Система та спосіб для визначення положення й перекосу вантажозахватного пристрою крана




Формула / Реферат
1. Система для визначення горизонтального положення (x_spr, y_spr) і перекосу (skew) вантажозахватного пристрою (2) крана (10), яка відрізняється тим, що вона містить:
просторові відбивачі (5, 6) щонайменше двох типів, які розташовані на вантажозахватному пристрої (2) і мають відомі відносні положення і форми, при цьому верхня сторона відбивачів (5, 6) містить щонайменше одну поверхню, нахилену щодо горизонтальної площини, а бічний профіль відбивачів (5, 6) має, наприклад, трикутну або клиноподібну форму, якщо дивитися на нього в поперечному напрямку;
щонайменше один сканувальний датчик (7) відстаней, встановлений на крані (10) і виконаний з можливістю вимірювання відстані (R) і напрямку (а) від крана (10) до відбивачів (5, 6);
пристрій (13) обробки даних, виконаний з можливістю:
зберігати в своїй пам'яті дані про відносні положення й форми відбивачів (5, 6); та
визначати горизонтальне положення (x_spr, y_spr) і перекіс (skew) вантажозахватного пристрою (2) на основі щонайменше даних про відносні положення й просторові форми відбивачів (5, 6) і вимірюваних відстаней (R) і напрямків (а) від крана (10) до відбивачів (5, 6).
2. Система за п. 1, яка відрізняється тим, що вона виконана також з можливістю визначення висоти (h) і/або поздовжнього нахилу (trim) вантажозахватного пристрою (2).
3. Система за п. 1 або п. 2, яка відрізняється тим, що на крані (10) установлений один сканувальний датчик (7) відстаней.
4. Система за будь-яким із пп. 1-3, яка відрізняється тим, що відбивач (6) одного типу призначений для визначення поздовжнього положення (y_spr) вантажозахватного пристрою (2), причому основою для позиціонування відбивача (6) є його форма.
5. Система за п. 4, яка відрізняється тим, що відбивач (5) іншого типу призначений для визначення бічного положення (x_spr) і перекосу (skew) вантажозахватного пристрою, причому основою для позиціонування відбивачів (5) є інформація про відносне розташування відбивачів (5, 6).
6. Система за будь-яким із пп. 1-5, яка відрізняється тим, що датчик (7) відстаней є лазерним датчиком.
7. Система за будь-яким із пп. 1-6, яка відрізняється тим, що вона виконана з можливістю автоматичного керування краном (10).
8. Система за будь-яким із пп. 1-7, яка відрізняється тим, що кран (10) виконаний з можливістю переміщення без участі оператора.
9. Система за будь-яким із пп. 1-8, яка відрізняється тим, що кран (10) є контейнерним краном, а вантажозахватний пристрій (2) являє собою контейнерний захват.
10. Спосіб визначення горизонтального положення (x_spr, y_spr) і перекосу (skew) вантажозахватного пристрою (2) крана (10), який відрізняється тим, що в ньому використовують:
просторові відбивачі (5, 6) щонайменше двох типів, які розташовані на вантажозахватному пристрої (2) і мають відомі відносні положення і форми, при цьому верхня сторона відбивачів (5, 6) містить щонайменше одну поверхню, нахилену щодо горизонтальної площини, а бічний профіль відбивачів (5, 6) має, наприклад, трикутну або клиноподібну форму, якщо дивитися на нього в поперечному напрямку;
щонайменше один сканувальний датчик (7) відстаней, встановлений на крані (10) і виконаний з можливістю виміру відстані (R) і напрямку (а) від крана (10) до відбивачів (5, 6);
і пристрій (13) обробки даних, що виконує наступні етапи:
приймає від зазначеного датчика (7) дані про відстані (R) і напрямки (а) від крана до відбивачів (5, 6);
зберігає в пам'яті дані про відносні положення й форми відбивачів (5, 6);
визначає горизонтальне положення (x_spr, y_spr) і перекіс (skew) вантажозахватного пристрою (2) на основі щонайменше даних про відносні положення й просторові форми відбивачів (5, 6) і вимірюваних відстаней (R) і напрямків (а) від крана (10) до відбивачів (5, 6).
11. Спосіб за п. 10, який відрізняється тим, що включає також етап визначення висоти (h) і/або поздовжнього нахилу (trim) вантажозахватного пристрою (2).
12. Спосіб за п. 10 або п. 11, який відрізняється тим, що в ньому використовують один сканувальний датчик (7) відстаней, встановлений на крані (10).
13. Спосіб за будь-яким із пп. 11-12, який відрізняється тим, що відбивач (6) одного типу використовують для визначення поздовжнього положення (y_spr) вантажозахватного пристрою (2), причому основою для позиціонування відбивача (6) є його форма.
14. Спосіб за п. 13, який відрізняється тим, що відбивач (5) іншого типу використовують для визначення бічного положення (x_spr) і перекосу (skew) вантажозахватного пристрою, причому основою для позиціонування відбивачів (5) є інформація про відносне розташування відбивачів (5, 6).
15. Спосіб за будь-яким із пп. 11-14, який відрізняється тим, що використовують лазерний датчик, як зазначений датчик (7) відстаней.
