Електродинамічний привід
Номер патенту: 87116
Опубліковано: 25.06.2009
Автори: Ломов Сергій Георгійович, Корогодський Володимир Анатолійович, Кирилюк Ігор Олегович


Формула / Реферат
1. Електродинамічний привід, у якому електрична енергія перетворюється в лінійне переміщення штовхача привода, що включає електричну котушку і електропровідний якір, виконаний з неферомагнітного матеріалу принаймні в тій частині якоря, в яку проникає магнітне поле котушки, взаємодіючий з котушкою при підключенні котушки до імпульсного джерела електричної енергії, що містить конденсатор з підключеним до нього комутаційним пристроєм із блоком керування, який відрізняється тим, що містить ![]() електричних котушок, при цьому
електричних котушок, при цьому ![]() , і
, і ![]() електропровідних якорів, при цьому
електропровідних якорів, при цьому ![]() , а комутаційний пристрій виконаний з можливістю забезпечення часткового розряду конденсатора в аперіодичному режимі розряду.
, а комутаційний пристрій виконаний з можливістю забезпечення часткового розряду конденсатора в аперіодичному режимі розряду.
2. Електродинамічний привід за п. 1, який відрізняється тим, що комутаційний пристрій виконаний з можливістю забезпечення керування потужністю привода багаторазовим підключенням-відключенням конденсатора.
3. Електродинамічний привід за п. 1 або п. 2, який відрізняється тим, що комутаційний пристрій виконаний з можливістю забезпечення позиціонування привода шляхом подачі серії імпульсів струму на котушку зі струмом.
4. Електродинамічний привід за будь-яким з пп. 1-3, який відрізняється тим, що комутаційний пристрій являє собою транзистор з ізольованою базою.
5. Електродинамічний привід за будь-яким з пп. 1-4, який відрізняється тим, що конденсатор являє собою електролітичний конденсатор.
6. Електродинамічний привід за будь-яким з пп. 1-5, який відрізняється тим, що штовхачем є електрична котушка.
7. Електродинамічний привід за будь-яким з пп. 1-5, який відрізняється тим, що штовхачем є електропровідний якір.
8. Електродинамічний привід за будь-яким з пп. 1-7, який відрізняється тим, що електропровідний якір виконаний у вигляді гільзи.
9. Електродинамічний привід за будь-яким з пп. 1-7, який відрізняється тим, що електропровідний якір виконаний у вигляді диска.
10. Електродинамічний привід за п. 9, який відрізняється тим, що диск виконаний з кільцевою канавкою на торці диска, при цьому диск розташований на котушці з забезпеченням охоплення котушки практично до площини симетрії котушки.
11. Електродинамічний привід за будь-яким з пп. 1-10, який відрізняється тим, що котушка має обмотку, виконану зі стрічки прямокутного перерізу, при цьому широка сторона стрічки розміщена в площині, перпендикулярній осі котушки.
12. Електродинамічний привід за будь-яким з пп. 1-11, який відрізняється тим, що електрична котушка має висоту, меншу ніж 3 мм.
13. Електродинамічний привід за будь-яким з пп. 1-12, який відрізняється тим, що містить ![]() = 1 електричних котушок і
= 1 електричних котушок і ![]() = 1 електропровідних якорів.
= 1 електропровідних якорів.
14. Електродинамічний привід за будь-яким з пп. 1-12, який відрізняється тим, що містить ![]() електричних котушок і
електричних котушок і ![]() електропровідних якорів.
електропровідних якорів.
15. Електродинамічний привід за будь-яким з пп. 1-12, який відрізняється тим, що містить ![]() електричних котушок і
електричних котушок і ![]() електропровідних якорів.
електропровідних якорів.
16. Електродинамічний привід за будь-яким з пп. 1-15, який відрізняється тим, що електропровідний якір привода виконаний зі співвідношенням між його індуктивним і активним опорами при еквівалентній діючій частоті не менш ніж 5.
17. Електродинамічний привід за п. 16, який відрізняється тим, що матеріал якоря має питомий омічний опір менше ніж 2,7-10-8 ![]() .
.
Текст
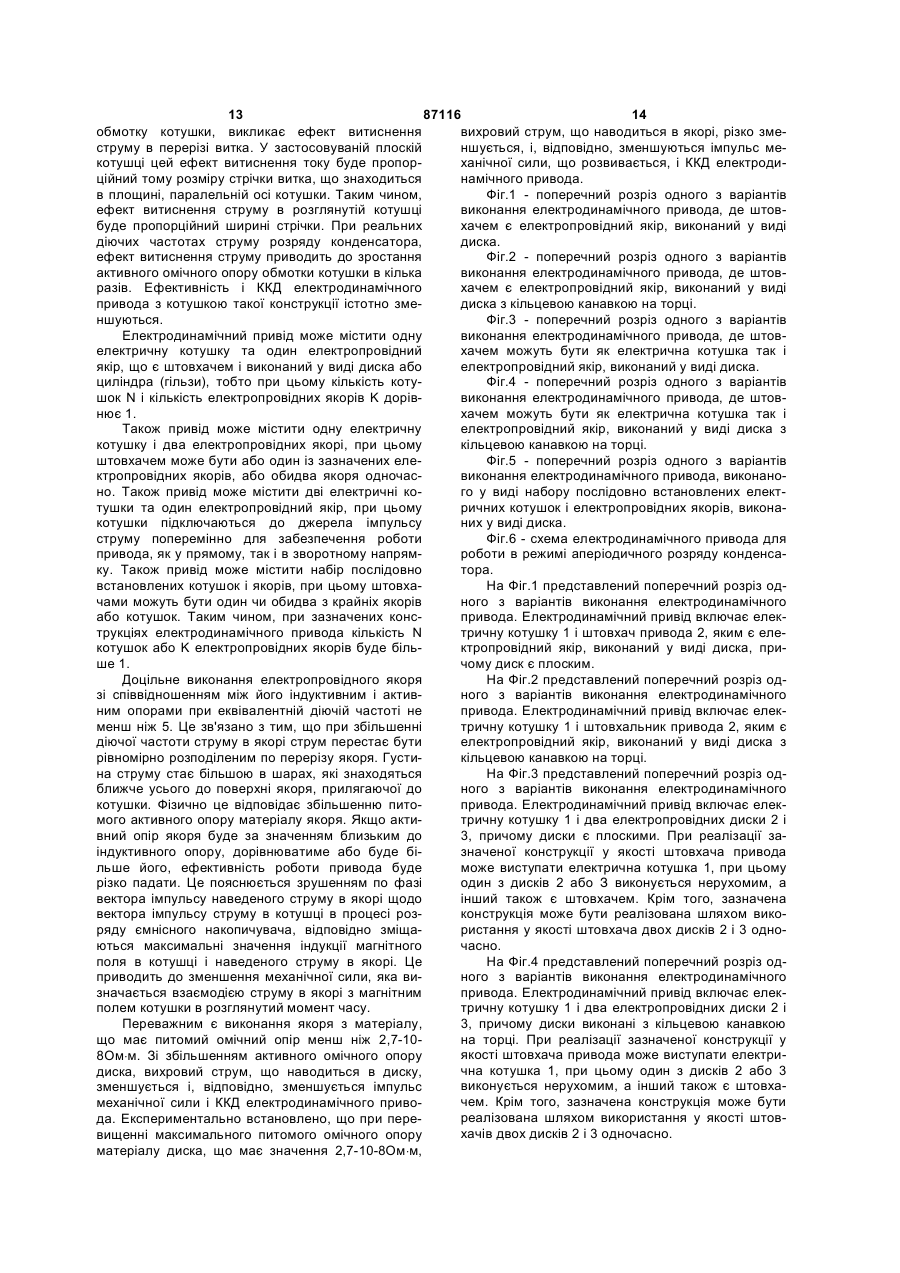
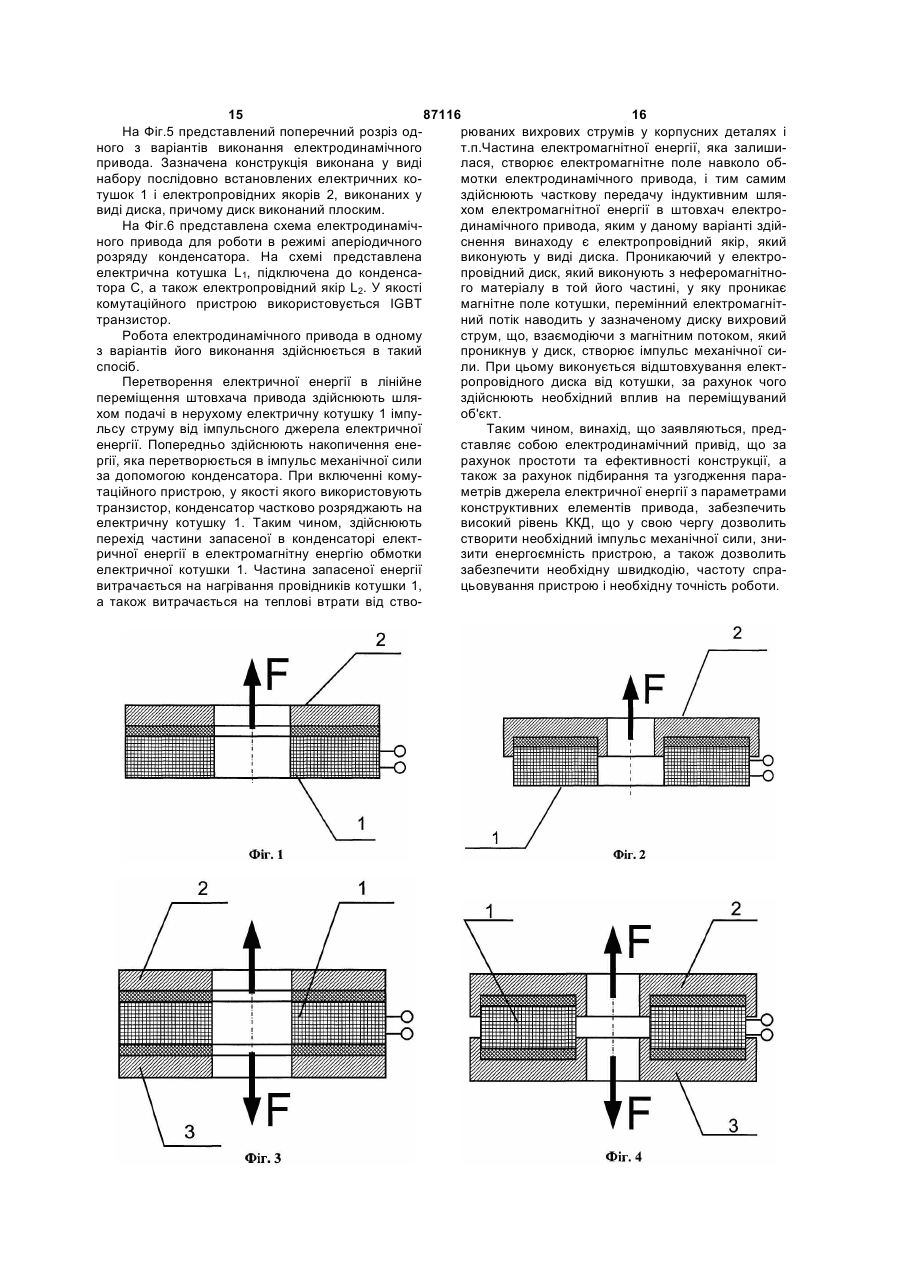
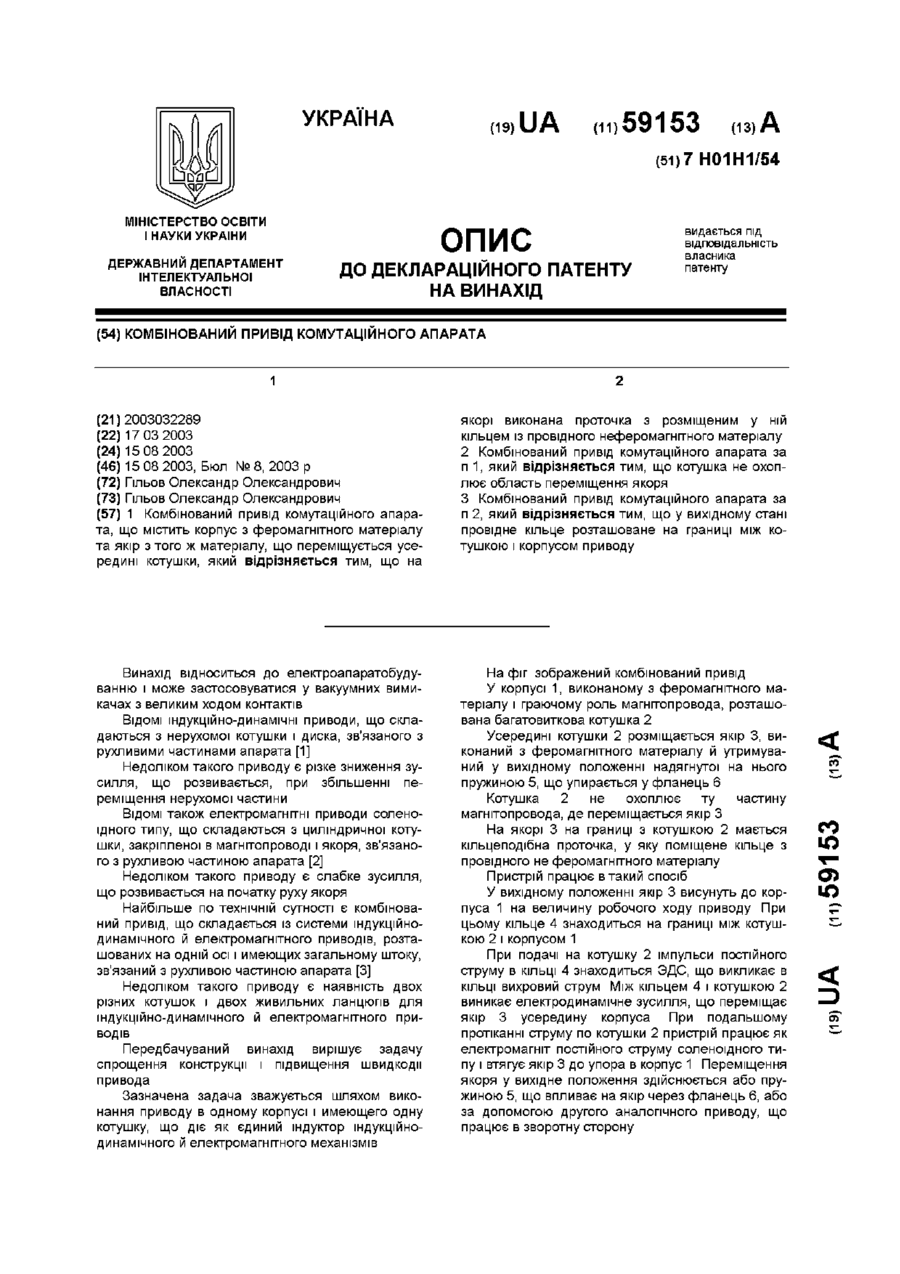
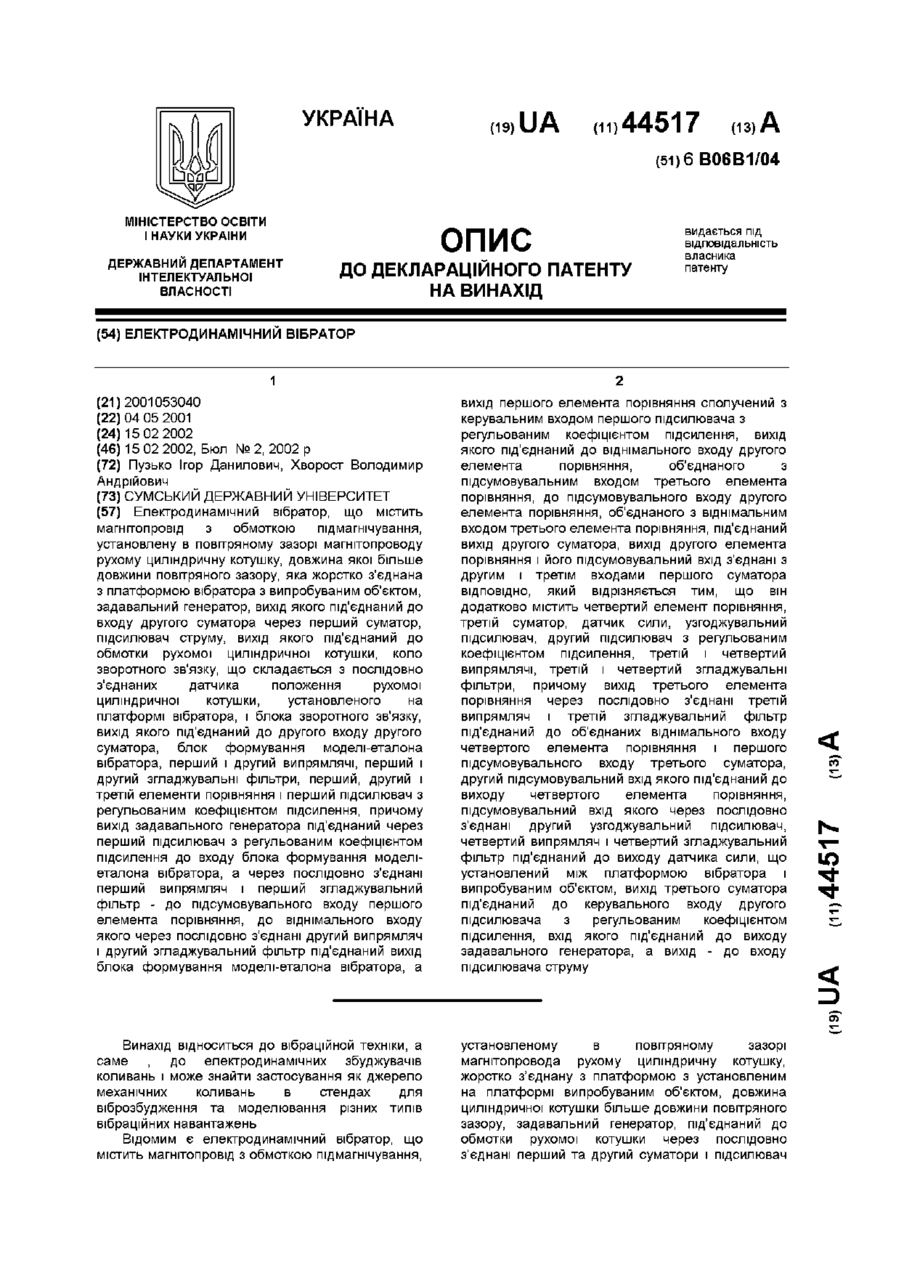
1. Електродинамічний привід, у якому електрична енергія перетворюється в лінійне переміщення штовхача привода, що включає електричну котушку і електропровідний якір, виконаний з неферомагнітного матеріалу принаймні в тій частині якоря, в яку проникає магнітне поле котушки, взаємодіючий з котушкою при підключенні котушки до імпульсного джерела електричної енергії, що містить конденсатор з підключеним до нього комутаційним пристроєм із блоком керування, який відрізняється тим, що містить N електричних котушок, при цьому N ³ 1 , і K електропровідних якорів, при цьому K ³ 1 , а комутаційний пристрій виконаний з можливістю забезпечення часткового розряду конденсатора в аперіодичному режимі розряду. 2. Електродинамічний привід за п.1, який відрізняється тим, що комутаційний пристрій виконаний з можливістю забезпечення керування потужністю привода багаторазовим підключеннямвідключенням конденсатора. 3. Електродинамічний привід за п.1 або п.2, який відрізняється тим, що комутаційний пристрій виконаний з можливістю забезпечення позиціонування привода шляхом подачі серії імпульсів струму на котушку зі струмом. 4. Електродинамічний привід за будь-яким з пп.13, який відрізняється тим, що комутаційний пристрій являє собою транзистор з ізольованою базою. 