Система відеоспостереження
Формула / Реферат
Корпус батареї для мобільного телефону, який містить з'єднані між собою панелі, що виконані з плоскими торцевою і бічними стінками, при цьому торцева і бічні стінки панелі з'єднані між собою або під прямим кутом, або під кутом більше чи менше 90°, або з плавним переходом від торцевої до бічних стінок, причому на одній з торцевих чи бічних стінок панелі виконані вирізи для контактів, а панелі виконані або з пластмаси, або з будь-якого-іншого матеріалу, що забезпечує працездатність батареї, який відрізняється тим, що на торцевій стінці однієї з панелі виконане поглиблення під адаптер для карти пам'яті, при цьому на стінках згаданого поглиблення виконані елементи фіксації адаптера у встановленому в поглибленні положенні, причому поглиблення під адаптер для карти пам'яті виконане в будь-якому з місць на поверхні торцевої стінки панелі, форма поглиблення відповідає формі згаданого адаптера, а величина стінки поглиблення - його товщині.
Текст
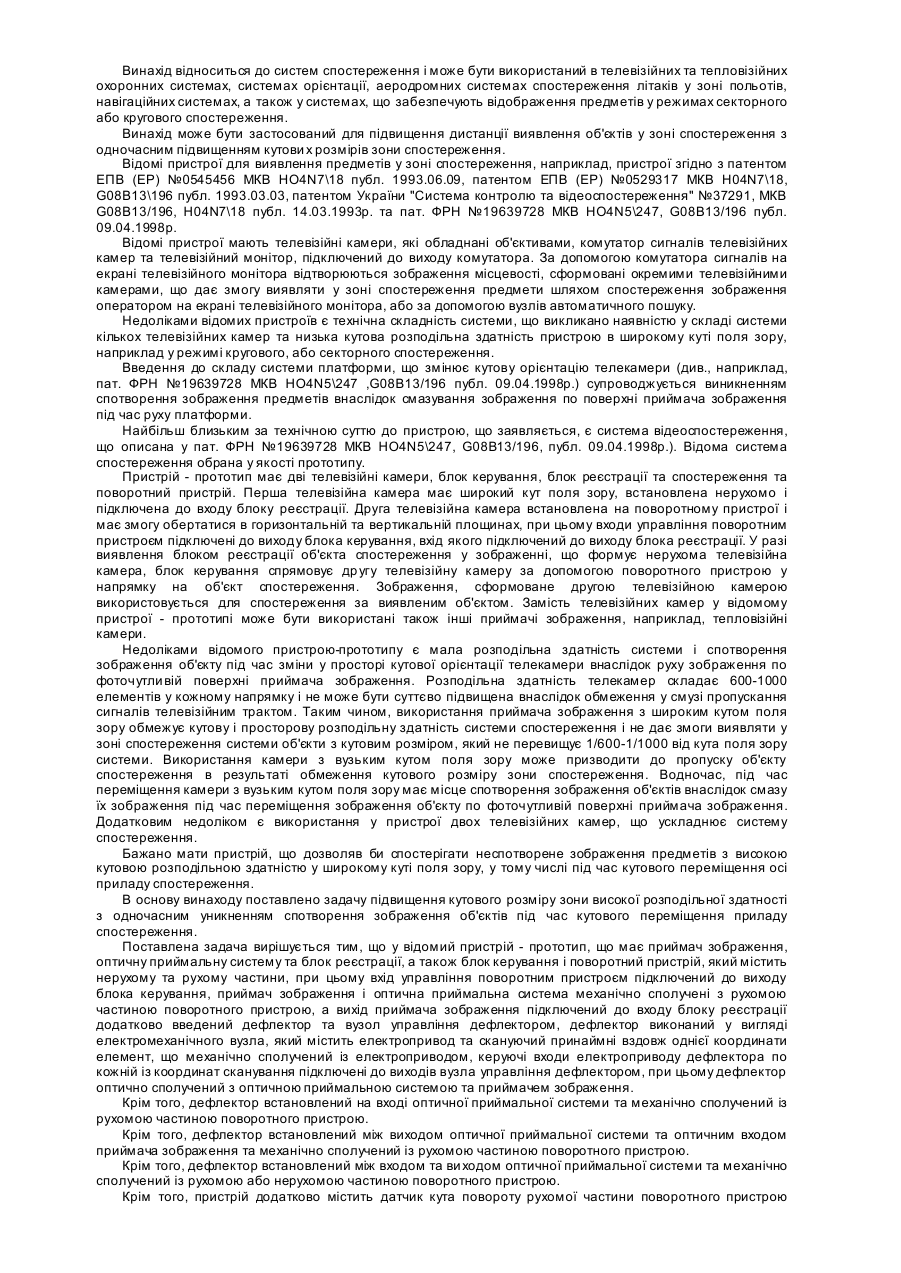
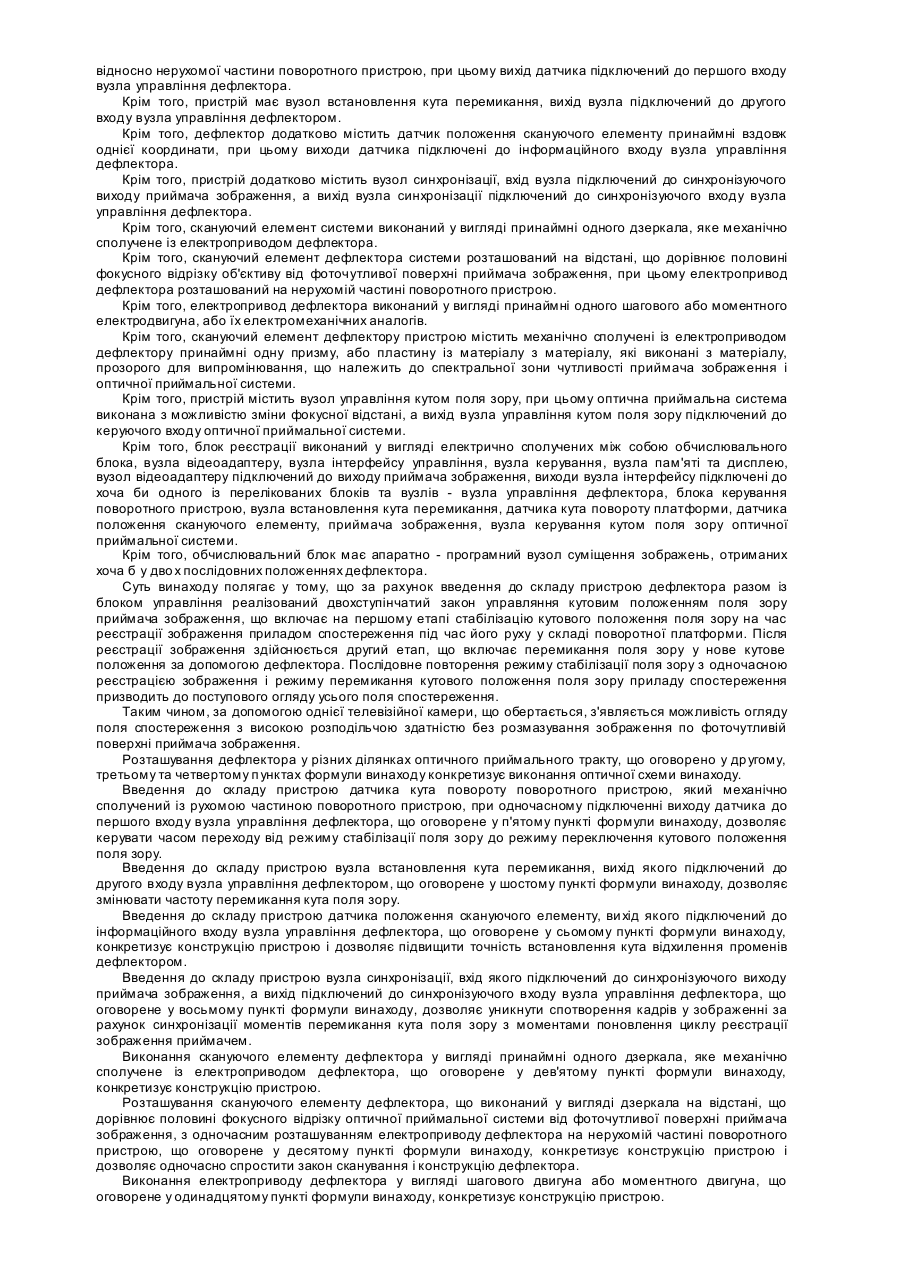
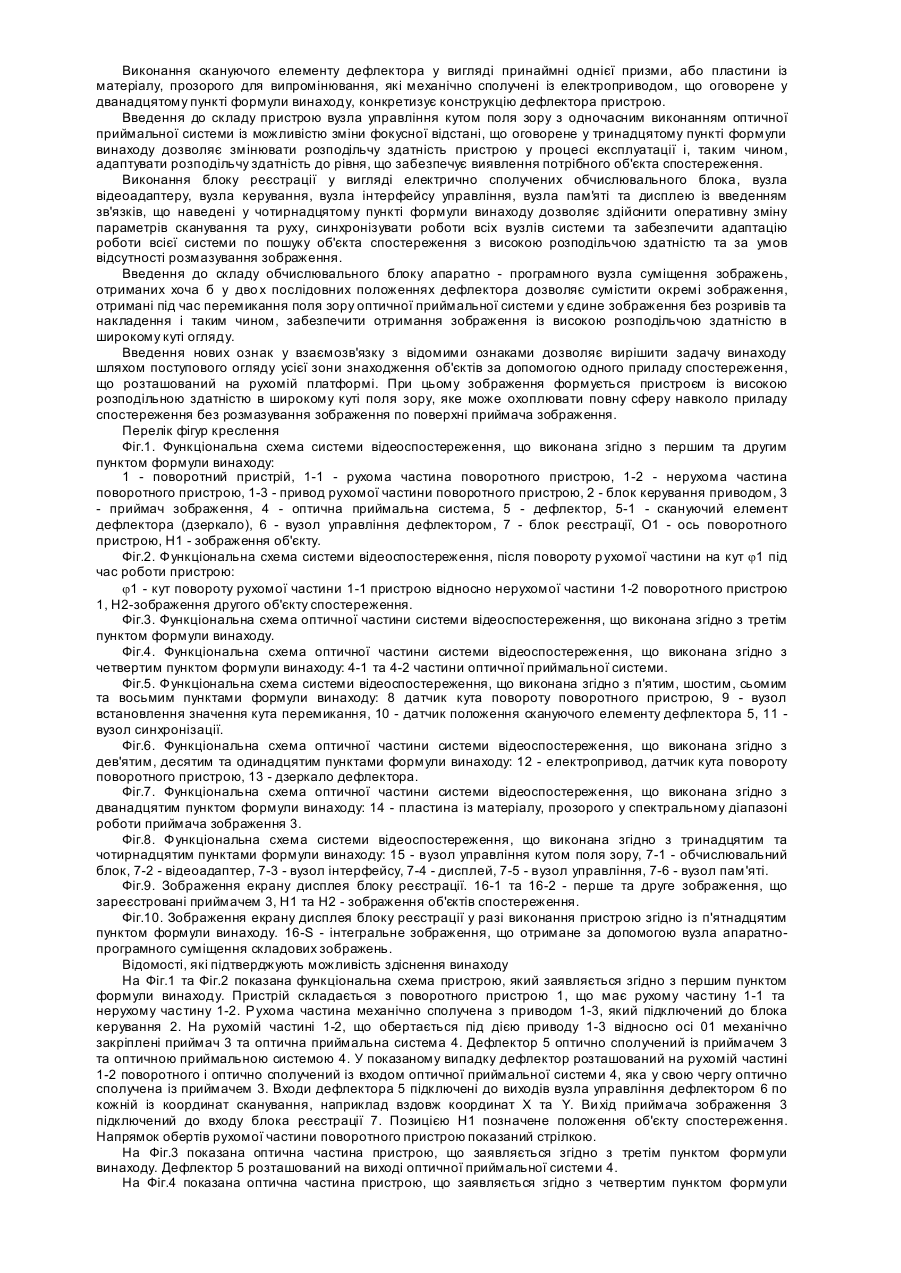
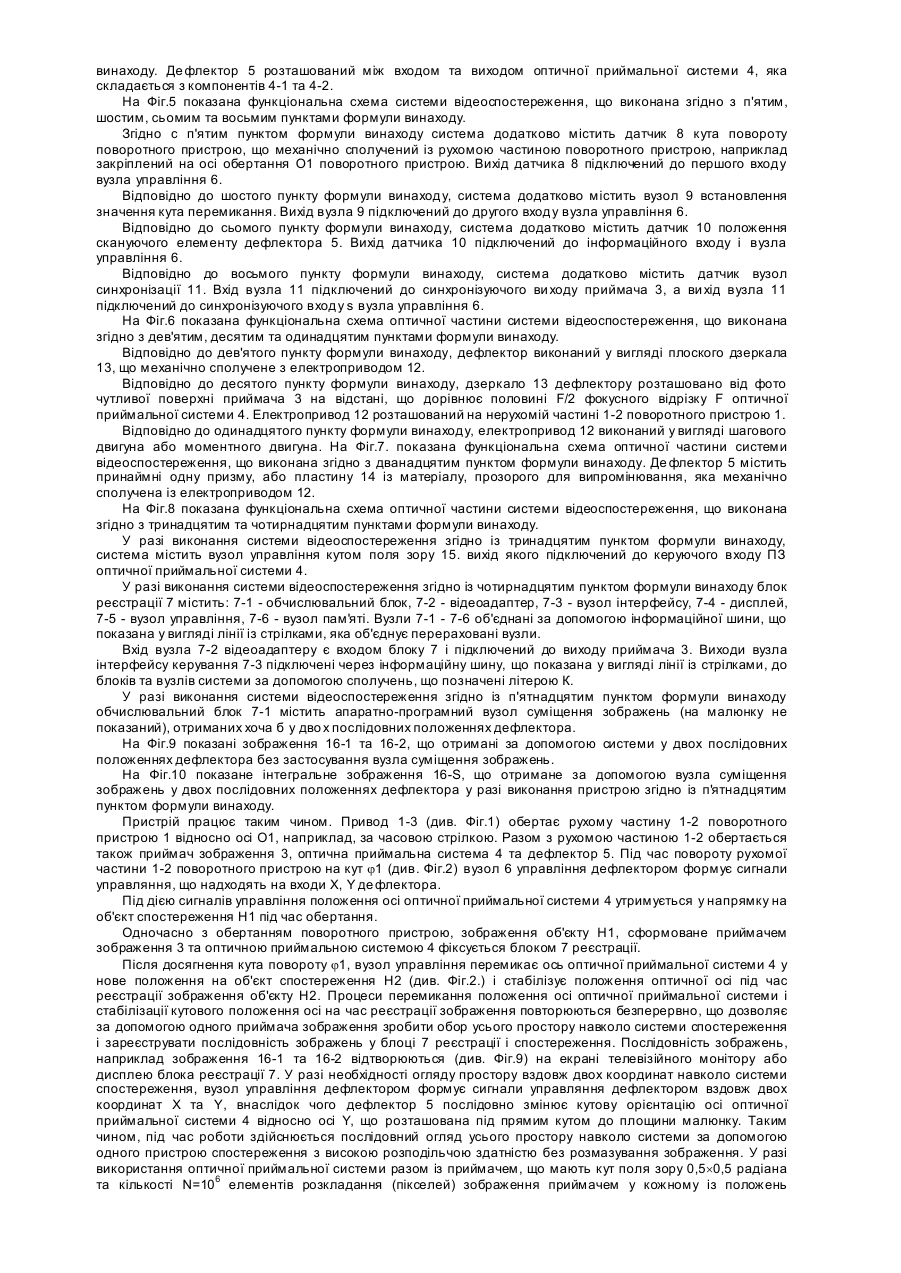
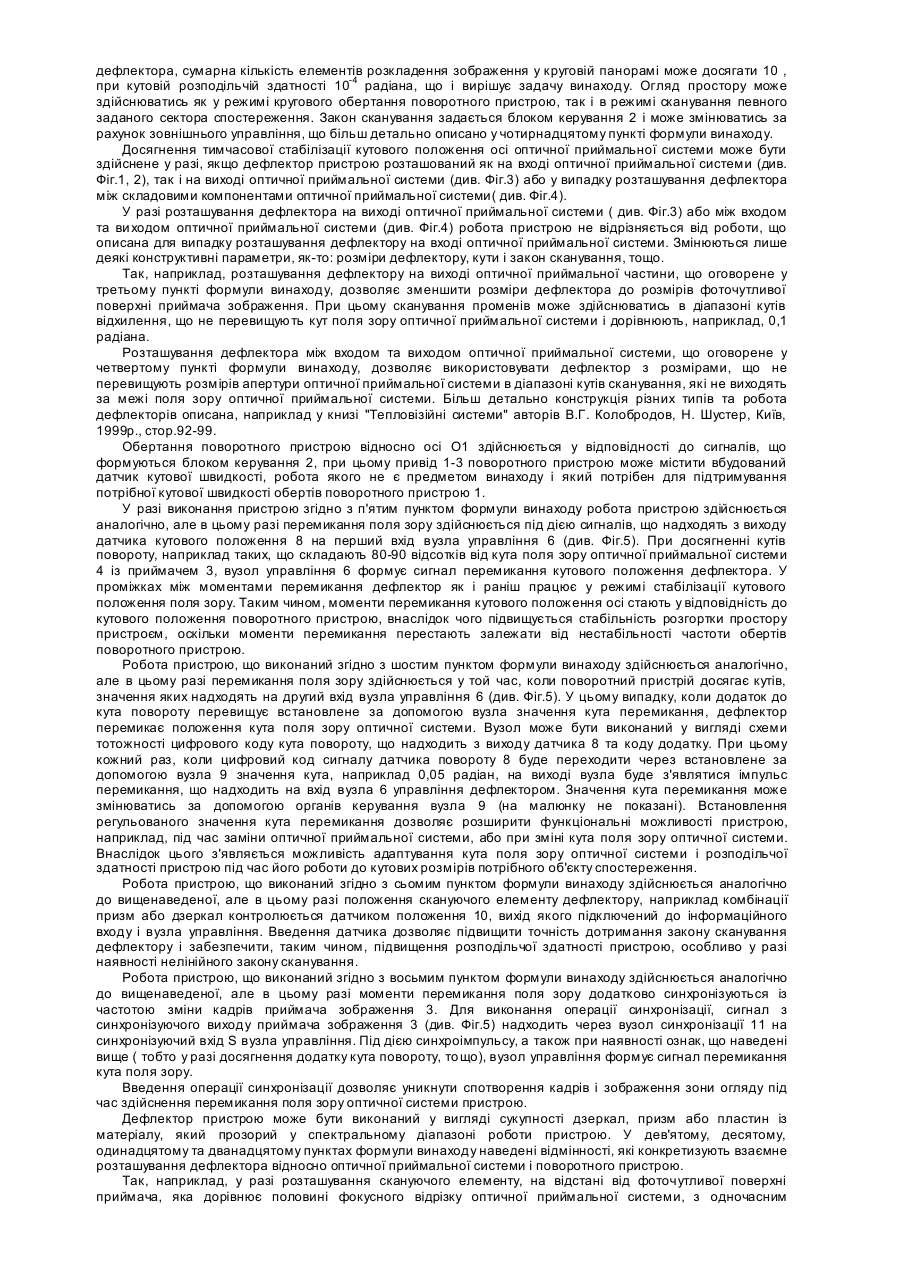
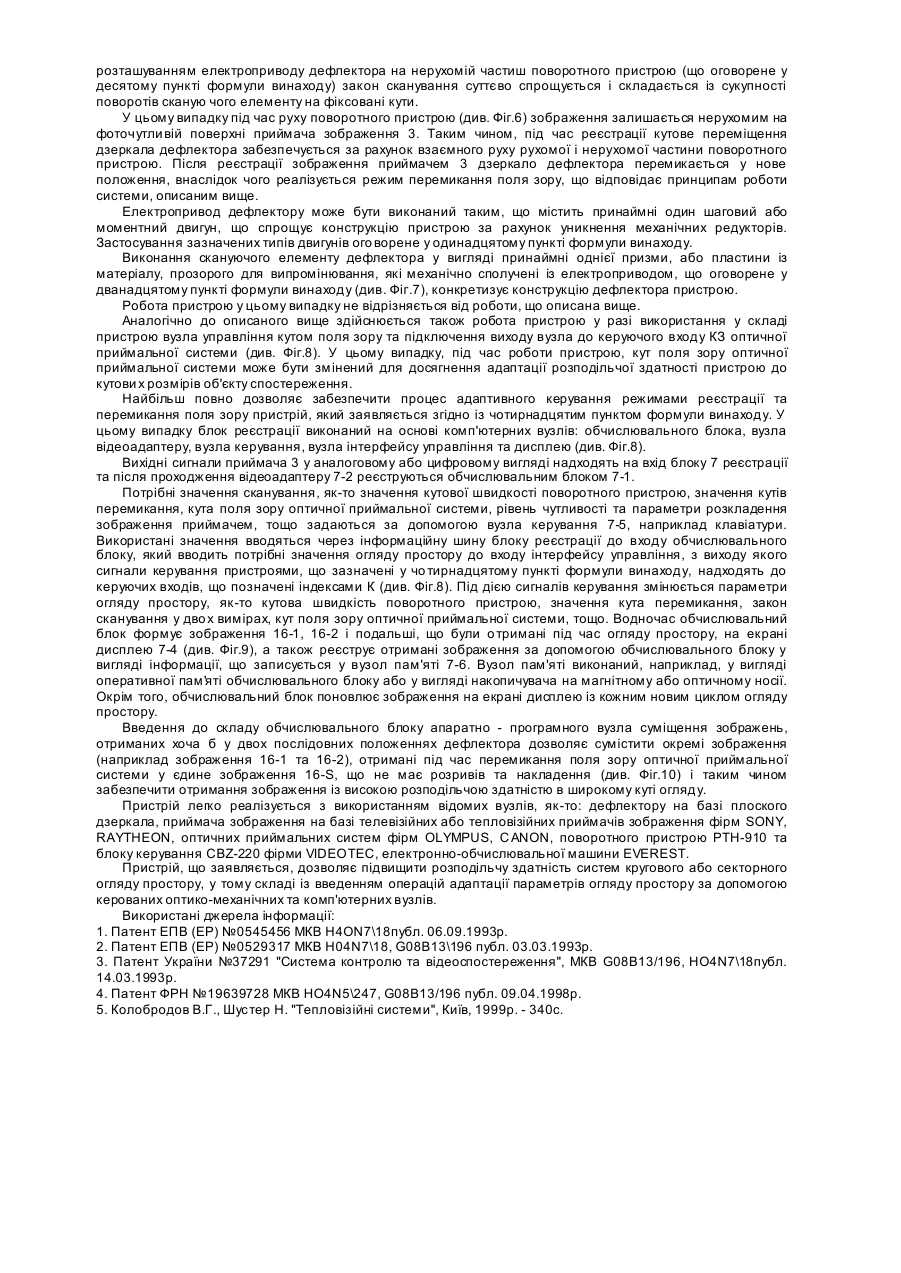
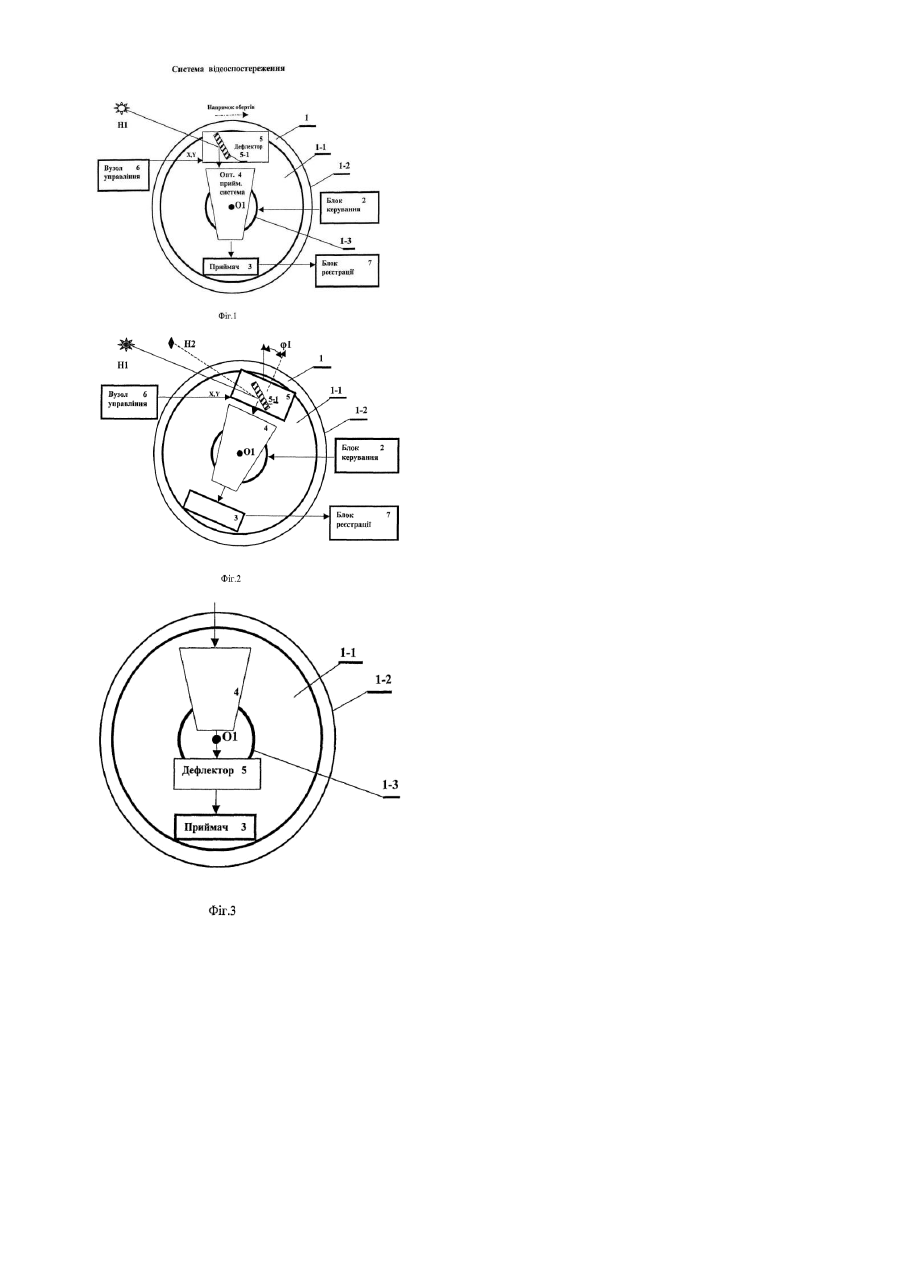
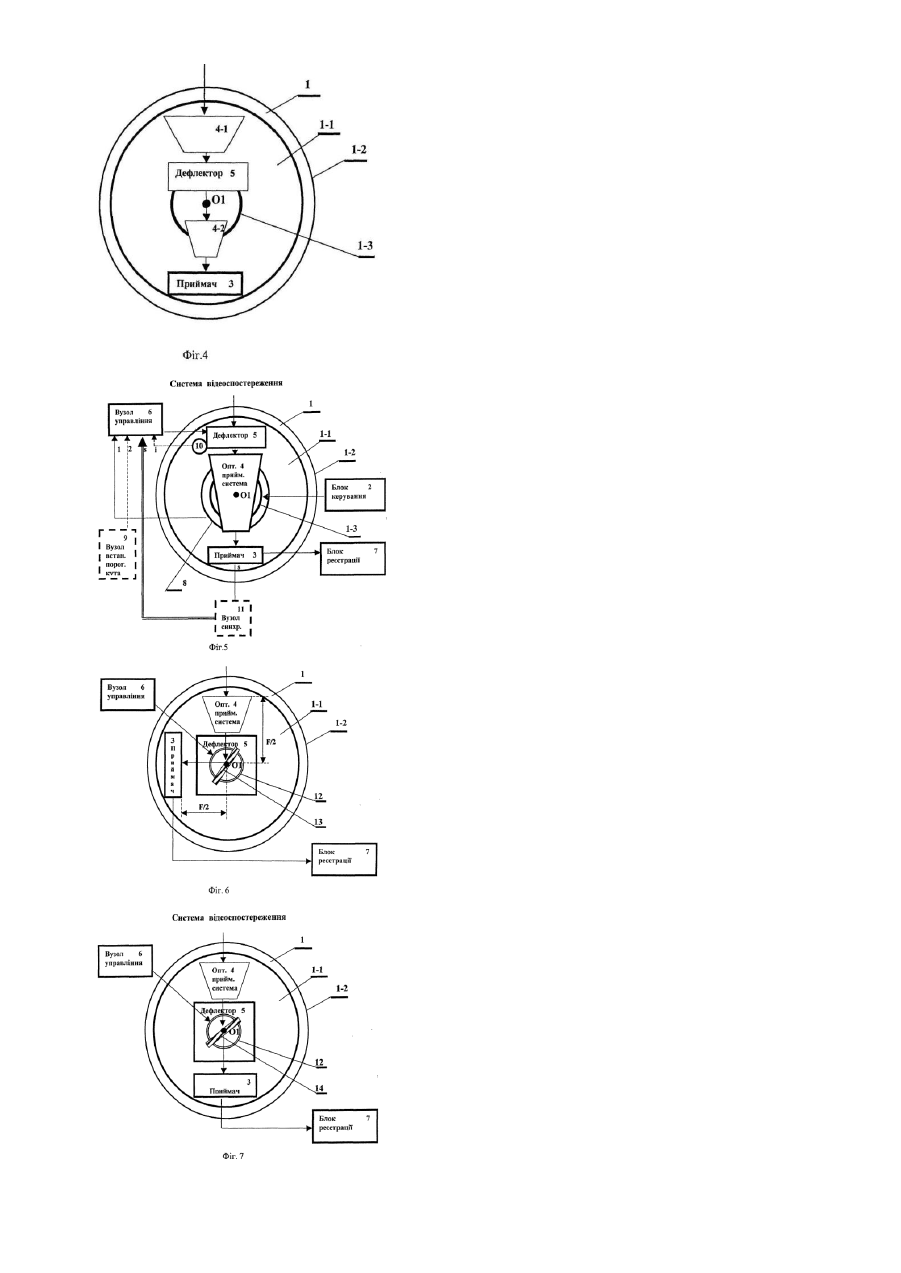
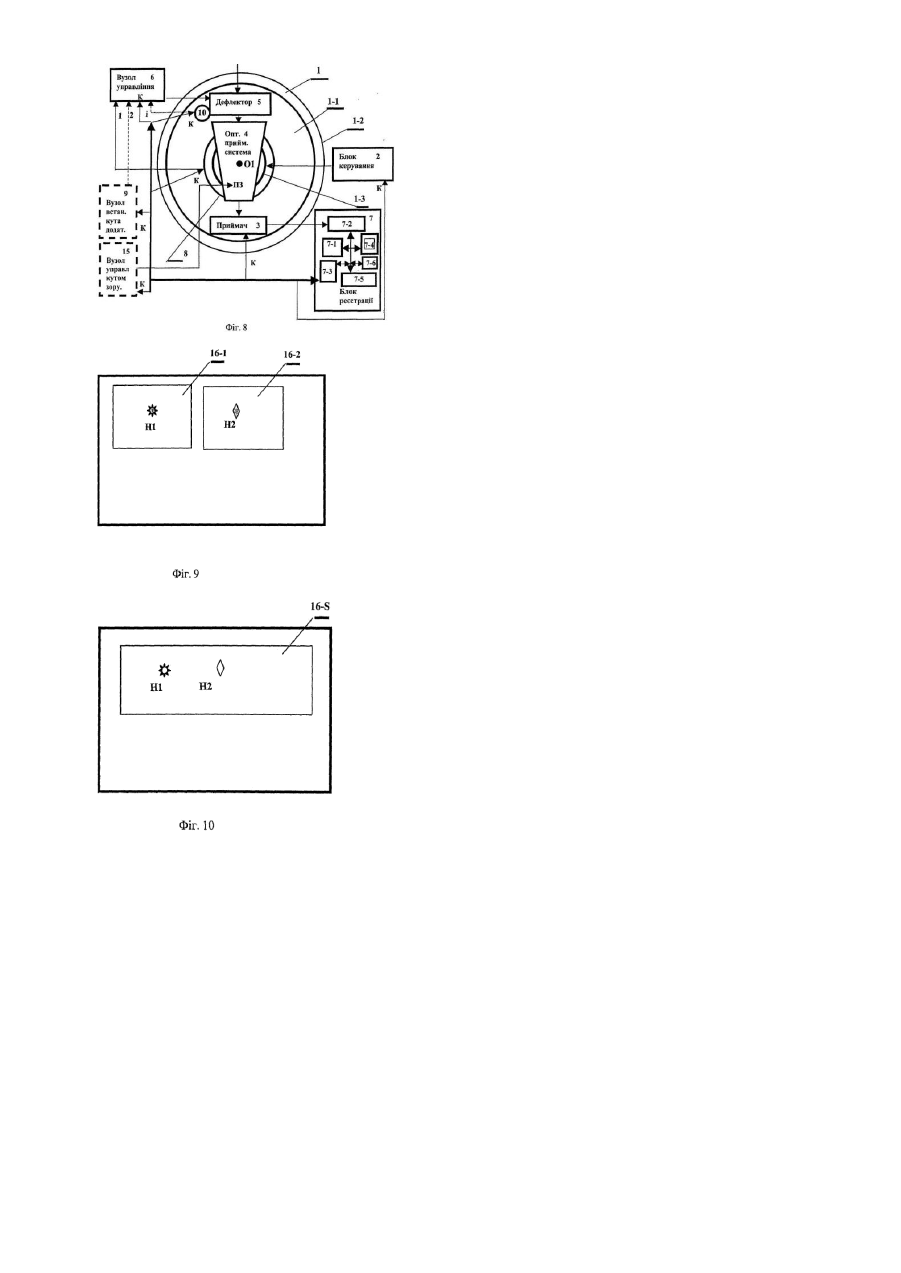
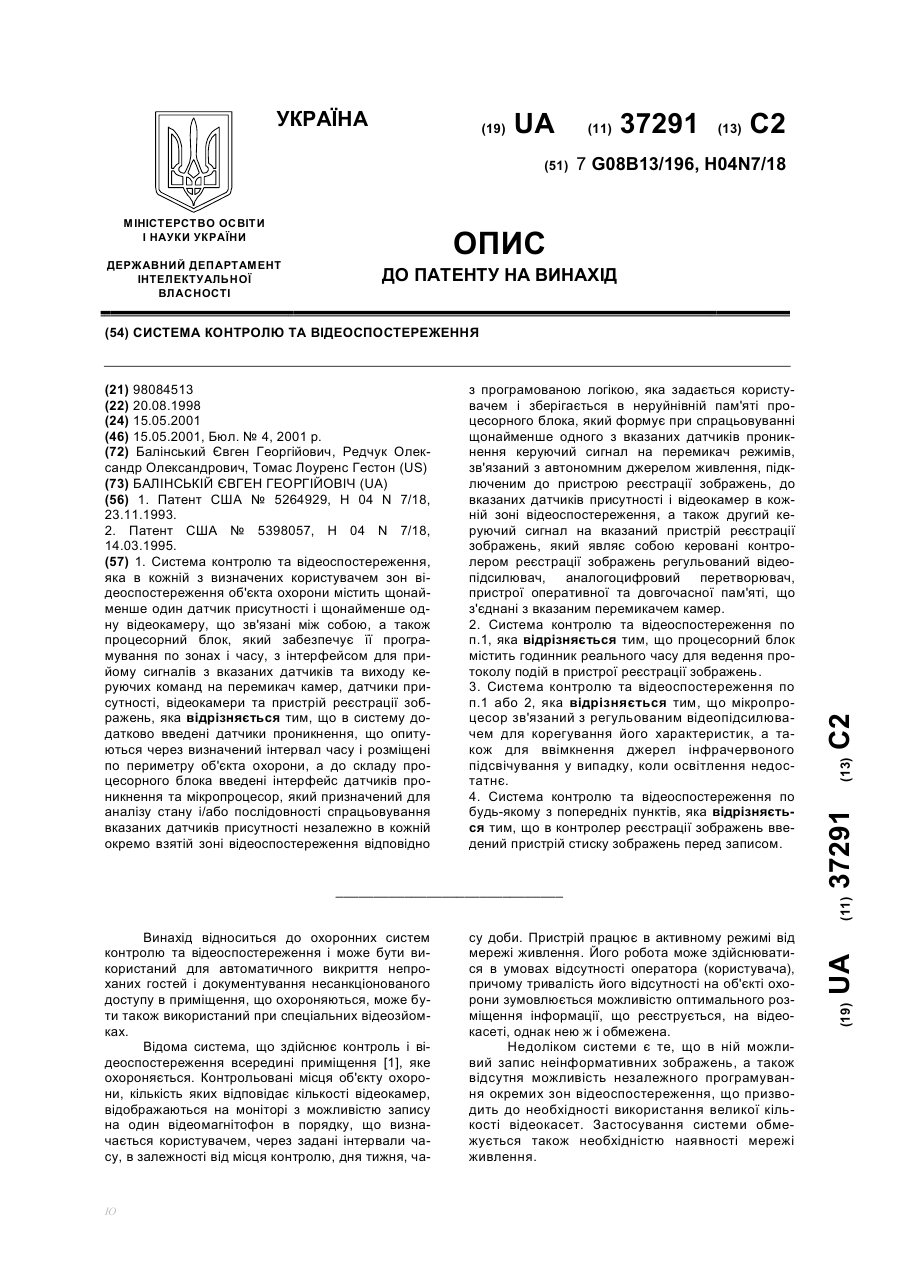
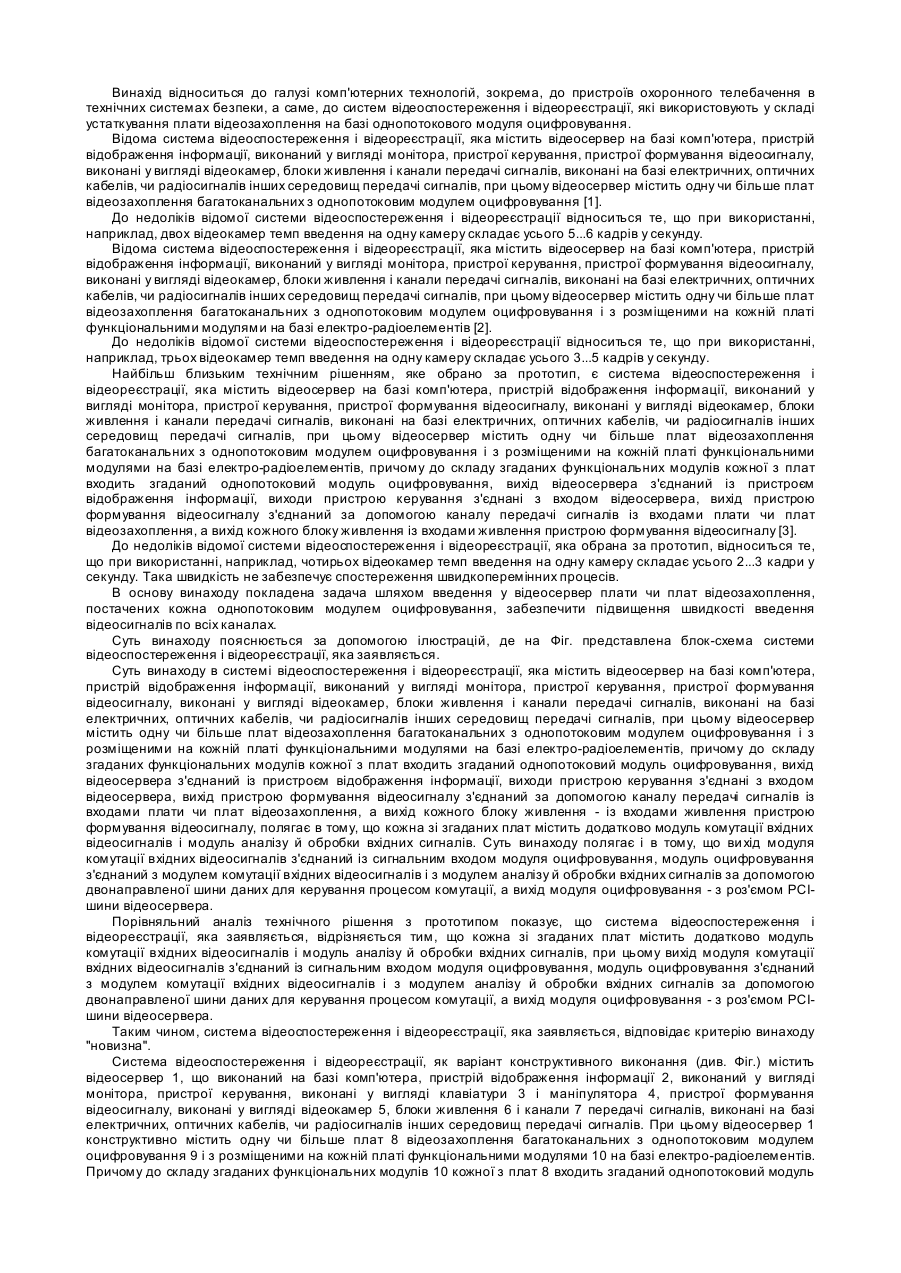
Винахід відноситься до систем спостереження і може бути використаний в телевізійних та тепловізійних охоронних системах, системах орієнтації, аеродромних системах спостереження літаків у зоні польотів, навігаційних системах, а також у системах, що забезпечують відображення предметів у режимах секторного або кругового спостереження. Винахід може бути застосований для підвищення дистанції виявлення об'єктів у зоні спостереження з одночасним підвищенням кутови х розмірів зони спостереження. Відомі пристрої для виявлення предметів у зоні спостереження, наприклад, пристрої згідно з патентом ЕПВ (ЕР) №0545456 МКВ HО4N7\18 публ. 1993.06.09, патентом ЕПВ (ЕР) №0529317 МКВ H04N7\18, G08B13\196 публ. 1993.03.03, патентом України "Система контролю та відеоспостереження" №37291, МКВ G08B13/196, H04N7\18 публ. 14.03.1993р. та пат. ФРН №19639728 МКВ HО4N5\247, G08B13/196 публ. 09.04.1998р. Відомі пристрої мають телевізійні камери, які обладнані об'єктивами, комутатор сигналів телевізійних камер та телевізійний монітор, підключений до виходу комутатора. За допомогою комутатора сигналів на екрані телевізійного монітора відтворюються зображення місцевості, сформовані окремими телевізійними камерами, що дає змогу виявляти у зоні спостереження предмети шляхом спостереження зображення оператором на екрані телевізійного монітора, або за допомогою вузлів автоматичного пошуку. Недоліками відомих пристроїв є технічна складність системи, що викликано наявністю у складі системи кількох телевізійних камер та низька кутова розподільна здатність пристрою в широкому куті поля зору, наприклад у режимі кругового, або секторного спостереження. Введення до складу системи платформи, що змінює кутову орієнтацію телекамери (див., наприклад, пат. ФРН №19639728 МКВ HО4N5\247 ,G08B13/196 публ. 09.04.1998р.) супроводжується виникненням спотворення зображення предметів внаслідок смазування зображення по поверхні приймача зображення під час руху платформи. Найбільш близьким за технічною суттю до пристрою, що заявляється, є система відеоспостереження, що описана у пат. ФРН №19639728 МКВ HО4N5\247, G08B13/196, публ. 09.04.1998р.). Відома система спостереження обрана у якості прототипу. Пристрій - прототип має дві телевізійні камери, блок керування, блок реєстрації та спостереження та поворотний пристрій. Перша телевізійна камера має широкий кут поля зору, встановлена нерухомо і підключена до входу блоку реєстрації. Друга телевізійна камера встановлена на поворотному пристрої і має змогу обертатися в горизонтальній та вертикальній площинах, при цьому входи управління поворотним пристроєм підключені до виходу блока керування, вхід якого підключений до виходу блока реєстрації. У разі виявлення блоком реєстрації об'єкта спостереження у зображенні, що формує нерухома телевізійна камера, блок керування спрямовує др угу телевізійну камеру за допомогою поворотного пристрою у напрямку на об'єкт спостереження. Зображення, сформоване другою телевізійною камерою використовується для спостереження за виявленим об'єктом. Замість телевізійних камер у відомому пристрої - прототипі може бути використані також інші приймачі зображення, наприклад, тепловізійні камери. Недоліками відомого пристрою-прототипу є мала розподільна здатність системи і спотворення зображення об'єкту під час зміни у просторі кутової орієнтації телекамери внаслідок руху зображення по фоточутли вій поверхні приймача зображення. Розподільна здатність телекамер складає 600-1000 елементів у кожному напрямку і не може бути суттєво підвищена внаслідок обмеження у смузі пропускання сигналів телевізійним трактом. Таким чином, використання приймача зображення з широким кутом поля зору обмежує кутову і просторову розподільну здатність системи спостереження і не дає змоги виявляти у зоні спостереження системи об'єкти з кутовим розміром, який не