16. Спосіб за будь-яким із пп. 11-15, який відрізняється тим, що керування краном (10) здійснюють автоматично.
17. Спосіб за будь-яким із пп. 11-16, який відрізняється тим, що кран (10) переміщують без участі оператора.
18. Спосіб за будь-яким із пп. 11-17, який відрізняється тим, що кран (10) є контейнерним краном, а вантажозахватний пристрій (2) являє собою контейнерний захват.
Текст
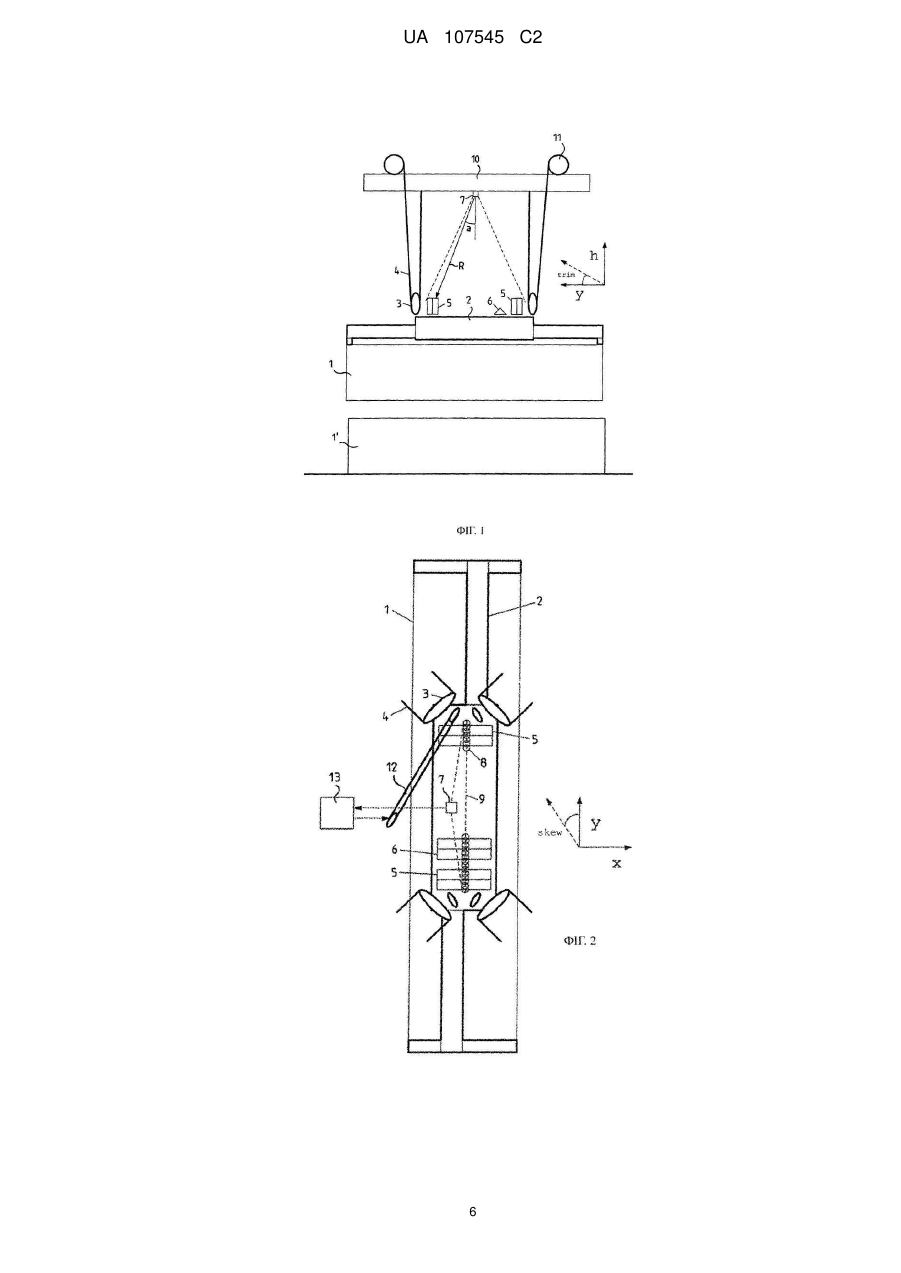
Реферат: Винахід стосується системи й способу для визначення горизонтального положення й перекосу вантажозахватного пристрою (2) крана. Система містить відбивачі (5, 6) щонайменше двох типів, які розташовані на вантажозахватному пристрої (2) і мають відомі відносні положення і форми; щонайменше один сканувальний датчик (7) відстаней, установлений на крані (10) для вимірювання відстані (R) і напрямку (а) від крана до відбивачів; і пристрій обробки даних, виконаний з можливістю зберігання в його пам'яті даних про відносні положення й форми відбивачів і визначення горизонтального положення й перекосу вантажозахватного пристрою (2) на основі щонайменше даних про відносні положення й просторові форми відбивачів, а також вимірюваних відстаней і напрямків від крана до відбивачів. UA 107545 C2 (12) UA 107545 C2 UA 107545 C2 5 10 15 20 25 30 35 40 45 50 55 Область техніки Даний винахід стосується системи й способу для визначення горизонтального положення й перекосу вантажозахватного пристрою крана. У контексті даного винаходу термін "кран" стосується механізму, виконаного з можливістю підйому й переміщення вантажів (наприклад, контейнерів) при керуванні оператором або автоматикою. Конкретним застосуванням винаходу є позиціонування вантажозахватного пристрою - захвата контейнерного крана. Рівень техніки Більшість міжнародних операцій по перевезенню товарів здійснюється за допомогою контейнерів 1. Контейнер - це тара стандартної форми, у яку пакуються вантажі на час їхнього транспортування. Звичайно застосовуються контейнери трьох типорозмірів, довжиною 20 футів (6,096 м), 40 футів (12,192 м) і 45 футів (13,716 м). Ширина контейнера становить приблизно 2,5 м. Перевантаження контейнерів виконують на контейнерних терміналах (або в портах, або усередині країни) за допомогою особливих контейнерних кранів, у число яких входять козлові крани на рейках і козлові крани на гумових шинах. Зокрема, до козлових кранів на рейках належить причальний кран-перевантажувач, використовуваний для підйому контейнерів, які вивантажуються із судна на причал, і, відповідно, для навантаження доставлених на причал контейнерів на борт контейнеровоза. Щоб можна було маніпулювати контейнерами, на контейнерному крані звичайно встановлюють контейнерний захват, призначений для зачепа й підйому контейнера. Довжину контейнерного захвата можна змінювати відповідно до довжини оброблюваного контейнера. Завдання даного винаходу полягає в автоматизації контейнерних кранів таким чином, щоб полегшити й прискорити роботу оператора контейнерного крана, або щоб оператора можна було повністю видалити з машини, що здійснює навантаження й вивантаження контейнерів, яка в такому випадку буде працювати без обслуговуючого персоналу, тобто автоматично. Якщо завдання полягає в полегшенні роботи оператора, то тоді, як правило, деяка робоча фаза в робочому циклі повинна виконуватися автоматично, з керуванням від комп'ютера. Отже, поставлена задача полягає в прискоренні цієї робочої фази зі збільшенням точності, надійності або безпеки, або просто, щоб полегшити працю оператора. Якщо оператор повністю видаляється з кабіни керування машиною, що здійснює навантаження й вивантаження контейнерів, і ця машина працює без обслуговуючого персоналу, то значна частина робочих фаз машини виконується автоматично з керуванням від комп'ютера. Коли завдання полягає в автоматизації операцій контейнерного крана, однією з функцій, що підлягають автоматизації, є автоматичне вертикальне штабелювання