Спосіб формування навчальної вибірки прогнозуючої дрейф пристрою збору даних нейронної мережі
Номер патенту: 50830
Опубліковано: 15.11.2002
Автори: Лаопоулос Теодоре, Савіцький Юрій Вікторович, Турченко Володимир Олександрович, Саченко Анатолій Олексійович, Головко Володимир Адамович, Кочан Володимир Володимирович
Формула / Реферат
1. Спосіб формування навчальної вибірки прогнозуючої дрейф пристрою збору даних нейронної мережі, на основі періодичного визначення дійсного значення дрейфу і історичних даних про дрейф, який відрізняється тим, що об'єм даних при формуванні вибірки штучно збільшується шляхом формування вибірок даних послідовно для двох додаткових нейронних мереж - інтегруючої історичні дані і апроксимуючої.
2. Спосіб за п. 1, який відрізняється тим, що при формуванні вибірок даних для інтегруючої історичні дані нейронної мережі з наявних історичних даних про дрейф пристрою збору даних окремо для кожного моменту часу визначення дійсного значення їх дрейфу, для окремого варіанту інтегруючої історичні дані нейронної мережі формується вибірка даних, що складається з пар історичних значень дрейфу для одного пристрою збору даних в даному і наступному моменті часу визначення дрейфу.
3. Спосіб за п. 2, який відрізняється тим, що при формуванні навчальної вибірки для варіанту інтегруючої історичні дані нейронної мережі з сформованої вибірки даних формується набір навчальних векторів шляхом почергового виділення однієї пари історичних значень дрейфу і сортування всіх інших пар по відхиленню від значення дрейфу виділеної пари в даному моменті часу визначення дійсного значення дрейфу, причому вхідними елементами кожного навчального вектора є відсортовані значення дрейфу інших пар в даному моменті визначення дійсного значення дрейфу, а вихідним елементом цього навчального вектора є значення дрейфу виділеної пари в наступному моменті визначення дійсного значення дрейфу.
4. Спосіб за п. 1, який відрізняється тим, що при формуванні робочої вибірки для інтегруючої історичні дані нейронної мережі для кожного варіанту інтегруючої історичні дані нейронної мережі сортують пари історичних значень дрейфу по відхиленнях від значення дрейфу пристрою збору даних і відкидають пару з найбільшим відхиленням, причому як значення дрейфу пристрою збору даних використовується визначене дійсне значення дрейфу в даному моменті часу і прогнозовані відповідними варіантами інтегруючих історичні дані нейронних мереж значення дрейфу у всіх наступних моментах часу визначення дрейфу.
5. Спосіб за п. 1, який відрізняється тим, що при формуванні навчальної вибірки для апроксимуючої нейронної мережі в навчальній вибірці поєднуються визначені в попередніх і даному моменті часу дійсні значення дрейфу прогнозованого пристрою збору даних з результатами прогнозу значень дрейфу відповідними варіантами інтегруючих історичні дані нейронних мереж у всіх наступних моментах часу визначення дрейфу.
Текст
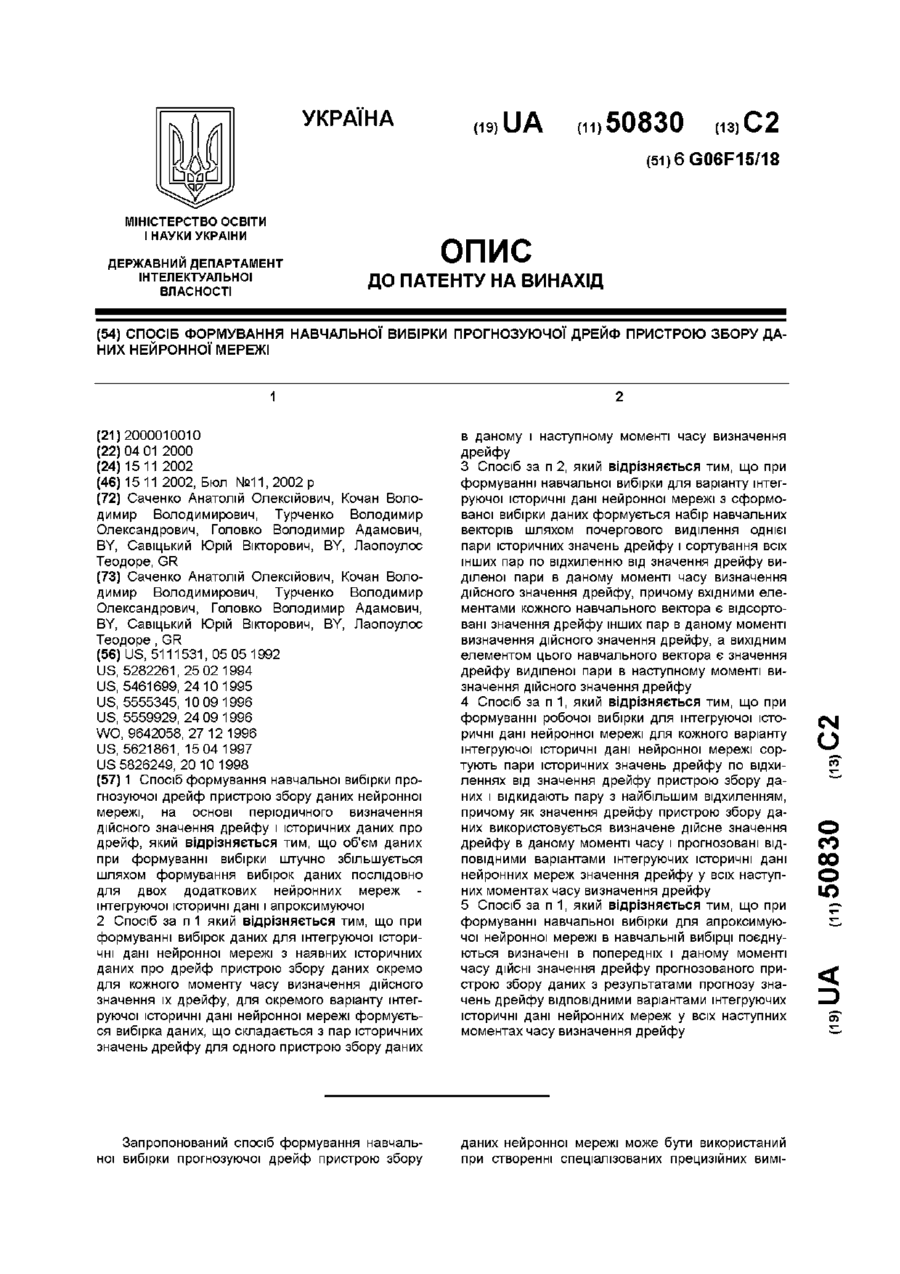
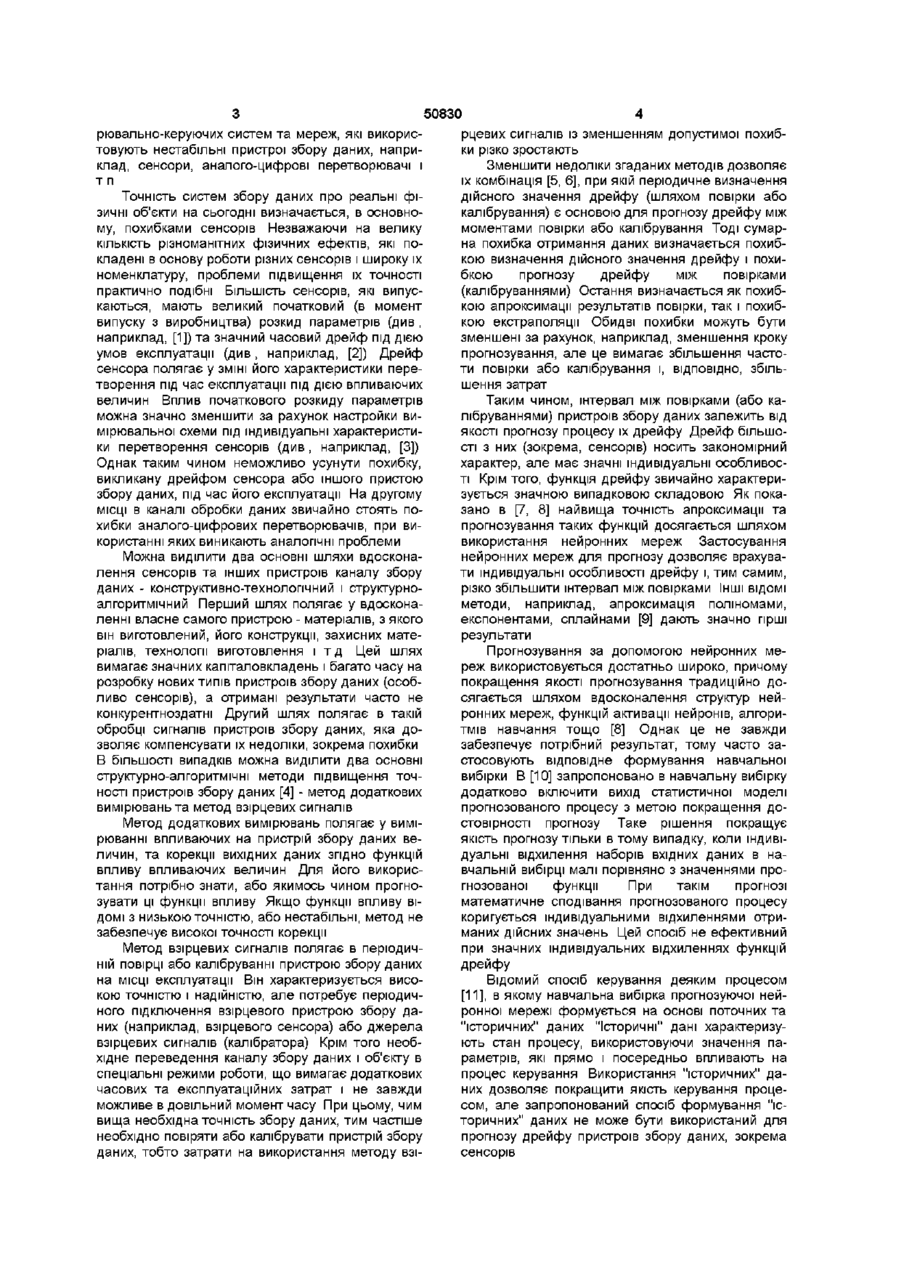
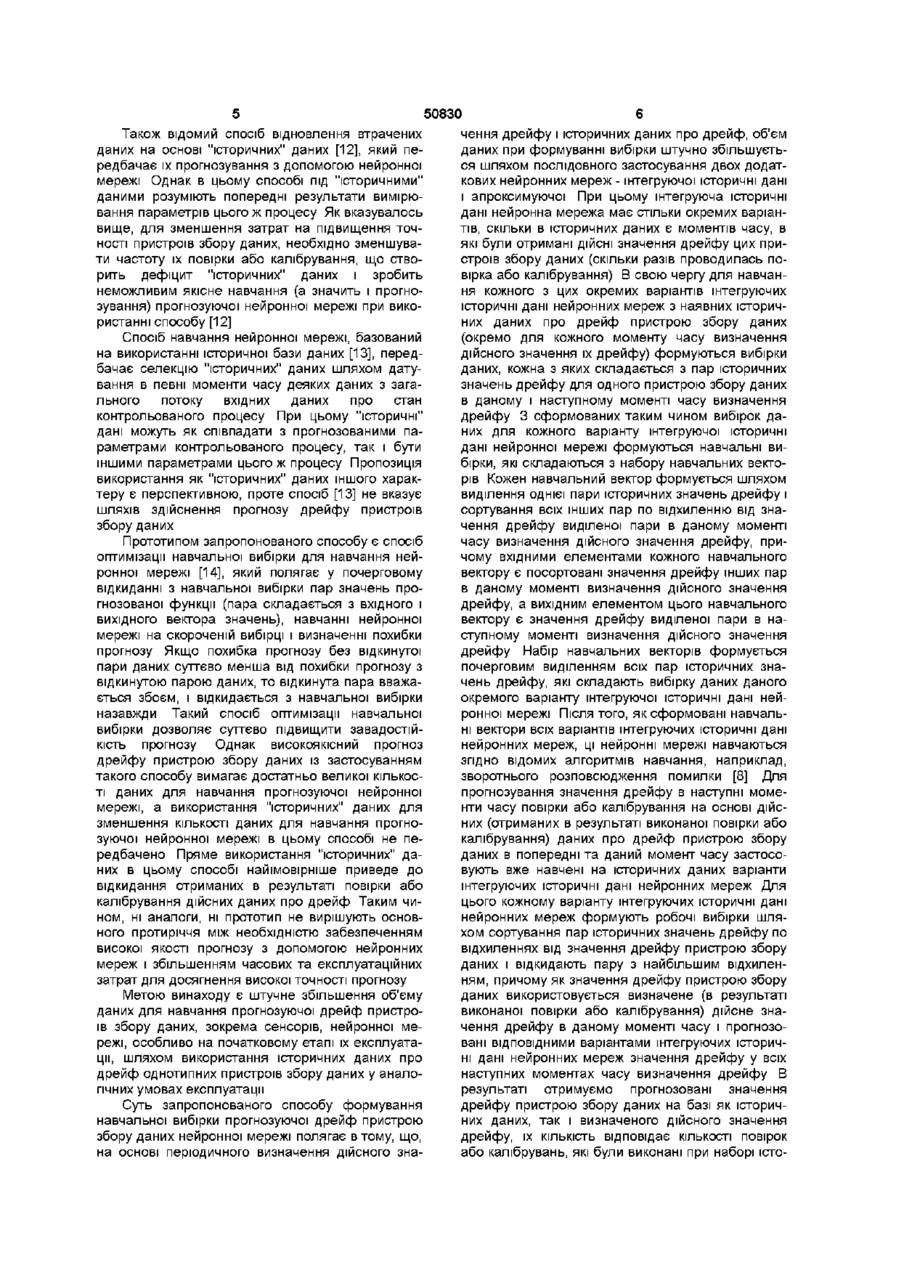
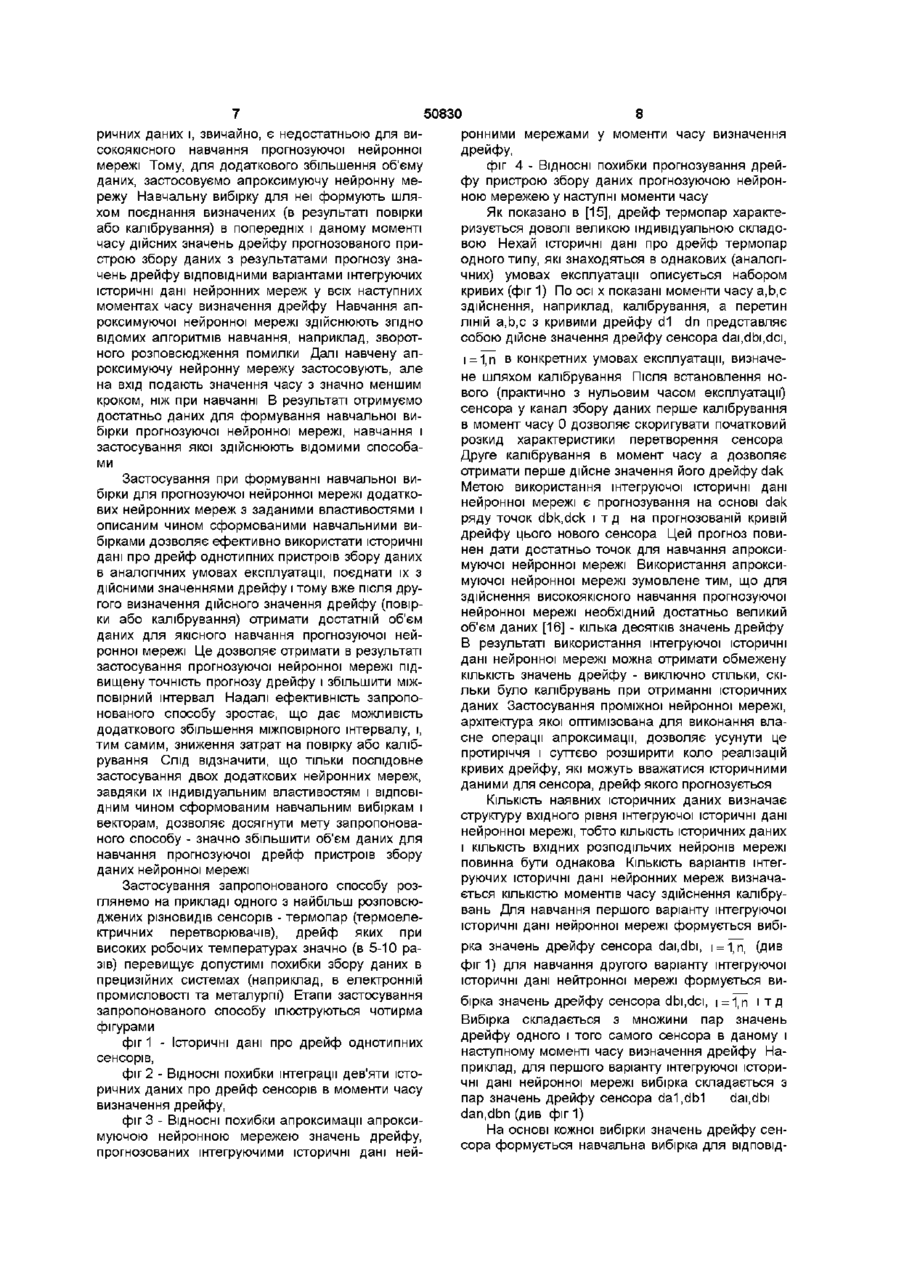
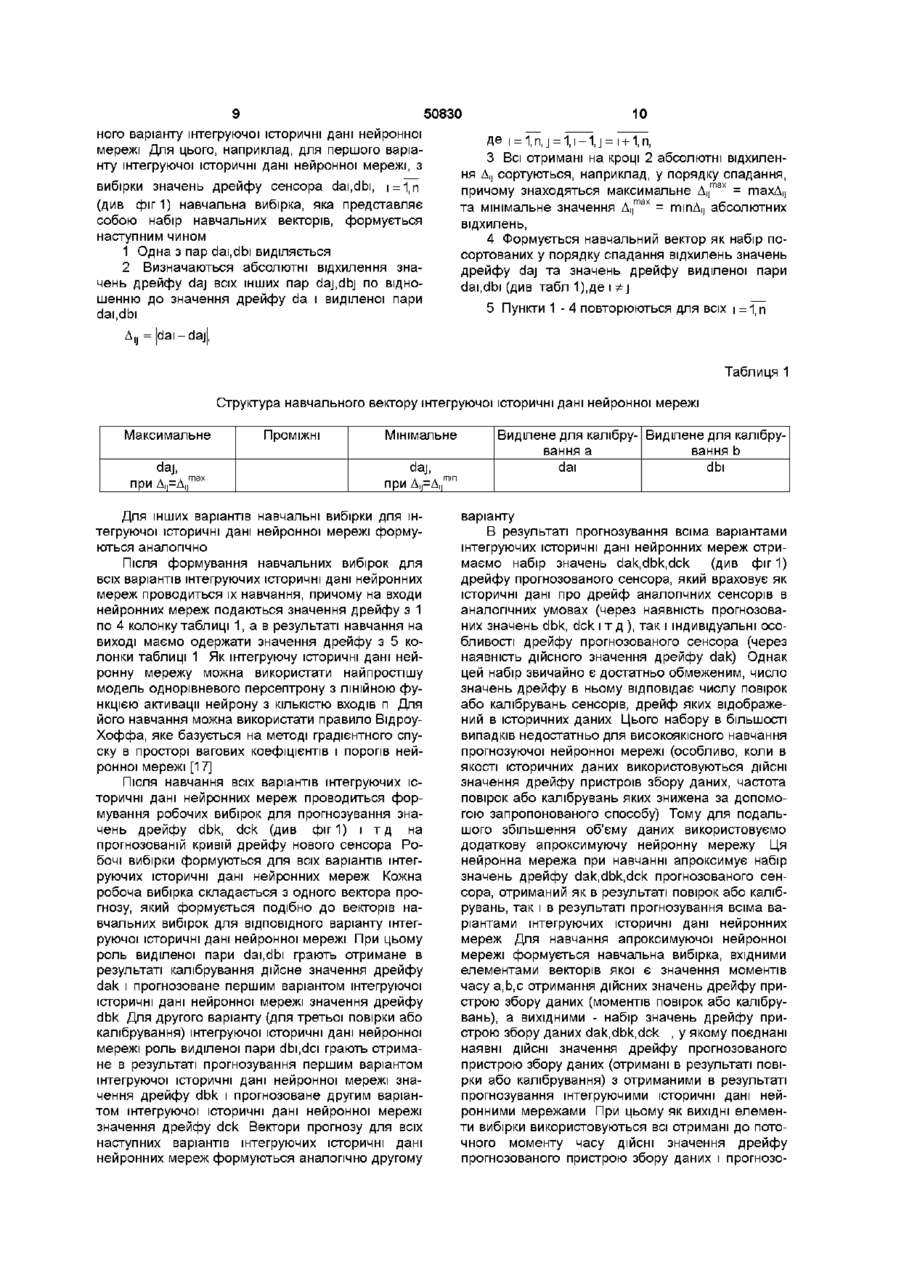
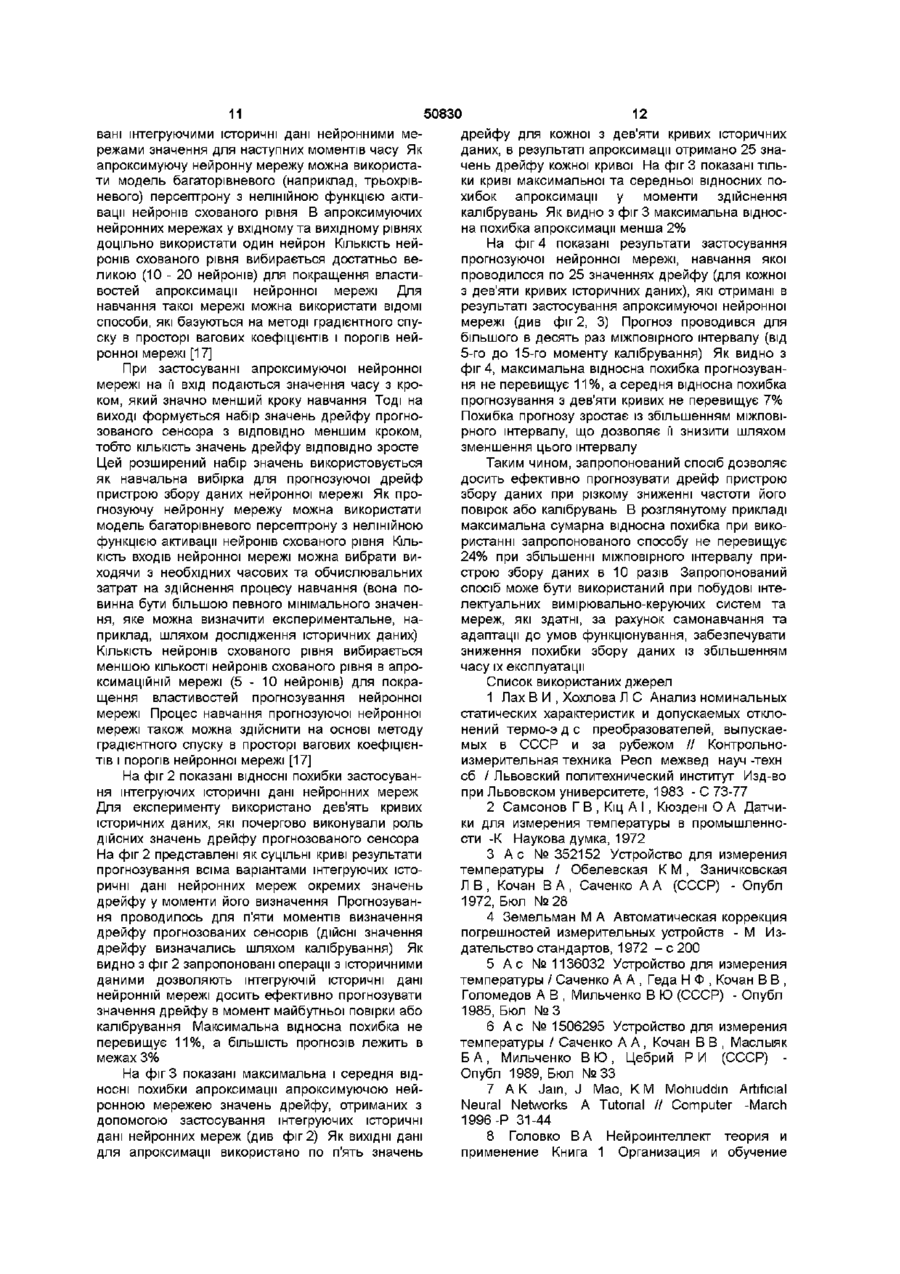
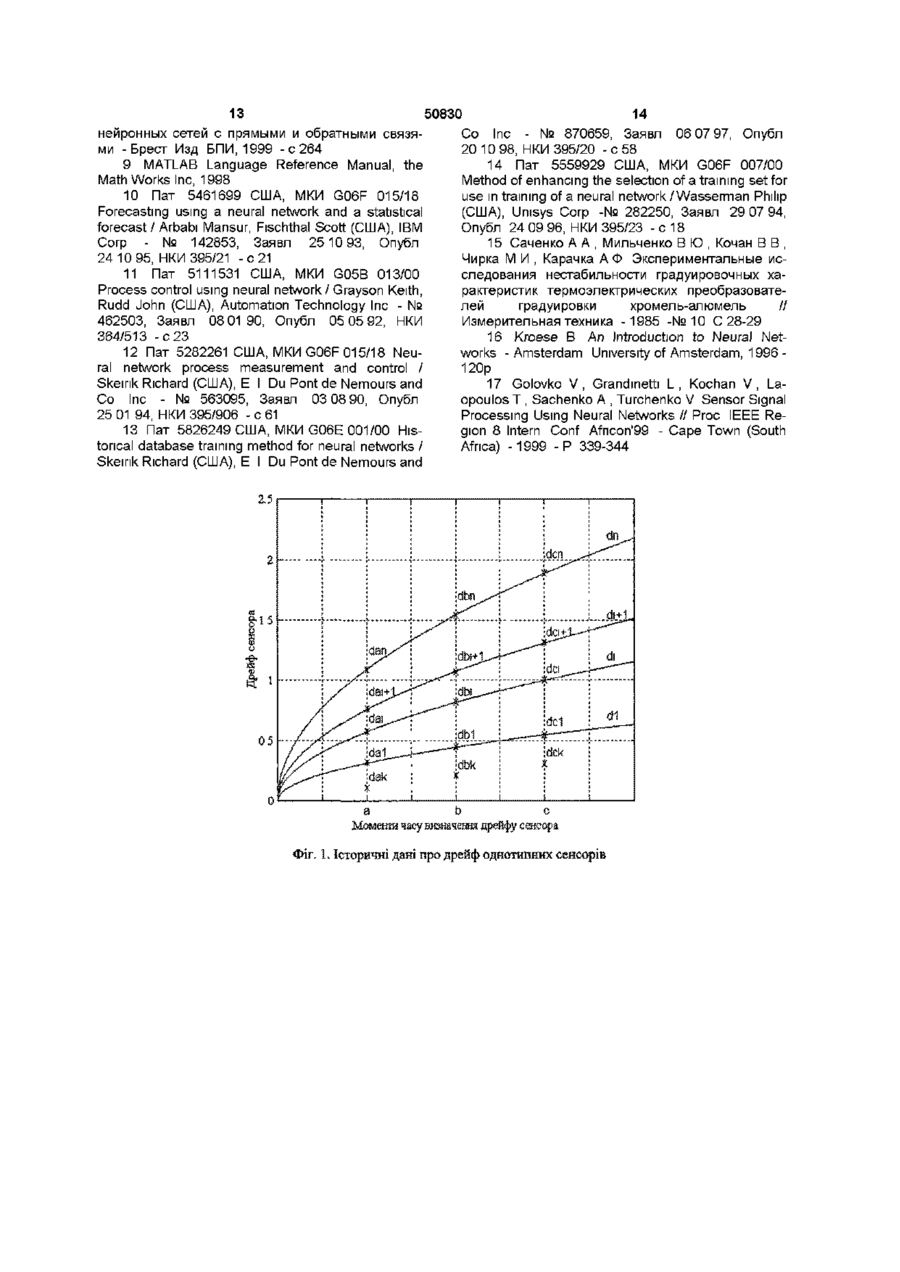
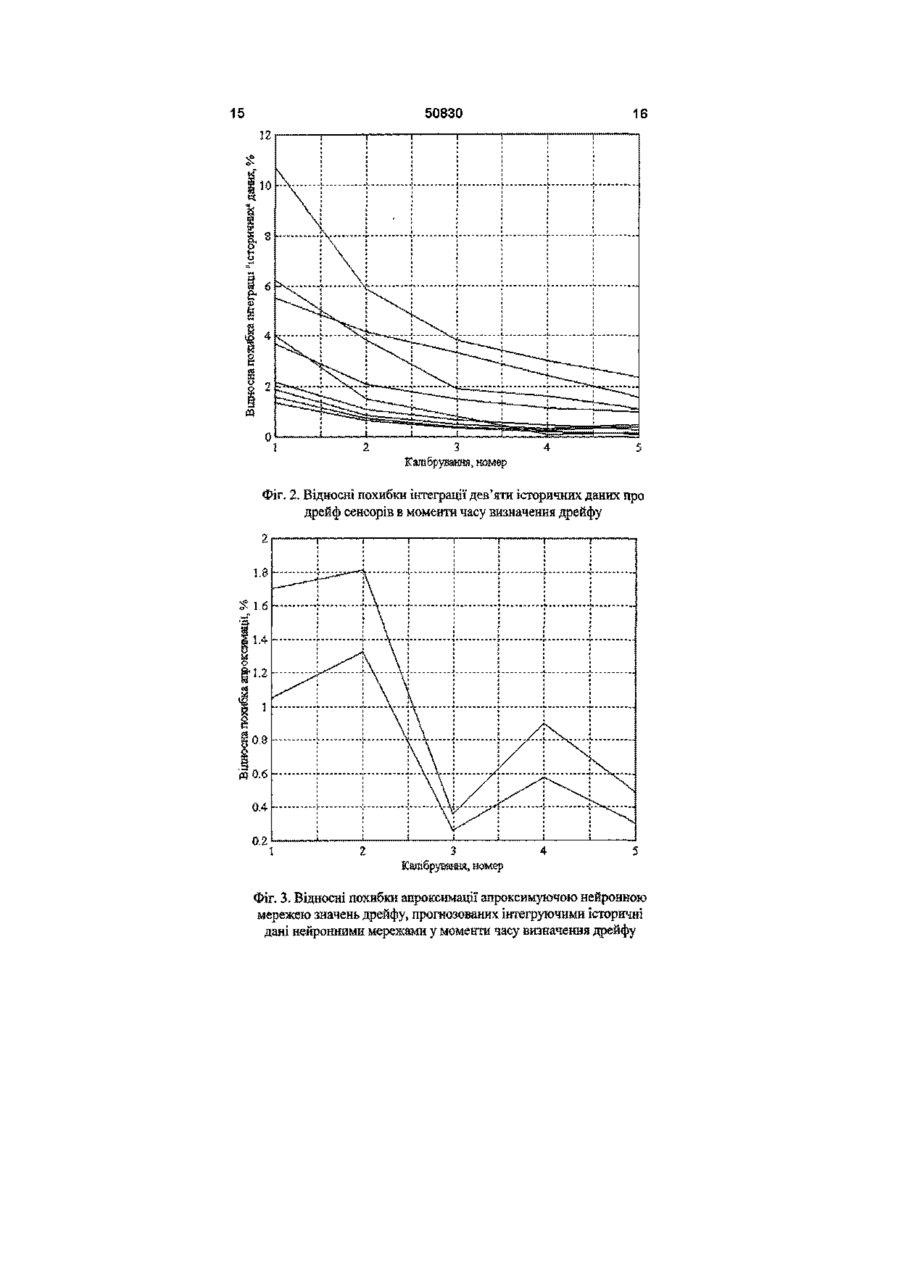
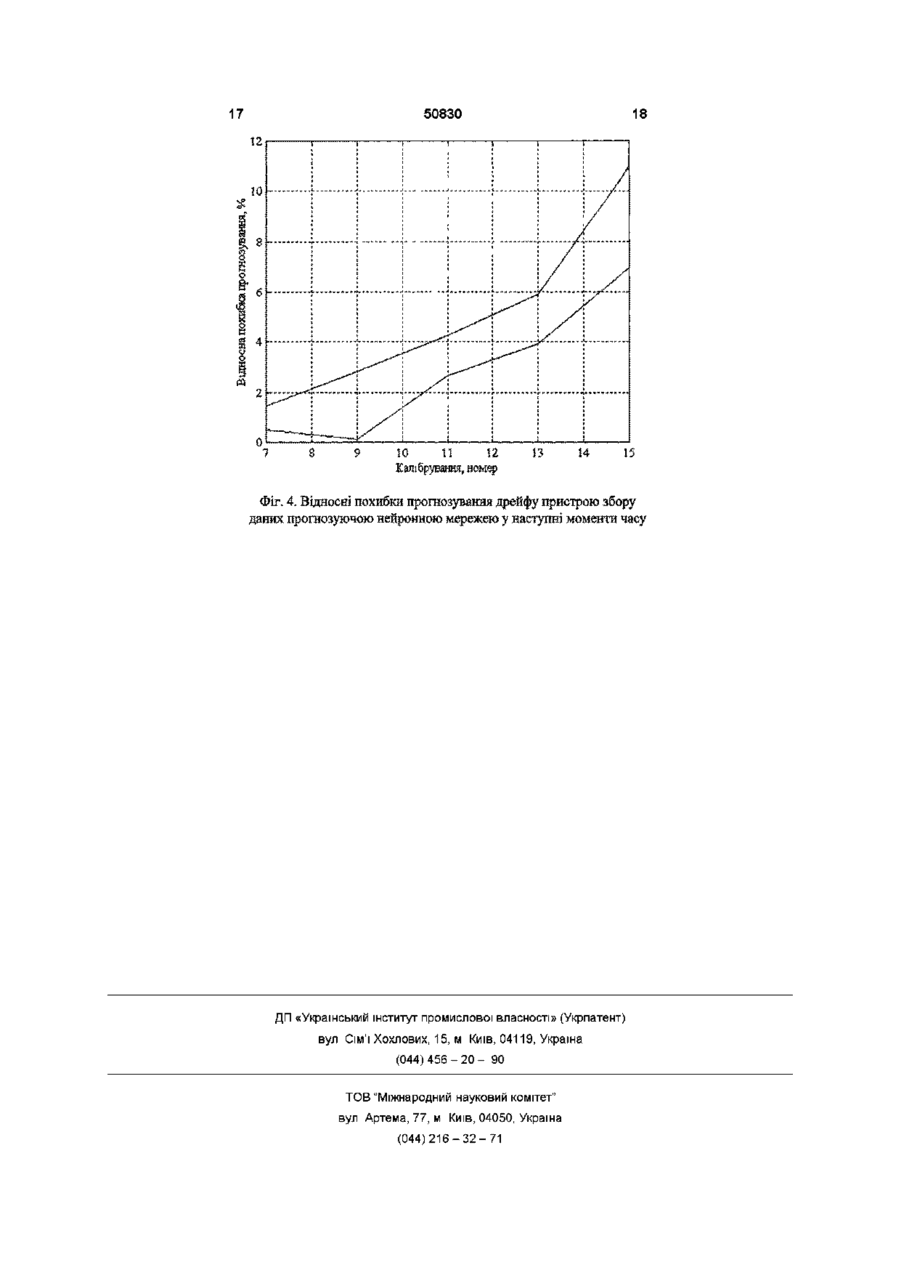
1 Спосіб формування навчальної вибірки прогнозуючої дрейф пристрою збору даних нейронної мережі, на основі періодичного визначення дійсного значення дрейфу і історичних даних про дрейф, який відрізняється тим, що об'єм даних при формуванні вибірки штучно збільшується шляхом формування вибірок даних послідовно для двох додаткових нейронних мереж інтегруючої історичні дані і апроксимуючої 2 Спосіб за п 1 який відрізняється тим, що при формуванні вибірок даних для інтегруючої історичні дані нейронної мережі з наявних історичних даних про дрейф пристрою збору даних окремо для кожного моменту часу визначення дійсного значення їх дрейфу, для окремого варіанту інтегруючої історичні дані нейронної мережі формується вибірка даних, що складається з пар історичних значень дрейфу для одного пристрою збору даних в даному і наступному моменті часу визначення дрейфу 3 Спосіб за п 2, який відрізняється тим, що при формуванні навчальної вибірки для варіанту інтегруючої історичні дані нейронної мережі з сформованої вибірки даних формується набір навчальних векторів шляхом почергового виділення однієї пари історичних значень дрейфу і сортування всіх інших пар по відхиленню від значення дрейфу виділеної пари в даному моменті часу визначення дійсного значення дрейфу, причому вхідними елементами кожного навчального вектора є відсортовані значення дрейфу інших пар в даному моменті визначення дійсного значення дрейфу, а вихідним елементом цього навчального вектора є значення дрейфу виділеної пари в наступному моменті визначення дійсного значення дрейфу 4 Спосіб за п 1, який відрізняється тим, що при формуванні робочої вибірки для інтегруючої історичні дані нейронної мережі для кожного варіанту інтегруючої історичні дані нейронної мережі сортують пари історичних значень дрейфу по відхиленнях від значення дрейфу пристрою збору даних і відкидають пару з найбільшим відхиленням, причому як значення дрейфу пристрою збору даних використовується визначене дійсне значення дрейфу