Спосіб коректування коефіцієнта посилення ємкісного елемента та пристрій для його здійснення
Формула / Реферат
1. Спосіб коректування коефіцієнта посилення ємкісного елемента, що містить електроди, виконані з можливістю переміщення один щодо одного, причому між електродами встановлюється залишкове поле, який відрізняється тим, що містить кроки, на яких:
подають (10) знижену напругу зсуву постійного струму на один з електродів, причому напруга має значення нижче порогового, для якого залишкове поле, що створюється вказаною зниженою напругою зсуву, є вимірюваним;
вимірюють (11) вихідний сигнал від ємкісного елемента; і розраховують (15) коректування для коефіцієнта посилення ємкісного елемента залежно від виміряного вихідного сигналу.
2. Спосіб за п. 1, який відрізняється тим, що знижена напруга зсуву (10, 12) більше розрахункової напруги зсуву (VE), еквівалентної вказаному залишковому полю.
3. Спосіб за п. 2, який відрізняється тим, що розрахунок коректування коефіцієнта посилення містить крок (20), на якому визначають напрям залишкового поля на основі вимірювання вихідного сигналу від ємкісного елемента (11) при подачі зниженої напруги зсуву, і крок (21), на якому визначають значення залишкового поля на основі вимірювання вихідного сигналу від ємкісного елемента (11) без подачі зниженої напруги зсуву.
4. Спосіб за п. 2, який відрізняється тим, що розрахунок коректування коефіцієнта посилення включає крок, на якому віднімають з вихідного сигналу компонент, який отриманий безпосередньо із зниженої напруги зсуву.
5. Спосіб за п. 1, який відрізняється тим, що включає кроки (11, 13), на яких виконують два послідовні вимірювання вихідного сигналу для зниженої напруги зсуву, що має однакові значення, але протилежні знаки, і розраховують (14) середнє значення отриманих вихідних сигналів.
6. Спосіб за п. 1, який відрізняється тим, що включає попередній крок (8), на якому подають номінальну напругу зсуву.
7. Спосіб за п. 1, який відрізняється тим, що включає стадію установки в початковий стан і збереження даних коректування коефіцієнта посилення, за якою слідує стадія застосування коректування.
8. Спосіб за п. 7, який відрізняється тим, що використовується з ємкісним елементом, включеним в осесиметричний вібраційний гіроскоп, в якому збуджуються коливання, які можуть переміщатися в різні положення, при цьому коректування коефіцієнта посилення виконують для безлічі положень коливань.
9. Пристрій для коректування коефіцієнта посилення ємкісного елемента, що містить електроди, виконані з можливістю переміщення один щодо одного, і засіб подачі сигналу зсуву на один з електродів, який відрізняється тим, що містить засоби подачі (10) зниженої напруги зсуву постійного струму на один з електродів із значенням нижче порогового, для якого може бути виміряне залишкове поле, що генерується вказаною зниженою напругою зсуву; засоби вимірювання вихідного сигналу від ємкісного елемента, і засобу коректування коефіцієнта посилення ємкісного елемента залежно від виміряного вихідного сигналу.
10. Пристрій за п. 9, який відрізняється тим, що включений в осесиметричний вібраційний гіроскоп, в якому збуджуються коливання, які можуть переміщатися в різні положення, при цьому пристрій містить пристрій, що запам'ятовує, для збереження коректувань коефіцієнта посилення для множини положень коливань.
Текст
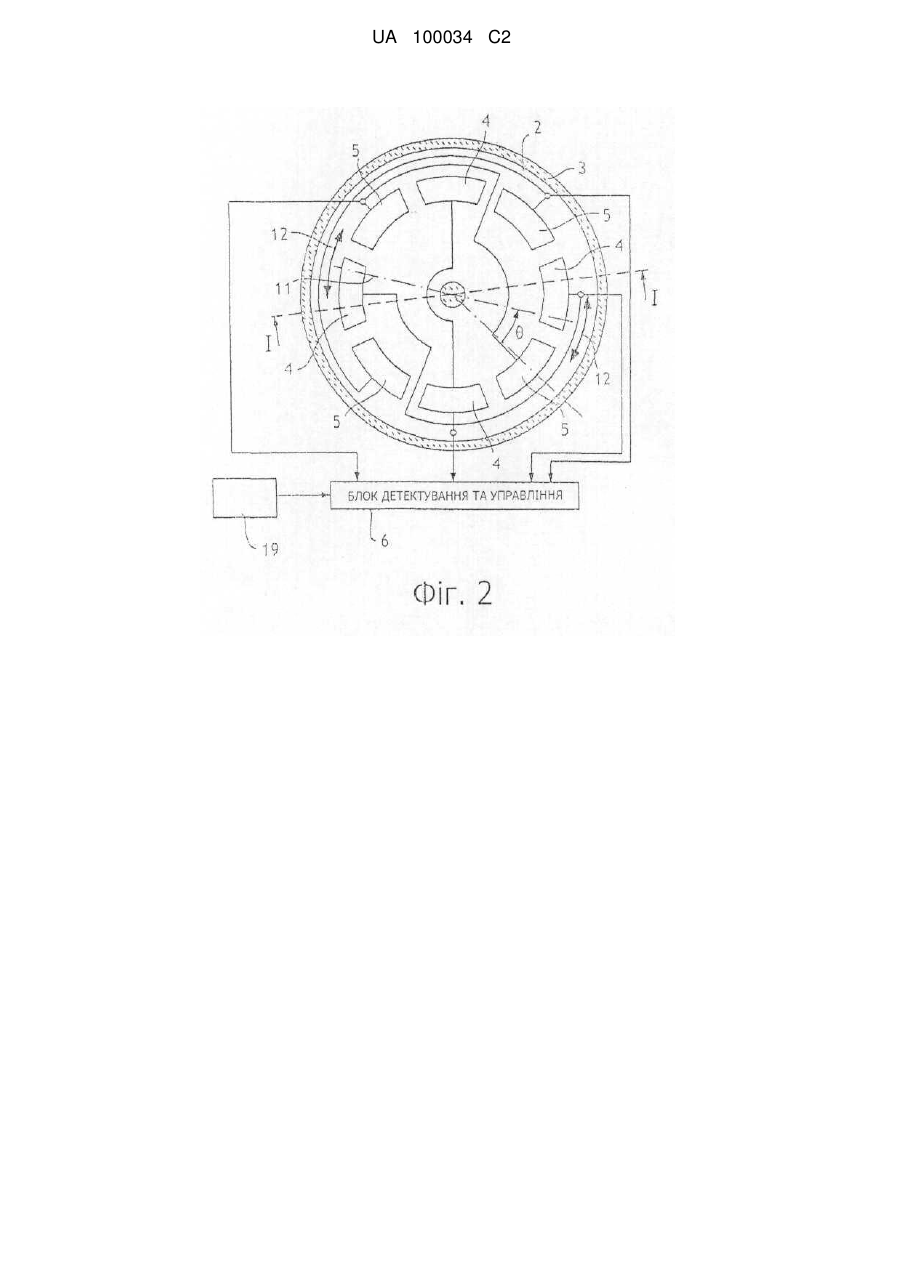
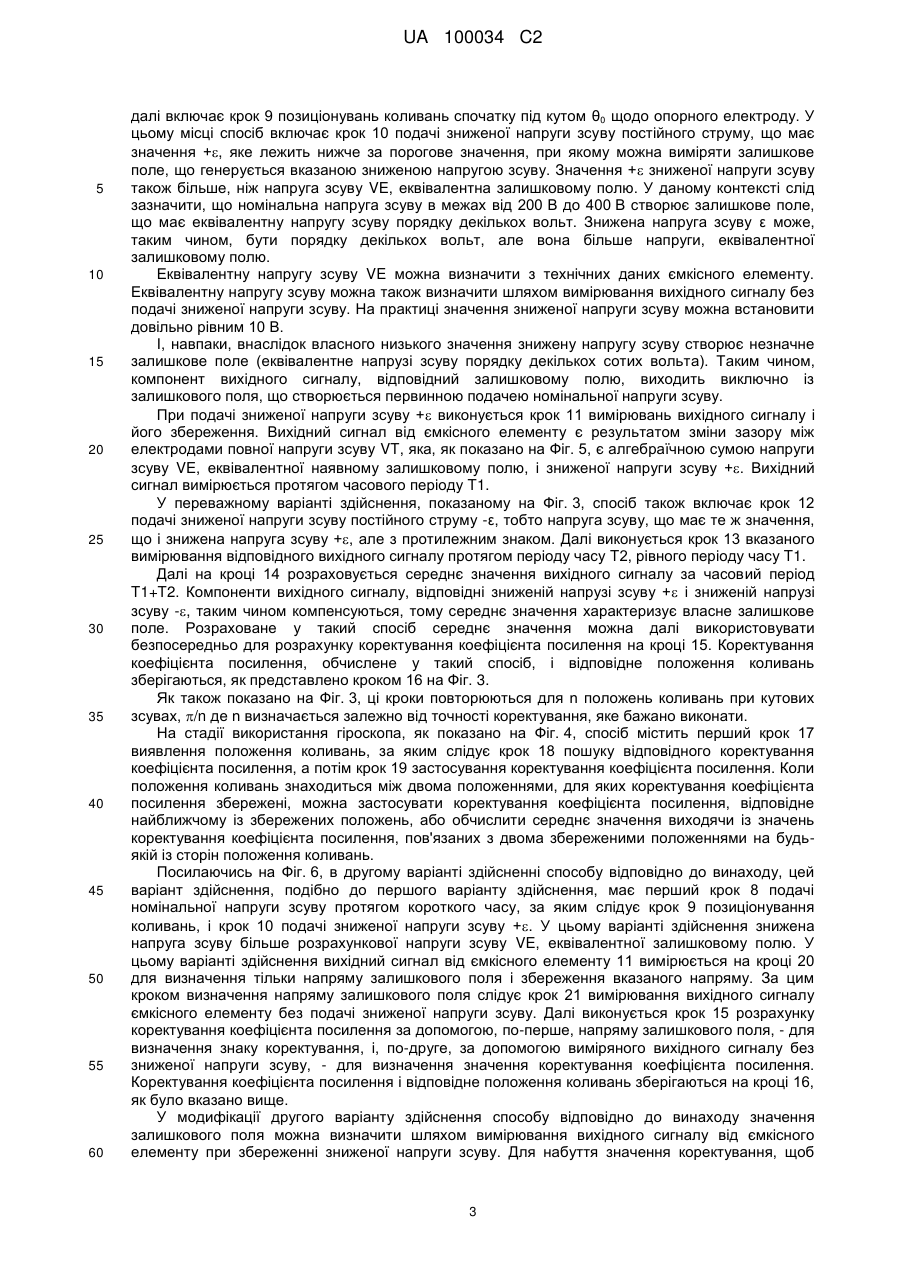
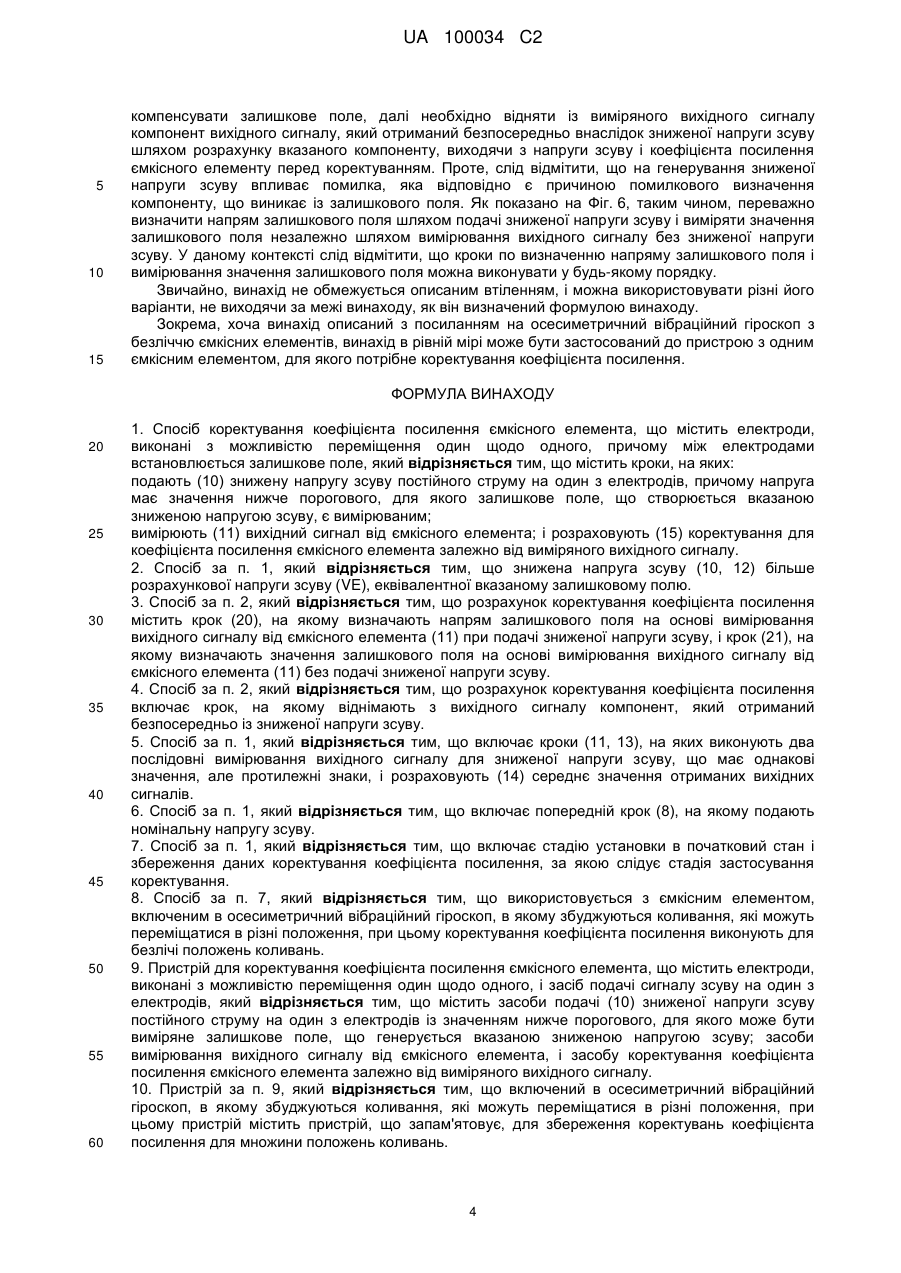