контейнерів і/або точне позиціонування контейнерів у необхідних місцях на землі. В останньому випадку звичайно прагнуть забезпечити точність розташування кутів контейнера в межах 5 см. Якщо контейнерний захват підвішений на контейнерному крані за допомогою піднімальних канатів або іншої коливної підвіски, то вітер, асиметричне навантаження й розтягання піднімальних канатів, крім інших факторів, не дозволяють вважати саме собою зрозумілим, що контейнерний захват висить під краном у правильному положенні й досить точно перпендикулярно. Фахівцям у даній галузі техніки зрозуміло, що для того, щоб, наприклад, поставити верхній контейнер зверху нижнього контейнера в необхідне положення при керуванні від комп'ютера, необхідно мати можливість точно вимірювати положення захвата в бічному напрямку, у поздовжньому напрямку, а також перекіс контейнера в горизонтальній площині, і, якщо необхідно, направляти захват у правильне положення. Як відомо з рівня техніки, зазначеними положеннями й перекосом можна в типовому випадку управляти за допомогою відтяжних канатів, установлених на контейнерному захваті. Фахівцям має бути зрозуміло, що завдяки використанню, наприклад, чотирьох відтяжних канатів у кутах захвата, відповідно до існуючого рівня техніки, можна як переміщати, так і повертати захват в горизонтальній площині шляхом регулювання відповідних довжин відтяжних канатів. У випадку автоматизації крана, зазначеними відтяжними канатами можна управляти за допомогою комп'ютера. Щоб верхній контейнер можна було плавно опускати на дах нижнього контейнера, наприклад, використовуючи комп'ютер, бажано мати точні дані про висоту й поздовжній нахил контейнера, що опускається, що дозволяє коректувати нахил щодо нижнього контейнера або землі за допомогою піднімального барабана з канатами й оптимально сповільнювати рух униз безпосередньо перед тим, як верхній контейнер торкнеться нижнього контейнера або землі. Фахівцеві в даній галузі техніки зрозуміло, що оцінка поздовжнього нахилу контейнера шляхом виміру розсинхронізації піднімальних барабанів, є ненадійною через можливе розтягання піднімальних канатів і можливий дисбаланс вантажу в контейнері. 1 UA 107545 C2 5 10 15 20 25 30 35 40 45 50 55 60 З рівня техніки відома система, здатна визначати положення контейнерного захвата. Вона складається з камер, установлених на крані, і активних інфрачервоних світлових випромінювачів, установлених на вантажозахватному пристрої. Однак, недоліком такої системи є велике число й складність камер (щонайменше двох) і випромінювачів (щонайменше трьох), установлюваних на вантажопідйомному пристрої, і, як наслідок, висока вартість устаткування. Крім того, точність виміру положення по висоті й поздовжнього нахилу не достатня для вищевказаних завдань. Розкриття винаходу Таким чином, завдання винаходу полягає в створенні системи й способу, які дозволяють частково або повністю вирішити щонайменше одну з вищезгаданих проблем. Поставлене завдання вирішене шляхом створення системи й способу, які характеризуються ознаками, розкритими в пунктах 1 і 10 формули винаходу. Кращі варіанти винаходу розкриті в залежних пунктах. Запропонована система визначення положення контейнерного захвата заснована на використанні сканувального датчика відстаней, установленого на контейнерному крані, і відбивачів, установлених на захваті. Датчик відстаней - це звичайно датчик на основі лазера, зокрема, датчик, що вимірює час проходження лазерного променя, однак, система за винаходом може бути також реалізована на основі датчику іншого типу, який надає відповідні вимірювані величини. У контексті винаходу, відбивач - це об'єкт, що установлений на захваті й має чітко заданий набір характеристик, які дозволяють відрізняти відбивач від інших об'єктів, що знаходяться у полі зору сканувального датчика відстаней. Такий набір характеристик містить у собі щонайменше форму й/або відносне положення відбивача. Форма