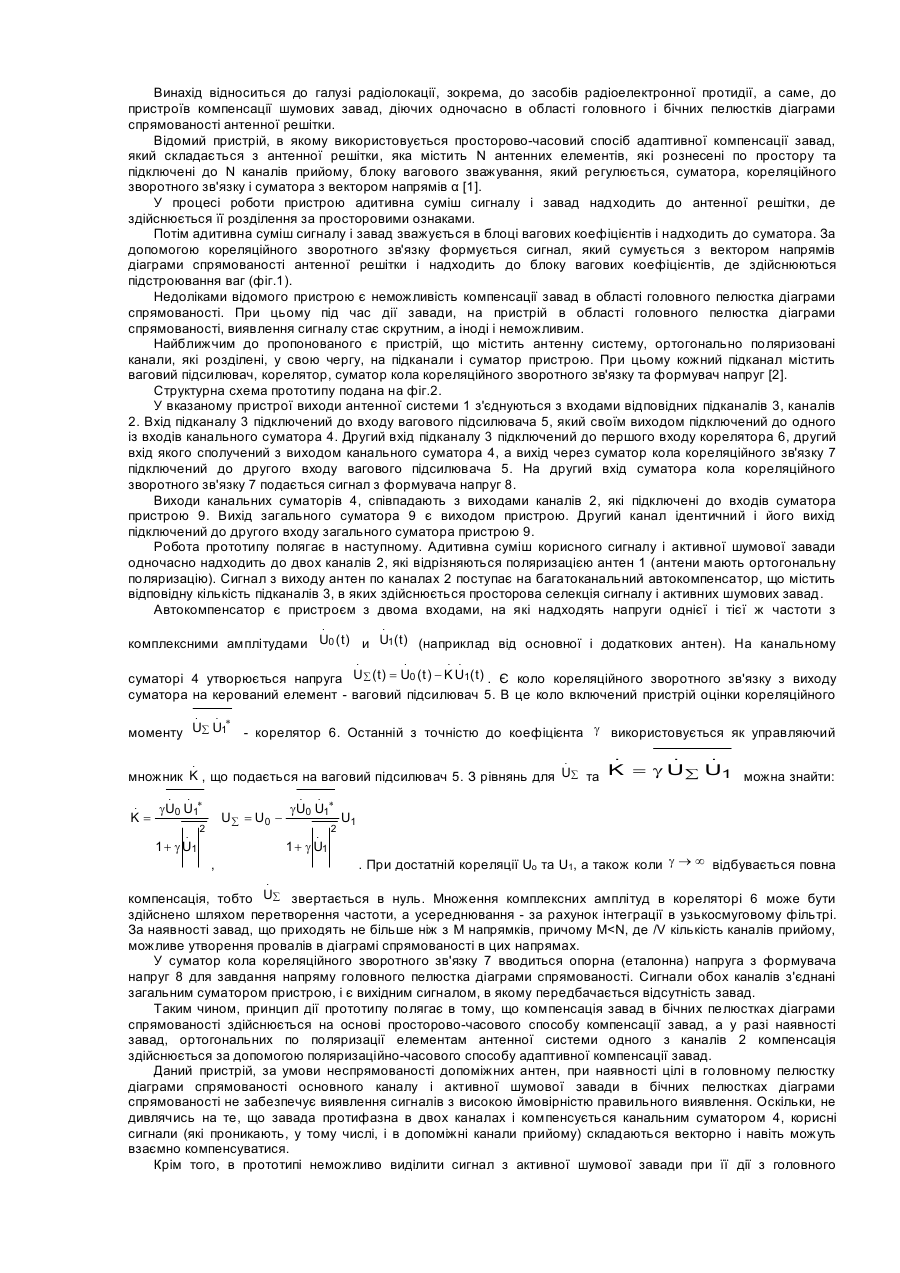
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою
Номер патенту: 78101
Опубліковано: 11.03.2013
Автори: Харланов Олексій Володимирович, Поповнін Юрій Михайлович
Формула / Реферат
Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурую, яка складається: з цифрової антенної решітки (1) з біортогональними елементами, складові яких настроєні на прийом вертикально (2) й горизонтально (3) поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів (11), які пов'язані зі складовими антенних елементів вертикальної і горизонтальної поляризації відповідно, та входять до складу вертикального (5) і горизонтального (6) компенсаційних каналів просторової обробки сигналів, що на вході обладнані формувачами діаграм спрямованості (9); виходи просторових компенсаційних каналів підключені до входів двокомпонентного поляризаційного адаптивного фільтра (16), яка відрізняється тим, що обидва просторових адаптивних фільтри побудовані за однаковою структурою на основі блока трансверсальних фільтрів (12) за схемою із частковою адаптацією, коли з усіх складових горизонтальної чи вертикальної поляризації біортогональних антенних елементів синтезується відповідний основний гостроспрямований канал прийому, а із частини складових елементів тієї же антенної решітки виділяються компенсаційні підканали, що об'єднуються в канал просторової обробки сигналів з відповідною поляризацією; а формувачі діаграм спрямованості компенсаційних каналів побудовані за схемою так, що сигнал на кожному їх виході формується частиною компенсаційних підканалів, причому число їх виходів менше числа компенсаційних підканалів на його вході на задане число напрямків виключень, а їх вагові коефіцієнти підстроюються згідно з законом сканування променя ДС відповідного основного каналу прийому; двокомпонентний поляризаційний фільтр, компоненти якого мають спільні входи, причому в першій компоненті сигнал на виході вертикального компенсаційного каналу підсумовується з урахуванням вагового коефіцієнта (17) з сигналом на виході компенсаційного горизонтального каналу, а у другій - навпаки, сумарний сигнал з виходів цих компонент з урахуванням нормування формує вихідний сигнал системи; для формування вагових коефіцієнтів адаптивних фільтрів при вирішенні рівняння Вінера-Хопфа використовується метод ортогоналізації рядків навчаючого пакета згідно з процедурою модифікованого алгоритму Грама-Шмідта.
