Паркувальний модуль
Формула / Реферат
1. Паркувальний модуль, який містить вертикальну шахту, бокси, розташовані з обох сторін вертикальної шахти, піднімальну платформу, встановлену у вертикальній шахті з можливістю переміщення у вертикальному напрямку, механізм вертикального переміщення піднімальної платформи, візки, встановлені в боксах і виконані з можливістю горизонтального переміщення з боксів на піднімальну платформу і з піднімальної платформи в бокси, систему керування, зв'язану з механізмом вертикального переміщення піднімальної платформи і візками, який відрізняється тим, що на кожному візку встановлений автономний привід горизонтального переміщення візка, який включає акумуляторну батарею, двигун, редуктор і вихідну шестірню, виконану з можливістю зачеплення з рейкою, встановленою в боксі, і з рейкою, встановленою на піднімальній платформі.
2. Паркувальний модуль за п. 1, який відрізняється тим, що кожен візок оснащений пристроєм заряду акумуляторної батареї автономного приводу горизонтального переміщення, який виконано з можливістю підключення до стаціонарної електричної мережі при перебуванні візка в боксі.
3. Паркувальний модуль за п. 1, який відрізняється тим, що кожен візок оснащений опорними роликами, які виконано з можливістю переміщення по напрямних, встановлених у боксі, і по напрямних, встановлених на піднімальній платформі.
4. Паркувальний модуль за п. 1, який відрізняється тим, що система керування складається з датчиків положення візка, які знаходяться в кожному боксі і на піднімальній платформі, лічильника обертів механізму вертикального переміщення піднімальної платформи, мікропроцесорного блока, блока керування приводом механізму вертикального переміщення піднімальної платформи, системи керування приводом горизонтального переміщення візка і порту передачі даних.
5. Паркувальний модуль за п. 4, який відрізняється тим, що система керування приводом горизонтального переміщення візка складається з датчика положення візка і датчика навантаження, які знаходяться на візку, мікропроцесорного блока, блока керування і порту передачі даних.
Текст
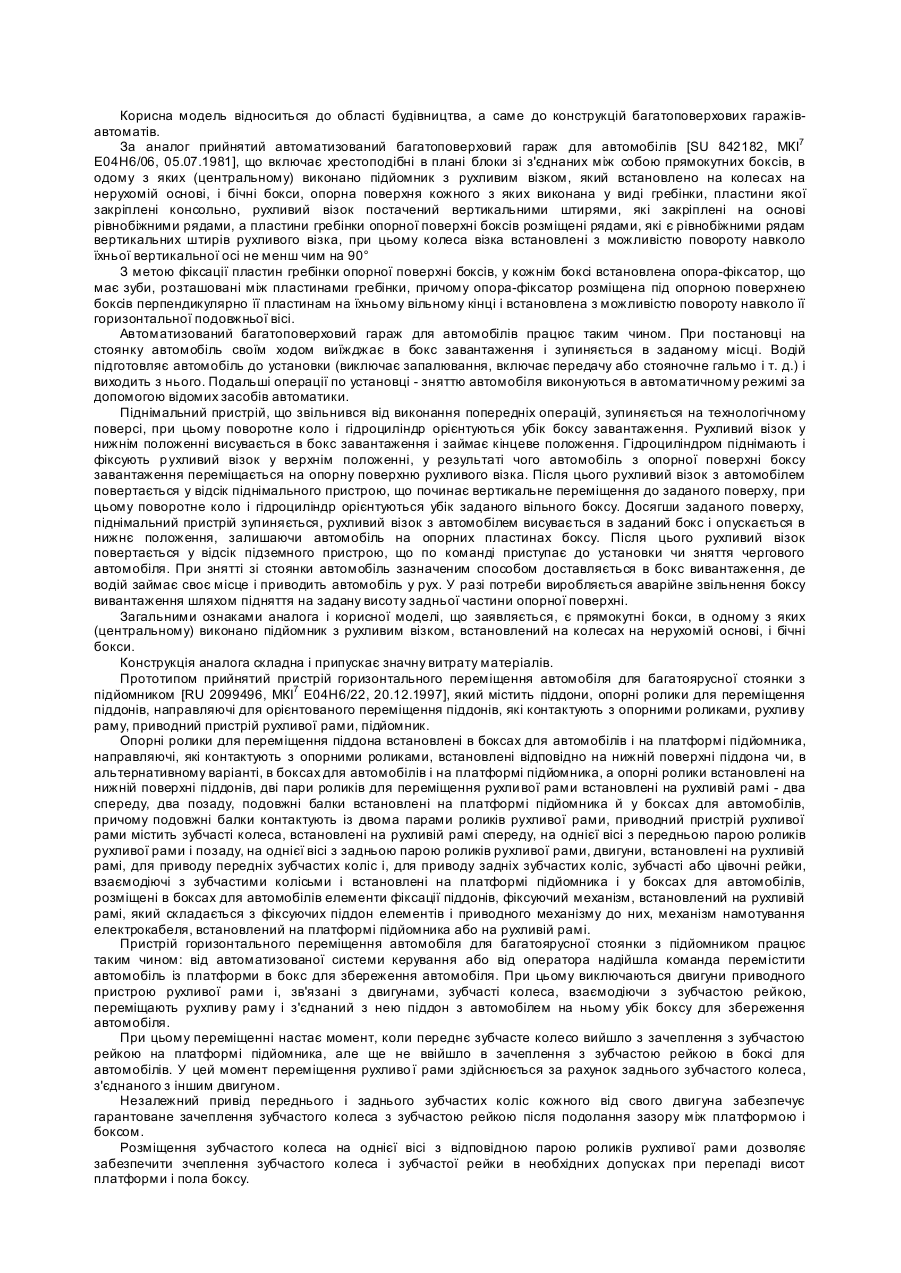
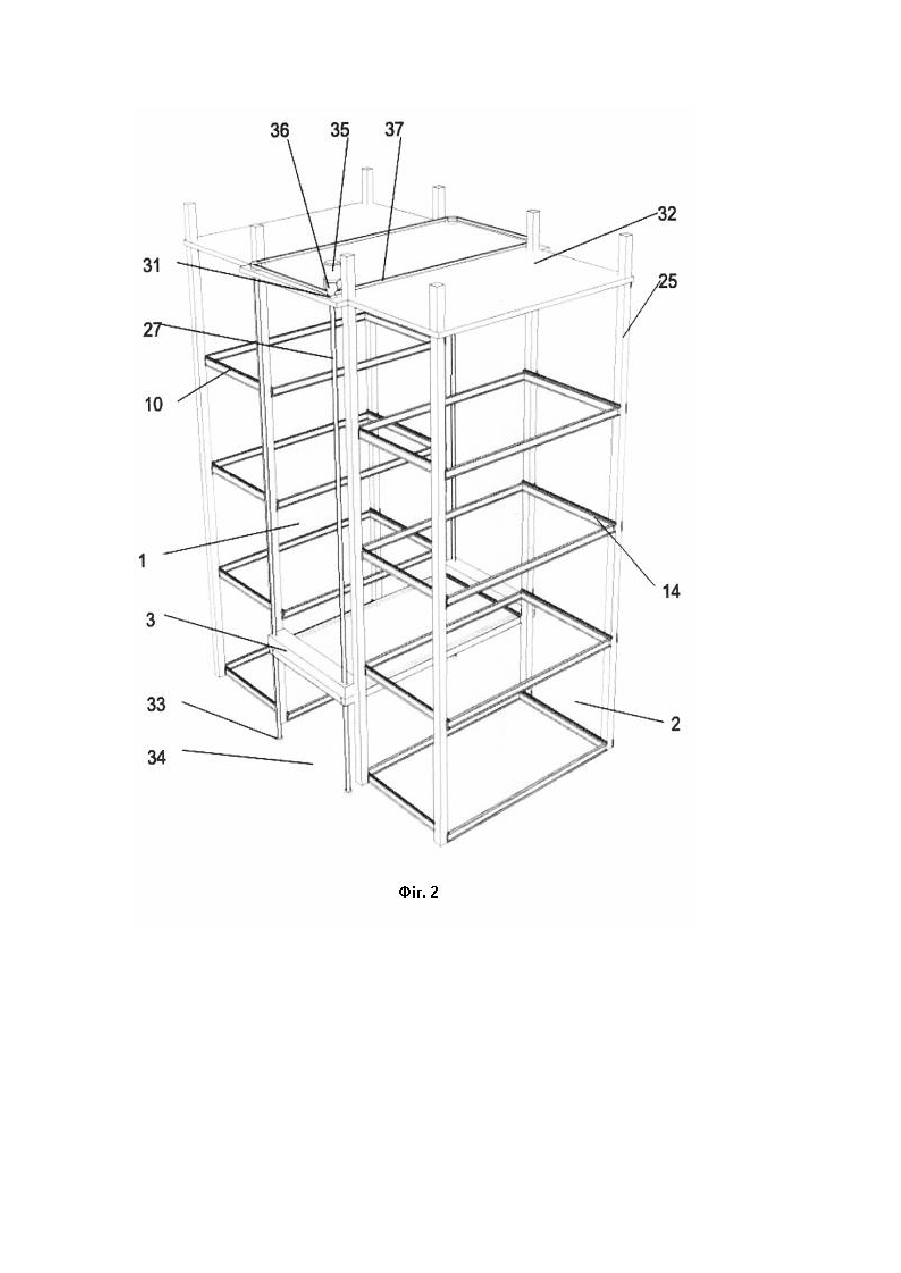
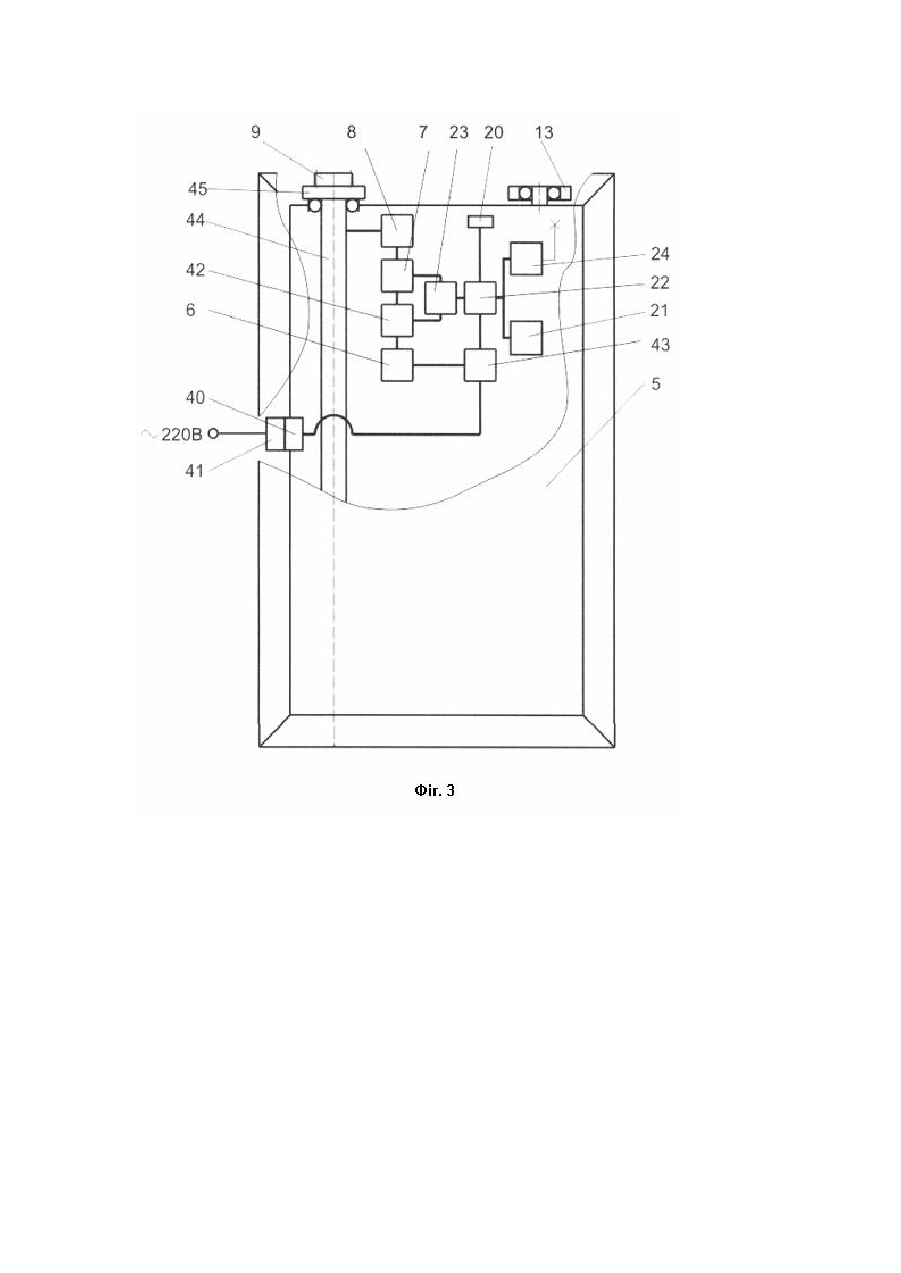
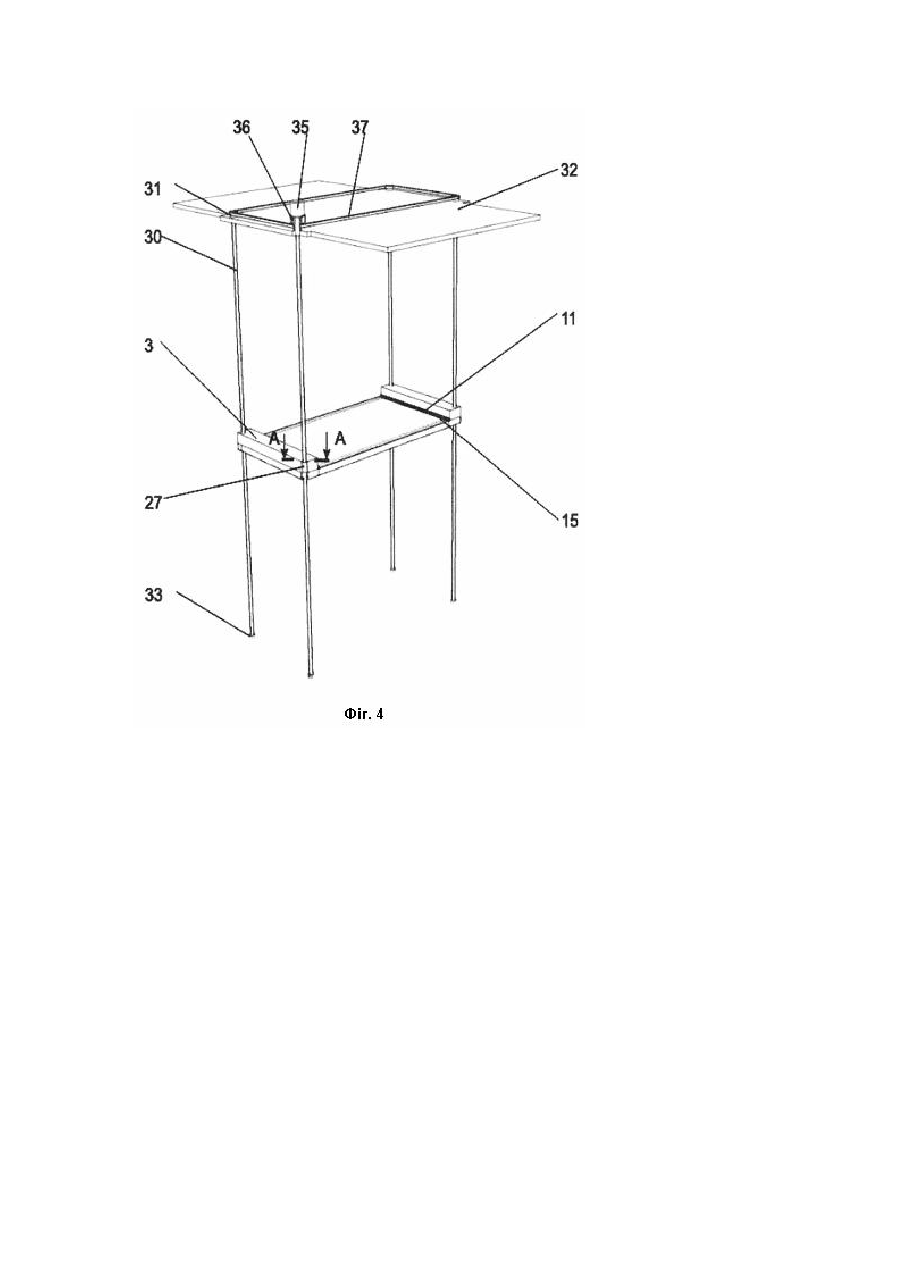
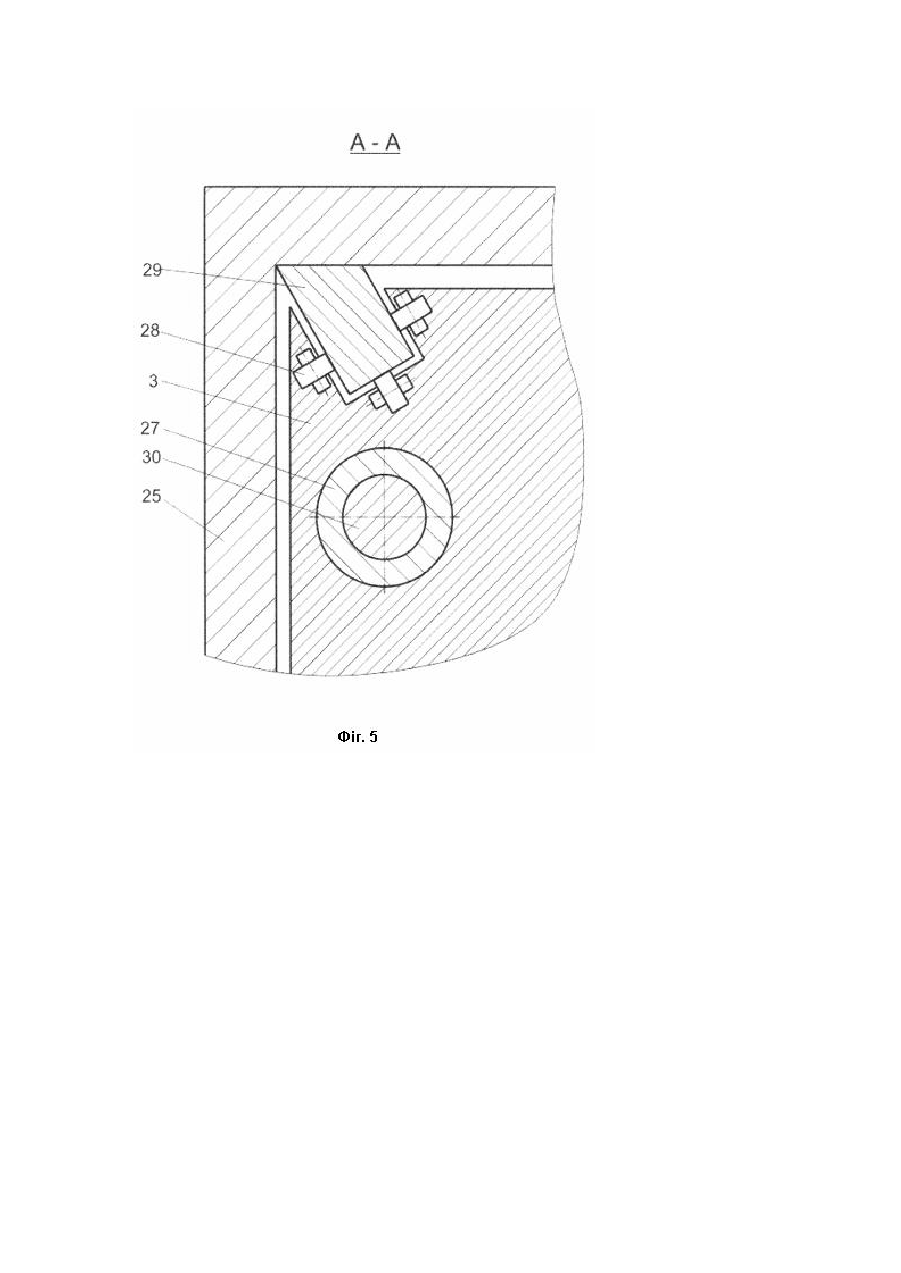
Корисна модель відноситься до області будівництва, а саме до конструкцій багатоповерхових гаражівавтоматів. За аналог прийнятий автоматизований багатоповерховий гараж для автомобілів [SU 842182, МКІ7 Е04Н6/06, 05.07.1981], що включає хрестоподібні в плані блоки зі з'єднаних між собою прямокутних боксів, в одому з яких (центральному) виконано підйомник з рухливим візком, який встановлено на колесах на нерухомій основі, і бічні бокси, опорна поверхня кожного з яких виконана у виді гребінки, пластини якої закріплені консольно, рухливий візок постачений вертикальними штирями, які закріплені на основі рівнобіжними рядами, а пластини гребінки опорної поверхні боксів розміщені рядами, які є рівнобіжними рядам вертикальних штирів рухливого візка, при цьому колеса візка встановлені з можливістю повороту навколо їхньої вертикальної осі не менш чим на 90° З метою