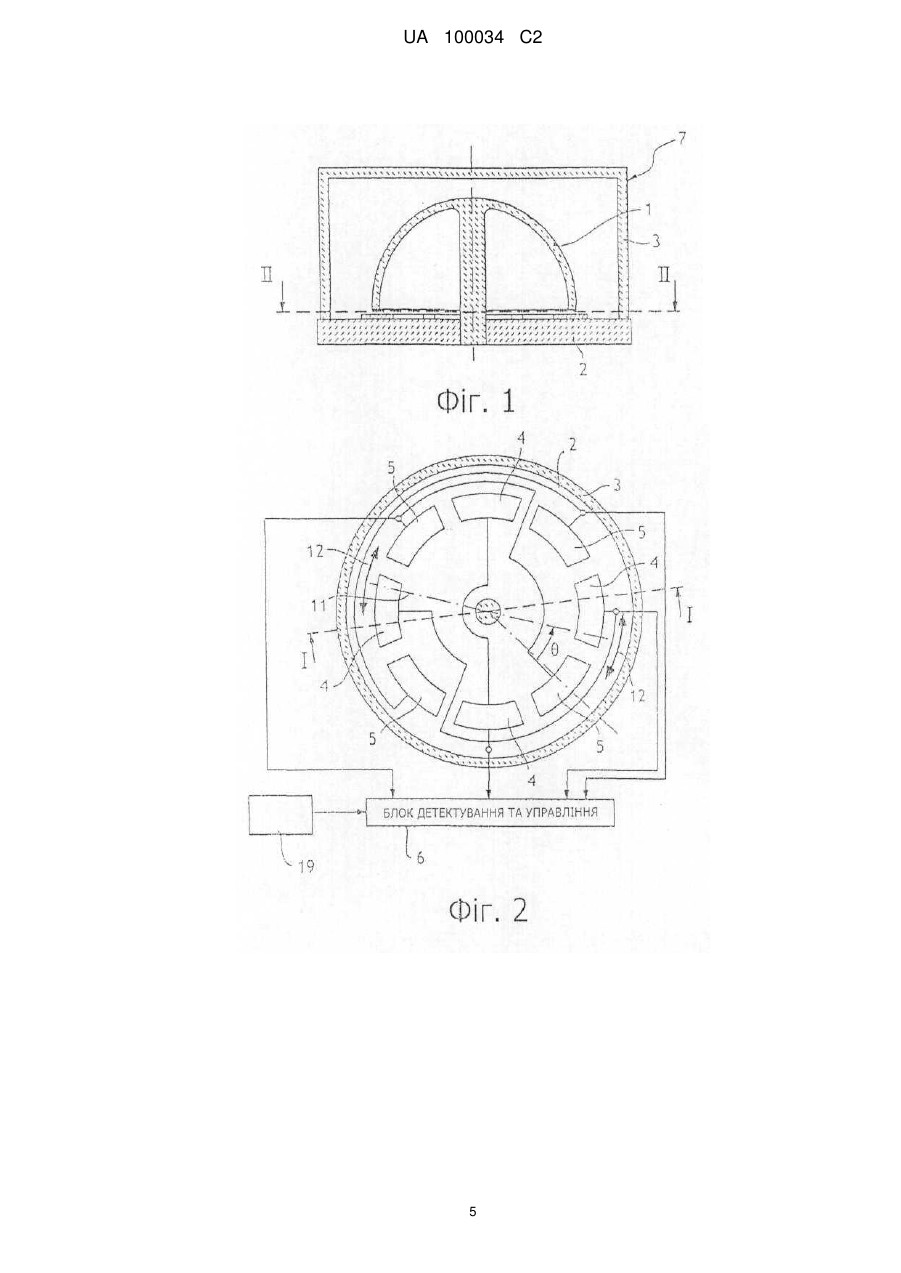
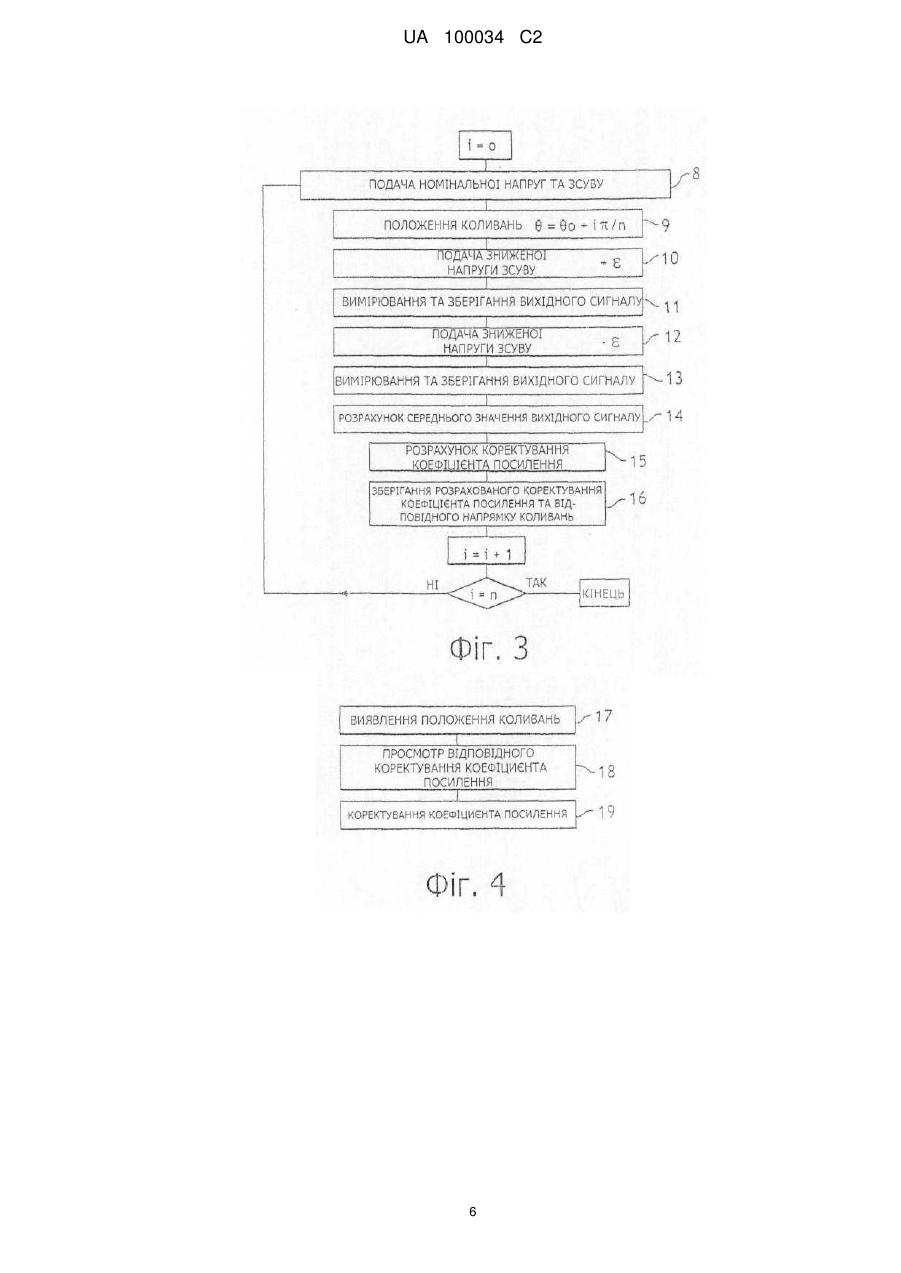
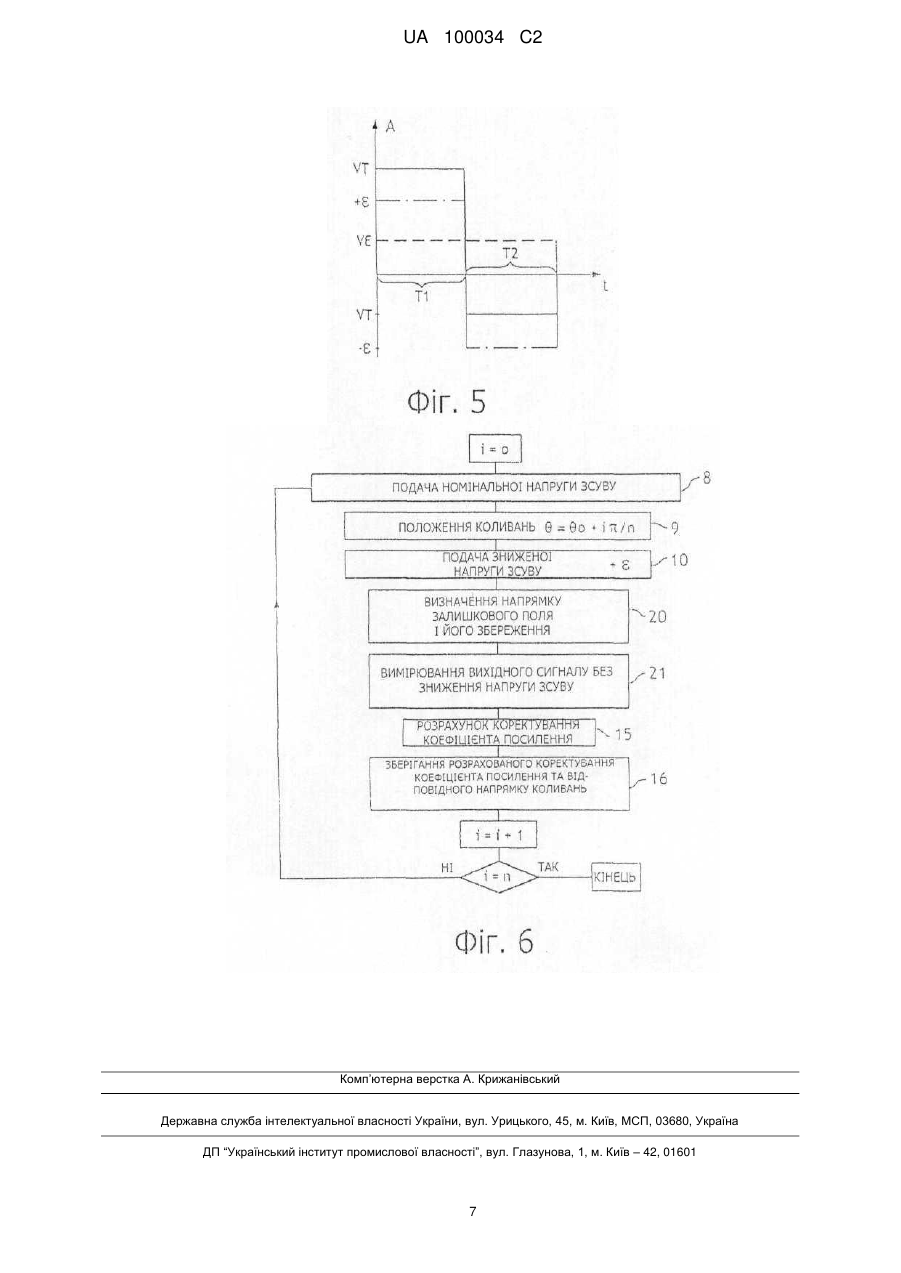
Реферат: Спосіб коректування коефіцієнта посилення ємкісного елемента, що містить електроди, переміщувані один щодо одного, містить кроки, на яких послідовно подають на один з електродів знижену напругу зсуву (10, 12). Раніш зазначені мають протилежні знаки і однакове значення, яке нижче за порогове значення, для якого може бути виміряне залишкове поле, що створюється вказаною зниженою напругою зсуву. Виконують (11, 13) відповідні вимірювання вихідних сигналів від ємкісного елемента. Розраховують (14) середнє значення та виконують коректування (19) коефіцієнта посилення ємкісного елемента залежно від виміряного вихідного сигналу. UA 100034 C2 (12) UA 100034 C2 UA 100034 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід відноситься до способу коректування коефіцієнта посилення ємкісного елементу і пристрою для здійснення такого способу. Рівень техніки Відомі різні пристрої, які включають ємкісний елемент для детектування і регулювання відстані між двома частинами пристрою, які переміщаються один щодо одного. Зокрема, відомо, що ємкісні елементи використовуються для детектування і регулювання деформації механічного резонатора у вібраційному гіроскопі, особливо в осесиметричному вібраційному гіроскопі. Коли такі пристрої використовуються в режимі вільного гіроскопа, вони забезпечують перевагу у вигляді наявності дуже стабільного коефіцієнта масштабування (коефіцієнт Брайана). У режимі вільного гіроскопа вібрація вільна, і її площина повертається щодо осі резонатора залежно від руху несучої основи. Для того, щоб скористатися перевагами даного режиму, важливо знати точне положення коливань щодо корпусу приладу для того, щоб подавати сигнали управління, які дозволяють підтримувати коливальний рух. Будь-яка помилка у вимірюванні положення коливань створює помилку у напрямі сили, що прикладається, що у свою чергу породжує паразитний відхід гіроскопа. Для корекції або обліку помилок, що виникають у вимірюваннях акселерометра, робилися численні спроби. Так, в документах US-A-2003/006783 і US-A-6 035 694 зроблені спроби зменшити помилку вимірювання, викликану паразитними ємкостями, які є практично постійними. Подібне рішення описане в документі US-A-6 035 694. Завдання винаходу Робота гіроскопа в сенсі визначення і в сенсі управління зачіпає коефіцієнт посилення ємкісного елементу, тобто відношення між відстанню між електродами ємкісного елементу і амплітудою електричного сигналу на виводах ємкісного елементу. Амплітуда сигналу на виводах ємкісного елементу при його застосуванні як детектора і відстань між електродами при його застосуванні з метою управління також залежать від напруги зсуву постійного струму (DC), що подається на один з електродів. Експерименти, які привели до даного винаходу, показали, що на коефіцієнт посилення ємкісного елементу впливає залишкове поле, яке залишається навіть після переривання подачі напруги зсуву. Вважається, що це залишкове поле виникає через сторонні домішки в об'ємі електродів або забруднень на їх поверхні, і воно створюється під дією прикладеної напруги зсуву. Коли номінальна напруга зсуву, тобто напруга, що подається на ємкісний елемент на стадії визначення або управління, складає порядку декілька сотень вольт, зазвичай в діапазоні від 200 В до 400 В, результуюче залишкове поле еквівалентне напрузі зсуву в декілька вольт. Це залишкове поле може створювати відхилення