Кантувач з підйомними центрами
Номер патенту: 56507
Опубліковано: 10.01.2011
Автори: В'юнник Микола Васильович, Моторін Артур Миколайович, Малюсейко Віктор Миронович

Формула / Реферат
1. Кантувач з підйомними центрами, що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу, при цьому стійки виконані з вертикальними напрямними, каретка виконана з роликами для переміщення уздовж згаданих напрямних, а каретка однієї з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом, який відрізняється тим, що привід механізму підйому кінематично з'єднаний з кареткою за допомогою вантажних гвинтів, верхні кінці яких з'єднані з вихідними валами згаданого приводу, а нижні закріплені на основах стійок, і взаємодіючих з вантажними гвинтами гайок, закріплених на каретці.
2. Кантувач за п. 1, який відрізняється тим, що привід механізму підйому виконаний у вигляді мотор-редуктора і з'єднаних з ним двох конічних редукторів, вали яких з'єднані з верхніми кінцями вантажних гвинтів, при цьому вантажні гвинти і гайки виконані у вигляді гвинтових передач з трапецеїдальною різьбою або кулько-гвинтових передач, а механізм повороту виконаний у вигляді мотор-редуктора, вал якого з'єднаний з валом вантажоносійного елемента, при цьому мотор-редуктор закріплений на каретці з протилежної сторони від центру для кріплення виробу і із зміщенням щодо подовжньої осі вала вантажоносійного елемента.
3. Кантувач за п. 1 або 2, який відрізняється тим, що центри вантажоносійних елементів виконані з можливістю кріплення виробів безпосередньо або за допомогою змінних технологічних елементів або знімної опорної рами, при цьому для кріплення виробів безпосередньо згадані центри виконані з можливістю охоплення і фіксації сполучуваних частин виробу зовні, змінні технологічні елементи виконані з можливістю з'єднання із згаданими центрами і із сполучуваними частинами виробів, а знімна опорна рама виконана з можливістю з'єднання із згаданими центрами, із сполучуваними частинами виробів і містить базуючі і притискні елементи для кріплення виробу.
Текст
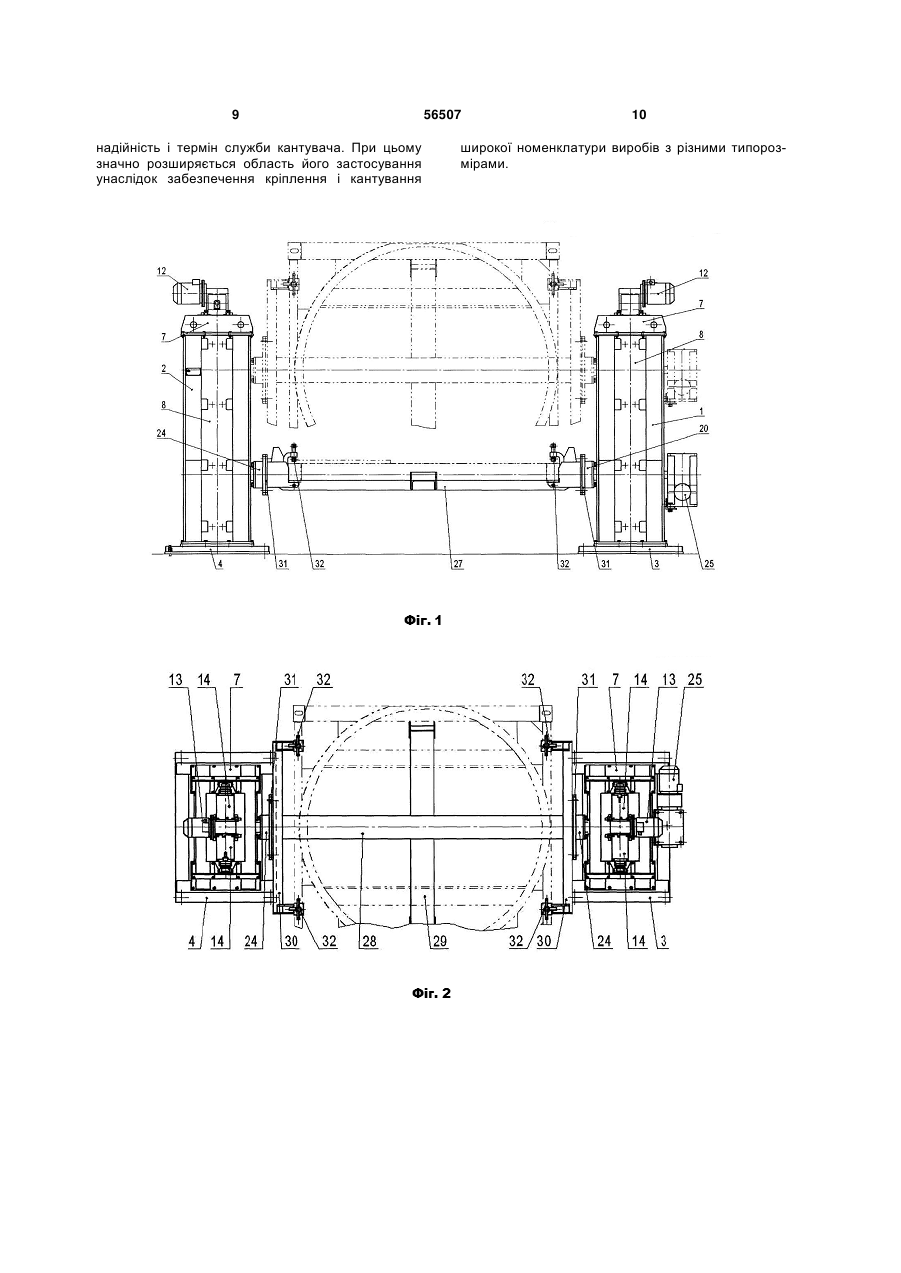
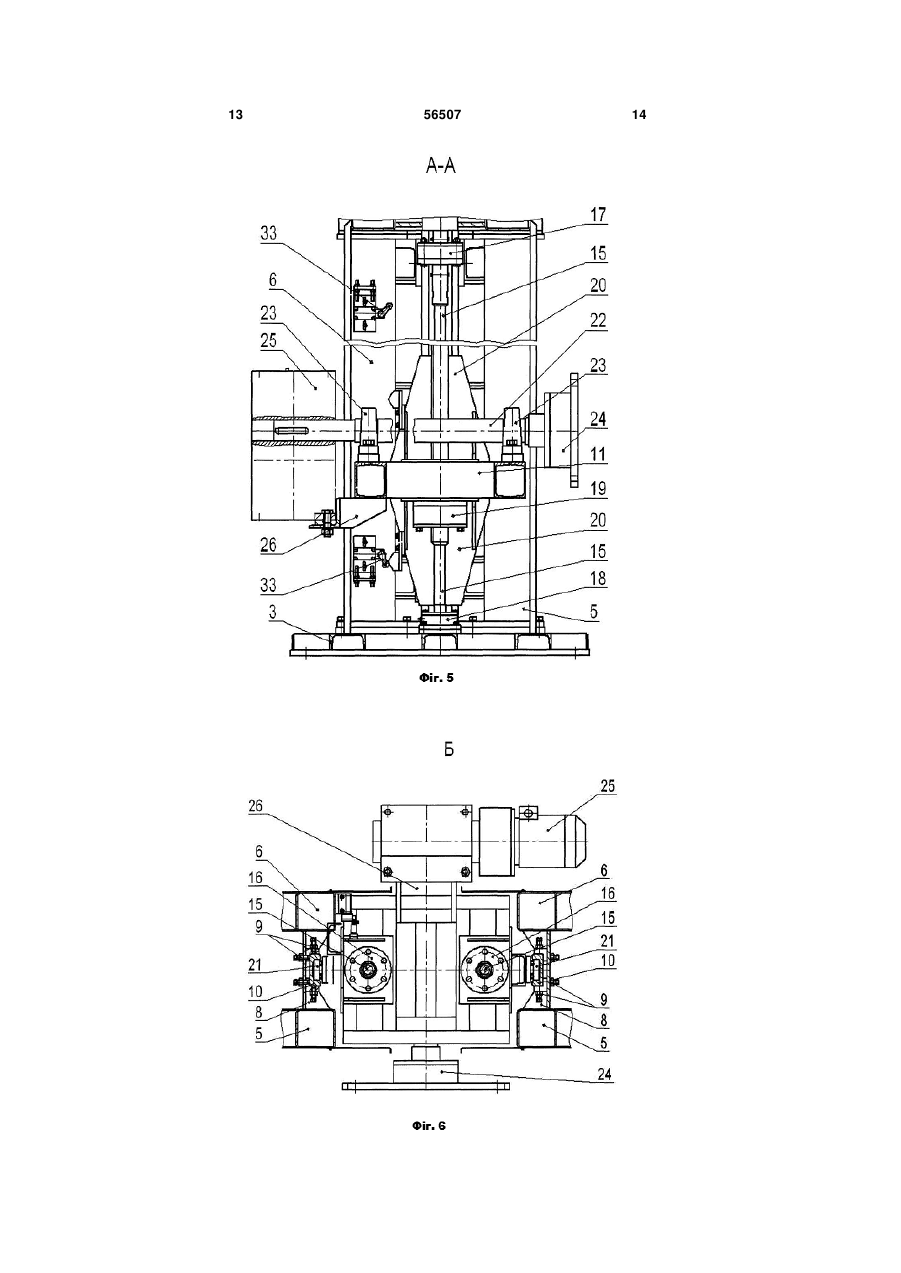
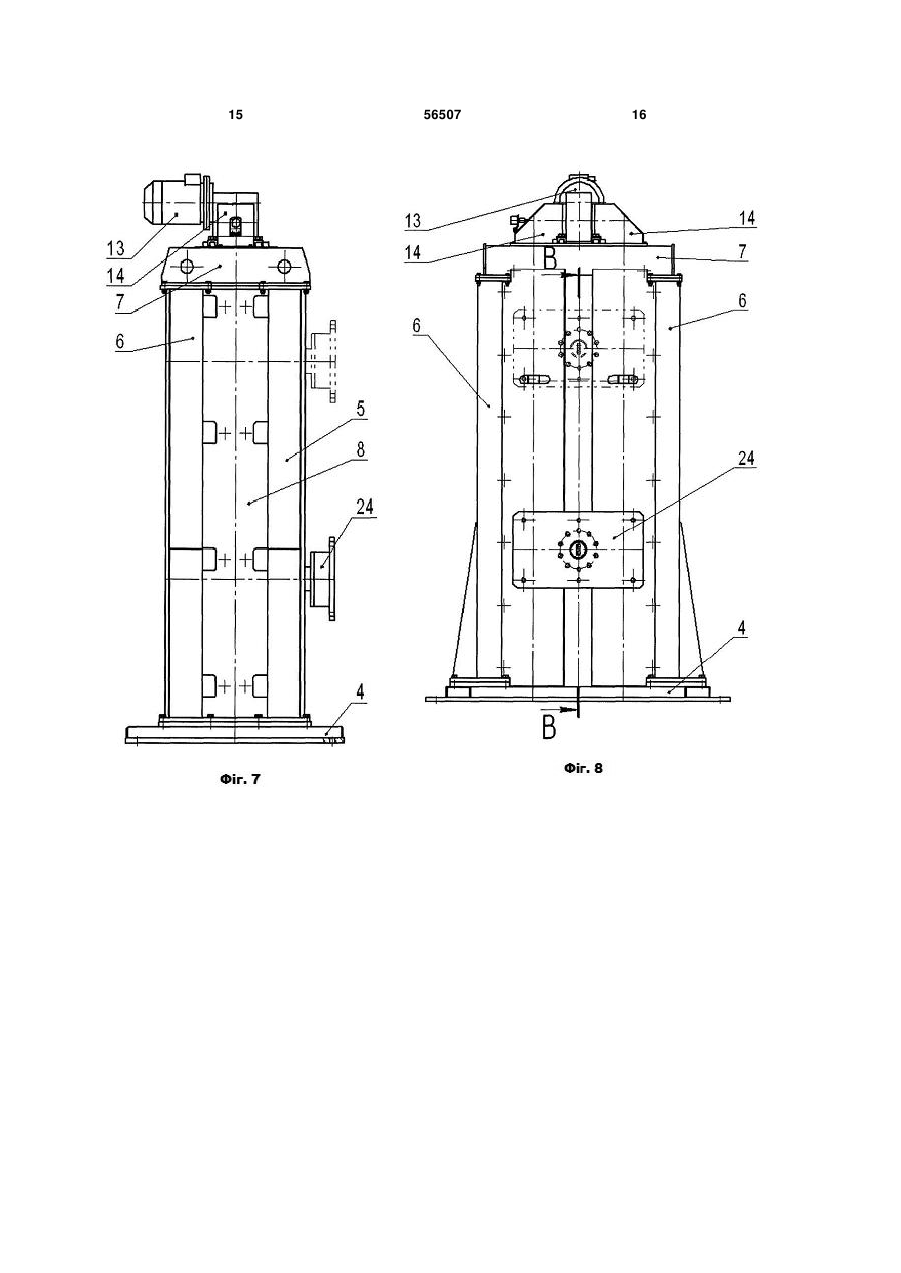
1. Кантувач з підйомними центрами, що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу, при цьому стійки виконані з вертикальними напрямними, каретка виконана з роликами для переміщення уздовж згаданих напрямних, а каретка однієї з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом, який відрізняється тим, що привід механізму підйому кінематично з'єднаний з кареткою за допомогою вантажних гвинтів, верхні кінці яких з'єднані з вихідними валами згаданого приводу, а нижні закріплені на основах стійок, і U 2 56507 1 3 ного елемента з центром для кріплення виробу. Каретка на одній з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом. Стійки виконані з вертикальними напрямними, а каретка виконана з роликами для переміпереміщення уздовж згаданих напрямних. Опори закріплені на заданій відстані одна щодо одної стаціонарно. Механізм підйому виконаний у вигляді двох ланцюгових передач, верхні і нижні вітки яких розташовані на зірочках, з'єднаних, відповідно, з приводом і з натягачем. Вільні кінці ланцюгових передач закріплені на каретці і на страхувальних важелях, виконаних з можливістю гальмування і фіксації положення кареток при обриві або ослабленні