Пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення
Номер патенту: 57465
Опубліковано: 25.02.2011
Автори: Бондар Володимир Семенович, Бадір Карім Кашаш, Стельмах Олександр Устимович, Ібраімов Таріель Толомушевич
Формула / Реферат
1. Пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, що містить станину, ролик, ємність з рідинним середовищем, електропривод, блок керування та реєстрації параметрів тертя, при цьому зазначений блок керування та реєстрації параметрів тертя виконано з можливістю визначення втрати потужності від тертя ролика щодо рідинного середовища, причому ємність з рідинним середовищем встановлено на станині нерухомо, ролик занурено у рідинне середовище на величину не менше 1 % діаметра зазначеного ролика, який відрізняється тим, що він додатково містить систему сканування величини локального тиску та його розподілу у площині ковзання, при цьому до складу зазначеної системи сканування величини локального тиску та його розподілу у площині ковзання входять пристрій сканування, підшипник ковзання, мікрометричний гвинт, важелі, гнучкий шланг, сенсори тиску, двокоординатний столик та вимірювальний пристрій, причому пристрій сканування виконано у вигляді прозорого конструктивного елемента з внутрішнім каналом, зазначений внутрішній канал виконано всередині тіла пристрою сканування так, що він, у вигляді приймального отвору, з одного боку виходить на контактуючу з роликом робочу плоску поверхню, а з другого боку - з'єднаний через гнучкий шланг з сенсорами тиску, електропривод із роликом закріплено/розташовано на двокоординатному столику з можливістю переміщення зазначеного ролика відносно приймального отвору, пристрій сканування закріплено консольно на підшипниках ковзання, сенсори тиску з'єднано з вимірювальниим приладом, приймальний отвір виконано або круглого поперечного перерізу, або прямокутного, або будь-якої геометричної форми в плані, пристрій сканування виконано або плоским, або криволінійним з радіусом в контакті з роликом, рівним чи більшим за радіус ролика, або від'ємним відносно центра ролика.
2. Пристрій за п. 1, який відрізняється тим, що блок керування та реєстрації параметрів тертя виконано з можливістю визначення як втрати потужності від тертя ролика у рідинному середовищі, так і від тертя в присутності робочої поверхні в залежності від відстані між роликом та робочою поверхнею зазначеного пристрою сканування, що регулюється мікрометричним гвинтом, або від рівня їх стиснення шляхом навантаження пристрою сканування важелями.
3. Пристрій за п. 1, який відрізняється тим, що блок керування та реєстрації параметрів тертя виконано з можливістю задання необхідної швидкості обертання електроприводу та визначення вимірюваних параметрів тертя.
4. Пристрій за п. 1, який відрізняється тим, що мікрометричний гвинт встановлено з можливістю регулювання визначеної відстані від приймального отвору до ролика.
5. Пристрій за п. 1, який відрізняється тим, що важіль/важелі встановлено з можливістю забезпечення визначеного осьового навантаження у контакті ролика з контактною поверхнею пристрою сканування в місці приймального отвору.
Текст
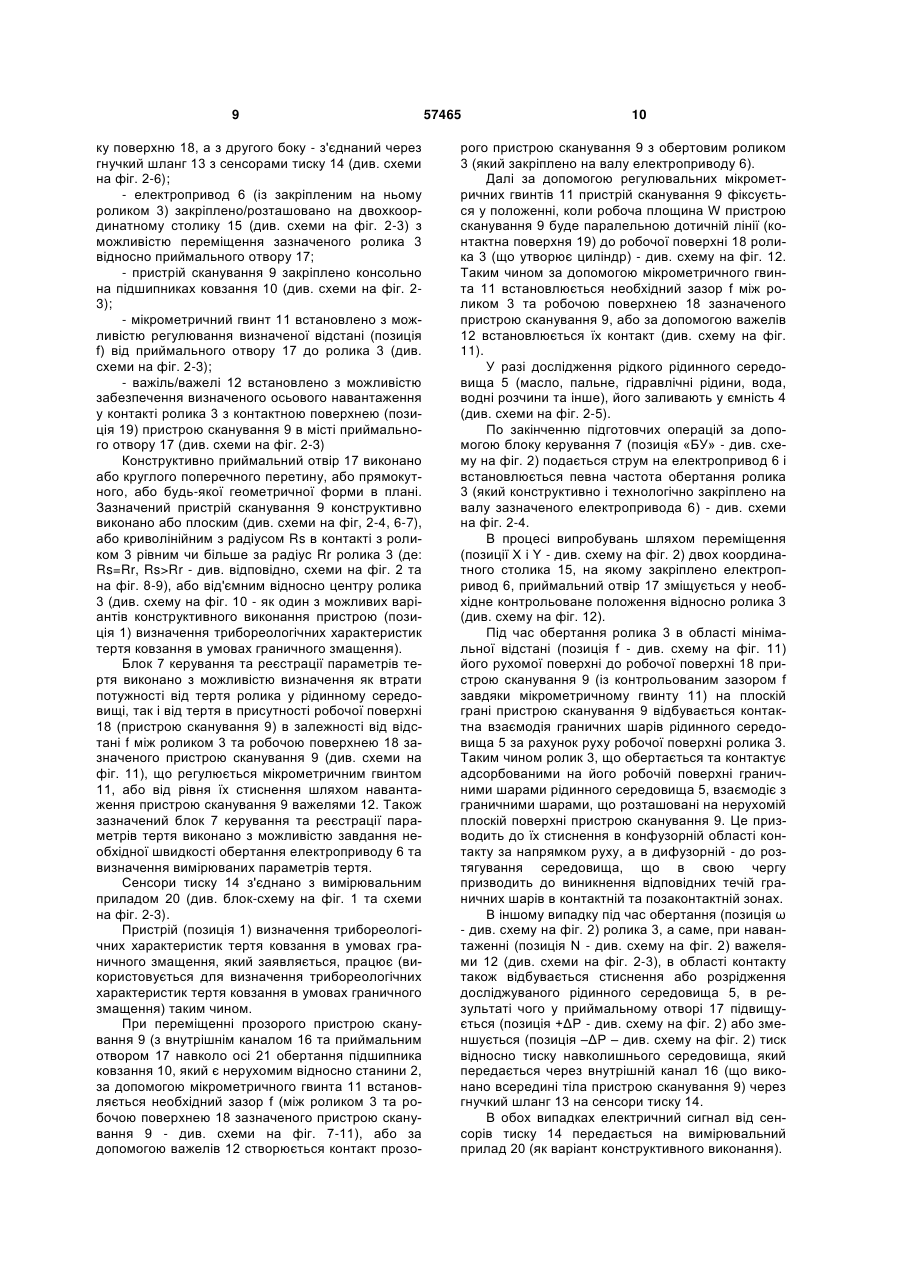
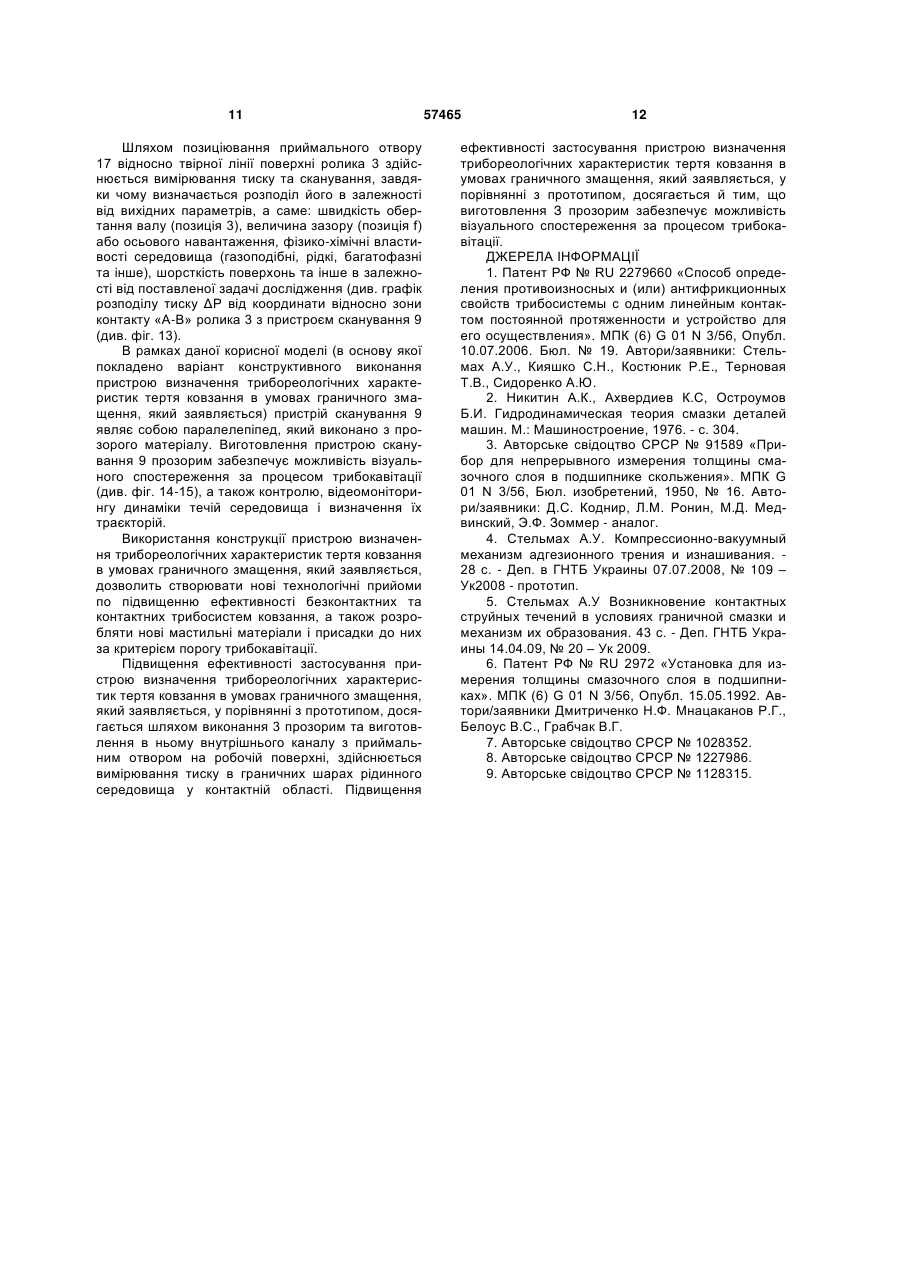
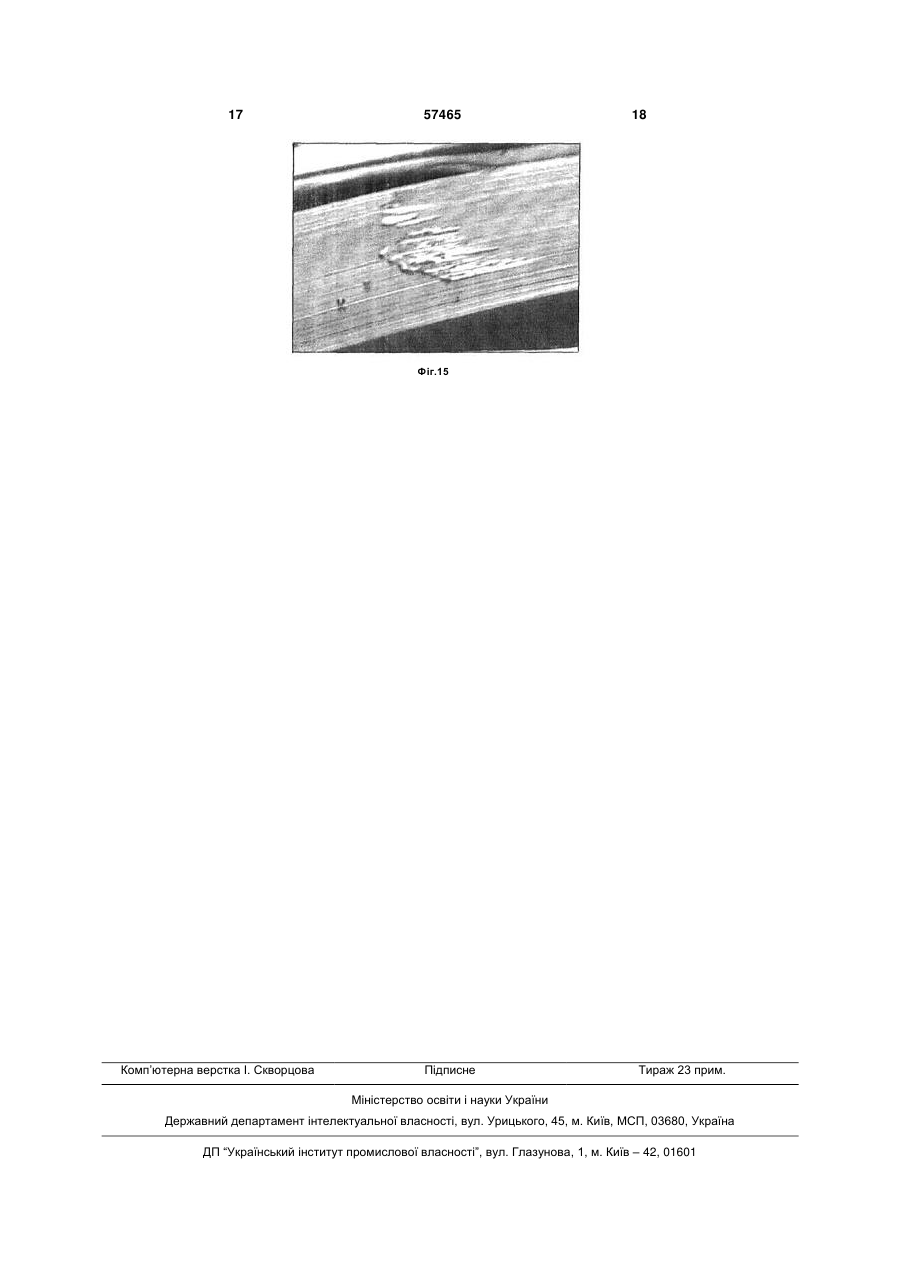
1. Пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, що містить станину, ролик, ємність з рідинним середовищем, електропривод, блок керування та реєстрації параметрів тертя, при цьому зазначений блок керування та реєстрації параметрів тертя виконано з можливістю визначення втрати потужності від тертя ролика щодо рідинного середовища, причому ємність з рідинним середовищем встановлено на станині нерухомо, ролик занурено у рідинне середовище на величину не менше 1 % діаметра зазначеного ролика, який відрізняється тим, що він додатково містить систему сканування величини локального тиску та його розподілу у площині ковзання, при цьому до складу зазначеної системи сканування величини локального тиску та його розподілу у площині ковзання входять пристрій сканування, підшипник ковзання, мікрометричний гвинт, важелі, гнучкий шланг, сенсори тиску, двокоординатний столик та вимірювальний пристрій, причому пристрій сканування виконано у вигляді прозорого конструктивного елемента з внутрішнім каналом, зазначений внутрішній канал виконано всередині тіла пристрою сканування так, що він, у вигляді приймального отвору, з одного боку виходить на контактуючу з роликом робочу плоску поверхню, а з другого боку - з'єднаний через гнучкий шланг з сенсорами тиску, електропривод