Спосіб комплексної обробки навігаційної інформації
Номер патенту: 102436
Опубліковано: 10.07.2013
Автори: Захарін Фелікс Михайлович, Войтюк Дмитро Григорович, Аніскевич Леонід Володимирович

Формула / Реферат
Спосіб комплексної обробки навігаційної інформації, що передбачає обчислення координат місцезнаходження центра мас рухомої машини наземного базування в вибраній системі координат за інформацією від курсо-швидкісної навігаційної системи (КШНС), до складу якої входять датчики кута курсу та шляхової швидкості, і проведення корекції розрахованих координат з використанням поточної позиційно-швидкісної інформації від бортової диференціальної супутникової навігаційної системи (ДСНС), який відрізняється тим, що на кожному дискретному кроці обробки навігаційної інформації з періодом, що дорівнює часу оновлення інформації від ДСНС, за допомогою нелінійної регресійної ітераційної процедури оцінюють поправки до показань датчика курсу та масштабного коефіцієнта датчика шляхової швидкості і отримують оцінки поточних координат положення центра мас та уточнені оцінки поправок до показань датчиків курсу і швидкості за допомогою узагальненого дискретного фільтра, в якому операція корекції оцінок координат центра мас і поправок до показань датчиків виконується тільки при наявності поточної позиційно-швидкісної інформації від ДСНС, а операція екстраполяції оцінок координат виконується на кожному кроці обробки за допомогою формул для курсо-швидкісного обчислення координат з урахуванням поточних оцінок поправок до показань датчиків курсу і шляхової швидкості.
Текст
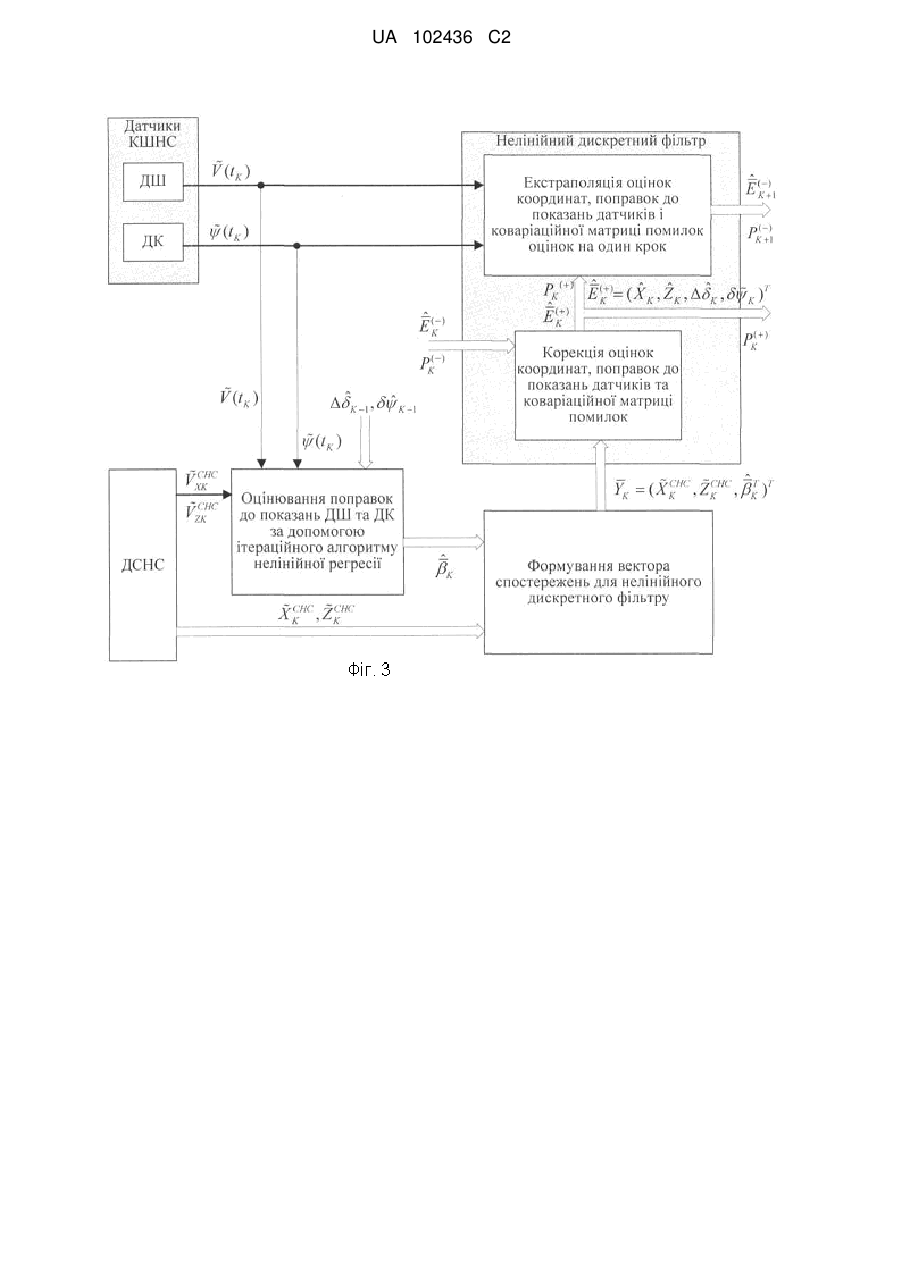
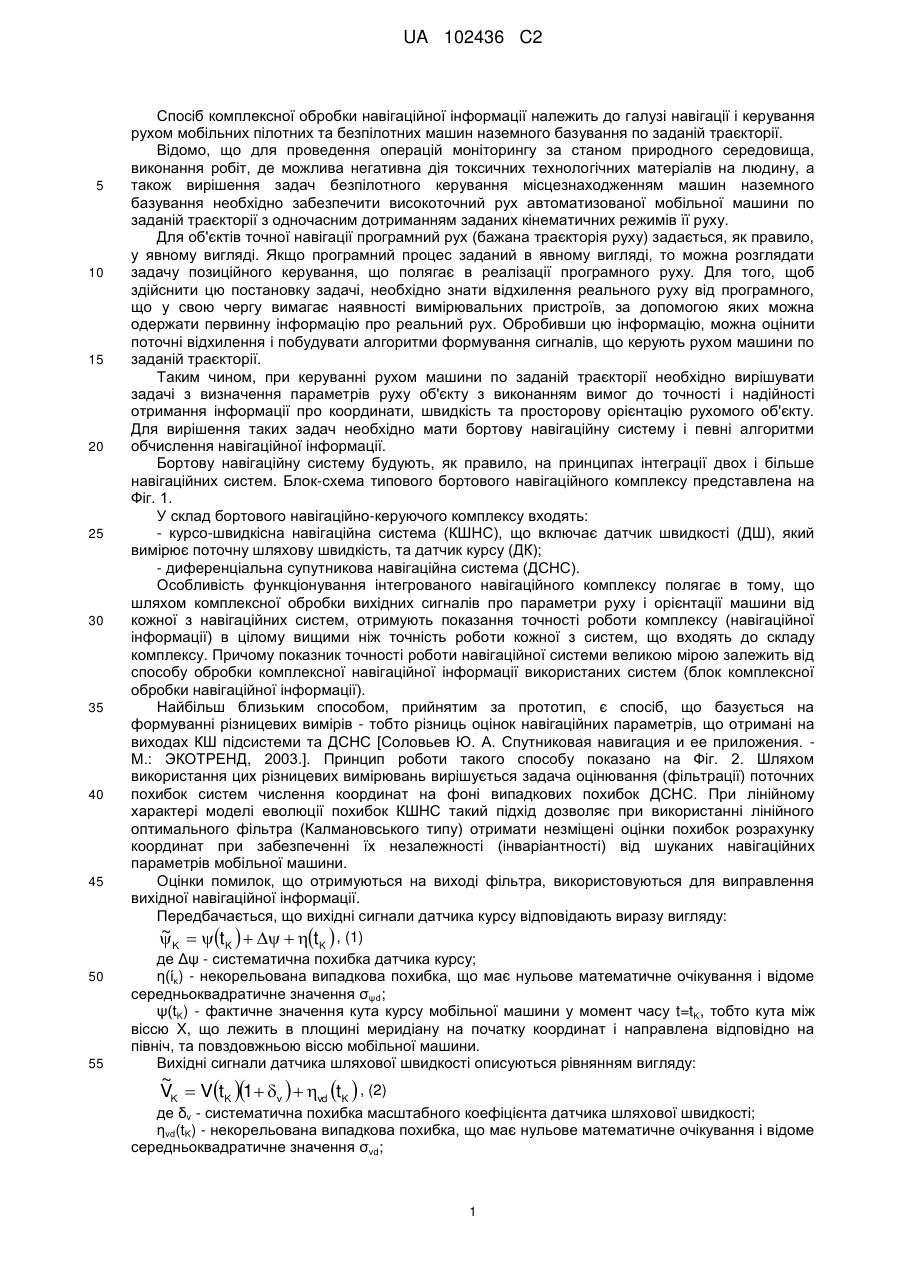
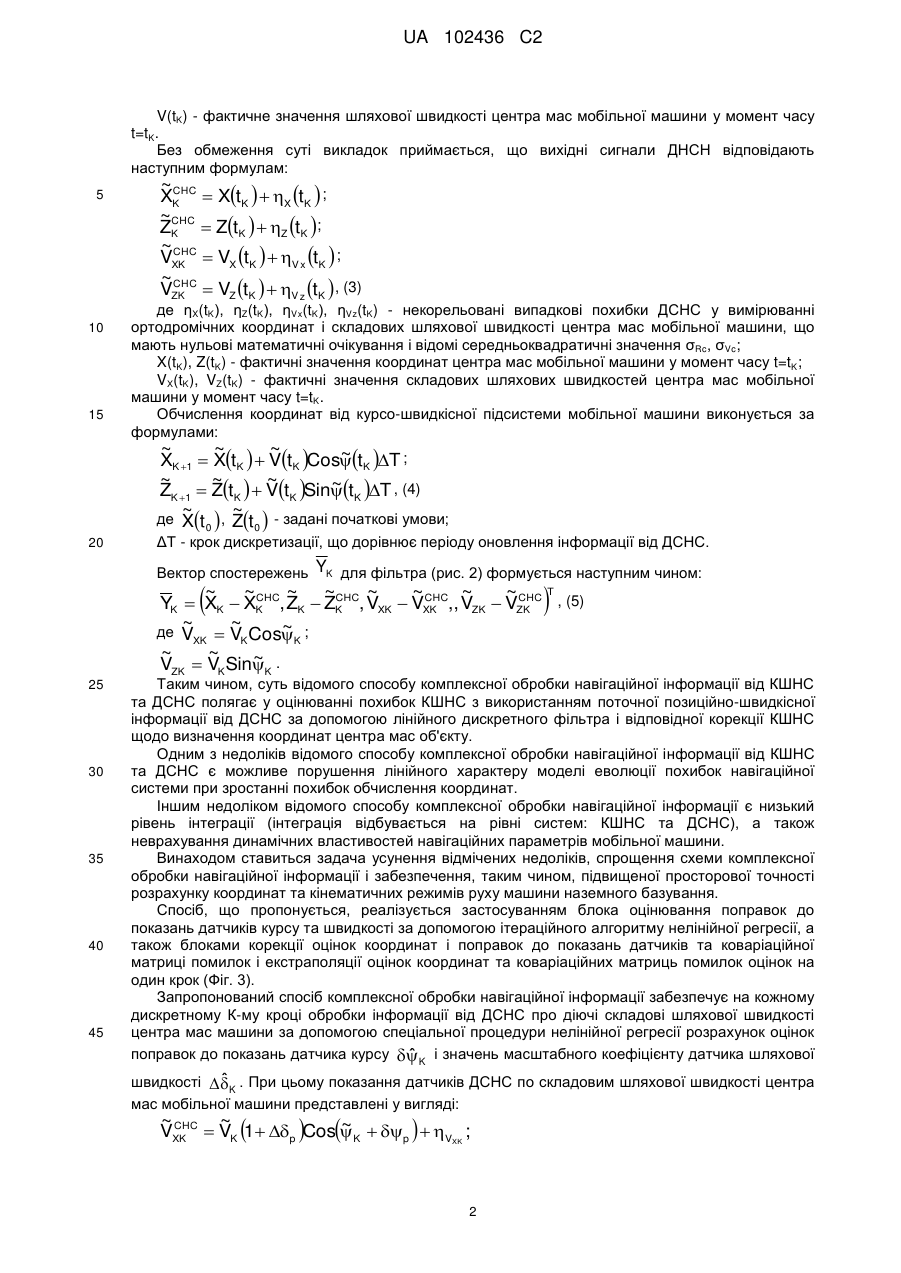
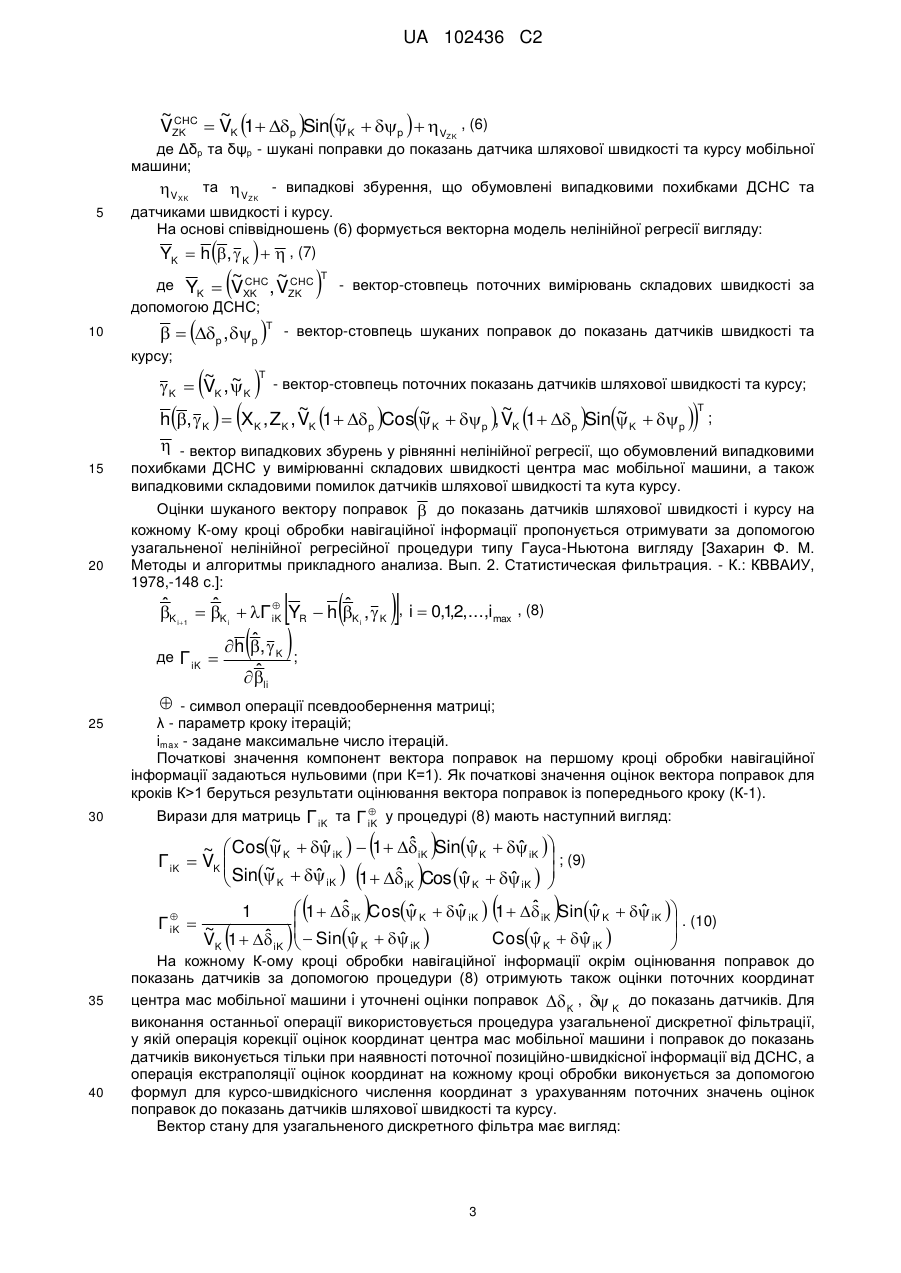
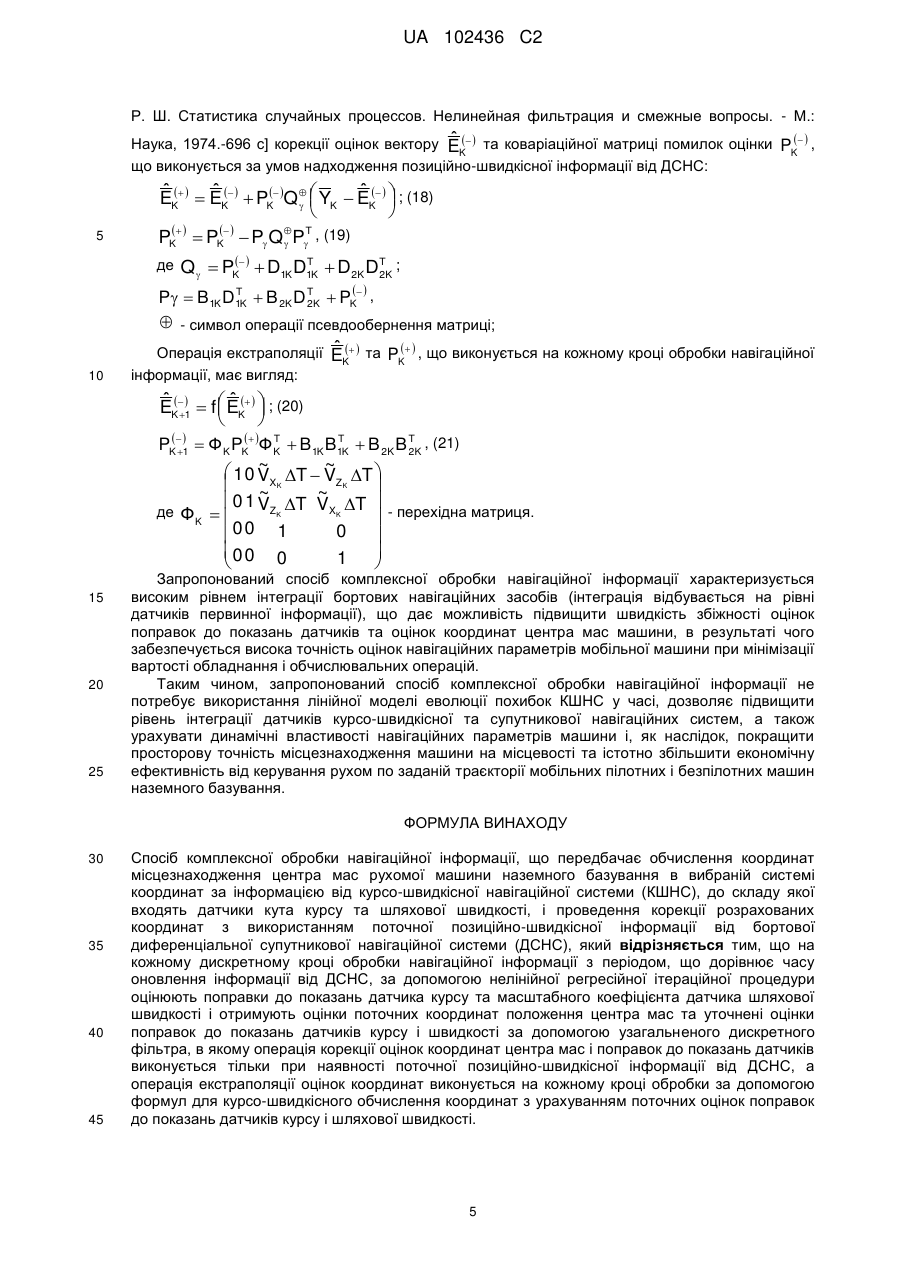
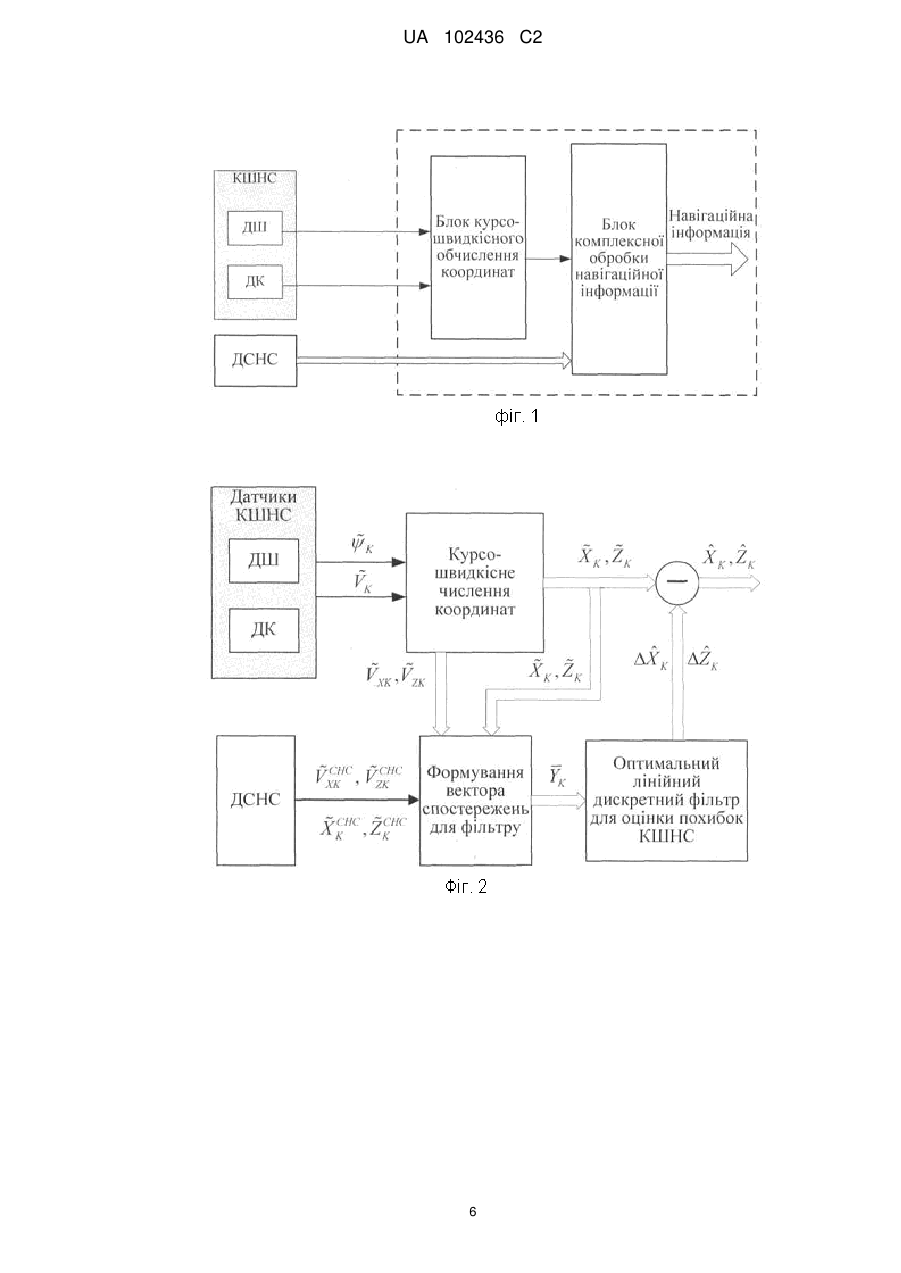
Реферат: Спосіб комплексної обробки навігаційної інформації належить до галузі навігації і керування рухом мобільних пілотних та безпілотних машин наземного базування по заданій траєкторії. Запропоновано спосіб комплексної обробки навігаційної інформації від курсо-швидкісної та супутникової навігаційних систем рухомої машини наземного базування, що передбачає оцінювання поправок до показань датчиків курсу та швидкості за допомогою ітераційного алгоритму нелінійної регресії, а також оцінювання координат центра мас і уточнення оцінок поправок до показань датчиків з використанням узагальненого дискретного фільтра. Технічний результат полягає в підвищенні ступеня інтеграції курсо-швидкісної та супутникової навігаційних систем на рівні датчиків та урахування динамічних властивостей навігаційних параметрів мобільної машини і, як наслідок, значне покращення просторової точності визначення координат машини на місцевості, а значить істотне збільшення економічної ефективності від керування рухом по заданій траєкторії