Спосіб виявлення повітряних цілей за допомогою системи стільникового зв’язку
Номер патенту: 107094
Опубліковано: 25.05.2016
Автори: Зінченко Андрій Олександрович, Слюсар Вадим Іванович




Формула / Реферат
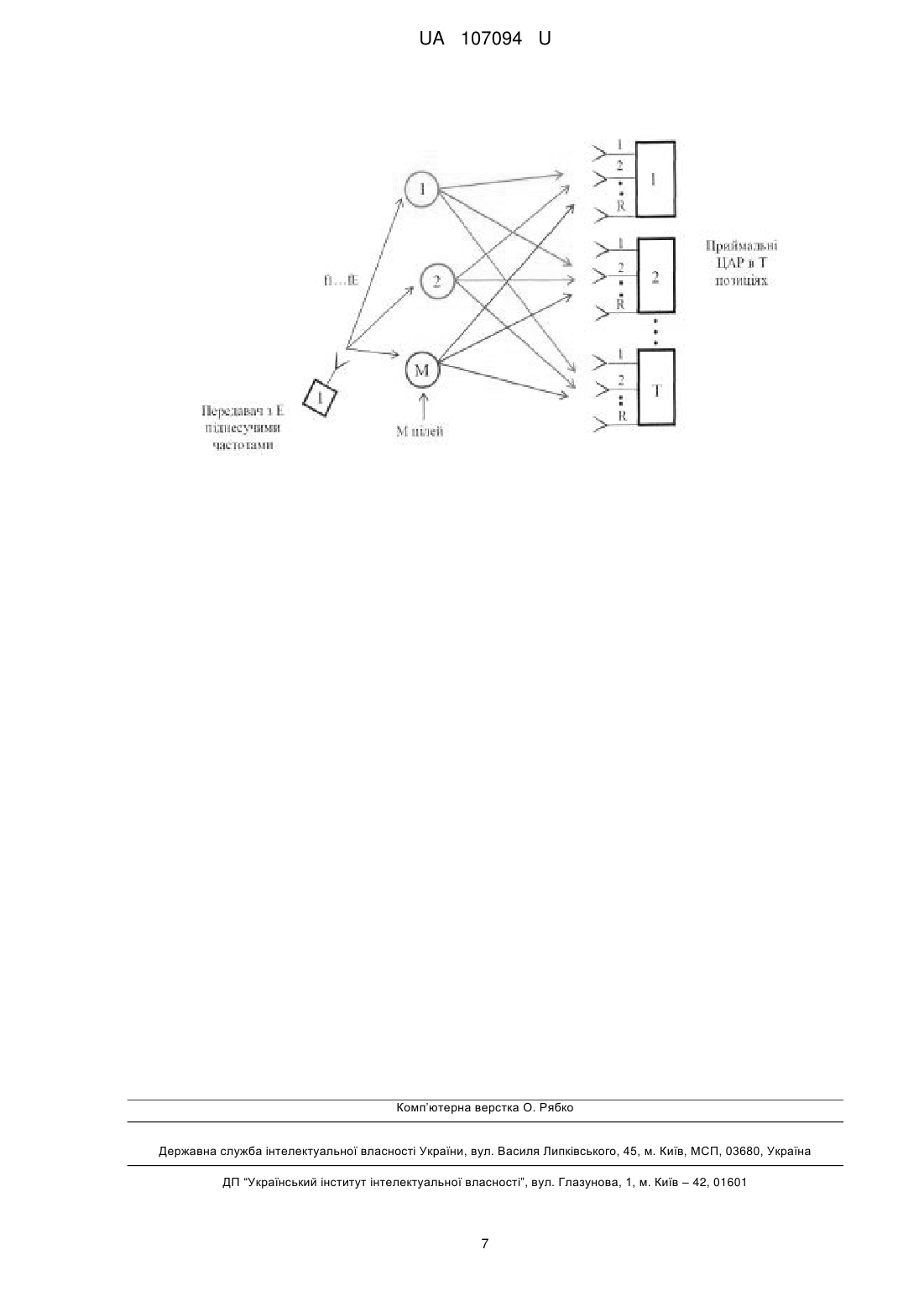
1. Спосіб виявлення повітряних цілей за допомогою системи стільникового зв'язку, який полягає у тому, що базові станції (БС) системи стільникового зв'язку випромінюють сигнали, які відбиваються від повітряних цілей і приймаються сукупністю приймачів, у кожному з яких здійснюється аналого-цифрове перетворення прийнятих сигналів цілей та подальша їх цифрова обробка для визначення координат цілей, отримані значення координат передаються на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, де проводиться формування трас та ідентифікація повітряних цілей, при цьому відбиті від повітряних цілей сигнали на кожній БС приймаються за допомогою цифрових антенних решіток, аналого-цифрове перетворення виконують в кожному з приймальних каналів цифрової антенної решітки, формують діаграму спрямованості антенної решітки цифровим способом, прийом сигналів повітряних цілей проводять за допомогою групи БС, розташованих уздовж очікуваного напрямку прольоту цілей, центри комутації мобільного зв'язку (ЦКМЗ) груп БС, що виявили цілі, дають цілевказання ЦКМЗ наступних груп БС, що розташовані на очікуваних напрямках руху цілей, а також видають інформацію про повітряні цілі на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, для придушення активних завад на БС застосовують адаптивне формування "нулів" цифрової діаграми спрямованості цифрової антенної решітки, для визначення координат цілей застосовують надрелеївське розділення відбитих від них сигналів, для формування зондуючих сигналів на БС, що залучаються для опромінення простору, застосовують активну цифрову антенну решітку, в якій виконують цифрове діаграмоутворення на передачу, причому необхідне амплітудно-фазове розподілення електромагнітного поля по антенним елементам розраховують у спецобчислювачі, а далі відтворюють його в кожному з передавальних каналів антенної решітки в аналоговому вигляді за допомогою цифро-аналогових перетворювачів, який відрізняється тим, що режими зв'язку та радіолокації розносять у часі, при цьому в режимі радіолокації за допомогою активної цифрової антенної решітки (ЦАР) випромінюють Е-частотний сигнал, сигнали, які прийняті одночасно кількома БС, оброблюються сумісно, а вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції, що сформована з відліків напруг сигналів по виходах приймальних каналів ЦАР БС та сигнальної матриці, елементи якої залежать від координат об'єктів локації, при цьому для пошуку максимуму вирішувальної функції здійснюється підбір можливих значень елементів сигнальної матриці.
2. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції
![]() ,
,
де ![]() - сигнальна матриця, елементи якої залежать від координат об'єктів локації,
- сигнальна матриця, елементи якої залежать від координат об'єктів локації, ![]() - вектор комплексних напруг сигналів, по виходах приймальних каналів ЦАР БС, * - символ комплексного сполучення матриць,
- вектор комплексних напруг сигналів, по виходах приймальних каналів ЦАР БС, * - символ комплексного сполучення матриць, ![]() - символ операції транспонування матриць.
- символ операції транспонування матриць.
3. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції
![]() , де
, де ![]() - слід матриці.
- слід матриці.
4. Спосіб за п.1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції
![]() ,
,
де ![]() - знак математичного очікування,
- знак математичного очікування, ![]() - операція векторизації матриці
- операція векторизації матриці ![]() .
.
5. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції, сформованої за методом MUSIC:
![]() ,
,
де ![]() - діагональна матриця, що утворена з шумових власних чисел матриці
- діагональна матриця, що утворена з шумових власних чисел матриці ![]() .
.
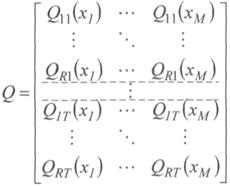
6. Спосіб за пунктами 1-5, який відрізняється тим, що у режимі радіолокації та у випадку лінійних антенних решіток в усіх БС сигнальна матриця має вигляд:
![]() ,
,
де ![]() - символ блокового добутку Кронекера,
- символ блокового добутку Кронекера, 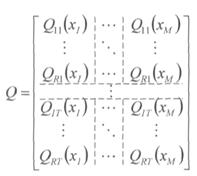 - блокова матриця діаграм спрямованості антенних елементів в азимутальній площині
- блокова матриця діаграм спрямованості антенних елементів в азимутальній площині ![]() у напрямках на
у напрямках на ![]() джерело сигналів з кутовою координатою
джерело сигналів з кутовою координатою ![]() ;
; ![]() - порядковий номер антенного елемента в антенній решітці у відповідній кутовій площині,
- порядковий номер антенного елемента в антенній решітці у відповідній кутовій площині, ![]() - порядковий номер БС;
- порядковий номер БС;
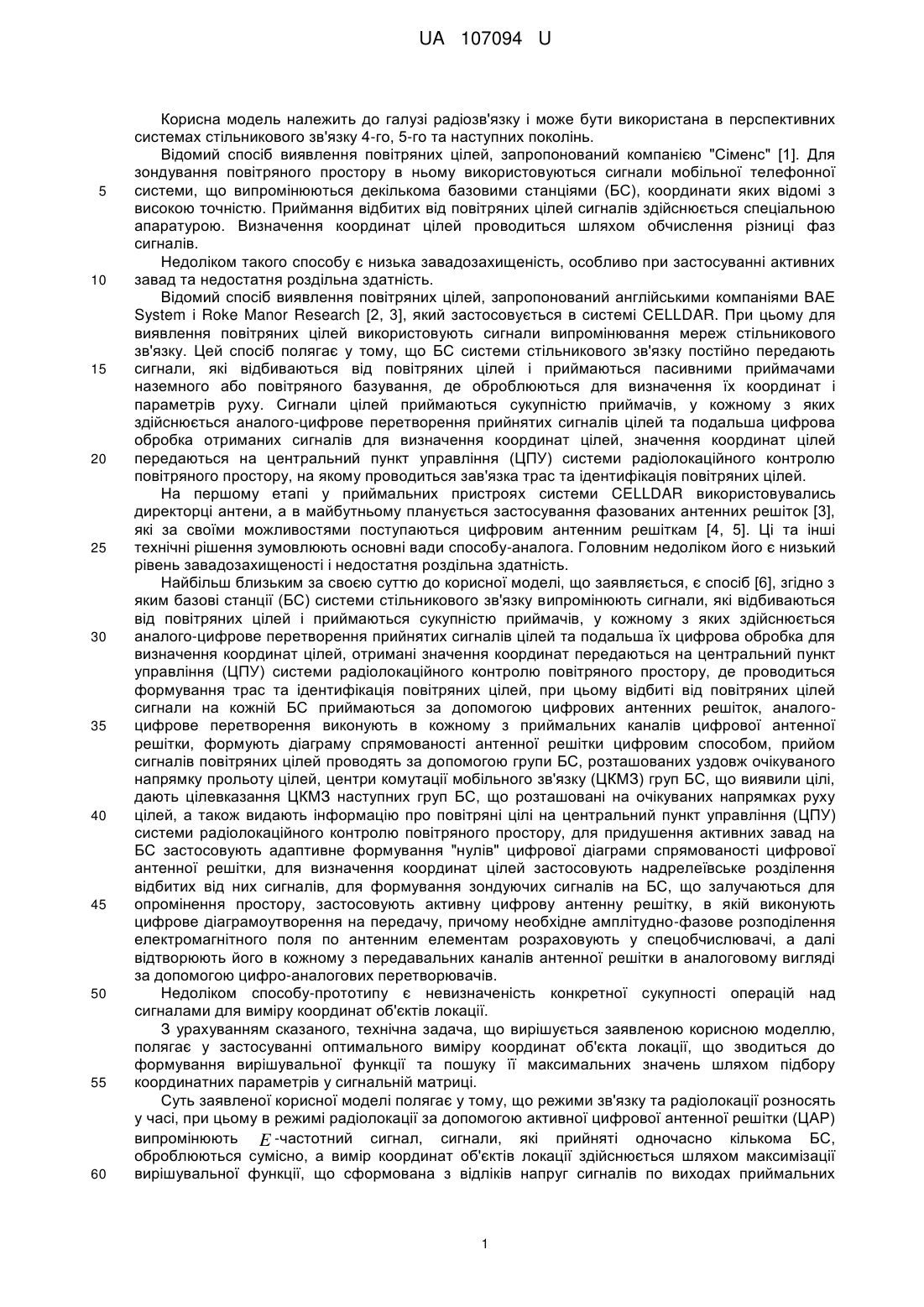
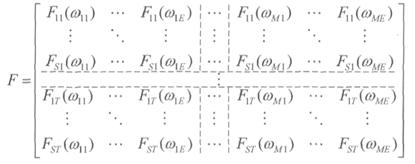 - блокова матриця амплітудно-частотних характеристик (АЧХ)
- блокова матриця амплітудно-частотних характеристик (АЧХ) ![]() частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на
частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на ![]() частотах відбитих від
частотах відбитих від ![]() цілей
цілей ![]() сигналів;
сигналів;
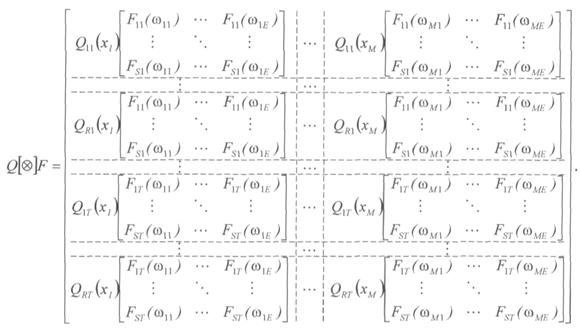 .