фіксації пластин гребінки опорної поверхні боксів, у кожнім боксі встановлена опора-фіксатор, що має зуби, розташовані між пластинами гребінки, причому опора-фіксатор розміщена під опорною поверхнею боксів перпендикулярно її пластинам на їхньому вільному кінці і встановлена з можливістю повороту навколо її горизонтальної подовжньої вісі. Автоматизований багатоповерховий гараж для автомобілів працює таким чином. При постановці на стоянку автомобіль своїм ходом виїжджає в бокс завантаження і зупиняється в заданому місці. Водій підготовляє автомобіль до установки (виключає запалювання, включає передачу або стояночне гальмо і т. д.) і виходить з нього. Подальші операції по установці - зняттю автомобіля виконуються в автоматичному режимі за допомогою відомих засобів автоматики. Піднімальний пристрій, що звільнився від виконання попередніх операцій, зупиняється на технологічному поверсі, при цьому поворотне коло і гідроциліндр орієнтуються убік боксу завантаження. Рухливий візок у нижнім положенні висувається в бокс завантаження і займає кінцеве положення. Гідроциліндром піднімають і фіксують р ухливий візок у верхнім положенні, у результаті чого автомобіль з опорної поверхні боксу завантаження переміщається на опорну поверхню рухливого візка. Після цього рухливий візок з автомобілем повертається у відсік піднімального пристрою, що починає вертикальне переміщення до заданого поверху, при цьому поворотне коло і гідроциліндр орієнтуються убік заданого вільного боксу. Досягши заданого поверху, піднімальний пристрій зупиняється, рухливий візок з автомобілем висувається в заданий бокс і опускається в нижнє положення, залишаючи автомобіль на опорних пластинах боксу. Після цього рухливий візок повертається у відсік підземного пристрою, що по команді приступає до установки чи зняття чергового автомобіля. При знятті зі стоянки автомобіль зазначеним способом доставляється в бокс вивантаження, де водій займає своє місце і приводить автомобіль у рух. У разі потреби виробляється аварійне звільнення боксу вивантаження шляхом підняття на задану висоту задньої частини опорної поверхні. Загальними ознаками аналога і корисної моделі, що заявляється, є прямокутні бокси, в одному з яких (центральному) виконано підйомник з рухливим візком, встановлений на колесах на нерухомій основі, і бічні бокси. Конструкція аналога складна і припускає значну витрату матеріалів. Прототипом прийнятий пристрій горизонтального переміщення автомобіля для багатоярусної стоянки з підйомником [RU 2099496, МКІ7 Е04Н6/22, 20.12.1997], який містить піддони, опорні ролики для переміщення піддонів, направляючі для орієнтованого переміщення піддонів, які контактують з опорними роликами, рухливу раму, приводний пристрій рухливої рами, підйомник. Опорні ролики для переміщення піддона встановлені в боксах для автомобілів і на платформі підйомника, направляючі, які контактують з опорними роликами, встановлені відповідно на нижній поверхні піддона чи, в альтернативному варіанті, в боксах для автомобілів і на платформі підйомника, а опорні ролики встановлені на нижній поверхні піддонів, дві пари роликів для переміщення рухли вої рами встановлені на рухливій рамі - два