Текст
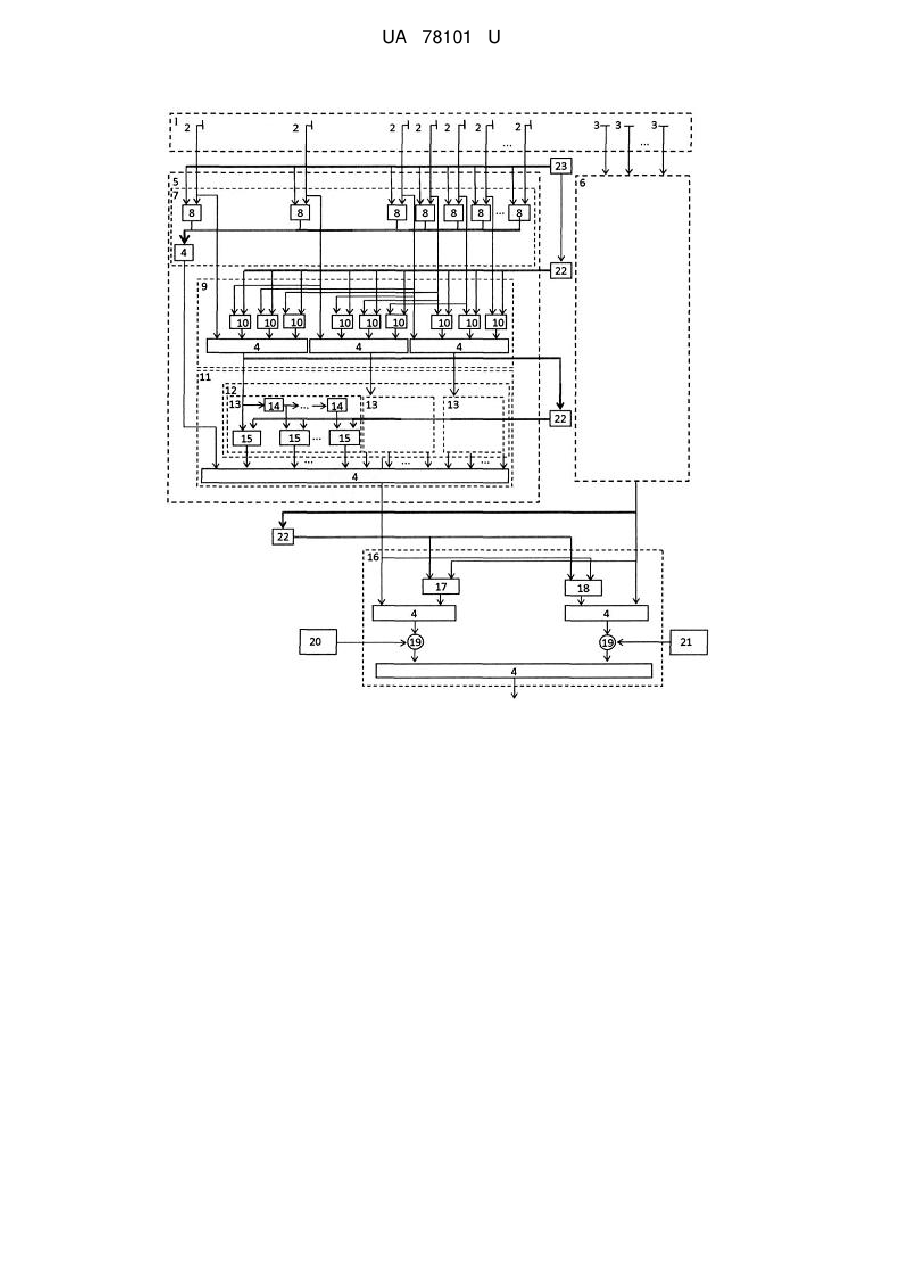
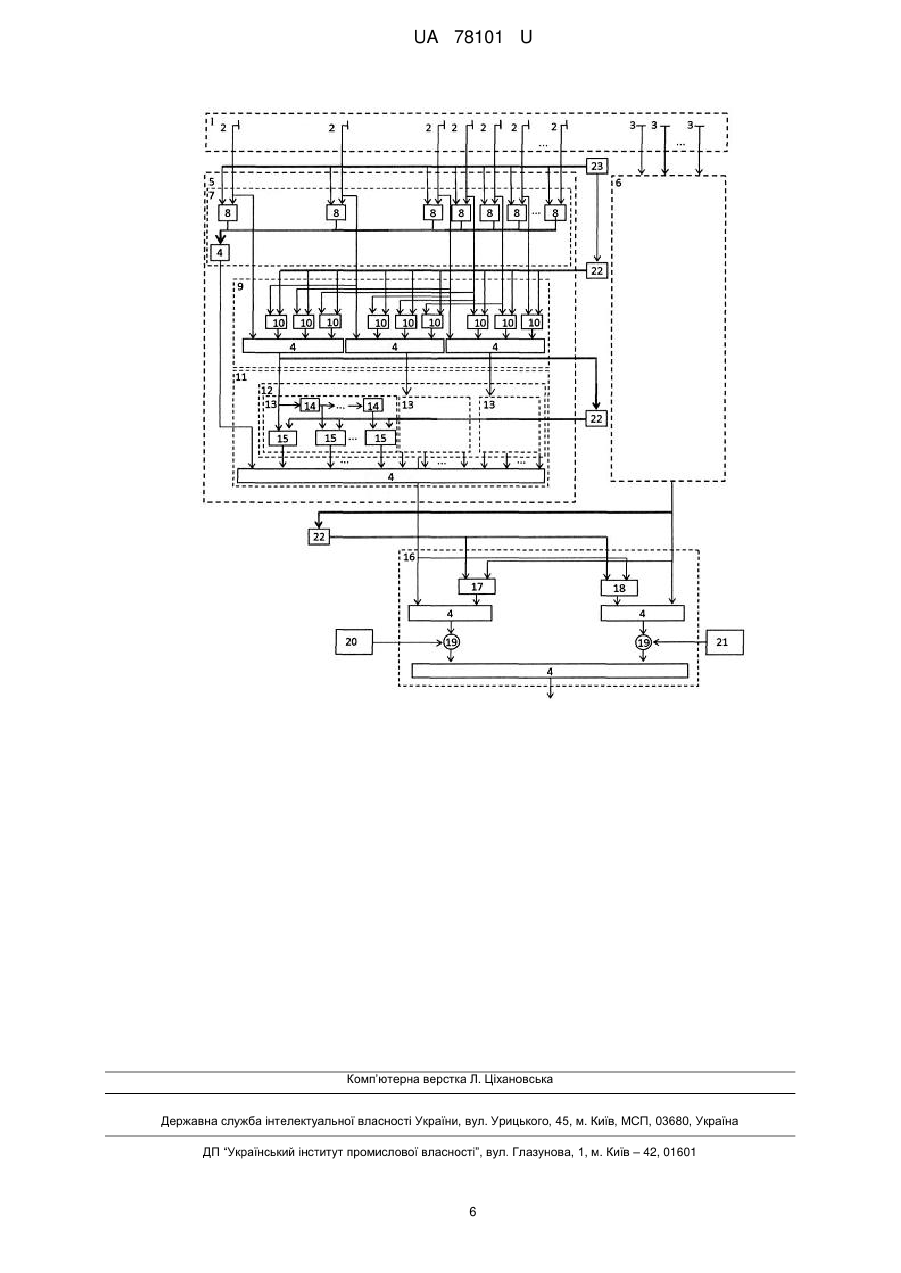
Реферат: Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою складається: з цифрової антенної решітки (1) з біортогональними елементами, складові яких настроєні на прийом вертикально (2) й горизонтально (3) поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів (11), які пов'язані зі складовими антенних елементів вертикальної і горизонтальної поляризації відповідно, та входять до складу вертикального (5) і горизонтального (6) компенсаційних каналів просторової обробки сигналів, що на вході обладнані формувачами діаграм спрямованості (9); виходи просторових компенсаційних каналів підключені до входів двокомпонентного поляризаційного адаптивного фільтра (16). Обидва просторових адаптивних фільтри побудовані за однаковою структурою на основі блока трансверсальних фільтрів (12) за схемою із частковою адаптацією, коли з усіх складових горизонтальної чи вертикальної поляризації біортогональних антенних елементів синтезується відповідний основний гостроспрямований канал прийому, а із частини складових елементів тієї же антенної решітки виділяються компенсаційні підканали, що об'єднуються в канал просторової обробки сигналів з відповідною поляризацією. UA 78101 U (54) АДАПТИВНА СИСТЕМА ЗАХИСТУ КОРАБЕЛЬНИХ РАДІОЛОКАЦІЙНИХ СТАНЦІЙ ВИЯВЛЕННЯ ПОВІТРЯНИХ ЦІЛЕЙ ВІД АКТИВНИХ ШУМОВИХ ЗАВАД З ПОВІЛЬНОЮ ПРОСТОРОВОПОЛЯРИЗАЦІЙНОЮ СТРУКТУРОЮ UA 78101 U UA 78101 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі радіолокації, зокрема, до засобів для захисту від завад, а саме, до пристроїв компенсації активних шумових завад з довільними просторовим та часовим спектрами та різною регулярною поляризаційною структурою. Відомий пристрій для адаптивної системи захисту корабельних радіолокаційних станцій (РЛС) виявлення повітряних цілей від активних шумових завад з повільною просторовополяризаційною структурою є адаптивний просторово-поляризаційний фільтр, що містить антенну систему з ортогональними елементами, складові яких налаштовані на приймання вертикально й горизонтально поляризованих електромагнітних хвиль відповідно, блок вагових коефіцієнтів; суматор і блок управління [1]. Робота відомого пристрою, полягає у наступному: електромагнітні коливання, що приймаються кожним з ортогональних елементів антенної системи, подаються до блока вагових коефіцієнтів, де здійснюється комплексне зважування вхідних сигналів, що рознесені по простору та поляризації, потім всі отримані сигнали підсумовуються на загальному суматорі. Отриманий сигнал поступає до блока управління, у якому здійснюється підстроювання вагових коефіцієнтів за рекурентними алгоритмами. До недоліків адаптивного просторово-поляризаційного фільтра належить те, що застосування нефакторизованного комбінованого зважування вхідних напруг з наступною обробкою на єдиному суматорі, приводить до того, що можливості придушення завад діючих в області головної пелюстки діаграми спрямованості (ДС) основного каналу прийому обмежені; не передбачені способи оптимального придушення активних широкосмугових перешкод в області бокових пелюсток діаграми спрямованості основного каналу прийому; для розрахунку вагових коефіцієнтів при рішенні рівнянь Вінера-Хопфа застосовуються рекурентні алгоритми, що визначаються низкою обчислювальною стійкістю й великий періодом збіжності. Найбільш близьким технічним рішенням, вибраним за прототип адаптивної системи захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою, є пристрій компенсації активних шумових завад, який містить антенну систему з біортогональними елементами, складові яких настроєні на прийом вертикально й горизонтально поляризованих електромагнітних хвиль відповідно; просторові автокомпенсатори, що утворюють вертикальний і горизонтальний компенсаційні канали