Керування електричними колами живлення споживачів за допомогою кодового сигналу
Формула / Реферат
1. Спосіб керування електричними колами живлення споживачів за допомогою кодового сигналу, який полягає у тому, що до спільної шини живлення (ШЖ) та шини керування (ШУ), яка є реалізована на ШЖ або окремим дротовим, волоконно-оптичним чи радіоканалом передачі кодового сигналу (кадру), паралельно приєднуються центральний керуючий комп'ютер (ЦКК), мікроконтролери (МК) споживачів з відповідними споживачами, МК датчиків (датчики, перемикачі, реле тощо) з відповідними датчиками, який відрізняється тим, що керування споживачами здійснюється ЦКК по ШУ послідовним опитуванням МК датчиків від першого до останнього, згідно з таблицею послідовності опитування датчиків (ТПО), записаній у постійній пам'яті ЦКК, для нього ЦКК генерує та видає у ШУ кадр-запит про стан МК датчика, МК датчика по отриманню адресованого йому кадру-запиту видає у ШУ кадр-відповідь, де в залежності від вибраного алгоритму обробки кадру-відповіді МК споживача одразу переводить споживача у відповідний стан або чекає на відповідну вказівку від ЦКК, по завершенні ЦКК обслуговування поточного МК датчика та пов'язаного з ним МК споживача (споживачів) ЦКК переходить до опитування наступного у ТПО МК датчика, по завершенні обслуговування ЦКК останнього у списку ТПО МК датчика ЦКК переходить до опитування МК датчика з першим номером у ТПО, повторюючи цикл опитування спочатку.
2. Спосіб за п.1, який відрізняється тим, що ЦКК забезпечує формування та передачу кодових сигналів (кадрів) в ШУ, прийом та обробку отриманих кадрів з ШУ, при цьому містить у внутрішній постійній пам'яті інформацію про власну внутрішню адресу, містить у внутрішній постійній пам'яті інформацію про внутрішню адресу та можливі стани кожного МК приєднаного до системи, ТПО, алгоритм роботи з МК датчиків та споживачів, алгоритм тестування системи з можливістю передачі результатів тестування до нейтрального комп'ютера системи або виведенням необхідної інформації на екран користувача, генерує в ШУ тактові імпульси для синхронізації передачі даних між ЦКК та МК, які одночасно є синхроімпульсами електронних цифрових схем МК датчиків та споживачів, ЦКК перманентно має право на передачу кадру в ШУ (маркером) а також монопольно має право передачі маркера відповідному МК, тільки на визначений час для передачі фіксованої кількості кадрів, забезпечує повторну передачу кадру у разі помилки передачі або втрати кадру, забезпечує аварійну роботу системи при виявленні помилок чи несправностей в роботі МК, датчиків, споживачів, ШУ, формує та передає відповідний звіт про помилку до центрального комп'ютера системи або виводить необхідну інформацію на екран користувача.
3. Спосіб за п. 1, який відрізняється тим, що МК формує та передає кадри в ШУ на основі даних (аналогових чи дискретних), поданих приєднаним до нього датчиком чи споживачем, приймає та обробляє отримані кадри з ШУ з подальшим встановленням споживача (споживачів) у необхідний стан (стосується МК споживачів), при цьому містить у внутрішній постійній пам'яті інформацію про власну внутрішню адресу, містить алгоритм внутрішнього тестування приєднаного до МК датчика чи споживача.
