Автоматизована система підтримання рівня води в барабані-сепараторі парового котла-охолоджувача газовідвідного тракту конвертера
Номер патенту: 114087
Опубліковано: 27.02.2017
Автори: Пірогов Олександр Юрійович, Пироженко Андрій Анатолійович, Криволапов Олексій Єфремович, Кривоносов Анатолій Іванович
Формула / Реферат
Автоматизована система підтримання рівня води в барабані-сепараторі парового котла-охолоджувача газовідвідного тракту конвертера, що містить програмований логічний контролер (ПЛК), з'єднаний з автоматизованим робочим місцем (АРМ) оператора електронною мережею Езернет через мережевий комутатор, станцію вводу-виводу сигналів, яка з'єднана з ПЛК електронною мережею Профібас і яка обладнана модулем вхідних аналогових струмових сигналів, з'єднаним лініями аналогових струмових сигналів з датчиком рівня води в барабані-сепараторі (БС), з датчиком витрати живильної води в БС, з датчиком положення регулювального клапана (РК) в лінії живильної води БС, модулем вхідних дискретних сигналів, з'єднаним лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, і модулем вихідних дискретних сигналів, з'єднаним лініями дискретних сигналів з блоком електронних керованих ключів (ЕКК), що підключений лініями команд до приймача команд "Більше"/"Менше"" на РК, яка відрізняється тим, що вона додатково обладнана мікроконтролером з вбудованими входами для аналогових струмових сигналів і дискретних сигналів та з вбудованими виходами для дискретних сигналів, блоком повторювачів струмових сигналів (ПСС), встановленим на лінії аналогових струмових сигналів від датчика рівня води в БС, при цьому мікроконтролер з'єднаний з АРМ оператора і з ПЛК електронною мережею Езернет через мережевий комутатор, а також з'єднаний по входу додатковою лінією дискретних сигналів з модулем вихідних дискретних сигналів станції вводу-виводу сигналів, додатковою лінією аналогових струмових сигналів з блоком ПСС, додатковою лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, з'єднаний по виходу додатковими лініями дискретних сигналів з блоком ЕКК.
Текст
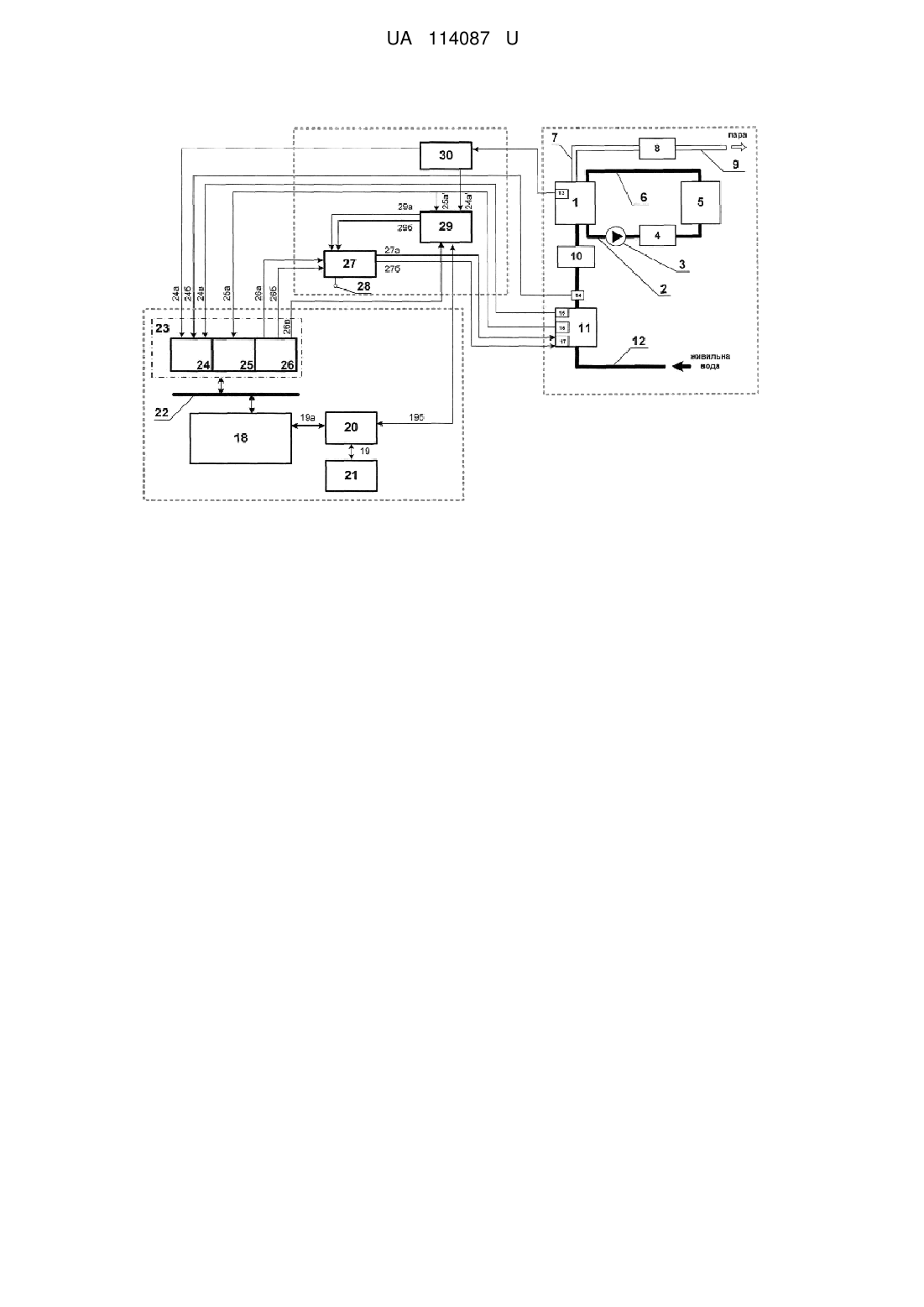
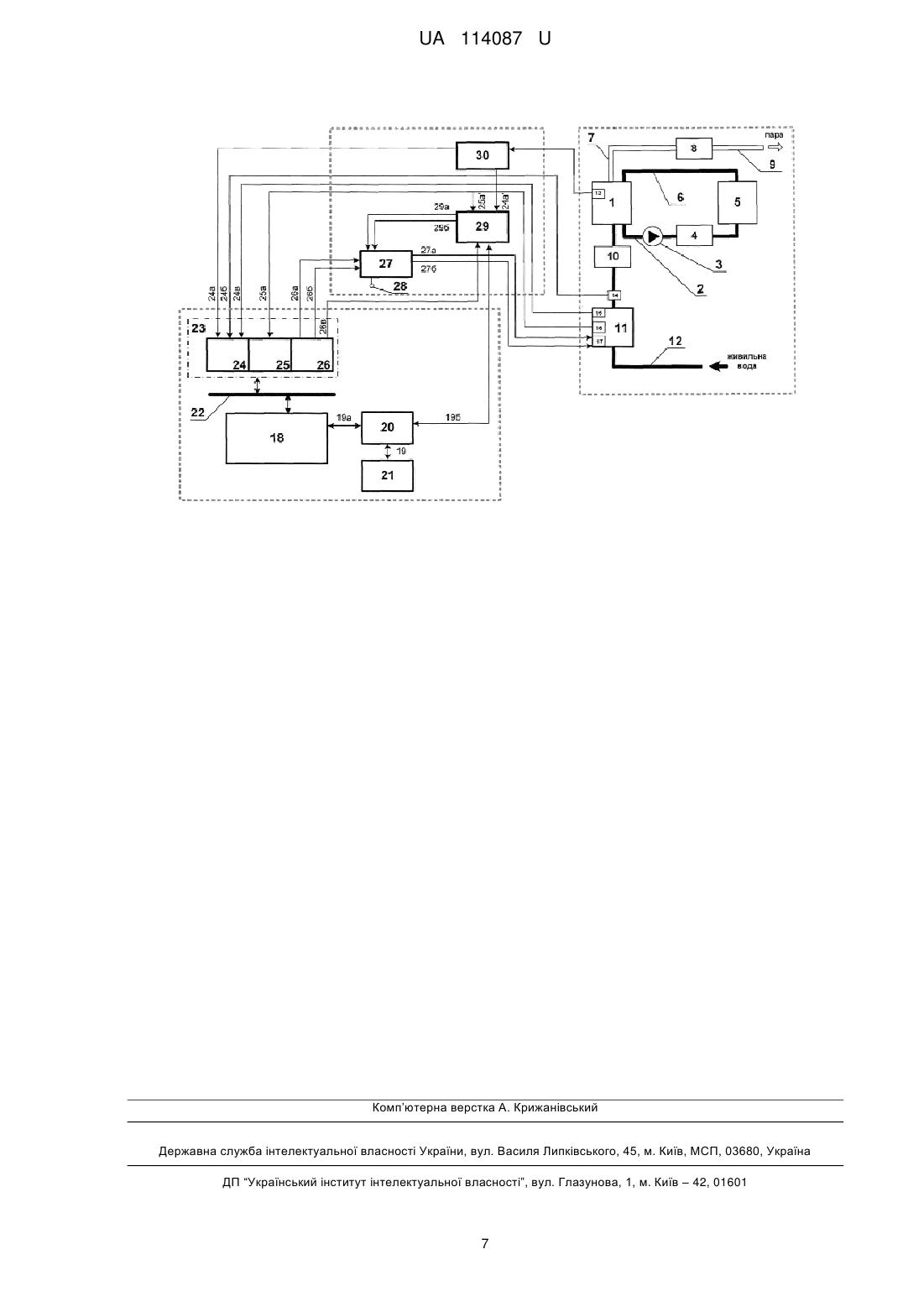
Реферат: Автоматизована система підтримання рівня води в барабані-сепараторі парового котлаохолоджувача газовідвідного тракту конвертера містить програмований логічний контролер (ПЛК), з'єднаний з автоматизованим робочим місцем (АРМ) оператора електронною мережею Езернет через мережевий комутатор, станцію вводу-виводу сигналів, яка з'єднана з ПЛК електронною мережею Профібас і яка обладнана модулем вхідних аналогових струмових сигналів, з'єднаним з датчиком рівня води в барабані-сепараторі (БС), з датчиком витрати живильної води в БС, з датчиком положення регулювального клапана (РК) в лінії живильної води БС, модулем вхідних дискретних сигналів, з'єднаним з датчиком кінцевого положення "Закрито" на РК, і модулем вихідних дискретних сигналів, з'єднаним з блоком електронних керованих ключів (ЕКК), що підключений до приймача команд "Більше"/"Менше"" на РК. Крім цього вона додатково обладнана мікроконтролером з вбудованими входами для аналогових струмових сигналів і дискретних сигналів та з вбудованими виходами для дискретних сигналів, блоком повторювачів струмових сигналів (ПСС), встановленим на лінії аналогових струмових сигналів від датчика рівня води в БС, при цьому мікроконтролер з'єднаний з АРМ оператора і з ПЛК електронною мережею Езернет через мережевий комутатор, а також з'єднаний з модулем вихідних дискретних сигналів станції вводу-виводу сигналів, з блоком ПСС, з датчиком кінцевого положення "Закрито" на РК, з'єднаний по виходу з блоком ЕКК. UA 114087 U (12) UA 114087 U UA 114087 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель, що заявляється, належить до автоматизованих систем для забезпечення працездатності барабанів-сепараторів парових котлів-охолоджувачів газовідвідних трактів конвертерів та може бути використана в металургійній промисловості. Найбільш близьким за сукупністю ознак до об'єкта, що заявляється, є вибрана як прототип автоматизована система підтримання рівня води в барабані-сепараторі парового котлаохолоджувача газовідвідного тракту конвертера, що містить програмований логічний контролер (ПЛК), з'єднаний з автоматизованим робочим місцем (АРМ) оператора електронною мережею Езернет (англ. мов. Ethernet) через