просторової обробки сигналів, на вході просторових авто компенсаторів включені формувачі діаграм спрямованості компенсаційних каналів (ФДСКК); виходи каналів просторової обробки сигналів підключені до входів поляризаційного адаптивного фільтра [2]. Працює пристрій таким чином. Адитивна суміш корисного сигналу і активної шумової завади з виходів елементів антенної системи одночасно поступає на два канали просторової обробки сигналів. Попередній підбір вагових коефіцієнтів ФДСКК дозволяє сформувати такий амплітудно-фазовий розподіл сигналів на розкриві антени, для кожного каналу, що вони мають діаграми спрямованості з провалами в зоні, яка відповідає головному пелюстку діаграми спрямованості основних каналів (антени радіолокаційної станції виявлення повітряних цілей, що захищається від активних шумових завад). Таким чином виключається компенсація корисного сигналу в просторових автокомпенсаторів та вплив завад напрямки на джерела, яких суміщені з напрямком приходу корисного сигналу на підстроювання їх вагових коефіцієнтів. Ці умови забезпечують поляризаційну селекцію корисного сигналу на виході загального суматора. Канали утворюють просторові автокомпенсатори, в яких забезпечується автокомпенсація активних шумових завад і виділення корисних сигналів, які діють з різних напрямів. Просторові автокомпенсатори мають у своєму складі підканали зі кореляційними зворотними ланцюгами, що забезпечують підстроювання вагових коефіцієнтів за рекурентними алгоритмами. Якщо корисний сигнал і активна завада діють з одного напряму, але мають різну поляризацію, то поляризаційний автокомпенсатор компенсує заваду за критерієм мінімуму потужності на своєму виході. Сигнал, що має поляризацію, відмінну від завади, підсумовується з урахуванням фаз, залежних від поляризації сигналу, і виділяється на виході пристрою. До недоліків технічного рішення, вибраного за прототип, належить неможливість формувачів діаграм спрямованості компенсаційних каналів створювати провал в ДС компенсаційних каналів в області кутових координат, іншої ніж заздалегідь встановленої при виготовленні виробу; не передбачені способи оптимального придушення активних широкосмугових перешкод в області бічних пелюсток діаграми спрямованості основного каналу прийому; для розрахунку вагових коефіцієнтів при рішенні рівнянь Вінера-Хопфа застосовуються рекурентні алгоритми, що визначаються невеликою обчислювальною стійкістю й більшим періодом збіжності; неоптимальна робота одноканального поляризаційного автокомпенсатора в умовах деполяризації прийнятого відбитого від цілі сигналу. 1 UA 78101 U 5 10 15 20 25 30 35 40 45 50 55 60 В основу корисної моделі, що пропонується, поставлено задачу шляхом розробки адаптивного фільтра, що реалізує оптимальну комбіновану просторово-поляризаційну обробку сигналів, забезпечити задані тактико-технічні характеристики радіолокаційної станції з цифровою антенною решіткою виявлення повітряних цілей в умовах впливу активних шумових завад з довільними просторовим та часовим спектрами та різною регулярною поляризаційною структурою. Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою, що пропонується, складається з цифрової антенної решітки з біортогональними елементами, складові яких настроєні на прийом вертикально й горизонтально поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів, які пов'язані з складовими антенних елементів вертикальної і горизонтальної поляризації відповідно, які утворюють вертикальний і горизонтальний компенсаційні канали просторової обробки сигналів, що на вході обладнані формувачами діаграм спрямованості; виходи просторових компенсаційних каналів підключені до входів двокомпонентного поляризаційного адаптивного фільтра. Поставлена задача вирішується тим, що обидва просторових адаптивних фільтри побудовані за однаковою структурою