Пристрій захисту асинхронного двигуна
Номер патенту: 69523
Опубліковано: 15.09.2004
Автори: Живора Валерій Федорович, Родькін Дмитро Йосипович, Чорний Олексій Петрович, Сидоренко Валерій Миколайович, Лашко Юрій Вікторович

Формула / Реферат
1. Пристрій захисту асинхронного двигуна, який включає асинхронний двигун, підключений до мережі через комутаційний пристрій, трансформатори струму, трансформатори напруги, відключаючий апарат з релейним елементом, який відрізняється тим, що в нього додатково введені трансформатор струму, трансформатор напруги та блок прийняття рішення, причому виходи трьох трансформаторів струму та трьох трансформаторів напруги підключені до входів блока прийняття рішення, перший вихід якого підключений до індикатора, а другий вихід - до входу відключаючого апарата.
2. Пристрій по п. 1, який відрізняється тим, що крім захисних функцій контролю обриву фаз мережі, короткого замикання, перевищення максимального струму, перевантаження по струму та потужності додатково має нові функціональні можливості контролю перевищення температури обмоток статора окремо для кожної фази, перевищення температури нагріву обмоток ротора, розрахунку часу досягнення допустимої температури нагріву і відключення АД від мережі, контролю перевищення динамічного навантаження на підшипники, моніторингу за показником вібрацій із виявленням, на підставі порівняння гармонік електромагнітного моменту та швидкості, показника якості перетворення енергії в асинхронному двигуні відповідно до формули:
 ,
,
де: j=1,2,…N,
N – кількість вимірювань на періоді.
Текст
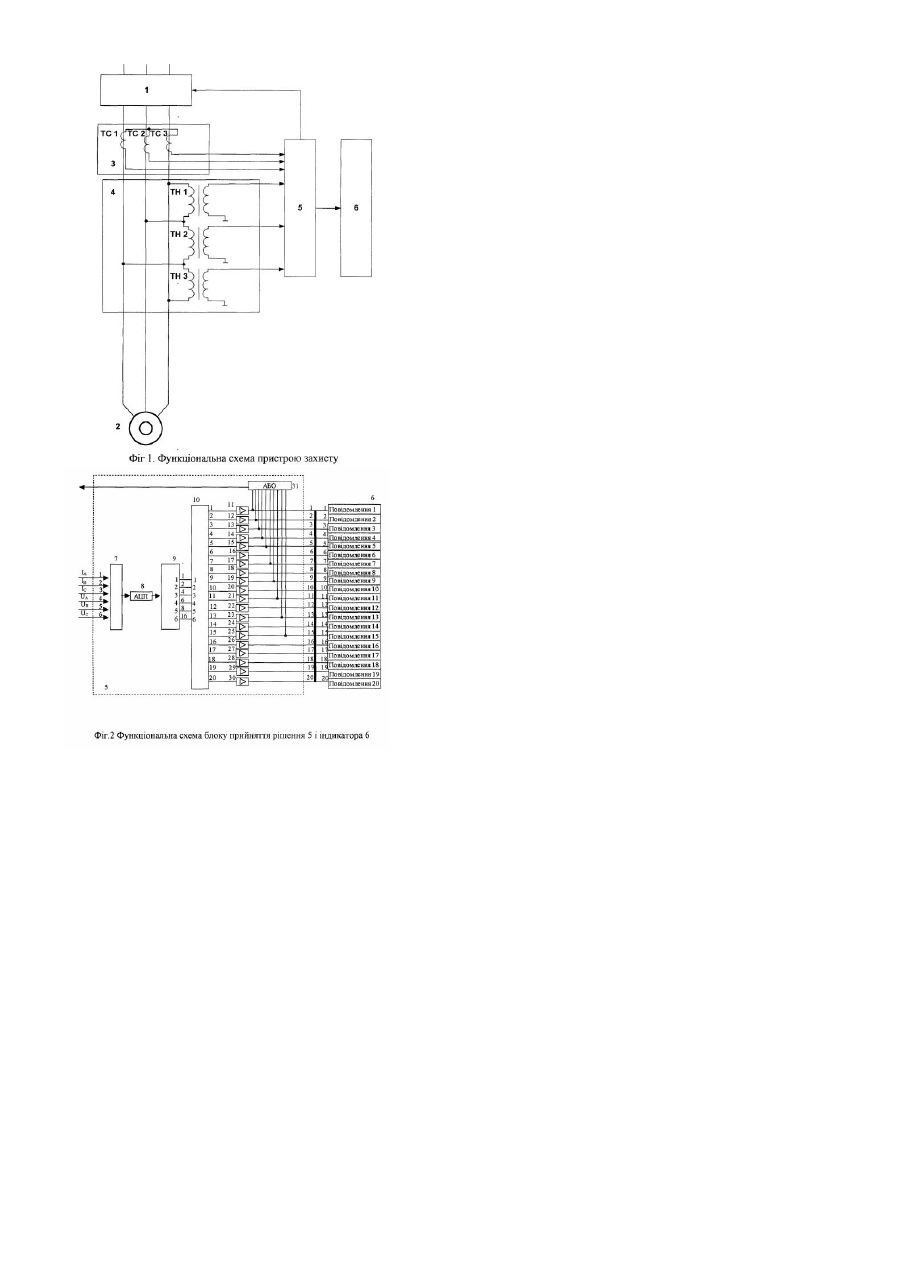
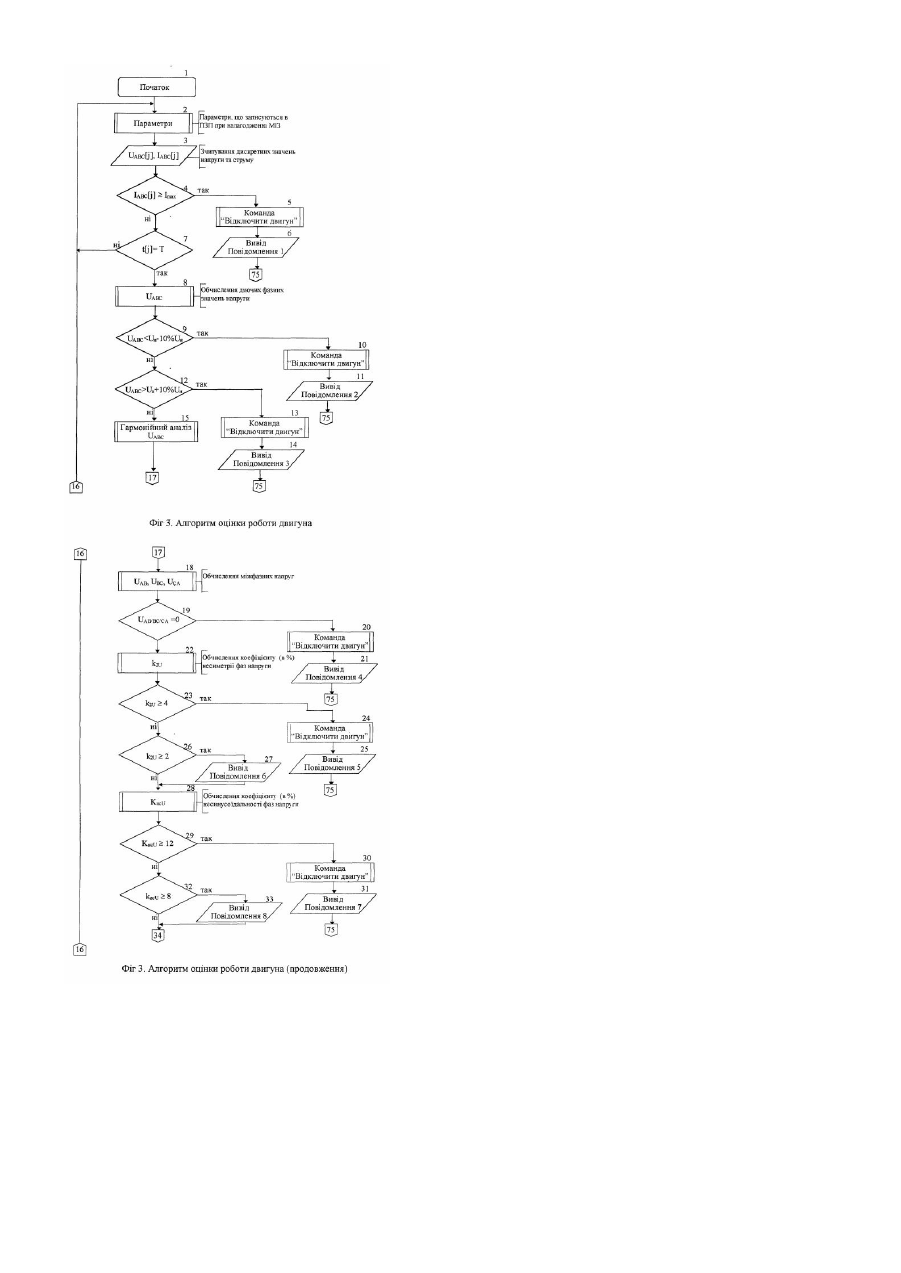
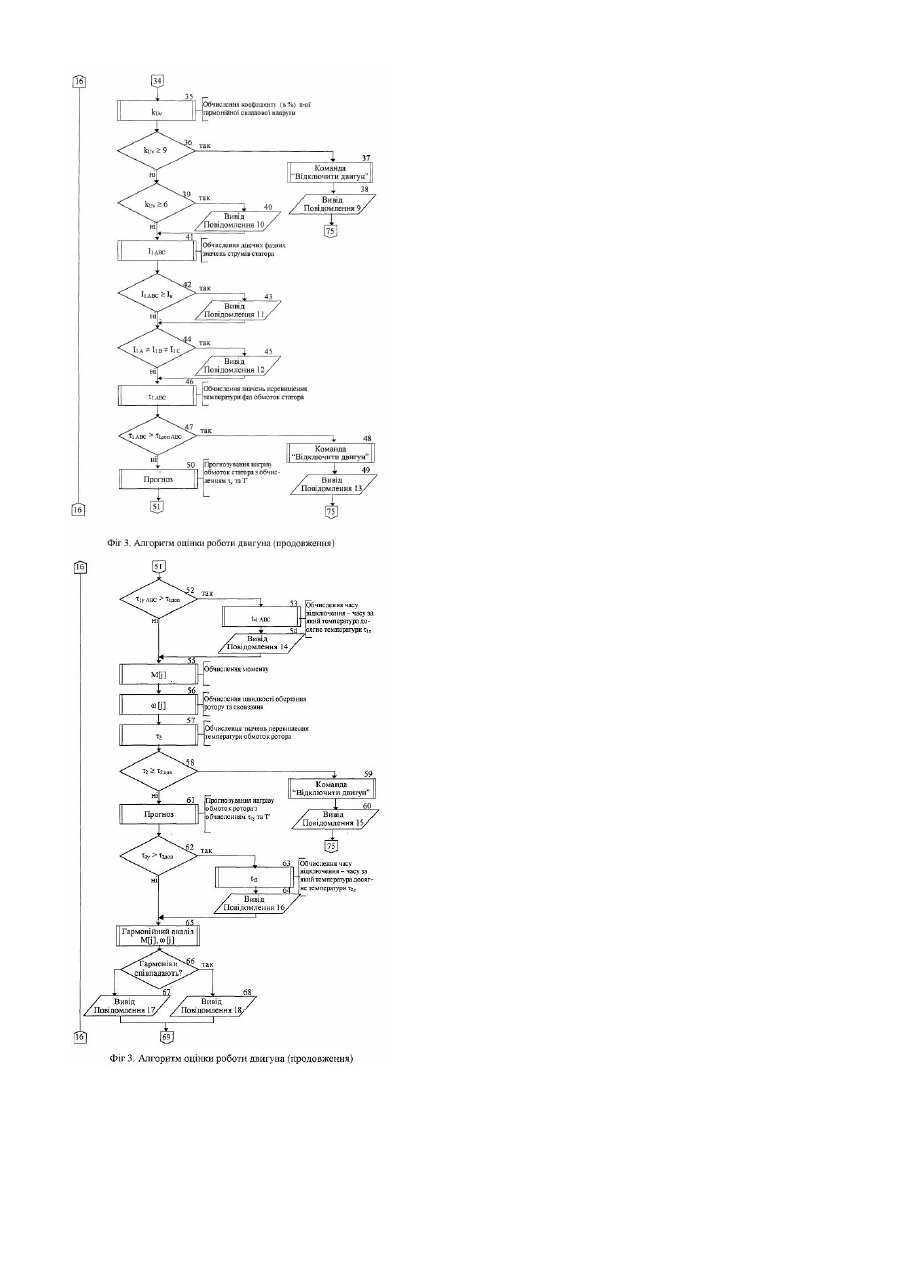
Пристрій відноситься до електротехніки, а саме до пристроїв захисту асинхронних двигунів в аварійних режимах та режимах які мають привести до виходу з ладу і може бути використаний в електричних приводах змінного струму для підвищення ресурсу працездатності за умови попередження розвитку аварійної ситуації. Відомий пристрій захисту асинхронного двигуна [АС СССР N1220045 Устройство для температурной защиты асинхронного электродвигателя] який включає вмонтовані у кожну обмотку і з'єднані послідовно позистори, вихідна напруга яких, що пропорційна температурі нагрівання обмоток, подається на регулюючий орган, що з'єднаний з ланкою включення магнітного пускача. Недоліком пристрою є те, що сигнал пропорційний температурі нагрівання обмоток відображає сумарний еквівалент температури нагріву двигуна, тоді як із-за несиметрії фазної напруги, або параметрів двигуна одна з фаз може бути перегрітою, а сумарний сигнал знаходиться в межах норми. Це призведе до виходу з ладу перегрітої фази і двигуна в цілому. Найбільш близьким до пристрою, що пропонується є пристрій захисту асинхронного двигуна [АС СССР N1226564 Устройство для защиты от перегрузки асинхронного двигателя], який включає два трансформатора струму в різних фазах та один трансформатор напруги включений на дві фази, виходи трансформаторів підключені до реагуючи х блоків і при перевищенні струмів фаз над допустимими статорна обмотка відключається від мережі, трансформатор напруги