об'єкта в полі зору датчика відстаней може бути визначена, наприклад, шляхом вимірювання відстані до об'єкта у множині напрямків за інтервали часу, досить короткі, щоб можна було зневажити переміщенням (розгойдуванням) захвата в процесі зазначеного виміру. Якщо форма об'єкта, яка встановлена на основі вимірювань у множині напрямків і відстані, відповідає формі відбивача, що записана в пам'яті пристрою обробки даних, то можна вважати, що виявлений об'єкт є відбивачем. В альтернативному випадку, визначити, що конкретний об'єкт є відбивачем, можна на основі його відносного положення. Як доповнення до зазначених форми й відносного положення, набір характеристик відбивача може також містити в собі, наприклад, колір. Винахід і кращі варіанти його здійснення дозволяють використовувати той самий датчик для визначення як горизонтального положення й розміщення (x_spr, y_spr, skew) захвата, так і вертикального положення й нахилу (h_spr, trim) захвата. За рахунок використання тільки одного датчика для декількох різних цілей можна домогтися значної економії витрат і полегшити калібрування встаткування. Короткий опис креслень Далі винахід описаний більш докладно на прикладі його кращого варіанта, розкритого з посиланням на додані креслення, на яких: Фіг. 1 зображує вигляд збоку контейнерного крану, контейнерного захвату й встановлених на ньому відбивачів в той час, як контейнерний кран ставить один контейнер на дах іншого, Фіг. 2 зображує вигляд зверху захвата контейнерного крана й установлених на ньому відбивачів, Фіг. 3 зображує кращі форми відбивачіві змінні величини, які використовуються при виявленні відбивачів. Здійснення винаходу Нижче винахід розкритий на ілюстративному, не обмежувальному прикладі, що стосується випадку контейнерного крана 10, у якому вантажозахватний пристрій, у цьому випадку - захват 2, підвішений до крана 10 (звичайно до спеціального візка) за допомогою спеціальних піднімальних канатів 4 і шківів 3 (Фіг. 1). Шляхом обертання піднімальних барабанів 11 можна змінювати довжину піднімальних канатів 4 і, отже, піднімати або опускати контейнерний захват 2. За рахунок збільшення або зменшення довжини піднімальних канатів 4 з передньої й задньої сторони контейнера можна змінювати поздовжній нахил захвата 2. Це може бути необхідно, коли переміщуваний контейнер 1 ставлять на дах нижнього контейнера 1' так, щоб передня й задня сторони верхнього контейнера торкнулися нижнього контейнера (або землі) одночасно. Ця функція найбільш краща при необхідності точного позиціонування контейнера. Фіг. 1, 2 і 3 пояснюють принцип роботи сканувального лазерного датчика 7 і зображують устаткування, яке розміщене на контейнерному крані 10 відповідно до даного винаходу. Лазерний датчик відстані випромінює лазерний світловий імпульс, який відбивається від об'єктів 5, 6, падаючи на них променем 8, при цьому частина лазерного випромінювання вертається до світлоприймача лазерного датчика відстані. Лазерний датчик відстані визначає час 2 UA 107545 C2 5 10 15 20 25 проходження світла між моментом випромінювання світлового імпульсу й моментом його прийому й на основі цього часу розраховує дистанцію R до відбиваючого об'єкта. Лазерний датчик відстані закріплений на роторі, що повертається навколо осі 14, перпендикулярної до лазерного променя, причому випромінювання лазерних світлових імпульсів 8 відбувається з високою частотою. Тоді, звичайно, лазерні промені 8 перекривають один одного, і в такому випадку між лазерними променями не залишається ніяких проміжків, і це дозволяє виявляти навіть невеликі об'єкти. Сканувальний лазерний датчик 7 відстані за допомогою свого внутрішнього сенсора також вимірює кут "а" випромінювання лазерного променя 8. Як показано на Фіг. 2, у кутах захвата 2 закріплені чотири керуючі відтяжні канати 12 (зображений тільки один канат), при цьому за рахунок зміни відносних довжин зазначених канатів можна переміщати захват 2 у