Текст
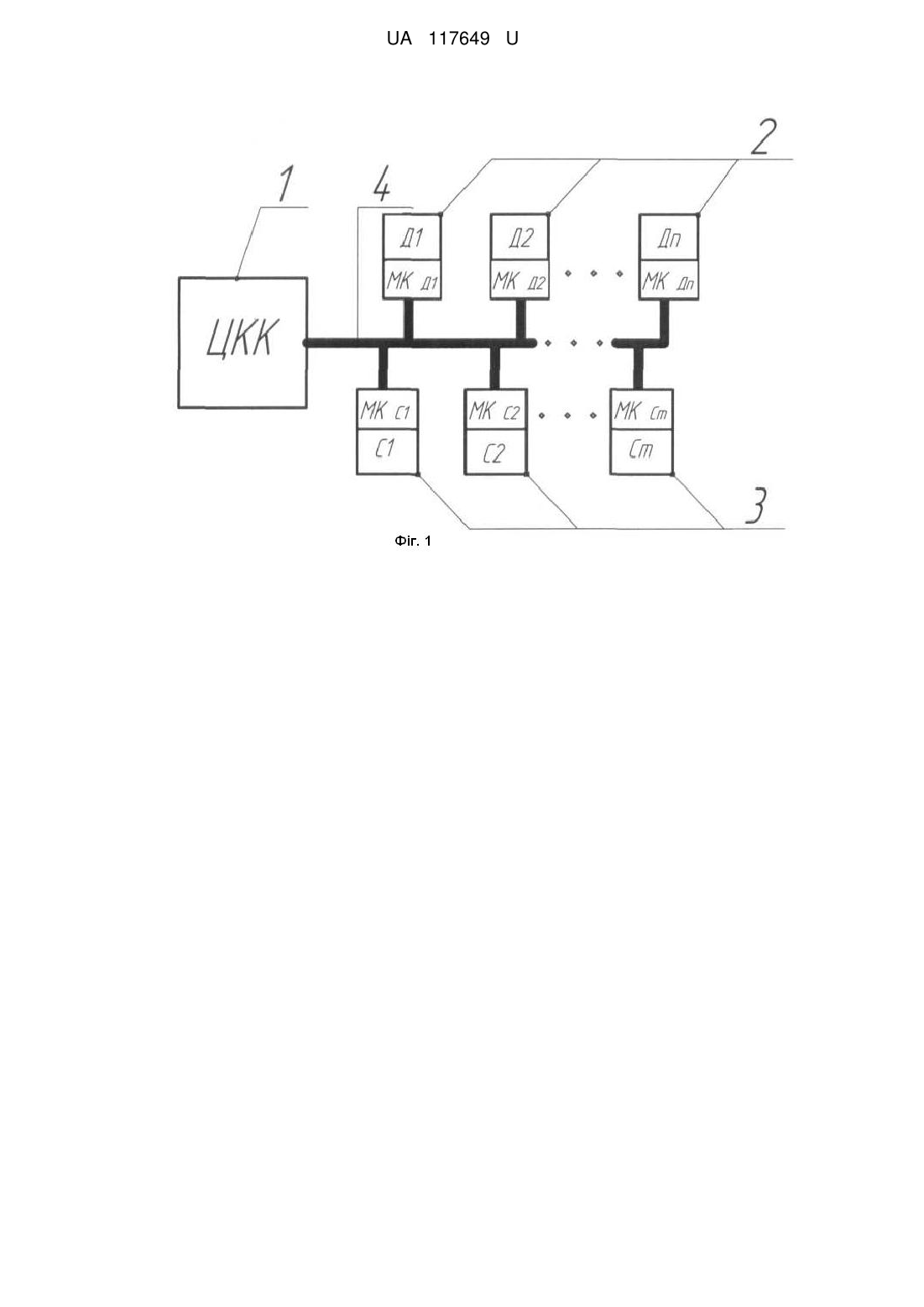
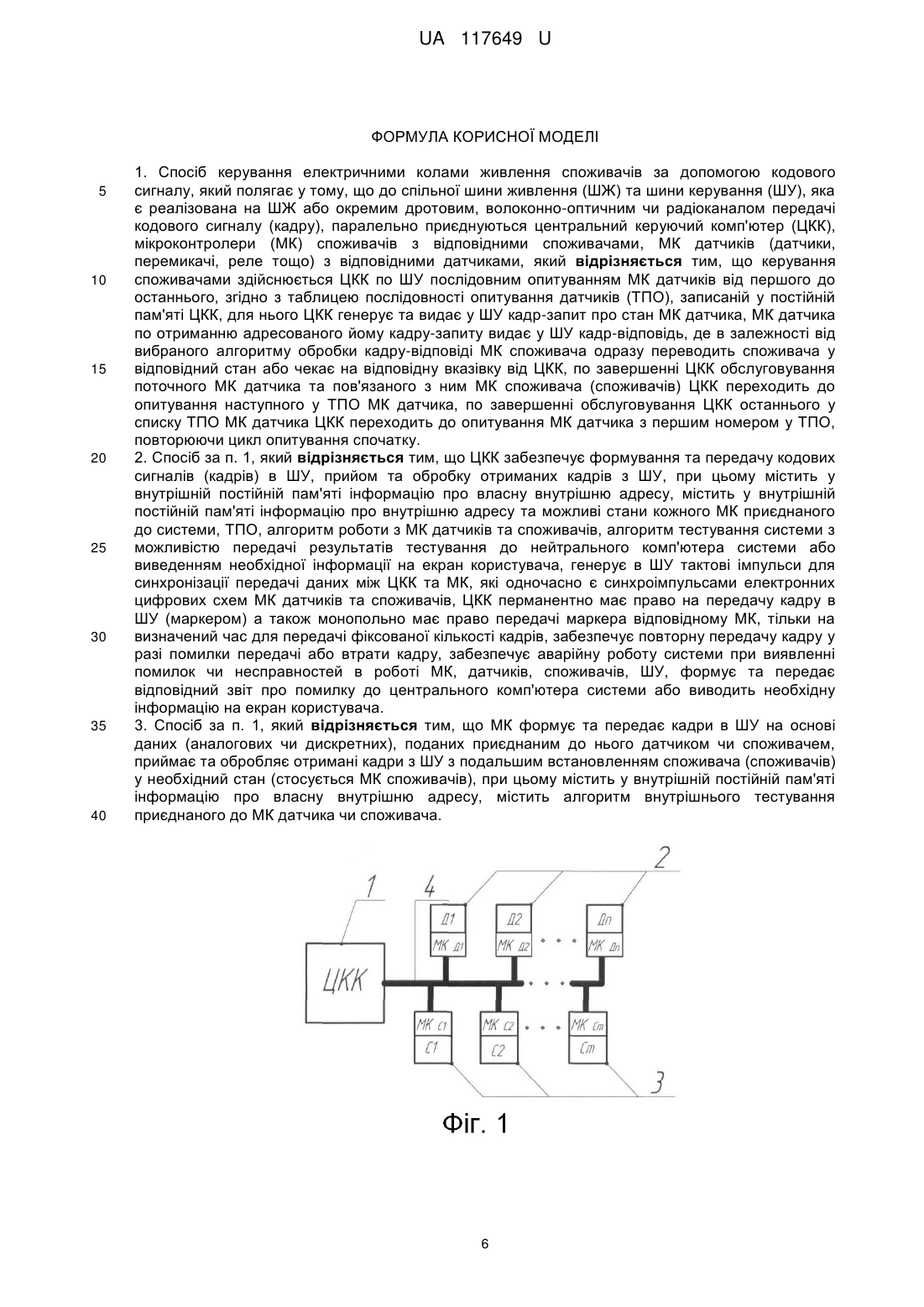
Реферат: Спосіб керування електричними колами живлення споживачів за допомогою кодового сигналу полягає у тому, що до спільної шини живлення (ШЖ) та шини керування (ШУ), яка є реалізована на ШЖ або окремим дротовим, волоконно-оптичним чи радіоканалом передачі кодового сигналу (кадру), паралельно приєднуються центральний керуючий комп'ютер (ЦКК), мікроконтролери (МК) споживачів з відповідними споживачами, МК датчиків (датчики, перемикачі, реле тощо) з відповідними датчиками. При цьому керування споживачами здійснюється ЦКК по ШУ послідовним опитуванням МК датчиків від першого до останнього, згідно з таблицею послідовності опитування датчиків (ТПО), записаній у постійній пам'яті ЦКК, для нього ЦКК генерує та видає у ШУ кадр-запит про стан МК датчика, МК датчика по отриманню адресованого йому кадру-запиту видає у ШУ кадр-відповідь, де в залежності від вибраного алгоритму обробки кадру-відповіді МК споживача одразу переводить споживача у відповідний стан або чекає на відповідну вказівку від ЦКК. UA 117649 U (54) КЕРУВАННЯ ЕЛЕКТРИЧНИМИ КОЛАМИ ЖИВЛЕННЯ СПОЖИВАЧІВ ЗА ДОПОМОГОЮ КОДОВОГО СИГНАЛУ UA 117649 U UA 117649 U 5 10 15 20 25 30 35 40 45 50 55 60 Даною корисною моделлю є спосіб керування електричними колами живлення споживачів за допомогою кодового сигналу від центрального керуючого комп'ютера (диспетчера) та мікроконтролерів групи датчиків (датчики, перемикачі, реле тощо), далі спосіб керування. На відміну від звичайного "паралельного" способу керування споживачами системи, де кожен споживач з відповідною групою датчиків утворює незалежне коло електричного живлення, і в якому керування всіма споживачами може здійснюватись незалежно один від одного у будьякий момент часу, запропонований спосіб здійснює послідовне керування споживачами системи, тобто тільки одним споживачем у визначений момент часу, по одній загальній для всіх споживачів шині живлення та керування. Даний спосіб керування електричними споживачами можна здійснювати через мережу живлення споживачів з постійною та змінною напругами живлення, або через окремий виділений канал керування (оптичний, електричний, радіоканал тощо). Тобто запропонований варіант керування споживачами є різновид PLC (Power Line Communication) системи. Єдиного стандарту для PLC систем на сьогодні не існує, хоча спроби уніфікувати системи моніторингу та керування по мережах живлення є. Крім цього PLC передбачає передачу інформації та керування через мережі змінного струму з частотою 50/60 Гц, на відміну від запропонованого способу керування по мережі постійного струму. Найближчими аналогами до запропонованого способу керування, відомими автору з рівня техніки є: - X10 міжнародний відкритий промисловий стандарт, який застосовується для зв'язку між пристроями у домашніх системах автоматизації; - 1-Wire двонапрямлена шина зв'язку для пристроїв з низькошвидкісною передачею даних (до 125 Кбіт/с) особливістю якої є те, що дані та живлення передаються спільно по дводротовій системі, або тільки дані, а живлення окремою лінією. - EIB/KNX - комунікаційна шина, широко використовувана для автоматизації будівель. Всі вище перелічені стандарти реалізовані за принципом PLC, тобто передача даних здійснюється безпосередньо по лініях мережі живлення. Одним загальним недоліком цих систем є низька швидкість передачі даних до 125 Кбіт/с, зумовлена задачами, для яких ці стандарти розроблялись та реальною фізичною спроможністю силових мереж передавати високочастотний інформаційний сигнал. Іншою