Спосіб (варіанти) та пристрій (варіанти) для перетворення зі зниженням частоти прийнятого сигналу, приймальний пристрій та машинозчитуваний носій для зберігання програмного модуля для реалізації способу
Номер патенту: 80262
Опубліковано: 10.09.2007
Автори: Смі Джон, Джаяраман Срікант, Фернандес-Корбатон Іван Хесус

Формула / Реферат
1. Спосіб перетворення зі зниженням частоти прийнятого сигналу, який полягає у тому, що
генерують аналоговий сигнал несучої, що має першу частоту, з першого джерела генерації, яке має перший частотний діапазон і перше частотне розрізнення,
генерують цифровий сигнал несучої, що має другу частоту, з другого джерела генерації, яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і
множать прийнятий сигнал на аналоговий сигнал несучої і цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу.
2. Спосіб за п. 1, який відрізняється тим, що додатково вимірюють залишкову помилку частоти у перетвореному зі зниженням частоти сигналі та коректують другу частоту на основі згаданого вимірювання.
3. Спосіб за п. 1, який відрізняється тим, що додатково підвищують першу частоту на розмір кроку грубої частоти і знижують другу частоту на розмір кроку грубої частоти.
4. Спосіб за п. 1, який відрізняється тим, що додатково знижують першу частоту на розмір кроку грубої частоти і підвищують другу частоту на розмір кроку грубої частоти.
5. Спосіб перетворення зі зниженням частоти прийнятого сигналу, який полягає у тому, що
генерують аналоговий сигнал несучої, що має першу частоту, з першого джерела генерації, яке має перший частотний діапазон і перше частотне розрізнення,
множать прийнятий сигнал на аналоговий сигнал несучої для вироблення скоректованого аналогового сигналу,
піддають дискретизації скоректований аналоговий сигнал для одержання потоку цифрових вибірок,
генерують цифровий сигнал несучої, що має другу частоту, з другого джерела генерації, яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і
множать скоректований аналоговий сигнал на цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу.
6. Спосіб за п. 5, який відрізняється тим, що додатково вимірюють залишкову помилку частоти у перетвореному зі зниженням частоти сигналі та коректують другу частоту на основі згаданого вимірювання.
7. Спосіб за п. 5, який відрізняється тим, що додатково підвищують першу частоту на розмір кроку грубої частоти і знижують другу частоту на розмір кроку грубої частоти.
8. Спосіб за п. 5, який відрізняється тим, що додатково знижують першу частоту на розмір кроку грубої частоти і підвищують другу частоту на розмір кроку грубої частоти.
9. Пристрій для перетворення зі зниженням частоти прийнятого сигналу, що містить
засіб для генерації аналогового сигналу несучої, що має першу частоту, з першого джерела генерації, яке має перший частотний діапазон і перше частотне розрізнення,
засіб для генерації цифрового сигналу несучої, що має другу частоту, з другого джерела генерації, яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і
засіб для множення прийнятого сигналу на аналоговий сигнал несучої та цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу.
10. Пристрій за п. 9, який відрізняється тим, що додатково містить засіб для вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі та засіб для корекції другої частоти на основі згаданого вимірювання.
11. Пристрій за п. 9, який відрізняється тим, що додатково містить засіб для підвищення першої частоти на розмір кроку грубої частоти і засіб для зниження другої частоти на розмір кроку грубої частоти.
12. Пристрій за п. 9, який відрізняється тим, що додатково містить засіб для зниження першої частоти на розмір кроку грубої частоти і засіб для підвищення другої частоти на розмір кроку грубої частоти.
13. Пристрій для перетворення зі зниженням частоти прийнятого сигналу, що містить
засіб для генерації аналогового сигналу несучої, що має першу частоту, з першого джерела генерації, яке має перший частотний діапазон і перше частотне розрізнення,
засіб для множення прийнятого сигналу на аналоговий сигнал несучої для вироблення скоректованого аналогового сигналу,
дискретизатор для дискретизації скоректованого аналогового сигналу для одержання потоку цифрових вибірок,
засіб для генерації цифрового сигналу несучої, що має другу частоту, з другого джерела генерації, яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і
засіб для множення скоректованого аналогового сигналу на цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу.
14. Пристрій за п. 13, який відрізняється тим, що додатково містить засіб для вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі і засіб для корекції другої частоти на основі згаданого вимірювання.
15. Пристрій за п. 13, який відрізняється тим, що додатково містить засіб для підвищення першої частоти на розмір кроку грубої частоти і засіб для зниження другої частоти на розмір кроку грубої частоти.
16. Пристрій за п. 13, який відрізняється тим, що додатково містить засіб для зниження першої частоти на розмір кроку грубої частоти і засіб для підвищення другої частоти на розмір кроку грубої частоти.
17. Приймальний пристрій, що містить
аналоговий генератор, який має перший частотний діапазон і перше частотне розрізнення, для формування аналогового сигналу несучої, що має першу частоту,
аналоговий перетворювач частоти для множення прийнятого сигналу на аналоговий сигнал несучої для вироблення першого перетвореного зі зниженням частоти сигналу,
цифровий генератор, який має другий частотний діапазон і друге частотне розрізнення, для формування цифрового сигналу несучої, що має другу частоту, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і
цифровий перетворювач частоти для множення першого перетвореного зі зниженням частоти сигналу на цифровий сигнал несучої для вироблення другого перетвореного зі зниженням частоти сигналу.
18. Пристрій за п. 17, який відрізняється тим, що додатково містить модуль відслідковування частоти для вимірювання залишкової помилки частоти у другому перетвореному зі зниженням частоти сигналі та керуючий процесор для корекції першої частоти першого сигналу несучої і другої частоти другого сигналу несучої на основі згаданого вимірювання.
19. Пристрій за п. 18, який відрізняється тим, що модуль відслідковування частоти являє собою систему відслідковування частоти.
20. Пристрій за п. 18, який відрізняється тим, що модуль відслідковування частоти являє собою систему відслідковування частоти першого порядку.
21. Пристрій за п. 18, який відрізняється тим, що модуль відслідковування частоти являє собою систему відслідковування частоти другого порядку.
22. Пристрій за п. 17, який відрізняється тим, що цифровий генератор є цифровим обертачем.
23. Пристрій за п. 17, який відрізняється тим, що цифровий генератор є цифровим синтезатором з прямим синтезом частот.
24. Пристрій за п. 17, який відрізняється тим, що аналоговий генератор є генератором, керованим напругою.
25. Пристрій за п. 17, який відрізняється тим, що аналоговий генератор є кварцовим генератором з температурною стабілізацією.
26. Пристрій за п. 17, який відрізняється тим, що додатково містить
модулятор щільності імпульсів для формування послідовності імпульсів, який має робочий цикл, що змінюється відповідно до цифрового вхідного сигналу, і
фільтр нижніх частот для перетворення послідовності імпульсів у напругу, яка приблизно не змінюється у часі, причому величина напруги, що не змінюється у часі, змінюється відповідно до робочого циклу послідовності імпульсів, і перша частота змінюється відповідно до напруги, що приблизно не змінюється у часі.