коефіцієнта посилення, яке повільно змінюється. Завданням даного винаходу є пропозиція способу і пристрою, що забезпечують усунення ефектів залишкового поля. Розкриття винаходу Для вирішення вказаного завдання відповідно до винаходу запропонований спосіб коректування коефіцієнта посилення ємкісного елементу, що містить електроди, які переміщаються один щодо одного і між якими встановлюється залишкове поле, спосіб містить кроки, на яких: подають на один з електродів знижену напругу зсуву постійного струму, що має значення нижче порогового значення, для якого може бути виміряне залишкове поле, яке створюється вказаною зниженою напругою зсуву; вимірюють вихідний сигнал від ємкісного елементу; і коректують коефіцієнт посилення ємкісного елементу залежно від функції виміряного вихідного сигналу. Вихідний сигнал від ємкісного елементу тоді містить два компоненти, які складаються: перший компонент виникає внаслідок напруги зсуву, еквівалентної наявному залишковому полю, і другий компонент, який виникає безпосередньо внаслідок зниженої напруги зсуву. Компонент вихідного сигналу, що виникає безпосередньо із зниженої напруги зсуву, можна розрахувати на підставі вказаної напруги зсуву і коефіцієнта посилення ємкісного елементу перед коректуванням. Цей компонент вихідного сигналу, який виникає внаслідок залишкового поля, можна, таким чином, отримати з вихідного сигналу. Цей компонент дозволяє розрахувати відхилення коефіцієнта посилення, викликане залишковим полем при використанні ємкісного елементу для роботи пристрою, з яким він пов'язаний. У переважному варіанті даного винаходу знижена напруга зсуву більша, ніж розрахункова напруга зсуву, еквівалентна залишковому полю. Таким чином, вихідний сигнал від ємкісного елементу має знак, який є постійним незалежно від напряму залишкового поля, і абсолютне 1 UA 100034 C2 5 10 15 20 25 30 35 40 45 50 55 60 значення вихідного сигналу тоді робить можливим визначення напряму залишкового поля залежно від того, більше або менше вказане абсолютне значення, ніж амплітуда зниженої напруги зсуву. Переважно спосіб включає кроки по виконанню двох послідовних вимірювань вихідного сигналу від зниженої напруги зсуву, що має однакове значення, але протилежні знаки, і обчислення середнього значення результуючих вихідних сигналів. В результаті забираються компоненти з вихідного сигналу, зсуви, що виникають внаслідок зниженої напруги, роблячи, таким чином, можливим використання середнього значення вихідних сигналів ємкісного елементу для коректування коефіцієнта посилення без необхідності обліку амплітуди сигналів зниженої напруги зсуву. У переважному варіанті здійснення способу відповідно до винаходу виконують попередній крок, на якому подають номінальний сигнал зсуву на ємкісній елемент протягом короткого періоду часу. В результаті залишкове поле, виміряне при здійсненні способу коректування коефіцієнта посилення, має значення, ідентичне своєму значенню під час роботи пристрою, з яким пов'язаний ємкісною елемент. Короткий опис креслень Інші характеристики і переваги даного винаходу будуть зрозумілі з прочитання наступного опису не обмежувального варіанту здійснення винаходу, представленого з посиланням на креслення, що додаються, на яких: Фіг. 1 - схематичний вид осьового перетину по лінії I-I Фіг. 2, що представляє вібродатчик з півсферичним куполом; Фіг. 2 - перетин по лінії II-II Фіг. 1; Фіг. 3 - блок-схема, яка ілюструє здійснення способу даного винаходу на стадії установки в