бічних напрямках і повертати його в горизонтальній площині. Управляти канатами 12 можна за допомогою пристрою 13 обробки даних (комп'ютера). Відповідно до одного з варіантів запропонованого способу, один лазерний датчик 7 установлений на рамі контейнерного крана 10, по можливості безпосередньо над захватом 2, таким чином, щоб шлях руху променів 8 проходив уздовж довжини верхньої поверхні захвата 2 (Фіг. 2) для того, щоб лазерний датчик відстаней виявляв три відбивачі 5, 6, які встановлені на верхній поверхні контейнерного вантажозахватного пристрою. Лазерний датчик відстаней виконаний з можливістю надійного виявлення відбивачів, виконаних, наприклад, з металевого листа й пофарбованих у світлий колір, навіть на відстані 30 м. Природно, що відбивачі можуть бути виготовлені й з якогось іншого матеріалу. У типовому випадку датчик 7 забезпечує при кожному індивідуальному лазерному вимірі дистанції наступну інформацію: кут "а" виміру, вимірювану відстань R і, можливо, інтенсивність І відбитого світла. Як говорилося вище, система за винаходом може бути реалізована з іншими датчиками, що вимірюють величини {a, R} або {a, R, І}, отже, система не обмежена застосуванням тільки лазерної технології. Фахівцям даної галузі техніки зрозуміло, що, коли лазерні промені від сканувального лазерного датчика попадають на відбивач, як показано на Фіг. 3, на основі величин кутів "а" і відстаней R, виміряних датчиком 7, можна розрахувати вимірювані координати (h, у) поверхні відбивача стосовно датчика 7 і контейнерного крана 10 по формулі (1): 30 h=Rcos(a) y=Rsin(a) 35 40 (1) Нижче більш докладно описане здійснення запропонованого способу. На першому етапі визначають положення (y_taka) трикутного відбивача 6 у поздовжньому напрямку щодо датчика 7 і контейнерного крана 10 (див. Фіг. 3). Через те, що діапазон поздовжнього переміщення захвата 2, обумовлений канатами 4, 12, звичайно обмежений величиною ±100 см, перевірку обмежують відбиттями 8 (Rn, an), які виміряні датчиком 7 відстаней і для яких величина "у", розрахована за формулою (1), становить ±100 см від відомого нейтрального положення відбивача 6 у поздовжньому напрямку (коли захват 2 перебуває безпосередньо під краном 10). Припускаючи, що ділянки захвата 2, які оточують відбивач 6, розташовані нижче відбивача 6, положення верхньої точки відбивача 6 можна грубо визначити, вибираючи з послідовних відбиттів (Rn, an) те відбиття, яке при обчисленні за формулою (1) дає максимальне значення висоти h: y_taka=Rnsin(an) n=відбиття, при якому значення [Rn cos(an)] є максимальним. 45 50 55 (2) Фахівцям має бути зрозуміло, що знайдену в такий спосіб величину y_taka при необхідності можна уточнити, перевіряючи кілька відбиттів (R n, an) від відбивача 6 і зіставляючи відому форму відбивача 6 з вимірюваними величинами. Фахівцям також зрозуміло, що можливі бічні зсуви (x_etu, x_taka) захвата 2 не впливають на виявлення відбивача 6 такого типу, який показаний на Фіг. 3. Після того як установлене положення y_taka захвата в поздовжньому напрямку, на другому етапі розраховують теоретичні положення клиноподібних відбивачів 5 у поздовжньому напрямку, виходячи з відносних положень (y1…y4) відбивачів 5, 6 у поздовжньому напрямку (див. Фіг. 3). Потім, з відбиттів, виміряних датчиком 7, вибирають відбиття (R1, a1 … R4, а4), величини "у" яких у поздовжньому напрямку, розраховані за формулою (1), найкраще відповідають теоретичним значенням. 