групою промислових стандартів для автоматизації різноманітних задач та процесів з високим ступенем швидкодії (100 Мбіт/с і більше) є такі системні шини систем управління, як: PROFINET, PROFIBUS, EtherCAT. Особливістю даних систем є те, що фізично вони являють собою довільну топологію (шина, кільце, зірка, дерево), але їхня логічна топологія є кільце. Це зумовлено перш за все характером опитування вузлів та взаємодії між вузлами, які беруть участь у даній мережі. Зазвичай ці системні шини є окремо реалізованими від мереж живлення на відміну від запропонованого способу. Пріоритетною сферою застосування даного способу керування в першу чергу є транспортні засоби різних типів: автомобільний, водний, повітряний, рейковий тощо. Також дану корисну модель можна застосовувати у військовій техніці. Даний спосіб керування електричними споживачами також можна застосовувати в спорудах та складних пристроях (системах), де їх окремі електричні споживачі можуть бути між собою пов'язані однією шиною живлення або спільною шиною керування при компактному розташуванні компонентів системи. Як відомо, у сучасних транспортних засобах електрична проводка сягає сотень і тисяч метрів. Така велика кількість проводів зумовлена необхідністю керувати кожним окремим споживачем по окремому електричному колу живлення, вмикаючи та вимикаючи його в певний момент часу. Як наслідок, ризик обривів та коротких замикань у проводці значно зростає. Велика кількість проводів вимагає використання складної системи маркувань кожного проводу, використання великої кількості різноманітних роз'ємів для підключення споживачів до електропроводки, об'єднання окремих проводів у джгути та шини, використання додаткового простору для розміщення електропроводки у транспортному засобі. Велика кількість проводів та роз'ємів електропроводки, складність проектування, трудоємкість її виготовлення та інсталяції значно здорожують кінцевий виріб та збільшують його масу. Також сюди слід додати складність діагностики та ремонту такої електропроводки. [Призначення] Даний спосіб дозволяє здійснювати живлення та керування всіма споживачами системи центральним керуючим комп'ютером (ЦКК) по спільній шині живлення та спільній шині керування, приєднавши до них через мікроконтролери (МК) всі перемикачі, датчики, реле, споживачі тощо, тобто всі термінальні елементи електропроводки (ТЕП). Таким чином вся електропроводка системи зводиться до двопроводової кабельної системи “плюс”/”мінус” при живленні постійним струмом або фаза/нуль, фаза/фаза при використанні систем зі змінним 1 UA 117649 U 5 10 15 20 25 30 35 40 45 50 55 60 струмом, а всі ТЕП та ЦКК приєднуються до шини живлення паралельно (фіг. 1). Отримання сигналів керування від перемикачів, датчиків, реле та керування всіма споживачами здійснюється або по шині живлення або по окремій керуючій шині радіо-, оптоволоконному чи дротовому каналу зв'язку. Для прикладу, на транспорті з постійним струмом живлення, а також керування всіма електричними компонентами системи можна здійснювати одним "плюсовим" проводом, оскільки "мінусовий" провід (маса) від джерела живлення подається на металевий корпус (кузов) транспортного засобу і є доступним в будь-якій його частині. Таким чином, вся електропроводка зводиться до однієї спільної магістральної однопроводової "плюсової" шини та локальних "від'ємних" шин (маса), "взятих" з корпусу. [Переваги] Даний спосіб керування дозволяє зменшити обсяги електропроводки у десятки і сотні разів, використовувати однотипні роз'єми, розгалужувані та конектори для всіх TЕП. Використання одного