реагує на обрив однієї з фаз і через реагуючі блоки формує сигнал на відключення статорних обмоток двигуна від мережі. Недоліком указаного пристрою є те, що: - до перегріву обмоток може призвести не тільки обрив фази, а й несиметрія фазної напруги, що не враховується; - при несиметрії параметрів двигуна, наприклад активних опорів фаз, у фазі, що не містить датчика струму трансформатора струму може перевищувати допустимий за рівнем втрат, обмотка перегріється і двигун вийде з ладу. Цей пристрій приймається в якості прототипу. Мета винаходу - розширення функціональних можливостей та ефективності захисту асинхронного двигуна в усталеному режимі роботи. Поставлена мета досягається тим, що у відомий пристрій, який складається з двох трансформаторів струму, одного трансформатора напруги, відключаючий апарат, що відключає статорну обмотку додатково введені трансформатор струму і два трансформатори напруги, причому виходи трансформаторів струму та трансформаторів напруги підключаються до входів блоку прийняття рішення, перший вихід якого підключений до індикатора, другий ви хід - вхід відключаючого, статор асинхронного двигуна від мережі, апарата. Робота пристрою ілюстрована такими фігурами. Фігура 1. Функціональна схема пристрою. Фігура 2. Функціональна схема блоку прийняття рішення 5 і індикатора 6. Фігура 3. Алгоритм роботи пристрою. Пристрій складається з керованого відключаючого апарата 1, асинхронного двигуна 2, блока датчиків струму 3 та напруги 4, блока прийняття рішення 5 та індикатора 6. Блок прийняття рішення 5 включає комутатор 7 входи якого підключені до виходів датчиків струму блока 3 та датчиків напруги блока 4, вихід комутатора через АЦП підключений до програмованого мікроконтролера 10, виходи якого через підсилювачі 11-29 відповідно підключені до 1-19 входів індикатора 6, причому виходи 11, 12, 13, 14, 15, 17, 19, 21, 23, 25 підсилювачів підключені до входів блока 31, що виконує логічну функцію АБО, ви хід якого з'єднаний з керуючим входом апарата 1. Пристрій працює наступним чином. При підключеному до мережі через апарат 1 асинхронному двигуні 2 в блоку датчиків струму 3 та датчиків напруги 4 вимірюються миттєві значення фазних струмів і напруг, які подаються до блоку прийняття рішення 5 в якому виконується оцінка режиму роботи асинхронного двигуна та висвітлюється на індикаторі 6. При виникненні аварійної ситуації, що може привести до виходу асинхронного двигуна з ладу в наступному відповідна інформація висвітлюється на індикаторі 6; при виникненні аварійної ситуації формується сигнал на вимикання апарата 1 і відключення асинхронного двигуна від мережі, відповідна інформація висвітлюється на індикаторі 6. Блок прийняття рішення 5 працює таким чином, через комутатор 7 та АЦП 8 подаються сигнали до програмованого контролера 9, який за заданим алгоритмом (фіг.3) виконує оцінку режиму роботи двигуна 2, та видає на вихід двійковий код, цей код розшифровується у дешифраторі 10 який встановлює на відповідному своєму виході логічний сигнал високого рівня. Цей сигнал підсилюється відповідним підсилювачем до значення необхідного для висвітлення напису на індикаторі 6 або вимкнення апарату 