Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (аес)
Номер патенту: 49198
Опубліковано: 16.09.2002
Автори: Бурачек Всеволод Германович, Павлюков Сергій Сергійович, Середицька Тетяна Валеріївна
Формула / Реферат
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (АЕС), що базується на світловіддалемірних вимірюваннях, який відрізняється тим, що світлові потоки випромінювання двох світловіддалемірів спрямовані по контуру залу до взаємно протилежних кінців крана, де вони змінюють свій напрямок на 90 градусів за допомогою пентагональних відбивачів і направляються назустріч один одному на відбиваючі елементи, які закріплені на корпусі візка, після відбиття від яких відбиті світлові потоки проходять в обернених (зворотних) напрямках і попадають на фотоприймачі світловіддалемірів, при цьому координати проекції гака візка крана розраховують за формулами:
при r1 = r2 = r
c1= c2
c1 + c2 = c
де S1 = S1 вим - DS,
S2 = S2 вим - DS,
S1, S2 – відстані від світловіддалемірів до трипіль-призм,
DS - поправка за хід оптичного променя,
S1вим, S2вим – виміряні відстані,
r1, r2 –відстань “оптичної пастки”,
b – базисна відстань між двома світловіддалемірами,
с1, с2 – постійні величини-відстані від трипіль-призм до положення гака на візку крана.
Текст
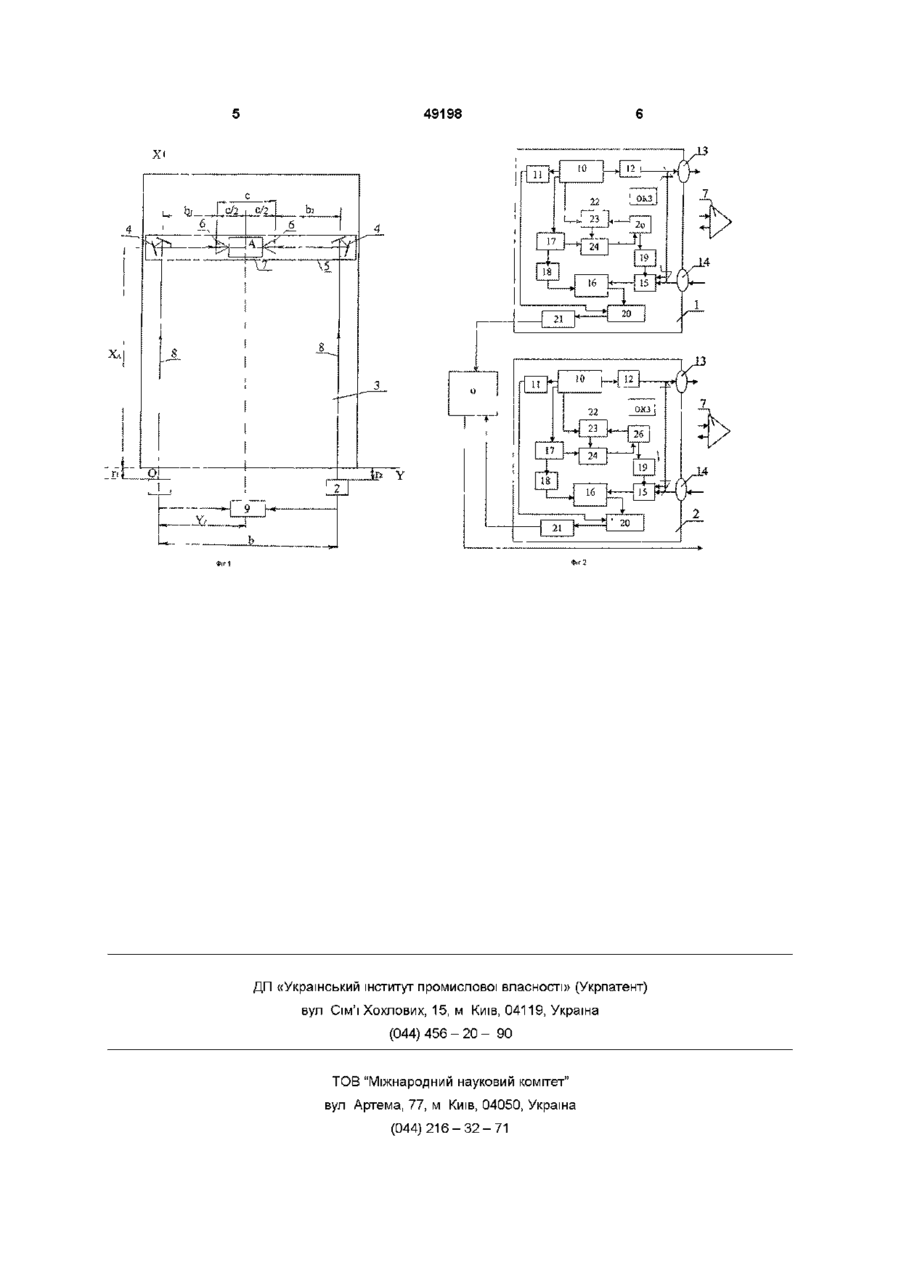
Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (АЕС), що базується на світловіддалемірних вимірюваннях, який відрізняється тим, що СВІТЛОВІ потоки ви промінювання двох світловіддалемірів спрямовані по контуру залу до взаємно протилежних КІНЦІВ крана, де вони змінюють свій напрямок на 90 градусів за допомогою пентагональних відбивачів і направляються назустріч один одному на відбиваючі елементи, які закріплені на корпусі візка, після відбиття від яких відбиті СВІТЛОВІ потоки проходять в обернених (зворотних) напрямках і попадають на фотоприймачі світловіддалемірів, при Ха - (Si+S2-ri-r2-b+ci+c2) / 2 Ya = (Si-S2-ri+r2+b+ei-c2) / 2 . При Гі = Г2 = Г С1=С2 Сі + С2 = С (Si-bS2-2r-b+c)/2 = (Si-S2+b)/2 де Si = Si вим - AS, S2 = S2 вим - AS, Si, S2 - відстані від світловіддалемірів до трипіль-призм, AS - поправка за хід оптичного променя, S I B H M , Э г в и м - в и м і р я н і відстані, г-і, Г2 -відстань "оптичної пастки", b базисна відстань між двома світловіддалемірами, с-і, С - постійні величини-відстані від трипіль2 призм до положення гака на візку крана 00 Винахід відноситься до області інженерної геодезії ВІДОМІ традиційні способи визначення координат, які широко застосовуються в геодезії триангуляція, полігонометрія, трипатерація, полярний спосіб, різні види геодезичних засічок [1] Найбільш близьким аналогом по технічній суті та результату , що досягається та взятим за прототип є лінійна засічка [2], [3], суть якої полягає у вимірюванні двох відстаней від двох вихідних пунктів до спостерігаємого об'єкту Недоліком цього прототипу є необхідність присутності оператора біля приладу під час вимірювань в умовах радіації Аналіз відомих технічних рішень та наукової літератури показав відсутність геодезичних технічних рішень для даного кола завдань, дозволяючих отримувати планове положення візка крана в умовах радіації Задачею винаходу є автоматичне визначення поточних координат гака на візку крана центрального зала АЕС для забезпечення необхідної