в даному моменті часу і прогнозовані ВІДПОВІДНИМИ варіантами інтегруючих історичні дані нейронних мереж значення дрейфу у всіх наступних моментах часу визначення дрейфу 5 Спосіб за п 1, який відрізняється тим, що при формуванні навчальної вибірки для апроксимуючої нейронної мережі в навчальній вибірці поєднуються визначені в попередніх і даному моменті часу ДІЙСНІ значення дрейфу прогнозованого пристрою збору даних з результатами прогнозу значень дрейфу ВІДПОВІДНИМИ варіантами інтегруючих історичні дані нейронних мереж у всіх наступних моментах часу визначення дрейфу Запропонований спосіб формування навчальної вибірки прогнозуючої дрейф пристрою збору даних нейронної мережі може бути використаний при створенні спеціалізованих прецизійних вимі О о со 00 о ю 50830 рювально-керуючих систем та мереж, які використовують нестабільні пристрої збору даних, наприклад, сенсори, аналого-цифрові перетворювачі і тп Точність систем збору даних про реальні фізичні об'єкти на сьогодні визначається, в основному, похибками сенсорів Незважаючи на велику КІЛЬКІСТЬ різноманітних фізичних ефектів, які покладені в основу роботи різних сенсорів і широку їх номенклатуру, проблеми підвищення їх точності практично подібні БІЛЬШІСТЬ сенсорів, які випускаються, мають великий початковий (в момент випуску з виробництва) розкид параметрів (див , наприклад, [1]) та значний часовий дрейф під дією умов експлуатації (див, наприклад, [2]) Дрейф сенсора полягає у ЗМІНІ ЙОГО характеристики перетворення під час експлуатації під дією впливаючих величин Вплив початкового розкиду параметрів можна значно зменшити за рахунок настройки вимірювальної схеми під індивідуальні характеристики перетворення сенсорів (див , наприклад, [3]) Однак таким чином неможливо усунути похибку, викликану дрейфом сенсора або іншого пристою збору даних, під час його експлуатації На другому МІСЦІ в каналі обробки даних звичайно стоять похибки аналого-цифрових перетворювачів, при використанні яких виникають аналогічні проблеми Можна виділити два основні шляхи вдосконалення сенсорів та інших пристроїв каналу збору даних - конструктивно-технологічний і структурноалгоритмічний Перший шлях полягає у вдосконаленні власне самого пристрою - матеріалів, з якого він виготовлений, його конструкції, захисних матеріалів, технології виготовлення і т д Цей шлях вимагає значних капіталовкладень і багато часу на розробку нових типів пристроїв збору даних (особливо сенсорів), а отримані результати часто не конкурентноздатні Другий шлях полягає в такій обробці сигналів пристроїв збору даних, яка дозволяє компенсувати їх недоліки, зокрема похибки В більшості випадків можна виділити два основні структурно-алгоритмічні методи підвищення точності пристроїв збору даних [4] - метод додаткових вимірювань та метод взірцевих сигналів Метод додаткових вимірювань полягає у вимірюванні впливаючих на пристрій збору даних величин, та корекції вихідних даних згідно функцій впливу впливаючих величин Для його використання потрібно знати, або якимось чином прогнозувати ці функції впливу Якщо функції впливу ВІДОМІ з низькою точністю, або нестабільні, метод не забезпечує високої точності корекції Метод взірцевих сигналів полягає в періодичній повірці або калібруванні пристрою збору даних на МІСЦІ експлуатації Він характеризується високою точністю і надійністю, але потребує періодичного підключення взірцевого пристрою збору даних (наприклад, взірцевого сенсора) або джерела взірцевих сигналів (калібратора) Крім того необхідне переведення каналу збору даних і об'єкту в спеціальні режими роботи, що вимагає додаткових часових та експлуатаційних затрат і не завжди можливе в довільний момент часу При цьому, чим вища необхідна точність збору даних, тим частіше необхідно повіряти або калібрувати пристрій збору даних, тобто затрати на використання методу взі рцевих сигналів із зменшенням допустимої похибки різко зростають Зменшити недоліки згаданих методів дозволяє їх комбінація [5, 6], при якій періодичне визначення дійсного значення дрейфу (шляхом повірки або калібрування) є основою для прогнозу дрейфу між моментами повірки або калібрування Тоді сумарна похибка отримання даних визначається похибкою визначення дійсного значення дрейфу і похибкою прогнозу дрейфу між повірками (калібруваннями) Остання визначається як похибкою апроксимації результатів повірки, так і похибкою екстраполяції Обидві похибки можуть бути зменшені за рахунок, наприклад, зменшення кроку прогнозування, але це вимагає збільшення частоти повірки або калібрування і, ВІДПОВІДНО, збільшення затрат Таким чином, інтервал між повірками (або калібруваннями) пристроїв збору даних залежить від якості прогнозу процесу їх дрейфу Дрейф більшості з них (зокрема, сенсорів) носить закономірний характер, але має значні індивідуальні особливості Крім того, функція дрейфу звичайно характеризується значною випадковою складовою Як показано в [7, 8] найвища точність апроксимації та прогнозування таких функцій досягається шляхом використання нейронних мереж Застосування нейронних мереж для прогнозу дозволяє врахувати індивідуальні особливості дрейфу і, тим самим, різко збільшити інтервал між повірками Інші ВІДОМІ методи, наприклад, апроксимація поліномами, експонентами, сплайнами [9] дають значно гірші результати Прогнозування