Пристрій для керування переміщенням підйомної посудини в шахтному стволі
Номер патенту: 81833
Опубліковано: 11.02.2008
Автори: Чехлатий Андрій Миколайович, Пристром Володимир Адольфович, Бежок Віктор Романович, Дворников Володимир Іванович, Грядущий Борис Абрамович, Дворников Михайло Володимирович



Формула / Реферат
Пристрій для керування переміщенням підйомної посудини в шахтному стволі, що містить блок контролю та керування навантажувального пункту, до складу якого входять привід обвалення гірської маси в дозатор, привід живильника та конвеєра, привід клапана герметизації, привід секторного затвора, привід гасника швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик аварійного рівня, датчик вагового дозування, датчик дозатора розвантаження, датчик завантаження транспортної посудини, датчики відкриття та закриття секторного затвора, датчики відкриття та закриття клапана герметизації, датчики відкриття та закриття гасника швидкості, три перемикачі і блок контролю та керування машиніста підйому, до складу якого входять датчик "транспортна посудина розвантажена" та електродвигун, вихід якого з'єднаний з барабаном підйомної машини, який відрізняється тим, що в блок контролю та керування навантажувального пункту введені мікроконтролер та три регістри, інформаційні виходи першого й другого регістрів підключені до шини даних мікроконтролера, інформаційні входи третього регістра підключені до відповідних виходів мікроконтролера, виходи датчика наявності гірської маси в бункері, двох датчиків приходу транспортної посудини під завантаження, датчика аварійного рівня, датчика дозатора розвантаження, датчика завантаження транспортної посудини та перший і другий виходи датчика вагового дозування підключені до відповідних інформаційних входів першого регістра, виходи датчиків відкриття та закриття секторного затвора, датчиків відкриття та закриття клапана герметизації, датчиків відкриття та закриття гасника швидкості та першого і другого перемикачів підключені до відповідних інформаційних входів другого регістра, перший, другий і третій виходи третього перемикача з'єднані з відповідними входами/виходами мікроконтролера, четвертий і п’ятий входи/виходи якого з'єднані з адресними входами відповідно першого та другого регістрів, входи приводу обвалення гірської маси в дозатор і приводу живильника та конвеєра підключені відповідно до першого й другого виходів третього регістра, перший і другий входи приводу клапана герметизації підключені відповідно до третього й четвертого виходів третього регістра, перший і другий входи приводу секторного затвора підключені відповідно до п'ятого й шостого виходів третього регістра, а перший і другий входи приводу гасника швидкості гірської маси підключені відповідно до сьомого й восьмого виходів третього регістра, при цьому в блок контролю та керування машиніста підйому введені клавіатура, мікроконтролер, шина даних останнього з'єднана з відповідною шиною математичного співпроцесора й клавіатури, тактовий генератор, вихід синхронізації якого з'єднаний із входом математичного співпроцесора, а вхід - із відповідним виходом мікроконтролера, схема індикації, інформаційний вхід якої з'єднаний із відповідним виходом мікроконтролера, цифро-аналоговий перетворювач, інформаційний вхід якого з'єднаний із відповідним виходом мікроконтролера, а адресний вхід - із відповідними входом схеми індикації та виходом мікроконтролера, схема керування випрямлячами, вхід якої з'єднаний з виходом цифро-аналогового перетворювача, керовані випрямлячі, вхід яких з'єднаний з виходом схеми керування випрямлячами, а вихід з'єднаний з ланцюгами електроживлення електродвигуна, датчик струму, вхід якого з'єднаний з виходом керованих випрямлячів, а вихід - з першим аналоговим входом мікроконтролера, датчик швидкості, вхід якого з'єднаний з ротором двигуна підйомної машини, а вихід - з другим аналоговим входом мікроконтролера, датчик шляху, вхід якого з'єднаний з барабаном підйомної машини, а вихід - з першим інформаційним входом мікроконтролера, другий інформаційний вхід якого з'єднаний з виходом датчика "транспортна посудина розвантажена", а вхід/вихід мікроконтролера з'єднаний з відповідним виходом/входом мікроконтролера блока контролю та керування навантажувального пункту.