спереду, два позаду, подовжні балки встановлені на платформі підйомника й у боксах для автомобілів, причому подовжні балки контактують із двома парами роликів рухливої рами, приводний пристрій рухливої рами містить зубчасті колеса, встановлені на рухливій рамі спереду, на однієї вісі з передньою парою роликів рухливої рами і позаду, на однієї вісі з задньою парою роликів рухливої рами, двигуни, встановлені на рухливій рамі, для приводу передніх зубчастих коліс і, для приводу задніх зубчастих коліс, зубчасті або цівочні рейки, взаємодіючі з зубчастими колісьми і встановлені на платформі підйомника і у боксах для автомобілів, розміщені в боксах для автомобілів елементи фіксації піддонів, фіксуючий механізм, встановлений на рухливій рамі, який складається з фіксуючих піддон елементів і приводного механізму до них, механізм намотування електрокабеля, встановлений на платформі підйомника або на рухливій рамі. Пристрій горизонтального переміщення автомобіля для багатоярусної стоянки з підйомником працює таким чином: від автоматизованої системи керування або від оператора надійшла команда перемістити автомобіль із платформи в бокс для збереження автомобіля. При цьому виключаються двигуни приводного пристрою рухливої рами і, зв'язані з двигунами, зубчасті колеса, взаємодіючи з зубчастою рейкою, переміщають рухливу раму і з'єднаний з нею піддон з автомобілем на ньому убік боксу для збереження автомобіля. При цьому переміщенні настає момент, коли переднє зубчасте колесо вийшло з зачеплення з зубчастою рейкою на платформі підйомника, але ще не ввійшло в зачеплення з зубчастою рейкою в боксі для автомобілів. У цей момент переміщення рухливо ї рами здійснюється за рахунок заднього зубчастого колеса, з'єднаного з іншим двигуном. Незалежний привід переднього і заднього зубчастих коліс кожного від свого двигуна забезпечує гарантоване зачеплення зубчастого колеса з зубчастою рейкою після подолання зазору між платформою і боксом. Розміщення зубчастого колеса на однієї вісі з відповідною парою роликів рухливої рами дозволяє забезпечити зчеплення зубчастого колеса і зубчастої рейки в необхідних допусках при перепаді висот платформи і пола боксу. Одночасно з переміщенням рухливої рами переміщається і піддон по опорних роликах, орієнтований направляючими, закріпленими на нижній поверхні піддона, і поступово переміщається на опорні ролики, встановлені в боксі, переборюючи зусилля опору, викликане тертям і перепадом висот між підлогою платформи і підлогою боксу. При переміщенні рухливої рами в бокс вона входить у контакт з елементами фіксації піддона, розміщеними в боксі, і блокує їх. При досягненні рухливою рамою кінцевого положення двигуни виключаються, подається команда на приводний механізм, що переміщає фіксуючі елементи, звільняючи піддон від зв'язку з рухливою рамою, після чого подається команда на включення двигунів з обертанням вихідного вала в протилежному напрямку і зубчасті колеса переміщають рухливу раму, уже без піддона, убік платформи підйомника. При переміщенні рухливої рами убік платформи звільняються елементи фіксації в боксі і фіксують піддон, утримуючи його з автомобілем у боксі для збереження автомобілів. Після переміщення