за допомогою нейронних мереж використовується достатньо широко, причому покращення якості прогнозування традиційно досягається шляхом вдосконалення структур нейронних мереж, функцій активації нейронів, алгоритмів навчання тощо [8] Однак це не завжди забезпечує потрібний результат, тому часто застосовують відповідне формування навчальної вибірки В [10] запропоновано в навчальну вибірку додатково включити вихід статистичної моделі прогнозованого процесу з метою покращення достовірності прогнозу Таке рішення покращує якість прогнозу тільки втому випадку, коли індивідуальні відхилення наборів вхідних даних в навчальній вибірці малі порівняно з значеннями прогнозованої функції При такім прогнозі математичне сподівання прогнозованого процесу коригується індивідуальними відхиленнями отриманих дійсних значень Цей спосіб не ефективний при значних індивідуальних відхиленнях функцій дрейфу Відомий спосіб керування деяким процесом [11], в якому навчальна вибірка прогнозуючої нейронної мережі формується на основі поточних та "історичних" даних "Історичні" дані характеризують стан процесу, використовуючи значення параметрів, які прямо і посередньо впливають на процес керування Використання "історичних" даних дозволяє покращити якість керування процесом, але запропонований спосіб формування "історичних" даних не може бути використаний для прогнозу дрейфу пристроїв збору даних, зокрема сенсорів 50830 Також відомий спосіб відновлення втрачених даних на основі "історичних" даних [12], який передбачає їх прогнозування з допомогою нейронної мережі Однак в цьому способі під "історичними" даними розуміють попередні результати вимірювання параметрів цього ж процесу Як вказувалось вище, для зменшення затрат на підвищення точності пристроїв збору даних, необхідно зменшувати частоту їх повірки або калібрування, що створить дефіцит "історичних" даних і зробить неможливим якісне навчання (а значить і прогнозування) прогнозуючої нейронної мережі при використанні способу [12] Спосіб навчання нейронної мережі, базований на використанні історичної бази даних [13], передбачає селекцію "історичних" даних шляхом датування в певні моменти часу деяких даних з загального потоку вхідних даних про стан контрольованого процесу При цьому "історичні" дані можуть як співпадати з прогнозованими параметрами контрольованого процесу, так і бути іншими параметрами цього ж процесу Пропозиція використання як "історичних" даних іншого характеру є перспективною, проте спосіб [13] не вказує шляхів здійснення прогнозу дрейфу пристроїв збору даних Прототипом запропонованого способу є спосіб оптимізацм навчальної вибірки для навчання нейронної мережі [14], який полягає у почерговому відкиданні з навчальної вибірки пар значень прогнозованої функції (пара складається з вхідного і вихідного вектора значень), навчанні нейронної мережі на скороченій вибірці і визначенні похибки прогнозу Якщо похибка прогнозу без відкинутої пари даних суттєво менша від похибки прогнозу з відкинутою парою даних, то відкинута пара вважається збоєм, і відкидається з навчальної вибірки назавжди Такий спосіб оптимізацм навчальної вибірки дозволяє суттєво підвищити завадостійкість прогнозу Однак високоякісний прогноз дрейфу пристрою збору даних із застосуванням такого способу вимагає достатньо великої КІЛЬКОСТІ даних для навчання прогнозуючої нейронної мережі, а використання "історичних" даних для зменшення КІЛЬКОСТІ даних для навчання прогнозуючої нейронної мережі в цьому способі не передбачено Пряме використання "історичних" даних в цьому способі найімовірніше приведе до відкидання отриманих в результаті повірки або калібрування дійсних даних про дрейф Таким чином, ні аналоги, ні прототип не вирішують основного протиріччя між необхідністю забезпеченням високої якості прогнозу з допомогою нейронних мереж і збільшенням часових та експлуатаційних затрат для досягнення високої точності прогнозу Метою винаходу є штучне збільшення об'єму даних для навчання прогнозуючої дрейф пристроїв збору даних, зокрема сенсорів, нейронної мережі, особливо на початковому етапі їх експлуатації, шляхом використання історичних даних про дрейф однотипних пристроїв збору даних у аналогічних умовах експлуатації Суть запропонованого способу формування навчальної вибірки прогнозуючої дрейф пристрою збору даних нейронної мережі полягає в тому, що, на основі періодичного визначення дійсного зна чення дрейфу і історичних даних про дрейф, об'єм даних при формуванні вибірки штучно збільшується шляхом послідовного застосування двох додаткових нейронних мереж - інтегруючої історичні дані і апроксимуючої При цьому інтегруюча історичні дані нейронна мережа має стільки окремих варіантів, скільки в історичних даних є моментів часу, в які були отримані ДІЙСНІ значення дрейфу цих пристроїв збору даних (скільки разів проводилась повірка або калібрування) В свою чергу для навчання кожного з цих окремих варіантів інтегруючих історичні дані нейронних мереж з наявних історичних даних про дрейф пристрою збору даних (окремо для кожного моменту часу визначення дійсного значення їх дрейфу) формуються вибірки даних, кожна з яких складається з пар історичних значень дрейфу для одного пристрою збору даних в даному і наступному моменті часу визначення дрейфу 3 сформованих таким чином вибірок даних