із роликом закріпле U 2 UA 1 3 механіці трибосистем, трибології, хімотології, газодинаміці, метрології, нафтопереробній, машинобудівній, хімічній та інших галузях промисловості. Пристрої, що створені для оцінки триботехнічних властивостей конструкційних та/або мастильних матеріалів, як правило, дозволяють порівняти їх ефективність лише відносно за протизносними та антифрикційними показниками. Такі порівняльні випробування (за допомогою зазначених пристроїв) дозволяють за відносно короткий термін розробляти та впроваджувати нові ефективні змащувальні матеріали та присадки до них, конструктивні матеріали та технологічні прийоми для підвищення зносостійкості трибосистем. Наприклад, технічне рішення [1] дозволяє визначити ступінь ефективності того чи іншого методу підвищення трибологічних властивостей трибосистем в лабораторних умовах за вимірюваними величинами зносу, температури та сили тертя. Інші пристрої призначені для оцінки триботехнічних характеристик мастильних матеріалів в підшипниках ковзання за допомогою непрямого визначення показників їх якості за відповідними критеріями, серед яких найбільш визнаним є мінімальна товщина граничного шару в контакті. В основу таких методів покладена контактногідродинамічна теорія змащування [2], виходячи з якої основним критерієм оцінки змащувальних властивостей мастил є виконання умови, що товщина змащувального шару повинна перевищувати суму висот мікронерівностей контактуючих поверхонь, що має призвести до реалізації практично беззносного тертя. Відомий пристрій для визначення трибохарактеристик мастильних матеріалів при терті ковзання, що містить силову основу, модель валу, ємність з рідинним середовищем, привід обертання моделі валу, блок керування та реєстрації параметрів тертя, при цьому зазначений блок керування та реєстрації параметрів тертя виконано з можливістю визначення втрати потужності від тертя моделі валу щодо рідинного середовища, причому модель валу виконано у вигляді ролика, ємність з рідинним середовищем встановлено на силовій основі нерухомо, а зазначений ролик занурено у рідинне середовище не величину не менше 1 % діаметра зазначеного ролика [3]. До недоліків зазначеного технічного рішення, яке обрано за найближчий аналог (прототип), відноситься те, що за конструкцією пристрій реалізує тертя ковзання на модельній трибосистемі, деталі якої виготовлюються з металевих, тобто непрозорих конструкційних матеріалів, а це, у свою чергу, не дозволяє встановити момент, коли вони забиваються продуктами зношування або механічними частками, які природно є у середовищі (цьому, відповідно, запобігти неможливо). Найбільш близьким технічним рішенням, як за суттю, так і за задачею, що вирішується, яке обрано за найближчий аналог (прототип), є пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, що містить станину, ролик, ємність з рідинним середовищем, електропривод, блок керування та реєстрації параметрів тертя, при цьому зазначений блок 57465 4 керування та реєстрації параметрів тертя виконано з можливістю визначення втрати потужності від тертя ролика щодо рідинного середовища, причому ємність з рідинним середовищем встановлено на станині нерухомо, ролик занурено у рідинне середовище не величину не менше 1 % діаметра зазначеного ролика [4]. До недоліків зазначеного технічного рішення, яке обрано за найближчий аналог (прототип), відноситься те, що за конструкцією пристрій реалізує тертя ковзання на модельній трибосистемі, деталі якої виготовлюються з металевих, тобто непрозорих конструкційних матеріалів. При цьому площа контакту, як правило, є не визначеною, тому зробити отвори в нерухомій деталі для утворення приймального отвору чи отворів, за допомогою яких можна виміряти тиск в контрольованих областях, вимагає значних зусиль і затрат. Якщо такі отвори виконати у непрозорих матеріалах, поверхні яких знаходяться в області тертя граничних шарів, то встановити момент, коли вони забиваються продуктами зношування або механічними частками, які природно є у середовищі, та відповідно запобігти цьому неможливо. В основу корисної моделі покладена задача шляхом усунення недоліків прототипу та зміни конструкції пристрою забезпечити безпосереднє визначення розподілу локального тиску у граничних шарах рідинного середовища при терті ковзання шляхом сканування тиску. Суть корисної моделі в пристрої визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, що містить станину, ролик, ємність з рідинним середовищем, електропривод, блок керування та реєстрації параметрів тертя, при