або декількох кабелів для живлення та керування ТЕП суттєво спрощує маркування електропроводки. Паралельне (фідерне) приєднання всіх ТЕП у будь-якому місці шини живлення дозволяє взагалі відмовитись від карт електропроводки та схем підключення окремих ТЕП. Даний спосіб значно зменшує ймовірність обривів або короткого замикання окремих проводів, спрощує діагностику та усунення несправностей електропроводки. Дає можливість реалізації автоматичної діагностики кожного ТЕП центральним керуючим комп’ютером (диспетчером) з виводом всіх виявлених несправностей на монітор оператора чи екран бортового комп'ютера транспортного засобу. На фіг. 1 та 2 зображені: центральний керуючий комп'ютер (ЦКК) 1, який складається з центрального процесора (ЦП) 2 та диспетчера (ДП) 3, блока датчиків (датчики, перемикачі, реле) (Д) 4, блока споживачів (С) 5, шини живлення та керування 6. На фіг. 1 схема фізичного під'єднання блоків до шини живлення та керування, на фіг. 2 зображені логічні взаємозв'язки між блоками системи. [Принцип роботи логічна частина] У постійній пам'яті ЦКК записана таблиця всіх наявних датчиків (Д) та споживачів (С), перелік всіх значень параметрів або станів яких вони можуть набувати в процесі роботи та їхні початкові значення та етапи, таблиця послідовності опитування датчиків (ТПО), алгоритм самотестування системи. При ввімкненні системи відбувається операція самотестування системи. ЦКК послідовно опитує кожен датчик (Д) та відповідно до параметрів відповіді датчика встановлює відповідний споживач або групу споживачів, з якими цей датчик пов'язаний, у певний визначений стан, а потім опитує решту споживачів, які ще не були задіяні у тестуванні. Набір та послідовність операцій самотестування визначається розробником системи та може бути відмінною від наведеної, наприклад, послідовне опитування всіх споживачів, а потім датчиків з подальшим їх встановленням у початковий стан. Далі система переходить в робочий режим, під час якого ЦКК згідно з ТПО опитує кожен датчик та порівнює отримані від нього дані з попередніми (записаними в оперативну пам'ять ЦКК). Якщо отримані від датчика дані не відрізняються від попередніх, то ЦКК може або перейти до опитування наступного датчика або спочатку повторно встановити відповідного споживача у стан, який відповідає значенню, отриманому від датчика, а потім перейти до опитування наступного датчика. Останній алгоритм вимагає більше машинних операцій та затраченого на них часу, проте гарантує повторне ввімкнення споживача, якщо з причини якогось збою споживач не був ввімкнений у відповідний стан минулого разу. Якщо отримані від датчика дані відрізняються від попередніх, то ЦКК перемикає відповідного споживача у новий стан, а потім переходить до опитування наступного датчика. По досягненні ЦКК останньої позиції ТПО цикл опитування завершується, ЦКК переходить на початок ТПО, повторюючи цикл опитування заново, забезпечуючи безперервне виконання алгоритму опитування протягом усього часу роботи системи. Послідовність опитування, кількість звернень та інтервали між зверненнями ЦКК до кожного окремого датчика протягом одного циклу ТПО визначається розробником системи. [Принцип роботи фізична частина] Центральний керуючий комп'ютер (ЦКК, датчики та споживачі системи пїд'єднуються до однієї спільної шини керування (ШК) як показано на фіг. 2. Опитування датчиків здійснює ЦКК, керування споживачами здійснює ЦКК або датчик, котрий відповідає даному споживачу. Для цього ЦКК формує та видає у ШК відповідний кодовий сигнал (кадр)- послідовність бінарних символів визначеного формату. Кадр, переданий в ШК, обов'язково містить адресу конкретного адресата та інформацію, яку адресат повинен обробити. Кадр, переданий ЦКК в ШК, зчитують всі МК датчиків та МК споживачів одночасно. Приймають кадр до виконання тільки ті адресати, власна адреса котрих збігається з адресою, вказаною в полі адреса отримувача (АО) кадру. ЦКК може формувати унікальні, тобто тільки для одного конкретного адресата, та групові кадри. 