точності позиціювання небезпечного вантажу при завантаженні та розвантаженні Спосіб визначення планових координат гака візка крана центрального зала АЕС базується на вимірюванні двома світловіддалемірами , які знаходяться за межами центрального зала, відстаней 81 вим і 82вим по контуру зала Потоки випромінювання спрямовані до взаємно протилежних КІНЦІВ крана, де вони змінюють свій напрямок на 90 градусів за допомогою пентагональних відбивачів і направляються назустріч один одному на відбиваючі елементи - (трипіль-призми), які закріплені на корпусі візка Після відбиття від трипіль-призм відбиті СВІТОВІ потоки проходять в обернених напрямках і попадають на фотоприймачі СВІТЛОВІДдалекомірів При цьому координати проекції гака візка крана розраховують за формулами 49198 Xa=(Si+S 2 -ri-r 2 -b+ci+c 2 )/2 Ya=(Si-S 2 -ri+r 2 +b+ci-C2)/2 (I) де Si,S2 - відстані від світловіддалемірів до трипіль-призм S I B H M , S2BHM - в и м і р я н і в і д с т а н і ASi 2 - поправка за хід оптичного променя в пентагональних відбивачах і в трипіль-призмах b - базисна відстань між двома світловіддалемірами Сі,С2 - ПОСТІЙНІ величини - відстані від трипільпризм до положення гака на візку крана г-і,Г2 - відстань "оптичної пастки" При Сі=С2 Гі = Г2=Г формула (1) буде за умови, що Сі+С2=с, мати вигляд Xa=(Si+S 2 -2r-b+c)/2 Ya=(S r S 2 +b)/2 На фіг 1 показана схема для реалізації запропонованого способу визначення планових координат гака на візку крана центрального зала АЕС, яка складається з світловіддалемірів (1) і (2), які знаходяться за межами центрального залу (3), пентагональних відбивачів (4), розміщених на протилежних кінцях крана (5), відбиваючих елементів -трипіль - призм (6), розміщених на візку (7), потоки випромінювання (8), що спрямовані від світловіддалемірів через пентагональні відбивачі до відбиваючих елементів, блоку обробки інформації (9) На фіг 2 показана блок-схема двох імпульснофазових світловіддалекомірів, які з'єднанні з блоком обробки інформації (9) На схемі зображено 1 , 2 - імпульсно-фазові світловіддалеміри, 7 - відбиваючі елементи, 9 - блок обробки інформації, 10 - генератор вимірювальних коливань, 11,18,19 - формувачі імпульсів, 12 - джерело світла, 13 - передавальна оптична система, 14 - приймальна оптична система, 15 - фотоелектронний помножувач, 16 - давач інтервалу ЛІ, 17 - поділювач частоти, 20 - електронний ключ, 21 - лічильник, 22 - фазовий автопідстроювач ФАП, 23 - змішувач, 24 - фазовий детектор ФД, 25 - гетеродин Запропонована схема імпульсно-фазових відцалекомірів працює наступним чином Джерелом вимірювальних коливань є генератор (10) Коливання генератора подаютьсяна фо рмувач імпульсів ФІ (11) Джерелом світла (12) є світлодюд, або напівпровідниковий лазер Режим роботи джерела світла встановлюють таким, щоб воно випромінювало імпульси електромагнітних коливань в ті моменти часу, коли фаза вимірювальної напруги дорівнює нулю Передавальна оптична система (13) передає імпульси електромагнітних коливань на відбивач (7) Відбиті імпульси приймає приймальна оптична система (14) і передає їх на фотоелектронний помножувач ФЕН (15), який виконує функцію схеми збіжності Отримувані з ФЕН сигнальні імпульси прямують на давач інтервалу (16) Опорні коливання отримують діленням частоти вимірювальних коливань в