1. Аналіз інформації в програмованому контролері 9 виконується за алгоритмом зображеним на фіг.3. Опис алгоритму та математичного забезпечення. Блок 2 містить паспортні та розрахункові параметри асинхронного двигуна, які використовуються в алгоритму. Вказані параметри записуються в ПЗП мікроконтролера 9 при налагоджені пристрою до експлуатації з конкретним асинхронним двигуном. Запис необхідної інформації здійснюється з допомогою комп'ютеризованого переносного пристрою. До цих параметрів відносяться паспортні або сертифіковані дані на двигун: R10 АВС , R20 АВС - фазні значення опорів обмоток відповідно статора та ротора, I10 АВС, I20 АВС - фазні значення струмів в обмотках відповідно статора та ротора, UH - номінальне значення мережної напруги, Іmax - значення максимального струму, Ін - номінальне значення струму статора, t1доп , t 2 доп - значення допустимого перевищення температури нагріву обмоток відповідно статора та ротора, які визначаються класом ізоляції, a - значення температурного коефіцієнту опору міді - обмоток (дорівнює 0,004 і вважається незмінним), m 1, m 2 - маса міді - відповідно обмоток статора та ротора, с - питома теплоємність міді, kТВ - коефіцієнт тепловіддачі, S1ox, S2ox - площа поверхні охолодження відповідно обмоток статора та ротора, t t 1ABC , t t 2 - значення часу через який відповідно перевищення температури обмоток статора та ротора t t досягнуть значень 1доп та 2доп за умови незмінності (або не швидкої зміни) процесів, що протікають, r - значення зовнішнього радіусу ротора, Prr, Pr - табличне та розрахункове значення динамічної вантажопідйомності підшипника (визначається типом підшипника), р - кількість пар полюсів, kб - значення коефіцієнту безпеки, kт - значення температурного коефіцієнту. Блоки 3, 7 забезпечують збереження в пам'яті дискретних миттєвих значень напруги та струму, що надходять з трансформаторів, відповідно UABC[j], IABC[j] (блок 3), кількість (j=1,2,…,N) яких контролюється блоком 7. Блоки 4-6 призначені для ідентифікації ситуації "КЗ" (блок 4) із формуванням команди (блок 5) на відключення асинхронного двигуна від мережі та видачею відповідного повідомлення (блок 6) на табло. Блок 8 призначений для обчислення діючих значень фазних напруг. Обчислення для кожної фази виконується за формулою: Uд = 1 N å (U[j]) 2 . (1) j Блоки 9-14 призначені для ідентифікації ситуації, відповідно до Держстандарту 13109-87, "Пониження напруги" (блок 9) та "Перевищення напруги" (блок 12) напруги мережі з формуванням команди на відключення асинхронного двигуна від мережі (відповідно до ситуації блок 10 або блок 13) та видачею повідомлення (відповідно до ситуації блок 11 або блок 14). Блок 15 призначений для виконання гармонійного аналізу сигналів напруги UABC[j] згідно алгоритму дискретного перетворення Фур'є. Блоки 18-21 призначені для ідентифікації ситуації "Обрив однієї чи двох фаз мереженої напруги" (блок 19) із формуванням команди (блок 20) на відключення асинхронного двигуна від мережі та видачею відповідного повідомлення (блок 21) на табло. Ідентифікація проводиться шляхом перевірки умов (блок 19): U AB = 0ü ï (2) UBC = 0ý UCA = 0ï þ виконання хоча б однієї