мобільних пілотних та безпілотних машин наземного базування. UA 102436 C2 (12) UA 102436 C2 UA 102436 C2 5 10 15 20 25 30 35 40 45 Спосіб комплексної обробки навігаційної інформації належить до галузі навігації і керування рухом мобільних пілотних та безпілотних машин наземного базування по заданій траєкторії. Відомо, що для проведення операцій моніторингу за станом природного середовища, виконання робіт, де можлива негативна дія токсичних технологічних матеріалів на людину, а також вирішення задач безпілотного керування місцезнаходженням машин наземного базування необхідно забезпечити високоточний рух автоматизованої мобільної машини по заданій траєкторії з одночасним дотриманням заданих кінематичних режимів її руху. Для об'єктів точної навігації програмний рух (бажана траєкторія руху) задається, як правило, у явному вигляді. Якщо програмний процес заданий в явному вигляді, то можна розглядати задачу позиційного керування, що полягає в реалізації програмного руху. Для того, щоб здійснити цю постановку задачі, необхідно знати відхилення реального руху від програмного, що у свою чергу вимагає наявності вимірювальних пристроїв, за допомогою яких можна одержати первинну інформацію про реальний рух. Обробивши цю інформацію, можна оцінити поточні відхилення і побудувати алгоритми формування сигналів, що керують рухом машини по заданій траєкторії. Таким чином, при керуванні рухом машини по заданій траєкторії необхідно вирішувати задачі з визначення параметрів руху об'єкту з виконанням вимог до точності і надійності отримання інформації про координати, швидкість та просторову орієнтацію рухомого об'єкту. Для вирішення таких задач необхідно мати бортову навігаційну систему і певні алгоритми обчислення навігаційної інформації. Бортову навігаційну систему будують, як правило, на принципах інтеграції двох і більше навігаційних систем. Блок-схема типового бортового навігаційного комплексу представлена на Фіг. 1. У склад бортового навігаційно-керуючого комплексу входять: - курсо-швидкісна навігаційна система (КШНС), що включає датчик швидкості (ДШ), який вимірює поточну шляхову швидкість, та датчик курсу (ДК); - диференціальна супутникова навігаційна система (ДСНС). Особливість функціонування інтегрованого навігаційного комплексу полягає в тому, що шляхом комплексної обробки вихідних сигналів про параметри руху і орієнтації машини від кожної з навігаційних систем, отримують показання точності роботи комплексу (навігаційної інформації) в цілому вищими ніж точність роботи кожної з систем, що входять до складу комплексу. Причому показник точності роботи навігаційної системи великою мірою залежить від способу обробки комплексної навігаційної інформації використаних систем (блок комплексної обробки навігаційної інформації). Найбільш близьким способом, прийнятим за прототип, є спосіб, що базується на формуванні різницевих вимірів - тобто різниць оцінок навігаційних параметрів, що отримані на виходах КШ підсистеми та ДСНС [Соловьев Ю. А. Спутниковая навигация и ее приложения. Μ.: ЭКОТРЕНД, 2003.]