іванович

Формула / Реферат
Спосіб визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, що включає розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних коливань досліджуємої шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, реєстрацію в кожній заданій точці спостережень механічних коливань шахтної підйомної посудини й обробку одержаних даних з визначенням рівня механічних коливань шахтної підйомної посудини, який відрізняється тим, що приймання пристроєм механічних коливань досліджуємої шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюють на досліджуваній шахтній підйомній посудині в кожній заданій точці спостереження, що рівномірно розміщені по довжині похилого шахтного стовбура одночасно в трьох взаємно перпендикулярних напрямках, а саме - повздовжньому, поперечному та висхідному з одночасною їх реєстрацією, а обробку одержаних даних здійснюють по кожному напрямку з визначенням, одним із відомих способів, інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру.
Текст
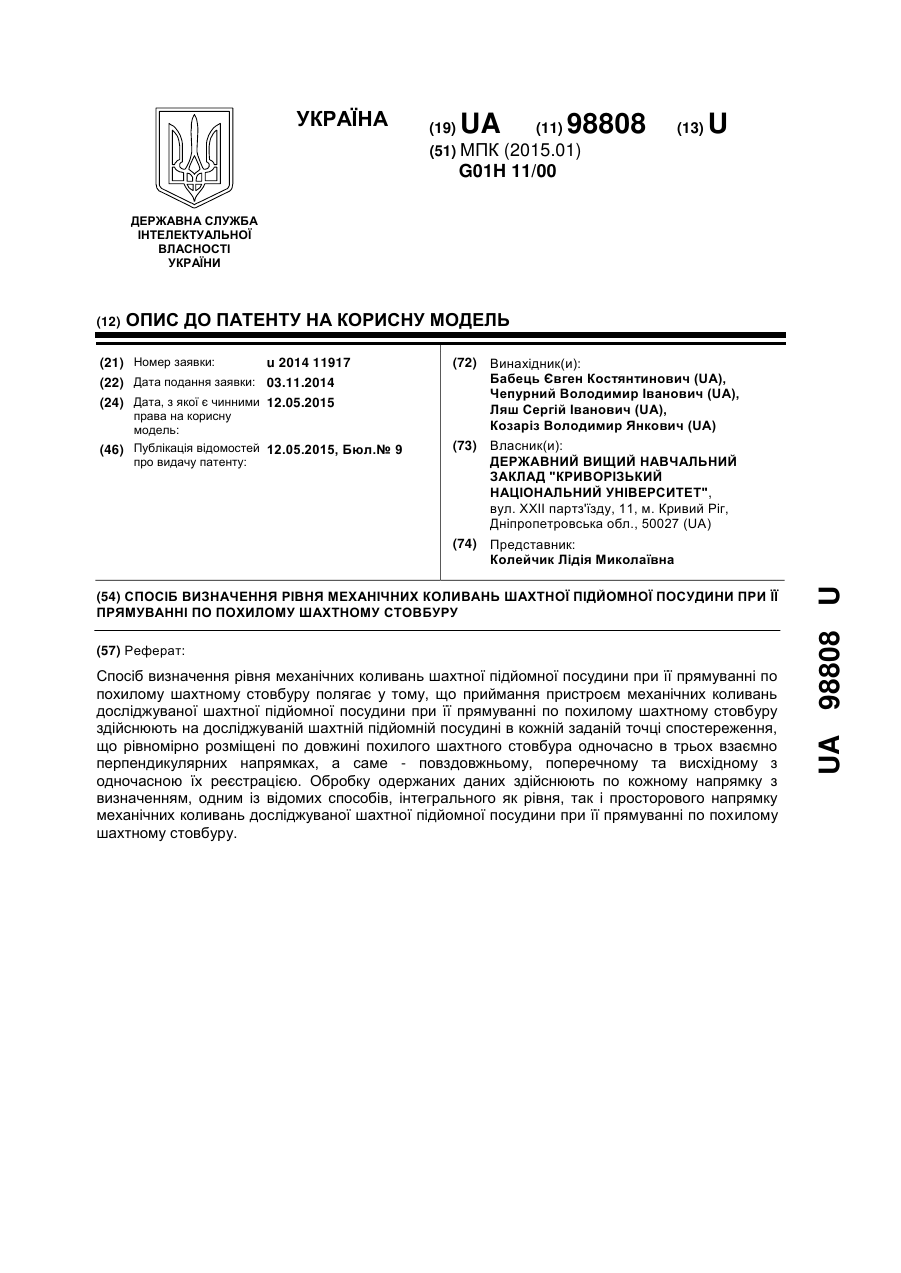
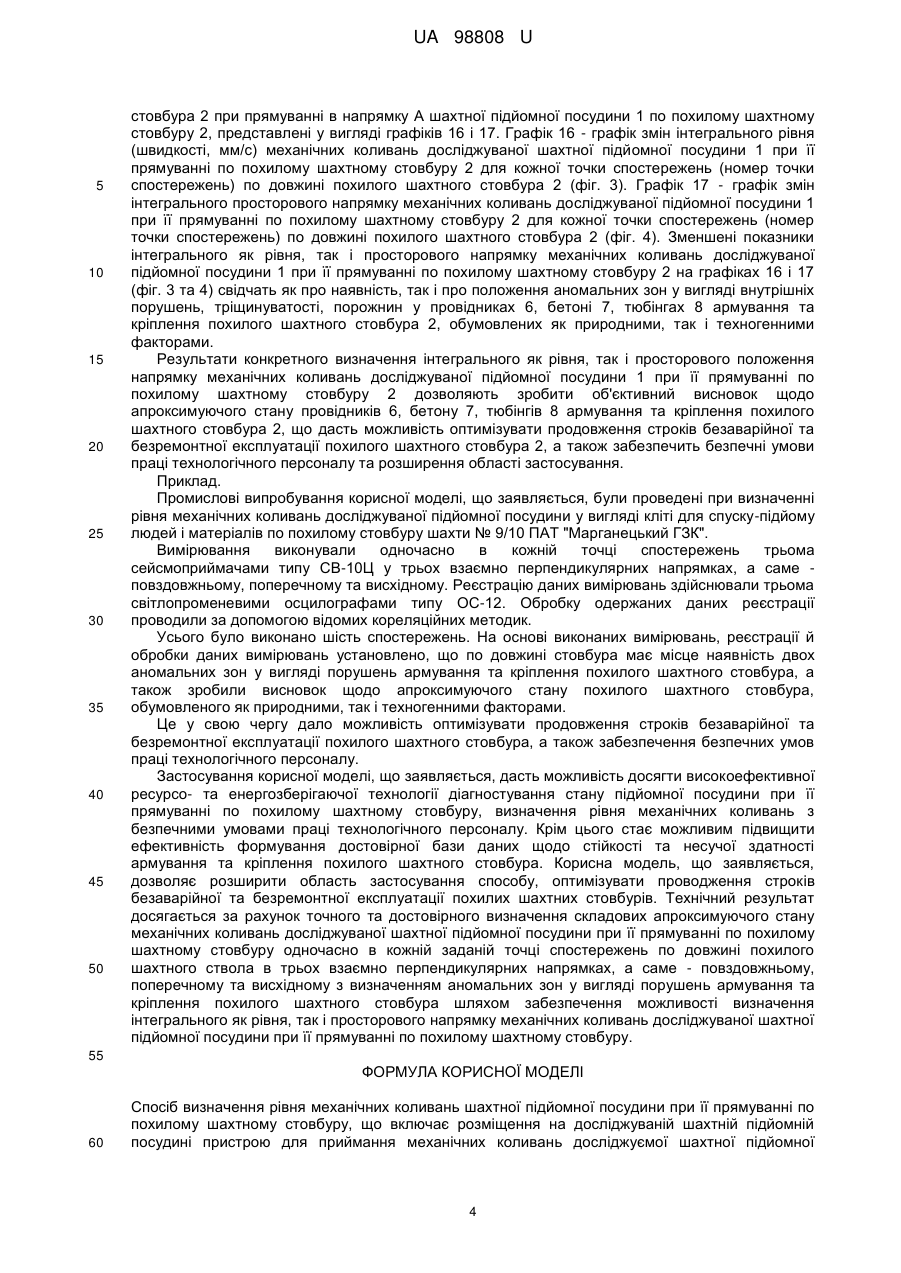
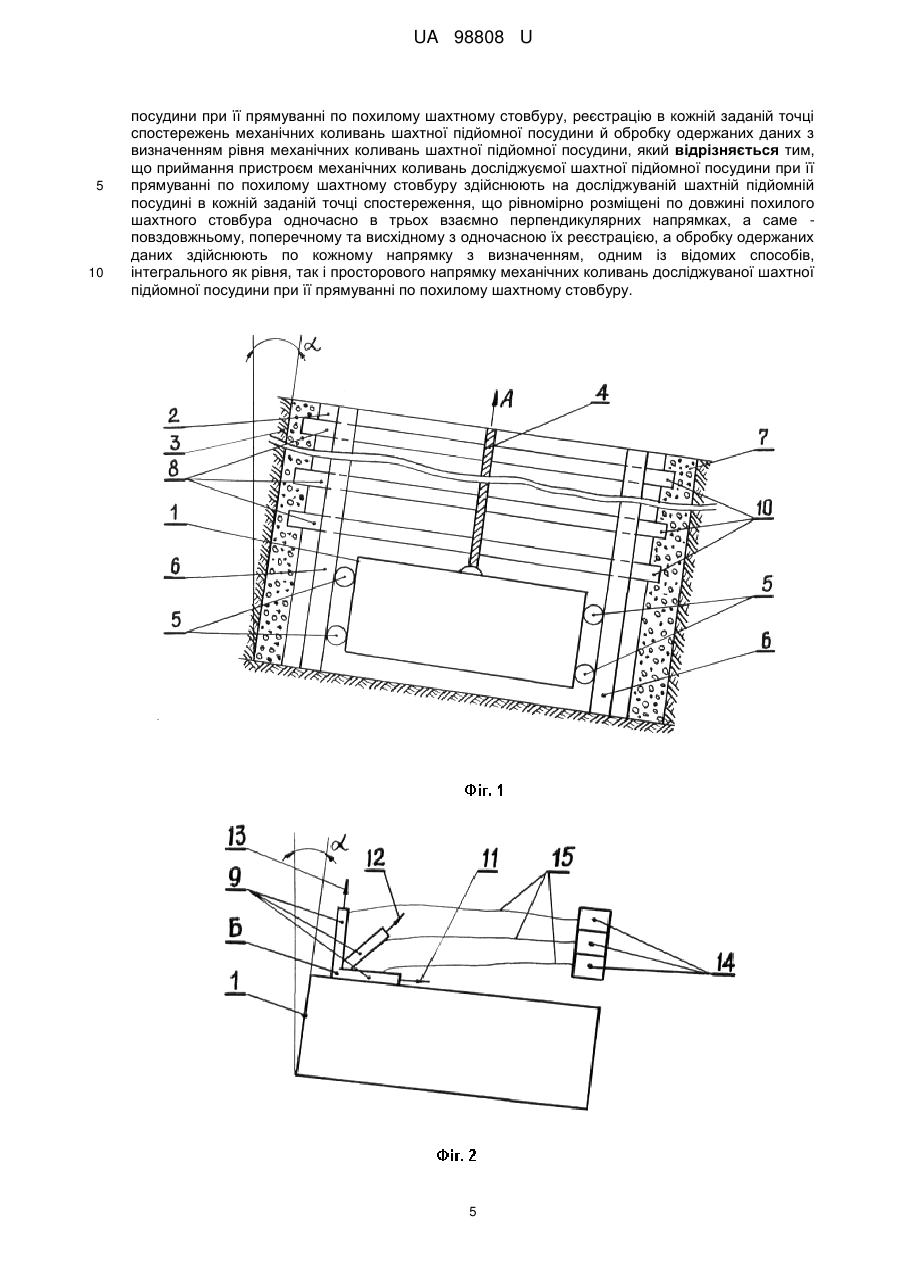
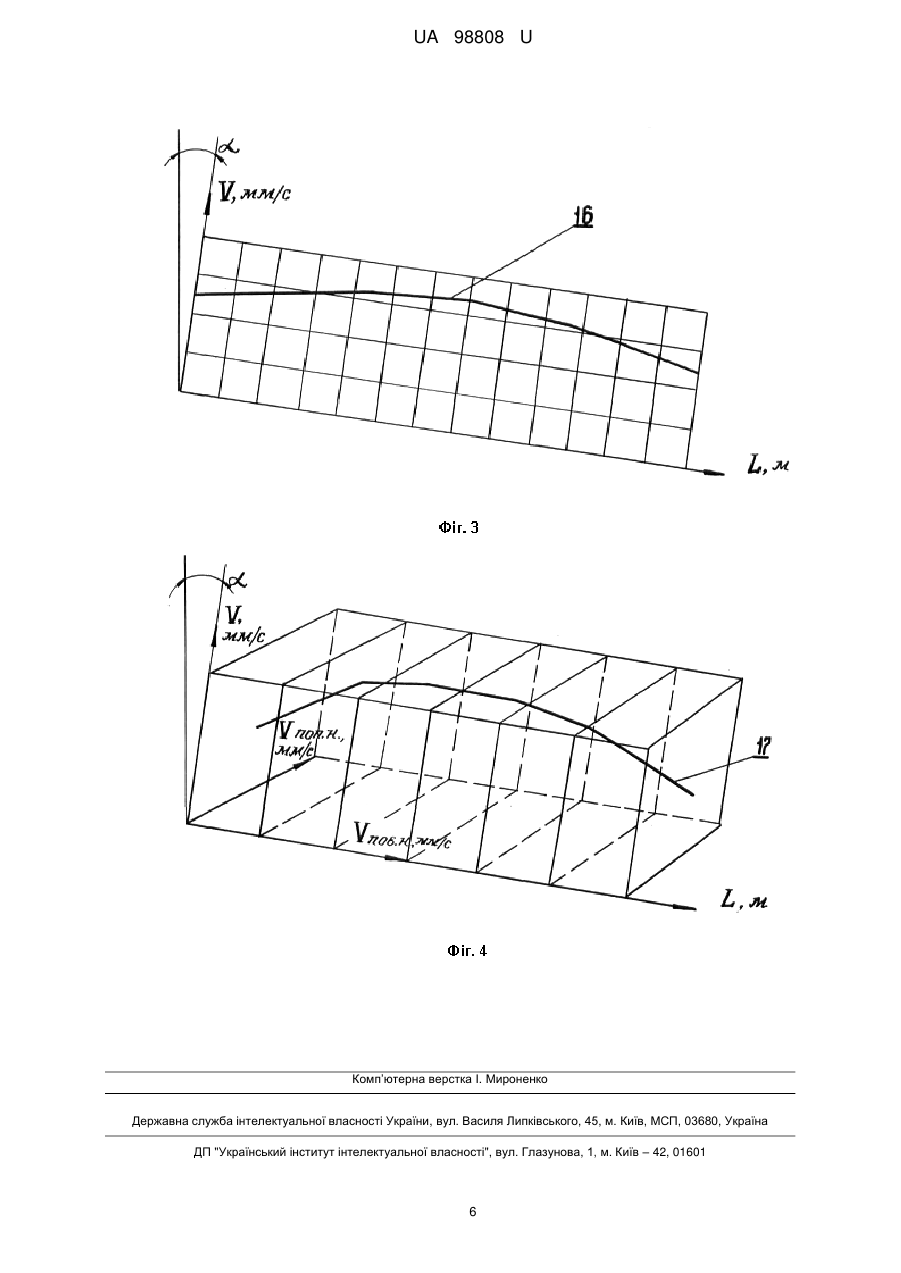
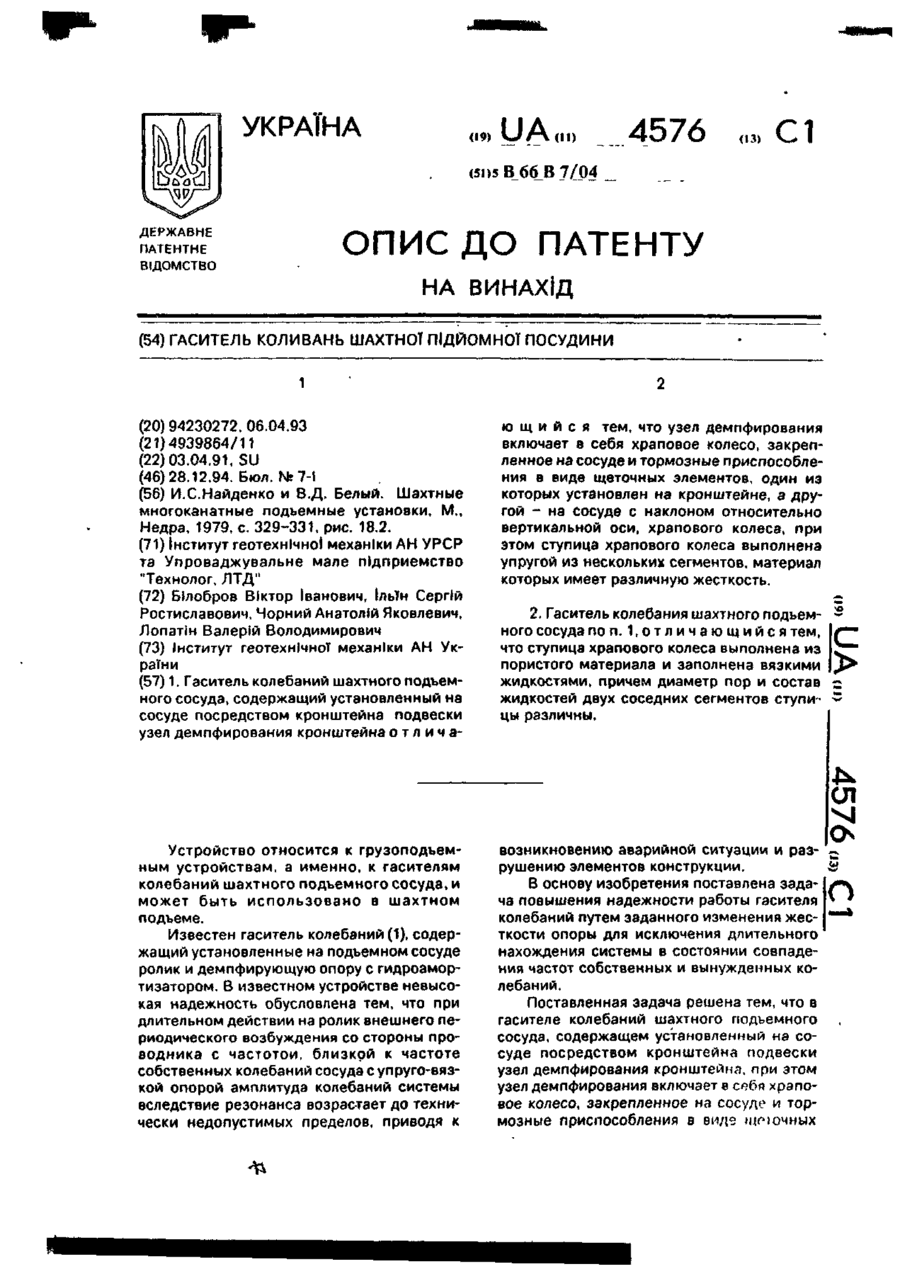
Реферат: Спосіб визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру полягає у тому, що приймання пристроєм механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюють на досліджуваній шахтній підйомній посудині в кожній заданій точці спостереження, що рівномірно розміщені по довжині похилого шахтного стовбура одночасно в трьох взаємно перпендикулярних напрямках, а саме - повздовжньому, поперечному та висхідному з одночасною їх реєстрацією. Обробку одержаних даних здійснюють по кожному напрямку з визначенням, одним із відомих способів, інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. UA 98808 U (12) UA 98808 U UA 98808 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до гірничої справи, а саме до методів технічних досліджень стану армування та кріплення похилого шахтного стовбура при прямуванні по ньому шахтної підйомної посудини, та призначена для визначення інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. Найбільш близьким технічним рішенням, вибраним як прототип, є спосіб визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, що включає розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, реєстрацію в кожній заданій точці спостережень механічних коливань шахтної підйомної посудини та обробку одержаних даних з визначенням рівня механічних коливань (Технические средства сейсморазведки. - В кн.: И.И. Гурвич, В.П. Новоконов Сейсморазведка. Справочник геофизика. - М.: "Недра", 1981. - С. 150-152, 157-159, 233-237). Згідно з прототипом, при визначенні рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру пристроєм для приймання механічних коливань є одиночний електродинамічний сейсмоприймач типу СВ-10Ц, що приймає механічні коливання тільки у висхідному напрямку. Реєстрацію механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру тільки у висхідному напрямку здійснюють за допомогою