Пристрій контролю механічних напружень та деформацій в твердих середовищах
Номер патенту: 71637
Опубліковано: 15.12.2004
Автори: Клейман Яків Ісакович, Бродовий Володимир Олександрович, Кудрявцев Юрій Пилипович, Гуща Олег Йосипович, Сміленко Володимир Миколайович
Формула / Реферат
Пристрій контролю механічних напружень та деформацій в твердих середовищах, що містить послідовно з'єднані формувач сигналів збудження, підсилювач, атенюатор і послідовно з`єднані блок перетворення сигналів, вимірювач часових інтервалів, інтерфейс і блок автоматичного регулювання посилення, виходом підключений до другого входу атенюатора, формувач сигналів збудження, входом з'єднаний із другим виходом інтерфейсу, входи-виходи блока діалогового введення-виводу й інтерфейсу з'єднані між собою шинами управління, даних та адреси, який відрізняється тим, що додатково містить широкосмуговий підсилювач, перший вхід якого з'єднаний із виходом атенюатора, третій вхід з'єднаний із другим виходом блока автоматичного регулювання посилення, а вихід з'єднаний із першим входом блока перетворення сигналів, вихід якого з'єднаний із першим входом пристрою спостереження, вихід якого з'єднаний із входом формувача сигналів строба, вихід якого з'єднаний із другими входами пристрою спостереження, блока перетворення сигналів, широкосмугового підсилювача і вимірювачем амплітуди відбитого сигналу, перший вхід якого з'єднаний із виходом атенюатора і другим входом блока автоматичного регулювання посилення, а вхід-вихід шинами управління та команд з'єднаний із четвертим входом-виходом інтерфейсу, третій вхід-вихід якого шинами управління та команд з'єднаний із входом-виходом формувача сигналів строба, блока автоматичного регулювання посилення, формувача сигналів збудження і першим входом-виходом пристрою повороту та вибору ультразвукового перетворювача, другий вхід-вихід якого з'єднаний із другим входом-виходом спільного ультразвукового перетворювача поздовжньої та зсувної хвиль, першим входом-виходом з'єднаний із входом підсилювача і виходом формувача сигналів збудження, магнітопружний давач із пристроєм управління, вхід-вихід якого шинами управління та команд з'єднаний із шостим входом-виходом інтерфейсу, п'ятий вхід-вихід якого шинами управління та команд з'єднаний із вимірювачем часових інтервалів, перший вхід-вихід інтерфейсу шинами управління та команд з`єднаний із першим входом-виходом блока управління та контролю, другий вхід-вихід якого призначений для підключення комп`ютера.
Текст
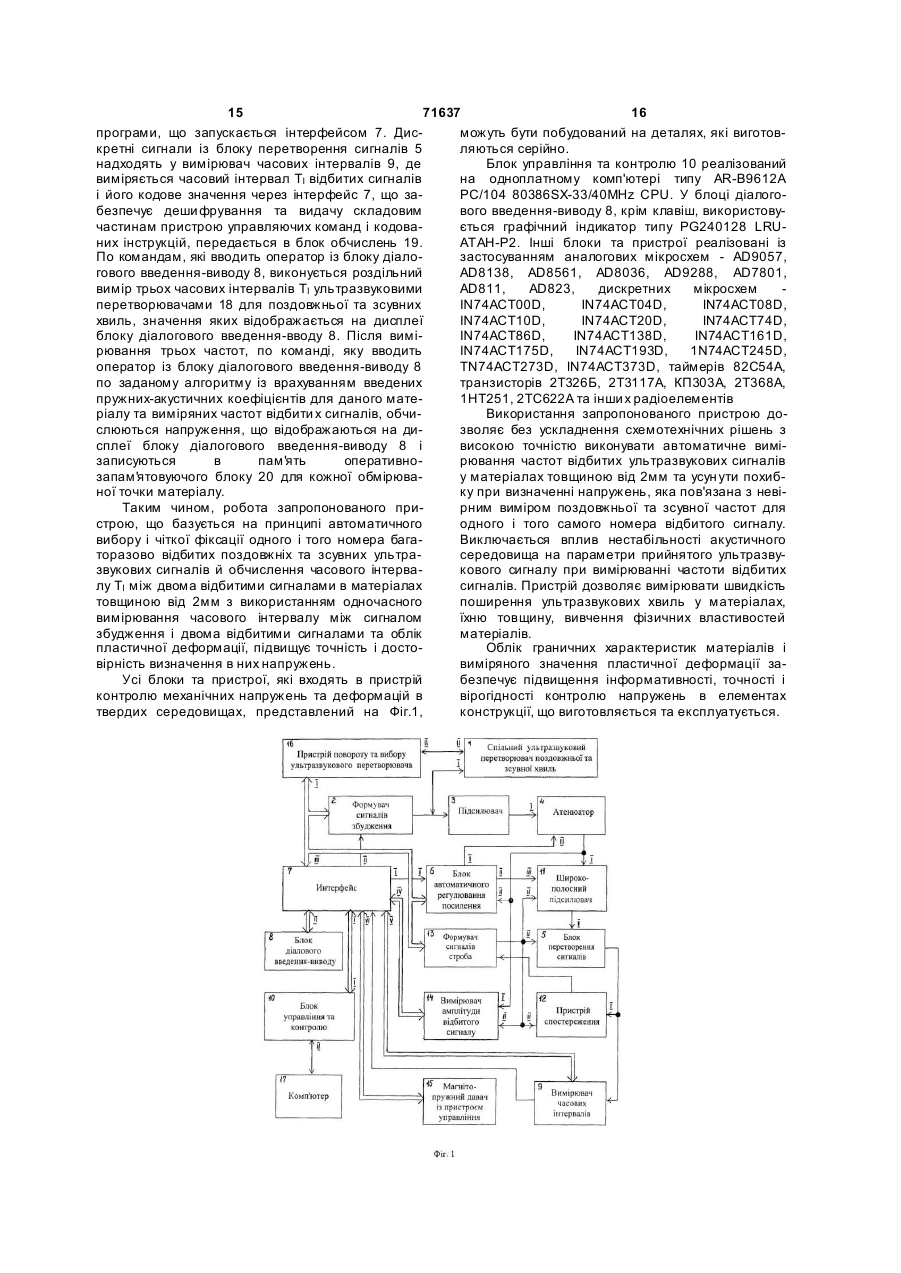
Пристрій контролю механічних напружень та деформацій в твердих середовища х, що містить послідовно з'єднані формувач сигналів збудження, підсилювач, атенюатор і послідовно з`єднані блок перетворення сигналів, вимірювач часових інтервалів, інтерфейс і блок автоматичного регулювання посилення, виходом підключений до другого входу атенюатора, формувач сигналів збудження, входом з'єднаний із другим виходом інтерфейсу, входи-ви ходи блока діалогового введення-виводу й інтерфейсу з'єднані між собою шинами управління, даних та адреси, який відрізняється тим, що додатково містить широкосмуговий підсилювач, перший вхід якого з'єднаний із виходом атенюатора, третій вхід з'єднаний із другим виходом блока автоматичного регулювання посилення, а вихід з'єднаний із першим входом блока перетво C2 2 (19) 1 3 71637 4 хвиль в матеріалі від величини, знаку та характеру контрольованій точці матеріалу. Максимум амплірозподілення напружень (А. с. №493728, МПК7 туди хвилі зсуву спостерігається при розміщенні G01N29/00,29/04, 1975р., А. с №1260841, МПК7 вектора поляризації ультразвукового зсувного пеG01N29/00, 1986p.). Характер такої залежності не ретворювача уздовж або поперек лінії прокату однаковий для різних типів ультразвукових хвиль і матеріалу. Також на швидкість розповсюдження залежить від механічних властивостей матеріалу і пружних ультразвукових хвиль та амплітуду призовнішніх силових впливів на нього. Так, наприйнятих сигналів впливають і такі фактори, як темклад, із зростанням розтягуючих напружень в ряді пература, хімічний склад матеріалу, термообробконструкційних матеріалів швидкість розповсюка, початковий деформований стан і текстура. дження ультразвукової хвилі зсуву, яка поляризоПристрої для вимірювання часового інтервалу вана вздовж діючого навантаження, зменшується, розповсюдження ультразвукової хвилі засновані а швидкість ультразвукової хвилі зсуву, поляризоздебільшого на частотно-імпульсному методі виваної поперек навантаження, збільшується. При мірювання і використовують метод автоциркуляції цьому швидкість розповсюдження поздовжньої імпульсів. Ме тод автоциркуляції імпульсів полягає ультразвукової хвилі зменшується. Подібні залежв тому, що прийняті приймачем відбиті ультразвуності існують і для поверхневих ультразвукових кові сигнали, що пройшли через досліджуваний хвиль. матеріал, використовуються для повторного запуВстановлено, що зміни швидкостей розповсюску і збудження ультразвукових сигналів. В редження ультразвукових хвиль під впливом напрузультаті встановлюється певна частота повторенжень невеликі. Для більшості металів та їх сплавів ня імпульсів збудження, яка прямо-пропорційна величина складає долі відсотка від номіналу. Тому часу пробігу ультразвукового сигналу і відображає для вимірювання швидкості розповсюдження прушвидкість розповсюдження ультразвукових хвиль жних хвиль в твердих тілах з напруженнями потрів досліджуваному матеріалі. В цих пристроях для бен пристрій, що забезпечує відносну похибку визбудження та прийому ультразвукових сигналів мірювання не вищу 10-6. використовуються акустичні перетворювачі, окреПрактично пропорційна залежність між змінамо для кожного типу хвиль. ми напруження та швидкостей розповсюдження Основним та суттєвим недоліком, що впливає пружних хвиль спостерігається в межах пружного на достовірність та точність контролю напружень є деформування досліджуваного матеріалу. Це