цьому зазначений блок керування та реєстрації параметрів тертя виконано з можливістю визначення втрати потужності від тертя ролика щодо рідинного середовища, причому ємність з рідинним середовищем встановлено на станині нерухомо, ролик занурено у рідинне середовище не величину не менше 1 % діаметра зазначеного ролика, полягає в тому, що він додатково містить систему сканування величини локального тиску та його розподілу у площині ковзання. Суть корисної моделі полягає і в тому, що до складу зазначеної системи сканування величини локального тиску та його розподілу у площині ковзання входять пристрій сканування, підшипник ковзання, мікрометричний гвинт, важелі, гнучкий шланг, сенсори тиску, двохкоординатний столик та вимірювальний пристрій. Суть корисної моделі полягає і в тому, що пристрій сканування виконано у вигляді прозорого конструктивного елемента з внутрішнім каналом, зазначений внутрішній канал виконано всередині тіла пристрою сканування так, що він, у вигляді приймального отвору, з одного боку виходить на контактуючу з роликом робочу плоску поверхню, а з другого боку - з'єднаний через гнучкий шланг з сенсорами тиску, електропривод із роликом закріплено/розташовано на двохкоординатному столику з можливістю переміщення зазначеного ролика відносно приймального отвору, пристрій сканування закріплено консольно на підшипниках ковзання, сенсори тиску з'єднано з вимірювальни 5 им приладом, приймальний отвір виконано або круглого поперечного перетину, або прямокутного, або будь-якої геометричної форми в плані, пристрій сканування виконано або плоским, або криволінійним з радіусом в контакті з роликом рівним чи більше за радіус ролика, або від'ємним відносно центру ролика. Новим в корисній моделі є те, що блок керування та реєстрації параметрів тертя виконано з можливістю визначення як втрати потужності від тертя ролика у рідинному середовищі, так і від тертя в присутності робочої поверхні в залежності від відстані між роликом та робочою поверхнею зазначеного пристрою сканування, що регулюється мікрометричним гвинтом, або від рівня їх стиснення шляхом навантаження пристрою сканування важелями, зазначений блок керування та реєстрації параметрів тертя виконано з можливістю завдання необхідної швидкості обертання електроприводу та визначення вимірюваних параметрів тертя. Новим в корисній моделі також є й те, що мікрометричний гвинт встановлено з можливістю регулювання визначеної відстані від приймального отвору до ролика, а важіль/важелі встановлено з можливістю забезпечення визначеного осьового навантаження у контакті ролика з контактною поверхнею пристрою сканування в місті приймального отвору. Порівняльний аналіз технічного рішення, яке заявляється, із прототипом, дозволяє зробити висновок, що пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, відрізняється тим, що він додатково містить систему сканування величини локального тиску та його розподілу у площині ковзання, при цьому до складу зазначеної системи сканування величини локального тиску та його розподілу у площині ковзання входять пристрій сканування, підшипник ковзання, мікрометричний гвинт, важелі, гнучкий шланг, сенсори тиску, двохкоординатний столик та вимірювальний пристрій, причому пристрій сканування виконано у вигляді прозорого конструктивного елемента з внутрішнім каналом, зазначений внутрішній канал виконано всередині тіла пристрою сканування так, що він, у вигляді приймального отвору, з одного боку виходить на контактуючу з роликом робочу плоску поверхню, а з другого боку - з'єднаний через гнучкий шланг з сенсорами тиску, електропривод із роликом закріплено/розташовано на двохкоординатному столику з можливістю переміщення зазначеного ролика відносно приймального отвору, пристрій сканування закріплено консольно на підшипниках ковзання, сенсори тиску з'єднано з вимірювальниим приладом, приймальний отвір виконано або круглого поперечного перетину, або прямокутного, або будь-якої геометричної форми в плані, пристрій сканування виконано або плоским, або криволінійним з радіусом в контакті з роликом рівним чи більше за радіус ролика, або від'ємним відносно центру ролика, блок керування та реєстрації параметрів тертя виконано з можливістю визначення як втрати потужності від тертя ролика у рідинному середовищі, так і від тертя в присутності робочої поверхні в залежності від відстані між роликом та робочою 57465 6 поверхнею зазначеного пристрою сканування, що регулюється мікрометричним гвинтом, або від рівня їх стиснення шляхом навантаження пристрою сканування