з умов (2) й є до ідентифікацією даної ситуації. Блоки 22-27 призначені для ідентифікації ситуації "Несиметрія фаз напруги". Дана ситуація ідентифікується відповідно до Держстандарту 13109-87 із допомогою значення коефіцієнта несиметрії фаз напруги k2U (блок 22) з перевіркою умови 23, за результатом якої формується відповідна їй команда (блок 24) на відключення асинхронного двигуна від мережі та відповідне повідомлення (блок 25) або перевіркою умови 26 за результатом якої формується відповідне їй повідомлення (блок 27). Блоки 28-33 призначені для ідентифікації ситуації "Несинусоїдальність фаз напруги". Дана ситуація ідентифікується відповідно до Держстандарту 13109-87 із допомогою значення коефіцієнта несинусоїдальності фаз напруги kнсU (блок 28) з перевіркою умови 29, за результатом якої формується відповідна їй команда (блок 30) на відключення асинхронного двигуна від мережі та відповідне повідомлення (блок 31) або перевіркою умови 32 за результатом якої формується відповідне їй повідомлення (блок 33). Блоки 35-40 призначені для ідентифікації ситуації "Несинусоїдальності n-ої гармонійної складової фаз напруги". Дана ситуація ідентифікується відповідно до Держстандарту 13109-87 із допомогою значення k коефіцієнта гармонійної складової фаз напруги Un (блок 35) з перевіркою умови 36 за результатом якої формується відповідна їй команда (блок 37) на відключення АД від мережі та відповідне повідомлення (блок 38) або перевіркою умови 39, за результатом якої формується відповідне їй повідомлення (блок 40). Контроль проводиться тільки для непарного порядку гармонік. Блок 41 призначений для обчислення діючих значень фазних струмів статора. Обчислення для кожної фази виконується за формулою: Iд = 1 N å (I[ j]) 2 . (3) j Блоки 42-43 призначені для ідентифікації ситуації "Перевантаження по струму" (блок 42) із видачею відповідного повідомлення (блок 43) на табло. Блоки 44-45 призначені для ідентифікації ситуації "Несиметрія струмів фаз статора" (блок 44) із видачею відповідного повідомлення (блок 45) на табло. Ідентифікується виконується шляхом парного порівняння значень (блок 40): I1A ¹ I1B ü ï (4) I1A ¹ I1C ý I1B ¹ I C ï þ виконання хоча б однієї з умов й є ідентифікацією даної ситуації. Блоки 46-49 призначені для ідентифікації ситуації "Перевищення температури фаз обмоток статора". Блок 46 обчислює поточні значення перевищення фазних температур обмоток статора, блок 47 забезпечує перевірку умови за результатами якої формується команда (блок 48) на відключення асинхронного двигуна від мережі та видається відповідне повідомлення на табло (блок 49). Обчислення значень перевищення температури обмоток статора виконується за, наступною методикою (пояснення надано у загальному вигляді відносно однієї фази). Значення перевищення температури (по фазам АВС) обмоток статора t1( T ) обчислюються в усталеному режимі на кожному періоді (Т) зміни сигналів напруги та струму на підставі рівняння теплового балансу: (5) DPdt = cmdt + k TB S ox tdt, DP - утрати в обмотках. Враховуючи, непостійність утрат, за умови незмінності (або незначної зміни) де навантаження машини за період зміни напруги та залежності опору обмоток від температури: (6) R1 = R 0 (1 + at) утрати в міді (обмотках): 2 DP = I1 R1 = IR10 (1 + at), де I2 , R1 1 (7) - діючі значення струму та опору обмоток статора; D P0 - утрати в міді при початковій температурі. 