на основі блока трансверсальних фільтрів за схемою із частковою адаптацією, коли з усіх складових горизонтальної чи вертикальної поляризації біортогональних антенних елементів синтезується відповідний основний гостроспрямованій канал прийому, а із частини складових елементів тієї же антенної решітки виділяються компенсаційні підканали, що об'єднаються в канал просторової обробки сигналів з відповідною поляризацією, а формувачі діаграм спрямованості компенсаційних каналів побудовані за схемою так, що сигнал на кожному їх виході формується частиною компенсаційних підканалів, причому число їх виходів менше числа компенсаційних підканалів на його вході на задане число напрямків виключень, а їх вагові коефіцієнти підстроюються згідно з законом сканування променя ДС відповідного основного каналу прийому; двокомпонентний поляризаційний фільтр, компоненти якого мають спільні входи, причому в першій компоненті сигнал на виході вертикального компенсаційного каналу підсумовується з урахуванням вагового коефіцієнта з сигналом на виході компенсаційного горизонтального каналу, а у другій - навпаки, сумарний сигнал з виходів цих компонент з урахуванням нормування формує вихідний сигнал системи; для формування вагових коефіцієнтів адаптивних фільтрів при вирішенні рівняння ВінераХопфа використовується метод ортогоналізації рядків навчаючого пакету згідно з процедурою модифікованого алгоритму Грама-Шмідта. Суть корисної моделі пояснюється кресленням, де на кресл. наведені функціональна схема запропонованого пристрою. Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою, яка містить: 1 - цифрову антенну решітку (ЦАР) РЛС виявлення повітряних цілей з елементами, що настроєні на прийом горизонтально 2, та вертикально 3 поляризованих електромагнітних хвиль; 4 - суматори; 5 та 6 - вертикальний та горизонтальний компенсаційні канали просторової обробки сигналів, кожний канал у складі: діаграмоутворюючої схеми 7 з помножувачами на вагові коефіцієнти 8, пристрою формування діаграм спрямованості компенсаційних каналів 9 з помножувачами на вагові коефіцієнти 10, просторового адаптивного фільтру 11, з блоком трансверсальних фільтрів 12, складові якого 13 включають до себе елементи лінії затримки на один період дискретизації 14 та помножувачі на вагові коефіцієнти просторового адаптивного фільтру 15; 16 - поляризаційний адаптивний фільтр у складі: помножувачів на вагові коефіцієнти 17, 18, помножувачів сигналів 19, обчислювачів значень очікуваного сигналу в каналі обробці сигналів, що настроєні на обробку вертикально 20 та горизонтально 21 поляризованих електромагнітних коливань; 22 - обчислювальний пристрой для формування управляючих сигналів, що підстроюють вагові коефіцієнти ФДСКК та адаптивних фільтрів; 23 блок електронного сканування ДС. Схема на кресл. наведена для варіанта побудови: - число елементів антенної решітки РЛС - N; - число компенсаційних каналів - 6; - число направлень виключення пристрою формування діаграм спрямованості компенсаційних каналів - 3; - число каналів в лінії затримки трансверсального фільтра - L. Подвійної стрілкою позначена шина даних, що отримані з декілька виходів блоків системи, що пропонується. 2 UA 78101 U 5 10 15 20 25 30 35 Адаптивна система захисту корабельних РЛС виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою, працює таким чином. Діаграмоутворююча схема забезпечує: дискретизацію адитивної суміші корисного сигналу й активних завад, що прийнята елементами ЦАР з визначеною дискретністю за часом; синтез двох основних гостроспрямованих каналів прийому, що мають високий коефіцієнт спрямованої дії (КСД) з обробкою вертикально й горизонтально поляризованих електромагнітних хвиль відповідно; електронне сканування променя діаграми спрямованості відповідних основних каналів прийому, а також виділення