перевищує 1/600-1/1000 від кута поля зору системи. Використання камери з вузьким кутом поля зору може призводити до пропуску об'єкту спостереження в результаті обмеження кутового розміру зони спостереження. Водночас, під час переміщення камери з вузьким кутом поля зору має місце спотворення зображення об'єктів внаслідок смазу їх зображення під час переміщення зображення об'єкту по фоточутливій поверхні приймача зображення. Додатковим недоліком є використання у пристрої двох телевізійних камер, що ускладнює систему спостереження. Бажано мати пристрій, що дозволяв би спостерігати неспотворене зображення предметів з високою кутовою розподільною здатністю у широкому куті поля зору, у тому числі під час кутового переміщення осі приладу спостереження. В основу винаходу поставлено задачу підвищення кутового розміру зони високої розподільної здатності з одночасним уникненням спотворення зображення об'єктів під час кутового переміщення приладу спостереження. Поставлена задача вирішується тим, що у відомий пристрій - прототип, що має приймач зображення, оптичну приймальну систему та блок реєстрації, а також блок керування і поворотний пристрій, який містить нерухому та рухому частини, при цьому вхід управління поворотним пристроєм підключений до виходу блока керування, приймач зображення і оптична приймальна система механічно сполучені з рухомою частиною поворотного пристрою, а вихід приймача зображення підключений до входу блоку реєстрації додатково введений дефлектор та вузол управління дефлектором, дефлектор виконаний у вигляді електромеханічного вузла, який містить електропривод та скануючий принаймні вздовж однієї координати елемент, що механічно сполучений із електроприводом, керуючі входи електроприводу дефлектора по кожній із координат сканування підключені до виходів вузла управління дефлектором, при цьому дефлектор оптично сполучений з оптичною приймальною системою та приймачем зображення. Крім того, дефлектор встановлений на вході оптичної приймальної системи та механічно сполучений із рухомою частиною поворотного пристрою. Крім того, дефлектор встановлений між виходом оптичної приймальної системи та оптичним входом приймача зображення та механічно сполучений із рухомою частиною поворотного пристрою. Крім того, дефлектор встановлений між входом та ви ходом оптичної приймальної системи та механічно сполучений із рухомою або нерухомою частиною поворотного пристрою. Крім того, пристрій додатково містить датчик кута повороту рухомої частини поворотного пристрою відносно нерухомої частини поворотного пристрою, при цьому вихід датчика підключений до першого входу вузла управління дефлектора. Крім того, пристрій має вузол встановлення кута перемикання, вихід вузла підключений до другого входу вузла управління дефлектором. Крім того, дефлектор додатково містить датчик положення скануючого елементу принаймні вздовж однієї координати, при цьому виходи датчика підключені до інформаційного входу вузла управління дефлектора. Крім того, пристрій додатково містить вузол синхронізації, вхід вузла підключений до синхронізуючого виходу приймача зображення, а вихід вузла синхронізації підключений до синхронізуючого входу вузла управління дефлектора. Крім того, скануючий елемент системи виконаний у вигляді принаймні одного дзеркала, яке механічно сполучене із електроприводом дефлектора. Крім того, скануючий елемент дефлектора системи розташований на відстані, що дорівнює половині фокусного відрізку об'єктиву від фоточутливої поверхні приймача зображення, при цьому електропривод дефлектора розташований на нерухомій частині поворотного пристрою. Крім того, електропривод дефлектора виконаний у вигляді принаймні одного шагового або моментного електродвигуна, або їх електромеханічних аналогів. Крім того, скануючий елемент дефлектору пристрою містить механічно сполучені із електроприводом дефлектору принаймні одну призму, або пластину із матеріалу з матеріалу, які виконані з матеріалу, прозорого для випромінювання, що належить до спектральної зони чутливості приймача зображення і оптичної приймальної системи. Крім того, пристрій містить вузол управління кутом поля зору, при цьому оптична приймальна система виконана з можливістю зміни фокусної відстані, а вихід вузла управління кутом поля зору підключений до керуючого входу оптичної приймальної системи. Крім того, блок реєстрації виконаний у вигляді електрично сполучених між собою обчислювального блока, вузла відеоадаптеру, вузла інтерфейсу управління, вузла керування, вузла пам'яті та дисплею, вузол відеоадаптеру підключений до виходу приймача зображення, виходи вузла інтерфейсу підключені до хоча би одного із перелікованих блоків та вузлів - вузла управління дефлектора, блока керування поворотного пристрою, вузла встановлення кута перемикання, датчика кута повороту платформи, датчика положення скануючого елементу, приймача зображення, вузла керування кутом поля зору оптичної приймальної системи. Крім того, обчислювальний блок має апаратно - програмний вузол суміщення зображень, отриманих хоча б у дво х послідовних положеннях дефлектора. Суть винаходу полягає у тому, що за рахунок введення до складу пристрою дефлектора разом із блоком управління реалізований двохступінчатий закон управляння кутовим положенням поля зору приймача зображення, що