2 UA 117649 U 5 Кадр може бути з відповіддю або без відповіді. Кадр з відповіддю вимагає від адресата підтвердження виконання прийнятого кадру (для споживачів) або надання інформації про свій стан (для датчиків). Кадр з відповіддю може бути застосований тільки для одного конкретного адресату (унікальний кадр) і не може бути застосований для групи адресатів, оскільки в такому випадку невідомо кому віддати пріоритет на відповідь. Кадр без відповіді може бути унікальним або груповим і дає вказівку одному або декільком адресатам виконати певну дію але не вимагає підтвердження її виконання. Як наводилось вище функцію передачі кадру до споживача може взяти на себе відповідний датчик, за умови дозволу ЦКК Формат кадру може бути наступного виду: 10 Таблиця 1 15 20 25 30 35 40 45 50 55 Преамбула ПО КК АО АВ Блок даних КПК КО (8-16 біт) (8 біт) (8 біт) (16-48 біт) (16-48 біт) (8-80 біт) (8-32 біт) (8 біт) , де зазначено: Преамбула - бітова комбінація, яка при потребі включається в кадр для синхронізації передавача та приймача, забезпечення мінімального проміжку часу для обробки отримувачем прийнятого кадру або інших службових цілей. ПО (початковий обмежувач) - певна визначена комбінація сигналів завжди відмінна від сигналів даних, необхідна для визначення початку кадру. КК (поле керування кадру) - визначає тип кадру, наприклад груповий чи унікальний, з відповіддю чи без тощо. АО (адреса отримувача) - унікальна або групова адреса отримувача кадру АВ (адреса відправника) - унікальна адреса відправника кадру Блок даних - керуюча інформація або дані КПК - контрольна послідовність кадру КО (кінцевий обмежувач) - певна визначена комбінація сигналів завжди відмінна від сигналів даних, необхідна для визначення закінчення кадру, всі біти даних між ПО і КО охоплюються КПК. Кожен датчик та споживач являють собою власне сам датчик чи споживач електрично пов'язаний з відповідним мікроконтролером (МК). МК споживача повинен забезпечувати: прийом та обробку кадру з ШК, встановлення споживача у відповідний стан, вказаний у прийнятому кадрі, формування відповіді про отримання кадру, стан споживача, успішність виконання команди, здійснювати передачу кадру-відповіді в ШК, МК датчика повинен забезпечувати: прийом та обробку кадру з ШК, формування відповіді про стан датчика, перетворюючи при погребі аналогове значення величини зчитуваного параметра датчика у цифрове, здійснювати передачу кадру-відповіді ШК. Для синхронної роботи всіх МК системи ЦКК видає синхросигнал у ШК. Синхросигнал задає швидкість передачі інформації між ЦКК та МК, а також є тактовими імпульсами для роботи внутрішніх компонентів МК (тригери, регістри, АЦП тощо). Схожий принцип роботи мають локальні обчислювальні мережі (ЛОМ) з маркерним доступом до шини ГОСТ 34.913.4-91 (ISO 8802/4-88). Всі користувачі даного типу ЛОМ фізично приєднані до однієї спільної шини, всі активні учасники ЛОМ одночасно прослуховують ефір (передачу кадру іншої станції), проте тільки одна станція у визначений момент часу має право передачі кадру (тобто має "маркер" на передачу кадру), після передачі кадру станція передає "маркер" наступній станції по