обпохибка при вимірюванні частот відбитих ультрамежує застосування методу вимірюванню напрузвукових сигналів. Основними причинами, що жень в межах пружних деформацій. Для точного впливають на точність вимірювання частоти відбивизначення знаку, величини та характеру розподітих ультразвукових сигналів є: лення залишкових напружень в робочому перетині - залежність початкового положення відбитого контрольованого матеріалу необхідно роздільний ультразвукового сигналу від тривалості сигналу вимір швидкостей поздовжньої та зсувних ультразбудження для поздовжнього і зсувного ультразвузвукових хвиль. Відомі пристрої реалізують вищекового перетворювача; наведений метод контролю напружень у твердих - залежність початкового положення відбитого середовищах із застосуванням окремих перетвоультразвукового сигналу від його амплітуди при рювачів поздовжньої та зсувної ультразвукових зміні її у широкому динамічному діапазоні, що похвиль, що підключаються в точці виміру по черзі. З в'язано із тим, що сигнал запуску формується із огляду на відомі труднощі вимірювання швидкоамплітуди прийнятого відбитого сигналу в компастей розповсюдження ультразвукових хвиль з дораторі, рівень порога в якому встановлений вище статньою точністю, звичайно використовується рівня шумів і не змінюється в процесі вимірювання вимірювання часової характеристики швидкості частоти, а амплітуда прийнятого ультразвукового часового інтервалу розповсюдження (пробігу) ульсигналу може змінюватися в широкому динамічтразвукової хвилі від сигналу збудження ультраному діапазоні; звукових хвиль до прийому будь-якого номера - нестабільність акустичного середовища, що багаторазово відбитого сигналу, або зворотна йовпливає на параметри ультразвукового сигналу му величина - частота. Обміряні частоти та знапри багаторазовому проходженні його через серечення пружних-акустичних коефіцієнтів для даного довище акустичного контакту; типу матеріалу є вихідними даними для обчислен- зміна фронту першої півхвилі відбитого сигня діючих напружень. налу, що несе інформацію про напружений стан Пружно-акустичні коефіцієнти враховують матеріалу, що пов'язано із тим, що відбиті сигнали пружні властивості контрольованого матеріалу та від минулих імпульсів не встигають загаснути, при інші його фізико-хімічні характеристики, що визнацьому створюється високий рівень, хаотичність і чаються шляхом ультразвукових вимірювань зразсуперпозиція шумів, порівняних із амплітудою коків відповідних матеріалів у навантаженому і вільрисного сигналу, що накладаються на прийняті ному стані. відбиті сигнали; Встановлено, що поздовжня та зсувна ультра- відсутність можливості вибору і настроюванзвукові хвилі при поширенні усередині матеріалу ня на той самий дальній номер відбитого сигналу мають різну величину затухання. При цьому в оддля поздовжнього та зсувного ультразвукового ній і тій же точці виміру маємо різну кількість відперетворювача, в зв'язку із різним загасанням побитих сигналів для поздовжнього та зсувного пездовжньої та зсувної ультразвукових хвиль. ретворювача. Крім того, амплітуда прийнятих Відомий пристрій, що застосовується для консигналів зсувного ультразвукового перетворювача тролю механічних напружень в твердих середозмінюється від орієнтації площини поляризації в вища х, принцип роботи якого заснований на час 5 71637 6 тотно-імпульсному методі вимірювання часу поінтервалів Ті, із врахуванням введених пружнихширення ультразвуку з використанням системи акустичних коефіцієнтів для контрольованого маавтоциркуляції ультразвукових коливань. До склатеріалу, обчислюються напруження, що відобраду його входить ультразвуковий перетворювач, жуються на блоці діалогового введення-виводу і генератор електричних імпульсів, підсилювач, дезаписуються в пам'ять для кожної обмірюваної тектор, часовий селектор, лінія затримки, генераточки матеріалу. тор імпульсів збудження, схема збігу та електроОдин із основних та 4&ρθή«ιχ недоліків цього нно-лічильний вимірювач частоти (А. с. №493728, винаходу, що впливає на вірогідність та точність МПК7 G01N29/00, 1968р.). Недоліком цього винаконтролю напружень - це похибка при вимірюванні ходу, як і розглянутих аналогів, які використовують частот відбити х ультразвукових сигналів (дискретметод автоциркуляції імпульсів, полягає у низькій на та приладна), яка є наслідком виміру лише оддостовірності і точності вимірювання частоти відного часового інтервалу. При вимірюванні частот битих сигналів та визначення механічних навідбитих сигналів мас місце візуальний вибір непружень. обхідного прийнятого ультразвукового сигналу та За прототип запропонованого винаходу привикористання трьох роздільних (окремих) ультрайнятий пристрій контролю механічних напружень в звукових перетворювачів: одного - поздовжньої і твердих середовищах, що містить (див. Фіг.13): двох - зсувної хвилі та зміна ультразвукових перепослідовно з'єднані формувач сигналів збудження творювачів у процесі виконання контролю напру2, підсилювач 3, атенюатор 4 і послідовно з'єднані жень. Процес контролю супроводжується постійблок перетворення сигналів 5, вимірювач часових ним введенням команд для виконання наступних інтервалів 9, інтерфейс 7, блок автоматичного операцій і візуальним настроюванням на прийнярегулювання посилення 6, виходом підключений тий ультразвуковий сигнал. Таке ускладнене та до другого входу а тенюатора 4; формувач сигнабагатоопераційне вимірювання неминуче призволів збудження 2, входом з'єднаний з другим виходить до виникнення похибок. дом інтерфейсу 7; входи-виходиблоку діалогового Недоліком пристрою є також недостатня ефевведення-виводу 8 та інтерфейсу 7 з'єднані між ктивність і точність вимірювання частот відбитих собою шинами управління, даних та адресу. Крім сигналів у тонких матеріалах товщиною від 2мм. того він включає: блок обчислення 19 і оперативно Це пов'язано зі складністю автоматичного вибору, запам’ятовуючий блок 20, входи-виходи яких шивірогідності визначення