включає на першому етапі стабілізацію кутового положення поля зору на час реєстрації зображення приладом спостереження під час його руху у складі поворотної платформи. Після реєстрації зображення здійснюється другий етап, що включає перемикання поля зору у нове кутове положення за допомогою дефлектора. Послідовне повторення режиму стабілізації поля зору з одночасною реєстрацією зображення і режиму перемикання кутового положення поля зору приладу спостереження призводить до поступового огляду усього поля спостереження. Таким чином, за допомогою однієї телевізійної камери, що обертається, з'являється можливість огляду поля спостереження з високою розподільчою здатністю без розмазування зображення по фоточутливій поверхні приймача зображення. Розташування дефлектора у різних ділянках оптичного приймального тракту, що оговорено у др угому, третьому та четвертому п унктах формули винаходу конкретизує виконання оптичної схеми винаходу. Введення до складу пристрою датчика кута повороту поворотного пристрою, який механічно сполучений із рухомою частиною поворотного пристрою, при одночасному підключенні виходу датчика до першого входу вузла управління дефлектора, що оговорене у п'ятому пункті формули винаходу, дозволяє керувати часом переходу від режиму стабілізації поля зору до режиму переключення кутового положення поля зору. Введення до складу пристрою вузла встановлення кута перемикання, вихід якого підключений до другого входу вузла управління дефлектором, що оговорене у шостому пункті формули винаходу, дозволяє змінювати частоту перемикання кута поля зору. Введення до складу пристрою датчика положення скануючого елементу, ви хід якого підключений до інформаційного входу вузла управління дефлектора, що оговорене у сьомому пункті формули винаходу, конкретизує конструкцію пристрою і дозволяє підвищити точність встановлення кута відхилення променів дефлектором. Введення до складу пристрою вузла синхронізації, вхід якого підключений до синхронізуючого виходу приймача зображення, а вихід підключений до синхронізуючого входу вузла управління дефлектора, що оговорене у восьмому пункті формули винаходу, дозволяє уникнути спотворення кадрів у зображенні за рахунок синхронізації моментів перемикання кута поля зору з моментами поновлення циклу реєстрації зображення приймачем. Виконання скануючого елементу дефлектора у вигляді принаймні одного дзеркала, яке механічно сполучене із електроприводом дефлектора, що оговорене у дев'ятому пункті формули винаходу, конкретизує конструкцію пристрою. Розташування скануючого елементу дефлектора, що виконаний у вигляді дзеркала на відстані, що дорівнює половині фокусного відрізку оптичної приймальної системи від фоточутливої поверхні приймача зображення, з одночасним розташуванням електроприводу дефлектора на нерухомій частині поворотного пристрою, що оговорене у десятому пункті формули винаходу, конкретизує конструкцію пристрою і дозволяє одночасно спростити закон сканування і конструкцію дефлектора. Виконання електроприводу дефлектора у вигляді шагового двигуна або моментного двигуна, що оговорене у одинадцятому пункті формули винаходу, конкретизує конструкцію пристрою. Виконання скануючого елементу дефлектора у вигляді принаймні однієї призми, або пластини із матеріалу, прозорого для випромінювання, які механічно сполучені із електроприводом, що оговорене у дванадцятому пункті формули винаходу, конкретизує конструкцію дефлектора пристрою. Введення до складу пристрою вузла управління кутом поля зору з одночасним виконанням оптичної приймальної системи із можливістю зміни фокусної відстані, що оговорене у тринадцятому пункті формули винаходу дозволяє змінювати розподільчу здатність пристрою у процесі експлуатації і, таким чином, адаптувати розподільчу здатність до рівня, що забезпечує виявлення потрібного об'єкта спостереження. Виконання блоку реєстрації у вигляді електрично сполучених обчислювального блока, вузла відеоадаптеру, вузла керування, вузла інтерфейсу управління, вузла пам'яті та дисплею із введенням зв'язків, що наведені у чотирнадцятому пункті формули винаходу дозволяє здійснити оперативну зміну параметрів сканування та руху, синхронізувати роботи всіх вузлів системи та забезпечити адаптацію роботи всієї системи по пошуку об'єкта спостереження з високою розподільчою здатністю та за умов відсутності розмазування зображення. Введення до складу обчислювального блоку апаратно - програмного вузла суміщення зображень, отриманих хоча б у дво х послідовних положеннях дефлектора дозволяє сумістити окремі зображення, отримані під час перемикання поля зору оптичної приймальної системи у єдине зображення без розривів та накладення і таким чином, забезпечити отримання зображення із високою розподільчою здатністю в широкому куті огляду. Введення нових ознак у взаємозв'язку з відомими ознаками дозволяє вирішити задачу винаходу шляхом поступового огляду усієї зони знаходження об'єктів за допомогою одного приладу спостереження, що розташований на рухомій платформі. При цьому зображення формується пристроєм із високою розподільною здатністю в широкому куті поля зору, яке може охоплювати повну сферу навколо приладу спостереження без розмазування зображення по поверхні приймача зображення. Перелік фігур креслення Фіг.1. Функціональна схема системи