Текст
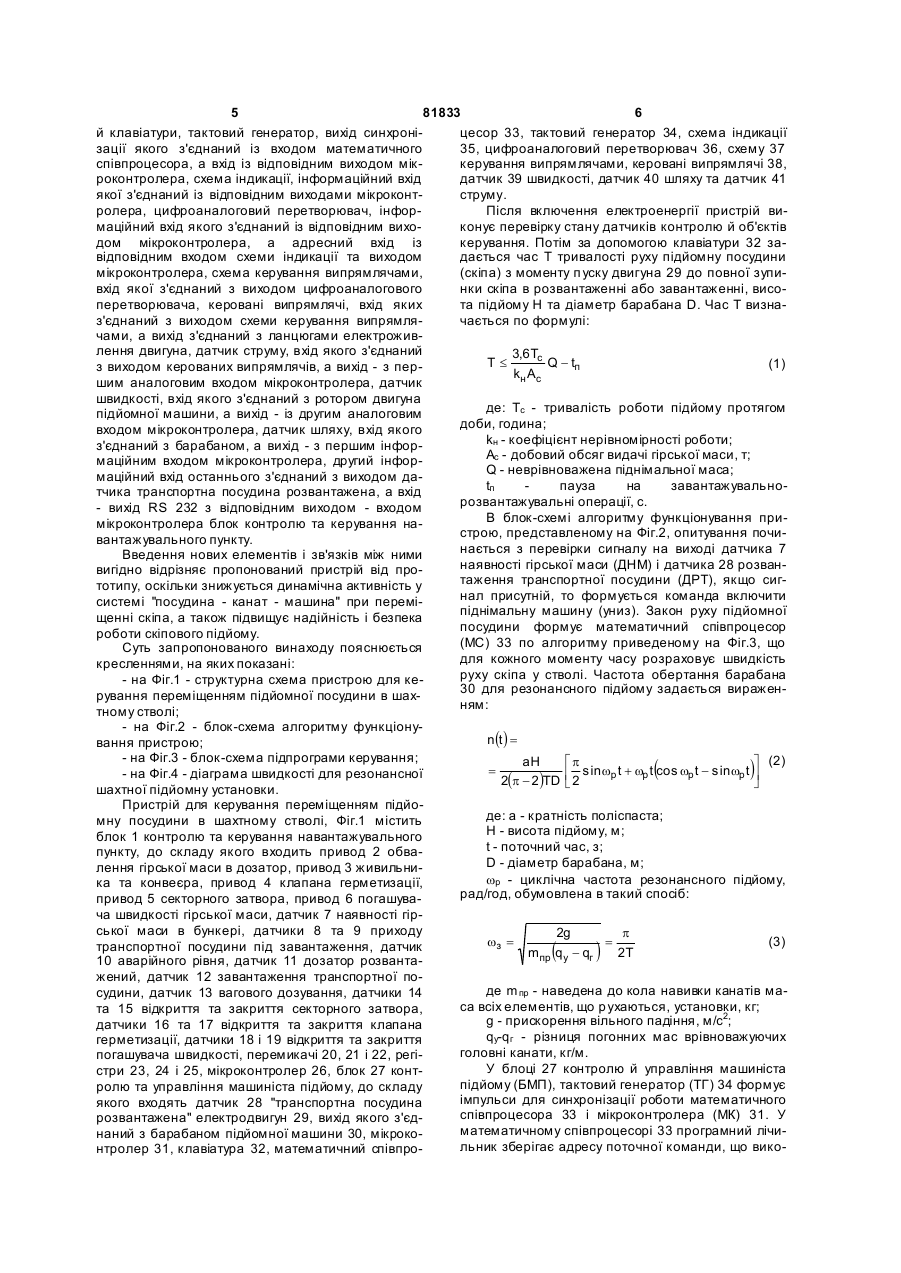
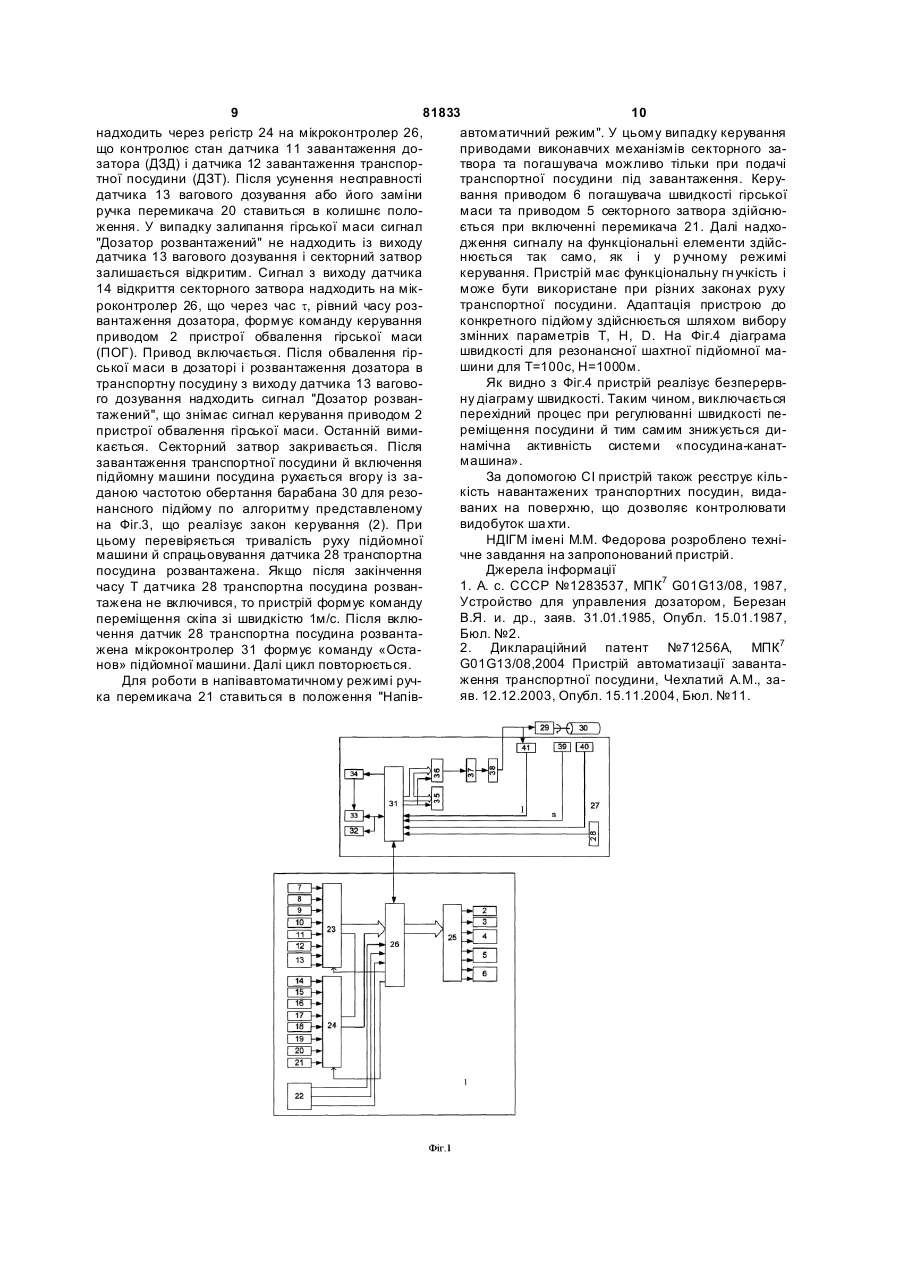
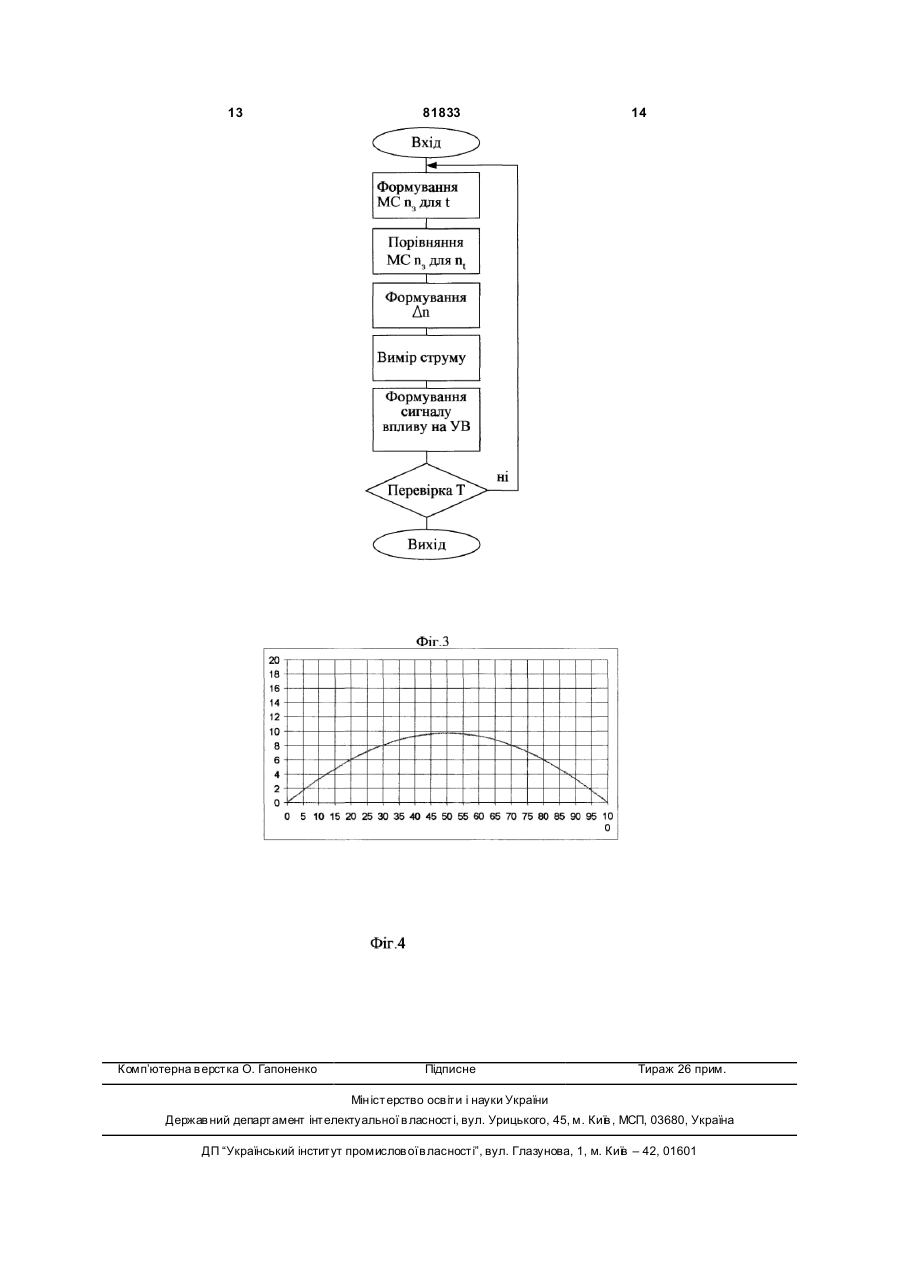
Пристрій для керування переміщенням підйомної посудини в шахтному стволі, що містить блок контролю та керування навантажувального пункту, до складу якого входять привід обвалення гірської маси в дозатор, привід живильника та конвеєра, привід клапана герметизації, привід секторного затвора, привід гасника швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик аварійного рівня, датчик вагового дозування, датчик дозатора розвантаження, датчик завантаження транспортної посудини, датчики відкриття та закриття секторного затвора, датчики відкриття та закриття клапана герметизації, датчики відкриття та закриття гасника швидкості, три перемикачі і блок контролю та керування машиніста підйому, до складу якого входять датчик "транспортна посудина розвантажена" та електродвигун, ви хід якого з'єднаний з барабаном підйомної машини, який відрізняється тим, що в блок контролю та керування навантажувального пункту введені мікроконтролер та три регістри, інформаційні виходи першого й другого регістрів підключені до шини даних мікроконтролера, інформаційні входи третього регістра підключені до відповідних виходів мікроконтролера, виходи датчика наявнос 2 (19) 1 3 81833 4 лячів, а вихід - з першим аналоговим входом мікним входом мікроконтролера, другий інформаційроконтролера, датчик швидкості, вхід якого з'єднаний вхід якого з'єднаний з виходом датчика ний з ротором двигуна підйомної машини, а вихід "транспортна посудина розвантажена", а вхід/ви хід з другим аналоговим входом мікроконтролера, мікроконтролера з'єднаний з відповідним виходатчик шляху, вхід якого з'єднаний з барабаном дом/входом мікроконтролера блока контролю та підйомної машини, а вихід - з першим інформаційкерування навантажувального пункту. Винахід належить до пристроїв керування підйомними машинами й може бути використаний при керуванні завантажувальним пристроєм скіпового підйому з ваговим або об'ємним дозуванням гірської маси, що розвантажується в транспортну посудину. Відомий пристрій для керування дозатором [1], до складу якого входять датчики, приводи та апаратура автоматичного керування дозаторами, що розвантажуються циклічно у транспортну посудину. До недоліку відомого пристрою варто віднести низьку надійність і безпеку роботи скіпового підйому. З відомих пристроїв найбільш близьким по технічній суті що заявляється є пристрій для керування дозатором [2], який містить привод обвалення гірської маси в дозатор, привод живильника та конвеєра, привод клапана герметизації, привод секторного затвора, привод погашувача швидкості, датчик вагового дозування, датчики відкриття та закриття секторного затвора, датчики відкриття та закриття клапана герметизації, датчики відкриття та закриття погашувача швидкості, датчики приходу транспортної посудини під завантаження, датчик наявності гірської маси в бункері, датчик аварійного рівня, датчик завантаження транспортної посудини, датчик дозатор розвантажений і три перемикачі. Пристрій формує сигнали включити або виключити підйомну машину, а швидкість переміщення скіпа нагору (униз) реалізується кусочно безперервною діаграмою. При відпрацьовуванні кожного інтервалу руху в системі "посудина - канат - машина" виникають перехідні процеси, що супроводжуються додатковими динамічними навантаженнями, які збільшуються при переміщенні вгору, внаслідок відсутності регулювання швидкості руху від навантаження, що знижує надійність і безпеку роботи підйомної машини. До недоліку зазначеного пристрою варто також віднести складність технічної реалізації і як наслідок низьку його надійність. Завданням винаходу є усунення впливу динамічної активності в системі "посудина - канат - машина" при переміщенні скіпа вгору (униз) шляхом забезпечення резонансного підйому з урахуванням завантаження скіпа. Це дозволить збільшити довговічність роботи підйомної машини, елементів трансмісії, підвісних пристроїв. Крім того, зменшення апаратних засобів підвищує надійність і безпеку роботи скіпового підйому. Поставлене задача вирішується тим, що в пристрій для керування переміщенням підйомну посудини в шахтному стволі, що містить блок кон тролю та керування навантажувального пункту до складу якого входять привод обвалення гірської маси в дозатор, привод живильника та конвеєра, привод клапана герметизації, привод секторного затвора, привод погашувача швидкості гірської маси, датчик наявності гірської маси в бункері, два датчики приходу транспортної посудини під завантаження, датчик аварійного рівня, датчик вагового дозування, датчик дозатор розвантажений, датчик завантаження транспортної посудини, датчики відкриття та закриття секторного затвора, датчики відкриття та закриття клапана герметизації, датчики відкриття та закриття погашувача швидкості, три перемикачі і блок контролю та управління машиніста підйому, до складу якого входять датчик транспортна посудина розвантажено, електродвигун ви хід якого з'єднаний з барабаном підйомної машини яке, відповідно до винаходу, у блок контролю та керування навантажувального пункту введені мікроконтролер, три регістри інформаційні виходи першого й другого регістрів підключені до шини даних мікроконтролера, інформаційні входи третього регістра підключений до відповідних виходів мікроконтролера, виходи датчика наявності гірської маси в бункері, двох датчиків приходу транспортної посудини під завантаження, датчика аварійного рівня, датчика дозатор розвантажений, датчика завантаження транспортної посудини, а також перший і другий виходи датчика вагового дозування підключені до відповідних інформаційних входів першого регістра, виходи датчиків відкриття та закриття секторного затвора, датчиків відкриття та закриття клапана герметизації, датчиків відкриття та закриття погашувача швидкості, першого та другого перемикача підключені до відповідних інформаційних входів друго го регістра, перший, другий і третій виходи третього перемикача з'єднані з відповідними входами - виходами мікроконтролера, третій і четвертий входи - ви ходи якого з'єднані з адресними входами відповідно першого й другого регістрів, входи привода обвалення гірської маси в дозатор, привода живильника та конвеєра підключені відповідно до першого й другого виходу третього регістра, перший і другий входи привода клапана герметизації підключені відповідно до третього і четвертого виходу третього регістра, перший і другий входи привода секторного затвора підключені відповідно до п'ятого й шостого ви ходу третього регістра, а перший та другий привод погашувача швидкості гірської маси підключені відповідно до сьомого й восьмого виходу третього регістра в блок контролю та управління машиніста підйому введені клавіатура, мікроконтролер, шина даних останнього з'єднана з відповідною шиною математичного співпроцесора 5 81833 6 й клавіатури, тактовий генератор, вихід синхроніцесор 33, тактовий генератор 34, схема індикації зації якого з'єднаний із входом математичного 35, цифроаналоговий перетворювач 36, схему 37 співпроцесора, а вхід із відповідним виходом міккерування випрямлячами, керовані випрямлячі 38, роконтролера, схема індикації, інформаційний вхід датчик 39 швидкості, датчик 40 шляху та датчик 41 якої з'єднаний із відповідним виходами мікроконтструму. ролера, цифроаналоговий перетворювач, інфорПісля включення електроенергії пристрій вимаційний вхід якого з'єднаний із відповідним вихоконує перевірку стану датчиків контролю й об'єктів дом мікроконтролера, а адресний