колу. Запропонований спосіб керування за фізичною топологією є шина (фіг. 1), а за логічною зірка (фіг. 2), а не кільце, як у вищенаведеній ЛОМ по ГОСТ 34.913.4-91 (ISO 8802/4-88). Також ЦКК перманентно має право на передачу кадру (маркером), звертаючись до потрібного МК та передаючи йому маркер для відповіді на відісланий запит. МК здійснивши передачу кадрувідповіді повертає маркер ЦКК, після чого ЦКК "опитує" наступний МК і так далі згідно з ТПО. Тобто запропонований спосіб керування за структурою звернень між одним ЦКК та багатьма МК є структурою Master-Slave a точніше one Master-many Slaves, а не Клієнт-Сервер (ЛОМ по ГОСТ 34.913.4-91), де кожна станція може бути як Клієнтом, так і Сервером. Запропонована структура звернень практично унеможливлює виникнення колізій, тобто ситуації, коли декілька станцій одночасно ведуть передачу сигналу. Запропонований спосіб керування доцільніше реалізовувати разом з електропроводкою системи на одній спільній шині живлення та керування. Для забезпечення перешкодозахищеності розробник може використовувати стійкі до перешкод екрановані кабелі, 3 UA 117649 U 5 спеціальне кодування кадру з виявленням помилки, та з можливістю виявлення та виправлення однієї або декількох помилок. У високозахищених та секретних системах (різноманітна військова техніка, стратегічні або критичні до помилок об'єкти тощо) керування ТЕП слід здійснювати по окремому волоконно-оптичному кабелю, що унеможливить витік інформації за межі системи та постановку перешкод у разі підключення до електричної проводки системи. Багатодротовий тип проводки, у якому для кожного споживача передбачене окреме коло живлення, час, необхідний для фізичного перемикання споживача з одного стану в інший, складається з: Таблиця 2 1. 2. часу затримки спрацьовування електричного контакту датчика (реле, перемикача тощо); часу реакції споживача (часу необхідного для переходу споживача з початкового стану у кінцевий). 10 Час фізичної затримки не повинен перевищувати допустимі межі, встановлені для кожного споживача. Ці затримки назвемо "аналоговими" затримками. При використанні запропонованої моделі керування час фізичної затримки складається з: Таблиця 3 1. 2. 3. 4. 5. 6. 7. 8. 9. часу затримки спрацьовування електричного контакту датчика (реле, перемикача тощо): часу обробки мікроконтролером датчика стану датчика та формуванню відповіді; час очікування черги опитування; часу формування та передачі ЦКК кадру, відповідному МК датчика; часу передачі МК датчика кадру-відповіді у ШК; часу обробки ЦКК кадру-відповіді від МК датчика, формування та передачу кадру МК споживача для переведення його у відповідний стан; часу обробки кадру МК споживача; часу реакції споживача (часу, необхідного для переходу споживача з початкового стану у кінцевий); часу для формування та передачі кадру-звіту про виконання МК споживача в ШК. 15 20 25 30 35 40 Запропонована модель, окрім "аналогових" затримок, містить ряд додаткових "цифрових" затримок, зумовлених очікуванням черги звернення, формуванням, обробкою та передачею необхідної кількості кадрів. Для оптимізації роботи слід суміщати паралельні в часі затримки для скорочення загального часу затримки. ЦКК повинен бути достатньо потужним щоб під час відправки одного кадру був сформований наступний кадр, МК датчиків та споживачів повинні формувати кадри-відповіді під час очікування черги опитування. Наприклад МК датчика під час очікування своєї черги опитування може сформувати кадр-відповідь про свій стан, суміститвши затримки 1-4 (таб. 3), за умови, що: 1+2