відеоспостереження, що виконана згідно з першим та другим пунктом формули винаходу: 1 - поворотний пристрій, 1-1 - рухома частина поворотного пристрою, 1-2 - нерухома частина поворотного пристрою, 1-3 - привод рухомої частини поворотного пристрою, 2 - блок керування приводом, 3 - приймач зображення, 4 - оптична приймальна система, 5 - дефлектор, 5-1 - скануючий елемент дефлектора (дзеркало), 6 - вузол управління дефлектором, 7 - блок реєстрації, О1 - ось поворотного пристрою, Н1 - зображення об'єкту. Фіг.2. Функціональна схема системи відеоспостереження, після повороту р ухомої частини на кут j1 під час роботи пристрою: j1 - кут повороту рухомої частини 1-1 пристрою відносно нерухомої частини 1-2 поворотного пристрою 1, Н2-зображення другого об'єкту спостереження. Фіг.3. Функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з третім пунктом формули винаходу. Фіг.4. Функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з четвертим пунктом формули винаходу: 4-1 та 4-2 частини оптичної приймальної системи. Фіг.5. Функціональна схема системи відеоспостереження, що виконана згідно з п'ятим, шостим, сьомим та восьмим пунктами формули винаходу: 8 датчик кута повороту поворотного пристрою, 9 - вузол встановлення значення кута перемикання, 10 - датчик положення скануючого елементу дефлектора 5, 11 вузол синхронізації. Фіг.6. Функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з дев'ятим, десятим та одинадцятим пунктами формули винаходу: 12 - електропривод, датчик кута повороту поворотного пристрою, 13 - дзеркало дефлектора. Фіг.7. Функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з дванадцятим пунктом формули винаходу: 14 - пластина із матеріалу, прозорого у спектральному діапазоні роботи приймача зображення 3. Фіг.8. Функціональна схема системи відеоспостереження, що виконана згідно з тринадцятим та чотирнадцятим пунктами формули винаходу: 15 - вузол управління кутом поля зору, 7-1 - обчислювальний блок, 7-2 - відеоадаптер, 7-3 - вузол інтерфейсу, 7-4 - дисплей, 7-5 - вузол управління, 7-6 - вузол пам'яті. Фіг.9. Зображення екрану дисплея блоку реєстрації. 16-1 та 16-2 - перше та друге зображення, що зареєстровані приймачем 3, Н1 та Н2 - зображення об'єктів спостереження. Фіг.10. Зображення екрану дисплея блоку реєстрації у разі виконання пристрою згідно із п'ятнадцятим пунктом формули винаходу. 16-S - інтегральне зображення, що отримане за допомогою вузла апаратнопрограмного суміщення складових зображень. Відомості, які підтверджують можливість здіснення винаходу На Фіг.1 та Фіг.2 показана функціональна схема пристрою, який заявляється згідно з першим пунктом формули винаходу. Пристрій складається з поворотного пристрою 1, що має рухому частину 1-1 та нерухому частину 1-2. Рухома частина механічно сполучена з приводом 1-3, який підключений до блока керування 2. На рухомій частині 1-2, що обертається під дією приводу 1-3 відносно осі 01 механічно закріплені приймач 3 та оптична приймальна система 4. Дефлектор 5 оптично сполучений із приймачем 3 та оптичною приймальною системою 4. У показаному випадку дефлектор розташований на рухомій частині 1-2 поворотного і оптично сполучений із входом оптичної приймальної системи 4, яка у свою чергу оптично сполучена із приймачем 3. Входи дефлектора 5 підключені до виходів вузла управління дефлектором 6 по кожній із координат сканування, наприклад вздовж координат X та Y. Ви хід приймача зображення 3 підключений до входу блока реєстрації 7. Позицією Н1 позначене положення об'єкту спостереження. Напрямок обертів рухомої частини поворотного пристрою показаний стрілкою. На Фіг.3 показана оптична частина пристрою, що заявляється згідно з третім пунктом формули винаходу. Дефлектор 5 розташований на виході оптичної приймальної системи 4. На Фіг.4 показана оптична частина пристрою, що заявляється згідно з четвертим пунктом формули винаходу. Де флектор 5 розташований між входом та виходом оптичної приймальної системи 4, яка складається з компонентів 4-1 та 4-2. На Фіг.5 показана функціональна схема системи відеоспостереження, що виконана згідно з п'ятим, шостим, сьомим та восьмим пунктами формули винаходу. Згідно с п'ятим пунктом формули винаходу система додатково містить датчик 8 кута повороту поворотного пристрою, що механічно сполучений із рухомою частиною поворотного пристрою, наприклад закріплений на осі обертання О1 поворотного пристрою. Вихід датчика 8 підключений до першого входу вузла управління 6. Відповідно до шостого пункту формули винаходу, система додатково містить вузол 9 встановлення значення кута перемикання. Вихід вузла 9 підключений до другого входу вузла управління 6. Відповідно до сьомого пункту формули винаходу, система додатково містить датчик 10 положення скануючого елементу дефлектора 5. Вихід датчика 10 підключений до інформаційного входу і вузла управління 6. Відповідно до восьмого пункту формули винаходу, система додатково містить датчик вузол синхронізації 11. Вхід вузла 11 підключений до синхронізуючого ви ходу приймача 3, а ви хід вузла 11 підключений до синхронізуючого входу s вузла управління 6. На Фіг.6 показана функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з дев'ятим, десятим та одинадцятим пунктами формули винаходу. Відповідно до дев'ятого пункту формули винаходу, дефлектор виконаний