компенсаційних підканалів, що об'єднаються в канал просторової обробки сигналів з відповідної поляризацією. Основні канали прийому призначені для прийому корисних (відбитих від об'єктів, що лоціюються) сигналів. Діаграми спрямованості компенсаційних підканалів перекриваються й мають невеликі КСД. Блок електронного сканування ДС у відповідності до закону сканування променя діаграми спрямованості основних каналів прийому формує управляючі сигнали на підстроювання вагових коефіцієнтів діаграмоутворюючої схеми та розрахунок вагових коефіцієнтів ФДСКК. Дискретизована за часом реалізація електромагнітних коливань, що прийнята елементами ЦАР, які виконують функції компенсаційних підканалів надходить до ФДСКК. На підставі інформації про напрямок головного максимуму ДС основного каналу прийму, що надається з БС в обчислювальному пристрої розраховуються управляючі сигнали на підстроювання вагових коефіцієнтів ФДСКК, для забезпечення умов створення провалів в областях кутових координат, що відповідають головним пелюсткам діаграм спрямованості відповідних основних каналів прийому сигналів, необхідного для забезпечення умов оптимальної факторизації просторової й поляризаційної обробки. Наслідком вищевказаного, завади, що діють в головні пелюстки ДС основних каналів прийому на подальше настроювання адаптивних вагових коефіцієнтів просторових адаптивних фільтрів не впливають, що відповідає умовам факторизації просторової та поляризаційної обробки сигналів. Структуру та алгоритм роботи ФДСКК можливо розробити з наступних міркувань. Для забезпечення необхідного сумарного провалу ДС компенсаційних каналів в області кутових координат, відповідної головним пелюсткам ДС каналів просторовій обробки сигналів необхідно забезпечити умови формування провалів ДС у декількох напрямків виключень, значення яких будуть належати цієї області. Розрахунки показали, що достатнє задати три напрямку виключення, значення одного повинне співпадати з напрямком головних "нулів" ДС основних каналів, а останні симетрично відносно нього. Забезпечення заданих умов досягається за рахунок вагового зважування сигналів з виходу компенсаційних підканалів відповідних каналів просторової обробки сигналів у ФДСКК. Математичний запис описаної процедури буде мати вигляд: QU 0 , (1) U Фt, 1Фt, i Фt, Ni - матриця напрямків виключення розмірністю Nm Ni Ni Nm ; Фt, i - вектор комплексних амплітуд сигналу, що знімається з 1Nm елементів ЦАР, що використовуються як компенсаційні підканали для 7-ого напрямку виключення розмірністю Nm 1 ; 0 - нульовий вектор розмірністю Nm 1 ]. З виразу (1) визначаються розмірність та структура матриці Q . У відповідності до правил алгебраїчних дій з матрицями число стовбців матриці Q повинно бути рівним числу строк матриці U тобто Nm . Вираз (1) відповідає умовам ортогональності рядків матриці Q стовбцям матриці U . де 40 45 Розмірність простору RKK , в якому визначені стовбці матриці U та рядки матриці Q рівна Nm по числу ступенів вільності векторів Фt, i . Розмірність підпростору RU RKK , в якому визначені вектори Фt, i рівна Ni (по числу стовбців матриці U ). Згідно з основними положеннями лінійної алгебри розмірність підпростору векторів, що не є лінійною комбінацією 50 один одного RQ RQ RKK ортогональних векторам підпростору RKK рівна Nm Ni . Якщо розмірність підпростору RKK буде більш Nm Ni , то решта частина векторів, буде лінійною комбінацією Nm Ni векторів. Звідси число рядків матриці Q рівно Nm Ni . Структуру рядків матриці Q можливо визначити із наступних розумінь. 