ланцюга. Привід механізму підйому складається з двигуна, муфти, гальма, редуктора і відкритої одноступінчатої зубчатої передачі, що містить шестерню і колесо, на загальному валу з яким закріплена зірочка верхньої гілки ланцюгової передачі. Вісь згаданого валу орієнтована перпендикулярно до подовжньої осі вантажоносійного елемента. Механізм повороту виконаний у вигляді приводу і відкритої зубчатої передачі, з'єднаної з валом вантажоносійного елемента. Поворотно-поступальне переміщення вантажоносійного елемента здійснюється за допомогою механізму осьового переміщення, виконаного у вигляді пневмоциліндра, який розташований на каретці. Фіксація положення вантажоносійного елемента в його крайніх положеннях здійснюється за допомогою двоплечих важелів, одне плече яких виконано з можливістю взаємодії з валом вантажоносійного елемента, а друге плече містить копіювальний ролик, виконаний з можливістю взаємодії із закріпленими на стійках упорами. Управління кантувачем здійснюється з кнопкових пультів, закріплених на опорах. Кантувач призначений для захвату, підйому і кантування в положення для зварювання рам залізничних вагонів. Недоліками відомого кантувача є: - використовування ланцюгової передачі в механізмі підйому кареток, що знижує надійність його експлуатації і термін служби; - використовування механічних систем блокування механізмів підйому і осьового переміщення при нештатних ситуаціях, що ускладнює конструкцію, кантує і знижує надійність його експлуатації. Відомий кантувач з підйомними центрами (см. Цыган Б.Г., Цыган А.Б. Вагоностроительные конструкции. Изготовление, модернизация, ремонт /Монография, под ред. Б.Г.Цыгана.- Кременчуг: Изд. "Кременчуг", 2005.- 751 с. - 169-172 с.), що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і виконана у вигляді двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу. Каретка на одній з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом. Стійки виконані з вертикальними напрямними, а каретка виконана з роли 56507 4 ками для переміщення уздовж згаданих напрямних. Опори закріплені на заданій відстані одна щодо одної стаціонарно. Механізм підйому виконаний у вигляді двох ланцюгових передач, верхні і нижні вітки яких розташовані на зірочках, з’єднаних, відповідно, з приводами і з натягачами. Вільні кінці ланцюгових передач закріплені на каретці. Привід механізму підйому складається з черв'ячного мотор-гальмо-редуктора, циліндрового редуктора і відкритої одноступінчатої зубчатої передачі, що складається з шестерні і колеса, на загальному валу з яким закріплені зірочки. Вісь згаданого валу орієнтована уздовж подовжньої осі вантажоносійного елемента. Механізм повороту виконаний у вигляді приводу, що складається з планетарного мотор-редуктора і відкритої двохступінчастої зубчатої передачі, з'єднаної з валом вантажоносійного елемента. Кутові положення вантажоносійного елемента контролюються кінцевими вимикачами. Центр для кріплення виробу виконаний з можливістю розміщення усередині отворів в торцевих частинах виробу. Поворотнопоступальне переміщення вантажоносійного елемента здійснюється за допомогою механізму осьового переміщення, виконаного у вигляді пневмоциліндра, який розташований на каретці. Для запобігання нештатного спрацьовування пневмоциліндра при припиненні подачі стислого повітря він забезпечений кульковим замком. Система