поділювачі (17) Далі з них формують імпульси на ФІ (18), які йдуть на давач інтервалу (16) разом з сигнальними імпульсами, що формуються на ФІ (19), з ФЕН Імпульси, отримувані з давача, відкривають електронний ключ (20) на проміжок часу Д Через електронний ключ, коли він відкритий, проходять на лічильник (21) заповнюючи імпульси Вони формуються з вимірювальних коливань КІЛЬКІСТЬ заповнюючих імпульсів, які пройшли через ключ на лічильник, висвітлюється на табло фазометра, що знаходиться в пристрої обробки інформації (9) Щоб зменшити приладові помилки у всіх віддалекомірах є ОКЗ, яке часто вмикається автоматично Для того, щоб фазовий домір, виміряний фазометром світловіддалекоміра, дорівнював фазовому домірові на вимірювальній частоті, у віддалемірі є автоматичне підстроювання фази коливань гетеродина ФАП (22) Система ФАП складається із змішувача (23) і фазового детектора ФД (24) На змішувач ідуть вимірювальні коливання та коливання гетеродину (25) Запропонований спосіб визначення координат не зустрічався в проаналізованій літературі та патентних матеріалах і, отже, є новим При цьому досягається позитивний ефект, а саме значне підвищення стабільності та автоматизації вимірювання координат X та Y в умовах радіації Джерела інформації 1 Справочник геодезиста (Под ред В Д Большакова , Г П Левчука) М Недра, 1975г 2 Применение геодезических засечек, их обобщенные схемы и способы машинного решения (П И Баран , В И Мицкевич и др ) М Недра , 1986г 3 Авто колімаційні, поляризаційні і лазерні вимірювання в геодезії Монографія (Боровий В О ) Чернігів, РВВ - ЧДІЕіУ - НЦ МДВУ, 1999 231с 49198 _ZST~Y ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining specified coordinates of the crane trolley hook in the central room of a nuclear power plant
Автори англійськоюBurachek Vsevolod Hermanovych, Pavliukov Serhii Serhiiovych
Назва патенту російськоюСпособ определения заданных координат крюка тележки крана в центральном зале атомной электростанции
Автори російськоюБурачек Вселовод Германович, Павлюков Сергей Сергеевич
МПК / Мітки
МПК: G02B 13/08
Мітки: спосіб, координат, крана, аес, визначення, центрального, атомної, планових, гака, електростанції, візка, залу
Код посилання
<a href="https://ua.patents.su/3-49198-sposib-viznachennya-planovikh-koordinat-gaka-vizka-krana-centralnogo-zalu-atomno-elektrostanci-aes.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення планових координат гака візка крана центрального залу атомної електростанції (аес)</a>
Спосіб поховання аварійного реактора атомної електростанції
Номер патенту: 28606
Опубліковано: 16.10.2000
Автори: Шевцов Микола Романович, Тюркян Раффі Арменакович, Новік Євген Борисович, Бородін Сергій Анатолійович, Сургай Микола Сафонович
МПК: G21C 11/00
Мітки: електростанції, атомної, аварійного, реактора, спосіб, поховання
Формула / Реферат:
Спосіб поховання аварійного реактора атомної електростанції, включає в себе створення шахтного колодязя діаметром достатнім для проходження реактора, приміщення реактора в шахтний колодязь з наступним заповненням колодязя захисним матеріалом, який відрізняється тим, що шахтний колодязь створюють глибиною, що забезпечує у випадку спонтанної ланцюгової реакції похованого реактора протікання явища атомного вибуху в режимі камуфлета і на відстані...