.
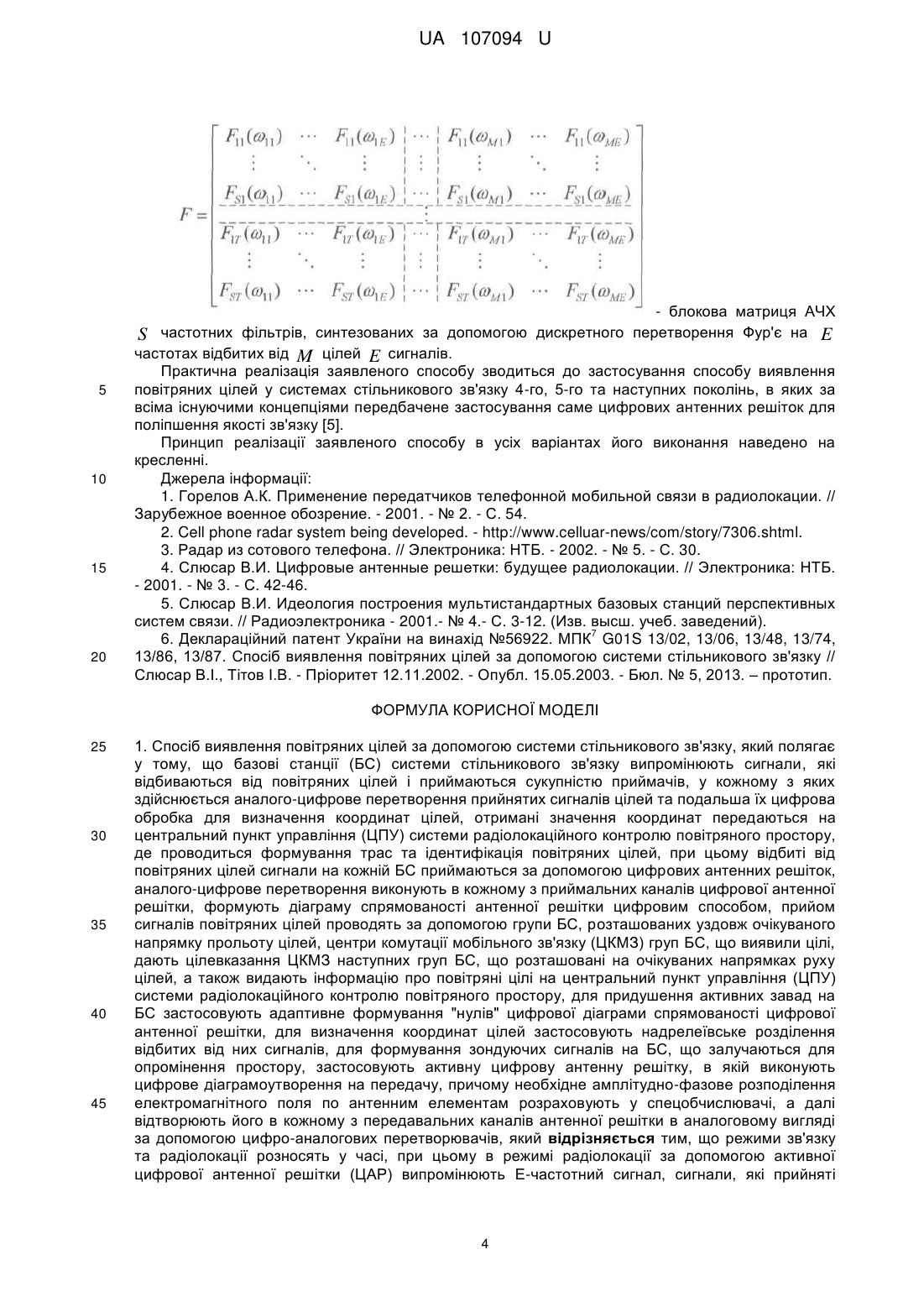
7. Спосіб за пунктами 1-5, який відрізняється тим, що у режимі радіолокації та у випадку плоских приймальних ЦАР з ![]() елементів в усіх БС сигнальна матриця має вигляд:
елементів в усіх БС сигнальна матриця має вигляд:
P=(Q[■]V)[Ä]F,
де [■] - символ блокового матричного добутку Хатри- Рао; ![]() - символ блокового добутку Кронекера,
- символ блокового добутку Кронекера,
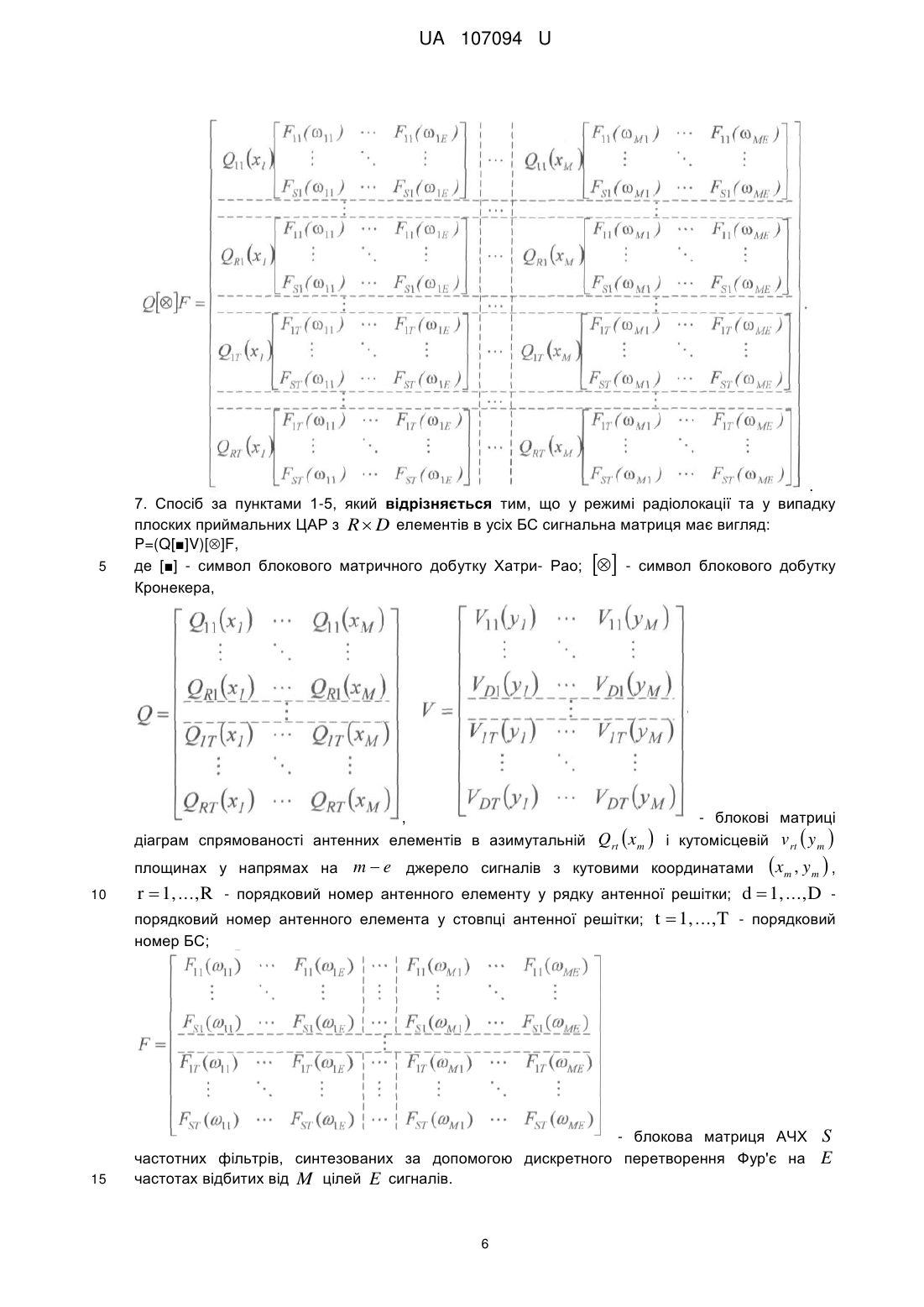
 ,
, 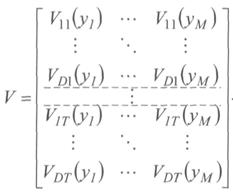 - блокові матриці діаграм спрямованості антенних елементів в азимутальній
- блокові матриці діаграм спрямованості антенних елементів в азимутальній ![]() і кутомісцевій
і кутомісцевій ![]() площинах у напрямах на
площинах у напрямах на ![]() джерело сигналів з кутовими координатами
джерело сигналів з кутовими координатами ![]() ,
, ![]() - порядковий номер антенного елементу у рядку антенної решітки;
- порядковий номер антенного елементу у рядку антенної решітки; ![]() - порядковий номер антенного елемента у стовпці антенної решітки;
- порядковий номер антенного елемента у стовпці антенної решітки; ![]() - порядковий номер БС;;
- порядковий номер БС;;
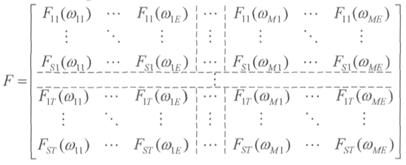 - блокова матриця АЧХ
- блокова матриця АЧХ ![]() частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на
частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на ![]() частотах відбитих від
частотах відбитих від ![]() цілей
цілей ![]() сигналів.
сигналів.