мережевий комутатор, станцію вводу-виводу сигналів, яка з'єднана з ПЛК електронною мережею Профібас (англ. мов. Profibus) і яка обладнана модулем вхідних аналогових струмових сигналів, з'єднаним лініями аналогових струмових сигналів з датчиком рівня води в барабані-сепараторі (БС), з датчиком витрати живильної води в БС, з датчиком положення регулювального клапана (РК) в лінії живильної води БС, модулем вхідних дискретних сигналів, з'єднаним лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, і модулем вихідних дискретних сигналів, з'єднаним лініями дискретних сигналів з блоком електронних керованих ключів (ЕКК), який підключений лініями команд до приймача команд "Більше"/"Менше" на РК. Використання станції вводу-виводу сигналів, що обладнана модулем вхідних аналогових струмових сигналів, модулем вхідних дискретних сигналів і модулем вихідних дискретних сигналів, блоку ЕКК, підключеного до джерела живлення, датчика рівня води в БС, датчика витрати живильної води в БС, датчика положення РК, датчика кінцевого положення "Закрито" на РК, приймача команд "Більше"/"Менше" на РК, а також комунікаційні з'єднання є стандартним для автоматизованих систем такого рівня і призначення [Кривоносов А.И., Пироженко А.А., Криволапов А.Е., Шахов С.В., Боряк А.С, Панасенко С.Н., Хвостов С.С. АСУТП газоотводящего тракта конвертера № 1 ПАО "Мариупольский металлургический комбінат имени Ильича" [Электронний ресурс] //Публикации: [сайт ДП "УкрНТЦ "Енергосталь"]. Текст, і графічні дані. Режим доступу: http://energostal.kharkov.ua/press-center/publikatsyi/747]. ПЛК - мікропроцесорний пристрій, призначений для контролю і керування технологічними процесами. Робота ПЛК полягає у збиранні сигналів від датчиків та їхній обробці за прикладною програмою з видачею керуючих сигналів на виконавчі механізми. ПЛК в прототипі використовується, зокрема, для підтримання безпечного рівня води в БС за рахунок регулювання витрати живильної води шляхом спрямування команд на відкриття або закриття РК в лінії живильної води. У корисної моделі, що заявляється, і прототипу співпадають такі суттєві ознаки. Обидві автоматизовані системи містять ПЛК, з'єднаний з АРМ оператора електронною мережею Езернет через мережевий комутатор, станцію вводу-виводу сигналів, яка з'єднана з ПЛК електронною мережею Профібас і яка обладнана модулем вхідних аналогових струмових сигналів, з'єднаним лініями аналогових струмових сигналів з датчиком рівня води в БС, з датчиком витрати живильної води в БС, з датчиком положення РК в лінії живильної води БС, модулем вхідних дискретних сигналів, з'єднаним лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, і модулем вихідних дискретних сигналів, з'єднаним лінією дискретних сигналів з блоком ЕКК, який підключений лінією команд до приймача команд "Більше"/"Менше" на РК. Аналіз технічних властивостей прототипу, обумовлених його ознаками, показує, що отриманню очікуваного технічного результату при використанні прототипу перешкоджають такі причини. Використання системи за прототипом забезпечує виконання всіх необхідних функцій, однак, у разі відмови ПЛК керування РК в лінії живильної води БС стане неможливим, що зумовить упускання води з БС і неможливість підтримання безпечного рівня води в БС для безаварійної роботи циркуляційних насосів, які забезпечують подачу води з БС в нагрівальні поверхні парового котла-охолоджувача для охолодження конвертерних газів. В основу об'єкта, що заявляється, поставлена задача створити таку автоматизовану систему підтримання рівня води в барабані-сепараторі парового котла-охолоджувача газовідвідного тракту конвертера, в якій удосконалення шляхом введення нових елементів і нових зв'язків між елементами дозволять при використанні об'єкта, що заявляється, забезпечити досягнення технічного результату, який полягає у підтриманні безпечного рівня води в БС в разі відмови ПЛК для безаварійної роботи циркуляційних насосів за рахунок створення додаткового контуру керування РК в лінії живильної води БС з мінімальними капітальними і експлуатаційними витратами. Суть автоматизованої системи, що заявляється, полягає в такому. Корисна модель, що заявляється, містить програмований логічний контролер (ПЛК), з'єднаний з автоматизованим робочим місцем (АРМ) оператора електронною мережею Езернет через мережевий комутатор, 1 UA 114087 U 5 10 15 20 25 30 