5. Електродинамічний привід за будь-яким з пп.14, який відрізняється тим, що конденсатор являє собою електролітичний конденсатор. 2 (19) 1 3 Винахід відноситься до області електротехніки, зокрема до електродинамічних приводів. Існує ряд пристроїв, для функціонування яких необхідні електрокеровані приводи, що забезпечують задані переміщення протягом дуже коротких і точно позначених проміжків часу. Так, наприклад, в схемах керування перемінним струмом високої потужності очевидна перевага відкриття і закриття контактів за час, проміжок якого набагато менше половини тривалості циклу перемінного струму, що дозволяє розірвати або встановити контакт протягом одного з коротких проміжків часу, коли миттєва потужність в схемі відносно низька. У пристроях відбору проб рідин або газів у випадку вивчення процесів, що швидко змінюються, потрібно зробити відбір зразка в точно визначений проміжок часу. У системах дозування рідин або газів швидкість і точність роботи привода є визначальною для досягнення точності дозування. В якості електрокерованих приводів, що використовуються для забезпечення функціонування зазначених типів пристроїв, застосовуються п'єзоелектричні приводи, електромагнітні приводи, а також електродинамічні приводи різної конструкції. Дію п'єзоелектричного привода засновано на п'єзоелектричному ефекті - взаємному, оборотному зв'язку механічних деформацій або напруг і електричної поляризації в деяких діелектричних кристалах. Принциповим недоліком п'єзоелектричного привода, що обмежує його швидкодію, є мала відносна зміна розмірів навіть при великій величині напруженості електричного поля. Внаслідок цього, для переміщення привода, наприклад на 50-100мкм необхідна сумарна висота кристалів більша ніж 100мм, що приводить до росту маси рухливої частини привода. При цьому механічна міцність п'єзоелектричних кристалів при великій кількості циклів навантаження значно нижче міцності металів, а це приводить до неможливості одержання великої швидкодії при достатньому ресурсі роботи такого привода. Принцип дії електромагнітного привода заснований на прагненні магнітного поля, створюваного струмом, який протікає через обмотку електромагніта, до мінімального об'єму. Внаслідок цього рухливий феромагнітний якір електромагніта прагне зайняти таке положення, коли середня силова лінія магнітного поля в магнітопроводі електромагніта буде мати мінімально можливу для даної конструкції довжину. Принциповими недоліками електромагнітного привода, що обмежують його швидкодію, є ефект насичення магнітопроводу і великий вплив початкового повітряного зазору на величину тягової сили. Таким чином, для збільшення тягової сили електромагніта, через ефект насичення магнітопроводу, необхідно пропорційно збільшувати масу рухливої частини магнітопроводу, тобто питома (віднесена до рухливої маси) величина сили тяги електромагніта обмежена. Отже, можна говорити про існування межі швидкодії пристроїв з даним приводом, що обмежує область його застосування. Предметом даного винаходу є електродинамічний привід, принцип дії якого заснований на використанні ефекту силової взаємодії електричного струму і магнітного поля. Основними елементами 87116 4 конструкції існуючих електродинамічних приводів є імпульсне джерело струму, що включає конденсатор, комутатор і блок керування, а також штовхач привода, яким може бути електрична котушка або електропровідний якір, що може бути виконаний у виді диска або циліндра (гільзи). При пропущенні через електричну котушку імпульсу струму виникає магнітний потік, що взаємодіє з електропровідним матеріалом електропровідного якоря і наводить в ньому електрорушійну силу. Під дією електрорушійної сили в якорі виникає вихровий електричний струм. Струм якоря взаємодіє з магнітним полем котушки зі струмом, створюючи тим самим імпульс механічної сили відштовхування якоря від котушки. Звичайно застосовується спосіб регулювання привода зміною напруги зарядки конденсаторів, що розряджаються на обмотку котушки в коливальному режимі розряду. Однак відомі електродинамічні приводи мають цілий набір істотних недоліків, до яких відноситься відносно низький ККД, неможливість тривалої роботи з високою частотою спрацьовування, складність їх конструктивного виконання, великі розміри зазначених пристроїв і їх дорожнеча. Крім того, зазначені приводи функціонують близько до своїх граничних можливостей по параметрах швидкодії і частоти спрацьовування. В відомих електродинамічних приводах не враховується вплив застосовуваного режиму розряду конденсатора на його ресурс і енергоємність. В даний час в існуючих електродинамічних приводах в основному застосовується коливальний режим розряду конденсатора, що не забезпечує максимальної ефективності привода. При коливальному режимі розряду конденсатора і при комутації за допомогою тиристора, струм, що проходить через котушку, являє собою одну напівхвилю розрядного імпульсу струму конденсатора, тому що тиристор відключається при проходженні струму в котушці через нуль. Це енергетично невигідний режим розряду, тому що до моменту відключення імпульсу струму конденсатор перезаряджається до напруги зі зворотним знаком. Вказана напруга менше вихідної за величиною, але внаслідок зміни знаку напруги, до початку наступного робочого циклу електродинамічного привода необхідно здійснити часткове