Текст
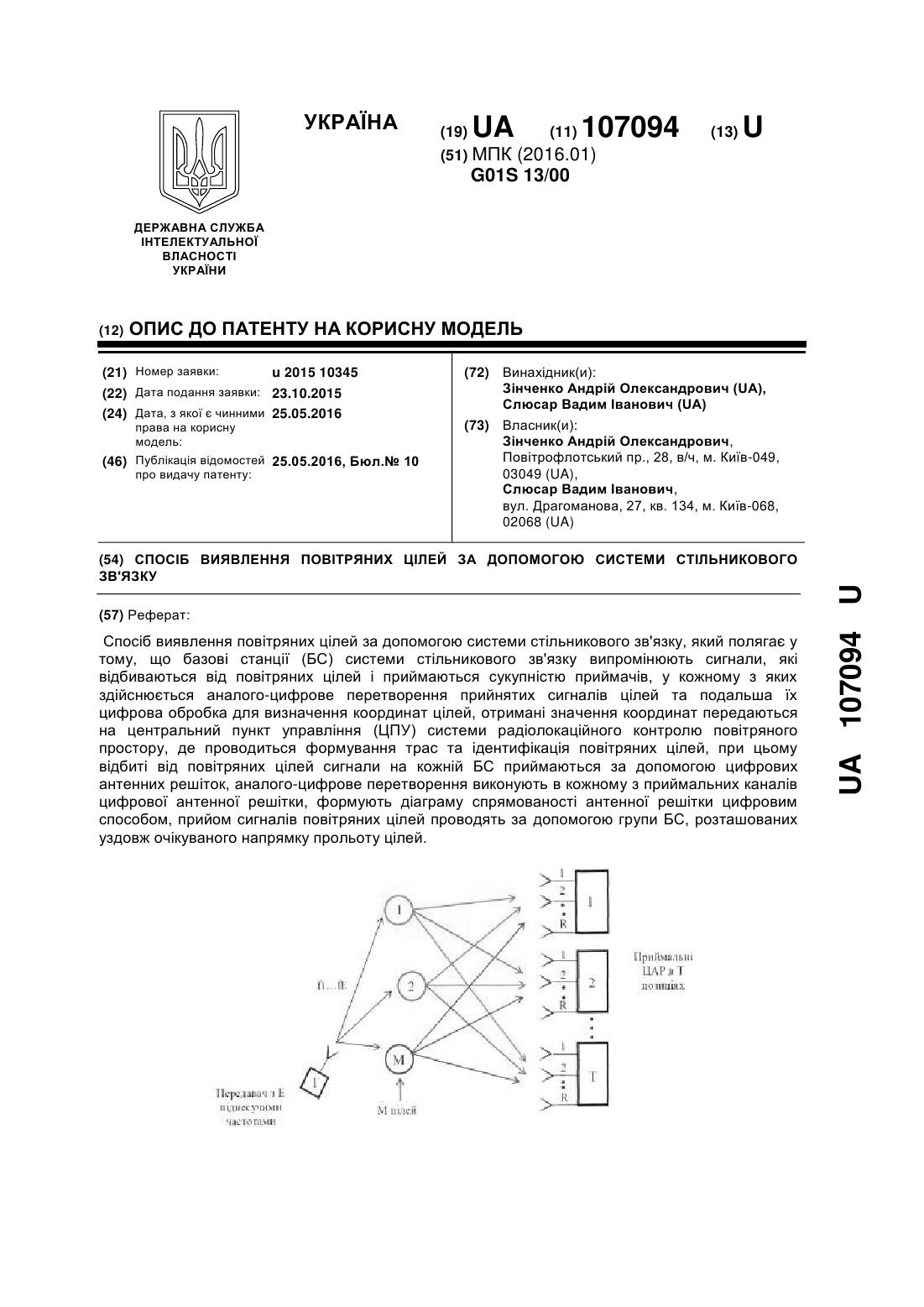
Реферат: Спосіб виявлення повітряних цілей за допомогою системи стільникового зв'язку, який полягає у тому, що базові станції (БС) системи стільникового зв'язку випромінюють сигнали, які відбиваються від повітряних цілей і приймаються сукупністю приймачів, у кожному з яких здійснюється аналого-цифрове перетворення прийнятих сигналів цілей та подальша їх цифрова обробка для визначення координат цілей, отримані значення координат передаються на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, де проводиться формування трас та ідентифікація повітряних цілей, при цьому відбиті від повітряних цілей сигнали на кожній БС приймаються за допомогою цифрових антенних решіток, аналого-цифрове перетворення виконують в кожному з приймальних каналів цифрової антенної решітки, формують діаграму спрямованості антенної решітки цифровим способом, прийом сигналів повітряних цілей проводять за допомогою групи БС, розташованих уздовж очікуваного напрямку прольоту цілей. UA 107094 U (54) СПОСІБ ВИЯВЛЕННЯ ПОВІТРЯНИХ ЦІЛЕЙ ЗА ДОПОМОГОЮ СИСТЕМИ СТІЛЬНИКОВОГО ЗВ'ЯЗКУ UA 107094 U UA 107094 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі радіозв'язку і може бути використана в перспективних системах стільникового зв'язку 4-го, 5-го та наступних поколінь. Відомий спосіб виявлення повітряних цілей, запропонований компанією "Сіменс" [1]. Для зондування повітряного простору в ньому використовуються сигнали мобільної телефонної системи, що випромінюються декількома базовими станціями (БС), координати яких відомі з високою точністю. Приймання відбитих від повітряних цілей сигналів здійснюється спеціальною апаратурою. Визначення координат цілей проводиться шляхом обчислення різниці фаз сигналів. Недоліком такого способу є низька завадозахищеність, особливо при застосуванні активних завад та недостатня роздільна здатність. Відомий спосіб виявлення повітряних цілей, запропонований англійськими компаніями ВАЕ System і Roke Manor Research [2, 3], який застосовується в системі CELLDAR. При цьому для виявлення повітряних цілей використовують сигнали випромінювання мереж стільникового зв'язку. Цей спосіб полягає у тому, що БС системи стільникового зв'язку постійно передають сигнали, які відбиваються від повітряних цілей і приймаються пасивними приймачами наземного або повітряного базування, де оброблюються для визначення їх координат і параметрів руху. Сигнали цілей приймаються сукупністю приймачів, у кожному з яких здійснюється аналого-цифрове перетворення прийнятих сигналів цілей та подальша цифрова обробка отриманих сигналів для визначення координат цілей, значення координат цілей передаються на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, на якому проводиться зав'язка трас та ідентифікація повітряних цілей. На першому етапі у приймальних пристроях системи CELLDAR використовувались директорці антени, а в майбутньому планується застосування фазованих антенних решіток [3], які за своїми можливостями поступаються цифровим антенним решіткам [4, 5]. Ці та інші технічні рішення зумовлюють основні вади способу-аналога. Головним недоліком його є низький рівень завадозахищеності і недостатня роздільна здатність. Найбільш близьким за своєю суттю до корисної моделі, що заявляється, є спосіб [6], згідно з яким базові станції (БС) системи стільникового зв'язку випромінюють сигнали, які відбиваються від повітряних цілей і приймаються сукупністю приймачів, у кожному з яких здійснюється аналого-цифрове перетворення прийнятих сигналів цілей та подальша їх цифрова обробка для визначення координат цілей, отримані значення координат передаються на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, де проводиться формування трас та ідентифікація повітряних цілей, при цьому відбиті від повітряних цілей сигнали на кожній БС приймаються за допомогою цифрових антенних решіток, аналогоцифрове перетворення виконують в кожному з приймальних каналів цифрової антенної решітки, формують діаграму спрямованості антенної решітки цифровим способом, прийом сигналів повітряних цілей проводять за допомогою групи БС, розташованих уздовж очікуваного напрямку прольоту цілей, центри комутації мобільного зв'язку (ЦКМЗ) груп БС, що виявили цілі, дають цілевказання ЦКМЗ наступних груп БС, що розташовані на очікуваних напрямках руху цілей, а також видають інформацію про повітряні цілі на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, для придушення активних завад на БС застосовують адаптивне формування "нулів" цифрової діаграми спрямованості цифрової антенної решітки, для визначення координат цілей застосовують надрелеївське розділення відбитих від них сигналів, для формування зондуючих сигналів на БС, що залучаються для опромінення простору, застосовують активну цифрову антенну решітку, в якій виконують цифрове діаграмоутворення на передачу, причому необхідне амплітудно-фазове розподілення електромагнітного поля по антенним елементам розраховують у спецобчислювачі, а далі відтворюють його в кожному з передавальних каналів антенної решітки в аналоговому вигляді за допомогою цифро-аналогових перетворювачів. Недоліком способу-прототипу є невизначеність конкретної сукупності операцій над сигналами для виміру координат об'єктів локації. З урахуванням сказаного, технічна задача, що вирішується заявленою корисною моделлю, полягає