35 40 45 50 55 60 станцію вводу-виводу сигналів, яка з'єднана з ПЛК електронною мережею Профібас і яка обладнана модулем вхідних аналогових струмових сигналів, з'єднаним лініями аналогових струмових сигналів з датчиком рівня води в барабані-сепараторі (БС), з датчиком витрати живильної води в БС, з датчиком положення регулювального клапана (РК) в лінії живильної води БС, модулем вхідних дискретних сигналів, з'єднаним лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, і модулем вихідних дискретних сигналів, з'єднаним лініями дискретних сигналів з блоком електронних керованих ключів (ЕКК), який підключений лініями команд до приймача команд "Більше"/"Менше" на РК. Відмітною особливістю автоматизованої системи, що заявляється, є те, що вона додатково обладнана мікроконтролером з вбудованими входами для аналогових струмових сигналів і дискретних сигналів та з вбудованими виходами для дискретних сигналів, блоком повторювачів струмових сигналів (ПСС), встановленим на лінії аналогових струмових сигналів від датчика рівня води в БС. При цьому мікроконтролер з'єднаний з АРМ оператора і з ПЛК електронною мережею Езернет через мережевий комутатор, а також з'єднаний по входу додатковою лінією дискретних сигналів з модулем вихідних дискретних сигналів станції вводу-виводу сигналів, додатковою лінією аналогових струмових сигналів з блоком ПСС, додатковою лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, з'єднаний по виходу додатковими лініями дискретних сигналів з блоком ЕКК. При використанні об'єкта, що заявляється, забезпечується досягнення технічного результату, який полягає у підтриманні безпечного рівня води в БС в разі відмови ПЛК для безаварійної роботи циркуляційних насосів за рахунок створення додаткового контуру керування РК в лінії живильної води БС з мінімальними капітальними і експлуатаційними витратами. Крім цього, при використанні корисної моделі, що заявляється, забезпечується досягнення додаткового технічного результату, який полягає у створенні компактного додаткового контуру керування РК із застосуванням всього двох додаткових елементів обладнання при відносно невеликій кількості додаткових комунікаційних з'єднань (всього шість додаткових ліній). Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом, що досягається, є такий. Додаткове обладнання автоматизованої системи, що заявляється, мікроконтролером і блоком ПСС, який встановлений на лінії аналогових струмових сигналів від датчика рівня води в БС, з'єднання мікроконтролера з АРМ оператора і з ПЛК електронною мережею Езернет через мережевий комутатор, а також його з'єднання по входу додатковою лінією дискретних сигналів з модулем вихідних дискретних сигналів станції вводу-виводу сигналів, додатковою лінією аналогових струмових сигналів з блоком ПСС, додатковою лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК і з'єднання по виходу додатковими лініями дискретних сигналів з блоком ЕКК, дозволяє з мінімальними капітальними і експлуатаційними витратами, а також конструктивно і технологічно просто створити додатковий контур керування РК в лінії живильної води БС, який забезпечує підтримання безпечного рівня води в БС в разі відмови ПЛК для безаварійної роботи циркуляційних насосів. Використання блока ПСС дозволяє не встановлювати додаткові датчики і конструктивно просто продублювати аналоговий струмовий сигнал від датчика рівня води в БС для ПЛК і для мікроконтролера. Використання для організації додаткового контуру керування РК мікроконтролера, наприклад мікроконтролера "LOGO!" (виробник Сіменс АГ, Німеччина), з одним вбудованим входом для аналогових струмових сигналів від датчика рівня води в БС, одним вбудованими входом для дискретних сигналів від станції вводу-виводу сигналів і одним вбудованими входом для дискретних сигналів від датчика кінцевого положення "Закрито" на РК, двома виходами для дискретних сигналів до блоку ЕКК, а також його підключення мережею Езернет до ПЛК і АРМ оператора, дозволяє забезпечити компактність і відносно невелику вартість такого додаткового контуру, а також мінімізувати додаткові комунікаційні з'єднання. Розмір капітальних витрат на організацію додаткового контуру керування РК в лінії живильної води БС в складі мікроконтролера, блока ЕКК, блока ПСС і мережевих комунікацій не перевищує 5 % від вартості основаного контуру керування, який