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: кодового, споживачів, колами, електричними, керування, живлення, допомогою, сигналу
Код посилання
<a href="https://ua.patents.su/9-117649-keruvannya-elektrichnimi-kolami-zhivlennya-spozhivachiv-za-dopomogoyu-kodovogo-signalu.html" target="_blank" rel="follow" title="База патентів України">Керування електричними колами живлення споживачів за допомогою кодового сигналу</a>
Пристрій системи керування та моніторингу споживачів електричної енергії
Номер патенту: 72128
Опубліковано: 10.08.2012
Автори: Таратухін Олександр Олександрович, Соколенко Богдан Валентинович, Полєтаєв Дмитро Олександрович, Дячук Владислав Сергійович
МПК: G01R 11/00, H02J 3/00, G01R 19/25
Мітки: енергії, електричної, пристрій, системі, споживачів, керування, моніторингу
Формула / Реферат:
Пристрій системи керування та моніторингу споживачів електричної енергії, що містить блок керування, який відрізняється тим, що додатково містить пристрій комутації споживачів електричної енергії, датчики струму та фази, датчик напруги, додаткові датчики, модуль прийому/передачі даних, енергонезалежну пам'ять, причому блок керування підключений до пристрою комутації споживачів електричної енергії, модуля прийому/передачі даних та...
Пристрій для автоматичного слідкування за частотою лінійними електричними колами
Номер патенту: 40428
Опубліковано: 10.04.2009
Автор: Туник Володимир Федотович
МПК: G05B 13/02, H03H 21/00
Мітки: колами, слідкування, лінійними, електричними, частотою, автоматичного, пристрій
Формула / Реферат:
1. Пристрій для автоматичного слідкування за частотою (АСЧ) лінійними електричними колами, який містить керований блок (КБ), петля зворотного керування якого містить послідовно з'єднані частотний дискримінатор (ЧД), згладжуючий фільтр нижніх частот (ЗФНЧ) і керуючий елемент (КЕ), вихід якого з'єднаний із входом керування КБ, вихід якого, будучи виходом пристрою АСЧ, з'єднаний із входом ЧД, який відрізняється тим, що КБ являє собою відомі...
Спосіб живлення споживачів електричної енергії від централізованої енергосистеми і відновлюваних джерел енергії
Номер патенту: 71470
Опубліковано: 10.07.2012
Автори: Кубкін Максим Володимирович, Сіріков Олександр Іванович, Солдатенко Валентин Петрович
МПК: H02J 3/00
Мітки: відновлюваних, спосіб, джерел, електричної, споживачів, живлення, енергії, централізовано, енергосистеми
Формула / Реферат:
Спосіб живлення споживачів електричної енергії від централізованої енергосистеми і відновлюваних джерел енергії, який полягає у тому, що споживачі живляться від централізованої енергосистеми та відновлюваних джерел енергії, які працюють паралельно, який відрізняється тим, що відновлювані джерела енергії підключені до однієї системи шин, централізована енергосистема підключена до другої системи шин, а споживачі електричної енергії за...
Пристрій для живлення споживачів постійним струмом
Номер патенту: 31251
Опубліковано: 15.12.2000
Автори: Бенсман Володимир Григорович, Дмитренок Юрій Вікторович, Будко Віктор Никифорович, Єльніцький Генадій Йосипович
МПК: H02J 7/34
Мітки: постійним, споживачів, живлення, струмом, пристрій
Текст:
...акумуляторів в батареї, спрощується експлуатація пристрою (не потрібні спеціальні дії оперативного персоналу, скеровані на постійний контроль стану акумуляторів), зменшується негативний вплив на ресурс акумуляторів. Зважаючи також на те, що активний опір кола дроселя має незначну величину, втрати енергії у цьому колі теж будуть незначні (у порівнянні з втратами енергії у колі реостата, який використовується у пристрої, що розглядається як...