для кожного варіанту інтегруючої історичні дані нейронної мережі формуються навчальні вибірки, які складаються з набору навчальних векторів Кожен навчальний вектор формується шляхом виділення однієї пари історичних значень дрейфу і сортування всіх інших пар по відхиленню від значення дрейфу виділеної пари в даному моменті часу визначення дійсного значення дрейфу, причому вхідними елементами кожного навчального вектору є посортовані значення дрейфу інших пар в даному моменті визначення дійсного значення дрейфу, а вихідним елементом цього навчального вектору є значення дрейфу виділеної пари в наступному моменті визначення дійсного значення дрейфу Набір навчальних векторів формується почерговим виділенням всіх пар історичних значень дрейфу, які складають вибірку даних даного окремого варіанту інтегруючої історичні дані нейронної мережі Після того, як сформовані навчальні вектори всіх варіантів інтегруючих історичні дані нейронних мереж, ці нейронні мережі навчаються згідно відомих алгоритмів навчання, наприклад, зворотнього розповсюдження помилки [8] Для прогнозування значення дрейфу в наступні моменти часу повірки або калібрування на основі дійсних (отриманих в результаті виконаної повірки або калібрування) даних про дрейф пристрою збору даних в попередні та даний момент часу застосовують вже навчені на історичних даних варіанти інтегруючих історичні дані нейронних мереж Для цього кожному варіанту інтегруючих історичні дані нейронних мереж формують робочі вибірки шляхом сортування пар історичних значень дрейфу по відхиленнях від значення дрейфу пристрою збору даних і відкидають пару з найбільшим відхиленням, причому як значення дрейфу пристрою збору даних використовується визначене (в результаті виконаної повірки або калібрування) дійсне значення дрейфу в даному моменті часу і прогнозовані ВІДПОВІДНИМИ варіантами інтегруючих історичні дані нейронних мереж значення дрейфу у всіх наступних моментах часу визначення дрейфу В результаті отримуємо прогнозовані значення дрейфу пристрою збору даних на базі як історичних даних, так і визначеного дійсного значення дрейфу, їх КІЛЬКІСТЬ відповідає КІЛЬКОСТІ повірок або калібрувань, які були виконані при наборі істо 50830 ричних даних і, звичайно, є недостатньою для високоякісного навчання прогнозуючої нейронної мережі Тому, для додаткового збільшення об'єму даних, застосовуємо апроксимуючу нейронну мережу Навчальну вибірку для неї формують шляхом поєднання визначених (в результаті повірки або калібрування) в попередніх і даному моменті часу дійсних значень дрейфу прогнозованого пристрою збору даних з результатами прогнозу значень дрейфу ВІДПОВІДНИМИ варіантами інтегруючих історичні дані нейронних мереж у всіх наступних моментах часу визначення дрейфу Навчання апроксимуючої нейронної мережі здійснюють згідно відомих алгоритмів навчання, наприклад, зворотного розповсюдження помилки Далі навчену апроксимуючу нейронну мережу застосовують, але на вхід подають значення часу з значно меншим кроком, ніж при навчанні В результаті отримуємо достатньо даних для формування навчальної вибірки прогнозуючої нейронної мережі, навчання і застосування якої здійснюють відомими способами Застосування при формуванні навчальної вибірки для прогнозуючої нейронної мережі додаткових нейронних мереж з заданими властивостями і описаним чином сформованими навчальними вибірками дозволяє ефективно використати історичні дані про дрейф однотипних пристроїв збору даних в аналогічних умовах експлуатації, поєднати їх з дійсними значеннями дрейфу і тому вже після другого визначення дійсного значення дрейфу (повірки або калібрування) отримати достатній об'єм даних для якісного навчання прогнозуючої нейронної мережі Це дозволяє отримати в результаті застосування прогнозуючої нейронної мережі підвищену точність прогнозу дрейфу і збільшити міжповірний інтервал Надалі ефективність запропонованого способу зростає, що дає можливість додаткового збільшення міжповірного інтервалу, і, тим самим, зниження затрат на повірку або калібрування Слід відзначити, що тільки послідовне застосування двох додаткових нейронних мереж, завдяки їх індивідуальним властивостям і ВІДПОВІДНИМ чином сформованим навчальним вибіркам і векторам, дозволяє досягнути мету запропонованого способу - значно збільшити об'єм даних для навчання прогнозуючої дрейф пристроїв збору даних нейронної мережі Застосування запропонованого способу розглянемо на прикладі одного з найбільш розповсюджених різновидів сенсорів - термопар (термоелектричних перетворювачів), дрейф яких при високих робочих температурах значно (в 5-10 разів) перевищує допустимі похибки збору даних в прецизійних системах (наприклад, в електронній промисловості та металургії) Етапи застосування запропонованого способу ілюструються чотирма фігурами фіг 1 - Історичні дані про дрейф однотипних сенсорів, фіг 2 - ВІДНОСНІ похибки інтеграції дев'яти історичних даних про дрейф сенсорів в моменти часу визначення дрейфу, фіг 3 - ВІДНОСНІ похибки апроксимації апроксимуючою нейронною мережею значень дрейфу, прогнозованих інтегруючими історичні дані ней 8 ронними мережами у моменти часу визначення дрейфу, фіг 4 - ВІДНОСНІ похибки прогнозування дрейфу пристрою збору даних прогнозуючою нейронною мережею у наступні моменти часу Як показано в [15], дрейф