3 UA 107545 C2 5 На третьому етапі, на основі зазначених відбиттів (R1, a1 … R4, а4) за формулою (1) розраховують значення висот h1…h4. Якщо для визначення положення захвата використовувати клиноподібні відбивачі 5, показані на Фіг. 3, то різниця між висотами h1 і h2 (і відповідно між h3 і h4) буде лінійно залежати від положення захвата в бічному напрямку відповідно до формул: x_etu=A(h1-h2)+B_etu x_taka=A(h3-h4)+B_taka, 10 (3) де А - константа, яку визначають на основі форми відбивачів 5, a B_etu і B_taka калібрувальні коефіцієнти, які визначають, виходячи з установки відбивачів і датчика 7 відстаней. Фахівцям даної галузі техніки зрозуміло, що якщо поперечне балансування датчика 7 відрізняється від вертикального, калібрувальні коефіцієнти B_etu і B_taka будуть лінійно залежати від висоти (h) і зажадають окремого калібрування. Відповідно до одного з варіантів запропонованого способу, точну висоту відбивачів визначають у такий спосіб: 15 x_etu=(h1+h2)/2 x_taka=(h3+h4)/2, (4) Нарешті, визначають положення центральної точки й положення захвата. Положення захвата 2 у поздовжньому напрямку визначають із вимірюваної величини y_taka у такий спосіб: y_spr=y_taka+C, (5) 20 де С - калібрувальна константа, яку визначають відповідно до відомого відносного положення відбивача 6 і установки датчика 7 відстаней. Положення центральної точки й перекіс (skew) захвата 2 обчислюють на основі величин x_etu і x_taka у такий спосіб: x_spr=(x_etu+x_taka)/2 skew=arctan2[x_etu-x_taka, D] (6) 25 де D - відома відстань відбивачів 5. Відповідно до одного з варіантів запропонованого способу висоту центральної точки й поздовжній нахил захвата 2 можна обчислити, використовуючи величини h_etu і h_taka у такий спосіб: 30 h_T=(h_etu+h_taka)/2 trim=arctam2[h_etu-h_taka,D] 35 (7) Фахівцям у даній галузі зрозуміло, що завдяки розвитку техніки основна ідея даного винаходу може бути реалізована безліччю різних способів. Отже, даний винахід і варіанти його здійснення не повинні обмежуватися розкритими в описі прикладами, вони можуть змінюватися в границях обсягу домагань, обумовленого формулою винаходу. Наприклад, якщо датчик відстаней розмістити на захваті, а поверхні, що відбивають, на крані, то можна реалізувати по суті ті ж самі операції й одержати той самий результат. ФОРМУЛА ВИНАХОДУ 40 45 50 1. Система для визначення горизонтального положення (x_spr, y_spr) і перекосу (skew) вантажозахватного пристрою (2) крана (10), яка відрізняється тим, що вона містить: просторові відбивачі (5, 6) щонайменше двох типів, які розташовані на вантажозахватному пристрої (2) і мають відомі відносні положення і форми, при цьому верхня сторона відбивачів (5, 6) містить щонайменше одну поверхню, нахилену щодо горизонтальної площини, а бічний профіль відбивачів (5, 6) має, наприклад, трикутну або клиноподібну форму, якщо дивитися на нього в поперечному напрямку; щонайменше один сканувальний датчик (7) відстаней, встановлений на крані (10) і виконаний з можливістю вимірювання відстані (R) і напрямку (а) від крана (10) до відбивачів (5, 6); пристрій (13) обробки даних, виконаний з можливістю: зберігати в своїй пам'яті дані про відносні положення й форми відбивачів (5, 6); та 4 UA 107545 C2 5 10 15 20 25 30 35 40 45 50 55 визначати горизонтальне положення (x_spr, y_spr) і перекіс (skew) вантажозахватного пристрою (2) на основі щонайменше даних про відносні положення й просторові форми відбивачів (5, 6) і вимірюваних відстаней (R) і напрямків (а) від крана (10) до відбивачів (5, 6). 2. Система за п. 1, яка відрізняється тим, що вона виконана також з можливістю визначення висоти (h) і/або поздовжнього нахилу (trim) вантажозахватного пристрою (2). 3. Система за п. 1 або п. 2, яка відрізняється тим, що на крані (10) установлений один сканувальний датчик (7) відстаней. 4. Система за будь-яким із пп. 1-3, яка відрізняється тим, що відбивач (6) одного типу призначений для визначення поздовжнього положення (y_spr) вантажозахватного пристрою (2), причому основою для позиціонування відбивача (6) є його форма. 5. Система за п. 4, яка відрізняється тим, що відбивач (5) іншого типу призначений для визначення бічного положення (x_spr) і перекосу (skew) вантажозахватного пристрою, причому основою для позиціонування відбивачів (5) є інформація про відносне розташування відбивачів (5, 6). 6. Система за будь-яким із пп. 1-5, яка відрізняється тим, що датчик (7) відстаней є лазерним датчиком. 