та фіксації того самого нами управління даних та адресу з'єднані з вхономера відбитого ультразвукового сигналу для дами-виходами інтерфейсу 7, блоку діалогового поздовжнього та зсувного ультразвукового перевведення-виводу 8 та шинами управління - з вхотворювача, тому що перші відбиті сигнали знаходом-виходом формувача сигналів збудження 2, а дяться в золі наведення (перешкоди) від імпульсу також ультразвуковий перетворювач 18, що склазбудження. А це, в свою чергу, призводить до подається із двох змінних конструкцій які входомхибки визначення напружень у тонких матеріалах. виходом, по черзі, підключаються до виходу форКрім цього, в пристрої не забезпечується немувача сигналів збудження 2 і входу підсилювача обхідна точність вимірювання частоти відбитих 3; вихід атенюатора 4 з'єднаний із першим входом сигналів, яка пов'язана із залежністю часового блоку перетворення сигналів 5, другий ви хід якого положення сформованого дискретного відбитого з'єднаний із другим входом блоку автоматичного сигналу від величини амплітуди прийнятого ультрегулювання посилення 6, вихід якого з'єднаний із развукового сигналу при її зміні у великому динадругим входом блоку перетворення сигналів 5; мічному діапазоні. третій вихід інтерфейсу 7 з'єднаний із другим вхоУ відомому пристрої відсутня можливість врадом вимірювача часових інтервалів 9, другий вихід хування впливу пластичної де формації і текстури якого і другий вхід інтерфейсу з'єднані шинами прокату на величину напружень. зв'язку (А.с. №1756815, МПК7 G01N29/18, опубл. в В основу винаходу, що заявляється, поставБ.В. №31, 1992р.). лена задача підвищення інформативності, достоПринцип дії цього пристрою заснований на імвірності, автоматизації і точності контролю напрупульсному методі вимірюванні частоти слідування жень в елементах конструкцій за допомогою сигналів, суть якого полягає в тому, що в досліпристрою контролю механічних напружень в тверджуваному зразку збуджуються ультразвукові кодих середовищах шляхом оснащення його приливання і вимірюється часовий інтервал ТІ, почастроєм повороту та вибору ультразвукового переток якого - це передній фронт імпульсу збудження творювача, спільним ультразвуковим ультразвукових коливань, а кінець - прихід будьперетворювачем поздовжньої та зсувної хвиль, якого номера багаторазово відбитого сигналу, широкополосним підсилювачем, формувачем сигякий візуально вибирається оператором. При цьоналів стробу, пристроєм спостереження, магнітому частота проходження імпульсів збудження пружним давачем із пристроєм управління, блоком встановлена такою, щоб багаторазово відбиті ульуправління та контролю і вимірювачем амплітуди тразвукові сигнали, прийняті після кожного імпульвідбитого сигналу, а також оптимізації конструктису зб удження, повністю затухали. Виміряний часовних та функціональних зв'язків між цими елеменвий інтервал ТІ в прототипі представляється тами, що забезпечує можливість збудження та оберненою йому величиною, тобто частотою сліприймання ультразвукових сигналів без зміни ульдування відбитих сигналів. Збудження та притразвукових перетворювачів в точці виміру, безвіймання поздовжньої або зсувних ультразвукових зуальне виявлення необхідного номера багаторахвиль здійснюється роздільно ультразвуковими зово відбитих ультразвукових сигналів і фіксацію перетворювачами. Після виміру трьох часових одного і того номера відбитого сигналу для ульт 7 71637 8 развукового перетворювача поздовжньої та зсувлю і вимірювач амплітуди відбитого сигналу. Ввеної хвиль, вимірювання їх частот і амплітуд та видення цих елементів та удосконалення функціоназначення напружень із централізованим врахуванльних зв'язків між ними та іншими елементами ням введених характеристик матеріалів і схеми пристрою обумовлює досягнення наведеновиміряних величин, а також виключає залежність го вище те хнічного результату. початкового положення сформованого дискретноТак, введення спільного ультразвукового пего сигналу від зміни амплітуди прийнятого ультраретворювача поздовжньої та зсувної хвиль і призвукового сигналу та фізичних характеристик акусстрою повороту та вибору ультразвукового перетичного середовища. творювача дозволяє автоматизувати процес Поставлена задача досягається за рахунок товимірювання трьох часових інтервалів відбитих го, що пристрій контролю механічних напружень в ультразвукових сигналів без зміни поздовжнього твердих середовищах, що містить послідовно та зсувного ультразвукових перетворювачів у точці з'єднані формувач сигналів збудження, підсилювиміру. Одночасне вимірювання часових інтервавач, атенюатор і послідовно з'єднані блок перелів надає змогу уникнути дискретних та приладних творення сигналів, вимірювач часових інтервалів, похибок вимірювання, які завжди присутні при виінтерфейс, блок автоматичного регулювання помірюванні частот відбитих сигналів, визначених із силення, виходом підключений до другого входу застосуванням роздільних перетворювачів та поатенюатора; формувач сигналів збудження входальшого опрацювання одержаної інформації. У дом з'єднаний із другим виходом інтерфейсу; вхоцьому випадку використовується лише один функди-виходи блоку діалогового введення-виводу й ціональний елемент схеми (спільний ультразвукоінтерфейсу з'єднані між собою шинами управлінвий перетворювач поздовжньої та зсувної хвиль), ня, даних та адресу, згідно винаходу, додатково що мінімізує дискретні та приладні похибки контмістить широкополосний підсилювач, перший виролю напружень. Спільний ультразвуковий перехід якого з'єднаний із виходом атенюатора, третій творювач поздовжньої та зсувної хвиль представвхід з'єднаний із другим виходом блоку автоматиляє собою конструкцію, що складається із двох чного регулювання посилення, а вихід з'єднаний із п'єзоелементів поздовжньої та зсувної хвиль, рапершим входом блоку перетворення сигналів, визом закріплених до демпферу перетворювача, при хід якого з'єднаний із першим входом пристрою цьому п'єзоелемент