у застосуванні оптимального виміру координат об'єкта локації, що зводиться до формування вирішувальної функції та пошуку її максимальних значень шляхом підбору координатних параметрів у сигнальній матриці. Суть заявленої корисної моделі полягає у тому, що режими зв'язку та радіолокації розносять у часі, при цьому в режимі радіолокації за допомогою активної цифрової антенної решітки (ЦАР) випромінюють E -частотний сигнал, сигнали, які прийняті одночасно кількома БС, оброблюються сумісно, а вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції, що сформована з відліків напруг сигналів по виходах приймальних 1 UA 107094 U 5 10 каналів ЦАР БС та сигнальної матриці, елементи якої залежать від координат об'єктів локації, при цьому для пошуку максимуму вирішувальної функції здійснюється підбір можливих значень елементів сигнальної матриці. Конкретний варіант виконання заявленого способу відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції E, де P - сигнальна матриця, елементи якої залежать від координат об'єктів локації, U вектор комплексних напруг сигналів, по виходах приймальних каналів ЦАР БС, * - символ комплексного сполучення матриць, T - символ операції транспонування матриць. Можливий варіант заявленого способу, в якому вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції 1 L tr P P * P P * U U * , 15 де tr - слід матриці. Вимір координат об'єктів вирішувальної функції локації може здійснюватися також шляхом максимізації L vecP EUU * vecP , де E - знак математичного очікування, vecP - операція векторизації матриці P або T 1 1 вирішувальної функції, сформованої за методом MUSIC: 20 L vecP RM vecP , де RM - діагональна матриця, що утворена з шумових власних чисел матриці EUU * . T 1 В зазначених варіантах реалізації заявленого способу у режимі радіолокації та у випадку лінійних антенних решіток в усіх БС сигнальна матриця має вигляд: PQ F , де - символ блокового добутку Кронекера, 25 блокова матриця діаграм спрямованості антенних елементів в азимутальній площині Qrt xm у напрямках на m e джерело сигналів з кутовою координатою xm ; r 1,...,R - порядковий номер антенного елемента в антенній решітці у відповідній кутовій площині, 30 t 1,...,T - порядковий номер БС, - блокова матриця амплітудно-частотних характеристик (АЧХ) S частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на E частотах відбитих від M цілей E сигналів; 2 UA 107094 U 5 . У випадку плоских приймальних ЦАР з R D елементів в усіх БС у режимі радіолокації сигнальна матриця має вигляд: P=(Q[ ]V)[]F, де [ ] - символ блокового матричного добутку Хатри- Рао; - символ блокового добутку Кронекера, , блокові матриці діаграм спрямованості антенних елементів в азимутальній Qrt xm і кутомісцевій 10 vrt y m площинах у напрямах на m e джерело сигналів з кутовими координатами xm , ym , r 1,...,R - порядковий номер антенного елемента у рядку антенної решітки; d 1,...,D - порядковий номер антенного елемента у стовпці антенної решітки; t 1,...,T - порядковий номер БС; 3 UA 107094 U - блокова матриця АЧХ S частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на E частотах відбитих від M цілей E сигналів. 5 10 15 20 Практична реалізація заявленого способу зводиться до застосування способу виявлення повітряних цілей у системах стільникового зв'язку 4-го, 5-го та наступних поколінь, в яких за всіма існуючими концепціями передбачене застосування саме цифрових антенних решіток для поліпшення якості зв'язку [5]. Принцип реалізації заявленого способу в усіх варіантах його виконання наведено на кресленні. Джерела інформації: 1. Горелов А.К. Применение передатчиков телефонной мобильной связи в радиолокации. // Зарубежное военное обозрение. - 2001. - № 2. - С. 54. 2. Cell phone radar system being developed. - http://www.celluar-news/com/story/7306.shtml. 3. Радар из сотового телефона. // Электроника: НТБ. - 2002. - № 5. - С. 30. 4. Слюсар В.И. Цифровые антенные решетки: будущее радиолокации. // Электроника: НТБ. - 2001. - № 3. - С. 42-46. 5. Слюсар В.И. Идеология построения мультистандартных базовых станций перспективных систем связи. // Радиоэлектроника - 2001.- № 4.- С. 3-12. (Изв. высш. учеб. заведений). 7 6. Деклараційний патент України на винахід №56922. МПК G01S 13/02, 13/06, 13/48, 13/74, 13/86, 13/87. Спосіб виявлення повітряних цілей за допомогою системи стільникового зв'язку // Слюсар В.І., Тітов І.В. - Пріоритет 12.11.2002. - Опубл. 15.05.2003. - Бюл. № 5, 2013. – прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 1. Спосіб виявлення повітряних цілей за допомогою системи стільникового зв'язку, який полягає у тому, що базові станції (БС) системи стільникового зв'язку випромінюють сигнали, які відбиваються від повітряних цілей і приймаються сукупністю приймачів, у кожному з яких здійснюється аналого-цифрове перетворення прийнятих сигналів цілей та подальша їх цифрова обробка для визначення координат цілей, отримані значення координат передаються на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, де проводиться формування трас та ідентифікація повітряних цілей, при цьому відбиті від повітряних цілей сигнали на кожній БС приймаються за допомогою цифрових антенних решіток, аналого-цифрове перетворення виконують в кожному з приймальних каналів цифрової антенної решітки, формують діаграму спрямованості антенної решітки цифровим