3 UA 78101 U Добуток будь-якого рядка матриці Q на матрицю U дає систему з Ni лінійних рівнянь. Умовою існування єдиного рішення системи лінійних рівнянь (СЛР) є відповідність числа рівнянь числу невідомих. Структуру СЛР можна записати в матричному вигляді: A X B, (2) 5 10 де A - матриця коефіцієнтів при невідомих; X - вектор невідомих (вектор коефіцієнтів ФДСКК); B - вектор вільних членів. З урахуванням сказаного кількість невідомих коефіцієнтів Q -фільтра повинне бути рівним Ni . Число невідомих більше ніж Ni не відповідає умовам існування єдиного рішення СЛР. Для формування вектора вільних членів необхідно існування Ni 1 коефіцієнта ФДСКК рівного одиниці. З урахуванням сказаного інші Nm Ni 1 елементи рядка матриці Q дорівнюються нулю. Аналітичне вираження перетворення, що описують процедуру, схемою можна представити як: 15 1 1,2 0 1 Q 0 0 1,3 1,Ni1 2,3 2,Ni1 2,Ni 2 0 0 0 0 , 1 y,N 0 0 0 0 (3) де i, j - вагові коефіцієнти, i 1Nm Ni, j 1Nm,Ni - число напрямків виключення. 20 25 30 35 40 45 50 Вагові коефіцієнти ФДСКК визначаються шляхом рішення Nm Ni систем з Ni лінійними рівняннями з Ni невідомими. З виходів ФДСКК перетворені дискрети сигналу надходять до обчислювального пристрою та просторових каналів обробки на вхід блоків трансверсальних фільтрів. В обчислювальному пристрої розраховуються управляючі сигнали на підстроювання вагових коефіцієнтів просторових каналів обробки сигналів. Вагові коефіцієнти просторових адаптивних фільтрів розраховуються шляхом рішення рівняння Вінера-Хопфа. З декількох знятих дискретів сигналу формується навчаючий пакет. Для безпосереднього знаходження оцінки зворотної кореляційної матриці цьому рівняння використовується алгоритм ортогоналізації рядків навчаючого пакету за модифікованим методом Грама-Шмідта. Отримані на підставі рішення рівняння Вінера-Хопфа управляючі сигнали з обчислювального пристрою поступають до помножувачів на вагові коефіцієнти відповідних просторових каналів обробки сигналів. У просторових каналах обробки сигналів на виході блоків трансверсальних фільтрів сигнали компенсаційних каналів обробки вертикально й горизонтально поляризованих електромагнітних хвиль комбінованої системи з урахуванням вагових коефіцієнтів підсумовуються із сигналами відповідних основних каналів прийому, що рівнозначно формуванню результуючої діаграми спрямованості із провалами в напрямках на джерела завад. При цьому корисний сигнал і завада діючі в головну пелюстку діаграми спрямованості ЦАР у настроюванні вагових коефіцієнтів просторових адаптивних фільтрів не беруть участь і без викривлень попадають для подальшої обробки в двокомпонентний поляризаційний адаптивний фільтр (ПлАФ). У ПлАФ з використанням відмінності в поляризаційних параметрах корисного сигналу та завад відбувається селекція відбитого від цілі сигналу на фоні активної шумової завади, напрямок на джерело якої збігається з напрямком на ціль. Управляючі сигнали на підстроювання вагових коефіцієнтів ПлАФ розраховуються в обчислювальному пристрої на підставі значень сигналів з виходу просторових каналів обробки сигналів та надходять до помножувачів на вагові коефіцієнти ПлАФ. За рахунок застосування двох компонент у складі ПлАФ які мають спільні входи, причому в першій компоненті сигнал на виході вертикального компенсаційного каналу підсумовується з урахуванням вагового коефіцієнта з сигналом на виході компенсаційного горизонтального каналу, а у другій - навпаки, та виконання нормування сигналів на їх виході досягається зменшення впливу ефекту деполяризації прийнятого відбитого від цілі сигналу в порівнянні з випромененим на ефективність рішення задачі виявлення цілі радіолокаційною станцією повітряного спостереження. Підвищення ефективності застосування технічного рішення, яке заявляється, у порівнянні з прототипом, полягає в тому, що, запропонована структура та алгоритм розрахунку вагових 4 UA 78101 U 5 10 15 20 коефіцієнтів ФДСКК потребує виділення невеликого об'єму обчислювальних ресурсів для їх формування і оптимізовані для використання в складі цифрових антенних решітках з електронним скануванням