вхід із керування. Потім за допомогою клавіатури 32 завідповідним входом схеми індикації та виходом дається час Τ тривалості руху підйомну посудини мікроконтролера, схема керування випрямлячами, (скіпа) з моменту п уску двигуна 29 до повної зупивхід якої з'єднаний з виходом цифроаналогового нки скіпа в розвантаженні або завантаженні, висоперетворювача, керовані випрямлячі, вхід яких та підйому Η та діаметр барабана D. Час Τ визназ'єднаний з виходом схеми керування випрямлячається по формулі: чами, а вихід з'єднаний з ланцюгами електроживлення двигуна, датчик струму, вхід якого з'єднаний 3,6Tc T£ Q - tп (1) з виходом керованих випрямлячів, а вихід - з перkн Ас шим аналоговим входом мікроконтролера, датчик швидкості, вхід якого з'єднаний з ротором двигуна де: Тс - тривалість роботи підйому протягом підйомної машини, а вихід - із другим аналоговим доби, година; входом мікроконтролера, датчик шляху, вхід якого kн - коефіцієнт нерівномірності роботи; з'єднаний з барабаном, а вихід - з першим інфорАс - добовий обсяг видачі гірської маси, т; маційним входом мікроконтролера, другий інфорQ - неврівноважена піднімальної маса; маційний вхід останнього з'єднаний з виходом даtп пауза на завантажувальнотчика транспортна посудина розвантажена, а вхід розвантажувальні операції, с. - вихід RS 232 з відповідним виходом - входом В блок-схемі алгоритму функціонування примікроконтролера блок контролю та керування настрою, представленому на Фіг.2, опитування почивантажувального пункту. нається з перевірки сигналу на виході датчика 7 Введення нових елементів і зв'язків між ними наявності гірської маси (ДНМ) і датчика 28 розванвигідно відрізняє пропонований пристрій від протаження транспортної посудини (ДРТ), якщо сигтотипу, оскільки знижується динамічна активність у нал присутній, то формується команда включити системі "посудина - канат - машина" при переміпіднімальну машину (униз). Закон руху підйомної щенні скіпа, а також підвищує надійність і безпека посудини формує математичний співпроцесор роботи скіпового підйому. (МС) 33 по алгоритму приведеному на Фіг.3, що Суть запропонованого винаходу пояснюється для кожного моменту часу розраховує швидкість кресленнями, на яких показані: руху скіпа у стволі. Частота обертання барабана - на Фіг.1 - структурна схема пристрою для ке30 для резонансного підйому задається вираженрування переміщенням підйомної посудини в шахням: тному стволі; - на Фіг.2 - блок-схема алгоритму функціонуn(t ) = вання пристрою; - на Фіг.3 - блок-схема підпрограми керування; aH ép ù (2) = sinwp t + wp t cos wp t - sinwp t ú - на Фіг.4 - діаграма швидкості для резонансної 2(p - 2)TD ê 2 ë û шахтної підйомну установки. Пристрій для керування переміщенням підйоде: а - кратність поліспаста; мну посудини в шахтному стволі, Фіг.1 містить Η - висота підйому, м; блок 1 контролю та керування навантажувального t - поточний час, з; пункту, до складу якого входить привод 2 обваD - діаметр барабана, м; лення гірської маси в дозатор, привод 3 живильниwp - циклічна частота резонансного підйому, ка та конвеєра, привод 4 клапана герметизації, рад/год, обумовлена в такий спосіб: привод 5 секторного затвора, привод 6 погашувача швидкості гірської маси, датчик 7 наявності гірської маси в бункері, датчики 8 та 9 приходу 2g p wз = = (3) транспортної посудини під завантаження, датчик mпр qу - qг 2Т 10 аварійного рівня, датчик 11 дозатор розвантажений, датчик 12 завантаження транспортної поде m пр - наведена до кола навивки канатів масудини, датчик 13 вагового дозування, датчики 14 са всіх елементів, що р ухаються, установки, кг; та 15 відкриття та закриття секторного затвора, g - прискорення вільного падіння, м/с2; датчики 16 та 17 відкриття та закриття клапана qу-qг - різниця погонних мас врівноважуючих