світлопроменевого осцилографа типу ОС-12 або Н-700. Обробку одержаних даних здійснюють за допомогою відомих кореляційних методик. Як значення рівня механічних коливань застосовують такий показник як швидкість коливань (мм/с) поверхні твердого середовища тільки у висхідному напрямку. Недоліками відомого способу є мала ефективність формування бази даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура при прямуванні по ньому шахтної підйомної посудини, вузька область застосування. Недоліки викликані тим, що визначення рівня механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру виконують у послідовності, що включає розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних коливань шахтної підйомної посудини тільки у висхідному напрямку, реєстрацію механічних коливань у кожній заданій точці спостережень і обробку одержаних даних з визначенням рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру тільки у висхідному напрямку. Дані обставини не дозволяють забезпечити достатньо можливу точність і достовірність визначення інтегрального як рівня, так і просторового напрямку механічних коливань шахтної підйомної посудини при її прямуванні по висхідному шахтному стовбуру. Крім цього зазначене визначення рівня механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру не дасть можливості сформувати достовірну базу даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура при прямуванні по ньому шахтної підйомної посудини з диференціацією технічної діагностики стану армування та кріплення похилого шахтного стовбура. Отже відомий спосіб має вузьку область застосування та відповідно не сприяє експлуатації армування та кріплення похилого шахтного стовбура в безаварійному та безремонтному режимах. Причинами, що перешкоджають одержанню технічного результату прототипом корисної моделі, що заявляється, є: - розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних коливань шахтної підйомної посудини тільки у висхідному напрямку приводить до малої ефективності забезпечення достатньо можливої точності та достовірності визначення інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини, вузької області застосування та відповідно не забезпечить оптимізацію продовження строків безаварійної та безремонтної експлуатації армування та кріплення похилого шахтного стовбура; - реєстрація в кожній заданій точці спостереження механічних коливань досліджуваної шахтної підйомної посудини тільки у висхідному напрямку приводить до неможливості визначення складових стану досліджуваної шахтної підйомної посудини в трьох взаємно перпендикулярних напрямках, вузької області застосування та відповідно не забезпечить оптимізацію продовження строків безаварійної та безремонтної експлуатації армування та кріплення похилого шахтного стовбура; - обробка одержаних даних з визначенням рівня механічних коливань шахтної підйомної посудини тільки у висхідному напрямку приводить до низького рівня формування бази даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура та 1 UA 98808 U 5 10 15 20 25 30 35 40 45 50 55 60 відповідно не забезпечить оптимізацію