27. Пристрій за п. 17, який відрізняється тим, що додатково містить керуючий процесор для корекції першої частоти і другої частоти.
28. Пристрій за п. 27, який відрізняється тим, що додатково містить машинозчитуваний носій, який зв'язаний зі згаданим керуючим процесором і містить програмний модуль, виконуваний згаданим керуючим процесором, при цьому виконання програмного модуля керуючим процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого згаданим приймальним пристроєм, що включає в себе вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі та корекцію другої частоти на основі згаданого вимірювання.
29. Пристрій за п. 27, який відрізняється тим, що додатково містить машинозчитуваний носій, який зв'язаний зі згаданим керуючим процесором і містить програмний модуль, виконуваний згаданим керуючим процесором, при цьому виконування програмного модуля керуючим процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого згаданим приймальним пристроєм, що включає в себе підвищення першої частоти на розмір кроку грубої частоти і зниження другої частоти на розмір кроку грубої частоти.
30. Пристрій за п. 27, який відрізняється тим, що додатково містить машинозчитуваний носій, який зв'язаний зі згаданим керуючим процесором і містить програмний модуль, виконуваний згаданим керуючим процесором, при цьому виконування програмного модуля керуючим процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого згаданим приймальним пристроєм, що включає в себе зниження першої частоти на розмір кроку грубої частоти і підвищення другої частоти на розмір кроку грубої частоти.
31. Машинозчитуваний носій для зберігання програмного модуля, виконаний з можливістю виконування програмним процесором приймального пристрою, при цьому виконування програмного модуля процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого приймальним пристроєм, який включає в себе
генерацію сигналу керування першою частотою для керування першою частотою аналогового сигналу несучої на виході аналогового генератора, що має перший частотний діапазон і перше частотне розрізнення,
генерацію сигналу керування другою частотою для керування другою частотою цифрового сигналу несучої на виході цифрового генератора, що має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення,
вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі і
корекцію другої частоти на основі згаданого вимірювання.
32. Машинозчитуваний носій за п. 31, який відрізняється тим, що реалізовуваний при виконанні згаданого модуля спосіб додатково включає в себе корекцію сигналу керування першою частотою для підвищення першої частоти на розмір кроку грубої частоти і корекцію сигналу керування другою частотою для зниження другої частоти на розмір кроку грубої частоти.
33. Машинозчитуваний носій за п. 31, який відрізняється тим, що реалізовуваний при виконанні згаданого модуля спосіб додатково включає в себе корекцію сигналу керування першою частотою для зниження першої частоти на розмір кроку грубої частоти і корекцію сигналу керування другою частотою для підвищення другої частоти на розмір кроку грубої частоти.
34. Машинозчитуваний носій за п. 31, який відрізняється тим, що у реалізовуваному при виконанні згаданого модуля способі сигнал керування першою частотою є цифровим сигналом, який подається у модулятор щільності імпульсів згаданого аналогового генератора.
35. Машинозчитуваний носій за п. 31, який відрізняється тим, що у реалізовуваному при виконанні згаданого модуля способі сигнал керування другою частотою є цифровим сигналом, який подається у цифровий обертач згаданого цифрового генератора.
36. Машинозчитуваний носій за п. 31, який відрізняється тим, що у реалізовуваному при виконанні згаданого модуля способі сигнал керування другою частотою є цифровим сигналом, який подається у цифровий синтезатор з прямим синтезом частот згаданого цифрового генератора.
Текст
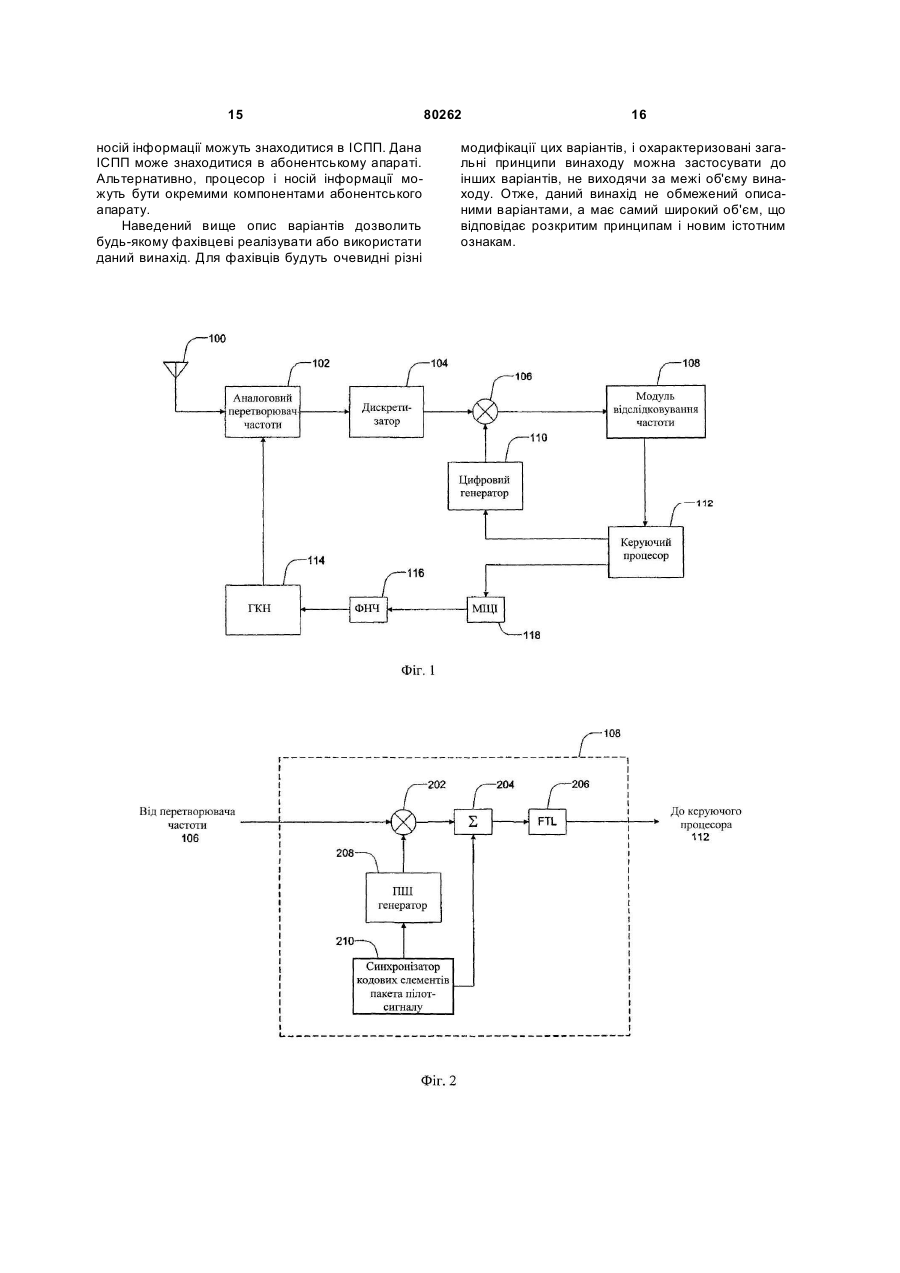
1. Спосіб перетворення зі зниженням частоти прийнятого сигналу, який полягає у тому, що генерують аналоговий сигнал несучої, що має першу частоту, з першого джерела генерації, яке має перший частотний діапазон і перше частотне розрізнення, генерують цифровий сигнал несучої, що має другу частоту, з другого джерела генерації, яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і множать прийнятий сигнал на аналоговий сигнал несучої і цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу. 2. Спосіб за п. 1, який відрізняється тим, що додатково вимірюють залишкову помилку частоти у перетвореному зі зниженням частоти сигналі та коректують другу частоту на основі згаданого вимірювання. 3. Спосіб за п. 1, який відрізняється тим, що додатково підвищують першу частоту на розмір кроку грубої частоти і знижують другу частоту на розмір кроку грубої частоти. 4. Спосіб за п. 1, який відрізняється тим, що додатково знижують першу частоту на розмір кроку 2 (19) 1 3 яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і засіб для множення прийнятого сигналу на аналоговий сигнал несучої та цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу. 10. Пристрій за п. 9, який відрізняється тим, що додатково містить засіб для вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі та засіб для корекції другої частоти на основі згаданого вимірювання. 11. Пристрій за п. 9, який відрізняється тим, що додатково містить засіб для підвищення першої частоти на розмір кроку грубої частоти і засіб для зниження другої частоти на розмір кроку грубої частоти. 12. Пристрій за п. 9, який відрізняється тим, що додатково містить засіб для зниження першої частоти на розмір кроку грубої частоти і засіб для підвищення другої частоти на розмір кроку грубої частоти. 13. Пристрій для перетворення зі зниженням частоти прийнятого сигналу, що містить засіб для генерації аналогового сигналу несучої, що має першу частоту, з першого джерела генерації, яке має перший частотний діапазон і перше частотне розрізнення, засіб для множення прийнятого сигналу на аналоговий сигнал несучої для вироблення скоректованого аналогового сигналу, дискретизатор для дискретизації скоректованого аналогового сигналу для одержання потоку цифрових вибірок, засіб для генерації цифрового сигналу несучої, що має другу частоту, з другого джерела генерації, яке має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і засіб для множення скоректованого аналогового сигналу на цифровий сигнал несучої для вироблення перетвореного зі зниженням частоти сигналу. 