2 DP0 = k TB S ox t 0 = I10 R10 Або теж саме, - утрати в машині під час нагрівання за умови їх незмінності та незмінності значення kTB. Отже перевищення температури обмоток статора обчислюється за виразом: t1 = ö 1 æ R1 ç - 1÷ ÷ a çR0 è ø (8) (t ) для кожної фази статора 1 ABC за період зміни напруги та струму, що минув. Значення опору R1 для кожної фази обмоток статора визначається на підставі регресійної моделі визначення фазних стр умів статора, яка в загальному випадку записана для значень активних опорів має вигляд: ABC I ABC ( r) = b0 + å ABC b ir i + i r= åb r r , ij i ij (9) ij R1реальне R1паспортне b,b де - коефіцієнт активної несиметрії статорних обмоток двигуна, i ij - коефіцієнти моделі. Блоки 50-54 призначені для виконання прогнозу щодо подальшого нагріву обмоток статора на підставі (t ) обчислених нових значень усталеної температури 1y та параметру часу (Т') на підставі рівняння теплового балансу (його рішення) (блок 50). Далі за результатами перевірки умови (блок 52) обчислюється час (блок 53), по досягненні якого двигун необхідно відключити від мережі при цьому на табло (блок 54), видається відповідне повідомлення. Прогноз нагріву обмоток статора та обчислення прогнозованого часу відключення асинхронного двигуна проводиться за наступною методикою (пояснення надано у загальному вигляді відносно однієї фази). Маючи обчислене значення перевищення температури обмоток статора t1, яке вважається кінченим перевищення температури (тобто t y 0 = t1 ), значення якого залежить від поточних утрат в обмотках для t поточного моменту часу. На підставі величини y 0 обчислюється нове значення усталеного перевищення t температури y за формулою: t y0 (10) ty = 1 - at y0 ty = або DP , k TB Sox 3 де DP - поточні утрати в обмотках. Також вважаючи, що в усталеному режимі рівняння теплового балансу приймає вигляд DP ty = , k TB Sox 3 рівняння теплового балансу (1) має вигляд: враховуючи (11) k TB S ox (t y - t )dt = c × mdt DPdt = k TB S ox t y dt, (t - t)dt = Tdt . або y Рішення якого має вигляд: cm T¢ = (1 + t y ). (12) k TB S ox Параметр часу T¢ залежить від поточного перевищення температури, який визначається поточним навантаженням. t ,t , На підставі значень y 1доп T¢ за виразом: æ - t 1 доп - t y t t1 = -Lnç ç ty - t0 è ö ÷ × T¢ ÷ ø (13) t визначається шуканий час t 1 - час через який перевищення температури обмоток статора досягне значення t 1доп . Блоки 55-56 призначені для обчислення дискретних значень динамічного моменту M[j] (блок 54), швидкості v [ j ] (блок 55) (j=1, 2,...,N). Обчислення моменту, швидкості виконується за наступними методиками. Обчислення моменту (М). На підставі системи рівнянь електричної рівноваги контурів статора, записаної в дискретних, виміряних значеннях, обчислюються значення похідних потокозчеплень статора: dy ABC [ j] (14) = UABC [ j] - I ABC [ j]R ABC , dt де j=1, 2,...,N, N - кількість вимірювань на періоді; UABC [ j], I ABC [ j] - миттєві