у вигляді плоского дзеркала 13, що механічно сполучене з електроприводом 12. Відповідно до десятого пункту формули винаходу, дзеркало 13 дефлектору розташовано від фото чутливої поверхні приймача 3 на відстані, що дорівнює половині F/2 фокусного відрізку F оптичної приймальної системи 4. Електропривод 12 розташований на нерухомій частині 1-2 поворотного пристрою 1. Відповідно до одинадцятого пункту формули винаходу, електропривод 12 виконаний у вигляді шагового двигуна або моментного двигуна. На Фіг.7. показана функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з дванадцятим пунктом формули винаходу. Де флектор 5 містить принаймні одну призму, або пластину 14 із матеріалу, прозорого для випромінювання, яка механічно сполучена із електроприводом 12. На Фіг.8 показана функціональна схема оптичної частини системи відеоспостереження, що виконана згідно з тринадцятим та чотирнадцятим пунктами формули винаходу. У разі виконання системи відеоспостереження згідно із тринадцятим пунктом формули винаходу, система містить вузол управління кутом поля зору 15. вихід якого підключений до керуючого входу ПЗ оптичної приймальної системи 4. У разі виконання системи відеоспостереження згідно із чотирнадцятим пунктом формули винаходу блок реєстрації 7 містить: 7-1 - обчислювальний блок, 7-2 - відеоадаптер, 7-3 - вузол інтерфейсу, 7-4 - дисплей, 7-5 - вузол управління, 7-6 - вузол пам'яті. Вузли 7-1 - 7-6 об'єднані за допомогою інформаційної шини, що показана у вигляді лінії із стрілками, яка об'єднує перераховані вузли. Вхід вузла 7-2 відеоадаптеру є входом блоку 7 і підключений до виходу приймача 3. Виходи вузла інтерфейсу керування 7-3 підключені через інформаційну шину, що показана у вигляді лінії із стрілками, до блоків та вузлів системи за допомогою сполучень, що позначені літерою К. У разі виконання системи відеоспостереження згідно із п'ятнадцятим пунктом формули винаходу обчислювальний блок 7-1 містить апаратно-програмний вузол суміщення зображень (на малюнку не показаний), отриманих хоча б у дво х послідовних положеннях дефлектора. На Фіг.9 показані зображення 16-1 та 16-2, що отримані за допомогою системи у двох послідовних положеннях дефлектора без застосування вузла суміщення зображень. На Фіг.10 показане інтегральне зображення 16-S, що отримане за допомогою вузла суміщення зображень у двох послідовних положеннях дефлектора у разі виконання пристрою згідно із п'ятнадцятим пунктом формули винаходу. Пристрій працює таким чином. Привод 1-3 (див. Фіг.1) обертає рухому частину 1-2 поворотного пристрою 1 відносно осі О1, наприклад, за часовою стрілкою. Разом з рухомою частиною 1-2 обертається також приймач зображення 3, оптична приймальна система 4 та дефлектор 5. Під час повороту рухомої частини 1-2 поворотного пристрою на кут j1 (див. Фіг.2) вузол 6 управління дефлектором формує сигнали управляння, що надходять на входи X, Υ де флектора. Під дією сигналів управління положення осі оптичної приймальної системи 4 утримується у напрямку на об'єкт спостереження Н1 під час обертання. Одночасно з обертанням поворотного пристрою, зображення об'єкту Н1, сформоване приймачем зображення 3 та оптичною приймальною системою 4 фіксується блоком 7 реєстрації. Після досягнення кута повороту j1, вузол управління перемикає ось оптичної приймальної системи 4 у нове положення на об'єкт спостереження Н2 (див. Фіг.2.) і стабілізує положення оптичної осі під час реєстрації зображення об'єкту Н2. Процеси перемикання положення осі оптичної приймальної системи і стабілізації кутового положення осі на час реєстрації зображення повторюються безперервно, що дозволяє за допомогою одного приймача зображення зробити обор усього простору навколо системи спостереження і зареєструвати послідовність зображень у блоці 7 реєстрації і спостереження. Послідовність зображень, наприклад зображення 16-1 та 16-2 відтворюються (див. Фіг.9) на екрані телевізійного монітору або дисплею блока реєстрації 7. У разі необхідності огляду простору вздовж двох координат навколо системи спостереження, вузол управління дефлектором формує сигнали управляння дефлектором вздовж двох координат X та Υ, внаслідок чого дефлектор 5 послідовно змінює кутову орієнтацію осі оптичної приймальної системи 4 відносно осі Υ, що розташована під прямим кутом до площини малюнку. Таким чином, під час роботи здійснюється послідовний огляд усього простору навколо системи за допомогою одного пристрою спостереження з високою розподільчою здатністю без розмазування зображення. У разі використання оптичної приймальної системи разом із приймачем, що мають кут поля зору 0,5´0,5 радіана та кількості N=106 елементів розкладання (пікселей) зображення приймачем у кожному із положень дефлектора, сумарна кількість елементів розкладення зображення у круговій панорамі може досягати 10 , при кутовій розподільчій здатності 10-4 радіана, що і вирішує задачу винаходу. Огляд простору може здійснюватись як у режимі кругового обертання поворотного пристрою, так і в режимі сканування певного заданого сектора спостереження. Закон сканування задається блоком керування 2 і може змінюватись за рахунок зовнішнього управління, що більш детально описано у чотирнадцятому пункті формули винаходу. Досягнення тимчасової стабілізації кутового положення осі оптичної приймальної системи