способом, прийом сигналів повітряних цілей проводять за допомогою групи БС, розташованих уздовж очікуваного напрямку прольоту цілей, центри комутації мобільного зв'язку (ЦКМЗ) груп БС, що виявили цілі, дають цілевказання ЦКМЗ наступних груп БС, що розташовані на очікуваних напрямках руху цілей, а також видають інформацію про повітряні цілі на центральний пункт управління (ЦПУ) системи радіолокаційного контролю повітряного простору, для придушення активних завад на БС застосовують адаптивне формування "нулів" цифрової діаграми спрямованості цифрової антенної решітки, для визначення координат цілей застосовують надрелеївське розділення відбитих від них сигналів, для формування зондуючих сигналів на БС, що залучаються для опромінення простору, застосовують активну цифрову антенну решітку, в якій виконують цифрове діаграмоутворення на передачу, причому необхідне амплітудно-фазове розподілення електромагнітного поля по антенним елементам розраховують у спецобчислювачі, а далі відтворюють його в кожному з передавальних каналів антенної решітки в аналоговому вигляді за допомогою цифро-аналогових перетворювачів, який відрізняється тим, що режими зв'язку та радіолокації розносять у часі, при цьому в режимі радіолокації за допомогою активної цифрової антенної решітки (ЦАР) випромінюють Е-частотний сигнал, сигнали, які прийняті 4 UA 107094 U 5 одночасно кількома БС, оброблюються сумісно, а вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції, що сформована з відліків напруг сигналів по виходах приймальних каналів ЦАР БС та сигнальної матриці, елементи якої залежать від координат об'єктів локації, при цьому для пошуку максимуму вирішувальної функції здійснюється підбір можливих значень елементів сигнальної матриці. 2. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції 1 L U * P PT P PT U , де P - сигнальна матриця, елементи якої залежать від координат об'єктів локації, U - вектор 10 комплексних напруг сигналів, по виходах приймальних каналів ЦАР БС, * - символ комплексного сполучення матриць, T - символ операції транспонування матриць. 3. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції L tr P P * P P * U U * , де tr - слід матриці. 15 1 4. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції L vecP EUU * vecP , де E - знак математичного очікування, vecP - операція векторизації матриці P . 20 25 T 1 1 5. Спосіб за п. 1, який відрізняється тим, що вимір координат об'єктів локації здійснюється шляхом максимізації вирішувальної функції, сформованої за методом MUSIC: L vecP RM vecP , де RM - діагональна матриця, що утворена з шумових власних чисел матриці EUU * . T 1 6. Спосіб за пунктами 1-5, який відрізняється тим, що у режимі радіолокації та у випадку лінійних антенних решіток в усіх БС сигнальна матриця має вигляд: PQ F , де - символ блокового добутку Кронекера, - блокова матриця діаграм спрямованості антенних елементів в азимутальній площині Qrt xm у xm ; r 1, ..., R - порядковий номер антенного елемента в антенній решітці у відповідній кутовій площині, t 1, ..., T напрямках на m e джерело сигналів з кутовою координатою 30 порядковий номер БС; блокова матриця амплітудно-частотних характеристик (АЧХ) S частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на E частотах відбитих від M цілей E сигналів; 5 UA 107094 U 5 . 7. Спосіб за пунктами 1-5, який відрізняється тим, що у режимі радіолокації та у випадку плоских приймальних ЦАР з R D елементів в усіх БС сигнальна матриця має вигляд: P=(Q[ ]V)[]F, де [ ] - символ блокового матричного добутку Хатри- Рао; - символ блокового добутку Кронекера, , - блокові матриці діаграм спрямованості антенних елементів в азимутальній Qrt xm і кутомісцевій v rt y m площинах у напрямах на m e джерело сигналів з кутовими координатами 10 xm , y m , r 1, ..., R - порядковий номер антенного елементу у рядку антенної решітки; d 1, ..., D порядковий номер антенного елемента у стовпці антенної решітки; t 1, ..., T - порядковий номер БС; 15 - блокова матриця АЧХ частотних фільтрів, синтезованих за допомогою дискретного перетворення Фур'є на частотах відбитих від M цілей E сигналів. 6 S E UA 107094 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/00
Мітки: цілей, стільникового, спосіб, допомогою, зв'язку, системі, повітряних, виявлення
Код посилання
<a href="https://ua.patents.su/9-107094-sposib-viyavlennya-povitryanikh-cilejj-za-dopomogoyu-sistemi-stilnikovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Спосіб виявлення повітряних цілей за допомогою системи стільникового зв’язку</a>
Спосіб виявлення повітряних цілей за допомогою системи стільникового зв’язку
Номер патенту: 56922
Опубліковано: 15.05.2003
Автори: Слюсар Вадим Іванович, Тітов Ігор Володимирович
МПК: G01S 13/87, G01S 13/86, G01S 13/74, G01S 13/06, G01S 13/48, G01S 13/02
Мітки: допомогою, цілей, системі, повітряних, зв'язку, спосіб, виявлення, стільникового
Формула / Реферат:
1. Спосіб виявлення повітряних цілей за допомогою системи стільникового зв'язку, який полягає у тому, що базові станції (БС) системи стільникового зв'язку постійно передають сигнали, які відбиваються від повітряних цілей і приймаються сукупністю пасивних приймачів, у кожному з яких здійснюють аналого-цифрове перетворення прийнятих сигналів цілей та подальшу їх цифрову обробку для визначення координат цілей, отримані значення координат...