початковий стан; Фіг. 4 - блок-схема, яка ілюструє перший варіант здійснення способу відповідно до винаходу на стадії роботи пристрою, з яким пов'язаний ємкісний елемент; Фіг. 5 - діаграма, яка представляє амплітуду напруги зсуву, еквівалентної залишковому полю, знижену напругу зсуву і загальну еквівалентну напругу, отриману для двох знижених напруг зсуву з однаковими значеннями і протилежними знаками; і Фіг. 6 - блок-схема, яка ілюструє другий варіант здійснення способу відповідно до винаходу на стадії роботи пристрою, з яким пов'язаний ємкісний елемент. Здійснення винаходу З посиланням на Фіг. 1 і 2 даний винахід ілюстрований відносно вібродатчика 7 з півсферичним куполом, що містить звичайний кремнієвий купол 1, встановлений на основі 2, яка також виготовлена з кремнію, купол 1 оточений газонепроникним корпусом 3, який дозволяє підтримувати в датчику вакуум. Також відомим способом внутрішня поверхня куполу 1, як і його нижній край, покрита металом, і нижній край проходить напроти двох пар керуючих електродів 4 і двох пар детектуючих електродів 5. Покритий металом нижній край куполу 1 утворює з кожним з протистоячих електродів відповідні ємкісні елементи, відповідним чином сполучені з блоком 6 детектувань управління для генерації коливань відносно площини, яка проходить через вісь півсферичного куполу і положення, визначуване кутом щодо опорного електроду 5. Положення коливань регулюється блоком 6 управлінь шляхом подачі сигналу управління прецесією на керуючі електроди 4. Залишкове поле, яке виникає в результаті подачі напруги зсуву постійного струму на металевий шар куполу 1, змінюється не тільки залежно від часу і температури, але також і залежно від орієнтації площини коливань. Для виконання уточненої корекції коефіцієнта посилення кожного ємкісного елементу спосіб відповідно до винаходу переважно включає стадію установки в початковий стан, яка виконується на періодичній основі, причому період залежить від тривалості збереження залишкового поля після переривання подачі номінальної напруги зсуву. Цей час збереження залишкового поля може складати від декількох годин до декількох днів.Потім виконується стадія внесення коректування із застосуванням пристрою, з яким пов'язаний ємкісний елемент. Стадія установки в початковий стан переважно виконується безпосередньо перед стадією внесення коректування, наприклад, безпосередньо перед зльотом літака, на якому встановлений вібродатчик. На Фіг. 3 показано переважне здійснення стадії установки в початковий стан. У даному переважному варіанті здійснення спосіб містить крок 8 подачі номінальної напруги зсуву протягом короткого періоду, тобто напруга зсуву, яка подається при використанні гіроскопа. У найзвичайніших умовах номінальна напруга зсуву лежить в діапазоні від 200 В до 400 В. Спосіб 2 UA 100034 C2 5 10 15 20 25 30 35 40 45 50 55 60 далі включає крок 9 позиціонувань коливань спочатку під кутом θ0 щодо опорного електроду. У цьому місці спосіб включає крок 10 подачі зниженої напруги зсуву постійного струму, що має значення +, яке лежить нижче за порогове значення, при якому можна виміряти залишкове поле, що генерується вказаною зниженою напругою зсуву. Значення + зниженої напруги зсуву також більше, ніж напруга зсуву VE, еквівалентна залишковому полю. У даному контексті слід зазначити, що номінальна напруга зсуву в межах від 200 В до 400 В створює залишкове поле, що має еквівалентну напругу зсуву порядку декількох вольт. Знижена напруга зсуву ε може, таким