перезарядження конденсатора. Таким чином, додаткові струми, що протікають в зарядному пристрої, знижують ККД електродинамічного привода в цілому. Крім того, збільшення розмаху напруги на конденсаторі до величини більшої, ніж необхідна напруга заряду конденсатора, знижує ресурс роботи конденсатора. Зазначені недоліки коливального режиму розряду конденсатора, коли використовується одна напівхвиля імпульсу струму, широко відомі. Однак у практично використовуваних електродинамічних приводах застосування коливального режиму розряду конденсатора обумовлено можливостями використовуваної комутаційної апаратури, у якості якої в даний час використовуються в основному тиристори. Сучасна комутаційна апаратура має обмеження по швидкості наростання струму. Перевищення цієї швидкості наростання розрядного струму в обмотці котушки приводить до необхідно 5 87116 6 сті збільшення потужності комутаційного пристрою внутрішніх витків внаслідок низької теплопровідноабо до теплового пробою комутаційного пристрою. сті існуючих електроізоляційних матеріалів, що у Крім того, керування зусиллям, що розвиває елекреальних обмотках котушки складають біля полотродинамічний привід, в основному здійснюється вини об'єму. Потужність, а значить швидкодія та шляхом регулювання напруги заряду конденсаточастота спрацьовування існуючих електродинаміра, що є технологічно складним. чних приводів обмежені можливостями їх охолоТаким чином, можна зробити висновок, що кодження. ливальний режим розряду конденсатора доцільно Також на рівень ККД електродинамічного призастосовувати для найпростіших електродинамічвода впливає співвідношення між індуктивним і них приводів невеликої потужності без регулюванактивним опорами диска при діючій частоті струму. ня механічного зусилля, що розвивається електУ відомих електродинамічних приводах не виявродинамічним приводом. Застосування ж лений вплив на ефективність привода співвіднозазначеного режиму конденсатора для порівняно шень між індуктивним і активним опорами диска потужних електродинамічних приводів у пристропри діючій частоті струму. Якщо активний опір дисях, для функціонування яких потрібно забезпеченка буде близько до індуктивного опору, дорівнює ня заданих переміщень протягом дуже коротких і або буде більше його, ефективність роботи привоточно позначених проміжків часу, є недоцільним, да буде різко падати. Це пояснюється зрушенням оскільки не дозволяє забезпечити необхідну по фазі вектора імпульсу наведеного струму в швидкодію і частоту спрацьовування електродидиску щодо вектора імпульсу струму в котушці в намічного привода. процесі розряду ємнісного накопичувача, внасліУ відомих конструкціях електродинамічних док чого зміщаються максимальні значення індукприводів в якості імпульсного джерела енергії виції магнітного поля в котушці і наведеного струмі в користовуються конденсатори металопаперового, диску. Це приводить до зменшення механічної металоплівкового та інших типів, призначених для сили, яка визначається взаємодією струму в диску роботи в імпульсних режимах з повним розрядом з магнітним полем котушки в розглянутий момент запасеної в конденсаторі енергії. Такі конденсаточасу. ри мають принципові недоліки. В імпульсному реУ відомих та найбільш розповсюджених консжимі розряду при короткочасному за величиною трукціях електродинамічного привода не визначеімпульсі струму, що необхідний для ефективної ний і не враховується вплив розмірів і конструкції роботи електродинамічного привода, ресурс робообмотки електричної котушки на коефіцієнт магніти таких конденсаторів має невелику величину. тного зв'язку котушки і якоря, а, отже, і на ефектиТак для більшості типів конденсаторів, що працювність електродинамічного привода. Магнітний ють в імпульсному режимі розряду, ресурс не пезв'язок між електричною котушкою і електропровіревищує 100млн розрядів. Іншим недоліком таких дним якорем визначається коефіцієнтом магнітноконденсаторів є низька питома енергоємність. Так го зв'язку, що є найважливішим конструктивним для сучасних серійних конденсаторів зазначених параметром електричної котушки і якоря. Фізично вище типів питома енергоємність не перевищує коефіцієнт магнітного зв'язку показує, яка частина 50Дж/дм3. магнітного потоку, що створюється струмом, який Зазначені недоліки обумовлені також багатьма протікає по обмотці електричної котушки, проникає іншими факторами. Зокрема експериментально в якір і бере участь у створенні імпульсу механічбуло встановлено, що відносно низький ККД і діюної сили. Коефіцієнт магнітного зв'язку K визначача сила відомих електродинамічних приводів обується як мовлені неоптимальним сполученням параметрів і M K= (1) недоліками конструкції їх складових частин. ВнаL1 × L2 слідок цього при заданій величині імпульсу мехаде Μ - взаємна індуктивність обмотки електринічної сили в кілька разів збільшується величина чної котушки і якоря; необхідної електричної енергії, що накопичується L1, L2 - індуктивність обмотки електричної ков конденсаторі, що знижує ККД привода в цілому і тушки і якоря відповідно. збільшує його складність. У свою чергу низький Взаємна індуктивність визначається геометріККД зазначених приводів обумовлює необхідність єю електричної котушки і якоря, їх взаємним розпідведення значної потужності до електричної коташуванням, кількістю