рухливої рами на платформу двигуни виключаються, а в автоматизовану систему керування чи на пульт оператора надходить сигнал про готовність системи до наступної команди. Загальними ознаками прототипу і корисної моделі, що заявляється, є піддони, опорні ролики для переміщення піддонів, що контактують з опорними роликами направляючі для орієнтованого переміщення піддонів, рухливу раму, приводний пристрій рухливої рами, підйомник Конструкція прототипу не забезпечує роботу гаража - прийом і видачу автомобілів при поломці рухливої рами, тверда прив'язка пристрою до силових мереж, при відключенні яких пристрій не буде працювати, складність конструкції механізму намотування кабелю і її низька працездатність. В основу корисної моделі поставлена задача створення автоматичного паркувального модуля, у якому за рахунок конструктивних особливостей забезпечується автономність, яка виключає жорстку прив'язку до стаціонарних мереж електропостачання. Поставлена задача вирішується тим, що паркувальний модуль, який містить вертикальну ша хту, бокси, розташовані по обох сторонах вертикальної шахти, піднімальну платформу, встановлену у вертикальній шахті з можливістю переміщення у вертикальному напрямку, механізм вертикального переміщення піднімальної платформи, візки, встановлені в боксах і виконані з можливістю горизонтального переміщення з боксів на піднімальну платформу і з піднімальної платформи в бокси, систему керування, зв'язану з механізмом вертикального переміщення піднімальної платформи і візками, у відповідності з корисною моделлю, на кожнім візку встановлений автономний привід горизонтального переміщення візка, який включає акумуляторну батарею, двигун, редуктор і вихідну шестірню, виконану з можливістю зачеплення з рейкою, встановленою в боксі, і з рейкою, встановленою на піднімальній платформі. Кожен візок постачений пристроєм заряду акумуляторної батареї автономного приводу горизонтального переміщення візка, який виконано з можливістю підключення до стаціонарної електричної мережі при перебуванні візка в боксі. Кожен візок постачений опорними роликами, які виконані з можливістю переміщення по направляючих, які встановлені у боксі і по направляючих, які встановлені на піднімальній платформі. Система керування складається з датчиків положення візка, які знаходяться в кожнім боксі і на піднімальній платформі, лічильника обертів механізму вертикального переміщення піднімальної платформи, мікропроцесорного блоку, блоку керування приводу механізму вертикального переміщення піднімальної платформи, системи керування приводом горизонтального переміщення візка і порту передачі даних. Система керування приводом горизонтального переміщення візка складається з датчика положення візка і датчика навантаження, які знаходяться на візку, мікропроцесорного блоку, блоку керування і порту передачі даних. Зазначені ознаки складають сутність корисної моделі. Істотні ознаки корисної моделі знаходяться в причинно-наслідковому взаємозв'язку з технічним результатом, що досягається, (забезпечення автономного режиму роботи). Так, виконання на кожнім візку автономного приводу горизонтального переміщення дозволяє робити прийом і видачу