продовження строків безаварійної та безремонтної експлуатації армування та кріплення похилого шахтного стовбура. В основу корисної моделі, що заявляється, поставлена задача удосконалення способу визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, в якому, шляхом забезпечення можливості визначення інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру за рахунок точного та достовірного визначення складових рівня механічних коливань досліджуваної шахтної підйомної посудини одночасно в кожній заданій точці спостережень, що рівномірно розміщені по довжині похилого шахтного стовбура в трьох взаємно перпендикулярних напрямках механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. Технічний результат від використання корисної моделі полягає в підвищенні ефективності формування бази даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура з диференціацією технічної діагностики стану армування та кріплення при прямуванні по похилому шахтному стовбуру шахтної підйомної посудини, розширення області застосування й оптимізації продовження строків безаварійної та безремонтної експлуатації армування та кріплення похилого шахтного стовбура із забезпеченням безпечних умов праці технологічного персоналу. Поставлена задача вирішується тим, що у способі визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, що включає розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, реєстрацію механічних коливань підйомної посудини та обробку одержаних даних з визначенням рівня механічних коливань досліджуваної шахтної підйомної посудини, згідно з корисною моделлю, приймання пристроєм механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюють на досліджуваній шахтній підйомній посудині в кожній заданій точці спостережень, що рівномірно розміщені по довжині похилого шахтного стовбура одночасно в трьох взаємно перпендикулярних напрямках, а саме - повздовжньому, поперечному та висхідному з одночасною їх реєстрацією, а обробку одержаних даних здійснюють по кожному напрямку з визначенням, одним із відомих способів, інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. Суттєвими ознаками корисної моделі, що заявляється, є: - розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру; - реєстрація механічних коливань шахтної підйомноїпосудини при її прямуванні по похилому шахтному стовбуру; - обробку одержаних даних реєстрації з визначенням рівня механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. Новими суттєвими ознаками корисної моделі, що заявляється, є: - приймання пристроєм механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюють одночасно на досліджуваній шахтній підйомній посудині в трьох взаємно перпендикулярних напрямках, а саме – вертикальному, повздовжньому та поперечному в кожній заданій точці спостережень, що рівномірно розміщені по довжині вертикального шахтного стовбура; - реєстрація механічних коливань шахтної підйомної посудини при її прямуванні по вертикальному шахтному стовбуру здійснюється одночасно на досліджуваній шахтній підйомній посудині в трьох взаємно перпендикулярних напрямках, а саме - повздовжньому, поперечному та висхідному в кожній заданій точці спостережень, що рівномірно розміщені по довжині похилого шахтного стовбура; - обробка одержаних даних реєстрації механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюється по кожному напрямку з визначенням, одним із відомих способів, інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. Завдяки тому, що приймання механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюють одночасно в трьох взаємно перпендикулярних напрямках стає можливим досягти точного та достовірного визначення 2 UA 98808 U 5 10 15 20 25 30 35 40 45 50 55 60 складових стану механічних коливань досліджуваної шахтної підйомної посудини, то це буде сприяти підвищенню ефективності формування бази даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура, розширенню області застосування. Завдяки тому, що реєстрація механічних коливань шахтної підйомної посудини здійснюють в трьох взаємно перпендикулярних напрямках стає можливим за одну реєстрацію механічних коливань досліджуваної шахтної підйомної посудини розширити об'єм інформації щодо стану досліджуваної шахтної підйомної посудини, розширити область застосування й оптимізувати продовження строків безаварійної та безремонтної експлуатації армування та кріплення похилого шахтного стовбура. Завдяки тому, що обробка одержаних даних реєстрації механічних коливань шахтної підйомної посудини здійснюється по кожному напрямку з визначенням, одним із відомих способів, інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини стає можливим за одну обробку даних реєстрації механічних коливань досліджуваної шахтної підйомної посудини досягти одержання конкретного для даної досліджуваної шахтної підйомної посудини фізичного стану з визначенням як наявності, так і положень аномальних зон у вигляді внутрішніх порушень, тріщинуватості, армування та кріплення похилого шахтного стовбура, обумовлених як природними, так і техногенними факторами, то це буде сприяти підвищенню ефективності формування бази даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура з диференціацією технічної діагностики стану армування та кріплення при прямуванні по похилому шахтному стовбуру шахтної підйомної посудини, розширенню області застосування й оптимізації продовження строків безаварійної та безремонтної експлуатації армування та кріплення похилого шахтного стовбура, що дасть можливість забезпечити безпечні умови праці технологічного персоналу. Суть корисної моделі, що заявляється, пояснюється кресленнями, де: - на фіг. 1 зображений вертикальний розріз частини породного масиву, в якому збудовано похилий шахтний стовбур з підйомною шахтною посудиною, на якій вимірюють рівень механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру; - на фіг. 2 - схема одночасного вимірювання механічних коливань досліджуваної шахтної підйомної посудини в трьох взаємно перпендикулярних напрямках, а саме - повздовжньому, поперечному та висхідному; - на фіг. 3 - графік змін інтегрального рівня (швидкості) механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру по довжині похилого