витків в обмотці котушки. тушки порівняно невеликого розміру. Велика часЕфективність електродинамічного привода має тина підведеної електричної енергії перетворювелику залежність від величини коефіцієнта магніється в тепло і нагріває привід. Відвід значної тного зв'язку. Чим вище величина коефіцієнта макількості тепла від електродинамічного привода є гнітного зв'язку, тим вище ефективність електроскладною технічною проблемою. Наприклад, у динамічного привода за інших рівних умов. Тому системах електродинамічного штампування котупри створенні електродинамічного привода необшки виконуються з провідника у виді трубки, по хідно намагатись створити таку конструкцію, при якій проходить охолодна рідина. Використання якій коефіцієнт магнітного зв'язку буде максимальподібного рішення для охолодження електродиним, а, отже, і ефективність електродинамічного намічного привода в системах керування технічно привода буде збільшуватися. Однак існуючі консздійснити неможливо в силу невеликих розмірів трукції електродинамічних приводів не повною котушки з порівняно великою кількістю витків промірою відповідають зазначеній вимозі. воду і відповідно малого перерізу проводу. ОхолоТакож на рівень ККД електродинамічного придження тільки зовнішньої поверхні котушки не довода впливає омічний опір електропровідного якозволяє відвести достатню кількість тепла від 7 87116 8 ря. У відомих електродинамічних приводах не видинамічний привід виконаний із двома нерухомими явлене існування граничного для ефективної роелектричними котушками, а штовхачами є дві рухботи електродинамічного привода активного омічливі котушки. Електропровідний якір виконаний у ного опору якоря. Зі збільшенням активного виді однієї з зазначених рухливих котушок, яка омічного опору якоря вихровий струм, що навоявляє собою поршень, виконаний у виді стакана з диться в ньому, зменшується і, відповідно, зменнеферомагнітного матеріалу. Зазначена котушкашується імпульс механічної сили і ККД електродипоршень розміщена між нерухомими котушками, намічного привода. Експериментально було виконана з напрямком витків, протилежним навстановлено, що при перевищенні деякого максипрямку витків першої рухливої котушки і магнітно з мального питомого омічного опору матеріалу винею зв'язана, а з робочим органом, наприклад із хровий струм, що наводиться в якорі, різко зменклапаном, зв'язана механічним і гідравлічним зв'яшується, і, відповідно, зменшуються імпульс зком, причому кожна з рухливих котушок має елекмеханічної сили, що розвивається, і ККД електротричний зв'язок з нерухомою котушкою, яка протидинамічного привода. лежна іншій рухливій котушці. Крім того, на рівень ККД значний вплив справНедоліками описаної конструкції є обмежений ляють геометричні розміри електричної котушки і імпульс сили, обумовлений величиною струмів, які електропровідного якоря, який виконують, наприпідводяться до котушок, величина яких обмежена клад, у виді диска. У відомих електродинамічних можливостями сучасної комутаційної апаратури, і приводах величина імпульсу сили звичайно визнанизький ККД, що не дозволяють забезпечити нечається як величина, пропорційна діаметру котушобхідний імпульс механічної сили, великі габарити ки і рівного їй по діаметрі електропровідного диска. привода, обумовлені наявністю чотирьох котушок, Однак експериментально встановлено, що існує велика енергоємність привода, обумовлена низьмаксимальна величина діаметрів конструктивних ким ККД. Велика електрична потужність, яка піделементів електродинамічного привода, при переводиться до котушок порівняно невеликого розмівищенні якої помітно знижується його ефективру, приводить до того, що велика частина ність. Також на ефективність електродинамічного підведеної електричної енергії перетвориться в привода впливає товщина електричної котушки, тепло і нагріває привід, що значно знижує період оскільки ККД процесу передачі електричної енергії ефективної роботи пристрою і приводить до певід конденсатора в електропровідний диск електредчасного виходу його з ладу. родинамічного привода падає при великій товщині Відомий електродинамічний привід, описаний котушки. Виникнення вихрового струму в диску [в авторському свідоцтві СРСР №1335827], у якостворює магнітне поле диска, яке спрямовано наму електрична енергія перетворюється в лінійне зустріч магнітному полю котушки та в результаті переміщення штовхача привода, який включає зменшує магнітне поле котушки, витісняючи його в електричну котушку і електропровідний якір, взаєпротилежну від диска частину котушки. В резульмодіючий з котушкою при підключенні котушки до таті магнітне поле в диску, з яким взаємодіють імпульсного джерела енергії, яке містить конденвихрові струми диска, зменшується і як наслідок сатор з підключеним до нього комутаційним призменшується механічна сила, що залежить від строєм із блоком керування. При цьому викорисвзаємодії вихрового струму з магнітним полем, товуваний комутаційний пристрій виконаний з створеним у котушці. Існуючі ж електродинамічні можливістю забезпечення роботи конденсатора в приводи найчастіше виконані з неоптимальними коливальному режимі розряду, крім того, у якості розмірами його конструктивних елементів. комутаційного пристрою використовується тирисЩе одним фактором, що обумовлює зазначені тор. недоліки існуючих електродинамічних