7. Система за будь-яким із пп. 1-6, яка відрізняється тим, що вона виконана з можливістю автоматичного керування краном (10). 8. Система за будь-яким із пп. 1-7, яка відрізняється тим, що кран (10) виконаний з можливістю переміщення без участі оператора. 9. Система за будь-яким із пп. 1-8, яка відрізняється тим, що кран (10) є контейнерним краном, а вантажозахватний пристрій (2) являє собою контейнерний захват. 10. Спосіб визначення горизонтального положення (x_spr, y_spr) і перекосу (skew) вантажозахватного пристрою (2) крана (10), який відрізняється тим, що в ньому використовують: просторові відбивачі (5, 6) щонайменше двох типів, які розташовані на вантажозахватному пристрої (2) і мають відомі відносні положення і форми, при цьому верхня сторона відбивачів (5, 6) містить щонайменше одну поверхню, нахилену щодо горизонтальної площини, а бічний профіль відбивачів (5, 6) має, наприклад, трикутну або клиноподібну форму, якщо дивитися на нього в поперечному напрямку; щонайменше один сканувальний датчик (7) відстаней, встановлений на крані (10) і виконаний з можливістю виміру відстані (R) і напрямку (а) від крана (10) до відбивачів (5, 6); і пристрій (13) обробки даних, що виконує наступні етапи: приймає від зазначеного датчика (7) дані про відстані (R) і напрямки (а) від крана до відбивачів (5, 6); зберігає в пам'яті дані про відносні положення й форми відбивачів (5, 6); визначає горизонтальне положення (x_spr, y_spr) і перекіс (skew) вантажозахватного пристрою (2) на основі щонайменше даних про відносні положення й просторові форми відбивачів (5, 6) і вимірюваних відстаней (R) і напрямків (а) від крана (10) до відбивачів (5, 6). 11. Спосіб за п. 10, який відрізняється тим, що включає також етап визначення висоти (h) і/або поздовжнього нахилу (trim) вантажозахватного пристрою (2). 12. Спосіб за п. 10 або п. 11, який відрізняється тим, що в ньому використовують один сканувальний датчик (7) відстаней, встановлений на крані (10). 13. Спосіб за будь-яким із пп. 11-12, який відрізняється тим, що відбивач (6) одного типу використовують для визначення поздовжнього положення (y_spr) вантажозахватного пристрою (2), причому основою для позиціонування відбивача (6) є його форма. 14. Спосіб за п. 13, який відрізняється тим, що відбивач (5) іншого типу використовують для визначення бічного положення (x_spr) і перекосу (skew) вантажозахватного пристрою, причому основою для позиціонування відбивачів (5) є інформація про відносне розташування відбивачів (5, 6). 15. Спосіб за будь-яким із пп. 11-14, який відрізняється тим, що використовують лазерний датчик, як зазначений датчик (7) відстаней. 16. Спосіб за будь-яким із пп. 11-15, який відрізняється тим, що керування краном (10) здійснюють автоматично. 17. Спосіб за будь-яким із пп. 11-16, який відрізняється тим, що кран (10) переміщують без участі оператора. 18. Спосіб за будь-яким із пп. 11-17, який відрізняється тим, що кран (10) є контейнерним краном, а вантажозахватний пристрій (2) являє собою контейнерний захват. 5 UA 107545 C2 6 UA 107545 C2 Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem and method for determining location and skew of crane grappling member
Автори англійськоюRintanen, Kari
Автори російськоюРинтанен Кари
МПК / Мітки
МПК: B66C 13/08, B66C 19/00, B66C 13/46
Мітки: перекосу, крана, пристрою, положення, спосіб, вантажозахватного, визначення, система
Код посилання
<a href="https://ua.patents.su/9-107545-sistema-ta-sposib-dlya-viznachennya-polozhennya-jj-perekosu-vantazhozakhvatnogo-pristroyu-krana.html" target="_blank" rel="follow" title="База патентів України">Система та спосіб для визначення положення й перекосу вантажозахватного пристрою крана</a>
Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії
Номер патенту: 31970
Опубліковано: 25.04.2008
Автор: Крюгер Георг Вернер
МПК: B66C 17/00
Мітки: підвіски, безконтактного, мостового, дії, просторового, положення, спосіб, вантажної, кругової, спеціального, крана, визначення