поздовжньої хвилі (поздовжній спостереження, вихід якого з'єднаний із входом п'єзоелемент) закріплений до поверхні демпферу, формувача сигналів строба, вихід якого з'єднаний а п'єзоелемент зсувної хвилі (зсувний п'єзоелеіз другими входами пристрою спостереження, бломент) закріплений до поверхні поздовжнього п'єку перетворення сигналів, широкополосного підсизоелементу. В алгоритмі обчислення частоти відлювача і вимірювача амплітуди відбитого сигналу, битих сигналів для поздовжнього ультразвукового перший вхід якого з'єднаний із виходом атенюатоперетворювача враховується час проходження ра і другим входом блоку автоматичного регулюультразвукової поздовжньої хвилі через товщину вання посилення, а вхід-вихід шинами управління зсувного п'єзоелемента. та команд з'єднаний із четвертим входом-виходом Введення широкополосного підсилювача, фоінтерфейсу, третій вхід-вихід якого шинами управрмувача сигналів строба, пристрою спостереженління та команд з'єднаний із входом-виходом фоня і блоку управління та контролю обумовлює мормувача сигналів строба, блока автоматичного жливість зміни алгоритму роботи атенюатора, регулювання посилення, формувача сигналів збублоку перетворення сигналів, формувача сигналів дження і першим входом-виходом пристрою повозбудження і блоку автоматичного регулювання роту та вибору ультразвукового перетворювача, посилення, що дозволяє автоматично, без візуадругий вхід-вихід якого з'єднаний із другим вхольного настроювання на відбитий ультразвуковий дом-виходом спільного ультразвукового перетвосигнал вибирати необхідний номер багаторазово рювача поздовжньої та зсувної хвиль, першим відбитих ультразвукових сигналів і формува ти входом-виходом з'єднаний із входом підсилювача і дискретні сигнали при переході аналогового сигвиходом формувача сигналів збудження, магнітоналу через нуль Таке технічне рішення дозволяє пружний давач із пристроєм управління, вхід-ви хід забезпечити високу стабільність формування дисякого шинами управління та команд з єднану із кретних сигналів, передній фронт яких не залешостим входом-виходом інтерфейсу, п'ятий вхіджить від зміни величини амплітуди аналогового вихід якого шинами управління та команд з'єднавідбитого ультразвукового сигналу у великому ний із входом-виходом вимірювача часових інтердинамічному діапазоні та усунути похибку визнавалів, перший вхід-ви хід інтерфейсу шинами чення напружень у тонких матеріалах товщиною управління та команд з'єднаний із першим входомвід 2мм, яка пов'язана з неточністю вибору і фіквиходом блоку управління та контролю, другий сації одного і того ж номера багаторазово відбитовхід-ви хід якого призначений для підключення го сигналу для поздовжнього та зсувного ультракомп'ютера. звукових перетворювачів Запропонований пристрій у порівнянні з відоВведення магніто-пружного давача із пристромим містить нові конструктивні елементи, такі як єм управління та вимірювача амплітуди відбитого пристрій повороту та вибору ультразвукового песигналу дозволяє враховувати в процесі контролю ретворювача, спільний ультразвуковий перетвонапружень вплив пластичної деформації в матерірювач поздовжньої та зсувної хвиль, широкополоалі, а також враховува ти вплив текстури та велисний підсилювач, формувач сигналів строба, чину наклепу при прокаті матеріалу Таке технічне пристрій спостереження, магніто-пружний давач із рішення дозволяє підвищити достовірність і точпристроєм управління, блок управління та контроність методу контролю напружень в елементах 9 71637 10 конструкції, що виготовляється та експлуатується винаході, прийнятому за прототип Спільні конструВинахід ілюструють наведені креслення, де ктивні елементи, присутні в обох винаходах познана Фіг.1 представлена функціональна схема чені однаковими цифрами, позицією 18 позначезапропонованого пристрою контролю механічних ний ультразвуковий перетворювач, позицією напружень та деформацій в твердих середовища х, блок обчислень, позицією 20 - оперативнона Фіг.2-12 приведені часові діаграми, що позапам'ятовуючий блок. яснюють роботу пристрою, що заявляється; Функціонування запропонованого пристрою на Фіг.3 представлена функціональна схема базується на збудженні та прийманні ультразвуковідомого пристрою для контролю механічних навих сигналів сумісним ультразвуковим перетворюпружень в твердих середовищах вачем поздовжньої та зсувної хвиль, на безвізуаНа функціональній схемі запропонованого льному виявленні необхідних номерів пристрою (Фіг.1) конструктивні блоки позначені багаторазово відбитих ультразвукових сигналів і арабськими цифрами, а входи-виходи цих блоків вимірюванні їх частот слідування з використанням римськими Перший вхід-вихід спільного ультраодночасного вимірювання часових інтервалів між звукового перетворювача поздовжньої та зсувної двома відбитими сигналами, на вимірюванні ампхвиль 1 з'єднано з виходом формувача сигналів літуди відбитого ультразвукового сигналу і пластизбудження 2 і входом підсилювача 3, вихід якого чної деформації та визначення напружень із враз'єднано з першим входом атенюатора 4, вихід хуванням введених граничних характеристик якого з'єднано із першими входами широкополосматеріалів і виміряних величин. ного підсилювача 11 та вимірювачем амплітуди Підвищення точності вимірювання часових інвідбитого сигналу 14 і другим входом блока автотервалів (частот) відбитих ультразвукових сигналів матичного регулювання посилення 6, перший вив матеріалах товщиною від 2мм полягає в тім, що хід якого з'єднано із другим входом атенюатора 4, одночасно виконується вимірювання часових індругий ви хід блока автоматичного регулювання тервалів ТІ - від переднього фронту імпульсу збупосилення 6 з'єднано із третім входом широкоподження ультразвукових коливань, до зафіксованолосного підсилювача 11, вихід якого з'єднано із го першого (1Т1) відбитого ультразвукового першим входом блока перетворення сигналів 5, сигналу, і Т2 - від переднього фронту імпульсу вихід якого з'єднано із входом