приводів, є Недоліками описаної конструкції є використе, що у відомих електродинамічних приводах не тання коливального режиму розряду конденсатовраховується вплив феромагнітного матеріалу ра, при якому струм, що проходить через котушку, електропровідного якоря на ефективність електявляє собою одну напівхвилю розрядного імпульсу родинамічного привода. В основному матеріал струму конденсатора. Такий енергетично невигіддиска в тій частині, у якій проникає магнітний потік, ний режим розряду конденсатора приводить до що створюється струмом котушки, є феромагнітвиникнення додаткових струмів, що протікають у ним. В області феромагнітного матеріалу створюзарядному пристрої, що приводить до зниження ється імпульс механічної сили, зворотний за наККД електродинамічного привода в цілому. Крім прямком імпульсу сили, створюваному взаємодією того, використовувані в якості комутаційного приструму якоря з магнітним полем котушки зі струстрою тиристори мають обмеження по швидкості мом, що викликає зменшення створюваного елекнаростання струму. Перевищення цієї швидкості тродинамічним приводом імпульсу механічної синаростання розрядного струму в обмотці котушки ли і його ККД. приводить до необхідності збільшення потужності Відомий електродинамічний привід, описаний комутаційного пристрою для запобігання його теп[в авторському свідоцтві СРСР №684629], у якому лового пробою. Крім того, до недоліків описаної електрична енергія перетворюється в лінійне пеконструкції необхідно віднести виконання електрореміщення штовхача привода, який включає елекпровідного якоря з феромагнітного матеріалу, що тричну котушку і електропровідний якір з неферообумовлює можливість виникнення імпульсу мемагнітного матеріалу принаймні в тій частині ханічної сили зворотного за напрямком імпульсу якоря, у яку проникає магнітне поле котушки, взасили, який створюється взаємодією струму якоря з ємодіючий з котушкою при підключенні котушки до магнітним полем котушки зі струмом, що викликає джерела електричної енергії. При цьому електро 9 87116 10 зменшення створюваного електродинамічним призабезпечити задані переміщення протягом дуже водом імпульсу механічної сили і його ККД. коротких і точно позначених проміжків часу. Найбільш близьким аналогом винаходу, що В якості імпульсного джерела електричної заявляється, є електродинамічний привід, описаенергії застосовується конденсатор з підключеним ний [в патенті РФ №2029129], в якому електрична до нього комутаційним пристроєм із блоком керуенергія перетворюється в лінійне переміщення вання. штовхана привода, який включає електричну коНайважливішим для забезпечення високого тушку і електропровідний якір з неферомагнітного ККД електродинамічного привода є режим розряду матеріалу принаймні в тій частині якоря, в яку ємнісного накопичувача енергії. проникає магнітне поле котушки, взаємодіючий з Переважним є використання аперіодичного котушкою при підключенні котушки до імпульсного режиму розряду конденсатора. При аперіодичному джерела електричної енергії, що містить конденрежимі розряду конденсатора струм у котушці сатор з підключеним до нього комутаційним приелектродинамічного привода наростає швидше, строєм із блоком керування. Комутаційний приніж при коливальному режимі, при рівності початстрій, який використовується в даній конструкції, кової напруги заряду конденсатора. При великих виконаний з можливістю забезпечення роботи швидкостях зміни струму в котушці збільшується конденсатора в коливальному режимі розряду і амплітуда струму в якорі і відповідно росте велиявляє собою тиристор. чина імпульсу механічної сили, що дозволяє заНедоліками описаної конструкції є коливальбезпечити високий рівень ККД, а також необхідну ний режим розряду конденсатора, при якому швидкодію, частоту спрацьовування пристрою і струм, що проходить через котушку, являє собою необхідну точність роботи. Доцільно відключати одну напівхвилю розрядного імпульсу струму конкотушку електродинамічного привода від конденденсатора. Даний режим розряду конденсатора є сатора до або близько до моменту досягнення енергетично невигідним, тому що приводить до струмом котушки максимального значення в облавиникнення додаткових струмів, які протікають в сті максимальної швидкості наростання струму. До зарядному пристрої, що у свою чергу приводить цього моменту напруга на конденсаторі змінюєтьдо зниження ККД електродинамічного привода в ся незначно і досягається найбільша ефективність цілому. Крім того, використовувані в якості комуелектродинамічного привода. таційного пристрою тиристори мають обмеження При аперіодичному розряді конденсатора на по швидкості наростання струму. Перевищення котушку електродинамічного привода навіть при швидкості наростання розрядного струму в обмотмалій величині індуктивності котушки можна одноці котушки приводить до необхідності збільшення часно одержати високу величину ККД і сили, що потужності комутаційного пристрою для запобіганрозвивається електродинамічним приводом. Досяня його теплового пробою. гається це в такий спосіб. У зоні наростання струВ основу винаходу поставлена задача ствому через котушку електродинамічного привода при рення такого електродинамічного привода, який за малій зміні напруги на конденсаторі, котушка елекрахунок простоти та ефективності конструкції, а тродинамічного