складається з ПЛК, станції вводу-виводу і АРМ оператора. Суть корисної моделі, що заявляється, пояснюється кресленням, на якому зображена принципова схема автоматизованої системи підтримання рівня води в барабані-сепараторі парового котла-охолоджувача газовідвідного тракту конвертера, що заявляється. На кресленні проставлені такі позначення: 1 - барабан-сепаратор (БС); 2 UA 114087 U 5 10 15 20 25 30 35 40 45 50 55 2 - трубопровід циркуляційної води для охолодження конвертерних газів; 3 - циркуляційні насоси; 4 - зворотний клапан; 5 - нагрівальні поверхні парового котла-охолоджувача; 6 - трубопровід пароводяної суміші; 7 - паропровід; 8 - парова засувка; 9 - загальний паровий колектор; 10 - засувка в лінії живильної води БС; 11 - регулювальний клапан (РК); 12 - лінія живильної води; 13 - датчик рівня води в БС; 14 - датчик витрати живильної води в БС; 15 - датчик положення РК; 16 - датчик кінцевого положення "Закрито" на РК; 17 - приймач команд "Більше"/"Менше" на РК; 18 - програмований логічний контролер (ПЛК); 19, 19а, 19б - електронна мережа Езернет; 20 - мережевий комутатор; 21 - автоматизоване робоче місце (АРМ) оператора; 22 - електронна мережа Профібас; 23 - станція вводу-виводу сигналів; 24 - модуль вхідних аналогових струмових сигналів; 24а, 24а', 24б, 24в - лінії вхідних аналогових струмових сигналів; 25 - модуль вхідних дискретних сигналів; 25а, 25а', 24б, 24в - лінії вхідних дискретних сигналів; 26 - модуль вихідних дискретних сигналів; 26а, 26б, 26в - лінії вихідних дискретних сигналів; 27 - блок електронних керованих ключів (ЕКК); 27а, 27б - лінії команд на РК; 28 - джерело живлення для формування команд на РК; 29 - мікроконтролер (МК); 29а, 29б - лінії вихідних дискретних сигналів МК; 30 - блок повторювачів струмових сигналів (ПСС). Автоматизована система, що заявляється, призначена для підтримання заданого рівня води в БС 1 парового котла-охолоджувача газовідвідного тракту конвертера (не показані). БС 1 трубопроводом циркуляційної води 2 з'єднаний через циркуляційні насоси 3 і зворотний клапан 4 з входами нагрівальних поверхонь 5 парового котла-охолоджувача (не показаний), при цьому виходи нагрівальних поверхонь 5 з'єднані трубопроводом пароводяної суміші 6 з БС 1. БС 1 паропроводом 7 через парову засувку 8 з'єднаний із загальним паровим колектором 9, наприклад із загальноцеховим паропроводом. Крім цього, БС 1 через засувку 10 і РК 11 з'єднаний з лінією живильної води 12. При цьому БС 1 обладнаний датчиком 13 рівня води, лінія живильної води 12 обладнана датчиком 14 витрати живильної води, а РК 11 обладнаний датчиком 15 положення, датчиком 16 кінцевого положення "Закрито" і приймачем 17 команд "Більше"/"Менше". Автоматизована система містить ПЛК 18, з'єднаний електронною мережею Езернет 19а і 19 через мережевий комутатор 20 з АРМ оператора 21. ПЛК 18 електронною мережею Профібас 22 з'єднаний зі станцією вводу-виводу сигналів 23, яка обладнана модулем вхідних аналогових струмових сигналів 24, модулем вхідних дискретних сигналів 25 і модулем вихідних дискретних сигналів 26. Модуль 24 лінією аналогових струмових сигналів 24а з'єднаний з датчиком 13 рівня води в БС 1, лінією аналогових струмових сигналів 24б з'єднаний з датчиком 14 витрати живильної води в БС 1 і лінією аналогових струмових сигналів 24в з'єднаний з датчиком 15 положення РК 11. Модуль 25 лінією дискретних сигналів 25а з'єднаний з датчиком 16 кінцевого положення "Закрито" на РК 11. Модуль 26 лініями дискретних сигналів 26а і 26б з'єднаний з блоком ЕКК 27, який підключений до джерела живлення 28 і який підключений лініями команд 27а і 27б до приймача 17 команд "Більше"/"Менше" на РК 11. Автоматизована система, що заявляється, додатково обладнана мікроконтролером 29, наприклад мікроконтролером "LOGO!" (виробник Сіменс АГ, Німеччина), з вбудованими входами для аналогових струмових сигналів і дискретних сигналів та з вбудованими виходами 3 UA 114087 U 5 10 15 20 25 30 35 40 45 50 55 60 для дискретних сигналів, а також блоком ПСС 30, встановленим на лінії аналогових струмових сигналів 24а від датчика 13 рівня води в БС 1. Мікроконтролер 29 з'єднаний з АРМ оператора 21 та з ПЛК 18 електронною мережею Езернет 19б і 19 та 19б і 19а через мережевий комутатор 20. Мікроконтролер 29 з'єднаний по входу додатковою лінією дискретних сигналів 26в з модулем вихідних дискретних