14. Пристрій за п. 13, який відрізняється тим, що додатково містить засіб для вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі і засіб для корекції другої частоти на основі згаданого вимірювання. 15. Пристрій за п. 13, який відрізняється тим, що додатково містить засіб для підвищення першої частоти на розмір кроку грубої частоти і засіб для зниження другої частоти на розмір кроку грубої частоти. 16. Пристрій за п. 13, який відрізняється тим, що додатково містить засіб для зниження першої частоти на розмір кроку грубої частоти і засіб для підвищення другої частоти на розмір кроку грубої частоти. 17. Приймальний пристрій, що містить аналоговий генератор, який має перший частотний діапазон і перше частотне розрізнення, для фор 80262 4 мування аналогового сигналу несучої, що має першу частоту, аналоговий перетворювач частоти для множення прийнятого сигналу на аналоговий сигнал несучої для вироблення першого перетвореного зі зниженням частоти сигналу, цифровий генератор, який має другий частотний діапазон і друге частотне розрізнення, для формування цифрового сигналу несучої, що має другу частоту, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, і цифровий перетворювач частоти для множення першого перетвореного зі зниженням частоти сигналу на цифровий сигнал несучої для вироблення другого перетвореного зі зниженням частоти сигналу. 18. Пристрій за п. 17, який відрізняється тим, що додатково містить модуль відслідковування частоти для вимірювання залишкової помилки частоти у другому перетвореному зі зниженням частоти сигналі та керуючий процесор для корекції першої частоти першого сигналу несучої і другої частоти другого сигналу несучої на основі згаданого вимірювання. 19. Пристрій за п. 18, який відрізняється тим, що модуль відслідковування частоти являє собою систему відслідковування частоти. 20. Пристрій за п. 18, який відрізняється тим, що модуль відслідковування частоти являє собою систему відслідковування частоти першого порядку. 21. Пристрій за п. 18, який відрізняється тим, що модуль відслідковування частоти являє собою систему відслідковування частоти другого порядку. 22. Пристрій за п. 17, який відрізняється тим, що цифровий генератор є цифровим обертачем. 23. Пристрій за п. 17, який відрізняється тим, що цифровий генератор є цифровим синтезатором з прямим синтезом частот. 24. Пристрій за п. 17, який відрізняється тим, що аналоговий генератор є генератором, керованим напругою. 25. Пристрій за п. 17, який відрізняється тим, що аналоговий генератор є кварцовим генератором з температурною стабілізацією. 26. Пристрій за п. 17, який відрізняється тим, що додатково містить модулятор щільності імпульсів для формування послідовності імпульсів, який має робочий цикл, що змінюється відповідно до цифрового вхідного сигналу, і фільтр нижніх частот для перетворення послідовності імпульсів у напругу, яка приблизно не змінюється у часі, причому величина напруги, що не змінюється у часі, змінюється відповідно до робочого циклу послідовності імпульсів, і перша частота змінюється відповідно до напруги, що приблизно не змінюється у часі. 27. Пристрій за п. 17, який відрізняється тим, що додатково містить керуючий процесор для корекції першої частоти і другої частоти. 5 80262 6 28. Пристрій за п. 27, який відрізняється тим, що додатково містить машинозчитуваний носій, який зв'язаний зі згаданим керуючим процесором і містить програмний модуль, виконуваний згаданим керуючим процесором, при цьому виконання програмного модуля керуючим процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого згаданим приймальним пристроєм, що включає в себе вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі та корекцію другої частоти на основі згаданого вимірювання. 29. Пристрій за п. 27, який відрізняється тим, що додатково містить машинозчитуваний носій, який зв'язаний зі згаданим керуючим процесором і містить програмний модуль, виконуваний згаданим керуючим процесором, при цьому виконування програмного модуля керуючим процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого згаданим приймальним пристроєм, що включає в себе підвищення першої частоти на розмір кроку грубої частоти і зниження другої частоти на розмір кроку грубої частоти. 30. Пристрій за п. 27, який відрізняється тим, що додатково містить машинозчитуваний носій, який зв'язаний зі згаданим керуючим процесором і містить програмний модуль, виконуваний згаданим керуючим процесором, при цьому виконування програмного модуля керуючим процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого згаданим приймальним пристроєм, що включає в себе зниження першої частоти на розмір кроку грубої частоти і підвищення другої частоти на розмір кроку грубої частоти. 31. Машинозчитуваний носій для зберігання програмного модуля, виконаний з можливістю виконування програмним процесором приймального пристрою, при цьому виконування програмного модуля процесором забезпечує реалізацію способу перетворення зі зниженням частоти сигналу, прийнятого приймальним пристроєм, який включає в себе генерацію сигналу керування першою частотою для керування першою частотою аналогового сигналу несучої на виході аналогового генератора, що має перший частотний діапазон і перше частотне розрізнення, генерацію сигналу керування другою частотою для керування другою частотою цифрового сигналу несучої на виході цифрового генератора, що має другий частотний діапазон і друге частотне розрізнення, причому перший частотний діапазон більший, ніж другий частотний діапазон, а перше частотне розрізнення менше, ніж друге частотне розрізнення, вимірювання залишкової помилки частоти у перетвореному зі зниженням частоти сигналі і корекцію другої частоти на основі згаданого вимірювання. 32. Машинозчитуваний носій за п. 31, який відрізняється тим, що реалізовуваний при виконанні згаданого модуля спосіб додатково включає в себе корекцію сигналу керування першою частотою для підвищення першої частоти на розмір кроку грубої частоти і корекцію сигналу керування другою частотою для зниження другої частоти на розмір кроку грубої частоти. 33. Машинозчитуваний носій за п. 31, який відрізняється тим, що реалізовуваний при виконанні згаданого модуля спосіб додатково включає в себе корекцію сигналу керування першою частотою для зниження першої частоти на розмір кроку грубої частоти і корекцію сигналу керування другою частотою для підвищення другої частоти на розмір кроку грубої частоти. 