Формула / Реферат:
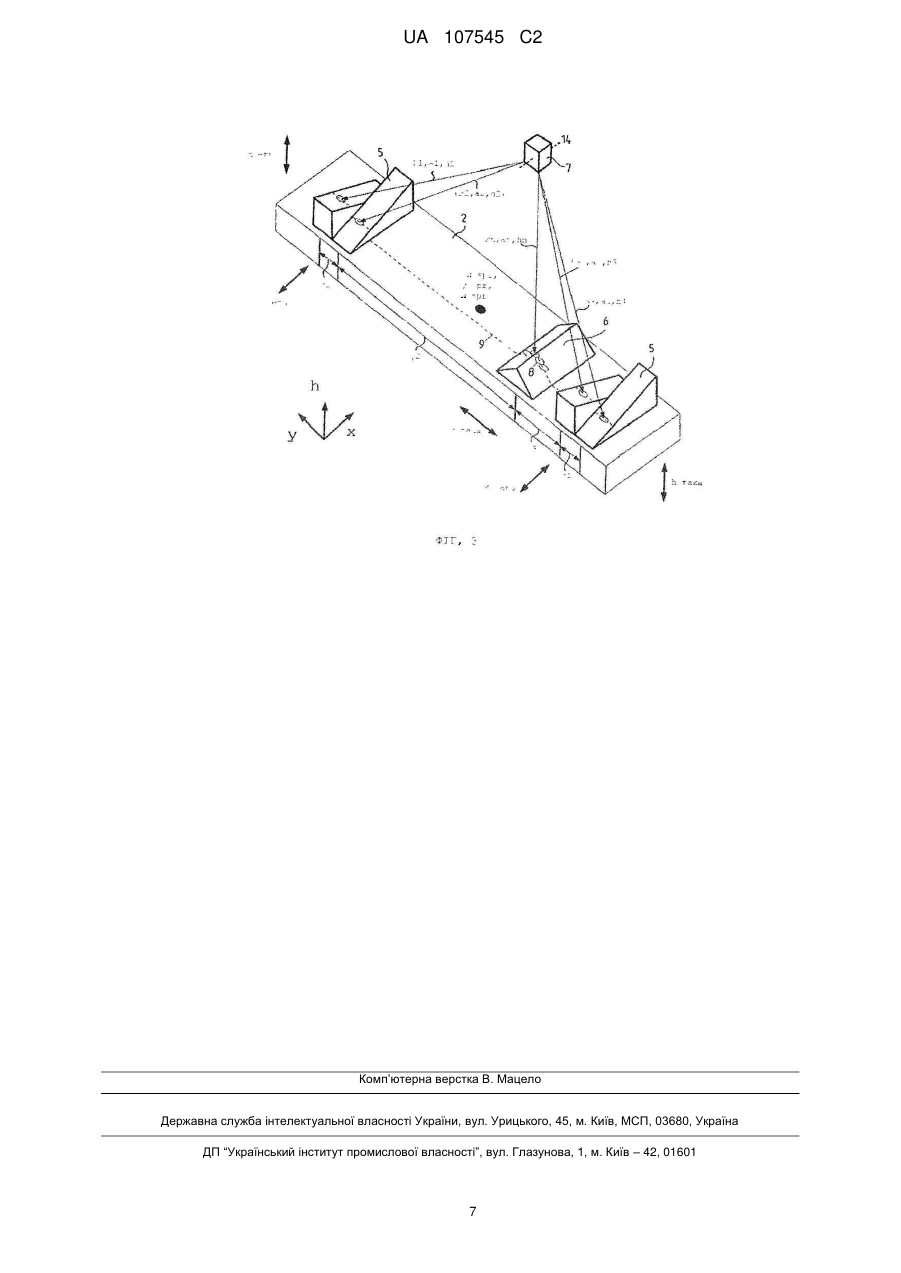
1. Спосіб безконтактного визначення просторового положення вантажної підвіски спеціального мостового крана кругової дії, згідно з яким визначення відбувається із застосуванням світловіддалемірів, який відрізняється тим, що як світловіддалеміри застосовують лазерні далекоміри, а положення вантажної підвіски мостового крана кругової дії визначають розрахунково-керуючим контролером через вимірювання та введення в контролер трьох складових...
Пристрій для контролю перекосу опорних металоконструкцій козлового крана
Номер патенту: 22456
Опубліковано: 25.04.2007
Автори: Гусєв Юрій Борисович, Цупіков Олександр Іванович, Глінін Геннадій Павлович, Кліпін В'ячеслав Михайлович, Куленцов Віктор Олександрович
МПК: B66C 9/00
Мітки: металоконструкцій, перекосу, контролю, опорних, пристрій, козлового, крана
Формула / Реферат:
1. Пристрій для контролю перекосу опорних металоконструкцій козлового крана, що містить джерело світлового випромінювання і блок світлочутливих елементів, оптична вісь джерела світлового випромінювання і оптичні осі блока світлочутливих елементів розташовані в одній площині, який відрізняється тим, що джерело світлового випромінювання і блок світлочутливих елементів закріплені на гнучкій опорі козлового крана таким чином, що площина, в якій...
Система для визначення положення мобільного радіотрансивера (варіанти) та спосіб визначення положення мобільного радіотрансивера
Номер патенту: 64780
Опубліковано: 15.03.2004
Автори: Гілгаузен Клайн С., Соліман Самір С.
МПК: G01S 5/02, G01S 1/00, G01S 5/00
Мітки: визначення, спосіб, система, радіотрансивера, положення, варіанти, мобільного
Формула / Реферат:
1. Система для визначення положення мобільного радіотрансивера, яка має: базову станцію , яка відрізняється тим, що вміщує засоби обчислення доплерівського зсуву відносно базової станції сигналів, які передають перший, другий і третій супутники, засоби обчислення першого набору псевдовідстаней 2, 3 відповідно першого і другого супутників відносно базової станції, засоби передачі інформації, яка ідентифікує супутник, інформації про...
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (аес)
Номер патенту: 49198
Опубліковано: 16.09.2002
Автори: Павлюков Сергій Сергійович, Бурачек Всеволод Германович, Середицька Тетяна Валеріївна
МПК: G02B 13/08
Мітки: визначення, візка, гака, крана, аес, планових, атомної, електростанції, центрального, координат, залу, спосіб
Формула / Реферат:
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (АЕС), що базується на світловіддалемірних вимірюваннях, який відрізняється тим, що світлові потоки випромінювання двох світловіддалемірів спрямовані по контуру залу до взаємно протилежних кінців крана, де вони змінюють свій напрямок на 90 градусів за допомогою пентагональних відбивачів і направляються назустріч один одному на відбиваючі елементи,...
Система визначення положення контейнерів на контейнерній площадці
Номер патенту: 62709
Опубліковано: 12.09.2011
Автор: Морозова Галина Вікторівна
МПК: B65G 63/00, B65G 1/00
Мітки: контейнерів, контейнерний, положення, система, визначення, площадці
Формула / Реферат:
1. Система визначення положення контейнерів на контейнерній площадці, що містить комп'ютер з можливістю відображення на дисплеї плана контейнерної площадки та розташування на ній контейнерів з кодами, електронну мережу і відеокамери, яка відрізняється тим, що додатково введено відеосервер, відеокамери підключені до входу відеосервера, а вихід відеосервера з обробленим цифровим сигналом підключений в мережевий простір.2. Система за...
Попередній патент: Перетворювач двійкового коду в однополярні оборотні коди і навпаки
Наступний патент: Спосіб визначення днк культури lactococcus lactis subsp. lactis методом полімеразної ланцюгової реакції
Випадковий патент: Резонансне зварювальне джерело живлення