сигналів 26 станції вводу-виводу сигналів 23, додатковою лінією аналогових струмових сигналів 24а' з блоком ПСС 30, додатковою лінією дискретних сигналів 25а' з датчиком 16 кінцевого положення "Закрито" на РК 11, наприклад, шляхом її під'єднання до лінії 25а. При цьому мікроконтролер 29 з'єднаний по виходу додатковими лініями дискретних сигналів 29а і 29б з блоком ЕКК 27. Процес охолодження конвертерних газів полягає в заборі за допомогою циркуляційних насосів 3 з БС 1 циркуляційної води і її подачі трубопроводом 2 через зворотний клапан 4 на вхід нагрівальних поверхонь 5 котла-охолоджувача конвертерних газів газовідвідного тракту конвертера (не показані). Проходячи через нагрівальні поверхні 5, циркуляційна вода нагрівається гарячими конвертерними газами, і пароводяна суміш, що утворюється в результаті нагрівання, трубопроводом 6 направляється в БС 1. У БС 1 відбувається поділ пароводяної суміші на пар, який відводиться паропроводом 7 через парову засувку 8 до загального парового колектору 9, і воду, яка повторно забирається циркуляційними насосами 3. У процесі охолодження конвертерних газів за допомогою нагрівальних поверхонь 5 парового котла-охолоджувача газовідвідного тракту конвертера (не показані) в БС 1 відбувається постійна зміна рівня води. В результаті зміни технологічного процесу конвертерної плавки рівень води в БС 1 може істотно зростати, наприклад на початку продувки або в разі збільшення інтенсивності продувки конвертера киснем і підвищення пароутворення в нагрівальних поверхнях 5, або істотно зменшуватися, наприклад в разі припинення продувки або зниження інтенсивності продувки конвертера киснем і зменшення пароутворення в нагрівальних поверхнях 5. Підтримання заданого рівня води в БС 1 здійснюється за рахунок збільшення або зменшення подачі живильної води з лінії живильної води 12 шляхом відкриття або закриття РК 11. Для керування РК 11 і призначена система, що заявляється. У конкретному прикладі виконання автоматизована система, що заявляється, працює в такий спосіб. Сигнали від датчика 13 про рівень води в БС 1, від датчика 14 про витрату живильної води, яка подається в БС 1 з лини живильної води 12, і від датчика 15 про положення РК 11 лініями аналогових струмових сигналів 24а, 24б та 24в, відповідно, надходять на вхід модуля вхідних аналогових струмових сигналів 24 станції вводу-виводу 23, а сигнали від датчика 16 про те, чи знаходиться РК 11 в кінцевому положенні "Закрито" чи ні, лінією дискретних сигналів 25а надходять на вхід модуля вхідних дискретних сигналів 25 станції вводу-виводу 23. Сигнали від датчика 13 надходять через блок ПСС 30, який забезпечує передачу двох рівноцінних аналогових струмових сигналів лінією 24а на вхід модуля 24 і лінією 24а' на вхід мікроконтролера 29. В станції вводу-виводу 23 відбувається перетворення отриманих сигналів і подальше спрямування даних електронною мережею Профібас 22 вПЛК 18. В ПЛК 18, згідно зі встановленим програмним забезпеченням, відбувається обробка цих даних і вироблення керуючих сигналів для РК 11. Оброблені дані від ПЛК 18 електронною мережею Езернет 19а надсилаються на мережевий комутатор 20 і далі електронною мережею Езернет 19 направляються на АРМ оператора 21, де відбувається їхня візуалізація на моніторі. На моніторі АРМ оператора 21 відбувається відображення технологічних параметрів і діагностичної інформації, сигналізації з нештатних ситуацій, автоматичного захисту по аварійних і критичних технологічних параметрах. Згідно із встановленим програмним забезпеченням, керування РК 11 відбувається в автоматичному режимі, при цьому оператор з АРМ 21 може коригувати його роботу або здійснювати керування в ручному режимі (через ПЛК 18). У цьому випадку сигнали з АРМ оператора 21 електронною мережею Езернет 19 направляються на мережевий комутатор 20 і надсилаються електронною мережею Езернет 19а в ПЛК 18, де відбувається їхня обробка і вироблення керуючих сигналів для РК 11. Керуючі сигнали від ПЛК 18 направляються електронною мережею Профібас 22 в станцію вводу-виводу 23, перетворюються і від модуля вихідних дискретних сигналів 26 лініями дискретних сигналів 26а або 26б надходять в блок ЕКК 27. Наприклад, лінією 26а направляється дискретний сигнал "Більше" на відкривання РК 11 на задану величину, забезпечуючи збільшення витрати живильної води на задану величину, а