34. Машинозчитуваний носій за п. 31, який відрізняється тим, що у реалізовуваному при виконанні згаданого модуля способі сигнал керування першою частотою є цифровим сигналом, який подається у модулятор щільності імпульсів згаданого аналогового генератора. 35. Машинозчитуваний носій за п. 31, який відрізняється тим, що у реалізовуваному при виконанні згаданого модуля способі сигнал керування другою частотою є цифровим сигналом, який подається у цифровий обертач згаданого цифрового генератора. 36. Машинозчитуваний носій за п. 31, який відрізняється тим, що у реалізовуваному при виконанні згаданого модуля способі сигнал керування другою частотою є цифровим сигналом, який подається у цифровий синтезатор з прямим синтезом частот згаданого цифрового генератора. Пріоритет даної заявки вимагається на основі попередньої [заявки США №60/337469, поданої 9.11.2001, на винахід "Спосіб і пристрій для узгодження несучої частоти приймача"]. Описані нижче варіанти здійснення винаходу відносяться, загалом, до області безпровідного зв'язку, і більш конкретно, до узгодження частоти прийнятого сигналу несучої у системі рухомого безпровідного зв'язку. По мірі того, як сучасні системи безпровідного зв'язку набувають все більшого поширення, зростає потреба у підвищенні пропускної здатності системи безпровідного зв'язку. Для збільшення кількості абонентів, що обслуговуються, постачальник послуг безпровідного зв'язку може або збільшити частотний спектр, який використовується його системами, або знайти спосіб підтримки більшої кількості абонентів у вже виділеному частотному спектрі. Не маючи можливості одержати додатковий частотний спектр, постачальники послуг безпровідного зв'язку часто повинні шукати шляхи збільшення пропускної здатності без використання додаткового спектра. Іншими словами, постачальники послуг безпровідного зв'язку пови 7 нні знаходити більш ефективні шляхи для використання спектра, що є у них. У відповідь на потребу у більш ефективному використанні спектра виробники безпровідного обладнання розробляють різні методи збільшення пропускної здатності систем безпровідного зв'язку. Одним зі шляхів забезпечення ефективної передачі мовлення і даних є використання методів багатостанційного доступу з кодовим розділенням каналів (БДКР). Було розроблено декілька стандартів застосування методів БДКР для наземних безпровідних систем передачі мовлення і даних. Можна, наприклад, назвати такі стандарти, як "TIA/EIA/IS-95 - Стандарт сумісності рухомої станції з базовою станцією для дворежимної широкосмугової стільникової системи зв'язку з розширенням спектра", що іменується надалі як IS-95, а також стандарт "TIA/EIA/IS-2000", що іменується надалі як БДКР2000. Пропонувалися також й інші стандарти для систем безпровідного зв'язку, які оптимізовані на надання високошвидкісної безпровідної передачі даних. Прикладом стандартів для високошвидкісної передачі даних є стандарт "TIA/EIA/IS-856", що іменується надалі як ВПД (високошвидкісна передача даних). У системі з ВПД швидкість, з якою абонентський апарат може одержувати дані, може бути обмежена якістю сигналів, що приймаються абонентським апаратом. У такій системі швидкість передачі даних у сигналах, що надсилаються абонентському апарату, визначається на основі вимірювань якості сигналів, що приймаються, які виконуються на абонентському апараті. Одним з видів вимірювання якості, що використовується для визначення швидкості передачі даних, є визначення співвідношення потужності несучої до рівня перешкоди (Н/П) у прийнятому сигналі. Якщо прийнятий сигнал має високу потужність у порівнянні з потужністю сигналу перешкоди, то значення Н/П буде високим. Якщо ж прийнятий сигнал несучої має слабку потужність у порівнянні з перешкодою, то Н/П буде низьким. При високому значенні Н/П абонентський апарат може приймати більше даних за даний період часу. При низькому співвідношенні Н/П швидкість даних, які надсилаються абонентському апарату, зменшується, щоб зберегти прийнятну частоту помилок у кадрах. Відновлення несучої частоти є одним з аспектів проектування абонентського апарату, який може істотно впливати на Н/П, що сприймається абонентським апаратом. Під відновленням несучої частоти мається на увазі генерація в абонентському апараті сигналу опорної несучої, яка має ту ж саму частоту, що і сигнал несучої, одержаний з базової станції. Абонентський апарат використовує сигнал опорної несучої для демодуляції сигналів даних, що приймаються з базової станції. Неузгодження між сигналом опорної несучої і прийнятим сигналом несучої, що називається неузгодженням несучої частоти, знижує ефективність процесу демодуляції. Абонентський апарат сприймає таку знижену ефективність демодуляції як зменшення Н/П. Отже, неузгодження несучої частоти зменшує швидкість, з якою можуть надсилатися дані в абонентський апарат. 80262 8 Нарівні з потребою у точному відновленні несучої частоти існує бажання знизити вартість апаратних засобів в абонентському апараті. Ринок абонентського обладнання, такого як радіотелефони і модеми, існує в умовах жорсткої конкуренції і часто характеризується низькими розмірами прибутку, а іноді навіть дотаціями з боку постачальників послуг зв'язку. Тому існує потреба у методах, які б дозволяли підвищити точність відновлення несучої частоти в абонентському обладнанні без істотного дорожчання апаратних засобів. Наведені нижче варіанти здійснення винаходу дозволяють задовольнити згадані вище потреби за допомогою розділення задачі відновлення несучої частоти на декілька рівнів з різним розрізненням. Відповідно до одного зразкового аспекту винаходу, абонентський апарат слідкує за частотою сигналів, що приймаються з базової станції. Базова станція часто використовує дуже точне джерело частоти, наприклад, приймач сигналів системи глобального позиціонування (GPS), що дозволяє використовувати більш прості і дешеві джерела частоти в абонентському апараті. Зразковий абонентський апарат має засіб для генерації сигналу помилки, що показує різницю між частотою прийнятої несучої і частотою локально генерованої опорної несучої. Цей сигнал помилки використовується для корекції частоти опорної несучої доти, доки вона не співпаде з частотою прийнятої несучої. В одному зразковому аспекті