. Принцип роботи такого способу показано на Фіг. 2. Шляхом використання цих різницевих вимірювань вирішується задача оцінювання (фільтрації) поточних похибок систем числення координат на фоні випадкових похибок ДСНС. При лінійному характері моделі еволюції похибок КШНС такий підхід дозволяє при використанні лінійного оптимального фільтра (Калмановського типу) отримати незміщені оцінки похибок розрахунку координат при забезпеченні їх незалежності (інваріантності) від шуканих навігаційних параметрів мобільної машини. Оцінки помилок, що отримуються на виході фільтра, використовуються для виправлення вихідної навігаційної інформації. Передбачається, що вихідні сигнали датчика курсу відповідають виразу вигляду: ~ K tK tK , (1) де Δψ - систематична похибка датчика курсу; η(ίκ) - некорельована випадкова похибка, що має нульове математичне очікування і відоме середньоквадратичне значення σψd; ψ(tK) - фактичне значення кута курсу мобільної машини у момент часу t=tK, тобто кута між віссю X, що лежить в площині меридіану на початку координат і направлена відповідно на північ, та повздовжньою віссю мобільної машини. Вихідні сигнали датчика шляхової швидкості описуються рівнянням вигляду: 50 55 ~ VK VtK 1 v vd tK , (2) де δv - систематична похибка масштабного коефіцієнта датчика шляхової швидкості; ηvd(tK) - некорельована випадкова похибка, що має нульове математичне очікування і відоме середньоквадратичне значення σvd; 1 UA 102436 C2 V(tK) - фактичне значення шляхової швидкості центра мас мобільної машини у момент часу t=tK. Без обмеження суті викладок приймається, що вихідні сигнали ДНСН відповідають наступним формулам: 5 10 15 ~CHC XK XtK X tK ; ~CHC ZK ZtK Z tK ; ~ CHC VXK VX tK V x tK ; ~ CHC VZK VZ tK V z tK , (3) де ηX(tK), ηZ(tK), ηVx(tK), ηVz(tK) - некорельовані випадкові похибки ДСНС у вимірюванні ортодромічних координат і складових шляхової швидкості центра мас мобільної машини, що мають нульові математичні очікування і відомі середньоквадратичні значення σRc, σVc; X(tK), Z(tK) - фактичні значення координат центра мас мобільної машини у момент часу t=tK; VX(tK), VZ(tK) - фактичні значення складових шляхових швидкостей центра мас мобільної машини у момент часу t=tK. Обчислення координат від курсо-швидкісної підсистеми мобільної машини виконується за формулами: ~ ~ ~ ~ XK 1 XtK VtK CostK T ; ~ ~ ~ ~ ZK 1 ZtK VtK SintK T , (4) ~ ~ де Xt 0 , Zt 0 - задані початкові умови; 20 ΔТ - крок дискретизації, що дорівнює періоду оновлення інформації від ДСНС. Вектор спостережень YK для фільтра (рис. 2) формується наступним чином: ~ ~ CHC ~ ~CHC ~ ~ CHC ~ ~ CHC T , (5) YK XK XK , ZK ZK , VXK VXK ,, VZK VZK ~ ~ ~ де VXK VKCosK ; ~ ~ ~ VZK VKSinK . 