вимірювача часових збудження ультразвукових коливань, до зафіксоінтервалів 9 та першим входом пристрою спостеваного другого (1Т2) відбитого ультразвукового реження 12, вихід якого з'єднано із входом формусигналу (див Фіг.2-12) Обчислюється їхня різниця вача сигналів строба 13, вихід якого з'єднано із Т2–Т1 яка відповідає фактичному вимірюваному другими входами пристрою спостереження 12, значенню періоду ТІ між двома відбитими сигнаблока перетворення сигналів 5, широкополосного лами (Фіг.9, 10). При цьому виконується фіксована підсилювача 11 і вимірювача амплітуди відбитого прив'язка фронту імпульсів збудження до фронту сигналу 14, вхід-вихід якого шиною управління та рахункових сигналів високо стабілізованого генекоманд з’єднаний із четвертим входом-виходом ратора. інтерфейсу 7, п’ятий вхід-ви хід якого шиною Відомо, що для точного визначення напружень управління та команд з'єднано із входом-виходом необхідно чітко й однаково враховувати часовий вимірювача часових інтервалів 9, вихід якого з'єдінтервал Τх від переднього фронту імпульсу збунано із входом інтерфейсу 7, другий вихід якого дження ультразвукових коливань до одного і того з'єднано із входом формувача сигналів збудження номеру відбитого ультразвукового сигналу, як для 2, вхід-ви хід магніто-пружного давача із пристроєм поздовжнього ультразвукового п'єзоелементу, так і управління 15 шиною управління та команд з'єддля зсувного ультразвукового п'єзоелементу нано із шостим входом-виходом інтерфейсу 7, (Фіг.11, 12). Для тонких матеріалів ця умова не третій вхід-ви хід якого шиною управління та ковиконується через те, що початкові відбиті ультраманд з'єднано із входом-виходом формувача сигзвукові сигнали знаходяться в зоні перешкоди (інналів стро-ба 13, блока автоматичного регулювантервал А), що наводиться сигналом збудження, а ня посилення 6, формувача сигналів збудження 2 і також різною кількістю прийнятих відбитих ультрапершим входом-виходом пристрою повороту та звукових сигналів (Фіг.2, 3), що пов'язано із різним вибору ультразвукового перетворювача 16, другий затухання ультразвукових хвиль в матеріалах для вхід-ви хід якого з'єднано із другим входомпоздовжнього та зсувного ультразвукових перевиходом спільного ультразвукового перетворюватворювачів. Для автоматичного чіткого вибору ча поздовжньої та зсувної хвиль 1, вхід-ви хід блономера відбитого сигналу виконується заборона ку діалогового введення-виводу 8 шиною управна посилення перешкоди (інтервал А). Підсилюління, даних та адресу з'єднано із другим входомються тільки відбиті ультразвукові сигнали, що виходом інтерфейсу 7, перший вихід якого з'єдназнаходяться поза зоною перешкоди і тому перший но із першим входом блоку автоматичного регупосилений сигнал не є першим відбитим ультралювання посилення 6, перший вхід-вихід інтерзвуковим сигналом (Фіг.5). Тому часовий інтервал фейсу 7 шиною управління та команд з'єднано із Τх для сигналів поздовжнього [ультразвукового першим входом-виходом блоку управління та конп'єзоелемента, сформованого по п'ятому відбитотролю 10, другий вхід-ви хід (інтерфейс зв'язку RSму ультразвуковому сигналі (Фіг.2), не еквівалент232) якого призначений для підключення комп'юний часовому інтервалу Τх для сигналів зсувного тера 17. ультразвукового п'єзоелемента, сформованого по Для порівняння на Фіг.13 наведена функціонатретьому відбитому ультразвуковому сигналу льна схема пристрою для контролю механічних (Фіг.3). З огляду на вищевикладене, для точного напружень в твердих середовищах, описаного у визначення напружень у тонких металах товщи 11 71637 12 ною від 2мм необхідно вимірювати часовий інтервстановлений ключ (на схемі не показаний), що вал TІ між двома відбитими ультразвуковими сигвідключає вхід підсилювача 3 на час дії сигналу налами (Фіг.2, 3, 5). (На Фіг.2-12 позначення 1ВСзбудження. Однак, будь-який аналоговий ключ не 6ВС означають амплітуди відбити х ультразвукових в змозі цілком загасити імпульсний вплив сигналу сигналів). збудження. Тому на виході підсилювача 3 завжди На блоці діалогового введення-виводу 8 опемають місце загасаючі коливання тривалістю А ратором вибирається необхідний режим роботи мкс (Фіг.2, 3, 11, 12), величина яких залежить від пристрою і вибір з бази даних, попередньо введеамплітуди імпульсу збудження. них і збережених у пам'яті блоку управління та 3. Механічні коливання ультразвукової частоконтролю 10, значення пружно-акустичних коефіти, що поширюються в контрольованому матеріацієнтів для контрольованого матеріалу. В енерголі, приймаються поздовжнім п'єзоелементом, ці незалежну пам'ять блоку управління та контролю коливання перетворюються в електричні сигнали. 10 заносяться вимірювані значення частот і ампліУльтразвукові відбиті сигнали підсилюються в підтуд відбитих поздовжньої та зсувних ультразвукосилювачі 3, коефіцієнт підсилення якого обраний вих сигналів, вимірюване значення пластичної таким, щоб забезпечувалося неспотворене посидеформації та обчисленні значення напружень в лення ультразвукових сигналів при мінімальному контрольованому матеріалі. посиленні перешкод (Фіг.2. 3. 