лінією 26б направляється дискретний сигнал "Менше" на закривання РК 11 на задану величину, забезпечуючи зменшення витрати живильної води на задану величину. Якщо дискретний 4 UA 114087 U 5 10 15 20 25 30 35 40 45 50 55 60 сигнал отримано по лінії 26а, то блок ЕКК 27 підключає джерело живлення 28 до лінії 27а команд "Більше", ця команда надходить на приймач команд "Більше" РК 11, який видає команду на відкривання РК 11, в результаті чого відбувається збільшення витрати живильної води і підняття рівня води в БС 1. Якщо дискретний сигнал отримано по лінії 26б, то блок ЕКК 27 підключає джерело живлення 28 до лінії 27б команд "Менше", ця команда надходить на приймач команд "Менше" РК 11, який видає команду на закривання РК 11, в результаті чого відбувається зменшення витрати живильної води і опускання рівня води в БС 1. В процесі роботи системи, що заявляється, може статися так, що ПЛК 18 вийде з ладу. В разі відмови ПЛК 18 РК 11 залишається в положенні, яке він займав на момент відмови ПЛК 18. Якщо РК 11 був закритий або його положення на момент відмови ПЛК 18 не забезпечувало необхідну витрату живильної води для підтримання безпечного рівня в БС 1, то може відбутися упускання рівня води в БС 1. Упускання рівня води в БС 1 призведе до того, що на вхід циркуляційних насосів З потраплятиме замість води вже неоднорідна пароводяна суміш, що, як правило, призводить до гідроударів в циркуляційних насосах та до їхнього виходу з ладу. В разі відмови ПЛК 18 монітори на АРМ оператора 21 не відображують реальну ситуацію, оператор не має можливості контролювати параметри і керувати РК 11. Для підтримання безпечного рівня води в БС 1 в разі відмови ПЛК 18 система, що заявляється, обладнана додатковим контуром керування РК 11 (тільки рівнем води в БС 1), який включає мікроконтролер 29 і блок ЕКК 27, а також блок ПСС 30. З цією метою в ПЛК 18, на основі отриманих даних від датчиків 15 і 16, здійснюється прогнозування часу руху РК 11 (для випадку відмови ПЛК 18 на наступному такті) з поточного положення в те положення, яке забезпечить безпечний рівень води в БС 1. Результати цього прогнозування електронною мережею Езернет 19а надсилаються на мережевий комутатор 20 і далі прямують електронною мережею Езернет 19б в мікроконтролер 29. Одночасно з цим в ПЛК 18 генерується сигнал "ПЛК працює", який електронною мережею Профібас надсилається в модуль вихідних дискретних сигналів 26 станції вводу-виводу 23 і лінією дискретних сигналів 26в направляється в мікроконтролер 29. Мікроконтролер 29 постійно контролює надходження від ПЛК 18 дискретного сигналу "ПЛК працює" і результатів прогнозування часу руху РК 11 з поточного положення в те положення, яке забезпечить безпечний рівень води в БС 1 на випадок відмови ПЛК 18. Сигнали про рівень води в БС 1 від датчика 13 надходять на блок ПСС 30, з якого лінією 24а направляються в станцію вводу-виводу сигналів 23, а лінією 24а' направляються в мікроконтролер 29, який їх обробляє, зберігає, а також надсилає електронною мережею Езернет 196 на мережевий комутатор 20 і далі електронною мережею Езернет 19 на АРМ оператора 21. Показання від мікроконтролера 29 про рівень води в БС 1 відображаються окремовід показань, отриманих від ПЛК 18. Дублювання показань рівня води в БС 1 необхідно на випадок відмови ПЛК 18, при якому показання від ПЛК 18 зникнуть, а показання від мікроконтролера 29 залишаться на екрані монітора АРМ оператора 21. Додатково від лінії 25а в мікроконтролер 29 лінією 25а' надходять сигнали від датчика 16. При надходженні лінією 26в дискретного сигналу "ПЛК працює" і електронною мережею 19а і 19б результатів прогнозування часу руху РК 11 з поточного положення в те положення, яке забезпечить безпечний рівень води в БС 1 на випадок відмови ПЛК 18, мікроконтролер 29 не формує ніяких команд і знаходиться в режимі очікування можливої відмови ПЛК 18. У разі відмови ПЛК 18 в мікроконтролер 29 перестануть надходити лінією 26в дискретний сигнал "ПЛК працює" і електронною мережею Езернет 19а і 19б сигнал про прогнозування положення РК 11. В разі відсутності зазначених сигналів мікроконтролер 29 бере керування РК 11 на себе і починає формувати дискретні сигнали на блок ЕКК 27 в залежності від значення рівня води в БС 1 на основі сигналів від датчика 13. Микроконтроллер 29 за виміряним рівнем води в БС 1 визначає, чи є