25 30 35 40 45 Таким чином, суть відомого способу комплексної обробки навігаційної інформації від КШНС та ДСНС полягає у оцінюванні похибок КШНС з використанням поточної позиційно-швидкісної інформації від ДСНС за допомогою лінійного дискретного фільтра і відповідної корекції КШНС щодо визначення координат центра мас об'єкту. Одним з недоліків відомого способу комплексної обробки навігаційної інформації від КШНС та ДСНС є можливе порушення лінійного характеру моделі еволюції похибок навігаційної системи при зростанні похибок обчислення координат. Іншим недоліком відомого способу комплексної обробки навігаційної інформації є низький рівень інтеграції (інтеграція відбувається на рівні систем: КШНС та ДСНС), а також неврахування динамічних властивостей навігаційних параметрів мобільної машини. Винаходом ставиться задача усунення відмічених недоліків, спрощення схеми комплексної обробки навігаційної інформації і забезпечення, таким чином, підвищеної просторової точності розрахунку координат та кінематичних режимів руху машини наземного базування. Спосіб, що пропонується, реалізується застосуванням блока оцінювання поправок до показань датчиків курсу та швидкості за допомогою ітераційного алгоритму нелінійної регресії, а також блоками корекції оцінок координат і поправок до показань датчиків та коваріаційної матриці помилок і екстраполяції оцінок координат та коваріаційних матриць помилок оцінок на один крок (Фіг. 3). Запропонований спосіб комплексної обробки навігаційної інформації забезпечує на кожному дискретному К-му кроці обробки інформації від ДСНС про діючі складові шляхової швидкості центра мас машини за допомогою спеціальної процедури нелінійної регресії розрахунок оцінок поправок до показань датчика курсу K і значень масштабного коефіцієнту датчика шляхової ˆ ˆ швидкості K . При цьому показання датчиків ДСНС по складовим шляхової швидкості центра мас мобільної машини представлені у вигляді: ~ CHC ~ ~ VXK VK 1 p Cos K p VXK ; 2 UA 102436 C2 ~ CHC ~ ~ VZK VK 1 p Sin K p VZK , (6) де Δδр та δψр - шукані поправки до показань датчика шляхової швидкості та курсу мобільної машини; V та V - випадкові збурення, що обумовлені випадковими похибками ДСНС та XK 5 ZK датчиками швидкості і курсу. На основі співвідношень (6) формується векторна модель нелінійної регресії вигляду: YK h , K , (7) ~ CHC ~ CHC T - вектор-стовпець поточних вимірювань складових швидкості за де YK VXK , VZK допомогою ДСНС; 10 T p ,p - вектор-стовпець шуканих поправок до показань датчиків швидкості та курсу; ~ ~ K VK , K T - вектор-стовпець поточних показань датчиків шляхової швидкості та курсу; T ~ ~ ~ ~ h , K XK , Z K , VK 1 p Cos K p , VK 1 p Sin K p ; - вектор випадкових збурень у рівнянні нелінійної регресії, що обумовлений випадковими 15 20 похибками ДСНС у вимірюванні складових швидкості