герметизації, датчики 18 і 19 відкриття та закриття головні канати, кг/м. погашувача швидкості, перемикачі 20, 21 і 22, регіУ блоці 27 контролю й управління машиніста стри 23, 24 і 25, мікроконтролер 26, блок 27 контпідйому (БМП), тактовий генератор (ТГ) 34 формує ролю та управління машиніста підйому, до складу імпульси для синхронізації роботи математичного якого входять датчик 28 "транспортна посудина співпроцесора 33 і мікроконтролера (МК) 31. У розвантажена" електродвигун 29, вихід якого з'єдматематичному співпроцесорі 33 програмний лічинаний з барабаном підйомної машини 30, мікрокольник зберігає адресу поточної команди, що виконтролер 31, клавіатура 32, математичний співпро ( ( ) ) 7 81833 8 нується, і пов'язаний з пам'яттю програм, з якої мікроконтролер 26, що формує команду «Відкривитягається команда по вищевказаній адресі. Код ти». З відповідних ви ходів регістра 25 сигнал надкоманди надходить у регістр команд і передається ходить на привод 6 погашувача швидкості гірської в декодер команд, після чого арифметико-логічний маси (ПГШ) і привод 5 секторного затвора (ПСЗ) й пристрій розраховує результат виконання операції відкриває їх. Гірська маса з дозатора надходить у і повертає його в певний регістр. Отримане в рескіп. Гаситель швидкості гірської маси сповільнює зультаті всіх обчислень значення передається в рух потоку гірської маси при завантаженні її з домікроконтролер 31 для обробки результату. Однозатора в транспортну посудину, це дозволяє змечасно сигнали з виходу датчика 39 швидкості (ДШ) ншити дроблення вугілля, тобто не губиться його і датчика 40 путі (ДП) надходять на мікроконтросортність, зменшується зношування протилежної лер 31, де визначається місцезнаходження скіпа і стінки транспортної посудини і його напрямних обчислюється різниця між заданою частотою обевтулок. При повному розвантаженні дозатора в ртання барабана 30 для резонансного підйому n3 і скіп датчик 13 вагового дозування видає сигнал «Дозатор розвантажений», що через регістр 23 поточного nТ по формулі: Dn(t1)=n 3-nt. надходить на мікроконтролер 26. Останній формує Далі за допомогою датчика 41 струму (ДС) викоманду керування, що через регістр 25 надходить міряється струм на виході керованого випрямляча на привод 5 секторного затвора й закриває його. (KB) 38, що пропорційний моменту на валу двигуна 29. Після відпрацьовування помилки між задаСигнал з датчика 15 секторний затвор закритий (ДЗС) надходить через регістр 24 на мікроконтроної та фактичною швидкістю мікроконтролер 31 лер 26, а потім через послідовний порт RS232 на через цифроаналоговий перетворювач (ЦАП) 36 мікроконтролер 31 блоку 27 контролю та управлінформує сигнал впливу на схему 37 керування виня машиніста підйому й включає піднімальну мапрямлячами (СКВ). Потім перевіряється тривалість руху підйомної машини вниз (по алгоритму шину для підняття вантажу вгору. У випадку відсутності на виході датчика 13 вагового дозування представленому на Фіг.3) і спрацьовування датчисигналу «Дозатор розвантажений», при сформоків 8 та 9 приходу скіпа під завантаження (ДПр1) і ваній номінальній дозі гірської маси в дозаторі, (ДПр2). Якщо за час Τ датчики 8 та 9 приходу скіпа внаслідок несправності датчика або функціональпід завантаження не включилися, то мікроконтролер 31 у блоці 27 контролю та управління машиніних елементів пристрою керування дозатором, датчик 10 аварійний рівень (ДАР) видає сигнал ста підйому формує команду переміщення скіпа зі "Аварійна доза", що через регістр 23 надходить на швидкістю 1м/с і контролює місця переміщення мікроконтролер 26, який виключає привод 3 живискіпа датчиком 40 путі. Після включення датчиків 8 льники та конвеєра, а потім через послідовний та 9 приходу скіпа під завантаження сигнал з виходу регістра 23 блоку 1 контролю