термопар характеризується доволі великою індивідуальною складовою Нехай історичні дані про дрейф термопар одного типу, які знаходяться в однакових (аналогічних) умовах експлуатації описується набором кривих (фіг 1) По осі х показані моменти часу а,Ь,с здійснення, наприклад, калібрування, а перетин ЛІНІЙ а,Ь,с з кривими дрейфу d1 dn представляє собою дійсне значення дрейфу сенсора dai.dbi.dci, і = 1,п в конкретних умовах експлуатації, визначене шляхом калібрування Після встановлення нового (практично з нульовим часом експлуатації) сенсора у канал збору даних перше калібрування в момент часу 0 дозволяє скоригувати початковий розкид характеристики перетворення сенсора Друге калібрування в момент часу а дозволяє отримати перше дійсне значення його дрейфу dak Метою використання інтегруючої історичні дані нейронної мережі є прогнозування на основі dak ряду точок dbk.dck і т д на прогнозованій кривій дрейфу цього нового сенсора Цей прогноз повинен дати достатньо точок для навчання апроксимуючої нейронної мережі Використання апроксимуючої нейронної мережі зумовлене тим, що для здійснення високоякісного навчання прогнозуючої нейронної мережі необхідний достатньо великий об'єм даних [16] - кілька десятків значень дрейфу В результаті використання інтегруючої історичні дані нейронної мережі можна отримати обмежену КІЛЬКІСТЬ значень дрейфу - виключно стільки, скільки було калібрувань при отриманні історичних даних Застосування проміжної нейронної мережі, архітектура якої оптимізована для виконання власне операції апроксимації, дозволяє усунути це протиріччя і суттєво розширити коло реалізацій кривих дрейфу, які можуть вважатися історичними даними для сенсора, дрейф якого прогнозується КІЛЬКІСТЬ наявних історичних даних визначає структуру вхідного рівня інтегруючої історичні дані нейронної мережі, тобто КІЛЬКІСТЬ історичних даних і КІЛЬКІСТЬ вхідних розподільчих нейронів мережі повинна бути однакова КІЛЬКІСТЬ варіантів інтегруючих історичні дані нейронних мереж визначається КІЛЬКІСТЮ моментів часу здійснення калібрувань Для навчання першого варіанту інтегруючої історичні дані нейронної мережі формується вибірка значень дрейфу сенсора dai.dbi, i = 1, n, (див фіг1) для навчання другого варіанту інтегруючої історичні дані нейтронної мережі формується вибірка значень дрейфу сенсора dbi.dci, | = 1,П ІТД Вибірка складається з множини пар значень дрейфу одного і того самого сенсора в даному і наступному моменті часу визначення дрейфу Наприклад, для першого варіанту інтегруючої історичні дані нейронної мережі вибірка складається з пар значень дрейфу сенсора da1,db1 dai.dbi dan.dbn (див фіг 1) На основі кожної вибірки значень дрейфу сенсора формується навчальна вибірка для ВІДПОВІД 10 50830 ного варіанту інтегруючої історичні дані неиронної мережі Для цього, наприклад, для першого варіанту інтегруючої історичні дані неиронної мережі, з вибірки значень дрейфу сенсора dai.dbi, i = i,n (див фіг1) навчальна вибірка, яка представляє собою набір навчальних векторів, формується наступним чином 1 Одна з пар dai.dbi виділяється 2 Визначаються абсолютні відхилення значень дрейфу daj всіх інших пар daj.dbj по відношенню до значення дрейфу da і виділеної пари dai.dbi де i = 1,n, j = 1,1-1, j = і + 1, n, 3 Всі отримані на кроці 2 абсолютні відхилення Д., сортуються, наприклад, у порядку спадання, причому знаходяться максимальне Д|,тах = тахД, та мінімальне значення Д , т а х = тіпД, абсолютних відхилень, 4 Формується навчальний вектор як набір посортованих у порядку спадання відхилень значень дрейфу daj та значень дрейфу виділеної пари dai.dbi (див табл 1),де і Ф\ 5 Пункти 1 - 4 повторюються для всіх і = 1, п Л,, = dai-daj, Таблиця 1 Структура навчального вектору інтегруючої історичні дані неиронної мережі Максимальне Проміжні Мінімальне daj, daj, при Д „ = Д „ т а х Виділене для калібру- Виділене для калібрування а вання b п р и A|j=A|jmin Для інших варіантів навчальні вибірки для інтегруючої історичні дані неиронної мережі формуються аналогічно Після формування навчальних вибірок для всіх варіантів інтегруючих історичні дані нейронних мереж проводиться їх навчання, причому на входи нейронних мереж подаються значення дрейфу з 1 по 4 колонку таблиці 1, а в результаті навчання на виході маємо одержати значення дрейфу з 5 колонки таблиці 1 Як інтегруючу історичні дані нейронну мережу можна використати найпростішу модель однорівневого персептрону з ЛІНІЙНОЮ функцією активації нейрону з КІЛЬКІСТЮ ВХОДІВ П Д Л Я його навчання можна використати правило ВідроуХоффа, яке базується на методі градієнтного спуску в просторі вагових коефіцієнтів і порогів нейронної мережі [17] Після навчання всіх варіантів інтегруючих історичні дані нейронних мереж проводиться формування робочих вибірок для прогнозування значень дрейфу dbk, dck (див фіг 1) і т д на прогнозованій кривій дрейфу нового сенсора Робочі вибірки формуються для всіх варіантів інтегруючих історичні дані нейронних мереж Кожна робоча вибірка складається з одного вектора прогнозу, який формується подібно до векторів навчальних вибірок для ВІДПОВІДНОГО варіанту інтегруючої історичні дані неиронної мережі При цьому роль виділеної пари dai.dbi грають отримане в результаті калібрування дійсне значення дрейфу dak і прогнозоване першим варіантом інтегруючої історичні