важелями, зазначений блок керування та реєстрації параметрів тертя виконано з можливістю завдання необхідної швидкості обертання електроприводу та визначення вимірюваних параметрів тертя, мікрометричний гвинт встановлено з можливістю регулювання визначеної відстані від приймального отвору до ролика, а важіль/важелі встановлено з можливістю забезпечення визначеного осьового навантаження у контакті ролика з контактною поверхнею пристрою сканування в місті приймального отвору. Досягнення поставленої цілі згідно із суттю корисної моделі вирішується тим, що пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення при обертанні вала з встановленою частотою, що містить механізм приводу, на валу якого розміщено ролик, обертання якого супроводжується деформацією граничних шарів середовища, яке знаходиться між поверхнями ролика та нерухомої деталі, що знаходяться в контакті з регульованим навантаженням під дією важелів або з нормованим зазором за рахунок регулювання мікрометричним гвинтом, а в нерухомій деталі є приймальний отвір для контролю змін (підвищення або зменшення) тиску мастила відносно навколишнього середовища, що призводить до відповідної зміни тиску у внутрішніх каналах нерухомої деталі та передається на сенсори, а шляхом переміщення електроприводу з роликом, закріпленим на двохкоординатному столику, здійснюється сканування зони розподілу тиску, що виникає в граничних шарах при русі ролика, що дозволяє визначати його розподіл по площині, динаміку течій граничних шарів, та опір руху вала, а також умови виникнення трибокавітації. Таким чином, пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, відповідає критерію корисної моделі «новизна». Суть корисної моделі пояснюється за допомогою ілюстрацій, де на фіг. 1 показано блок-схему пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, на фіг. 2 показано конструктивно-компонувальну схему пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, на фіг. 3 показано зовнішній вигляд варіанта конструктивного виконання пристрою визначення розподілу тиску в граничних шарах середовища при терті ковзання, який заявляється, з оптично прозорою трибосистемою ковзання, на фіг. 4 показано візуально спостережувану зону лінійного контакту, змоченого гасом, через бокову грань пристрою сканування, що входить до складу пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, на фіг. 5 показано схему занурення ролика у рідинне середовище, що знаходиться в ємності, на фіг. 6 показано схему варіанта конструктивного виконання пристрою сканування із внутрішнім каналом, на фіг. 7-10 показано 7 схеми варіантів конструктивного виконання пристрою сканування (на виді збоку) з відображенням контакту ролика, на фіг. 11 показано схему зазору f між роликом та робочою поверхнею зазначеного пристрою сканування (при виконанні останнього з плоскою робочою поверхнею), на фіг. 12 показано схему розміщення ролика відносно робочої поверхні пристрою сканування, на фіг. 13 показано графік розподілу тиску ΔР від координати відносно зони контакту «А-В» ролика з пристроєм сканування, на фіг. 14-15 показано лінії току рідини в контактній зоні при терті ковзання ролика по плоскій грані паралелепіпеда та утворення кавітаційних порожнин - трибокавітація. В основу створення конструкції пристрою (позиція 1) визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, покладена гіпотеза динамічного компресійно-вакуумного механізму процесу тертя [4, 5]. Експериментально підтверджено [6], що при терті ковзання в контактній зоні відбувається закономірна деформація граничних шарів середовища та виникнення характерних областей: підвищеного тиску на вході в контакт та розрідження - на виході з контакту, що викликає виникнення відповідних течій в області компресії та в області вакуумування. Ці течії направлені зворотно напрямку руху набігаючих адсорбованих граничних шарів мастильного матеріалу на робочій поверхні модельного валу підшипника. Дослідження траєкторій контактних течій середовища при відносному русі поверхонь із зазором або без зазору між ними з адсорбованими на них граничними шарами, тобто при реалізації тертя граничних приповерхневих шарів середовища, дозволить визначити траєкторії та лінії течій середовища й ефективно ними управляти з метою зменшення тертя та зношування. На переважній більшості існуючих приладів та машин тертя контактні течії граничних шарів раніше не спостерігали, так як не було відомостей про них. Крім цього, всі модельні трибосистеми, як правило, складаються із непрозорих деталей, часто