привода послідовно кілька разів також за рахунок підбору та узгодження параметвідключається і підключається до конденсатора на рів джерела електричної енергії з параметрами короткий час. Електродинамічний привід при цьоконструктивних елементів привода, дозволить му виробляє кілька імпульсів сили з високим ККД забезпечити високий рівень ККД, що у свою чергу кожного імпульсу, необхідний же загальний імдозволить створити необхідний імпульс механічної пульс сили забезпечується додаванням декількох сили, знизити енергоємність пристрою, а також послідовних імпульсів сили. Таке керування потудозволить забезпечити необхідну швидкодію, часжністю привода фізично реалізується за рахунок тоту спрацьовування пристрою і необхідну точпротікання процесу широтно-імпульсної модуляції. ність роботи. В незалежності від параметрів котушки і якоря Поставлена задача вирішується тим, що елекелектродинамічного привода при аперіодичному тродинамічний привід, в якому електрична енергія розряді електролітичного конденсатора може бути перетворюється в лінійне переміщення штовхача отриманий більш вигідний режим роботи електропривода, який включає електричну котушку і елекдинамічного привода, ніж при коливальному ретропровідний якір виконаний з неферомагнітного жимі розряду конденсатора. матеріалу принаймні в тій частині якоря, у яку проКрім того, при використанні аперіодичного реникає магнітне поле котушки, взаємодіючий з кожиму розряду конденсатора стає можливим викотушкою при підключенні котушки до імпульсного ристання енергоємних електролітичних конденсаджерела електричної енергії, яке містить конденторів, для яких режим неглибокого розряду сатор з підключеним до нього комутаційним привідповідає їх звичайному режиму роботи у якості строєм із блоком керування, при цьому включає N фільтру в блоках живлення. Керування зусиллям, що розвивається електелектричних котушок, при цьому N³1, і K електрородинамічним приводом, здійснюється в слабкопровідних якорів, при цьому K³1 а комутаційний струмовому колі керування часом відкриття і запристрій виконаний з можливістю забезпечення криття комутаційного пристрою, а не шляхом часткового розряду конденсатора в аперіодичному керування напругою заряду конденсатора, що зарежимі розряду. безпечує істотні переваги електродинамічного Забезпечення конструкцією електродинамічнопривода зазначеної конструкції за частотою спраго привода перетворення електричної енергії в цьовування пристрою і необхідною точністю роболінійне переміщення штовхача привода дозволяє 11 87116 12 ти, значно зменшує складність і вартість комутазниження швидкодії, припустимої частоти спраційного пристрою. цьовування пристрою і точності роботи. В якості комутаційного пристрою доцільне виЯкір може бути виконаний із плоским торцем користання транзистора. Найбільша ефективність або може мати кільцеву канавку на торці, звернеелектродинамічного привода досягається при веному до котушки, при цьому якір розташований на ликих швидкостях зміни струму в котушці. Тому котушці таким чином, що забезпечується охоплендоцільно відключати котушку електродинамічного ня котушки до площини симетрії котушки, яка перпривода від конденсатора до або близько до мопендикулярна осі котушки. менту досягнення струмом котушки максимальноПереважним є виконання електродинамічного го значення. До цього моменту напруга на конденпривода з висотою електричної котушки меншою саторі змінюється незначно. Така комутація ніж 3мм. ККД процесу передачі електричної енергії котушки електродинамічного привода і ємнісного від конденсатора в диск електродинамічного принакопичувача дає наступні принципові переваги вода падає при великій висоті котушки. Виникненроботи електродинамічного привода: багаторазоня вихрового струму в диску створює магнітне повим підключенням-відключенням конденсатора в ле диска, що спрямовано назустріч магнітному точці максимального енергетичного ККД можна полю котушки і приводить до зменшення магнітнозабезпечити необхідну величину механічного зуго поля котушки, витісняючи його в протилежну від силля електродинамічного привода для досягнендиска частину котушки. В результаті магнітне поле ня максимально можливого ККД при оптимальнов диску, з яким взаємодіють вихрові струми диска, му сполученні інших параметрів зменшується і внаслідок цього зменшується мехаелектродинамічного привода. Здійснення комутації нічна сила, що залежить від взаємодії вихрового такого типу, що забезпечує усі вищевказані переструму з магнітним полем, створеним у котушці. ваги електродинамічного привода, забезпечується Виконання електричної котушки з висотою менсаме за рахунок використання транзисторів. шою ніж 3мм дозволяє запобігти виникненню заПереважним є використання транзисторів, визначеного несприятливого ефекту. Крім того, краконаних по IGBT технології (IGBT - Insulated Gate щим є виконання електродинамічного привода з Bipolar Transistors). IGBT транзистор являє собою діаметром котушки менше ніж 20мм, і відповідно біполярний транзистор з ізольованим затвором електропровідного диска з діаметром менше ніж цілком керований напівпровідниковий прилад, в 20мм. При рівності діаметрів котушки і диска, зі основі якого тришарова структура. Його включення зменшенням цих діаметрів до найбільш переважі відключення здійснюються подачею і зняттям них