дані неиронної мережі значення дрейфу dbk Для другого варіанту (для третьої повірки або калібрування) інтегруючої історичні дані неиронної мережі роль виділеної пари dbi.dci грають отримане в результаті прогнозування першим варіантом інтегруючої історичні дані неиронної мережі значення дрейфу dbk і прогнозоване другим варіантом інтегруючої історичні дані неиронної мережі значення дрейфу dck Вектори прогнозу для всіх наступних варіантів інтегруючих історичні дані нейронних мереж формуються аналогічно другому dai dbi варіанту В результаті прогнозування всіма варіантами інтегруючих історичні дані нейронних мереж отримаємо набір значень dak,dbk,dck (див фіг 1) дрейфу прогнозованого сенсора, який враховує як історичні дані про дрейф аналогічних сенсорів в аналогічних умовах (через наявність прогнозованих значень dbk, dck і т д ), так і індивідуальні особливості дрейфу прогнозованого сенсора (через наявність дійсного значення дрейфу dak) Однак цей набір звичайно є достатньо обмеженим, число значень дрейфу в ньому відповідає числу повірок або калібрувань сенсорів, дрейф яких відображений в історичних даних Цього набору в більшості випадків недостатньо для високоякісного навчання прогнозуючої неиронної мережі (особливо, коли в якості історичних даних використовуються ДІЙСНІ значення дрейфу пристроїв збору даних, частота повірок або калібрувань яких знижена за допомогою запропонованого способу) Тому для подальшого збільшення об'єму даних використовуємо додаткову апроксимуючу нейронну мережу Ця нейронна мережа при навчанні апроксимує набір значень дрейфу dak.dbk.dck прогнозованого сенсора, отриманий як в результаті повірок або калібрувань, так і в результаті прогнозування всіма варіантами інтегруючих історичні дані нейронних мереж Для навчання апроксимуючої неиронної мережі формується навчальна вибірка, вхідними елементами векторів якої є значення моментів часу а,Ь,с отримання дійсних значень дрейфу пристрою збору даних (моментів повірок або калібрувань), а вихідними - набір значень дрейфу пристрою збору даних dak.dbk.dck , у якому поєднані наявні ДІЙСНІ значення дрейфу прогнозованого пристрою збору даних (отримані в результаті повірки або калібрування) з отриманими в результаті прогнозування інтегруючими історичні дані нейронними мережами При цьому як ВИХІДНІ елементи вибірки використовуються всі отримані до поточного моменту часу ДІЙСНІ значення дрейфу прогнозованого пристрою збору даних і прогнозо 12 11 50830 вані інтегруючими історичні дані нейронними медрейфу для кожної з дев'яти кривих історичних режами значення для наступних моментів часу Як даних, в результаті апроксимації отримано 25 знаапроксимуючу нейронну мережу можна використачень дрейфу кожної кривої На фіг 3 показані тільти модель багаторівневого (наприклад, трьохрівки криві максимальної та середньої відносних поневого) персептрону з нелінійною функцією актихибок апроксимації у моменти здійснення вації нейронів схованого рівня В апроксимуючих калібрувань Як видно з фіг 3 максимальна відноснейронних мережах у вхідному та вихідному рівнях на похибка апроксимації менша 2% доцільно використати один нейрон КІЛЬКІСТЬ нейНа фіг 4 показані результати застосування ронів схованого рівня вибирається достатньо вепрогнозуючої нейронної мережі, навчання якої ликою ( 1 0 - 2 0 нейронів) для покращення властипроводилося по 25 значеннях дрейфу (для кожної востей апроксимації нейронної мережі Для з дев'яти кривих історичних даних), які отримані в навчання такої мережі можна використати ВІДОМІ результаті застосування апроксимуючої нейронної способи, які базуються на методі градієнтного спумережі (див фіг 2, 3) Прогноз проводився для ску в просторі вагових коефіцієнтів і порогів нейбільшого в десять раз міжповірного інтервалу (від ронної мережі [17] 5-го до 15-го моменту калібрування) Як видно з фіг 4, максимальна відносна похибка прогнозуванПри застосуванні апроксимуючої нейронної ня не перевищує 11%, а середня відносна похибка мережі на її вхід подаються значення часу з кропрогнозування з дев'яти кривих не перевищує 7% ком, який значно менший кроку навчання Тоді на Похибка прогнозу зростає із збільшенням міжповівиході формується набір значень дрейфу прогнорного інтервалу, що дозволяє її знизити шляхом зованого сенсора з ВІДПОВІДНО меншим кроком, зменшення цього інтервалу тобто КІЛЬКІСТЬ значень дрейфу ВІДПОВІДНО зросте Цей розширений набір значень використовується Таким чином, запропонований спосіб дозволяє як навчальна вибірка для прогнозуючої дрейф досить ефективно прогнозувати дрейф пристрою пристрою збору даних нейронної мережі Як прозбору даних при різкому зниженні частоти його гнозуючу нейронну мережу можна використати повірок або калібрувань В розглянутому прикладі модель багаторівневого персептрону з нелінійною максимальна сумарна відносна похибка при викофункцією активації нейронів схованого рівня КІЛЬристанні запропонованого способу не перевищує КІСТЬ ВХОДІВ нейронної мережі можна вибрати ви24% при збільшенні міжповірного інтервалу приходячи з необхідних часових та обчислювальних строю збору даних в 10 разів Запропонований затрат на здійснення процесу навчання (вона поспосіб може бути використаний при побудові інтевинна бути більшою певного мінімального значенлектуальних вимірювально-керуючих систем та ня, яке