розташовуються в непрозорих камерах, що не дозволяє проводити відеомоніторинг або візуально спостерігати динаміку течій деформованих граничних поверхневих шарів при їх відносному русі. Деякі машини тертя, які дозволяють візуально спостерігати контакт, (згідно з [7], [8] [9]), не застосовувались для визначення динаміки вторинних течій граничних шарів у протилежному обертальному руху напрямку. Вони використовувались лише для визначення товщини змащувального шару в контакті непрямими оптичними, зокрема інтерференційними методами. В основу конструкції пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, покладена задача проектування та створення відповідного пристрою з модельною трибосистемою ковзання, де нерухомий елемент трибосистеми, а саме, пристрій сканування, який є оптично прозорим, а рухома деталь трибосистеми, а саме, ролик (або диск) відповідного радіусу, товщини, шорсткості поверхні контакту з рідинним середовищем, може бути виготовлений з любого матеріалу (на 57465 8 приклад, зі сталі, бронзи, полімерів тощо) та мати різну геометрію (товщина, радіус, шорсткість поверхні тощо). При цьому необхідно забезпечити присутність рідинного середовища у контакті з роликом (чи диском) та можливість візуального спостереження траєкторії лінії течій граничних шарів для досягнення головної цілі - підвищення ефективності трибосистем шляхом активного керування трибоконтактними процесами, що протікають у граничних шарах рідинного середовища. Зміна напрямків течій і, таким чином, підвищення ефективності трибосистем може бути досягнуто шляхом використання різних конструкторськотехнологічних методів та варіантів конструктивного виконання пристрою сканування і ролика (див. схеми на фіг.1-12). Пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення відноситься до засобів випробувань конструкційних матеріалів та змащувального середовища на тертя та зношування, а також до засобів та методів визначення реологічних гідродинамічних параметрів, зокрема градієнту тиску, що призводить до виникнення динамічних течій граничних шарів середовища, в якому відбувається контактна або безконтактна взаємодія поверхонь твердих тіл, а саме поверхонь, що знаходяться у відносному русі з розташованими на них адсорбованими граничними шарами змащувального середовища різної природи. Пристрій (позиція 1) визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення (як варіант конструктивного виконання, що заявляється) містить станину 2, ролик 3, ємність 4 з рідинним середовищем 5, електропривод 6, блок 7 керування та реєстрації параметрів тертя та систему 8 сканування величини локального тиску та його розподілу у площині ковзання (див. блок-схему на фіг. 1 та схеми на фіг. 23). Конструктивно до складу зазначеної системи 8 сканування величини локального тиску та його розподілу у площині ковзання входять пристрій сканування 9, підшипник ковзання 10, мікрометричний гвинт 11, важелі 12, гнучкий шланг 13, сенсори тиску 14 та двохкоординатний столик 15 (див. блок-схему на фіг. 1 та схеми на фіг. 2-3) Конструктивно та технологічно: - зазначений блок 7 керування та реєстрації параметрів тертя виконано з можливістю визначення втрати потужності від тертя ролика (позиція 3) щодо рідинного середовища (позиція 5); - ємність 4 (з рідинним середовищем 5) встановлено на станині 2 нерухомо (див. схеми на фіг. 2-4); - ролик 3 занурено у рідинне середовище 5 не величину не менше 1 % діаметра D зазначеного ролика (позиція 3) (див. схеми на фіг. 2-5); - пристрій сканування 9 виконано у вигляді прозорого конструктивного елемента з внутрішнім каналом 16 (див. схеми на фіг. 2-6); - зазначений внутрішній канал 16 виконано всередині тіла пристрою сканування 9 так, що він, у вигляді приймального отвору 17, з одного боку виходить на контактуючу з роликом 3 робочу плос 9 ку поверхню 18, а з другого боку - з'єднаний через гнучкий шланг 13 з сенсорами тиску 14 (див. схеми на фіг. 2-6); - електропривод 6 (із закріпленим на ньому роликом 3) закріплено/розташовано на двохкоординатному столику 15 (див. схеми на фіг. 2-3) з можливістю переміщення зазначеного ролика 3 відносно приймального отвору 17; - пристрій сканування 9 закріплено консольно на підшипниках ковзання 10 (див. схеми на фіг. 23); - мікрометричний гвинт 11 встановлено з можливістю регулювання визначеної відстані (позиція f) від приймального отвору 17 до ролика 3 (див. схеми на фіг. 2-3); - важіль/важелі 12 встановлено з можливістю забезпечення визначеного осьового навантаження у контакті ролика 3 з контактною поверхнею (позиція 