максимальна амплітуда імпульсу сили росте і позитивної напруги між затвором і джерелом. при діаметрі меншому ніж 20мм має максимальну Крім того, застосування комутаційного привеличину. При величині діаметрів більше 20мм строю зазначеного типу дозволяє здійснювати відбувається значне зниження ефективності елекпозиціонування електродинамічного привода шлятродинамічного привода внаслідок зниження вехом подачі серії імпульсів струму на котушку зі личини імпульсу механічної сили, що приводить до струмом. зниження рівня ККД, що у свою чергу не дозволяє Штовхачем електродинамічного привода може забезпечити необхідну швидкодію, частоту справиступати як електрична котушка, так і електроцьовування пристрою і необхідну точність роботи. провідний якір. Якір може бути виконаний у формі Переважним є виконання котушки з обмоткою, циліндра (гільзи) або диска. Таке конструктивне виконаною зі стрічки прямокутного перерізу, шировиконання електродинамічного привода дозволяє ка сторона стрічки якої при цьому розміщена в застосовувати його в різних областях техніки та в площині, перпендикулярній осі котушки. При цьому пристроях різного призначення. стає можливою конструкція електродинамічного Доцільно для виготовлення електропровідного привода, коли відсутній спеціальний шар ізоляції якоря застосовувати неферомагнітний матеріал між обмоткою котушки і поверхнею диска, що допринаймні в тій частині якоря, у яку проникає магзволяє додатково збільшити величину коефіцієнта нітний потік, який створюється струмом котушки. магнітного зв'язку. Таке виконання якоря виключає можливість виниУ використовуваних конструкціях електродикнення імпульсу механічної сили, зворотного за намічних приводів відоме застосування котушки, напрямком імпульсу сили, створюваному взаємообмотка якої виконана зі стрічки прямокутного педією струму диска з магнітним полем котушки зі рерізу. При цьому збільшується коефіцієнт заповструмом, що у свою чергу дозволяє забезпечити нення об'єму котушки електропровідним матеріависокий рівень ККД електропривода, а, отже, долом, відповідно, зменшується активний омічний зволить забезпечити необхідну швидкодію, частоопір обмотки котушки, збільшується коефіцієнт ту спрацьовування пристрою і необхідну точність магнітного зв'язку, тому що котушка може бути роботи. виконана меншої товщини в порівнянні з котушПереважним є виконання електропровідного кою, обмотка якої виконана з проводу круглого якоря з діаметром, близьким до діаметра котушки. перерізу. У відомих конструкціях обмотка котушки Це обумовлено тим, що виконання електропровідзі стрічки прямокутного перерізу виконується таного якоря, наприклад, у формі прямокутної пласким чином, що широка сторона стрічки знаходитьтини з діагоналями більшими ніж діаметр котушки, ся в площині, рівнобіжній осі котушки. Це є істотприводить до виникнення в електропроводному ним недоліком даної конструкції обмотки котушки, якорі імпульсу сили, що має напрямок, зворотний при застосуванні в електродинамічному приводі імпульсу сили відштовхування, що у свою чергу через велику кількість причин. Діюча частота розприводить до зниження ККД пристрою, а отже до рядного струму конденсатора, який протікає через 13 87116 14 обмотку котушки, викликає ефект витиснення вихровий струм, що наводиться в якорі, різко зместруму в перерізі витка. У застосовуваній плоскій ншується, і, відповідно, зменшуються імпульс мекотушці цей ефект витиснення току буде пропорханічної сили, що розвивається, і ККД електродиційний тому розміру стрічки витка, що знаходиться намічного привода. в площині, паралельній осі котушки. Таким чином, Фіг.1 - поперечний розріз одного з варіантів ефект витиснення струму в розглянутій котушці виконання електродинамічного привода, де штовбуде пропорційний ширині стрічки. При реальних хачем є електропровідний якір, виконаний у виді діючих частотах струму розряду конденсатора, диска. ефект витиснення струму приводить до зростання Фіг.2 - поперечний розріз одного з варіантів активного омічного опору обмотки котушки в кілька виконання електродинамічного привода, де штовразів. Ефективність і ККД електродинамічного хачем є електропровідний якір, виконаний у виді привода з котушкою такої конструкції істотно змедиска з кільцевою канавкою на торці. ншуються. Фіг.3 - поперечний розріз одного з варіантів Електродинамічний привід може містити одну виконання електродинамічного привода, де штовелектричну котушку та один електропровідний хачем можуть бути як електрична котушка так і якір, що є штовхачем і виконаний у виді диска або електропровідний якір, виконаний у виді диска. циліндра (гільзи), тобто при цьому кількість котуФіг.4 - поперечний розріз одного з варіантів шок N і кількість електропровідних якорів K доріввиконання електродинамічного привода, де штовнює 1. хачем можуть бути як електрична котушка так і Також привід може містити одну електричну електропровідний якір, виконаний у виді диска з котушку і два електропровідних якорі, при цьому кільцевою канавкою на торці. штовхачем може бути або один із зазначених елеФіг.5 - поперечний розріз одного з варіантів ктропровідних якорів, або обидва якоря одночасвиконання електродинамічного привода, виконаноно. Також привід може містити дві електричні кого у виді набору послідовно встановлених електтушки та один електропровідний