центра мас мобільної машини, а також випадковими складовими помилок датчиків шляхової швидкості та кута курсу. Оцінки шуканого вектору поправок до показань датчиків шляхової швидкості і курсу на кожному К-ому кроці обробки навігаційної інформації пропонується отримувати за допомогою узагальненої нелінійної регресійної процедури типу Гауса-Ньютона вигляду [Захарин Ф. М. Методы и алгоритмы прикладного анализа. Вып. 2. Статистическая фильтрация. - К.: КВВАИУ, 1978,-148 с.]: ˆ ˆ ˆ , Ki1 Ki Г iK YR h Ki , K , i 0,12,...,imax , (8) ˆ h , K де Г iK ; ˆ li - символ операції псевдообернення матриці; 25 30 λ - параметр кроку ітерацій; imax - задане максимальне число ітерацій. Початкові значення компонент вектора поправок на першому кроці обробки навігаційної інформації задаються нульовими (при К=1). Як початкові значення оцінок вектора поправок для кроків К>1 беруться результати оцінювання вектора поправок із попереднього кроку (К-1). Г iK Г iK 35 40 Г iK та Г iK у процедурі (8) мають наступний вигляд: ~ ˆ ˆ ˆ ˆ ~ Cos K iK 1 iK Sin K iK ; (9) VK Sin ~ ˆ ˆ iK 1 iK Cos K iK ˆ ˆ K ˆ ˆ 1 iK Cos K iK 1 iK Sin K iK ˆ ˆ ˆ ˆ 1 . (10) ~ ˆ ˆ ˆ ˆ ˆ Cos K iK VK 1 iK Sin K iK Вирази для матриць На кожному К-ому кроці обробки навігаційної інформації окрім оцінювання поправок до показань датчиків за допомогою процедури (8) отримують також оцінки поточних координат центра мас мобільної машини і уточнені оцінки поправок K , K до показань датчиків. Для виконання останньої операції використовується процедура узагальненої дискретної фільтрації, у якій операція корекції оцінок координат центра мас мобільної машини і поправок до показань датчиків виконується тільки при наявності поточної позиційно-швидкісної інформації від ДСНС, а операція екстраполяції оцінок координат на кожному кроці обробки виконується за допомогою формул для курсо-швидкісного числення координат з урахуванням поточних значень оцінок поправок до показань датчиків шляхової швидкості та курсу. Вектор стану для узагальненого дискретного фільтра має вигляд: 3 UA 102436 C2 T EK XK , ZK , p , p , (11) де ΧК, ΖК, Δδр, δψр - шукані значення координат і поправок до показань датчиків. Дискретна модель еволюції вектора стану характеризується векторним співвідношенням вигляду: 5 EK 1 f EK B1K 1K B 2K 2K , (12) де 1K , 2K - чотиримірні вектори-стовпці некорельованих випадкових збурень з нульовими математичними очікуваннями і одиничними дисперсіями - вектори "білого" шуму; 00 0 0 1 00 0 0 B1K T 2 ; 0 0 0 V 00 0 ~ Vd Cos K VZ T 0 0 ˆ K 1 ~ ˆ Vd Sin K VX T 0 0 K B 2K T 2 ; 0 00 0 0 00 0 10 де , - задані параметри, що характеризують малі зміни (випадкові зсуви) V систематичних помилок δV та Δψ у часі; ~ ~ ~ VXK VK Cos K ; ~ ~ ~ VZK VK Sin K . Вектор-функція f EK має вигляд: 15 f EK ~ ~ VK 1 PK Cos K PK . (13) EK ~ V 1 Sin ~ PK K PK K Вектор спостережень для узагальненого дискретного фільтра формується у вигляді: ~ CHC ~ CHC ˆ T T YK XK , Z K , K , (14) ˆ де K - вектор оцінок поправок до показань датчиків, що отримані за допомогою процедури нелінійної регресії (8). 