та керування порт RS232 на мікроконтролер 31 блоку 27 контролю та керування машиніста підйому в схему 35 навантажувального пункту (БНП) надходить через індикації (СІ). При цьому привод 3 живильники та послідовний RS232 порт мікроконтролера 26 на конвеєра вимикається і завантаження дозатора відповідний вхід мікроконтролера 31 блоку 27 конприпиняється. Сформована доза гірської маси в тролю та управління машиніста підйому, що формує команду «Останов» підйомної машини. Потім дозаторі не приведе до перевантаження транспортної посудини, у результаті якого може відбутися мікроконтролер 26 через регістр 25 блоку 1 контобрив канатів, що приводить до аварії. Розвантаролю та керування навантажувального пункту фоження дозатора в транспортну посудину при сформує команду «Відкрити», що надходить на привод рмованій у ньому максимальній дозі виконується 4 клапани герметизації (ПКГ). Далі при наявності сигналу на виході датчик 18 клапана герметизації вручн у за допомогою двох перемикачів 21 й 22. Перемикач 21 (П2) служить для відкриття секторвідкритий (ДВК) блоку 1 контролю й керування ного затвора та погашувача швидкості гірської навантажувального пункту включає привод 3 жимаси. При розвантаженні дозатора в транспортну вильники та конвеєра (ПЖК) і гірська маса надхопосудину р учка перемикача 22 ставиться в полодить у дозатор. Тому що оптимальне навантаження на піднімальну машину досягаються при ження "Ручний", а перемикач 21-у положення "Секторний затвор відкритий". При цьому, сигнал з ваговому дозуванні гірської маси (вугілля), то певиходу перемикача 21 надходить на мікроконтроремикач (П1) 20 установлений у положення, при лер 26, що управляє приводом 6 погашувача гірякому пристрій виконує контроль завантаження за ської маси. Погашувач гірської маси відкривається допомогою датчика 13 вагового дозування (ДВД). При досягненні норми завантаження скіпа сигнал з і тим самим знімається заборона на проходження сигналу для відкриття секторного затвора. Після відповідного виходу датчика 13 вагового дозуванрозвантаження дозатора в транспортну посудину ня через регістр 23 надходить на мікроконтролер ручки перемикачів 21 та 22 ставляться в початкове 26, що за допомогою регістра 25 виключає привод положення. Секторний затвор і гаситель закрива3 живильники та конвеєра. В автоматичному режимі сигнал з першого виходу перемикача 22 (ПЗ) ються одночасно. Після усунення несправності пристрій готовий до роботи в автоматичному ренадходить на мікроконтролер 26, що закриває жимі. привод 4 клапани герметизації (ПКГ). Клапан герПристрій здійснює вагове або об'ємне дозуметизації перешкоджає короткому замиканню повання. Ваговий спосіб дозування є переважним. вітряного струменя, що провітрює гірські виробітки через ствол, не завантажений дозатор і приймаОднак, при несправності датчика 13 вагового дозування ручка перемикача 20 переводиться з польний бункер. ложення "Вагове дозування" у положення "Об'ємСигнал з виходу датчика 17 закриття клапана не дозування". Сигнал з виходу перемикача 20 герметизації (ДЗК) через регістр 24 надходить на 9 81833 10 надходить через регістр 24 на мікроконтролер 26, автоматичний режим". У цьому випадку керування що контролює стан датчика 11 завантаження доприводами виконавчих механізмів секторного зазатора (ДЗД) і датчика 12 завантаження транспортвора та погашувача можливо тільки при подачі тної посудини (ДЗТ). Після усунення несправності транспортної посудини під завантаження. Керудатчика 13 вагового дозування або його заміни вання приводом 6 погашувача швидкості гірської ручка перемикача 20 ставиться в колишнє поломаси та приводом 5 секторного затвора здійснюження. У випадку залипання гірської маси сигнал ється при включенні перемикача 21. Далі надхо"Дозатор розвантажений" не надходить