управління виконана з можливістю автоматичного управління операціями по прийманню виробів з візка конвеєра і їх підйому на задану висоту. Управління кантувачем здійснюється з пультів управління, розташованих біля кожної стійки. Система управління містить електричні блокування, що виключають одночасне включення двох пультів управління, а також що виключають переміщення кареток із закріпленим на вантажоносійних елементах виробом в поверненому положенні і повороту виробу при недостатній висоті підйому кареток на опорах. Кантувач призначений для захвату, підйому і кантування в положення для зварювання рам залізничних вагонів. Наявність системи управління з електричними блокуваннями дозволяє дещо підвищити надійність експлуатації кантувача. Недоліком відомого кантувача є використовування ланцюгової передачі в механізмі підйому кареток, що знижує надійність його експлуатації і термін служби. В основу корисної моделі поставлена задача створення такого кантувача з підйомними центрами, в якому за рахунок іншого конструктивного виконання механізму підйому кареток забезпечується підвищення надійності його експлуатації і терміну служби. Поставлена задача вирішується тим, що в кантувачі з підйомними центрами, що складається з двох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з 5 кареткою, і змонтованого на каретці вантажоносійного елемента з центром для кріплення виробу, при цьому стійки виконані з вертикальними напрямними, каретка виконана з роликами для переміщення уздовж згаданих напрямних, а каретка однієї з опор містить механізм повороту, привід якого з'єднаний з вантажоносійним елементом, згідно корисної моделі, привід механізму підйому кінематично з'єднаний з кареткою за допомогою вантажних гвинтів, верхні кінці яких з'єднані з вихідними валами згаданого приводу, а нижні закріплені на основах стійок, і взаємодіючих з вантажними гвинтами гайок, закріплених на каретці. Доцільно, щоб привід механізму підйому був виконаний у вигляді мотор-редуктора і з'єднаних з ним двох конічних редукторів, вали яких з'єднані з верхніми кінцями вантажних гвинтів, при цьому вантажні гвинти і гайки були виконані у вигляді гвинтових передач з трапецеїдальним різьбленням або кулько-гвинтових передач, а механізм повороту був виконаний у вигляді моторредуктора, вал якого з'єднаний з валом вантажоносійного елемента, при цьому мотор-редуктор був закріплений на каретці з протилежної сторони від центру для кріплення виробу і із зміщенням щодо подовжньої осі валу вантажоносійного елемента. Доцільно, щоб центри вантажоносійних елементів були виконані з можливістю кріплення виробів безпосередньо або за допомогою змінних технологічних елементів або знімної опорної рами, при цьому для кріплення виробів безпосередньо згадані центри були виконані з можливістю охоплення і фіксації сполучуваних частин виробу зовні, змінні технологічні елементи були виконані з можливістю з'єднання із згаданими центрами і з сполучуваними частинами виробів, а знімна опорна рама була виконана з можливістю з'єднання із згаданими центрами, із сполучуваними частинами виробів і мала базуючі і притискні елементи для кріплення виробу. Використовування вантажних гвинтів і взаємодіючих з ними гайок в кінематичному з'єднанні приводу механізму підйому з кареткою замість ланцюгової схеми їх з'єднання дозволяє підвищити надійність і термін