20 Вектор спостережень YK відповідає формулі: YK EK D1K 1K D 2K 2K . (15) У виразі (15) матриці D1K та D2K мають вигляд: 0 0 00 0 0 00 Vc ; (16) D1K ~ ~ ~ ˆ ˆ VK Cos K PK Sin K PK 0 0 Sin Cos 0 0 ~ ~ ˆ PK ˆ PK K K 0 0 0 Rc 0 0 0 Rc D 2K Vd ; (17) ~ V 0 0 0 K 0 0 0 d 25 Процедура узагальненої дискретної фільтрації (оцінювання вектору EK ), що відповідає моделі (12) у відповідності до спостережень вигляду (14) характеризується формулами [Липцер 4 UA 102436 C2 Р. Ш. Статистика случайных процессов. Нелинейная фильтрация и смежные вопросы. - М.: ˆ Наука, 1974.-696 с] корекції оцінок вектору EK та коваріаційної матриці помилок оцінки PK , що виконується за умов надходження позиційно-швидкісної інформації від ДСНС: 5 ˆ ˆ ˆ EK EK PK Q YK EK ; (18) T PK PK P Q P , (19) де T Q PK D1KD1K D2KDTK ; 2 T P B1K D1K B 2K D TK PK , 2 - символ операції псевдообернення матриці; ˆ Операція екстраполяції E та P , що виконується на кожному кроці обробки навігаційної 10 інформації, має вигляд: K K ˆ EK 1 f EK ; (20) ˆ T T PK 1 Ф K PK Ф K B1K B1K B 2K B TK , (21) 2 ~ ~ 1 0 VX T VZ T K K ~ ~ 0 1 VZ T VX T K K де Ф K - перехідна матриця. 00 1 0 00 0 1 15 20 25 Запропонований спосіб комплексної обробки навігаційної інформації характеризується високим рівнем інтеграції бортових навігаційних засобів (інтеграція відбувається на рівні датчиків первинної інформації), що дає можливість підвищити швидкість збіжності оцінок поправок до показань датчиків та оцінок координат центра мас машини, в результаті чого забезпечується висока точність оцінок навігаційних параметрів мобільної машини при мінімізації вартості обладнання і обчислювальних операцій. Таким чином, запропонований спосіб комплексної обробки навігаційної інформації не потребує використання лінійної моделі еволюції похибок КШНС у часі, дозволяє підвищити рівень інтеграції датчиків курсо-швидкісної та супутникової навігаційних систем, а також урахувати динамічні властивості навігаційних параметрів машини і, як наслідок, покращити просторову точність місцезнаходження машини на місцевості та істотно збільшити економічну ефективність від керування рухом по заданій траєкторії мобільних пілотних і безпілотних машин наземного базування. ФОРМУЛА ВИНАХОДУ 30 35 40 45 Спосіб комплексної обробки навігаційної інформації, що передбачає обчислення координат місцезнаходження центра мас рухомої машини наземного базування в вибраній системі координат за інформацією від курсо-швидкісної навігаційної системи (КШНС), до складу якої входять датчики кута курсу та шляхової швидкості, і проведення корекції розрахованих координат з використанням поточної позиційно-швидкісної інформації від бортової