Рама візка вантажопідйомного крана
Номер патенту: 1002
Опубліковано: 16.07.2001
Автори: Гусев Юрій Борисович, Сушков Броніслав Костянтинович, Шарепо Володимир Юхимович, Гонтарев Олександр Стефанович
МПК: B66C 11/00
Мітки: крана, візка, рама, вантажопідйомного
Формула / Реферат:
1. Рама візка вантажопідйомного крана, що містить сполучені між собой зовнішні двоконсольні подовжні балки та поперечні балки, внутрішні подовжні балки, розташовані поміж зовнішніми поперечними балками, яка відрізняється тим, що зверху вздовж на консольних відрізках зовнішніх подовжніх балок закріплені елементи коробчатого профілю, при цьому зовнішні подовжні балки на відрізках між зовнішніми поперечними балками виконані відкритого профілю,...
Спосіб регулювання живлення парогенератора атомної електростанції з водоводяним реактором

Номер патенту: 14275
Опубліковано: 25.04.1997
Автори: Полівенок Валерій Арсенович, Сімкін Борис Юхимович
МПК: G21D 3/08
Мітки: електростанції, водоводяним, регулювання, спосіб, парогенератора, живлення, атомної, реактором
Спосіб регулювання параметрів технологічного устаткування машзалу енергоблока атомної електростанції
Номер патенту: 18695
Опубліковано: 25.12.1997
Автори: Королько Людмила Василівна, Нікітін Юрій Васильович, Макаренко Микола Іванович, Кожина Ольга Володимирівна
МПК: F01D 17/00
Мітки: енергоблока, машзалу, параметрів, технологічного, регулювання, електростанції, спосіб, атомної, устаткування
Формула / Реферат:
Способ регулирования параметров технологического оборудования машзала энергоблока атомной электростанции путем измерения регулируемого параметра, определения его скорости, контроля с помощью преобразователя достоверности показаний датчика регулируемого параметра и подачи преобразованного сигнала через эталонную модель на вход регулятора, формирующего управляющее воздействие на исполнительный орган, отличающийся тем, что после выдачи...
Головний циркуляційний насос атомної електростанції
Номер патенту: 23995
Опубліковано: 15.08.2002
Автори: Гарбуз Людміла Степанівна, Гарбуз Віталій Іванович, Гарбуз Степан Іванович, Гарбуз Володимир Степанович
МПК: F04D 3/00, F04C 2/324
Мітки: насос, електростанції, циркуляційний, головний, атомної
Формула / Реферат:
Главный циркуляционный насос атомной электростанции, содержащий корпус, в котором установлены посаженное на вал рабочее колесо с рабочими лопастями, всасывающий и нагнетательный патрубки, отличающийся тем, что дополнительно содержит защитную гильзу с фланцем, установленную в корпусе, в которой смонтированы дисковый и винтовой отражатели, приставку-емкость, которая соединена с всасывающим патрубком, а по обе стороны рабочего колеса с...
Попередній патент: Установка для гарячого заправлення футерівки склепіння електропечі
Наступний патент: Гальмівна система транспортного засобу
Випадковий патент: Прозора полива