11, 12). Посилені Основні рекомендації та команди, що виникасигнали надходять в атенюатор 4. ють у процесі контролю напружень, обчислені зна4. Блок автоматичного регулювання посиленчення напружень і номограма їх розподілу в контня 6 по командах, що надходить із інтерфейсу 7, рольованому матеріалі відображаються на екрані видає сигнали управління атенюатору 4 на знидисплея блоку діалогового введення-виводу 8. ження його коефіцієнта затухання до рівня, при Спільний ультразвуковий перетворювач поякому на його виході буде зафіксовано,як мінімум, здовжньої та зсувної хвиль 1 встановлюється в два відбитих сигнали (Фіг.5). При цьому атенюатор контрольованій точці матеріалу і на блоці діалого4 відключається на час впливу перешкод (Фіг.4), вого введення-виводу 8 оператором набирається наведених від сигналу зб удження. Якщо при прономер вимірюваної точки і натискається відповідна грамній зміні коефіцієнта затухання від максимаклавіша. льного до мінімального на виході атенюатора 4 Алгоритм автоматичного способу находження, немає двох або більше відбитих сигналів, то з виділення і вимірювання частоти відбитих ультраблоку управління та контролю 10 у блок автоматизвукових сигналів для матеріалів товщиною від чного регулювання посилення 6 надходить коман2мм виконується в такий спосіб: да про встановлення максимального коефіцієнта 1. Сигнали управління і команд із блоку управзатухання в атенюаторі 4, а в формувач сигналів ління та контролю 10 надходять в інтерфейс 7, де збудження 2 - команда про збільшення амплітуди по заданій програмі надходять: сигналу збудження і процес находження та поси- у пристрій повороту та вибору ультразвуколення ультразвукових сигналів повторюється. При вого перетворювача 16, із якого сигнал управління відсутності на виході атенюатора 4 відбитих сигнадходить на спільний ультразвуковий перетвоналів видається команда про зупинку вимірювання рювач поздовжньої та зсувної хвиль 1, і тим самим частоти, а на дисплеї блоку діалогового впеденнязабезпечується підключення і коні роль поздовжвиводу 8 відображається інформація "Немає віднього ультразвукового п'єзоелемента до вимірюбитих сигналів". Таке технічне рішення забезпечує вання; неспотворене посилення ультразвукових відбитих - у формувач сигналів збудження 2, де встаносигналів до заданого рівня при зміні амплітуд ульвлюється і фіксується необхідна тривалість імпутразвукових коливань у широкому динамічному льсу збудження для поздовжнього ультразвуководіапазоні. го п'єзоелемента і мінімальна амплітуда сигналу 5. При наявності на виході атенюатора 4 відзбудження; битих сигналів блок автоматичного регулювання - у блок автоматичного регулювання посиленпосилення 6 фіксує встановлений коефіцієнт затуня 6, де формується початкова команда, по якій в хання, видає про це команду в інтерфейс 7. і по атенюаторі 4 встановлюється максимальний коезаданій програмі виконує аналіз і виділення повних фіцієнт затухання; відбитих сигналів, що не знаходяться в зоні наве- у формувач сигналів строба 13, в якому фодення сигналу збудження (Фіг.5). Ця інформація рмуються сигнали, що відключають широкополостакож надходить в інтерфейс 7. ний підсилювач 11, вимірювач амплітуди відбитого 6. Інтерфейс 7 по заданій програмі видає сигсигналу 14 і блок перетворення сигналів 5 від понали управління в формувач сигналів збудження силення та обробки відбитих сигналів. 2, фіксуючи встановлену амплітуду сигналу збу2. Сигнали збудження надходять на поздовждження, і в формувач сигналів строба 13. який ній п'єзоелемент, розміщений на спільному ультформує сигнали (строб) супроводу (Фіг.6). развуковому перетворювачі поздовжньої та зсув7. Широкополосний підсилювач 11 у стробі ної хвиль 1, де електричні сигнали підсилює і нормує відбиті ультразвукові сигнали до перетворюються в механічні коливання і через стандартного рівня (Фіг.7) відповідно до програмакустичний контакт між п'єзоелементом і поверхного управляючого сигналу, що надходить із блоку нею матеріалу надходять до досліджуваного маавтоматичного регулювання посилення 6. теріалу. При цьому сигнал збудження надходить і 8. Посилені відбиті ультразвукові сигнали на вхід підсилювача 3. Для захисту підсилювача 3 (Фіг.7) і сигнали супроводу (Фіг.6) надходять у блок від впливу сильного сигналу збудження в ньому перетворення сигналів 5, що виконує перетворен 13 71637 14 ня аналогових відбитих сигналів у дискретні сигамплітуди відбитого сигналу 14, в якому виконунали по нульовому рівню: перехід синусоїди через ється вимірювання амплітуди першої півхвилі віднуль (Фіг.8). Дане перетворення виконується в битого сигналу (Фіг.5). Вимірюване значення ампстробі для усунення формування сигналів по пелітуди надходить через інтерфейс 7 у блок решкодах (шумах). Таке технічне рішення дає моуправління та контролю 10, де записується в пажливість забезпечити фіксовану прив'язку фронту м'ять для даної вимірюваної точки дискретних сигналів до хвиль ультразвукових від13. Після вимірювання частоти й амплітуди битих сигналів, що не залежать від зміни амплітувідбитих сигналів для поздовжнього ультразвукоди прийнятих ультразвукових відбити х коливань, вого п'єзоелементу із блоку управління та контрозв'язаних зі зміною температури, властивостей лю 10 видається команда на встановлення всіх акустичного середовища та інших факторів пристроїв у початковий стан. 9. Дискретні відбиті сигнали (Фіг.9) і сигнали По вищеописаному алгоритмові (п.п.1 ... 13) супроводу (Фіг.6) надходять у пристрій спостеревиконується автоматичний вибір і вимірювання ження 12, який у випадку зсуву хвилі ультразвукочастоти відбитих сигналів із застосуванням зсуввого сигналу від центру строба (Фіг.7) виробляє ного ультразвукового п'єзоелемента (на схемі не сигнал неузгодженості, що надходить у формувач показаний), який виконує збудження та приймання сигналів строба 13 і встановлює строб у початкове відбитих сигналів при розповсюдженні поляризоположення. Такий алгоритм і його технічна реаліваної ультразвукової хвилі в напрямку дії наванзація дозволяє автоматично відслідковувати часотаження або вздовж лінії прокату матеріалу. Потім ве положення прийнятої хвилі ультразвукового виконується автоматичний поворот спільного ульсигналу при динамічній зміні напружень в матразвукового перетворювача поздовжньої та зсувтеріалі. ної хвиль 1 на 90° і виконується автоматичний ви10. Дискретні відбиті сигнали (Фіг.9) надходять бір і вимірювання частоти відбитих сигналів із у вимірювач часових інтервалів 9, де виконується застосуванням зсувного ультразвукового п'єзовимірювання часового інтервалу ТІ між двома проелемента, який виконує збудження та приймання грамно установленими відбитими сигналами по відбитих сигналів при розповсюдженні поляризопринципу, описаному ви ще. Вибір першого сигналу ваної ультразвукової хвилі в напрямку, перпенди1Т1 