чином, бути порядку декількох вольт, але вона більше напруги, еквівалентної залишковому полю. Еквівалентну напругу зсуву VE можна визначити з технічних даних ємкісного елементу. Еквівалентну напругу зсуву можна також визначити шляхом вимірювання вихідного сигналу без подачі зниженої напруги зсуву. На практиці значення зниженої напруги зсуву можна встановити довільно рівним 10 В. І, навпаки, внаслідок власного низького значення знижену напругу зсуву створює незначне залишкове поле (еквівалентне напрузі зсуву порядку декількох сотих вольта). Таким чином, компонент вихідного сигналу, відповідний залишковому полю, виходить виключно із залишкового поля, що створюється первинною подачею номінальної напруги зсуву. При подачі зниженої напруги зсуву + виконується крок 11 вимірювань вихідного сигналу і його збереження. Вихідний сигнал від ємкісного елементу є результатом зміни зазору між електродами повної напруги зсуву VT, яка, як показано на Фіг. 5, є алгебраїчною сумою напруги зсуву VE, еквівалентної наявному залишковому полю, і зниженої напруги зсуву +. Вихідний сигнал вимірюється протягом часового періоду T1. У переважному варіанті здійснення, показаному на Фіг. 3, спосіб також включає крок 12 подачі зниженої напруги зсуву постійного струму -ε, тобто напруга зсуву, що має те ж значення, що і знижена напруга зсуву +, але з протилежним знаком. Далі виконується крок 13 вказаного вимірювання відповідного вихідного сигналу протягом періоду часу T2, рівного періоду часу T1. Далі на кроці 14 розраховується середнє значення вихідного сигналу за часовий період T1+T2. Компоненти вихідного сигналу, відповідні зниженій напрузі зсуву + і зниженій напрузі зсуву -, таким чином компенсуються, тому середнє значення характеризує власне залишкове поле. Розраховане у такий спосіб середнє значення можна далі використовувати безпосередньо для розрахунку коректування коефіцієнта посилення на кроці 15. Коректування коефіцієнта посилення, обчислене у такий спосіб, і відповідне положення коливань зберігаються, як представлено кроком 16 на Фіг. 3. Як також показано на Фіг. 3, ці кроки повторюються для n положень коливань при кутових зсувах, /n де n визначається залежно від точності коректування, яке бажано виконати. На стадії використання гіроскопа, як показано на Фіг. 4, спосіб містить перший крок 17 виявлення положення коливань, за яким слідує крок 18 пошуку відповідного коректування коефіцієнта посилення, а потім крок 19 застосування коректування коефіцієнта посилення. Коли положення коливань знаходиться між двома положеннями, для яких коректування коефіцієнта посилення збережені, можна застосувати коректування коефіцієнта посилення, відповідне найближчому із збережених положень, або обчислити середнє значення виходячи із значень коректування коефіцієнта посилення, пов'язаних з двома збереженими положеннями на будьякій із сторін положення коливань. Посилаючись на Фіг. 6, в другому варіанті здійсненні способу відповідно до винаходу, цей варіант здійснення, подібно до першого варіанту здійснення, має перший крок 8 подачі номінальної напруги зсуву протягом короткого часу, за яким слідує крок 9 позиціонування коливань, і крок 10 подачі зниженої напруги зсуву +. У цьому варіанті здійснення знижена напруга зсуву більше розрахункової напруги зсуву VE, еквівалентної залишковому полю. У цьому варіанті здійснення вихідний сигнал від ємкісного елементу 11 вимірюється на кроці 20 для визначення тільки напряму залишкового поля і збереження вказаного