служби кантувача при експлуатації. Виконання підйомних центрів пропонованої конструкції дозволяє значно розширити область застосування кантувача внаслідок забезпечення кріплення і кантування широкої номенклатури виробів з різними типорозмірами. Конструкція кантувача з підйомними центрами, що заявляється, пояснюється на прикладах його виконань, розроблених ΟΟΟ "ΠΦ "Техвагонмаш", м. Кременчук, Україна. Сутність корисної моделі пояснюється представленими фігурами креслень, де на Фіг.1 - загальний вид кантувача, вид спереду; на Фіг.2 - загальний вид кантувача, вид зверху; на Фіг.3 - опора повідна, вид збоку; на Фіг.4 - опора повідна, вид ззаду; на Фіг.5 - переріз А-А на Фіг.4 (установка ходового гвинта механізму підйому і валу вантажоносійного елемента з механізмом повороту); 56507 6 на Фіг.6 - вид Б на Фіг.4 (установка каретки з механізмом повороту на опорах); на Фіг.7 - опора неповідна, вид збоку; на Фіг.8 - опора неповідна, вид спереду; на Фіг.9 - переріз В-В на Фіг.8 (установка ходового гвинта механізму підйому і валу вантажоносійного елемента). Кантувач з підйомними центрами складається (Фіг.1, 2) з двох дзеркально розташованих на заданій відстані одна щодо одної провідної 1 і неповідної 2 опор, кожна з яких закріплена за допомогою болтів (не позначені) на основах, відповідно, 3 і 4. Опори 1 і 2 складаються (Фіг.3-9) з двох стійок 5 і 6 коробчатої конструкції, з'єднаних у верхній частині горизонтальною балкою 7 рамної конструкції, а по довжині - перемичками 8. Уздовж стійок 5 і 6 на перемичках 8 (Фіг.6) за допомогою болтових з'єднань 9 закріплені вертикальні напрямні 10 для переміщення кареток 11. На горизонтальній балці 7 розташований привід 12 механізму підйому, що складається з мотор-редуктора 13 і з'єднаних з ним двох конічних редукторів 14. Приводи 12 на опорах 1 і 2 кінематично з'єднані з відповідними каретками 11 за допомогою вантажних гвинтів 15 і гайок 16. Верхні кінці вантажних гвинтів 15 за допомогою муфт 17 з'єднані з вихідними валами (не позначені) конічних редукторів 14, а нижні кінці закріплені в опорних підшипниках 18 на основах 3 і 4. Вантажні гвинти 15 виконані (Фіг.5, 9) складовими з двох частин, з'єднаних між собою за допомогою муфти 19, розташованої під кареткою 21 у її нижньому положенні. Гайки 16 закріплені на каретках 11. Гвинтова передача між вантажними гвинтами 15 і гайками 16 може бути виконана у вигляді трапецеїдального різьблення або у вигляді кулькогвинтової передачі (не показана). Каретка 11 на повідній опорі 1 виконана (Фіг.5, 6) у вигляді каркаса з жорстко закріпленими на його протилежних торцевих частинах вертикальними кронштейнами 20, на кожному з яких змонтовано по два ролики 21 для переміщення уздовж вертикальних напрямних 10. Вантажоносійний елемент складається з валу 22, закріпленого на каретці 11 за допомогою підшипників 23, і центру 24 для кріплення виробу, виконаного на вільному кінці валу 22. Протилежний кінець валу 22 з'єднаний з вихідним валом (не позначений) механізму повороту, виконаного у вигляді мотор-редуктора 25, закріпленого за допомогою кронштейна 26 на каретці 11 з протилежної сторони від центру 24 і із зміщенням щодо його подовжньої осі. Конструкція каретки 11, розміщеної на неповідній опорі 2, відрізняється від каретки 11 на повідній опорі 2 тим, що вона виконана (Фіг.7) без механізму повороту вантажоносійного