виконується з умови: n-2, а другий сигнал 2Т2 кулярному дії навантаження або перпендикулярn-1, де n - кількість відбитих сигналів, сформованому лінії прокату матеріалу них у блоці перетворення сигналів 5. За умови, що Після виміру трьох частот і амплітуд відбити х ультразвукових сигналів поздовжнім та зсувним n£2 і Т1³2ТI, виконується тільки вимір часового ультразвуковими п'єзоелементами видається коінтервалу Т1 - від переднього фронту імпульсу збудження до першого вибраного відбитого ультманда на вимір амплітуди сигналу магнітопружним давачем із пристроєм управління 15, коразвукового сигналу (Фіг.11). Вимірюване значендове значення якої надходить через інтерфейс 7 у ня періоду Т1 у виді коду надходить через інтерблок управління та контролю 10, де записується в фейс 7 у блок управління та контролю 10. де по пам'ять для даної вимірюваної точки. заданому алгоритмі обчислюється значення частоти відбитого сигналу, що запам'ятовується в В блоці управління та контролю 10 по заданому алгоритму обчислюються напруження і записуОЗУ. Потім блок управління та контролю 10 видає ються в пам'ять для вимірюваної точки на поверхні команду про повторний вимір періоду ТI. Цикл виматеріалу міру виконується 16 разів, обчислюється середнє Введення до схеми запропонованого призначення часового інтервалу відбитих сигналів, який переводиться в частоту слідування ультрастрою перелічених вище конструктивних блоків і встановлений зв'язок між ними обумовлює особзвукових сигналів, що запам'ятовується в ОЗУ ливість роботи пристрою, відмінну від роботи віблоку управління та контролю 10. Таке технічне домого (прототипу) пристрою, яка здійснюється рішення підвищує точність вимірювання частоти наступним чином (Фіг.3): відбитих сигналів, що пов'язане із впливом приладових часови х затримок. У залежності від встановленого типу ультразвукового перетворювача 18 у контрольованій то11. Після обчислення першого значення часчці матеріалу, оператор вводить код виміру частототи відбитого сигналу видається команда в блок ти відбитих сигналів для зсувного або автоматичного регулювання посилення 6 про поздовжнього перетворювача 18 і по команді, що встановлення максимального коефіцієнта затухання в атенюаторі 4 і в формувач сигналів збунадходить із блоку діалогового введення-виводу 8, формувач сигналів збудження 2 формує сигнали дження 2 - про зменшення амплітуди сигналів збузбудження потрібної тривалості для працюючого дження. Потім видається команда про повторне ультразвукового перетворювача 18 Збудження та автоматичне виділення і вимірювання частоти відприймання поздовжньої або зсувної хвиль здійсбитих сигналів, що виконується по вищеописаному алгоритмові. Цикл повторюється 8 разів. Виконунюється ультразвуковим перетворювачем 18. Прийняті відбиті ультразвукові сигнали підсилюється аналіз вимірюваних частот для усунення ються в підсилювачі 3 і надходять до атенюатора можливих випадкових вимірювань частот по пе4, у якому по команді, що надходить із блоку авторешкодах (шумах). Обчислюється середнє знаматичного регулювання посилення 6, встановлючення частоти відбитих сигналів і записується в пам'ять блоку управління та контролю 10 для виється необхідний коефіцієнт затухання. Блок автоматичного регулювання посилення 6 мірюваної точки. управляється по лінії зворотного зв'язку із відпові12. Відбиті сигнали з атенюатора 4 (Фіг.5) і сидного виходу блока 5 та кодом сигналу управління гнали супроводу (Фіг.6) надходять у вимірювач 15 71637 16 програми, що запускається інтерфейсом 7. Дисможуть бути побудований на деталях, які виготовкретні сигнали із блоку перетворення сигналів 5 ляються серійно. надходять у вимірювач часових інтервалів 9, де Блок управління та контролю 10 реалізований виміряється часовий інтервал ТІ відбитих сигналів на одноплатному комп'ютері типу AR-B9612A і його кодове значення через інтерфейс 7, що заPC/104 80386SX-33/40MHz CPU. У блоці діалогобезпечує деши фрування та видачу складовим вого введення-виводу 8, крім клавіш, використовучастинам пристрою управляючих команд і кодовається графічний індикатор типу PG240128 LRUних інструкцій, передається в блок обчислень 19. ATAH-P2. Інші блоки та пристрої реалізовані із По командам, які вводить оператор із блоку діалозастосуванням аналогових мікросхем - AD9057, гового введення-виводу 8, виконується роздільний AD8138, AD8561, AD8036, AD9288, AD7801, вимір трьох часових інтервалів ТІ ультразвуковими AD811, AD823, дискретних мікросхем перетворювачами 18 для поздовжньої та зсувних IN74ACT00D, IN74ACT04D, IN74ACT08D, хвиль, значення яких відображається на дисплеї IN74ACT10D, IN74ACT20D, IN74ACT74D, блоку діалогового введення-вводу 8. Після виміIN74ACT86D, IN74ACT138D, IN74ACT161D, рювання трьох частот, по команді, яку вводить IN74ACT175D, IN74ACT193D, 1N74ACT245D, оператор із блоку діалогового введення-виводу 8 TN74ACT273D, IN74ACT373D, таймерів 82С54А, по заданому алгоритму із врахуванням введених транзисторів 2Т326Б, 2Т3117А, КП303А, 2Т368А, пружних-акустичних коефіцієнтів для даного мате1НТ251, 2ТС622А та інши х радіоелементів ріалу та виміряних частот відбити х сигналів, обчиВикористання запропонованого пристрою дослюються напруження, що відображаються на дизволяє без ускладнення схемотехнічних рішень з сплеї блоку діалогового введення-виводу 8 і високою точністю виконувати автоматичне вимізаписуються в пам'ять оперативнорювання частот відбитих ультразвукових сигналів запам'ятовуючого блоку 20 для кожної обмірювау матеріалах товщиною від 2мм та усун ути похибної точки матеріалу. ку при визначенні напружень, яка пов'язана з невіТаким чином, робота запропонованого прирним виміром поздовжньої та зсувної частот для строю, що базується на принципі автоматичного одного і того самого номера відбитого сигналу. вибору і чіткої фіксації одного і того номера багаВиключається вплив нестабільності акустичного торазово відбитих поздовжніх та зсувних ультрасередовища на параметри прийнятого