автомобілів при поломці одного чи декількох візків. Встановлення на кожнім візку пристрою заряду акумуляторної батареї автономного приводу горизонтального переміщення, виконаного з можливістю підключення до стаціонарної електричної мережі, дозволяє робити підзарядку акумулятора при перебуванні візка в боксі. Система керування а також система керування приводом горизонтального переміщення візка дозволяє цілком автоматизувати процес прийому і видачі автомобілів. Суть винаходу пояснюється малюнками, де на Фіг. 1 показаний загальний вид автоматичного паркувального модуля, на Фіг. 2 - каркас паркувального модуля без візків, на Фіг. 3 - схема приводу візка, системи харчування і керування приводом, на Фіг. 4 - схема підйомника, на Фіг. 5 - схема пристрою, що запобігає перекосу платформи, на Фіг. 6 - схема керування паркувального модуля. Паркувальний модуль, який містить вертикальну ша хту 1, бокси 2, розташовані по обох сторонах вертикальної шахти 1, піднімальну платформу 3, встановлену у вертикальній шахті 1 з можливістю переміщення у вертикальному напрямку, механізм вертикального переміщення піднімальної платформи 4, візки 5, встановлені в боксах 2 і виконані з можливістю горизонтального переміщення з боксів 2 на піднімальну платформу 3 і з піднімальної платформи 3 у бокси 2. На кожнім візку 5 встановлений автономний привід горизонтального переміщення візка, який включає акумуляторну батарею 6, двигун 7, редуктор 8 і вихідні шестірні 9, виконану з можливістю зачеплення з рейкою 10, встановлену в боксі 2, і з рейкою 11, встановлену на піднімальній платформі 3. Кожен візок 5 постачений пристроєм заряду акумуляторної батареї 12 автономного приводу горизонтального переміщення, який виконано з можливістю підключення до стаціонарної електричної мережі при перебуванні візка 5 у боксі 2. Кожен візок 5 постачений опорними роликами 13, які виконані з можливістю переміщення по направляючим 14, встановленим у боксі 2 і по направляючим 15, встановленим на піднімальній платформі 3. Система керування складається з датчиків положення візка 16, які знаходяться в кожнім боксі 2 і на піднімальній платформі 3, лічильника обертів 17 механізму вертикального переміщення піднімальної платформи 4, мікропроцесорного блоку 18, блоку керування 19 приводом механізму вертикального переміщення піднімальної платформи 4. Система керування приводом горизонтального переміщення візка 5 складається з датчика положення візка 20 і датчика навантаження 21, які знаходяться на візку 5, мікропроцесорного блоку 22, блоку керування 23 і порту обміну даними 24. Каркас 25 паркувального модуля зібраний з металевого профілю з обшиванням 26 з теплоізолюючих матеріалів. Піднімальна платформа 3 містить гайки 27 і ролики 28, які контактують з направляючими 29 і запобігають перекосу піднімальної платформи 3. Гайки 27 знаходяться в зачепленні з гвинтами 30 механізму вертикального переміщення піднімальної платформи 4, підвішеними на радіально-упорних підшипниках 31 на технологічному поверсі 32 і центруються радіальними підшипниками 33 у цокольній ніші 34. Приводом гвинтів 30 служить двигун 35 з редуктором 36 і ланцюговою передачею 37, яка з'єднує всі гвинти 30 і забезпечує їхнє