елемента. Знімна опорна рама 27 для кріплення виробу виконана у вигляді подовжньої 28 і поперечної 29 балок, жорстко з'єднаних між собою в центральній частині під прямим кутом. На торцевих частинах подовжньої балки 28 закріплені балки 30, виконані з фланцями 31 для кріплення до центрів 24 за допомогою болтових з'єднань (не позначені). На консольних частинах поперечної балки 29 і балок 30 розташовані базуючі елементи (не показані) для 7 установки виробу, а на балках 30 розміщені також струбцини 32 для його кріплення. Залежно від конструктивного виконання і розмірів виробів кантувач може бути виконаний без знімної опорної рами 27. Кріплення виробів при такому виконанні кантувача може здійснюватися або центрами 24, виконаними з можливістю охоплення і фіксації сполучуваних частин виробів зовні, або змінними технологічними елементами (не показані), виконаними з можливістю з'єднання з центрами 24 і із сполучуваними частинами виробів. При цьому змінні технологічні елементи або знімна опорна рама 27 можуть закріплюватися на виробі до подачі його на позицію кантувача. Управління кантувачем здійснюється за допомогою системи управління, побудованої на базі управляючого контролера. Об'єктами управління являються мотор-редуктори 13 механізмів підйому на опорах 1 і 2 і мотор-редуктор 25 механізму повороту на опорі 3. Для управління вказаними об'єктами на стійках 5 і 6 закріплені путьові вимикачі 33 для зупинки кареток 11 при їх підйомі і опусканні на заданій висоті, енкодери (не показані) для синхронізації кутів повороту вантажоносійних елементів на опорах 1 і 2, а також оптичні датчики (не показані) для запобігання переміщення кареток 11 із закріпленим на вантажоносійних елементах виробом в поверненому положенні і кантування виробу при недостатній висоті підйому кареток 11 на опорах 1 і 2. Управління роботою кантувача здійснюється з шафи управління і кнопкового поста управління (не показані). Шафа управління змонтована поблизу кантувача і містить пускову апаратуру із світлосигнальними лампами, кнопкову панель, управляючий контролер і органи захисту і сигналізації (не показані). Пост управління розміщений біля однієї з опор і взаємозв'язані з шафою управління. Пости управління містять кнопкові панелі і світлову сигналізацію (не показані). Система управління підключена до трифазної мережі електроживлення напругою 380В і частотою 50Гц. Система управління забезпечує: - включення електричних силових ланцюгів кантувача; - наладку в режимі ручного управління положень кареток 11 при їх підйомі і опусканні; - режим ручного управління операціями підйому і кантування виробу; - зупинку роботи кантувача, у тому числі, аварійну, в режимі ручного управління. Системою управління передбачені захисні блокування електричних ланцюгів кантувача, у тому числі: - блокування переміщення кареток 11 при їх контакті з відповідними путьовими вимикачами 33; - блокування переміщення кареток 11 із закріпленим на вантажоносійних елементах виробом в поверненому положенні і кантування виробу при недостатній висоті підйому кареток 11 на опорах 1 і 2 після перетинання виробом променя оптичного датчика; - блокування переміщення кареток 11 при несправності будь-якого перетворювача частоти на електроприводах або енкодера; 56507 8 - відключення електроживлення при відкритті дверець шафи управління. Робота кантувача здійснюється