ультразвузвукових сигналів й обчислення часового інтервакового сигналу при вимірюванні частоти відбитих лу ТІ між двома відбитими сигналами в матеріалах сигналів. Пристрій дозволяє вимірювати швидкість товщиною від 2мм з використанням одночасного поширення ультразвукових хвиль у матеріалах, вимірювання часового інтервалу між сигналом їхню товщину, вивчення фізичних властивостей збудження і двома відбитими сигналами та облік матеріалів. пластичної деформації, підвищує точність і достоОблік граничних характеристик матеріалів і вірність визначення в них напружень. виміряного значення пластичної деформації заУсі блоки та пристрої, які входять в пристрій безпечує підвищення інформативності, точності і контролю механічних напружень та деформацій в вірогідності контролю напружень в елементах твердих середовищах, представлений на Фіг.1, конструкції, що виготовляється та експлуатується. 17 Комп’ютерна в ерстка Т. Чепелев а 71637 Підписне 18 Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for monitoring stresses and deformations in solid media
Автори англійськоюSmilenko Volodymyr Mykolaiovych, Guscha Oleh Yosypovych, Brodovyi Volodymyr Oleksandrovych
Назва патенту російськоюУстройство для контроля механических напряжений и деформаций в сплошных средах
Автори російськоюСмиленко Владимир Николаевич, Гуща Олег Иосифович, Бродовый Владимир Александрович
МПК / Мітки
МПК: G01N 29/07, G01N 29/24
Мітки: механічних, деформацій, твердих, напружень, середовищах, пристрій, контролю
Код посилання
<a href="https://ua.patents.su/9-71637-pristrijj-kontrolyu-mekhanichnikh-napruzhen-ta-deformacijj-v-tverdikh-seredovishhakh.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю механічних напружень та деформацій в твердих середовищах</a>
Пристрій для вимірювання механічних напружень та деформацій в твердих середовищах
Номер патенту: 23067
Опубліковано: 30.06.1998
Автори: Сміленко Володимир Миколайович, Кот Володимир Григорович, Гуща Олег Йосипович, Федченко Володимир Іванович
МПК: G01N 29/04
Мітки: вимірювання, твердих, деформацій, механічних, середовищах, пристрій, напружень
Формула / Реферат:
Устройство для измерения механических напряжений и деформаций в твердых средах, содержащее аттенюатор аналоговый, блок автоматической регулировки усиления, блок преобразования сигналов, вход-выходы интерфейса, блока диалогового ввода-вывода, блока вычислений и управления, оперативно запоминающего блока соединены между собой шинами управления, адреса и данных, выход формирователя сигналов возбуждения соединен с первыми входами усилителя и...
Пристрій для контролю механічних напруг в твердих середовищах
Номер патенту: 15678
Опубліковано: 30.06.1997
Автори: Чесовник Володимир Михайлович, Золотов Вадім Федоровіч, Бєлявін Володимир Федорович, Гузовскій Вадім Васільєвіч, Майко Віталій Іванович, Сміленко Володимир Миколаєвич
МПК: G01N 29/024
Мітки: контролю, середовищах, твердих, механічних, пристрій, напруг
Текст:
...3, выход которого соедиты, адрес контролируемой точки, обозначанен с первым входом аттенюатора 4, выход ющий массив блока 11, в котором хранятся которого соединен с первым входом Ьлока константы и данные измерений и расчетов 5, второй вход которого соединен со вторым по этой точке. После набора и ввода выбранаттенюатором и выходом блока б, первый 15678 ного режима на дисплее блока 8 инициируются символы операций, которые должен...
Пристрій ультразвукового контролю зміни концентрацій домішок в газових та рідинних середовищах
Номер патенту: 63422
Опубліковано: 15.01.2004
Автори: Зеленков Олександр Аврамович, Казак Василь Миколайович, Соченко Петро Степанович, Пазюк Олексій Вячеславович
МПК: G01J 3/00
Мітки: пристрій, ультразвукового, концентрацій, рідинних, контролю, домішок, газових, середовищах, зміни
Формула / Реферат:
1. Пристрій ультразвукового контролю зміни концентрацій домішок в газових та рідинних середовищах, який містить послідовно з'єднані генератор високої частоти, акустичний випромінювач-приймач, вимірювач часу затримки та індикатор, причому вимірювач часу затримки містить генератор тактових імпульсів, послідовно з'єднаний з першим входом модуля логічного множення, другий вхід якого з'єднаний з виходом тригера, перший вхід якого з'єднаний з...
Охолоджуючий пристрій для зниження зварювальних деформацій та напружень
Номер патенту: 37583
Опубліковано: 15.05.2001
Автори: Гедрович Анатолій Іванович, Кузьменко Віктор Сергійович, Жидков Андрій Борисович
МПК: B23K 9/035, B23K 9/038
Мітки: зварювальних, зниження, пристрій, охолоджуючий, напружень, деформацій
Формула / Реферат:
(21) 2000010070(54) (57)Дата прийняття рішення21 березня 2001 р.Охолоджуючий пристрій для зниження зварювальних деформацій та напружень, який містить корпус, пористий наповнювач та трубопровід з отворами для подачі охолоджуючої рідини, розміщений в об'ємі матеріалу й виконаний гнучким, який відрізняється тим, що корпус пристрою виконано з термостійкої тканини у вигляді жолоба, верхній край якого стягнуто...
Охолоджуючий пристрій для зниження зварювальних деформацій і напружень
Номер патенту: 45114
Опубліковано: 15.03.2002
Автори: Гедрович Анатолій Іванович, Гальцов Ігор Олександрович
МПК: B23K 9/035, B23K 9/038
Мітки: пристрій, зниження, напружень, зварювальних, деформацій, охолоджуючий
Формула / Реферат:
1 Охолоджуючий пристрій для зниження зварювальних деформацій і напружень, що містить спеціальний кондуктор у вигляді коробки з вертикальними стояками, між якими розташовано шари пористої непальної гігроскопічної речовини типу вати, під яку подають охолоджувач, який відрізняється тим, що замість спеціального кондуктора з вертикальними стояками він оснащений двома розбірними роликами, що вільно обертаються на з'єднувальних трубках для подання...
Попередній патент: Спосіб нагрівання злитків у нагрівальних колодязях
Наступний патент: Антипедикульозний засіб
Випадковий патент: Спосіб отвердіння ливарних форм і стрижнів з рідкоскляних сумішей