шахтного стовбура; - на фіг. 4 - графік змін в трьох взаємно перпендикулярних напрямках, а саме повздовжньому, поперечному та висхідному, інтегрального просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по довжині похилого шахтного стовбура. Спосіб здійснюється наступним чином. На досліджуваній шахтній підйомній посудині 1 похилого шахтного стовбура 2, збудованого під кутом α до вертикалі в породному масиві 3, виконують вимірювання рівня механічних коливань досліджуваної шахтної підйомної посудини 1, що прямує по довжині похилого шахтного стовбура 2 в напрямку А за допомогою підйомного каната 4. Посудина 1 прямує на роликах 5 по провідникам 6. Похилий шахтний стовбур 2 має кріплення з бетону 7, в який вмонтовано тюбінги 8 (фіг. 1). Вимірювання виконують у пункті Б на досліджуваній підйомній посудині 1 шахтного стовбура 2 пристроями 9 для приймання механічних коливань досліджуваної підйомної посудини 1 похилого шахтного стовбура 2 в точках спостереження 10, рівномірно розміщених по довжині похилого шахтного стовбура 2. Вимірювання проводять одночасно в кожній заданій точці спостережень 10, що відповідають розміщенню тюбінгів 8, трьома пристроями 9 у трьох взаємно перпендикулярних напрямках, а саме - поздовжньому 11, поперечному 12 та висхідному 13. Дані вимірювань по кожному напрямку 11, 12, 13 реєструються реєстраторами рівня механічних коливань 14, що з'єднані з пристроями 9 гнучкими кабелями 15 (фіг. 2). Обробку одержаних даних реєстрації виконують із застосуванням одного з відомих способів за допомогою відомих кореляційних методик. Така послідовність і характер вимірювань, реєстрації та обробки даних вимірювань дозоляють одночасно визначити для кожної точки спостережень інтегральний як рівень, так і просторовий напрямок механічних коливань досліджуваної шахтної підйомної посудини 1 похилого шахтного стовбура 2 при прямуванні в напрямку А шахтної підйомної посудини 1 по похилому шахтному стовбуру 2. Дані визначення рівня механічних коливань досліджуваної підйомної посудини 1 похилого шахтного 3 UA 98808 U 5 10 15 20 25 30 35 40 45 50 стовбура 2 при прямуванні в напрямку А шахтної підйомної посудини 1 по похилому шахтному стовбуру 2, представлені у вигляді графіків 16 і 17. Графік 16 - графік змін інтегрального рівня (швидкості, мм/с) механічних коливань досліджуваної шахтної підйомної посудини 1 при її прямуванні по похилому шахтному стовбуру 2 для кожної точки спостережень (номер точки спостережень) по довжині похилого шахтного стовбура 2 (фіг. 3). Графік 17 - графік змін інтегрального просторового напрямку механічних коливань досліджуваної підйомної посудини 1 при її прямуванні по похилому шахтному стовбуру 2 для кожної точки спостережень (номер точки спостережень) по довжині похилого шахтного стовбура 2 (фіг. 4). Зменшені показники інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної підйомної посудини 1 при її прямуванні по похилому шахтному стовбуру 2 на графіках 16 і 17 (фіг. 3 та 4) свідчать як про наявність, так і про положення аномальних зон у вигляді внутрішніх порушень, тріщинуватості, порожнин у