значення напруги та стр уму в ланцюгу статора, RABC - фазні значення опорів обмоток статора. Вихідні потокозчеплення YABC [ j] обчислюються, застосовуючи метод чисельного інтегрування. Після чого обчислюється електромагнітний момент двигуна за формулою: 1 M[i] = {(UA [ j]I A [ j+]UB [ j]IB [ j+] + UC [ j]I C [ j+]) + w0 (15) ü æ dy A [ j] dy B [ j] dy C [ j] ö ï 2 2 2 +ç ç dt I A [ j] + dt I B [ j] + dt I C [ j] ÷ - (I A [ j] R A + I B [ j] R B + I C [ j] R C )ý, ÷ ï è ø þ яка отримана на підставі рівняння балансу потужностей. Обчислення швидкості (w r ) проводиться за виразами: y ar é1 =ê ê tr ë æ Lm d y ar ç I ç t as dt è r ö æL dy b r ÷ - wr ç m Ib s ÷ çt dt ø è r -1 öù æ 2 1 ö ÷ ; ÷ú × çw r + ÷ú ç 2 tr ÷ øû è ø (16) -1 é æ Lm dy b r öù æ 2 dy ar ö 1 æ L m 1 ö ÷ . ÷ç wr ÷ú × ç w r + y br = êw r ç I as Ibs 2 dt ÷ t r ç tr dt ÷ ú ç ê ç tr tr ÷ è ø è øû è ë ø w r система рівнянь асинхронного двигуна, що записана Для вирішення (16) відносно вихідної швидкості відносно потокозчеплень в ортогональній системі координат a, b, нерухомої відносно статора диференціюється: 0= 0= d 2 y ar 2 dt d2 y br dt 2 + Rr +Rr dy br dw r dI ar + wr + y ; dt dt dt br dI br dy ar dwr + wr + y , dt dt dt ar (17) dw r , вирішивши сумісно (16), (17) і вилучивши dt отримується (18) Awr2 + Bw r + C = 0, де 2 2 æ dy br ö Lm æ dy b r æ d y ar ö d y ar ö ÷ ç ÷ A =ç ç ÷ ç dt ÷ + ç dt ÷ - t çI bs dt + I as dt ÷; è ø r è è ø ø B= 2 Lm æ dy br L dIb r dy ar ö æ dy ar öæ d y br ç Ibs ÷ + ç I as m ÷ç - I as + Rr 2 ç ÷ ç ÷ç 2 dt dt ø è tr dt ø dt dt tr è è æ Lm dy b r - ç Ib s ç tr dt è ö æ d 2 y ar dI ÷ç + R r ar ÷ç 2 dt ø è dt ö ÷; ÷ ø ö æ L dy br öæ d 2 y br dIbr ö ù ÷ ú. ÷ + ç Ib s m ÷ç + Rr ÷ ç tr dt ÷ç dt 2 dt ÷ ú è øè ø øû v [ j ] ( j = 1 2, ..., N). , Звідки обчислюються дискретні значення швидкості Блоки 57-60 призначені для ідентифікації ситуації "Перевищення температури обмоток ротора". Блок 57 обчислює поточне значення перевищення температури обмоток ротора, блок 58 забезпечує перевірку умови за результатами якої формується команда (блок 59) на відключення асинхронного двигуна від мережі та видається відповідне повідомлення на табло (блок 60). Обчислення значень перевищення температури обмоток ротора виконується за методикою. Значення температури обмоток ротора t 2 (T ) також обчислюється в усталеному режимі на кожному періоді C= 1 tr éæ L êç Ias m - dy ar êç tr dt ëè ö ÷÷ ø öæ d2 y ar dI ÷ç + R r ar ÷ç dt 2 dt øè (Т) зміни сигналів напруги та стр уму але без розділу температур за фазами на підставі виразу для електромагнітного моменту: M= 3I 2 R 2 2 sv 0 . (19) DP = 3I 2 R2 = M(v 0 - v ). 2 Звідки Після чого, для обчислення поточної температури застосовується рішення рівняння теплового балансу. Блоки 61-64 призначені для виконання прогнозу щодо подальшого нагріву обмоток ротора (блок 61) з обчисленням прогнозованого часу (блок 63) відключення асинхронного двигуна яке обчислюється залежно від виконання умови 62 за результатами якої формується та видається відповідне повідомлення на табло (блок 64). Прогноз нагріву обмоток статора та обчислення часу відключення асинхронного двигуна від мережі проводиться за методикою