Підзарядний пристрій для блоків живлення малопотужних споживачів живильної напруги
Номер патенту: 101038
Опубліковано: 25.08.2015
Автори: Руденко Тетяна Вікторівна, Куценко Віктор Ілліч, Ющенко Ірина Вікторівна
МПК: H01L 35/32, A44C 5/00, F24J 3/06, H01L 35/00
Мітки: малопотужних, пристрій, живлення, підзарядний, напруги, споживачів, блоків, живильної
Формула / Реферат:
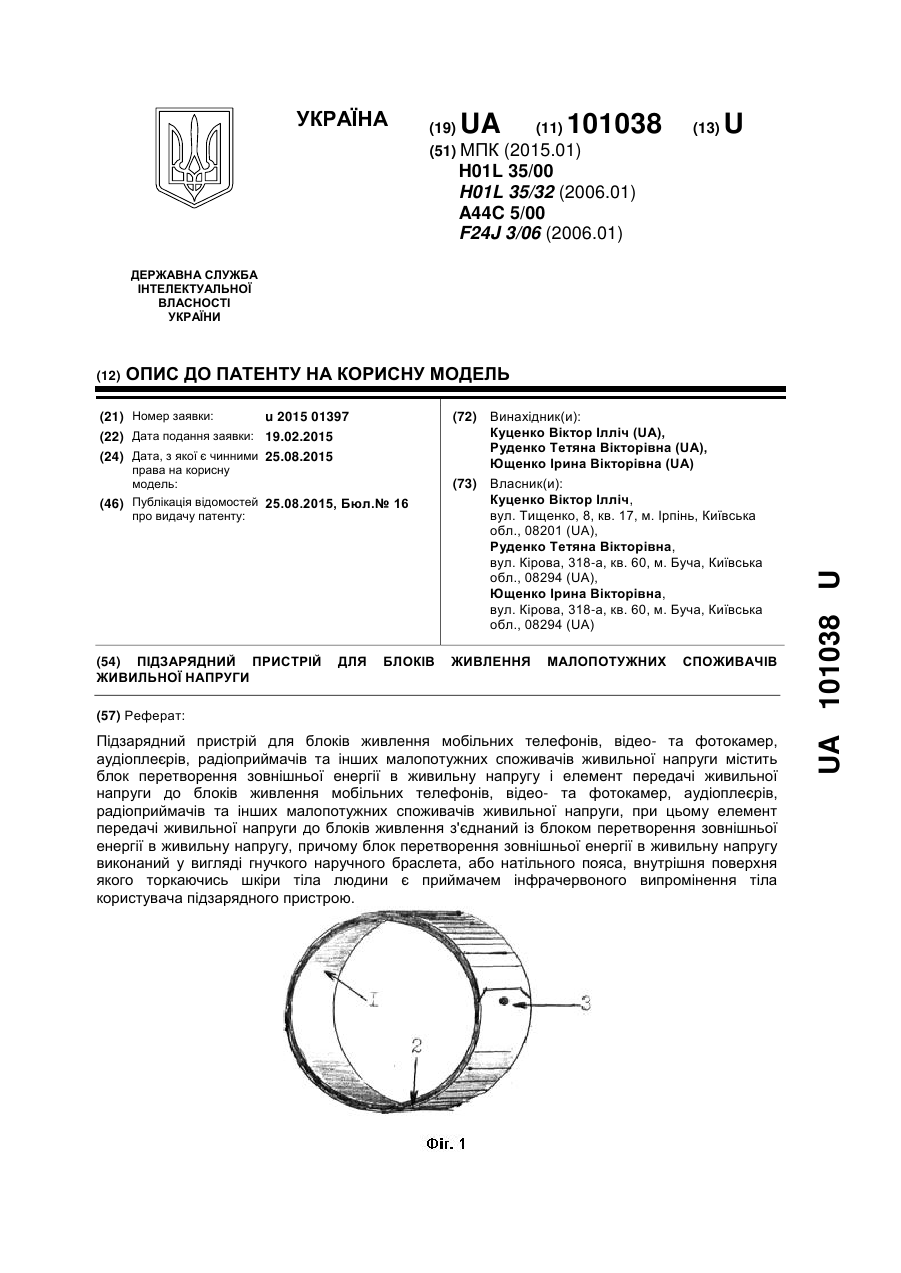
1. Підзарядний пристрій для блоків живлення мобільних телефонів, відео- та фотокамер, аудіоплеєрів, радіоприймачів та інших малопотужних споживачів живильної напруги, що містить блок перетворення зовнішньої енергії в живильну напругу і елемент передачі живильної напруги до блоків живлення мобільних телефонів, відео- та фотокамер, аудіоплеєрів, радіоприймачів та інших малопотужних споживачів живильної напруги, при цьому елемент передачі...
Попередній патент: Пристрій одночасного сумарного перетворення повітряних енергетичних потоків на їх різних горизонтальних висотах в електричну або інші види енергії
Наступний патент: Спосіб впливу на матерію-простір-час
Випадковий патент: Спосіб прогнозування перебігу невропатій у дітей