необхідність у підживленні БС 1 з лінії живильної води 12. В разі низького рівня води в БС 1 мікроконтролер 29 формує і направляє лінією 29а дискретний сигнал на блок ЕКК 27, в якому відбувається підключення джерела живлення 28 до лінії команд 27а "Більше", далі команда "Більше" надходить на приймач 17 команд "Більше"/"Менше" РК 11, і відбувається часткове відкриття РК 11. Тривалість дискретного сигналу на відкриття РК 11, а відповідно тривалість команди "Більше", до положення, яке забезпечить безпечний рівень води в БС 1, визначалася ПЛК 18 завчасно перед його відмовою, а значення тривалості сигналу надходило електронною мережею Езернет 19а на мережевий комутатор 20 і далі електронною мережею Езернет 196 в мікроконтролер 29. РК 11 відкривається, живильна вода з лінії 12 надходить в БС 1, рівень води нормалізується. При високому рівні води в БС 1 необхідності у підживленні БС 1 немає, і мікроконтролер 29 формує і направляє лінією 29б дискретний сигнал на блок ЕКК 27, в якому відбувається 5 UA 114087 U 5 10 15 20 25 30 35 40 підключення джерела живлення 28 до лінії команд 27б "Менше", далі команда "Менше" надходить на приймач 17 команд "Більше"/"Менше" РК 11, і відбувається закривання РК 11, аж до його повного закриття і надходження на мікроконтролер 29 лінією 25а' дискретного сигналу від датчика 16 РК 11 "Закрито". В разі подальшого зниженні рівня води в БС 1, нижче допустимого, мікроконтролер 29 на підставі сигналу від датчика 13 формує і направляє лінією 29а дискретний сигнал на блок ЕКК 27, в якому відбувається підключення джерела живлення 28 до лінії команд 27а "Більше", далі команда "Більше" надходить на приймач 17 команд "Більше"/"Менше" РК 11, і відбувається відкриття РК 11 до необхідного значення, яке визначається заздалегідь записаною тривалістю видачі команди "Більше" від положення РК 11 "Закрито". Мікроконтролер 29 видасть команду на повне закриття РК 11 тоді, коли рівень води в БС 1 (на підставі сигналів від датчика 13) досягне значення, яке відповідає закриттю РК 11 до отримання сигналу від датчика 16 РК 11 "Закрито". Все це з мінімальними капітальними і експлуатаційними витратами, а також конструктивно і технологічно просто забезпечує підтримання безпечного рівня води в БС 1 в разі відмови ПЛК 18 для безаварійної роботи циркуляційних насосів за рахунок створення компактного додаткового контуру керування РК 11 в лінії 12 живильної води БС 1 із застосуванням всього двох додаткових елементів обладнання при відносно невеликій кількості додаткових комунікаційних з'єднань. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Автоматизована система підтримання рівня води в барабані-сепараторі парового котлаохолоджувача газовідвідного тракту конвертера, що містить програмований логічний контролер (ПЛК), з'єднаний з автоматизованим робочим місцем (АРМ) оператора електронною мережею Езернет через мережевий комутатор, станцію вводу-виводу сигналів, яка з'єднана з ПЛК електронною мережею Профібас і яка обладнана модулем вхідних аналогових струмових сигналів, з'єднаним лініями аналогових струмових сигналів з датчиком рівня води в барабанісепараторі (БС), з датчиком витрати живильної води в БС, з датчиком положення регулювального клапана (РК) в лінії живильної води БС, модулем вхідних дискретних сигналів, з'єднаним лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, і модулем вихідних дискретних сигналів, з'єднаним лініями дискретних сигналів з блоком електронних керованих ключів (ЕКК), що підключений лініями команд до приймача команд "Більше"/"Менше"" на РК, яка відрізняється тим, що вона додатково обладнана мікроконтролером з вбудованими входами для аналогових струмових сигналів і дискретних сигналів та з вбудованими виходами для дискретних сигналів, блоком повторювачів струмових сигналів (ПСС), встановленим на лінії аналогових струмових сигналів від датчика рівня води в БС, при цьому мікроконтролер з'єднаний з АРМ оператора і з ПЛК електронною мережею Езернет через мережевий комутатор, а також з'єднаний по входу додатковою лінією дискретних сигналів з модулем вихідних дискретних сигналів станції вводу-виводу сигналів, додатковою лінією аналогових струмових сигналів з блоком ПСС, додатковою лінією дискретних сигналів з датчиком кінцевого положення "Закрито" на РК, з'єднаний по виходу додатковими лініями дискретних сигналів з блоком ЕКК. 6 UA 114087 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 19/00