опорну несучу генерують при використанні двох рівнів: на першому рівні генерують несучу, яка має широкий частотний діапазон, але низьке частотне розрізнення, а на другій стадії несуча має більш вузький діапазон, але більш високе частотне розрізнення. При такому аспекті перший рівень реалізовується аналоговим пристроєм, таким як генератор, керований напругою, а другий рівень реалізовується цифровим пристроєм, таким як цифровий генератор. Частота сигналу, сформованого на першому рівні, може коректуватися таким чином, щоб частоту сигналу, сформованого на другому рівні, можна було утримувати у заданому частотному діапазоні. Слово "зразковий" у даному контексті означає "такий, що служить як приклад або ілюстрація". Будь-який варіант здійснення винаходу, описаний як "зразковий варіант", не треба вважати переважним або таким, що володіє перевагами, відносно інших варіантів. Короткий опис креслень Фіг.1 - багатоступінчастий пристрій для відновлення несучої частоти, Фіг.2 - пристрій модуля відслідковування частоти і Фіг.3 - алгоритм, що ілюструє спосіб корекції перетворених зі зниженням частоти сигналів у багатоступінчастій системі відновлення несучої частоти. Абонентський апарат, що згадується у даному контексті, може бути мобільним або стаціонарним і може здійснювати зв'язок з однією або декількома базовими станціями. Абонентський апарат пере 9 дає і приймає пакети даних через одну або декілька базових станцій. Базові станції називаються приймачами-передавачами пула модемів. Кожний приймач-передавач пула модемів може бути підключений до контролера ВПД базової станції, який називається контролером пула модемів (КПМ). Приймачі-передавачі пула модемів і контролери пула модемів є частинами мережі, яка називається мережею доступу. Взаємопов'язані вузли мережі доступу звичайно здійснюють зв'язок один з одним за допомогою стаціонарних наземних з'єднань, таких як з'єднання типу ТІ. Мережа доступу пересилає пакети даних між множиною абонентських апаратів. Мережа доступу може бути також підключена до додаткових мереж поза даною мережею доступу, таких як корпоративна локальна мережа або Інтернет, і може пересилати пакети даних між кожним абонентським апаратом і такими зовнішніми мережами. Абонентський апарат, що встановив активне з'єднання по каналу трафіку з одним або більше приймачами-передавачами пула модемів, називається активним абонентським апаратом і вважається таким, що знаходиться у стані трафіку. Абонентський апарат, що знаходиться у процесі встановлення активного з'єднання по каналу трафіку з одним або більше приймачами-передавачами пула модемів, вважається таким, що знаходиться у стані встановлення з'єднання. Абонентським апаратом може бути будьякий пристрій для передачі даних, який здійснює зв'язок по безпровідному каналу або провідному каналу, наприклад, з використанням оптоволоконних або коаксіальних кабелів. Абонентським апаратом може також бути будь-який з ряду пристроїв, що включає в себе, без обмеження перерахованим, PC карту, компакт флеш, зовнішній або внутрішній модем, або безпровідний або провідний телефонний апарат. Лінія зв'язку, по якій абонентський апарат надсилає сигнали у приймач-передавач пула модемів, називається зворотною лінією зв'язку. Лінія зв'язку, по якій приймачпередавач пула модемів надсилає сигнали абонентському апарату, називається прямою лінією зв'язку. На Фіг.1 зображена структурна схема зразкового варіанту багатоступінчастого пристрою для відновлення несучої частоти. У показаному варіанті відновлення несучої частоти ділиться на два рівні, на одному використовується джерело 114 аналогового сигналу несучої, а на іншому - джерело 110 цифрового сигналу несучої. Можливий варіант з використанням більш ніж двох рівнів або інших комбінацій аналогових і цифрових рівнів. Сигнал приймається антеною 100 і змішується з аналоговим сигналом несучої в аналоговому перетворювачі 102 частоти. Аналоговий сигнал несучої виробляється джерелом сигналу змінної частоти, таким як генератор, керований напругою, (ГКН) 114. Частота сигналу несучої, сформованого ГКН 114, змінюється в залежності від вхідної напруги. Вхідна напруга базується на цифровому керуючому сигналі, що подається керуючим процесором 112. У показаному зразковому варіанті цифровий керуючий сигнал перетворюється у вхідну напругу у ГКН 114 з використанням модулято 80262 10 ра щільності імпульсів (МЩІ) 118 і фільтра нижніх частот (ФНЧ) 116. МЩІ 118 приймає цифрове значення з керуючого процесора 112 і видає послідовність імпульсів, що мають робочий цикл, який базується на даному цифровому значенні. ФНЧ 116 може бути простим RC-ланцюгом, або інтегратором, або будь-якою еквівалентною схемою. ФНЧ 116 перетворює послідовність імпульсів з виходу МЩІ 118 у напругу постійного струму, яка визначає частоту сигналу несучої на виході ГКН 114. В альтернативному варіанті МЩІ 118 і ФНЧ 116 замінені простим цифро-аналоговим перетворювачем (ЦАП). Розрізнення коректувань напруги, які можна здійснювати на вході ГКН 114, відносне низьке. Іншими словами, зміна молодшого розряду у цифровому значенні, що надходить з керуючого процесора 112 у МЩІ 118, може викликати відносно велику зміну частоти сигналу несучої на виході ГКН 114. Таким чином, керуючий процесор 112 звичайно не може забезпечити узгодження сигналу несучої на виході ГКН 114 з несучою частотою сигналу, прийнятого з антени 100. Навіть якщо ФНЧ 116 і МЩІ 118 замінити на ЦАП з високим розрізненням, аналоговий шум на вході ГКН 114 зробить точну настройку вихідної частоти ГКН дуже неточною. Через очікуване неузгодження частоти між виходом ГКН 114 і несучою частотою сигналу, прийнятого з антени 100, вихідний сигнал аналогового перетворювача частоти 102 не є чистим сигналом смуги модулюючих сигналів (базової смуги). Іншими словами, вихідний сигнал аналогового перетворювача частоти 102 буде у загальному випадку зберігати низькочастотну компоненту несучої. У проілюстрованому прикладі залишкова низькочастотна несуча виділяється з необхідного сигналу базової смуги у цифровій ділянці. Тому вихідний сигнал аналогового перетворювача 102 частоти піддається цифровій дискретизації у дискретизаторі 104 і змішується з низькочастотною цифровою несучою у цифровому перетворювачі 106 частоти. Вихідний сигнал цифрового перетворювача 106 частоти є перетвореним зі зниженням частоти сигналом базової смуги, який подається у такі відомі декодувальні