19) пристрою сканування 9 в місті приймального отвору 17 (див. схеми на фіг. 2-3) Конструктивно приймальний отвір 17 виконано або круглого поперечного перетину, або прямокутного, або будь-якої геометричної форми в плані. Зазначений пристрій сканування 9 конструктивно виконано або плоским (див. схеми на фіг, 2-4, 6-7), або криволінійним з радіусом Rs в контакті з роликом 3 рівним чи більше за радіус Rr ролика 3 (де: Rs=Rr, Rs>Rr - див. відповідно, схеми на фіг. 2 та на фіг. 8-9), або від'ємним відносно центру ролика 3 (див. схему на фіг. 10 - як один з можливих варіантів конструктивного виконання пристрою (позиція 1) визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення). Блок 7 керування та реєстрації параметрів тертя виконано з можливістю визначення як втрати потужності від тертя ролика у рідинному середовищі, так і від тертя в присутності робочої поверхні 18 (пристрою сканування 9) в залежності від відстані f між роликом 3 та робочою поверхнею 18 зазначеного пристрою сканування 9 (див. схеми на фіг. 11), що регулюється мікрометричним гвинтом 11, або від рівня їх стиснення шляхом навантаження пристрою сканування 9 важелями 12. Також зазначений блок 7 керування та реєстрації параметрів тертя виконано з можливістю завдання необхідної швидкості обертання електроприводу 6 та визначення вимірюваних параметрів тертя. Сенсори тиску 14 з'єднано з вимірювальним приладом 20 (див. блок-схему на фіг. 1 та схеми на фіг. 2-3). Пристрій (позиція 1) визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, працює (використовується для визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення) таким чином. При переміщенні прозорого пристрою сканування 9 (з внутрішнім каналом 16 та приймальним отвором 17 навколо осі 21 обертання підшипника ковзання 10, який є нерухомим відносно станини 2, за допомогою мікрометричного гвинта 11 встановляється необхідний зазор f (між роликом 3 та робочою поверхнею 18 зазначеного пристрою сканування 9 - див. схеми на фіг. 7-11), або за допомогою важелів 12 створюється контакт прозо 57465 10 рого пристрою сканування 9 з обертовим роликом 3 (який закріплено на валу електроприводу 6). Далі за допомогою регулювальних мікрометричних гвинтів 11 пристрій сканування 9 фіксується у положенні, коли робоча площина W пристрою сканування 9 буде паралельною дотичній лінії (контактна поверхня 19) до робочої поверхні 18 ролика 3 (що утворює циліндр) - див. схему на фіг. 12. Таким чином за допомогою мікрометричного гвинта 11 встановлюється необхідний зазор f між роликом 3 та робочою поверхнею 18 зазначеного пристрою сканування 9, або за допомогою важелів 12 встановлюється їх контакт (див. схему на фіг. 11). У разі дослідження рідкого рідинного середовища 5 (масло, пальне, гідравлічні рідини, вода, водні розчини та інше), його заливають у ємність 4 (див. схеми на фіг. 2-5). По закінченню підготовчих операцій за допомогою блоку керування 7 (позиція «БУ» - див. схему на фіг. 2) подається струм на електропривод 6 і встановлюється певна частота обертання ролика 3 (який конструктивно і технологічно закріплено на валу зазначеного електропривода 6) - див. схеми на фіг. 2-4. В процесі випробувань шляхом переміщення (позиції X і Y - див. схему на фіг. 2) двох координатного столика 15, на якому закріплено електропривод 6, приймальний отвір 17 зміщується у необхідне контрольоване положення відносно ролика 3 (див. схему на фіг. 12). Під час обертання ролика 3 в області мінімальної відстані (позиція f - див. схему на фіг. 11) його рухомої поверхні до робочої поверхні 18 пристрою сканування 9 (із контрольованим зазором f завдяки мікрометричному гвинту 11) на плоскій грані пристрою сканування 9 відбувається контактна взаємодія граничних шарів рідинного середовища 5 за рахунок руху робочої поверхні ролика 3. Таким чином ролик 3, що обертається та контактує адсорбованими на його робочій поверхні граничними шарами рідинного середовища 5, взаємодіє з граничними шарами, що розташовані на нерухомій плоскій поверхні пристрою сканування 9. Це призводить до їх стиснення в конфузорній області контакту за напрямком руху, а в дифузорній - до розтягування середовища, що в свою чергу призводить до виникнення відповідних течій граничних шарів в контактній та позаконтактній зонах. В іншому випадку під час обертання (позиція ω - див. схему на фіг. 2) ролика 3, а саме, при навантаженні (позиція N - див. схему на фіг. 2) важелями 12 (див. схеми на фіг. 2-3), в області контакту також відбувається стиснення або розрідження досліджуваного рідинного середовища 5, в результаті чого у приймальному отворі 17 підвищується (позиція +ΔР - див. схему на фіг. 2) або зменшується (позиція –ΔР – див. схему на фіг. 2) тиск відносно тиску навколишнього середовища, який передається через внутрішній канал 16 (що виконано всередині тіла пристрою сканування 9) через гнучкий шланг 13 на сенсори тиску 14. В обох випадках електричний сигнал від сенсорів тиску 14 передається на вимірювальний прилад 20 (як варіант конструктивного виконання). 