застосованою для обмоток статора. Блок 65 призначений для виконання гармонічного аналізу сигналів електромагнітного моменту M[j] та швидкості v [ j ] згідно алгоритму дискретного перетворення Фур'є. Блоки 66-68 призначені визначення "Природи вібрацій" на підставі порівняння гармонік електромагнітного моменту та швидкості (блок 66). За результатами порівняння формується та видається відповідне повідомлення на табло (блок 67 або блок 68). Блоки 70-72 призначені для ідентифікації ситуації "Перевищення динамічного навантаження на підшипники". Блок 70 обчислює поточне еквівалентне динамічне навантаження на підшипник (Рr), блок 71 забезпечує порівняння значень обчисленого еквівалентного динамічного навантаження з табличним значенням. Залежно від виконання умови (блок 61) на табло видається відповідне повідомлення (блок 72). Обчислення еквівалентного динамічного навантаження на підшипник обчислюється за наступним чином. Маючи дискретні значення електромагнітного моменту та знаючи зовнішній радіус ротора (r), обчислюється еквівалентне динамічне навантаження: (21) Pr = s[M] × r × k б × k т s[M] = 1 N å (M[ j] - M[M]) N де - середньоквадратичне значення моменту; M[j] - дискретні значення моменту; M[M] - математичне сподівання моменту M[j]. Блоки 73-74 призначені для обчислення уособленого коефіцієнту, який характеризує неякість перетворення енергії в двигуні (блок 73) та його виводу на табло (блок 74). Обчислення проводяться за формулою: P (20) e P = 0 100%, Pe P0 = 1 N å (U A [ j ]I A [ j ] + UB [ j]I B [ j] + UC [ j ]I C [ j ]), Pe = 1 N å (P [j]) 0 2 j j де - відповідно середнє значення потужності та еквівалентне значення потужності двигуна. Розшифровка повідомлень, що використовуються при описанні функціонального блоку прийняття рішення (фіг.2) та алгоритму обробки інформації: Номер повідомлення Повідомлення 1 Повідомлення 2 Повідомлення 3 Повідомлення 4 Повідомлення 5 Повідомлення 6 Повідомлення 7 Повідомлення 8 Повідомлення 9 Повідомлення 10 Повідомлення Повідомлення Повідомлення Повідомлення Повідомлення Повідомлення Повідомлення Повідомлення Повідомлення Повідомлення 11 12 13 14 15 16 17 18 19 20 Пояснення повідомлення «КЗ» «Пониження напруги» «Перевищення напруги» «Обрив фази мереженої напруги» «Коефіцієнт несиметрії фаз напруги вищий за межу допустимого» «Коефіцієнт несиметрії фаз напруги вищий за нормально допустимий» «Коефіцієнт несинусоїдальності фаз напруги вищий за межу допустимого» «Коефіцієнт несинусоїдальності фаз напруги вищий за нормально допустимий» «Коефіцієнт несинусоїдалності n-ої гармонійної складової фаз напруги вищий за межу допустимого» «Коефіцієнт несинусоїдалності n-ої гармонійної складової фаз напруги вищий за нормально допустимий» «Перевантаження по струму» «Несиметрія струмів у фазах статора» «Перевищення температури фази...обмотки статора» «Час відключення...по нагріву фази...обмотки статора» «Перевищення температури обмоток ротора» «Час відключення...по нагріву обмоток ротора» «Джерелом вібрацій є механіка двигуна» «Джерелом вібрацій є електромагнітні процеси» «Еквівалентне динамічне навантаження більше за допустиме» «Уособлений коефіцієнт перетворення енергії...»