провідниках 6, бетоні 7, тюбінгах 8 армування та кріплення похилого шахтного стовбура 2, обумовлених як природними, так і техногенними факторами. Результати конкретного визначення інтегрального як рівня, так і просторового положення напрямку механічних коливань досліджуваної підйомної посудини 1 при її прямуванні по похилому шахтному стовбуру 2 дозволяють зробити об'єктивний висновок щодо апроксимуючого стану провідників 6, бетону 7, тюбінгів 8 армування та кріплення похилого шахтного стовбура 2, що дасть можливість оптимізувати продовження строків безаварійної та безремонтної експлуатації похилого шахтного стовбура 2, а також забезпечить безпечні умови праці технологічного персоналу та розширення області застосування. Приклад. Промислові випробування корисної моделі, що заявляється, були проведені при визначенні рівня механічних коливань досліджуваної підйомної посудини у вигляді кліті для спуску-підйому людей і матеріалів по похилому стовбуру шахти № 9/10 ПАТ "Марганецький ГЗК". Вимірювання виконували одночасно в кожній точці спостережень трьома сейсмоприймачами типу СВ-10Ц у трьох взаємно перпендикулярних напрямках, а саме повздовжньому, поперечному та висхідному. Реєстрацію даних вимірювань здійснювали трьома світлопроменевими осцилографами типу ОС-12. Обробку одержаних даних реєстрації проводили за допомогою відомих кореляційних методик. Усього було виконано шість спостережень. На основі виконаних вимірювань, реєстрації й обробки даних вимірювань установлено, що по довжині стовбура має місце наявність двох аномальних зон у вигляді порушень армування та кріплення похилого шахтного стовбура, а також зробили висновок щодо апроксимуючого стану похилого шахтного стовбура, обумовленого як природними, так і техногенними факторами. Це у свою чергу дало можливість оптимізувати продовження строків безаварійної та безремонтної експлуатації похилого шахтного стовбура, а також забезпечення безпечних умов праці технологічного персоналу. Застосування корисної моделі, що заявляється, дасть можливість досягти високоефективної ресурсо- та енергозберігаючої технології діагностування стану підйомної посудини при її прямуванні по похилому шахтному стовбуру, визначення рівня механічних коливань з безпечними умовами праці технологічного персоналу. Крім цього стає можливим підвищити ефективність формування достовірної бази даних щодо стійкості та несучої здатності армування та кріплення похилого шахтного стовбура. Корисна модель, що заявляється, дозволяє розширити область застосування способу, оптимізувати проводження строків безаварійної та безремонтної експлуатації похилих шахтних стовбурів. Технічний результат досягається за рахунок точного та достовірного визначення складових апроксимуючого стану механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру одночасно в кожній заданій точці спостережень по довжині похилого шахтного ствола в трьох взаємно перпендикулярних напрямках, а саме - повздовжньому, поперечному та висхідному з визначенням аномальних зон у вигляді порушень армування та кріплення похилого шахтного стовбура шляхом