променя ДС відповідних основних каналів прийому; пропонована схема побудови просторових адаптивних фільтрів на основі блоків трансверсальних фільтрів дозволяє ефективно приглушувати активні широкосмугові перешкоди в області бічних пелюсток діаграми спрямованості основного каналу прийому, а використання структури із частковою адаптацією дозволяє використовувати невеликий обсяг обчислювальної потужності необхідної для розрахунку вагових коефіцієнтів просторової частини; для формування вагових коефіцієнтів при рішенні рівнянь Вінера-Хопфа застосовується метод ортогоналізації рядків навчального пакета згідно з процедурою модифікованого алгоритму Грама-Шмидта, що має високу обчислювальну стійкість й швидкодію в порівнянні з рекурентними алгоритмами; застосування двоканального адаптивного поляризаційного фільтра дозволяє зменшити вплив ефекту деполяризації прийнятого відбитого від цілі сигналу в порівнянні з випромененим на ефективність рішення задачі виявлення цілі радіолокаційною станцією повітряного спостереження. Джерела інформації: 1. Е.Ф. Каменев, Н.Е. Кириллов, Н.И. Кобин и др. Методы обработки сигналов при наличии помех в линях связи. - М.: Радио и связь, 1985. - C. 138-139-аналог. 2. Пристрій адаптивної компенсації активних шумових завад: Деклараційний патент на винахід № 69127А.Україна, МПК 7G01S7/36 А.В. Головань-№ 20031211187; Заявл. 8.12.03; Опубл. 16.08.04, Бюл. № 8.-8 с - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою, яка складається: з цифрової антенної решітки (1) з біортогональними елементами, складові яких настроєні на прийом вертикально (2) й горизонтально (3) поляризованих електромагнітних хвиль відповідно; двох просторових адаптивних фільтрів (11), які пов'язані зі складовими антенних елементів вертикальної і горизонтальної поляризації відповідно, та входять до складу вертикального (5) і горизонтального (6) компенсаційних каналів просторової обробки сигналів, що на вході обладнані формувачами діаграм спрямованості (9); виходи просторових компенсаційних каналів підключені до входів двокомпонентного поляризаційного адаптивного фільтра (16), яка відрізняється тим, що обидва просторових адаптивних фільтри побудовані за однаковою структурою на основі блока трансверсальних фільтрів (12) за схемою із частковою адаптацією, коли з усіх складових горизонтальної чи вертикальної поляризації біортогональних антенних елементів синтезується відповідний основний гостроспрямований канал прийому, а із частини складових елементів тієї же антенної решітки виділяються компенсаційні підканали, що об'єднуються в канал просторової обробки сигналів з відповідною поляризацією; а формувачі діаграм спрямованості компенсаційних каналів побудовані за схемою так, що сигнал на кожному їх виході формується частиною компенсаційних підканалів, причому число їх виходів менше числа компенсаційних підканалів на його вході на задане число напрямків виключень, а їх вагові коефіцієнти підстроюються згідно з законом сканування променя ДС відповідного основного каналу прийому; двокомпонентний поляризаційний фільтр, компоненти якого мають спільні входи, причому в першій компоненті сигнал на виході вертикального компенсаційного каналу підсумовується з урахуванням вагового коефіцієнта (17) з сигналом на виході компенсаційного горизонтального каналу, а у другій - навпаки, сумарний сигнал з виходів цих компонент з урахуванням нормування формує вихідний сигнал системи; для формування вагових коефіцієнтів адаптивних фільтрів при вирішенні рівняння Вінера-Хопфа використовується метод ортогоналізації рядків навчаючого пакета згідно з процедурою модифікованого алгоритму Грама-Шмідта. 5 UA 78101 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive system for protection of ship radar stations for reveal of airborne targets against noise interference with slow spatial-polarization structure