син хронне обертання. Живлення двигуна 35 здійснюється від акумулятора 38 через перетворювач напруги 39. Пристрій заряду акумуляторної батареї 12 за допомогою розйому 40, який знаходиться на візку 5, і розйому 41, який знаходиться в боксі 2, зв'язано з загальним джерелом живлення 220В перемінного струму. Живлення двигуна 7 здійснюється від акумулятора 6 через перетворювач напруги 42. Зарядка акумулятора 38 здійснюється від пристрою заряду акумуляторної батареї 43, підключеного до загального джерела живлення. Два опорних ролики 13 візка 5 з'єднані валом 44 і утворять колісну пару 45. Вихідні шестірні 9 виконані на кінцях колісної пари 45. У вихідному положенні піднімальна платформа 3 з порожнім візком 5 знаходиться в нижнім положенні. Водій, поставивши машину на візок 5, виходить з будинку паркувального модуля і робить оплату паркування електронною картою. Мікропроцесорний блок 18, одержавши сигнал про оплату паркування, відправляє сигнал на блок керування 19. У свою чергу блок керування 19 подає напругу від акумулятора 38 через перетворювач напруги 39 на двигун 35. Обертання від двигуна 35 через редуктор 36 і ланцюгову передачу 37 передається гвинтам 30, які, обертаючи, приводять у поступальний рух гайки 27. Гайки 27 захоплюють за собою піднімальну платформу З, спираючись на направляючі 15 якої колісною парою 45 і опорними роликами 13 стоїть візок 5 з автомобілем. Кожен візок 5 має своє, строго визначене місце в будинку паркувального модуля. Мікропроцесорний блок 18 містить дані про місце кожного візка 5 і про висоту її підйому з піднімальною платформою 3 - тобто кількості обертів від нульового положення. Тому при підйомі сигнал з лічильника обертів 17 передається на мікропроцесорний блок 18 і порівнюється з вихідним. При рівності сигналів мікропроцесорний блок 18 посилає сигнал на блок керування 19, який у свою чергу відключає напругу на двигун 35. Піднімальна платформа 3 зупиняється. Мікропроцесорний блок 18 подає сигнал через порт обміну даними 24 на мікропроцесорний блок 22 візка 5, який дає команду блоку керування 23 подати напругу від акумулятора 6 через перетворювач напруги 42 на двигун 7. Обертання від двигуна 7 передається через редуктор 8 на вал 44 колісної пари 45. Зубчасті колеса 9, які знаходяться на кінцях колісної пари 45 і входять у зачеплення з рейками 11 і 10, переміщають візок 5 з автомобілем по направляючим 15 і 14 у бокс 2. При постановці візка 5 на місце датчик положення візка 20 передає сигнал мікропроцесорному блоку 22, який подає сигнал на блок керування 23. Блок керування 23 відключає напругу від двигуна 7. У той же час датчик положення візка 16 подає сигнал на мікропроцесорний блок 18 про те, що візок 5 з автомобілем став на місце і піднімальна платформа 3 порожня. Мікропроцесорний блок 18 робить пошук порожнього візка 5, порівнюючи дані від датчиків навантаження 21 з вихідними з бази даних. Якщо порожній візок 5 знайдено, то робиться порівняння поточного положення піднімальної платформи 3 з положенням, у яке їй необхідно переміститися, у залежності від цього дається сигнал блоку керування 19, який подає напругу на двигун 35. Двигун 35 через редуктор 36 і ланцюгову передачу 37 передає