напряму. За цим кроком визначення напряму залишкового поля слідує крок 21 вимірювання вихідного сигналу ємкісного елементу без подачі зниженої напруги зсуву. Далі виконується крок 15 розрахунку коректування коефіцієнта посилення за допомогою, по-перше, напряму залишкового поля, - для визначення знаку коректування, і, по-друге, за допомогою виміряного вихідного сигналу без зниженої напруги зсуву, - для визначення значення коректування коефіцієнта посилення. Коректування коефіцієнта посилення і відповідне положення коливань зберігаються на кроці 16, як було вказано вище. У модифікації другого варіанту здійснення способу відповідно до винаходу значення залишкового поля можна визначити шляхом вимірювання вихідного сигналу від ємкісного елементу при збереженні зниженої напруги зсуву. Для набуття значення коректування, щоб 3 UA 100034 C2 5 10 15 компенсувати залишкове поле, далі необхідно відняти із виміряного вихідного сигналу компонент вихідного сигналу, який отриманий безпосередньо внаслідок зниженої напруги зсуву шляхом розрахунку вказаного компоненту, виходячи з напруги зсуву і коефіцієнта посилення ємкісного елементу перед коректуванням. Проте, слід відмітити, що на генерування зниженої напруги зсуву впливає помилка, яка відповідно є причиною помилкового визначення компоненту, що виникає із залишкового поля. Як показано на Фіг. 6, таким чином, переважно визначити напрям залишкового поля шляхом подачі зниженої напруги зсуву і виміряти значення залишкового поля незалежно шляхом вимірювання вихідного сигналу без зниженої напруги зсуву. У даному контексті слід відмітити, що кроки по визначенню напряму залишкового поля і вимірювання значення залишкового поля можна виконувати у будь-якому порядку. Звичайно, винахід не обмежується описаним втіленням, і можна використовувати різні його варіанти, не виходячи за межі винаходу, як він визначений формулою винаходу. Зокрема, хоча винахід описаний з посиланням на осесиметричний вібраційний гіроскоп з безліччю ємкісних елементів, винахід в рівній мірі може бути застосований до пристрою з одним ємкісним елементом, для якого потрібне коректування коефіцієнта посилення. ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Спосіб коректування коефіцієнта посилення ємкісного елемента, що містить електроди, виконані з можливістю переміщення один щодо одного, причому між електродами встановлюється залишкове поле, який відрізняється тим, що містить кроки, на яких: подають (10) знижену напругу зсуву постійного струму на один з електродів, причому напруга має значення нижче порогового, для якого залишкове поле, що створюється вказаною зниженою напругою зсуву, є вимірюваним; вимірюють (11) вихідний сигнал від ємкісного елемента; і розраховують (15) коректування для коефіцієнта посилення ємкісного елемента залежно від виміряного вихідного сигналу. 2. Спосіб за п. 1, який відрізняється тим, що знижена напруга зсуву (10, 12) більше розрахункової напруги зсуву (VE), еквівалентної вказаному залишковому полю. 3. Спосіб за п. 2, який відрізняється тим, що розрахунок коректування коефіцієнта посилення містить крок (20), на якому визначають напрям залишкового поля на основі вимірювання вихідного сигналу від ємкісного елемента (11) при подачі зниженої напруги зсуву, і крок (21), на якому визначають значення залишкового поля на основі вимірювання вихідного сигналу від ємкісного елемента (11) без подачі зниженої напруги зсуву. 