Автори англійськоюKharlanov Oleksii Volodymyrovych, Popovnin Yurii Mykhailovych
Назва патенту російськоюАдаптивная система защиты корабельных радиолокационных станций выявления воздушных целей от активных шумовых помех с медленной пространственно-поляризационной структурой
Автори російськоюХарланов Алексей Владимирович, Поповнин Юрий Михайлович
МПК / Мітки
МПК: G01S 7/36
Мітки: радіолокаційних, структурою, просторово-поляризаційною, корабельних, адаптивна, станцій, шумових, захисту, завад, повільною, активних, повітряних, виявлення, система, цілей
Код посилання
<a href="https://ua.patents.su/8-78101-adaptivna-sistema-zakhistu-korabelnikh-radiolokacijjnikh-stancijj-viyavlennya-povitryanikh-cilejj-vid-aktivnikh-shumovikh-zavad-z-povilnoyu-prostorovo-polyarizacijjnoyu-strukturoyu.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система захисту корабельних радіолокаційних станцій виявлення повітряних цілей від активних шумових завад з повільною просторово-поляризаційною структурою</a>
Пристрій адаптивної компенсації активних шумових завад
Номер патенту: 69127
Опубліковано: 16.08.2004
Автор: Головань Артур Вячеславович
МПК: G01S 7/36
Мітки: компенсації, адаптивної, шумових, завад, пристрій, активних
Формула / Реферат:
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а...
Пристрій компенсації активних шумових завад
Номер патенту: 37868
Опубліковано: 15.12.2003
Автори: Мокеєв Юрій Геннадійович, Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Падалко Віктор Григорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Лаврентьєв Володимир Миколайович, Мирошниченко Михайло Іванович, Траілін Вячеслав Федорович
МПК: G01S 7/36
Мітки: завад, шумових, компенсації, активних, пристрій
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок помноження, блок віднімання, причому вихід лінії затримки додаткового каналу сполучений із першим входом блока помноження, вихід якого сполучений із першим входом блока віднімання, другий вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Геннадійович, Попов Олег Якович, Мирошниченко Михайло Іванович, Лаврентьєв Володимир Миколайович, Луханін Михайло Іванович, Немчин Олександр Федорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович
МПК: G01S 7/36
Мітки: завад, пристрій, компенсації, активних, шумових
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Пристрій компенсації активних шумових завад
Номер патенту: 19765
Опубліковано: 15.12.2006
Автори: Каспирович Олександр Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович
МПК: G01S 7/36
Мітки: завад, активних, шумових, пристрій, компенсації
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою компенсації активних шумових завад і підключені відповідно до основного і додаткового входів блока обчислення вагових коефіцієнтів, вихід лінії...
Пристрій для захисту від активних завад
Номер патенту: 19475
Опубліковано: 15.12.2006
Автори: Громаковський Володимир Васильович, Піза Дмитро Макарович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ
МПК: G01S 1/00
Мітки: захисту, активних, пристрій, завад
Формула / Реферат:
Пристрій для захисту від активних завад, що містить гостронаправлену антену, допоміжну ненаправлену антену, основний і компенсаційний канали прийому, блок автокомпенсатора, перший вхід якого з'єднаний з виходом приймача основного каналу прийому, другий вхід автокомпенсатора з'єднаний через підсилювальний блок з виходом приймача компенсаційного каналу прийому, який відрізняється тим, що в каналах прийому введені блок нормування вхідного...
Попередній патент: Спосіб корекції порушень функції нирок у хворих з хронічним обструктивним захворюванням легень
Наступний патент: Спосіб зневоднення етанолу
Випадковий патент: Діагностикум для виявлення шкірних паразитів - збудників демодекозу