диференціальної супутникової навігаційної системи (ДСНС), який відрізняється тим, що на кожному дискретному кроці обробки навігаційної інформації з періодом, що дорівнює часу оновлення інформації від ДСНС, за допомогою нелінійної регресійної ітераційної процедури оцінюють поправки до показань датчика курсу та масштабного коефіцієнта датчика шляхової швидкості і отримують оцінки поточних координат положення центра мас та уточнені оцінки поправок до показань датчиків курсу і швидкості за допомогою узагальненого дискретного фільтра, в якому операція корекції оцінок координат центра мас і поправок до показань датчиків виконується тільки при наявності поточної позиційно-швидкісної інформації від ДСНС, а операція екстраполяції оцінок координат виконується на кожному кроці обробки за допомогою формул для курсо-швидкісного обчислення координат з урахуванням поточних оцінок поправок до показань датчиків курсу і шляхової швидкості. 5 UA 102436 C2 6 UA 102436 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for complex processing of navigation information
Автори англійськоюAniskevych Leonid Volodymyrovych, Voitiuk Dmytro Hryhorovych, Zakharin Feliks Mykhailovych
Назва патенту російськоюСпособ комплексной обработки навигационной информации
Автори російськоюАнискевич Леонид Владимирович, Войтюк Дмитрий Григорьевич, Захарин Феликс Михайлович
МПК / Мітки
МПК: G01C 21/00, G01C 21/28
Мітки: навігаційної, комплексної, інформації, спосіб, обробки
Код посилання
<a href="https://ua.patents.su/9-102436-sposib-kompleksno-obrobki-navigacijjno-informaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб комплексної обробки навігаційної інформації</a>
Спосіб комплексної обробки навігаційної інформації
Номер патенту: 69393
Опубліковано: 25.04.2012
Автори: Войтюк Дмитро Григорович, Аніскевич Леонід Володимирович, Захарін Фелікс Михайлович
МПК: G05B 15/00
Мітки: комплексної, навігаційної, інформації, спосіб, обробки
Формула / Реферат:
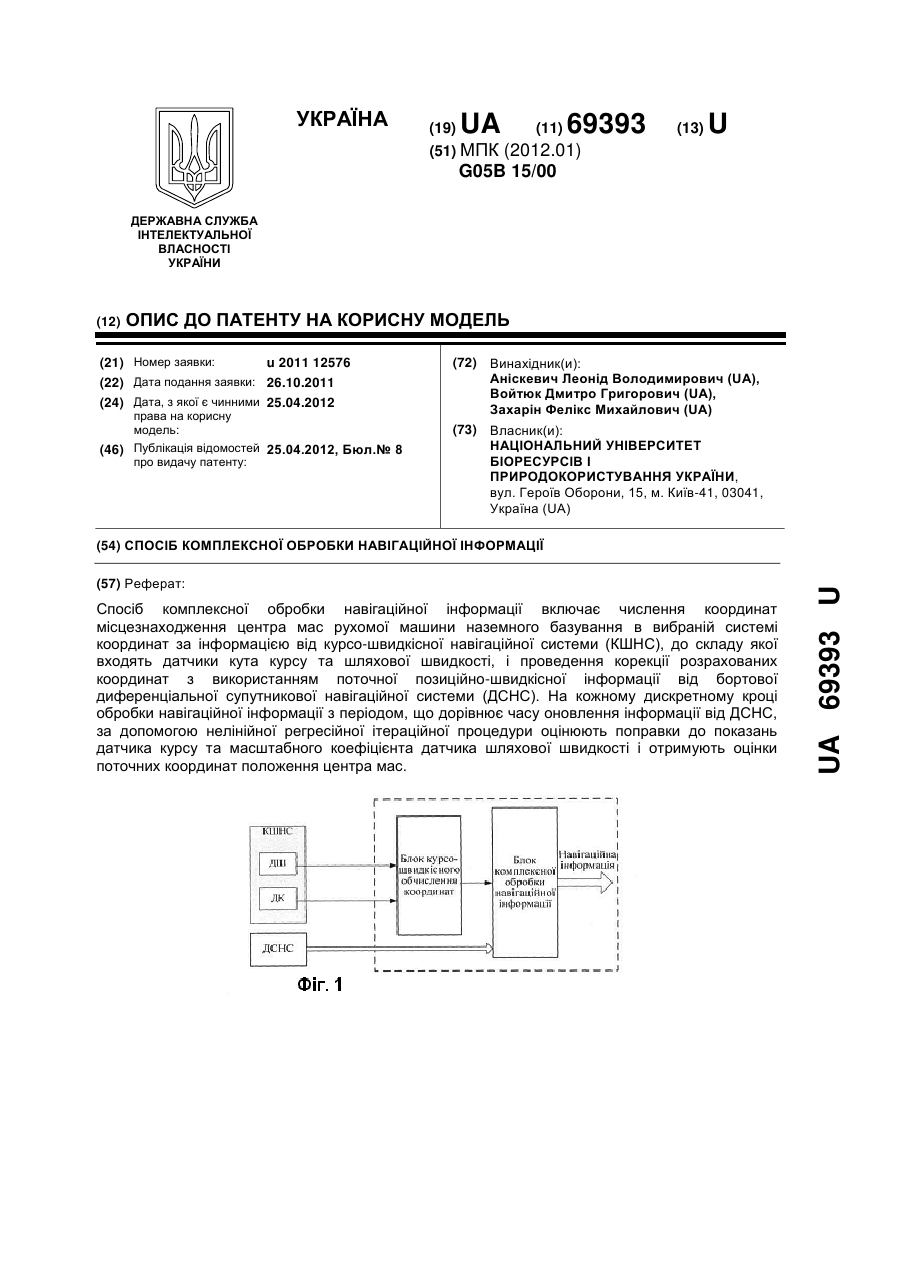
Спосіб комплексної обробки навігаційної інформації, що включає числення координат місцезнаходження центра мас рухомої машини наземного базування в вибраній системі координат за інформацією від курсо-швидкісної навігаційної системи (КШНС), до складу якої входять датчики кута курсу та шляхової швидкості, і проведення корекції розрахованих координат з використанням поточної позиційно-швидкісної інформації від бортової диференціальної...
Спосіб комплексної обробки навігаційної інформації від датчиків курсо-швидкісної навігаційної системи і супутникової навігаційної системи літального апарата
Номер патенту: 70281
Опубліковано: 11.06.2012
Автори: Захарін Фелікс Михайлович, Пономаренко Сергій Олексійович
МПК: G01C 21/20, G01C 23/00, G06F 17/00
Мітки: апарата, супутникової, літального, датчиків, системі, комплексної, навігаційної, курсо-швидкісної, інформації, спосіб, обробки