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for protecting an asynchronous motor
Автори англійськоюRodkin Dmytro Yosypovych, Chornyi Oleksii Petrovych, Lashko Yurii Viktorovych
Назва патенту російськоюУстройство для защиты асинхронного электродвигателя
Автори російськоюРодькин Дмитрий Иосифович, Черный Алексей Петрович, Лашко Юрий Викторович
МПК / Мітки
МПК: H02P 29/04
Мітки: асинхронного, пристрій, захисту, двигуна
Код посилання
<a href="https://ua.patents.su/9-69523-pristrijj-zakhistu-asinkhronnogo-dviguna.html" target="_blank" rel="follow" title="База патентів України">Пристрій захисту асинхронного двигуна</a>
Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення
Номер патенту: 36060
Опубліковано: 16.04.2001
Автори: Пасмурских Олександр Олексійович, Родькін Дмитро Йосипович, Долженко Віктор Володимирович, Луговой Анатолій Васильович, Сисюк Геннадій Юрійович, Добрецов Володимир Валентинович, Вошун Олексій Миколайович, Чорний Олексій Петрович
МПК: G01R 31/34
Мітки: діагностики, асинхронного, двигуна, здійснення, ротором, параметрів, пристрій, короткозамкненим, спосіб
Формула / Реферат:
1. Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, в відключенні статорних обмоток від мережі в момент переходу струму через нуль, вимірюванні залишкової напруги після відключення, який відрізняється тим, що в момент відключення вимірюють стрибок напруги на затискачах статора...
Спосіб пуску асинхронного двигуна технологічного агрегату та пристрій для його реалізації
Номер патенту: 68479
Опубліковано: 16.08.2004
Автори: Кирічков Анатолій Васильович, Чорний Олексій Петрович, Гомілко Володимир Іванович, Родькін Дмитро Йосипович, Гладир Андрій Іванович, Лобанов Володимир Димитрович
МПК: G01R 31/34
Мітки: агрегату, двигуна, пуску, пристрій, спосіб, асинхронного, технологічного, реалізації
Формула / Реферат:
1. Спосіб пуску асинхронного двигуна, що включає підключення обмоток статора двигуна до трифазної мережі через тиристорний регулятор змінної напруги з системою імпульсно-фазового управління, збільшення напруги живлення на клемах двигуна у функції часу, який відрізняється тим, що процес пуску здійснюється шляхом зміни кута керування тиристорів до повного їх відкривання, вимірювання струму та напруги статора, обчислення ковзання та моменту при...
Пристрій для захисту трифазного асинхронного двигуна від обриву фази
Номер патенту: 3091
Опубліковано: 26.12.1994
Автор: Брусов Сергій Андрійович
МПК: H02H 7/09
Мітки: захисту, обриву, пристрій, асинхронного, трифазного, двигуна, фазі
Формула / Реферат:
Устройство для защиты трехфазного асинхронного двигателя от обрыва фазы, содержащее контактор подачи питания на двигатель, кнопки управления (включения и отключения) контактором и две обмотки реле. вывод одной обмотки подключен к 1-ой фазе, вывод второй обмотки подключен ко 2-ой фазе, а другие выводы обмоток подключены к 3-ей фазе, отличающееся тем, что обмотки выполнены одинаковыми и намотаны встречно одна другой на одном магнитопроводе...
Спосіб діагностики асинхронного двигуна та пристрій для його здійснення
Номер патенту: 50115
Опубліковано: 15.10.2002
Автори: Лашко Юрій Вікторович, Головко Олег Степанович, Гладир Андрій Іванович, Волощенко Олександр Михайлович, Чорний Олексій Петрович, Родькін Дмитро Йосипович
МПК: G01R 31/34
Мітки: діагностики, здійснення, спосіб, асинхронного, двигуна, пристрій
Формула / Реферат:
1. Спосіб діагностики асинхронного двигуна, який полягає в підключенні асинхронного двигуна через тиристорний регулятор до джерела промислової частоти та вимірюванні миттєвих значень напруги та струму статорного ланцюга, який відрізняється тим, що за даними вимірів розраховують миттєві значення електромагнітного моменту АД, за допомогою обчислювального блока також розраховують значення електромагнітного моменту АД за паспортними даними,...
Спосіб гальмування асинхронного двигуна та пристрій для його реалізації
Номер патенту: 62098
Опубліковано: 15.12.2003
Автори: Родькін Дмитро Йосипович, Огарь Олександр Сергійович, Чорний Олексій Петрович, Гладир Андрій Іванович
МПК: G01R 31/34
Мітки: гальмування, пристрій, реалізації, двигуна, асинхронного, спосіб
Формула / Реферат:
1. Спосіб гальмування асинхронного двигуна, що включає підключення асинхронного двигуна через тиристорний регулятор напруги із системою імпульсно-фазового керування до джерела промислової частоти, який відрізняється тим, що розраховують різницю між завданням і фактичною швидкістю обертання, сигнал похибки подають на генератор і формують вихідний сигнал на систему імпульсно-фазового керування у вигляді періодичного сигналу з частотою близько...
Попередній патент: Спосіб введення лікарських препаратів в ділянку гортані
Наступний патент: Літальний апарат
Випадковий патент: Контактно-поверхневий водонагрівач для локальної системи теплопостачання