Мітки: тракту, автоматизована, конвертера, система, підтримання, газовідвідного, барабані-сепараторі, води, парового, рівня, котла-охолоджувача
Код посилання
<a href="https://ua.patents.su/9-114087-avtomatizovana-sistema-pidtrimannya-rivnya-vodi-v-barabani-separatori-parovogo-kotla-okholodzhuvacha-gazovidvidnogo-traktu-konvertera.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система підтримання рівня води в барабані-сепараторі парового котла-охолоджувача газовідвідного тракту конвертера</a>
Спосіб вимірювання рівня води в барабані парогенератора
Номер патенту: 28756
Опубліковано: 25.12.2007
Автори: Брук Валерій Аркадійович, Борбульов Станіслав Ігоревич, Васильєв Валерій Матвійович
МПК: G01F 23/14
Мітки: вимірювання, барабані, парогенератора, спосіб, води, рівня
Формула / Реферат:
Спосіб вимірювання рівня води в барабані парогенератора, заснований на вимірюванні різниці тисків між плюсовою і мінусовою камерами диференційного манометра, мінусова камера котрого сполучається з барабаном парогенератора на висоті, що відповідає мінімальному вимірюваному рівню води в барабані, а плюсова камера через однокамерну зрівнювальну посудину сполучається з барабаном парогенератора на висоті, що відповідає максимальному вимірюваному...
Спосіб вимірювання рівня води в барабані парогенератора і пристрій для здійснення способу
Номер патенту: 85762
Опубліковано: 25.02.2009
Автори: Борбульов Станіслав Ігоревич, Васильєв Валерій Матвійович, Брук Валерій Аркадійович
МПК: G01F 23/14
Мітки: пристрій, здійснення, води, парогенератора, рівня, барабані, спосіб, вимірювання, способу
Формула / Реферат:
1. Спосіб вимірювання рівня води в барабані парогенератора, заснований на вимірюванні різниці тисків між плюсовою і мінусовою камерами диференційного манометра, мінусова камера котрого сполучається з барабаном парогенератора на висоті, що відповідає мінімальному вимірюваному рівню води в барабані, а плюсова камера через однокамерну зрівнювальну посудину сполучається з барабаном парогенератора на висоті, що відповідає максимальному...
Система підтримання екологічної рівноваги водоймища-охолоджувача переважно теплових або атомної електростанції

Номер патенту: 8527
Опубліковано: 30.09.1996
Автори: Сотніков Василь Миколайович, Каднікова Маргарита Глєбовна, Ільєвський Альберт Вікторович, Васенко Олександр Георгієвич
МПК: C02F 3/32
Мітки: теплових, рівноваги, система, екологічної, водоймища-охолоджувача, підтримання, атомної, електростанції, переважно
Система автоматичного контролю і підтримання рівня електроліту в акумуляторних батареях гібридної силової установки
Номер патенту: 60865
Опубліковано: 25.06.2011
Автор: Міщенко Микола Володимирович
МПК: G05B 13/02, H01M 10/42
Мітки: установки, електроліту, акумуляторних, рівня, підтримання, система, автоматичного, гібридної, контролю, батареях, силової
Формула / Реферат:
Система автоматичного контролю і підтримання рівня електроліту в акумуляторних батареях гібридної силової установки, що містить датчики контролю рівня електроліту, сполучені з контролером, яка відрізняється тим, що включає ємність з дистильованою водою, яка сполучена з секціями акумуляторної батареї за допомогою трубопроводів, обладнаних електромагнітними запірними клапанами, які сполучені з контролером.
Колектор газовідвідного тракту запилених газів
Номер патенту: 50146
Опубліковано: 15.10.2002
Автори: Малина Віктор Володимирович, Маханько Анатолій Васильович, Зернюков Сергій Єгорович, Савченко Олександр Васильович, Смирний Володимир Григорович, Серебряник Григорій Ісаакович, Гармаш Микола Іларіонович, Грушевський Михайло Олександрович, Базарний Валентин Данилович
МПК: B01D 45/12, F27B 21/00
Мітки: газовідвідного, тракту, колектор, газів, запилених
Формула / Реферат:
Колектор газовідвідного тракту запилених газів, наприклад агломераційної машини, що містить ділянки підвищеної запиленості з пиловими бункерами і тангенціально підведеними газоводами, газовідвід від колектора, який відрізняється тим, що між ділянками підвищеної запиленості колектор виконаний з перепадом поперечного перерізу.
Попередній патент: Пристрій для заміни робочих і опорних валків кліті кварто
Наступний патент: Система підігріву газового редуктора-випарника
Випадковий патент: Установка для приготування емульсії