обертання гвинтам 30, які за допомогою гайок 27 переміщають піднімальну платформу 3 до порожнього візка 5. Коли сигнал, який передано від лічильника обертів 17 на мікропроцесорний блок 18, буде дорівнювати вихідному сигналу положення візка 5, мікропроцесорний блок 18 передає сигнал блоку керування 19, який відключає напругу від дви гуна 35. Піднімальна платформа 3 зупиняється. Мікропроцесорний блок 18 подає сигнал через порт 24 на мікропроцесорний блок 22, який передає сигнал на блок керування 23. Блок керування 23 подає напругу від акумулятора б через перетворювач напруги 42 на двигун 7. Двигун 7 передає обертання через редуктор 8 і вал 44 колісній парі 45, яка передає обертання шестірням 9, які входять у зачеплення з рейками 10. Візок 5 переміщається по направляючим 14 на піднімальну платформу 3. При постановці візка 5 на піднімальну платформу 3 сигнал від датчика положення візка 20 передається на мікропроцесорний блок 22, який у свою чергу подає сигнал блоку керування 23. Блок керування 23 відключає напругу від двигуна 7. У той же час датчик положення візка 16 передає сигнал через порт 24 на мікропроцесорний блок 18 про те, що порожній візок 5 знаходиться на піднімальній платформі 3. Мікропроцесорний блок 18 передає сигнал на блок керування 19, який подає напругу на двигун 35, який передає обертання через редуктор 36 і ланцюгову передачу 37 гвинтам 30. Піднімальна платформа 3 з порожнім візком 5 опускається у ви хідне положення. Далі цикл повторюється. Якщо мікропроцесорний блок 18 не знаходить порожнього візка 5, то передає сигнал блоку керування 19, який у свою чергу подає напругу на двигун 35, який передає обертання через редуктор 36 і ланцюгову передачу 37 гвинтам 30. Піднімальна платформа З опускається у ви хідне положення. Усі місця на паркуванні зайняті. Мікропроцесорний блок 18 очікує команди на видачу автомобіля, який надходить, якщо прийшовший за автомобілем водій скористається електронною картою. Після видачі автомобіля порожній візок 5 залишається внизу на піднімальній платформі 3 у чеканні нового автомобіля. Якщо знадобиться видати ще один автомобіль, піднімальна платформа 3 піднімає порожній візок 5 на її місце і повертається за видаваним автомобілем. При постановці візка 5 на місце відбувається з'єднання розйому 40, який знаходиться на візку 5, і розйому 41, який знаходиться в боксі 2. Мікропроцесорний блок 22 оцінює ступінь зарядки акумулятора 6, і у випадку розрядки дає сигнал на пристрій заряду акумуляторної батареї 12, який робить підзарядку акумулятора 6. Мікропроцесорний блок 18 оцінює ступінь зарядки акумулятора 38, і у випадку розрядки дає сигнал на пристрій заряду акумуляторної батареї 43, який робить підзарядку акумулятора 38. Паркувальний модуль працює в автоматичному режимі, але при поломці автоматики може працювати й у режимі ручного керування, при цьому керування виробляється від пульта керування оператора (не показаний). При поломці одного або декількох візків прийом і видача автомобілів здійснюються. тому що на кожнім візку виконано автономний привід горизонтального переміщення. Запропонований паркувальний модуль цілком автономний і не має жорсткої прив'язки до силових мереж.