11 Шляхом позиціювання приймального отвору 17 відносно твірної лінії поверхні ролика 3 здійснюється вимірювання тиску та сканування, завдяки чому визначається розподіл його в залежності від вихідних параметрів, а саме: швидкість обертання валу (позиція 3), величина зазору (позиція f) або осьового навантаження, фізико-хімічні властивості середовища (газоподібні, рідкі, багатофазні та інше), шорсткість поверхонь та інше в залежності від поставленої задачі дослідження (див. графік розподілу тиску ΔР від координати відносно зони контакту «А-В» ролика 3 з пристроєм сканування 9 (див. фіг. 13). В рамках даної корисної моделі (в основу якої покладено варіант конструктивного виконання пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється) пристрій сканування 9 являє собою паралелепіпед, який виконано з прозорого матеріалу. Виготовлення пристрою сканування 9 прозорим забезпечує можливість візуального спостереження за процесом трибокавітації (див. фіг. 14-15), а також контролю, відеомоніторингу динаміки течій середовища і визначення їх траєкторій. Використання конструкції пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, дозволить створювати нові технологічні прийоми по підвищенню ефективності безконтактних та контактних трибосистем ковзання, а також розробляти нові мастильні матеріали і присадки до них за критерієм порогу трибокавітації. Підвищення ефективності застосування пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, у порівнянні з прототипом, досягається шляхом виконання 3 прозорим та виготовлення в ньому внутрішнього каналу з приймальним отвором на робочій поверхні, здійснюється вимірювання тиску в граничних шарах рідинного середовища у контактній області. Підвищення 57465 12 ефективності застосування пристрою визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення, який заявляється, у порівнянні з прототипом, досягається й тим, що виготовлення З прозорим забезпечує можливість візуального спостереження за процесом трибокавітації. ДЖЕРЕЛА ІНФОРМАЦІЇ 1. Патент РФ № RU 2279660 «Способ определения противоизносных и (или) антифрикционных свойств трибосистемы с одним линейным контактом постоянной протяженности и устройство для его осуществления». МПК (6) G 01 N 3/56, Опубл. 10.07.2006. Бюл. № 19. Автори/заявники: Стельмах А.У., Кияшко С.Н., Костюник Р.Е., Терновая Т.В., Сидоренко А.Ю. 2. Никитин А.К., Ахвердиев К.С, Остроумов Б.И. Гидродинамическая теория смазки деталей машин. М.: Машиностроение, 1976. - с. 304. 3. Авторське свідоцтво СРСР № 91589 «Прибор для непрерывного измерения толщины смазочного слоя в подшипнике скольжения». МПК G 01 N 3/56, Бюл. изобретений, 1950, № 16. Автори/заявники: Д.С. Коднир, Л.М. Ронин, М.Д. Медвинский, Э.Ф. Зоммер - аналог. 4. Стельмах А.У. Компрессионно-вакуумный механизм адгезионного трения и изнашивания. 28 с. - Деп. в ГНТБ Украины 07.07.2008, № 109 – Ук2008 - прототип. 5. Стельмах А.У Возникновение контактных струйных течений в условиях граничной смазки и механизм их образования. 43 с. - Деп. ГНТБ Украины 14.04.09, № 20 – Ук 2009. 6. Патент РФ № RU 2972 «Установка для измерения толщины смазочного слоя в подшипниках». МПК (6) G 01 N 3/56, Опубл. 15.05.1992. Автори/заявники Дмитриченко Н.Ф. Мнацаканов Р.Г., Белоус B.C., Грабчак В.Г. 7. Авторське свідоцтво СРСР № 1028352. 8. Авторське свідоцтво СРСР № 1227986. 9. Авторське свідоцтво СРСР № 1128315. 13 57465 14 15 57465 16 Фіг.14 17 57465 18 Фіг.15 Комп’ютерна верстка І. Скворцова Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determination of triborheological characteristics of slide friction under conditions of boundary lubrication
Автори англійськоюStelmakh Oleksandr Ustymovych, Bondar Volodymyr Semenovych, Badir Karim Kashash, Ibraimov Tariel Tolomushevych
Назва патенту російськоюУстройство для определения трибореологических характеристик трения скольжения b условиях предельного смазывания
Автори російськоюСтельмах Александр Устимович, Бондарь Владимир Семенович, Бадир Карем Кашаш, Ибраимов Тариель Толомушевич
МПК / Мітки
МПК: G01N 3/56