схеми, як фільтри, пристрої згортки ПШ сигналу і/або послідовностей Уолша, пристрої оберненого перемежування і декодери. Цифровий генератор 110 генерує низькочастотну цифрову несучу. Частоту несучої, генерованої у цифровому генераторі 110, можна коректувати з більш високим розрізненням, ніж частоту несучої, генерованої ГКН 114, хоча ГКН 114 можна коректувати у більш широкому діапазоні частот. Наприклад, ГКН 114 може виробляти сигнали у частотному діапазоні +/- 45 мегагерц кроками по 30 герц, а цифровий генератор 110 може формувати сигнали з довільно високим розрізненням і частотним діапазоном, обмеженим тільки частотою дискретизації аналого-цифрового перетворювача. Фахівцям повинно бути зрозуміло, що очевидні варіанти використання інших комбінацій цифрових і аналогових генераторів частоти і перетворювачів частоти є альтернативними варіа 11 нтами описаного вище варіанту здійснення винаходу. В одному зразковому варіанті цифровий генератор 110 є цифровим обертачем, здатним генерувати сигнали корекції частоти і фази з високим розрізненням. За допомогою збільшення кількості біт, що використовуються для представлення частотного і фазового входів, можна легко сконструювати цифровий обертач з більш високим частотним і фазовим розрізненням. В альтернативному варіанті цифровий генератор 110 є цифровим синтезатором з прямим синтезом частот (СПС). Цифровий генератор 110 може також бути будь-яким іншим типом цифрового генератора опорної частоти. ГКН 114 може бути будь-яким з ряду керованих напругою генераторів, включаючи кварцовий генератор з температурною стабілізацією (КГТС) або термостатований кварцовий генератор (ТСКГ). Модуль 108 відслідковування частоти вимірює залишкову помилку частоти у вихідному сигналі цифрового перетворювача частоти 106 і формує, щонайменше, один сигнал помилки, який подається у керуючий процесор 112. Керуючий процесор 112 використовує цей, щонайменше, один сигнал помилки з модуля 108 відслідковування частоти для корекції керуючих сигналів, що подаються у цифровий генератор 110 і МЩІ 118. Вносячи зміну у керуючий сигнал, що подається у МЩІ 118, керівний процесор 112 змінює частоту сигналу на виході ГКН 114. В одному зразковому варіанті здійснення винаходу керуючий процесор 112 регулює вихідну частоту ГКН 114 так, що необхідна залишкова корекція частоти знаходиться у заданому оптимальному або робочому діапазоні цифрового генератора 110. Наприклад, навіть якщо цифровий генератор 110 здатний генерувати частоти у смузі шириною декілька мегагерц, ГКН 114 коректується таким чином, щоб частота цифрового генератора 110 могла утримуватися у діапазоні шириною 128 герц. Крім того, може бути необхідно зберігати опорну частоту ГКН відносно близькою до несучої частоти прийнятого сигналу. Корекція частоти ГКН 114, щоб вона була як можна ближче до прийнятої несучої частоти, приведе до зменшення частоти сигналу на виході цифрового генератора 110. Крім того, для збереження роботи цифрового генератора 110 в оптимальному або робочому частотному діапазоні керуючий процесор 112 підвищує частоту ГКН 114 і знижує частоту цифрового генератора 110. І навпаки, якщо це необхідно, керуючий процесор 112 знижує частоту ГКН 114 і підвищує частоту цифрового генератора 110. В одному зразковому варіанті здійснення винаходу керуючий процесор 112 коректує грубу частоту кроками однакової частоти шляхом зміни цифрового керуючого сигналу, що подається у МЩІ 118. Наприклад, якщо МЩІ має розрізнення 30Гц на біт, то керуючий процесор 112 може підвищувати керуючий сигнал МЩІ на 30, 60 або 90Гц шляхом зміни цифрового вхідного значення МЩІ в 1, 2 або 3 рази. У той же час керуючий процесор 112 коректує керуючий сигнал, що надсилається у цифровий генератор 110, таким чином, що вихідна частота цифрового генератора 110 зменшується 80262 12 на 30, 60 або 90Гц. Через низьке розрізнення вихідного сигналу ГКН 114 розмір кроку частоти для ГКН 114 можна тільки оцінити. І навпаки, розмір кроку частоти цифрового генератора 110 дуже точний. Отже, навіть після корекції частоти цифрового генератора 110 для компенсації крокової зміни частоти ГКН 114 цифровий генератор 110 повинен піддатися додатковій корекції, перш ніж вихідний сигнал цифрового перетворювача частоти 106 буде мати частоту і фазу, найбільш узгоджені з частотою і фазою прийнятого сигналу несучої. На Фіг.2 показана більш детальна схема варіанта модуля 108 відслідковування частоти, придатного для використання у системі ВПД. В одному зразковому варіанті приймач використовує виключно сигнали, одержані у двох пакетах пілотсигналу, прийнятих у кожному часовому інтервалі (далі "тайм-слот"). Наприклад, у системі ВПД кожний такий часовий інтервал має тривалість 1,667 мілісекунд, при цьому один пакет пілот-сигналу центрований у кожній половині тайм-слота. Іншими словами, кожним тайм-слот має перший пакет пілот-сигналу, центрований на 417 мілісекундах від початку тайм-слота, і другий пакет пілотсигналу, центрований на 1,25 мілісекундах від початку кадру. У системі ВПД кожний пакет пілотсигналу має тривалість 96 кодових елементів сигналу при частоті передачі кодових елементів, що дорівнює 1,2288 мегагерц. Перед передачею сигнали пакету пілот-сигналу множаться на псевдошумову (ПШ) послідовність. Модуль 108 відслідковування частоти, показаний на Фіг.2, служить для видалення ПШ компонента з перетвореного зі зниженням частоти сигналу базової смуги, одержаного з цифрового перетворювача частоти 106, і нагромаджує частину сигналу, прийнятого у пакетах пілот-сигналу. Синхронізатор 210 кодових елементів пакету пілот-сигналу генерує синхросигнали під час пакетів пілот-сигналу кожного прийнятого тайм-слота. Синхросигнали подаються у генератор ПШ 208, який потім генерує ПШ сигнал, що має таку ж частоту синхронізації, як і синхронізатор 210 кодових елементів пакету пілот-сигналу. Потім цей ПШ сигнал змішується з перетвореним зі зниженням частоти сигналом базової смуги у цифровому 202 перетворювачі частоти для одержання ПШ згорненого пілот-сигналу. ПШ згорнений пілот-сигнал потім нагромаджується протягом періоду пакету пілот-сигналу у нагромаджуючому суматорі 204. Вихідний сигнал нагромаджуючого суматора 204 буде сигналом фазової помилки, який відповідає фазовій помилці тепер вже повністю демодульованого пілот-сигналу. Цей сигнал фазової помилки потім подається у систему 108 відслідковування частоти (СВЧ), яка перетворює сигнал