ДивитисяДодаткова інформація
Назва патенту англійськоюParking module
Автори англійськоюZakirov Valerii Damyrovych
Назва патенту російськоюПарковочный модуль
Автори російськоюЗакиров Валерий Дамирович
МПК / Мітки
МПК: E04H 6/06
Мітки: паркувальний, модуль
Код посилання
<a href="https://ua.patents.su/9-8126-parkuvalnijj-modul.html" target="_blank" rel="follow" title="База патентів України">Паркувальний модуль</a>
Спосіб виготовлення модуля чіп-картки, модуль чіп-картки, виготовлений за цим способом, і комбінована чіп-картка, що містить цей модуль
Номер патенту: 52673
Опубліковано: 15.01.2003
Автори: Вільм Роберт, Удо Детлеф
МПК: G06K 19/077
Мітки: чіп-картки, цим, способом, комбінована, виготовлений, виготовлення, містить, модуля, чіп-картка, спосіб, модуль
Формула / Реферат:
1. Спосіб виготовлення модуля чіп-картки (1), що включає у себе носій (2) з першою контактною площиною (3) та напівпровідниковий чіп (4), а також електропровідні з'єднання (5) між напівпровідниковим чіпом і першою контактною площиною, і на боці якого, протилежному першій контактній площині (3) носія (2), розташована друга контактна площина (6), що електропровідно з'єднана з напівпровідниковим чіпом (4), який відрізняється тим, що він...
Силовий модуль автоклава
Номер патенту: 73390
Опубліковано: 15.07.2005
Автор: Сноп Владімір Ісаковіч
МПК: B22F 3/15, B01J 3/00, B01J 19/02, B01J 3/03, B22F 3/00, B01J 3/04, B30B 11/00
Мітки: автоклава, силовий, модуль
Формула / Реферат:
1. Силовий модуль автоклава, що містить контейнер з розміщеними в ньому і герметично ущільненими рухливими торцевими пробками, ригелі, що обмежують осьове переміщення цих пробок і силову раму, який відрізняється тим, що силова рама виконана у вигляді трьох овальних силових секцій - двох бічних, що охоплюють ригелі, і однієї центральної, що охоплює ригелі, та контейнер із пробками рівно віддаленими одна від одної по довжині ригеля, причому...
Гальмовий модуль дискового гальма
Номер патенту: 52186
Опубліковано: 16.12.2002
Автори: Калашніков Олег Юрієвич, Марченко Сергій Анатолійович, Токарев Олексій Захарович, Барабанщиков Віталій Никифорович, Хорунжий Володимир Дмитрович
МПК: B66D 5/00, F16D 55/22
Мітки: модуль, гальмовий, дискового, гальма
Формула / Реферат:
1. Гальмовий модуль дискового гальма, наприклад підіймальної машини, що включає гальмову колодку, встановлену в корпусі з можливістю плоско-паралельного переміщення відносно гальмового диска під впливом силового циліндра з пружинами, який відрізняється тим, що силовий циліндр із пружинами встановлено так, що його поздовжня вісь направлена перпендикулярно лінії переміщення колодки, а його шток оснащено клиновим елементом, взаємодіючим з...
Ручний господарський візок

Номер патенту: 27841
Опубліковано: 16.10.2000
Автор: Худолій Олександр Іванович
МПК: B62B 1/00
Мітки: візок, ручний, господарський
Формула / Реферат:
Ручний господарський візок, що містить опорну раму, спряжену з вантажонесучою платформою, поворотною в повздовжній вертикальній площині, яка має в нижній частині упорний елемент, несучу П - подібну рукоятку, телескопічно зв’язану з рамою з можливістю фіксації в потрібному положенні, і ходові колеса, який відрізняється тим, що ходові колеса змонтовані на вантажонесучій платформі з боку опорної рами, опорна рама виконана з можливістю...
Пристрій для підводного витягування хребта

Номер патенту: 72145
Опубліковано: 17.01.2005
Автори: Жегестовський Володимир Іванович, Гірняк Мирослав Ярославович, Ніжегородов Юрій Васильович, Калайджан-Савчук Світлана Самелівна, Кучер Богдан Тимофійович
МПК: A61H 23/00
Мітки: пристрій, хребта, витягування, підводного
Формула / Реферат:
Пристрій для підводного витягування хребта, який містить пересувний візок-лежак з ременями та набедреним поясом, механізм переміщення візка-лежака, а також привідну систему, який відрізняється тим, що візок-лежак розміщений на дугоподібних рейкових напрямних, нижня частина яких розміщена в зоні витягування хребта, тобто у басейні з водою, а привідна система містить механізм обмежування руху візка-лежака по рейкових напрямних та реле часу.
Попередній патент: Універсальна установка для утомних випробувань групи зразків
Наступний патент: Багатоступеневий секційний насос
Випадковий патент: Пристрій для виміру тиску