із виходу дження сигналу на функціональні елементи здійсдатчика 13 вагового дозування і секторний затвор нюється так само, як і у р учному режимі залишається відкритим. Сигнал з виходу датчика керування. Пристрій має функціональну гн учкість і 14 відкриття секторного затвора надходить на мікможе бути використане при різних законах руху транспортної посудини. Адаптація пристрою до роконтролер 26, що через час t, рівний часу розвантаження дозатора, формує команду керування конкретного підйому здійснюється шляхом вибору змінних параметрів Τ, Η, D. На Фіг.4 діаграма приводом 2 пристрої обвалення гірської маси швидкості для резонансної шахтної підйомної ма(ПОГ). Привод включається. Після обвалення гіршини для Т=100с, Н=1000м. ської маси в дозаторі і розвантаження дозатора в Як видно з Фіг.4 пристрій реалізує безперервтранспортну посудину з виходу датчика 13 вагового дозування надходить сигнал "Дозатор розванну діаграму швидкості. Таким чином, виключається перехідний процес при регулюванні швидкості петажений", що знімає сигнал керування приводом 2 реміщення посудини й тим самим знижується дипристрої обвалення гірської маси. Останній виминамічна активність системи «посудина-канаткається. Секторний затвор закривається. Після машина». завантаження транспортної посудини й включення підйомну машини посудина рухається вгору із заЗа допомогою СІ пристрій також реєструє кількість навантажених транспортних посудин, видаданою частотою обертання барабана 30 для резованих на поверхню, що дозволяє контролювати нансного підйому по алгоритму представленому видобуток ша хти. на Фіг.3, що реалізує закон керування (2). При НДІГМ імені М.М. Федорова розроблено техніцьому перевіряється тривалість руху підйомної машини й спрацьовування датчика 28 транспортна чне завдання на запропонований пристрій. Джерела інформації посудина розвантажена. Якщо після закінчення 1. А. с. СССР №1283537, МПК7 G01G13/08, 1987, часу Τ датчика 28 транспортна посудина розванУстройство для управления дозатором, Березан тажена не включився, то пристрій формує команду В.Я. и. др., заяв. 31.01.1985, Опубл. 15.01.1987, переміщення скіпа зі швидкістю 1м/с. Після включення датчик 28 транспортна посудина розвантаБюл. №2. 2. Диклараційний патент №71256А, МПК7 жена мікроконтролер 31 формує команду «ОстаG01G13/08,2004 Пристрій автоматизації завантанов» підйомної машини. Далі цикл повторюється. ження транспортної посудини, Чехлатий А.М., заДля роботи в напівавтоматичному режимі ручяв. 12.12.2003, Опубл. 15.11.2004, Бюл. №11. ка перемикача 21 ставиться в положення "Напів 11 81833 12 13 Комп’ютерна в ерстка О. Гапоненко 81833 Підписне 14 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of control of hoisting machines in shaft
Автори англійськоюHriaduschyi Borys Abramovych, Dvornykov Volodymyr Ivanovych, Dvornykov Mykhailo Volodymyrovych, Prystrom Volodymyr Adolfovych, Chekhlatyi Andrii Mykolaiovych, Bezhok Viktor Romanovych
Назва патенту російськоюУстройство для управления перемещением подъемной емкости в шахтном стволе
Автори російськоюГрядущий Борис Абрамович, Дворников Владимир Иванович, Дворников Михаил Владимирович, Пристром Владимир Адольфович, Чехлатый Андрей Николаевич, Бежок Виктор Романович
МПК / Мітки
МПК: B03B 13/00, G01G 13/00
Мітки: стволі, керування, шахтному, переміщенням, посудини, пристрій, підйомної
Код посилання
<a href="https://ua.patents.su/7-81833-pristrijj-dlya-keruvannya-peremishhennyam-pidjjomno-posudini-v-shakhtnomu-stvoli.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування переміщенням підйомної посудини в шахтному стволі</a>
Пристрій для керування переміщенням піднімальної посудини в шахтному стволі
Номер патенту: 78348
Опубліковано: 15.03.2007