в такий спосіб. Приклад виготовлення рами торцевої великовантажного контейнера. В налагоджувальному режимі за допомогою путьових вимикачів 33 задають нижнє і верхнє положення кареток 11 на опорах 1 і 2, при яких забезпечуються зручність установки і кріплення виробу на знімній опорній рамі 27 і подальшого його зняття, а також безперешкодне кантування згаданої рами 27 з виробом на задані кути повороту. Раму подають на позицію кантувача за допомогою підйомно-транспортних засобів, наприклад, мостового крана, укладають на базуючі елементи опорної рами 27 і фіксують за допомогою струбцин 32. Включення силових ланцюгів кантувача здійснюють ввідним автоматичним вимикачем з шафи управління, при цьому автоматично спалахує сигнальна лампа. Подальше управління кантувачем здійснюють з поста управління. Натисненням на кнопку "Вгору" включають мотор-редуктори 13 механізмів підйому на стійках 1 і 2. За допомогою конічних редукторів 14 і вантажних гвинтів 15 з гайками 16 каретки 11 із закріпленим на них виробом переміщають у верхнє положення, при цьому прямолінійний рух кареток 11 задається вертикальними напрямними 10 і роликами 21. Синхронна робота мотор-редукторів 13 забезпечується за допомогою енкодерів, які перетворюють обороти вантажних гвинтів 15 у відповідні імпульси і подають їх на управляючий контролер в шафу управління. Досягши заданої висоти підйому, спрацьовують верхні путьові вимикачі 33 і каретки 11 автоматично зупиняються. Натисненням на кнопку "Вліво" або "Вправо" включають мотор-редуктор 25 на стійці 1 і за допомогою валів 22 повертають центри 24 із закріпленою на них знімною опорною рамою 27 і виробом в ту або іншу сторону на заданий кут. Після виконання зварювальних робіт натисненням на відповідну кнопку знов включають мотор-редуктор 25 і повертають каретки 11 із знімною опорною рамою 27 і виробом в горизонтальне положення, а потім за допомогою мотор-редукторів 13 механізмів підйому на стійках 1 і 2 опускають їх в нижнє положення. При спрацьовуванні нижніх путьових вимикачів 33 каретки 11 автоматично зупиняються. Виріб звільняють від кріплення струбцинами 32 і мостовим краном транспортують з позиції кантувача на наступну технологічну позицію або на майданчик для зберігання. Для кріплення виробів за допомогою центрів 24 або змінних технологічних елементів можна використовувати болтові або клинові або шкворневі з'єднання. При цьому змінні технологічні елементи можуть закріплюватися на виробі до подачі його на позицію кантувача. Решту операцій виконують аналогічно раніше розглянутому прикладу. Конструкція кантувача, що заявляється, випробувана на виробничій базі TOB "НПФ "Техвагонмаш". Результати випробувань підтвердили отримання очікуваних технічних результатів. Зокрема, за рахунок виконання механізму підйому з вантажними гвинтами підвищена експлуатаційна 9 надійність і термін служби кантувача. При цьому значно розширяється область його застосування унаслідок забезпечення кріплення і кантування 56507 10 широкої номенклатури виробів з різними типорозмірами. 11 56507 12 13 56507 14 15 56507 16 17 Комп’ютерна верстка Л.Литвиненко 56507 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTilter with lifting centers
Автори англійськоюMotorin Artur Mykolaiovych, Maliuseiko Viktor Myronovych, Viunnyk Mykola Vasyliovych
Назва патенту російськоюКантователь с подъемными центрами