можна визначити експериментальне, намереж, які здатні, за рахунок самонавчання та приклад, шляхом дослідження історичних даних) адаптації до умов функціонування, забезпечувати КІЛЬКІСТЬ нейронів схованого рівня вибирається зниження похибки збору даних із збільшенням меншою КІЛЬКОСТІ нейронів схованого рівня в апрочасу їх експлуатації ксимаційній мережі ( 5 - 1 0 нейронів) для покраСписок використаних джерел щення властивостей прогнозування нейронної 1 Лах В И , Хохлова Л С Анализ номинальных мережі Процес навчання прогнозуючої нейронної статических характеристик и допускаемых откломережі також можна здійснити на основі методу нений термо-э д с преобразователей, выпускаеградієнтного спуску в просторі вагових коефіцієнмых в СССР и за рубежом // Контрольнотів і порогів нейронної мережі [17] измерительная техника Респ межвед науч -техн сб / Львовский политехнический институт Изд-во На фіг 2 показані ВІДНОСНІ похибки застосуванпри Львовском университете, 1983 - С 73-77 ня інтегруючих історичні дані нейронних мереж Для експерименту використано дев'ять кривих 2 Самсонов Г В , Кіц А І , Кюздені О А Датчиісторичних даних, які почергово виконували роль ки для измерения температуры в промышленнодійсних значень дрейфу прогнозованого сенсора сти -К Наукова думка, 1972 На фіг 2 представлені як суцільні криві результати 3 А с № 352152 Устройство для измерения прогнозування всіма варіантами інтегруючих істотемпературы / Обелевская К М , Заничковская ричні дані нейронних мереж окремих значень Л В , Кочан В А , Саченко А А (СССР) - Опубл дрейфу у моменти його визначення Прогнозуван1972, Бюл №28 ня проводилось для п'яти моментів визначення 4 Земельман М А Автоматическая коррекция дрейфу прогнозованих сенсорів (ДІЙСНІ значення погрешностей измерительных устройств - М Издрейфу визначались шляхом калібрування) Як дательство стандартов, 1972 - с 200 видно з фіг 2 запропоновані операції з історичними 5 А с №1136032 Устройство для измерения даними дозволяють інтегруючій історичні дані температуры / Саченко А А , Геда Н Ф , Кочан В В , нейронній мережі досить ефективно прогнозувати Голомедов А В , Мильченко В Ю (СССР) - Опубл значення дрейфу в момент майбутньої повірки або 1985, Бюл № 3 калібрування Максимальна відносна похибка не 6 А с №1506295 Устройство для измерения перевищує 11%, а більшість прогнозів лежить в температуры / Саченко А А , Кочан В В , Маслыяк межах 3% Б А , Мильченко В Ю , Цебрий Р И (СССР) Опубл 1989, Бюл №33 На фіг 3 показані максимальна і середня ВІДНОСНІ похибки апроксимації апроксимуючою ней7 А К Jam, J Мао, KM Mohiuddin Artificial ронною мережею значень дрейфу, отриманих з Neural Networks A Tutorial // Computer -March допомогою застосування інтегруючих історичні 1996-P 31-44 дані нейронних мереж (див фіг 2) Як ВИХІДНІ дані 8 Головко В А Нейроинтеллект теория и для апроксимації використано по п'ять значень применение Книга 1 Организация и обучение 13 50830 14 Co Inc - № 870659, Заявл 06 07 97, Опубл 20 10 98, НКИ 395/20 - с 58 14 Пат 5559929 США, МКИ G06F 007/00 Method of enhancing the selection of a training set for use in training of a neural network/Wasserman Philip (США), Unisys Corp -№ 282250, Заявл 29 07 94, Опубл 24 09 96, НКИ 395/23 - с 18 15 Саченко А А , Мильченко В Ю , Кочан В В , Чирка М И , Карачка А Ф Экспериментальные исследования нестабильности градуировочных характеристик термоэлектрических преобразователей градуировки хромел ь-алюмель // Измерительная техника -1985 -№10 С 28-29 16 Kroese В An Introduction to Neural Networks -Amsterdam University of Amsterdam, 1996120p 17 Golovko V, Grandmetti L, Kochan V, Laopoulos T , Sachenko A , Turchenko V Sensor Signal Processing Using Neural Networks // Proc IEEE Region 8 Intern Conf Afncon'99 - Cape Town (South Africa) -1999 -P 339-344 нейронных сетей с прямыми и обратными связями -Брест Изд БПИ, 1999 - с 264 9 MATLAB Language Reference Manual, the Math Works Inc, 1998 10 Пат 5461699 США, МКИ G06F 015/18 Forecasting using a neural network and a statistical forecast / Arbabi Mansur, Fischthal Scott (США), IBM Corp - № 142853, Заявл 25 10 93, Опубл 24 10 95, НКИ 395/21 - с 21 11 Пат 5111531 США, МКИ G05B 013/00 Process control using neural network/Grayson Keith, Rudd John (США), Automation Technology Inc - № 462503, Заявл 08 0190, Опубл 05 05 92, НКИ 364/513 -с 23 12 Пат 5282261 США, МКИ G06F 015/18 Neural network process measurement and control / Skeink Richard (США), Е I Du Pont de Nemours and Co Inc - № 563095, Заявл 03 08 90, Опубл 25 01 94, НКИ 395/906 - с 61 13 Пат 5826249 США, МКИ G06E 001/00 Historical database training method for neural networks / Skeink Richard (США), E I Du Pont de Nemours and 2.5 d e n _ ^ dbn^ -^""^ darv-^ f d a + J - - 1 dbn^U di d a _ _ - < % - — • 05 dai^---" r^ dai — ^— ^ — ~ - dak < d d b 1 — d _ — : ™ i — - — ~ ' d e k d b k ; а Ь о Момент часу визначення дрейфу сенсора Фіг. 1. Історичні дані про дрейф однотипних сенсорів — • 50830 15 16 Калібрування, номер Фіг, 2. Відносні похибки інтеграції дев'яти історичних даних про дрейф сенсорів в моменти часу визначення дрейфу г г з Калібрування, номер Фіг. З. Відносні похибки апроксимації апроксимуючою нейронного мережею значень дрейфу, прогнозованих інтегруючими історичні дані нейронними мережами у моменти часу визначення дрейфу 121 1 1 [ 1 1 1 1 10 11 12 Калібрування, номер В 14 15 Фіг. 4. Відносні похибки прогнозування дрейфу пристрою збору даних прогнозуючою нейронною мережею у наступні моменти часу ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for generating a data set for adaptive neuron network designed for predicting characteristics of data acquisition devices