Система виявлення, розпізнавання, супроводження повітряних та наземних цілей
Номер патенту: 104494
Опубліковано: 10.02.2016
Автори: Дупелич Сергій Олексійович, Даник Юрій Григорович
МПК: G01S 17/00, G01S 13/00, G01S 11/00
Мітки: повітряних, супроводження, наземних, розпізнавання, цілей, система, виявлення
Формула / Реферат:
Система виявлення, розпізнавання, супроводження повітряних та наземних цілей, що містить комплекс засобів радіолокації, який оснащено засобами пасивної та активної радіолокації, засобами державної системи радіолокаційного розпізнавання, комплекс засобів автоматизації, при цьому комплекс засобів радіолокації пов'язаний каналом передачі розвідувальних даних з комплексом засобів автоматизації, який у свою чергу пов'язаний каналом видачі...
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31157
Опубліковано: 25.03.2008
Автори: Чіпіжко Юрій Анатолійович, Анпьонов Валентин Вадимович, Машталір Вадим Віталійович, Лапицький Сергій Володимирович, Василенко Олександр Васильович, Степаненко Юрій Костянтинович, Парфеня Сергій Григорович, Сила Ігор Михайлович, Комаров Володимир Олександрович, Кононов Олексій Анатолійович, Мельник Олександр Дмитрович, Галушка Володимир Іванович, Бондарчук Сергій Вікторович, Чучмій Андрій Володимирович, Схабіцький Вадим Романович, Гребеник Олександр Миколайович, Растригін Олександр Олексійович, Гордієвський Олексій Тихонович, Ткаченко Володимир Анатолійович, Борохвостов Ігор Валерійович, Асланян Альберт Едуардович, Лук'янов Павло Олександрович
МПК: H04B 7/185, B64C 31/00
Мітки: апаратів, знищення, керованих, безпілотних, цілей, повітряних, літальних, допомогою, дистанційно, спосіб
Формула / Реферат:
Спосіб знищення повітряних цілей за допомогою дистанційно керованих безпілотних літальних апаратів, при якому підготовляють дистанційно керований безпілотний літальний апарат, що містить вбудоване навігаційне устаткування і систему GPS, підготовляють засоби ураження і розгортають пункт керування, установлюють засоби ураження на дистанційно керований безпілотний літальний апарат, проводять зліт дистанційно керованого безпілотного літального...
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою
Номер патенту: 78101
Опубліковано: 11.03.2013
Автори: Поповнін Юрій Михайлович, Харланов Олексій Володимирович
МПК: G01S 7/36
Мітки: захисту, адаптивна, цілей, радіолокаційних, виявлення, просторово-поляризаційною, завад, повітряних, корабельних, повільною, структурою, станцій, активних, шумових, система
Формула / Реферат:
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурую, яка складається: з цифрової антенної решітки (1) з біортогональними елементами, складові яких настроєні на прийом вертикально (2) й горизонтально (3) поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів (11), які пов'язані зі складовими антенних...
Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів
Номер патенту: 31128
Опубліковано: 25.03.2008
Автори: Кононов Олексій Анатолійович, Лук'янов Павло Олександрович, Гребеник Олександр Миколайович, Галушка Володимир Іванович, Василенко Олександр Васильович, Степаненко Юрій Костянтинович, Чучмій Андрій Володимирович, Сєткін В'ячеслав Вікторович, Схабіцький Вадим Романович, Ткаченко Володимир Анатолійович, Анпьонов Валентин Вадимович, Асланян Альберт Едуардович, Гордієвський Олексій Тихонович, Растригін Олександр Олексійович, Сила Ігор Михайлович, Машталір Вадим Віталійович, Мельник Олександр Дмитрович, Лапицький Сергій Володимирович, Борохвостов Ігор Валерійович, Чіпіжко Юрій Анатолійович, Семенюк Римма Петрівна, Комаров Володимир Олександрович, Парфеня Сергій Григорович
МПК: H04B 7/185, B64C 31/00
Мітки: літальних, керованих, спосіб, допомогою, повітряних, ударних, дистанційно, цілей, апаратів, безпілотних, знищення
Формула / Реферат:
1. Спосіб знищення повітряних цілей за допомогою ударних дистанційно керованих безпілотних літальних апаратів, при якому підготовлюють ударні дистанційно керовані безпілотні літальні апарати, кожний з яких містить вбудоване навігаційне устаткування, систему GPS і фото/відеоапаратуру, підготовлюють засоби ураження і розгортають пункт прийому інформації, встановлюють засоби ураження на кожний з ударних дистанційно керованих безпілотних...
Попередній патент: Набір для вишивання бісером на полотні декоративному тканому (канві)
Наступний патент: Пристрій для біопсії м’яких тканин
Випадковий патент: Спосіб розкислення та легування конвертерної сталі алюмінієм