Формула / Реферат:
Спосіб комплексної обробки навігаційної інформації від датчиків курсо-швидкісної навігаційної системи і супутникової навігаційної системи літального апарата, що включає зчислення поточних координат місцеположення центру мас літального апарата у вибраній системі координат (частковоортодромічній, геоцентричній, географічній та ін.) за інформацією від датчиків курсо-швидкісної навігаційної системи, а також корекцію зчисленних координат за...
Пристрій для підтримки зв’язку у мережі зв’язку навігаційної системи, елемент такої мережі, спосіб для формування даних, що стосуються щонайменше одної навігаційної системи, носій інформації та сервер для здійс
Номер патенту: 94445
Опубліковано: 10.05.2011
Автори: Сюрйарінн Ярі, Вірола Лаурі, Аланен Кіммо
Мітки: здійс, даних, носій, такої, системі, зв'язку, навігаційної, спосіб, пристрій, підтримки, елемент, мережі, стосуються, сервер, щонайменше, формування, одної, інформації
Формула / Реферат:
1. Пристрій (R) для підтримки зв'язку у мережі зв'язку навігаційної системи, який має елемент R.1.1 перевірки, призначений для аналізу прийнятих допоміжних даних,який відрізняється тим, що також включаєелемент (R.1.2) визначення, виконаний з можливістю визначати режим допоміжних даних у зазначених допоміжних даних, причому ці допоміжні дані адаптовані для використання пристроєм для здійснення позиціонування пристрою...
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Ковалєвскій Міхаіл Марковіч, Рачук Владімір Сєргєєвіч, Карпов Анатолій Стєпановіч, Монахов Юрій Владіміровіч, Іванов Робєрт Константіновіч, Борісов Андрєй Владіміровіч
МПК: G01S 5/04, G01S 5/02, G01S 5/00
Мітки: варіанти, навігаційної, координат, визначення, інерціальної, об'єкта, системі, осей, відносної, положення, базової, спосіб
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Спосіб корегування пошуків за допомогою супутникової навігаційної системи
Номер патенту: 58548
Опубліковано: 11.04.2011
Автор: ДЕРЖАВНИЙ ВИЩИЙ НАВЧАЛЬНИЙ ЗАКЛАД ДОНЕЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
МПК: G01C 21/00
Мітки: пошуків, супутникової, допомогою, спосіб, корегування, навігаційної, системі
Формула / Реферат:
Спосіб корегування пошуків за допомогою супутникової навігаційної системи, що включає рекогносцировку відомих точок геодезичної мережі, точок згущення, визначення їхніх класів точності, вибір відомих точок як вихідних, закладення шуканих точок згущення і безпосереднього знімального обґрунтування на будинках і на земній поверхні, визначення точності геодезичних побудов шуканих точок згущення і знімального обґрунтування, виконання виміру,...
Попередній патент: Пристрій для фальцювання розгорток картонного пакування
Наступний патент: Композиції та способи для посилення м’язового росту
Випадковий патент: Спосіб омонолічування рідких пестицидів