Автори: Дворников Володимир Іванович, Мялковський Валентин Йосипович, Чехлатий Андрій Миколайович, Грядущий Борис Абрамович, Чехлатий Микола Олександрович
МПК: B66B 1/28
Мітки: пристрій, шахтному, стволі, піднімальної, керування, переміщенням, посудини
Формула / Реферат:
Пристрій для керування переміщенням піднімальної посудини в шахтному стволі, до складу якого входять датчик навантаження, датчик шляхових імпульсів і регулятор тиску механізму гальма, який відрізняється тим, що в нього введені мікропроцесор, дешифратор, адресні входи якого з'єднані з адресними виходами мікропроцесора, перший інформаційний вихід останнього з'єднаний з регулятором тиску механізму гальма, другий - із блоком керування...
Пристрій захисту від напуску каната при застряванні підіймальної посудини у стволі
Номер патенту: 26573
Опубліковано: 11.10.1999
Автори: Прохоренко Вадим Олександрович, Матвієнко Микола Павлович
МПК: B66B 5/12
Мітки: напуску, захисту, пристрій, стволі, посудини, підіймальної, застряванні, каната
Формула / Реферат:
Устройство защиты от напуска каната при застревании подъемного сосуда в стволе, содержащее квантовые генераторы, расположенные на копре, усилители-формирователи, счетчики импульсов и исполнительный орган, отличающееся тем, что в него введены дифференцирующие элементы, при этом выход первого квантового генератора через первый усилитель-формирователь соединен со счетным входом первого счетчика и первым дифференцирующим элементом, выход которого...
Пристрій керування переміщенням дверей
Номер патенту: 1762
Опубліковано: 25.10.1994
Автори: Кондратик Володимир Васильович, Лукавий Роман Мирославович
МПК: G05B 19/19
Мітки: дверей, пристрій, переміщенням, керування
Формула / Реферат:
Устройство управления перемещением дверей, содержащее установленные в зоне движения дверей датчики контроля движущегося объекта и датчики контроля скорости движения дверей, соединенные выходами с входами блока формирования управляющих сигналов, связанного выходами через блок управления электроприводом с электроприводом, кинематически соединенным с дверями, отличающееся тем, что оно снабжено блоком контроля порогового значения скорости...
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу
Номер патенту: 15807
Опубліковано: 17.07.2006
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Почка Костянтин Іванович, Паламарчук Дмитро Анатолійович
МПК: B66C 19/00
Мітки: керування, країні, горизонтальним, переміщенням, стріли, вантажу, зміною, пристрій, вильоту
Формула / Реферат:
Пристрій для керування зміною вильоту стріли у крані з горизонтальним переміщенням вантажу, що складається із хобота, контрхобота, жорсткої відтяжки, вантажного каната та стріли, з механізмом зміни вильоту, який відрізняється тим, що містить шарнірно закріплений до стріли гідроциліндр двосторонньої дії з дросельним регулюванням швидкості переміщення робочої рідини з безштокової у штокову порожнини гідроциліндра при можливості зміни...
Пристрій автоматизації завантаження транспортної посудини
Номер патенту: 71256
Опубліковано: 15.11.2004
Автор: Чехлатий Андрій Миколайович
МПК: G01G 13/00, B03B 13/00
Мітки: посудини, пристрій, завантаження, транспортної, автоматизації
Формула / Реферат:
Пристрій автоматизації завантаження транспортної посудини, що містить шість приводів, три вхідних і дванадцять вихідних каналів, п'ятнадцять елементів ЗАБОРОНА, вісімнадцять елементів АБО, сім елементів І, п'ять елементів НІ, датчик вагового дозування, перший вихід якого через інформаційний вхід першого елемента ЗАБОРОНА з'єднаний з першим входом першого елемента АБО, другий вихід датчика вагового дозування через інформаційний вхід другого...
Попередній патент: Двотактний двигун внутрішнього згоряння
Випадковий патент: Напрямний пристрій проведення заготовки прокату у вертикальних прокатних клітях