Автори англійськоюSachenko Anatolii Oleksiiovych, Kochan Volodymyr Volodymyrovych
Назва патенту російськоюСпособ формирования выборки данных для обучающейся нейронной сети, предназначенной для прогнозирования смещения характеристик устройств сбора данных
Автори російськоюСаченко Анатолий Алексеевич, Кочан Владимир Владимирович
МПК / Мітки
МПК: G06F 15/18
Мітки: мережі, нейронної, пристрою, спосіб, навчальної, вибірки, даних, прогнозуючої, дрейф, формування, збору
Код посилання
<a href="https://ua.patents.su/9-50830-sposib-formuvannya-navchalno-vibirki-prognozuyucho-drejjf-pristroyu-zboru-danikh-nejjronno-merezhi.html" target="_blank" rel="follow" title="База патентів України">Спосіб формування навчальної вибірки прогнозуючої дрейф пристрою збору даних нейронної мережі</a>
Спосіб побудови і навчання нейронної мережі з латеральним гальмуванням
Номер патенту: 49379
Опубліковано: 16.09.2002
Автори: Дубровін Валерій Іванович, Піза Дмитро Макарович, Басов Юрій Федорович, Субботін Сергій Олександрович
МПК: G06K 9/62
Мітки: нейронної, латеральним, мережі, гальмуванням, побудови, спосіб, навчання
Формула / Реферат:
Спосіб побудови і навчання нейронної мережі з латеральним гальмуванням, який полягає в тому, що нейронну мережу утворюють поєднанням шару нейронів з латеральним гальмуванням, який здійснює кластеризацію вхідного простору ознак, і нейромережевого блоку, що здійснює зіставлення виділеним кластерам номера класу, який відрізняється тим, що навчання шару нейронів з латеральним гальмуванням і нейромережевого блоку розділяють і здійснюють...
Спосіб прискореного навчання багатошарових нейронних мереж
Номер патенту: 50361
Опубліковано: 15.10.2002
Автори: Богуслаєв Вячеслав Олександрович, Дубровін Валерій Іванович, Субботін Сергій Олександрович
МПК: G06G 7/60
Мітки: навчання, нейронних, прискореного, спосіб, багатошарових, мереж
Формула / Реферат:
Спосіб прискореного навчання багатошарових нейронних мереж, який полягає в тому, що навчання нейронної мережі здійснюють шляхом ітераційної корекції вагових коефіцієнтів мережі, який відрізняється тим, що ведуть автоматичне спостереження за процесом навчання нейронної мережі і, якщо за задану кількість циклів навчання цільова функція навчання мережі не зменшиться більше, ніж на задану величину, вагові коефіцієнти мережі змінюють для виводу...
Спосіб роботи пристрою,який використовується для електронної передачі даних телефонної розмови по комунікаційній мережі,спосіб забезпечення роботи першого комунікаційного пристрою та спосіб забезпечення роботи

Номер патенту: 26517
Опубліковано: 11.10.1999
Автори: Ванг Тереза Чен Йєн, Морітц Стівен Гаррі
МПК: H03K 17/00
Мітки: передачі, забезпечення, мережі,спосіб, комунікаційного, розмови, пристрою, пристрою,який, першого, даних, електронної, роботи, телефонної, комунікаційній, використовується, спосіб
Формула / Реферат:
1. Способ работы устройства, используемого для электронной передачи данных телефонного разговора по коммуникационной сети, отличающийся тем, что принимают сетевое управлявшее сообщение от указанной сети, причем указанное сообщение несет значение идентификатора логического канала (ИЛК), предназначенное для использования при передаче данных телефонного разговора во время телефонного разговора, получают данные телефонного разговора для передачи...
Спосіб передачі даних у мережі синхронної цифрової ієрархії (sdh) та мережа sdh
Номер патенту: 48218
Опубліковано: 15.08.2002
Автор: Аббас Чені Абдул Мутталіб
Мітки: спосіб, цифрової, передачі, ієрархії, мережі, sdh, синхронної, даних, мережа
Формула / Реферат:
1. Спосіб передачі даних у мережі синхронної цифрової ієрархії (SDH), що включає етапи передачі до вузла мережі форми сигналу даних ззовні мережі, перетворення сигналу у віртуально конкатеновану інформаційну структуру і передачу сигналу через мережу у формі віртуально конкатенованої інформаційної структури, при цьому перетворення сигналу включає обробку додаткових байтів маршруту сигналу, де підтримується цілісність інформації додаткових...
Спосіб і пристрій для формування даних для різних швидкостей передачі даних в системі зв’язку
Номер патенту: 46751
Опубліковано: 17.06.2002
Автори: Вітлі Чарльз Е. ІІІ, Падовані Роберто, Оденволдер Джозеф П., Зехаві Ефраїм, Тідеманн Едвард Дж. молодший
МПК: H04J 3/16
Мітки: різних, зв'язку, швидкостей, системі, даних, передачі, формування, спосіб, пристрій
Формула / Реферат:
1. Спосіб передачі першого кадру даних з швидкістю з першої зумовленої сукупності швидкостей, що належить до сукупності сукупностей швидкостей передачі даних у системі зв'язку, який відрізняється тим, що передбачає операції приймання зазначеного кадру даних, генерування групи бітів контролю парності та кінцевих бітів відповідно до зазначеної сукупності швидкостей для зазначеного першого кадру даних, кодування розширеного кадру даних,...
Наступний патент: Корпус глісуючого судна
Випадковий патент: Спосіб переробки нафтошламів