Мітки: визначення, граничного, умовах, тертя, пристрій, ковзання, характеристик, трибореологічних, змащення
Код посилання
<a href="https://ua.patents.su/9-57465-pristrijj-viznachennya-triboreologichnikh-kharakteristik-tertya-kovzannya-v-umovakh-granichnogo-zmashhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій визначення трибореологічних характеристик тертя ковзання в умовах граничного змащення</a>
Спосіб змащення підшипників ковзання рідинного тертя
Номер патенту: 4944
Опубліковано: 15.02.2005
Автори: Білоус Юрій Павлович, Булюк Микола Григорович
МПК: F16C 17/00
Мітки: змащення, тертя, спосіб, рідинного, підшипників, ковзання
Формула / Реферат:
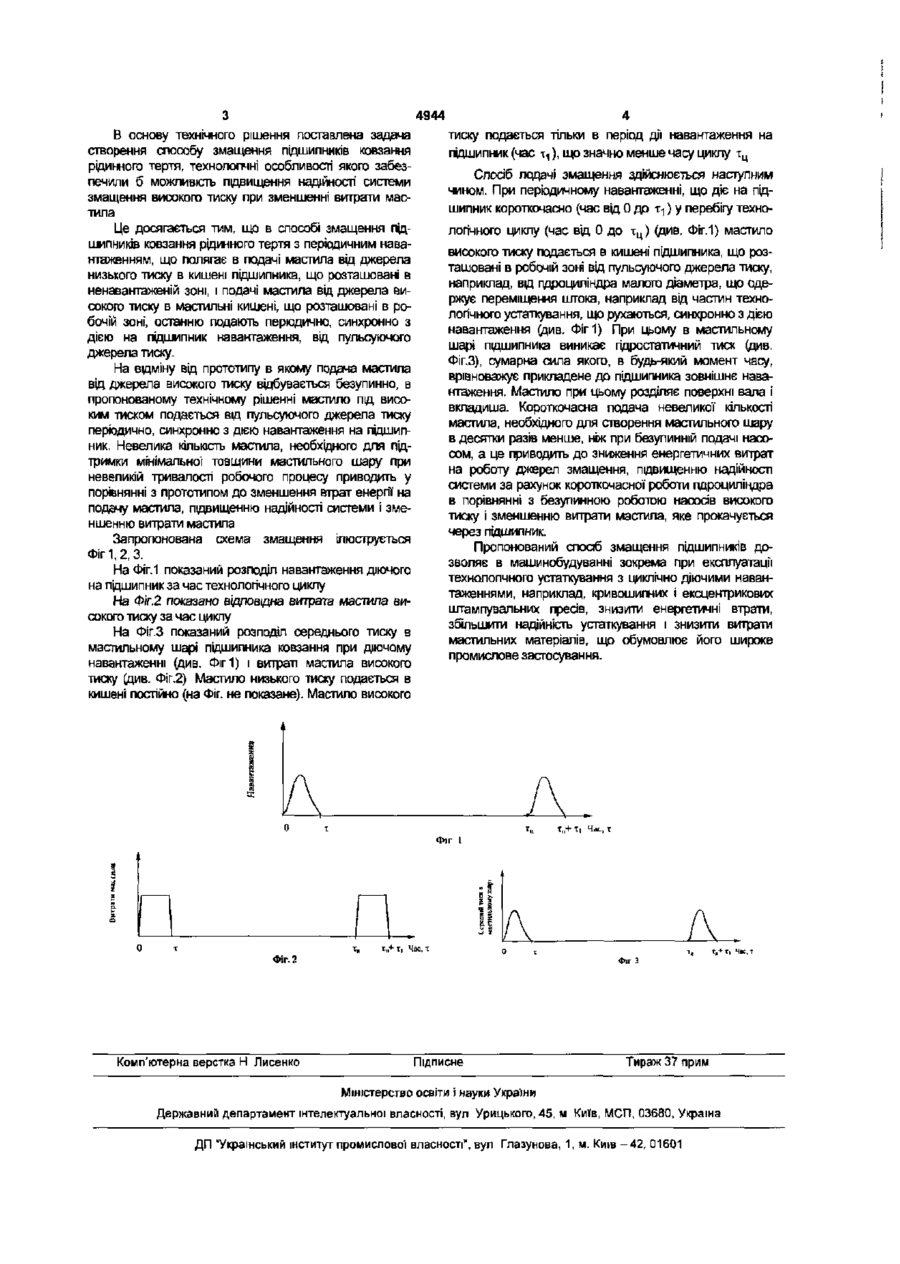
Спосіб змащення підшипників ковзання рідинного тертя, що включає подачу мастила від джерела низького тиску в кишені підшипника, що розташовані в ненавантаженій зоні, і подачу мастила від джерела високого тиску в мастильні кишені, що розташовані в робочій зоні, який відрізняється тим, що подачу мастила від джерела високого тиску виконують від пульсуючого джерела тиску періодично, синхронно з дією навантаження на підшипник.
Пристрій для визначення коефіцієнта тертя ковзання
Номер патенту: 4591
Опубліковано: 17.01.2005
Автори: Губачева Лариса Олександрівна, Гладушин Віталій Васильович, Семенов Анатолій Григорович, Нечаєв Григорій Іванович
МПК: G01N 19/02
Мітки: визначення, ковзання, коефіцієнта, тертя, пристрій
Формула / Реферат:
Пристрій для визначення коефіцієнта тертя ковзання, що містить корпус, два симетрично розташованих контрзразки під навантаженням, між якими знаходиться тіло, який відрізняється тим, що контрзразки розташовано з можливістю синхронного розвороту у протилежних напрямках навколо спільної осі тіла, встановленого на опору з поверхнею, перпендикулярною площині розвороту контрзразків, на корпус нанесено шкалу виміру кута розвороту контрзразків.
Пристрій для визначення коефіцієнта тертя ковзання біологічного матеріалу
Номер патенту: 7459
Опубліковано: 15.06.2005
Автори: Білоножко Володимир Михайлович, Ярошенко Володимир Федорович, Рибалко Вячеслав Миколайович
МПК: A01D 3/00
Мітки: визначення, матеріалу, пристрій, коефіцієнта, тертя, біологічного, ковзання
Формула / Реферат:
Пристрій для визначення коефіцієнта тертя ковзання біологічного матеріалу, що містить основу, повзун, механізм переміщення повзуна, пружини та засоби виміру деформації пружин, який відрізняється тим, що повзун із механізмом його переміщення рухомо закріплений на основі пристрою з можливістю зміни нахилу повзуна відносно вертикальної площини, а на його робочій поверхні встановлені пасивні різальні елементи.
Пристрій для визначення трибоелектрохімічних характеристик матеріалів в умовах корозійного впливу електролітів
Номер патенту: 32128
Опубліковано: 12.05.2008
Автори: Широков Володимир Володимирович, Василів Христина Броніславівна, Рудковський Євген Мар'янович, Широков Олексій Володимирович
МПК: G01N 13/00
Мітки: умовах, корозійного, характеристик, трибоелектрохімічних, впливу, пристрій, матеріалів, електролітів, визначення
Формула / Реферат:
Пристрій для визначення трибоелектрохімічних характеристик матеріалів в умовах корозійного впливу електролітів, який включає вузол тертя з системою навантаження, імпульсний потенціостат ПИ 50.1 і програматор ПР-8, який відрізняється тим, що для підвищення частоти реєстрації сигналу та автоматичної побудови графіків кінетики зміни поверхневого трибопотенціалу та поляризаційних кривих комплектується адаптованим аналого-цифровим перетворювачем і...
Пристрій для визначення характеристик деформованості ґрунтів в умовах одновісного стиску
Номер патенту: 56732
Опубліковано: 25.01.2011
Автори: Винников Юрій Леонідович, Косточка Наталія Аркадіївна
МПК: E02D 1/00
Мітки: ґрунтів, умовах, одновісного, визначення, деформованості, пристрій, стиску, характеристик
Формула / Реферат:
Пристрій для визначення характеристик деформованості ґрунтів в умовах одновісного стиску, що містить жорстке, наприклад, металеве кільце, в якому розміщено попередньо відібраний зразок ґрунту, встановлене на жорстке, перфороване, кругле в плані днище, розміщений на зразку ґрунту по його вертикальній осі жорсткий, перфорований, круглий у плані штамп із заглибленнями на його верхній поверхні для обпирання стійок завантажувальних пристосувань і...
Попередній патент: Універсальний ковпачок для ялинкової прикраси
Наступний патент: Спосіб люмінесцентного аналізу
Випадковий патент: Рідинна ракетна двигунна установка щільного компонування з регульованим вектором тяги