Автори російськоюМоторин Артур Николаевич, Малюсейко Виктор Миронович, Вьюнник Николай Васильевич
МПК / Мітки
МПК: B23K 37/04
Мітки: центрами, підйомними, кантувач
Код посилання
<a href="https://ua.patents.su/9-56507-kantuvach-z-pidjjomnimi-centrami.html" target="_blank" rel="follow" title="База патентів України">Кантувач з підйомними центрами</a>
Кантувач з підйомними центрами
Номер патенту: 56506
Опубліковано: 10.01.2011
Автори: Моторін Артур Миколайович, Малюсейко Віктор Миронович, В'юнник Микола Васильович
МПК: B23K 37/04
Мітки: підйомними, центрами, кантувач
Формула / Реферат:
1. Кантувач з підйомними центрами, що складається здвох дзеркально розташованих на заданій відстані одна щодо одної опор, кожна з яких закріплена на основі і складається з двох стійок, з'єднаних у верхній частині горизонтальною балкою, каретки, виконаної з можливістю переміщення уздовж стійок, механізму підйому, привід якого закріплений на горизонтальній балці і кінематично з'єднаний з кареткою, і змонтованого на каретці вантажоносійного...
Кантувач великовагових металоконструкцій
Номер патенту: 7259
Опубліковано: 15.06.2005
Автори: Желем Андрій Йосипович, Єрмаков Володимир Петрович
МПК: B23K 37/04
Мітки: великовагових, металоконструкцій, кантувач
Формула / Реферат:
Кантувач великовагових металоконструкцій, що містить дві стійки і поворотну раму, з'єднану зі стійками з можливістю підйому-опускання рами і з можливістю повороту і фіксації її у повернутому положенні, і затискачі виробу, який відрізняється тим, що рама виконана у вигляді замкнутого контура з вільним отвором, обриси якого відповідають обрисам периметра виробу в його стійкому положенні, з можливістю вільного наскрізного переміщення виробу...
Кантувач підвісний
Номер патенту: 54470
Опубліковано: 10.11.2010
Автори: Моторін Артур Миколайович, Малюсейко Віктор Миронович, Роздабара Владислав Іванович
МПК: B66C 1/00, B23K 37/047
Формула / Реферат:
1. Кантувач підвісний містить вертикально орієнтовані вантажоносійні елементи, виконані з можливістю кріплення до вантажопідйомних засобів, поворотні опори, розташовані в нижніх частинах вантажоносійних елементів, і з'єднані з ними захватні елементи, виконані з можливістю взаємодії з протилежними торцевими частинами виробів, при цьому щонайменше один вантажоносійний елемент виконаний з механізмом кантування, що включає привід, кінематично...
Кантувач для складання та зварювання рам залізничних пасажирських вагонів
Номер патенту: 29474
Опубліковано: 10.01.2008
Автори: Дорофій Сергій Миколайович, Браславець Олександр Володимирович, Горовой Олександр Володимирович, Касперов Олексій Петрович, Дрюкова Катерина Юріївна, Яковлев Віталій Васильович, Яцина Наталія Радіївна, Руденко Роман Анатолійович, Нестеренко Олег Миколайович, Захаренко Олена Олексіївна
МПК: B23K 37/047
Мітки: зварювання, рам, кантувач, вагонів, залізничних, складання, пасажирських
Формула / Реферат:
1. Кантувач для складання та зварювання рам залізничних пасажирських вагонів, що складається з двох дзеркально розташованих, синхронно працюючих частин, кожна з яких містить дві стійки, виконані у вигляді телескопічних нерухомих та рухомих частин, траверсу, тримач рами, встановлений на траверсі з можливістю осьового обертання, кожен механізм підйому траверси виконаний у вигляді каретки, встановленої своїми котками в напрямних нерухомого...