може бути здійснене у разі, якщо дефлектор пристрою розташований як на вході оптичної приймальної системи (див. Фіг.1, 2), так і на виході оптичної приймальної системи (див. Фіг.3) або у випадку розташування дефлектора між складовими компонентами оптичної приймальної системи( див. Фіг.4). У разі розташування дефлектора на виході оптичної приймальної системи ( див. Фіг.3) або між входом та ви ходом оптичної приймальної системи (див. Фіг.4) робота пристрою не відрізняється від роботи, що описана для випадку розташування дефлектору на вході оптичної приймальної системи. Змінюються лише деякі конструктивні параметри, як-то: розміри дефлектору, кути і закон сканування, тощо. Так, наприклад, розташування дефлектору на виході оптичної приймальної частини, що оговорене у третьому пункті формули винаходу, дозволяє зменшити розміри дефлектора до розмірів фоточутливої поверхні приймача зображення. При цьому сканування променів може здійснюватись в діапазоні кутів відхилення, що не перевищують кут поля зору оптичної приймальної системи і дорівнюють, наприклад, 0,1 радіана. Розташування дефлектора між входом та виходом оптичної приймальної системи, що оговорене у четвертому пункті формули винаходу, дозволяє використовувати дефлектор з розмірами, що не перевищують розмірів апертури оптичної приймальної системи в діапазоні кутів сканування, які не виходять за межі поля зору оптичної приймальної системи. Більш детально конструкція різних типів та робота дефлекторів описана, наприклад у книзі "Тепловізійні системи" авторів В.Г. Колобродов, Н. Шустер, Київ, 1999р., стор.92-99. Обертання поворотного пристрою відносно осі О1 здійснюється у відповідності до сигналів, що формуються блоком керування 2, при цьому привід 1-3 поворотного пристрою може містити вбудований датчик кутової швидкості, робота якого не є предметом винаходу і який потрібен для підтримування потрібної кутової швидкості обертів поворотного пристрою 1. У разі виконання пристрою згідно з п'ятим пунктом формули винаходу робота пристрою здійснюється аналогічно, але в цьому разі перемикання поля зору здійснюється під дією сигналів, що надходять з виходу датчика кутового положення 8 на перший вхід вузла управління 6 (див. Фіг.5). При досягненні кутів повороту, наприклад таких, що складають 80-90 відсотків від кута поля зору оптичної приймальної системи 4 із приймачем 3, вузол управління 6 формує сигнал перемикання кутового положення дефлектора. У проміжках між моментами перемикання дефлектор як і раніш працює у режимі стабілізації кутового положення поля зору. Таким чином, моменти перемикання кутового положення осі стають у відповідність до кутового положення поворотного пристрою, внаслідок чого підвищується стабільність розгортки простору пристроєм, оскільки моменти перемикання перестають залежати від нестабільності частоти обертів поворотного пристрою. Робота пристрою, що виконаний згідно з шостим пунктом формули винаходу здійснюється аналогічно, але в цьому разі перемикання поля зору здійснюється у той час, коли поворотний пристрій досягає кутів, значення яких надходять на другий вхід вузла управління 6 (див. Фіг.5). У цьому випадку, коли додаток до кута повороту перевищує встановлене за допомогою вузла значення кута перемикання, дефлектор перемикає положення кута поля зору оптичної системи. Вузол може бути виконаний у вигляді схеми тотожності цифрового коду кута повороту, що надходить з виходу датчика 8 та коду додатку. При цьому кожний раз, коли цифровий код сигналу датчика повороту 8 буде переходити через встановлене за допомогою вузла 9 значення кута, наприклад 0,05 радіан, на виході вузла буде з'являтися імпульс перемикання, що надходить на вхід вузла 6 управління дефлектором. Значення кута перемикання може змінюватись за допомогою органів керування вузла 9 (на малюнку не показані). Встановлення регульованого значення кута перемикання дозволяє розширити функціональні можливості пристрою, наприклад, під час заміни оптичної приймальної системи, або при зміні кута поля зору оптичної системи. Внаслідок цього з'являється можливість адаптування кута поля зору оптичної системи і розподільчої здатності пристрою під час його роботи до кутових розмірів потрібного об'єкту спостереження. Робота пристрою, що виконаний згідно з сьомим пунктом формули винаходу здійснюється аналогічно до вищенаведеної, але в цьому разі положення скануючого елементу дефлектору, наприклад комбінації призм або дзеркал контролюється датчиком положення 10, вихід якого підключений до інформаційного входу і вузла управління. Введення датчика дозволяє підвищити точність дотримання закону сканування дефлектору і забезпечити, таким чином, підвищення розподільчої здатності пристрою, особливо у разі наявності нелінійного закону сканування. Робота пристрою, що виконаний згідно з восьмим пунктом формули винаходу здійснюється аналогічно до вищенаведеної, але в цьому разі моменти перемикання поля зору додатково синхронізуються із частотою зміни кадрів приймача зображення 3. Для виконання операції синхронізації, сигнал з синхронізуючого виходу приймача зображення 3 (див. Фіг.5) надходить через вузол синхронізації 11 на синхронізуючий вхід S вузла управління. Під дією синхроімпульсу, а також при наявності ознак, що наведені вище ( тобто у разі досягнення додатку