4. Спосіб за п. 2, який відрізняється тим, що розрахунок коректування коефіцієнта посилення включає крок, на якому віднімають з вихідного сигналу компонент, який отриманий безпосередньо із зниженої напруги зсуву. 5. Спосіб за п. 1, який відрізняється тим, що включає кроки (11, 13), на яких виконують два послідовні вимірювання вихідного сигналу для зниженої напруги зсуву, що має однакові значення, але протилежні знаки, і розраховують (14) середнє значення отриманих вихідних сигналів. 6. Спосіб за п. 1, який відрізняється тим, що включає попередній крок (8), на якому подають номінальну напругу зсуву. 7. Спосіб за п. 1, який відрізняється тим, що включає стадію установки в початковий стан і збереження даних коректування коефіцієнта посилення, за якою слідує стадія застосування коректування. 8. Спосіб за п. 7, який відрізняється тим, що використовується з ємкісним елементом, включеним в осесиметричний вібраційний гіроскоп, в якому збуджуються коливання, які можуть переміщатися в різні положення, при цьому коректування коефіцієнта посилення виконують для безлічі положень коливань. 9. Пристрій для коректування коефіцієнта посилення ємкісного елемента, що містить електроди, виконані з можливістю переміщення один щодо одного, і засіб подачі сигналу зсуву на один з електродів, який відрізняється тим, що містить засоби подачі (10) зниженої напруги зсуву постійного струму на один з електродів із значенням нижче порогового, для якого може бути виміряне залишкове поле, що генерується вказаною зниженою напругою зсуву; засоби вимірювання вихідного сигналу від ємкісного елемента, і засобу коректування коефіцієнта посилення ємкісного елемента залежно від виміряного вихідного сигналу. 10. Пристрій за п. 9, який відрізняється тим, що включений в осесиметричний вібраційний гіроскоп, в якому збуджуються коливання, які можуть переміщатися в різні положення, при цьому пристрій містить пристрій, що запам'ятовує, для збереження коректувань коефіцієнта посилення для множини положень коливань. 4 UA 100034 C2 5 UA 100034 C2 6 UA 100034 C2 Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of correcting the gain of a capacitive member, and a device for implementing the method
Автори англійськоюCaron, Jean-Michel, Ragot, Vincent
Назва патенту російськоюСпособ корректировки коэффициента усиления емкостного элемента и устройство для его осуществления
Автори російськоюКарон Жан-Мишель, Раго Венсан
МПК / Мітки
МПК: G01P 15/13, G01C 19/56
Мітки: коректування, посилення, спосіб, коефіцієнта, здійснення, елемента, ємкісного, пристрій
Код посилання
<a href="https://ua.patents.su/9-100034-sposib-korektuvannya-koeficiehnta-posilennya-ehmkisnogo-elementa-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб коректування коефіцієнта посилення ємкісного елемента та пристрій для його здійснення</a>
Спосіб коректування всередині визначеного діапазону коректування коефіцієнта трансформації, пристрій перемикання для його здійснення та трансформатор з таким пристроєм перемикання
Номер патенту: 41458
Опубліковано: 17.09.2001
Автори: Бауер Павол, Гріффіун Ян Хендрік, Асселман Паулус Герардус Йоханнес Марія, Пап Герардус Хрістоффел, ван де Ватер Корнеліс Йосефус, де Хан Сюрд Валтер Херо
МПК: G05F 1/20
Мітки: таким, пристроєм, трансформатор, діапазону, визначеного, коректування, спосіб, коефіцієнта, пристрій, трансформації, здійснення, перемикання
Формула / Реферат:
1. Спосіб коректування всередині визначеного діапазону коректування трансформації між первинною та вторинною обмотками силового трансформатора, який містить, принаймні, одну обмотку регулювання з відводами, при якому застосовують пристрій перемикання, який відрізняється тим, що перший відвід обмотки регулювання трансформатора підключають на час першої частини періоду змінної напруги трансформатора, а другий відвід підключають на час другої...
Спосіб формування коефіцієнта підсилення та пристрій для його здійснення
Номер патенту: 81087
Опубліковано: 26.11.2007
Автори: Федотов Дмитро Олексійович, Сліпченко Микола Іванович, Федотов Павло Дмитрович
Мітки: пристрій, формування, підсилення, коефіцієнта, спосіб, здійснення
Формула / Реферат:
1. Спосіб формування коефіцієнта підсилення, при якому отримують диференційну напругу як різницю вхідного сигналу та напруги зворотного зв’язку, підсилюють цю диференційну напругу за допомогою першого операційного підсилювача з нескінченно великим коефіцієнтом підсилення та одержують вихідний сигнал, який відрізняється тим, що додатково вихідний сигнал підсилюють безпосередньо та з інверсією за допомогою другого та третього операційних...
Спосіб формування коефіцієнта підсилення напруги та пристрій для його здійснення
Номер патенту: 91798
Опубліковано: 25.08.2010
Автори: Сліпченко Микола Іванович, Федотов Дмитро Олексійович, Федотов Павло Дмитрович
МПК: H03G 3/00
Мітки: напруги, спосіб, формування, підсилення, здійснення, пристрій, коефіцієнта
Формула / Реферат:
1. Спосіб формування коефіцієнта підсилення напруги, який полягає у тому, що з коефіцієнтом каналу прямої передачі КПП перетворюють вхідний сигнал у каналі прямої передачі та формують вихідну напругу, а коефіцієнтом каналу зворотного зв'язку КЗЗ вводять обмеження у каналі зворотного зв'язку, який відрізняється тим, що додатково до вихідної напруги у фазі або протифазі додають напругу вхідного сигналу, одержану сумарну напругу у каналі...
Спосіб формування коефіцієнта підсилення та пристрій для його здійснення
Номер патенту: 93015
Опубліковано: 27.12.2010
Автори: Сліпченко Микола Іванович, Федотов Дмитро Олексійович, Федотов Павло Дмитрович
МПК: H03G 3/00
Мітки: здійснення, коефіцієнта, спосіб, пристрій, формування, підсилення
Формула / Реферат:
1 Спосіб формування коефіцієнта підсилення, який полягає у тому, що із вхідної напруги та сигналу зворотного зв'язку формують диференційну напругу, яку підсилюють з коефіцієнтом у каналі прямої передачі, отримують вихідну напругу, яку перетворюють з коефіцієнтом у сигнал зворотного звя'зку, який...
Контактне ущільнення циліндричного охоплюваного елемента ємкісного апарата
Номер патенту: 53247
Опубліковано: 27.09.2010
Автори: Зубрій Олег Григорович, Мікульонок Ігор Олегович, Ганський Андрій Едуардович
Мітки: апарата, елемента, охоплюваного, циліндричного, ущільнення, ємкісного, контактне
Формула / Реферат:
1. Контактне ущільнення циліндричного охоплюваного елемента ємкісного апарата, що містить опуклу пружну оболонку обертання, одна кінцева ділянка якої щільно закріплена на охоплюваному елементі, а друга виконана з можливістю переміщення відносно нього, при цьому середня ділянка зазначеної оболонки виконана з можливістю контакту з охоплювальним елементом, яке відрізняється тим, що кінцева ділянка опуклої пружної оболонки обертання, яка щільно...
Попередній патент: Пристрій та спосіб обробки даних, кодувальний пристрій та спосіб кодування
Наступний патент: Заміщені ефіри 4-{3-[6-аміно-9-(3,4-дигідрокситетрагідрофуран-2-іл)-9н-пурин-2-іл]-проп-2-ініл}-піперидин-1-карбонової кислоти як a2ar агоністи
Випадковий патент: Вітрогенератор