забезпечення можливості визначення інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Спосіб визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру, що включає розміщення на досліджуваній шахтній підйомній посудині пристрою для приймання механічних коливань досліджуємої шахтної підйомної 4 UA 98808 U 5 10 посудини при її прямуванні по похилому шахтному стовбуру, реєстрацію в кожній заданій точці спостережень механічних коливань шахтної підйомної посудини й обробку одержаних даних з визначенням рівня механічних коливань шахтної підйомної посудини, який відрізняється тим, що приймання пристроєм механічних коливань досліджуємої шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру здійснюють на досліджуваній шахтній підйомній посудині в кожній заданій точці спостереження, що рівномірно розміщені по довжині похилого шахтного стовбура одночасно в трьох взаємно перпендикулярних напрямках, а саме повздовжньому, поперечному та висхідному з одночасною їх реєстрацією, а обробку одержаних даних здійснюють по кожному напрямку з визначенням, одним із відомих способів, інтегрального як рівня, так і просторового напрямку механічних коливань досліджуваної шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру. 5 UA 98808 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюBabets Yevhen Kostiantynovych, Chepurnyi Volodymyr Ivanovych, Liash Serhii Ivanovych, Kozariz Volodymyr Yankovych
Автори російськоюБабец Евгений Константинович, Чепурный Владимир Иванович, Ляш Сергей Иванович, Козариз Владимир Янкович
МПК / Мітки
МПК: G01H 11/00
Мітки: шахтному, посудини, коливань, похилому, прямуванні, спосіб, підйомної, визначення, рівня, стовбуру, шахтної, механічних
Код посилання
<a href="https://ua.patents.su/8-98808-sposib-viznachennya-rivnya-mekhanichnikh-kolivan-shakhtno-pidjjomno-posudini-pri-pryamuvanni-po-pokhilomu-shakhtnomu-stovburu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення рівня механічних коливань шахтної підйомної посудини при її прямуванні по похилому шахтному стовбуру</a>
Гаситель коливань шахтної підйомної посудини
Номер патенту: 4576
Опубліковано: 28.12.1994
Автори: Ільїн Сергій Ростиславович, Лопатин Валерій Володимирович, Чорний Анатолій Яковлевич, Білобров Віктор Іванович
МПК: B66B 7/02
Мітки: шахтної, посудини, підйомної, коливань, гаситель
Формула / Реферат:
(57) 1. Гаситель колебаний шахтного подъемного сосуда, содержащий установленный на сосуде посредством кронштейна подвески узел демпфирования кронштейна отличающийся тем, что узел демпфирования включает в себя храповое колесо, закреп ленное на сосуде и тормозные приспособления в виде щеточных элементов, один из которых установлен на кронштейне, а другой - на сосуде с наклоном относительно вертикальной оси, храпового колеса, при этом ступица...
Напрямний пристрій шахтної підйомної посудини
Номер патенту: 40180
Опубліковано: 25.03.2009
Автори: Соломенцев Анатолій Іванович, Соломенцев Костянтин Анатольович, Труш Іван Омелянович, Труш Кирило Анатольович
Мітки: посудини, шахтної, напрямний, підйомної, пристрій
Формула / Реферат:
Напрямний пристрій шахтної підйомної посудини, що містить станину, на якій встановлені пересувні роликоопори, який відрізняється тим, що корпус кожної роликоопори містить плиту з напрямними канавками, в які заходять ребра станини, ребра мають клиноподібні потовщення, що взаємодіють зі скосами притискної планки, при цьому вісь роликоопори з обох торців має внутрішню різьбу під болти і лиски під ключ, а головка болта і шайби виконані у вигляді...
Пристрій для керування переміщенням підйомної посудини в шахтному стволі
Номер патенту: 81833
Опубліковано: 11.02.2008
Автори: Пристром Володимир Адольфович, Бежок Віктор Романович, Чехлатий Андрій Миколайович, Дворников Михайло Володимирович, Грядущий Борис Абрамович, Дворников Володимир Іванович
МПК: G01G 13/00, B03B 13/00
Мітки: підйомної, посудини, керування, стволі, пристрій, переміщенням, шахтному
Формула / Реферат:
Пристрій для керування переміщенням підйомної посудини в шахтному стволі, що містить блок контролю та керування навантажувального пункту, до складу якого входять привід обвалення гірської маси в дозатор, привід живильника та конвеєра, привід клапана герметизації, привід секторного затвора, привід гасника швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик...
Спосіб визначення рівня механічних коливань поверхні твердого середовища при дії на його поверхню динамічних навантажень механічного походження
Номер патенту: 84903
Опубліковано: 11.11.2013
Автори: Чепурний Володимир Іванович, Нечепуренко Олександр Семенович, Ляш Сергій Іванович, Бабець Євген Костянтинович
МПК: G01H 11/00
Мітки: поверхню, поверхні, спосіб, коливань, дії, визначення, динамічних, походження, механічного, механічних, навантажень, рівня, середовища, твердого
Формула / Реферат:
Спосіб визначення рівня механічних коливань поверхні твердого середовища при дії на його поверхню динамічних навантажень механічного походження, що включає розміщення в кожній заданій точці спостережень на досліджуваній поверхні твердого середовища пристрою для приймання механічних коливань досліджуваної поверхні твердого середовища при дії на його поверхню динамічних навантажень механічного походження, реєстрацію їх і обробку одержаних...
Напрямний башмак шахтної підйомної посудини
Номер патенту: 75018
Опубліковано: 15.02.2006
Автори: Пристром Володимир Адольфович, Куриленко Валерій Костянтинович, Алексєєв Володимир Юрійович
МПК: B66B 7/02
Мітки: шахтної, башмак, підйомної, посудини, напрямний
Формула / Реферат:
Направляющий башмак шахтного подъемного сосуда, содержащий корпус, в котором размещены сменные вкладыши и, крепежные элементы, отличающийся тем, что, с целью повышения долговечности, лобовой и боковые вкладыши выполнены в виде сплошных прямолинейных брусьев, закрепленных на корпусе прижимными накладками с возможностью перемещения вкладышей в направлении рабочих поверхностей проводника, причем между основаниями вкладышей и корпусом размещены...
Попередній патент: Гібридна силова установка рейкового транспорту
Наступний патент: Танк спеціального призначення
Випадковий патент: Проліки на основі сполук 2,4-піримідиндіаміну і їх застосування