фазової помилки у цифровий сигнал, який може використовуватися керуючим процесором 112. Фахівцям повинно бути зрозуміло, що СВЧ 108 може бути системою першого порядку, системою другого порядку або іншою конфігурацією СВЧ. В одному зразковому варіанті здійснення винаходу модуль 108 відслідковування частоти виробляє одну оцінку фазової помилки на тайм-слот, 13 використовуючи два періоди пакетів пілот-сигналу у тайм-слоті. В альтернативному варіанті модуль 108 відслідковування частоти виробляє більше однієї оцінки фазової помилки на тайм-слот. Наприклад, модуль 108 відслідковування частоти може виробляти одну оцінку фазової помилки для кожного періоду половини пакету пілот-сигналу, що дає в результаті чотири оцінки фазової помилки. Дані оцінки фазової помилки потім можна використовувати для оцінки швидкості зміни фази, а значить і залишкової помилки частоти у сигналі базової смуги. Через менший період дискретизації, що використовується для вироблення оцінки фазової помилки, вимірювання фазової помилки на основі половини пакету пілот-сигналу містять більше шуму, ніж одна оцінка, вироблена на двох періодах пакету пілот-сигналу. В іншому альтернативному варіанті одна оцінка фазової помилки виробляється для кожного періоду пакету пілотсигналу в тайм-слоті, що дає в результаті дві оцінки фазової помилки. В іншому альтернативному варіанті одну оцінку фазової помилки виробляють з використанням періодів пакету пілот-сигналу у більш ніж одному тайм-слоті. Через проблеми накладення спектрів вибір кількості оцінок фазової помилки на якусь кількість тайм-слотів являє собою компроміс між шумом сигналу і розміром помилки частоти, яку можна виявити. В альтернативному варіанті модуль 108 відслідковування частоти можна конфігурувати керуючим процесором 112 у реальному часі для роботи у будь-якому з декількох режимів, в кожному з яких використовується різне співвідношення оцінок фазової помилки до тайм-слотів. У системі ВПД пілот-сигнал розширений за допомогою коду "всі одиниці", тому немає необхідності у наявності пристрою згортки Уолша між цифровим перетворювачем 202 частоти та інтегратором 204. В одному зразковому варіанті здійснення винаходу ПШ генератор 208 генерує комплексний ПШ код, а цифровий перетворювач 202 частоти є комплексним помножувачем. Комплексний вихідний сигнал цифрового перетворювача 202 частоти нагромаджується у нагромаджуючому суматорі 204 таким чином, щоб фазова інформація зберігалася у дійсній та уявній частинах накопиченого значення. На Фіг.3 представлений алгоритм виконання зразкового способу корекції частот знижувального перетворення у багатоступінчастій системі відновлення несучої частоти, показаній на Фіг.1. Під час роботи системи відновлення несучої частоти на етапі 302 контролюють точне значення частоти Ff, щоб визначити, коли система працює в оптимальному або робочому частотному діапазоні джерела генерації точної частоти, такого як цифровий генератор 110, показаний на Фіг.1. На етапі 304 перевіряють точне значення частоти Ff, щоб визначити, чи потрібно коректувати грубу вихідну частоту джерела генерації грубої частоти, такого як ГКН 114, показаний на Фіг.2. Якщо корекція потрібна, то на етапі 306 коректуються обидві частоти - Ff і Fc. Якщо корекція не потрібна, то етап 306 корекції пропускається. Якщо на етапі 306 Ff збільшується, то Fc зменшується приблизно на таку ж величину. 80262 14 Якщо Ff зменшується, то Fc збільшується приблизно на таку ж величину. Фахівцям повинно бути зрозуміло, що інформацію і сигнали можна представити з використанням будь-якого з ряду інших методів і технологій. Наприклад, дані, інструкції, команди, інформацію, сигнали, біти, символи і кодові елементи, які могли згадуватися вище, можна представити у вигляді напруг, струмів, електромагнітних хвиль, магнітних полів або частинок, оптичних полів або частинок або будь-якої їх комбінації. Фахівцям також повинно бути зрозуміло, що різні ілюстративні логічні блоки, модулі, схеми і операції алгоритму, описані у зв'язку з розкритими варіантами, можна реалізувати в електронному обладнанні, комп'ютерних програмах або їх комбінаціях. Щоб чітко показати таку взаємозамінність апаратних і програмних засобів, різні ілюстративні компоненти, блоки, модулі, схеми і операції були описані вище на основі їх функціонального призначення. Реалізація даних функцій в апаратному або програмному вигляді залежить від конкретного застосування і конструктивних обмежень, що накладаються на систему загалом. Досвідчені фахівці зможуть реалізувати описані вище функції різними шляхами для кожного конкретного застосування, але дані вирішення не треба вважати такими, що виходять за межі об'єму даного винаходу. Різні ілюстративні логічні блоки, модулі і схеми, описані у зв'язку з розкритими варіантами здійснення винаходу, можна реалізувати або виконати за допомогою універсального процесора, процесора цифрових сигналів (ПЦС), інтегральної схеми прикладного призначення (ІСПН), вентильної матриці, що програмується в умовах експлуатації (ВМПЕ), або іншого логічного пристрою, що програмується, окремої вентильної або транзисторної логічної схеми, окремих апаратних компонентів або будь-якої їх комбінації, призначеної для виконання описаних функцій. Універсальний процесор може бути мікропроцесором, але альтернативно цей процесор може бути будь-яким звичайним процесором, контролером, мікроконтролером або кінцевим автоматом. Процесор, такий як керуючий процесор 112, описаний вище, можна також реалізувати у вигляді комбінації обчислювальних пристроїв, наприклад, комбінації ПЦС і мікропроцесора, множини мікропроцесорів, одного або більше мікропроцесорів разом з ядром ПЦС, або будь-якої такої конфігурації. Операції способу або алгоритму, описаного у зв'язку з розкритими варіантами здійснення винаходу, можна реалізувати безпосередньо в апаратних засобах, у програмному модулі, що виконується процесором, або в їх комбінації. Програмний модуль може постійно знаходитися у пам'яті ОЗП, флеш-пам'яті, пам'яті ПЗП, пам'яті ЕППЗП, пам'яті ППЗП, регістрах, на жорсткому диску, змінному диску, CD-ROM, або на будь-якій іншій відомій формі носія інформації. Зразковий носій інформації підключається до процесора таким чином, щоб процесор міг зчитувати і записувати на нього інформацію. Альтернативно, носій інформації може бути вбудований у процесор. Такий процесор і 15 носій інформації можуть знаходитися в ІСПП. Дана ІСПП може знаходитися в абонентському апараті. Альтернативно, процесор і носій інформації можуть бути окремими компонентами абонентського апарату. Наведений вище опис варіантів дозволить будь-якому фахівцеві реалізувати або використати даний винахід. Для фахівців будуть очевидні різні 80262 16 модифікації цих варіантів, і охарактеризовані загальні принципи винаходу можна застосувати до інших варіантів, не виходячи за межі об'єму винаходу. Отже, даний винахід не обмежений описаними варіантами, а має самий широкий об'єм, що відповідає розкритим принципам і новим істотним ознакам. 17 Комп’ютерна верстка В. Клюкін 80262 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod (variants) and apparatus (variants) for transformation with reducing frequency of received signal, receiving device and machine-readable carrier for saving programm module for implementation of the method