кута повороту, то що), вузол управління формує сигнал перемикання кута поля зору. Введення операції синхронізації дозволяє уникнути спотворення кадрів і зображення зони огляду під час здійснення перемикання поля зору оптичної системи пристрою. Дефлектор пристрою може бути виконаний у вигляді сукупності дзеркал, призм або пластин із матеріалу, який прозорий у спектральному діапазоні роботи пристрою. У дев'ятому, десятому, одинадцятому та дванадцятому пунктах формули винаходу наведені відмінності, які конкретизують взаємне розташування дефлектора відносно оптичної приймальної системи і поворотного пристрою. Так, наприклад, у разі розташування скануючого елементу, на відстані від фоточутливої поверхні приймача, яка дорівнює половині фокусного відрізку оптичної приймальної системи, з одночасним розташуванням електроприводу дефлектора на нерухомій частиш поворотного пристрою (що оговорене у десятому пункті формули винаходу) закон сканування суттєво спрощується і складається із сукупності поворотів сканую чого елементу на фіксовані кути. У цьому випадку під час руху поворотного пристрою (див. Фіг.6) зображення залишається нерухомим на фоточутли вій поверхні приймача зображення 3. Таким чином, під час реєстрації кутове переміщення дзеркала дефлектора забезпечується за рахунок взаємного руху рухомої і нерухомої частини поворотного пристрою. Після реєстрації зображення приймачем 3 дзеркало дефлектора перемикається у нове положення, внаслідок чого реалізується режим перемикання поля зору, що відповідає принципам роботи системи, описаним вище. Електропривод дефлектору може бути виконаний таким, що містить принаймні один шаговий або моментний двигун, що спрощує конструкцію пристрою за рахунок уникнення механічних редукторів. Застосування зазначених типів двигунів ого ворене у одинадцятому пункті формули винаходу. Виконання скануючого елементу дефлектора у вигляді принаймні однієї призми, або пластини із матеріалу, прозорого для випромінювання, які механічно сполучені із електроприводом, що оговорене у дванадцятому пункті формули винаходу (див. Фіг.7), конкретизує конструкцію дефлектора пристрою. Робота пристрою у цьому випадку не відрізняється від роботи, що описана вище. Аналогічно до описаного вище здійснюється також робота пристрою у разі використання у складі пристрою вузла управління кутом поля зору та підключення виходу вузла до керуючого входу КЗ оптичної приймальної системи (див. Фіг.8). У цьому випадку, під час роботи пристрою, кут поля зору оптичної приймальної системи може бути змінений для досягнення адаптації розподільчої здатності пристрою до кутови х розмірів об'єкту спостереження. Найбільш повно дозволяє забезпечити процес адаптивного керування режимами реєстрації та перемикання поля зору пристрій, який заявляється згідно із чотирнадцятим пунктом формули винаходу. У цьому випадку блок реєстрації виконаний на основі комп'ютерних вузлів: обчислювального блока, вузла відеоадаптеру, вузла керування, вузла інтерфейсу управління та дисплею (див. Фіг.8). Вихідні сигнали приймача 3 у аналоговому або цифровому вигляді надходять на вхід блоку 7 реєстрації та після проходження відеоадаптеру 7-2 реєструються обчислювальним блоком 7-1. Потрібні значення сканування, як-то значення кутової швидкості поворотного пристрою, значення кутів перемикання, кута поля зору оптичної приймальної системи, рівень чутливості та параметри розкладення зображення приймачем, тощо задаються за допомогою вузла керування 7-5, наприклад клавіатури. Використані значення вводяться через інформаційну шину блоку реєстрації до входу обчислювального блоку, який вводить потрібні значення огляду простору до входу інтерфейсу управління, з виходу якого сигнали керування пристроями, що зазначені у чо тирнадцятому пункті формули винаходу, надходять до керуючих входів, що позначені індексами К (див. Фіг.8). Під дією сигналів керування змінюється параметри огляду простору, як-то кутова швидкість поворотного пристрою, значення кута перемикання, закон сканування у дво х вимірах, кут поля зору оптичної приймальної системи, тощо. Водночас обчислювальний блок формує зображення 16-1, 16-2 і подальші, що були о тримані під час огляду простору, на екрані дисплею 7-4 (див. Фіг.9), а також реєструє отримані зображення за допомогою обчислювального блоку у вигляді інформації, що записується у вузол пам'яті 7-6. Вузол пам'яті виконаний, наприклад, у вигляді оперативної пам'яті обчислювального блоку або у вигляді накопичувача на магнітному або оптичному носії. Окрім того, обчислювальний блок поновлює зображення на екрані дисплею із кожним новим циклом огляду простору. Введення до складу обчислювального блоку апаратно - програмного вузла суміщення зображень, отриманих хоча б у двох послідовних положеннях дефлектора дозволяє сумістити окремі зображення (наприклад зображення 16-1 та 16-2), отримані під час перемикання поля зору оптичної приймальної системи у єдине зображення 16-S, що не має розривів та накладення (див. Фіг.10) і таким чином забезпечити отримання зображення із високою розподільчою здатністю в широкому куті огляду. Пристрій легко реалізується з використанням відомих вузлів, як-то: дефлектору на базі плоского дзеркала, приймача зображення на базі телевізійних або тепловізійних приймачів зображення фірм SONY, RAYTHEON, оптичних приймальних систем фірм OLYMPUS, C ANON, поворотного пристрою РТН-910 та блоку керування CBZ-220 фірми VIDEOTEC, електронно-обчислювальної машини EVEREST. Пристрій, що заявляється, дозволяє підвищити розподільчу здатність систем кругового або секторного огляду простору, у тому складі із введенням операцій адаптації параметрів огляду простору за допомогою керованих оптико-механічних та комп'ютерних вузлів. Використані джерела інформації: 1. Патент ЕПВ (ЕР) №0545456 МКВ H4ОN7\18публ. 06.09.1993р. 2. Патент ЕПВ (ЕР) №0529317 МКВ H04N7\18, G08B13\196 публ. 03.03.1993р. 3. Патент України №37291 "Система контролю та відеоспостереження", MКB G08B13/196, HО4N7\18публ. 14.03.1993р. 4. Патент ФРН №19639728 МКВ HO4N5\247, G08B13/196 публ. 09.04.1998р. 5. Колобродов В.