Кантувач кувального крана
Номер патенту: 63278
Опубліковано: 15.01.2004
Автори: Дорохов Микола Юрійович, Крупко Валерій Григорович
МПК: B21J 13/00
Мітки: кантувач, кувального, крана
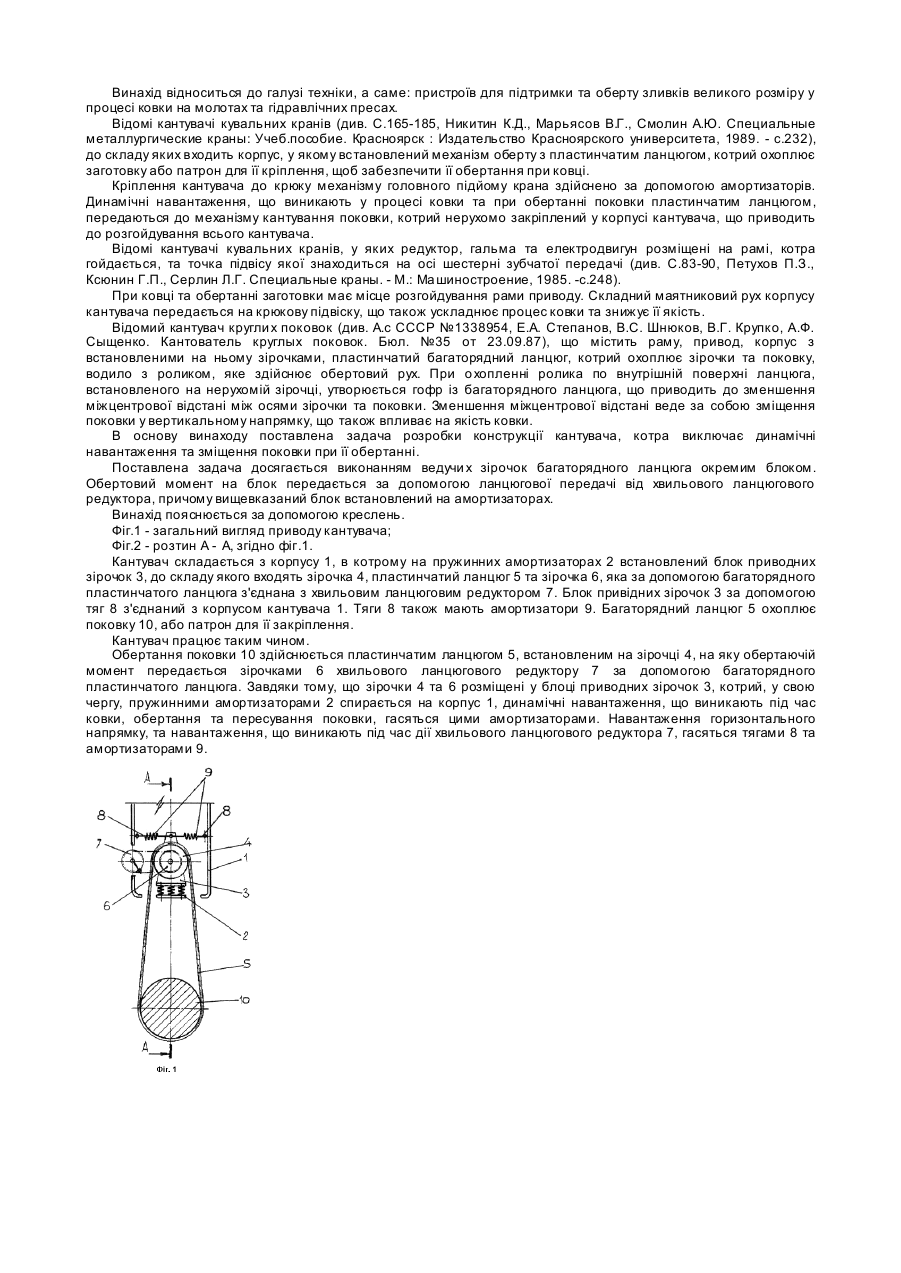
Формула / Реферат:
Кантувач кувального крана, що містить раму, привід, корпус з встановленими на ньому зірочками, пластинчатий багаторядний ланцюг, який охоплює зірочку та поковку, водило з роликом, яке здійснює обертовий рух, який відрізняється тим, що обертання поковки здійснюють пластинчатим ланцюгом, встановленим на зірочці, яка виконана єдиним блоком з веденою зірочкою хвильового ланцюгового редуктора, причому блок, у свою чергу, пружинними амортизаторами...
Попередній патент: Кантувач з підйомними центрами
Наступний патент: Паливо для піролізного котла
Випадковий патент: Судно з механізмами створення гідродинамічної підйомної сили та забезпечення стійкого руху на воді в умовах бортової та хвильової хитавиці