Автори англійськоюFernandes-Korbaton Ivan Jesus, Smi John, Jayaraman Srikant
Назва патенту російськоюСпособ (варианты) и устройство (варианты) для преобразования частоты принятого сигнала, приемное устройство и машиносчитывающий носитель для сохранения программного модуля для реализации способа
Автори російськоюФернандес-Корбатон Иван Хесус, Сми Джон, Джаяраман Срикант
МПК / Мітки
МПК: H04L 27/00, H03D 7/00, H04B 1/707
Мітки: зниженням, способу, носій, частоти, перетворення, пристрій, машинозчитуваний, програмного, прийнятого, сигналу, спосіб, варіанти, приймальний, реалізації, модуля, зберігання
Код посилання
<a href="https://ua.patents.su/9-80262-sposib-varianti-ta-pristrijj-varianti-dlya-peretvorennya-zi-znizhennyam-chastoti-prijjnyatogo-signalu-prijjmalnijj-pristrijj-ta-mashinozchituvanijj-nosijj-dlya-zberigannya-programn.html" target="_blank" rel="follow" title="База патентів України">Спосіб (варіанти) та пристрій (варіанти) для перетворення зі зниженням частоти прийнятого сигналу, приймальний пристрій та машинозчитуваний носій для зберігання програмного модуля для реалізації способу</a>
Приймальний вузол системи безпровідного зв’язку (варіанти) та спосіб обробки прийнятого сигналу у такій системі
Номер патенту: 74397
Опубліковано: 15.12.2005
Автори: Істон Кеннет Д., Блек Пітер Дж.
МПК: H04B 7/00, H04Q 7/00, H04B 1/707
Мітки: безпровідного, зв'язку, обробки, приймальний, такій, прийнятого, спосіб, системі, сигналу, варіанти, вузол
Формула / Реферат:
1. Приймальний вузол системи безпровідного зв'язку, який включає:- перший буфер, призначений оперативно приймати і зберігати оцифровані зразки, що мають численні екземпляри прийнятого сигналу, і- процесор даних, з'єднаний з першим буфером і призначений оперативно добувати різні сегменти оцифрованих зразків з першого буфера, і кожний добутий сегмент має один з екземплярів сигналу, причому процесор даних крім того призначений...
Спосіб вимірювання у пацієнта хвилинного серцевого викиду та пристрій, система і машинозчитуваний носій для здійснення способу
Номер патенту: 73941
Опубліковано: 17.10.2005
Автор: Романо Сальваторе
МПК: A61B 5/029
Мітки: здійснення, хвилинного, вимірювання, машинозчитуваний, спосіб, носій, способу, система, пристрій, пацієнта, викиду, серцевого
Формула / Реферат:
1. Спосіб вимірювання у пацієнта хвилинного серцевого викиду, що полягає у:- вимірюванні артеріального кров'яного тиску і перетворенні виміряного артеріального кров'яного тиску у сигнал тиску,- визначенні оцінки ударного об'єму серця як функції вибраних характеристик одержаного сигналу тиску і заздалегідь визначених у хворого неспецифічних констант і- визначенні оцінки хвилинного серцевого викиду як функції оціненого...
Спосіб перетворення частоти лазерного випромінювання та пристрій для його реалізації
Номер патенту: 77437
Опубліковано: 15.12.2006
Автори: Неєжмаков Павло Іванович, Кравченко Микола Іванович
Мітки: спосіб, частоти, пристрій, реалізації, випромінювання, лазерного, перетворення
Формула / Реферат:
1. Спосіб перетворення частоти лазерного випромінювання, який полягає в тому, що перетворюють за допомогою квантового фотоприймача лазерне випромінювання в електричний сигнал, збуджують мікрохвильові коливання в резонаторі за частотою задавального генератора, який відрізняється тим, що збудження мікрохвильових коливань в резонаторі здійснюють в режимі балансу фаз і амплітуд, а частоту задавального генератора синхронізують за частотою...
Пристрій для регулювання та перевірки блока посилення і перетворення частоти сигналу станції радіотехнічного контролю
Номер патенту: 5952
Опубліковано: 15.03.2005
Автори: РЕПКІН ОЛЕКСАНДР ІВАНОВИЧ, Перегудов Володимир Олександрович, Гришко Микола Мефодійович, Демченко Василь Дмитрович, Булгаков Олег Анатолійович, Силка Олександр Іванович, Смородін Микола Максимович, ШЕСТАКОВ ОЛЕКСАНДР ОЛЕКСІЙОВИЧ, Гіоргобіані Володимир Галактіонович, Передерій Людмила Василівна, Сергієнко В'ячеслав Петрович, Збиковський Валерій Миколайович
МПК: G01R 31/28, G01R 29/00
Мітки: станції, сигналу, радіотехнічного, посилення, блока, перевірки, регулювання, частоти, пристрій, контролю, перетворення
Формула / Реферат:
Пристрій для регулювання та перевірки блока посилення і перетворення частоти (БППЧ) сигналу станції радіотехнічного контролю, що складається з комутаційного вузла для підключення необхідних джерел живлення, генераторів ВЧ, осцилографа, частотоміра і блока, що перевіряється, який відрізняється тим, що до його складу додатково введені: пристрій керування, підсилювач логарифмічний, входи яких з'єднані з комутаційним вузлом, два перетворювачі,...
Пристрій (варіанти) та спосіб (варіанти) кодування цифрового інформаційного сигналу та носій запису
Номер патенту: 74323
Опубліковано: 15.12.2005
Автори: Рійнберг Адріаан Дж., Брюкерс Альфонс Антоніус Марія Ламбертус
МПК: G10L 19/00, H03M 7/30, G11B 20/00
Мітки: сигналу, кодування, інформаційного, варіанти, цифрового, запису, спосіб, пристрій, носій
Формула / Реферат:
1. Пристрій для кодування цифрового інформаційного сигналу, такого як цифровий аудіосигнал, де - ціле число, більше за 1, який включає в себе:засіб уведення, для прийому згаданого цифрового інформаційного сигналу,кодувальний засіб, для кодування згаданого цифрового інформаційного сигналу...
Попередній патент: Горілка особлива “перлова апельсинова”
Наступний патент: Спосіб роботи прямоструминного котла при часткових навантаженнях
Випадковий патент: Суміш для легування сталі марганцем