Г., Шустер Η. "Тепловізійні системи", Київ, 1999р. - 340с.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of video supervision
Автори англійськоюProtasov Volodymyr Heorhiiovych
Назва патенту російськоюСпособ видеонаблюдения
Автори російськоюПротасов Владимир Георгиевич
МПК / Мітки
МПК: H04N 5/00, H04N 3/10, H04N 7/18
Мітки: відеоспостереження, система
Код посилання
<a href="https://ua.patents.su/9-70503-sistema-videosposterezhennya.html" target="_blank" rel="follow" title="База патентів України">Система відеоспостереження</a>
Система контролю та відеоспостереження
Номер патенту: 37291
Опубліковано: 15.05.2001
Автори: Балінський Євген Георгійович, Редчук Олександр Олександрович, Томас Лоуренс Гестон
МПК: H04N 7/18, G08B 13/194
Мітки: система, відеоспостереження, контролю
Формула / Реферат:
1. Система контролю та відеоспостереження, яка в кожній з визначених користувачем зон відеоспостереження об'єкта охорони містить щонайменше один датчик присутності і щонайменше одну відеокамеру, що зв'язані між собою, а також процесорний блок, який забезпечує її програмування по зонах і часу, з інтерфейсом для прийому сигналів з вказаних датчиків та виходу керуючих команд на перемикач камер, датчики присутності, відеокамери та пристрій...
Система відеоспостереження і відеореєстрації
Номер патенту: 68603
Опубліковано: 16.08.2004
Автори: Войдевич Ігор Валентинович, Макаренко Олексій Кузьмович
МПК: H04N 5/16, H04N 5/208, H04N 5/202, H04N 5/20, G03G 5/00, H04N 5/205, H04N 5/14, H04N 5/21, H04N 5/50, H04N 5/52, H04N 5/18, H04N 1/40
Мітки: відеоспостереження, система, відеореєстрації
Формула / Реферат:
Система відеоспостереження і відеореєстрації, яка містить відеосервер на базі комп'ютера, пристрій відображення інформації, виконаний у вигляді монітора, пристрої керування, пристрої формування відеосигналу, виконані у вигляді відеокамер, блоки живлення і канали передачі сигналів, виконані на базі електричних, оптичних кабелів, чи радіосигналів інших середовищ передачі сигналів, при цьому відеосервер містить одну чи більше плат...
Спеціальний пристрій відеоспостереження спв-2к
Номер патенту: 8822
Опубліковано: 15.08.2005
Автори: Зачек Олег Ігорович, Фірман Володимир Михайлович, Сеник Володимир Васильович, Слижук Володимир Михайлович, Горпинченко Євген Григорович
МПК: H04N 5/225, G03B 17/56
Мітки: спв-2к, спеціальний, пристрій, відеоспостереження
Формула / Реферат:
Спеціальний пристрій для відеоспостереження, який відрізняється тим, що містить напрямну сталеву трубу, всередині якої розміщена висувна сталева труба з можливістю вільного переміщення та фіксації в будь-якому положенні за допомогою фіксатора, на кінці висувної труби розміщена заглушка, на якій закріплений електричний рознім та кульовий шарнір, на якому закріплена відеокамера з радіопередавачем, що отримує живлення через електричний рознім,...
Нашоломна бінокулярна індикаторна система
Номер патенту: 34642
Опубліковано: 15.03.2001
Автори: Гой Віталій Миколайович, Шклярський Володимир Іванович, Кондратов Петро Олександрович
МПК: H04N 5/74, G02B 5/08, G02B 6/43
Мітки: індикаторна, нашоломна, система, бінокулярна
Формула / Реферат:
Нашоломна бінокулярна індикаторна система, яка містить канал для правого ока. що складається з оптично спряжених першого проекційного кінескопа, першого об'єктива, першого поворотного дзеркала та канал для лівого ока, що складається з оптично спряжених другого проекційного кінескопа, другого об'єктива, другого поворотного дзеркала, а також блок керування, електрично зв'язаний із виводами проекційних кінескопів, яка відрізняється тим, що у...
Оптико-електронна система огляду та цілевказування
Номер патенту: 35913
Опубліковано: 17.02.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: F41G 3/22
Мітки: огляду, цілевказування, система, оптико-електронна
Формула / Реферат:
1. Оптико-електронна система огляду та цілевказування, яка містить прилад нічного бачення, до складу якого входять послідовно з'єднані об'єктив, блок перетворення вхідного зображення та блок візуалізації зображення, реперний вузол, виконаний у вигляді набору реперних елементів, а також пристрій дистанційного визначення орієнтації реперного вузла та блок формування кутів цілевказування, яка відрізняється тим, що реперний вузол конструктивно...
Попередній патент: Поршневий двигун внутрішнього згорання
Наступний патент: Обмежувач витрати і тиску насоса гідропідсилювача керма
Випадковий патент: Спосіб хірургічного подовження першого променя у хворих з вродженою адактилією кисті