якір, при цьому ричних котушок і електропровідних якорів, виконакотушки підключаються до джерела імпульсу них у виді диска. струму поперемінно для забезпечення роботи Фіг.6 - схема електродинамічного привода для привода, як у прямому, так і в зворотному напрямроботи в режимі аперіодичного розряду конденсаку. Також привід може містити набір послідовно тора. встановлених котушок і якорів, при цьому штовхаНа Фіг.1 представлений поперечний розріз одчами можуть бути один чи обидва з крайніх якорів ного з варіантів виконання електродинамічного або котушок. Таким чином, при зазначених конспривода. Електродинамічний привід включає електрукціях електродинамічного привода кількість N тричну котушку 1 і штовхач привода 2, яким є елекотушок або K електропровідних якорів буде більктропровідний якір, виконаний у виді диска, прише 1. чому диск є плоским. Доцільне виконання електропровідного якоря На Фіг.2 представлений поперечний розріз одзі співвідношенням між його індуктивним і активного з варіантів виконання електродинамічного ним опорами при еквівалентній діючій частоті не привода. Електродинамічний привід включає елекменш ніж 5. Це зв'язано з тим, що при збільшенні тричну котушку 1 і штовхальник привода 2, яким є діючої частоти струму в якорі струм перестає бути електропровідний якір, виконаний у виді диска з рівномірно розподіленим по перерізу якоря. Густикільцевою канавкою на торці. на струму стає більшою в шарах, які знаходяться На Фіг.3 представлений поперечний розріз одближче усього до поверхні якоря, прилягаючої до ного з варіантів виконання електродинамічного котушки. Фізично це відповідає збільшенню питопривода. Електродинамічний привід включає елекмого активного опору матеріалу якоря. Якщо актитричну котушку 1 і два електропровідних диски 2 і вний опір якоря буде за значенням близьким до 3, причому диски є плоскими. При реалізації заіндуктивного опору, дорівнюватиме або буде бізначеної конструкції у якості штовхача привода льше його, ефективність роботи привода буде може виступати електрична котушка 1, при цьому різко падати. Це пояснюється зрушенням по фазі один з дисків 2 або З виконується нерухомим, а вектора імпульсу наведеного струму в якорі щодо інший також є штовхачем. Крім того, зазначена вектора імпульсу струму в котушці в процесі розконструкція може бути реалізована шляхом викоряду ємнісного накопичувача, відповідно зміщаристання у якості штовхача двох дисків 2 і 3 одноються максимальні значення індукції магнітного часно. поля в котушці і наведеного струму в якорі. Це На Фіг.4 представлений поперечний розріз одприводить до зменшення механічної сили, яка виного з варіантів виконання електродинамічного значається взаємодією струму в якорі з магнітним привода. Електродинамічний привід включає елекполем котушки в розглянутий момент часу. тричну котушку 1 i два електропровідних диски 2 і Переважним є виконання якоря з матеріалу, 3, причому диски виконані з кільцевою канавкою що має питомий омічний опір менш ніж 2,7-10на торці. При реалізації зазначеної конструкції у якості штовхача привода може виступати електри8Ом×м. Зі збільшенням активного омічного опору чна котушка 1, при цьому один з дисків 2 або 3 диска, вихровий струм, що наводиться в диску, виконується нерухомим, а інший також є штовхазменшується і, відповідно, зменшується імпульс чем. Крім того, зазначена конструкція може бути механічної сили і ККД електродинамічного привореалізована шляхом використання у якості штовда. Експериментально встановлено, що при перехачів двох дисків 2 і 3 одночасно. вищенні максимального питомого омічного опору матеріалу диска, що має значення 2,7-10-8Ом×м, 15 87116 16 На Фіг.5 представлений поперечний розріз одрюваних вихрових струмів у корпусних деталях і ного з варіантів виконання електродинамічного т.п.Частина електромагнітної енергії, яка залишипривода. Зазначена конструкція виконана у виді лася, створює електромагнітне поле навколо обнабору послідовно встановлених електричних комотки електродинамічного привода, і тим самим тушок 1 і електропровідних якорів 2, виконаних у здійснюють часткову передачу індуктивним шлявиді диска, причому диск виконаний плоским. хом електромагнітної енергії в штовхач електроНа Фіг.6 представлена схема електродинамічдинамічного привода, яким у даному варіанті здійного привода для роботи в режимі аперіодичного снення винаходу є електропровідний якір, який розряду конденсатора. На схемі представлена виконують у виді диска. Проникаючий у електроелектрична котушка L1, підключена до конденсапровідний диск, який виконують з неферомагнітнотора С, а також електропровідний якір L2. У якості го матеріалу в той його частині, у яку проникає комутаційного пристрою використовується IGBT магнітне поле котушки, перемінний електромагніттранзистор. ний потік наводить у зазначеному диску вихровий Робота електродинамічного привода в одному струм, що, взаємодіючи з магнітним потоком, який з варіантів його виконання здійснюється в такий проникнув у диск, створює імпульс механічної сиспосіб. ли. При цьому виконується відштовхування електПеретворення електричної енергії в лінійне ропровідного диска від котушки, за рахунок чого переміщення штовхача привода здійснюють шляздійснюють необхідний вплив на переміщуваний хом подачі в нерухому електричну котушку 1 імпуоб'єкт. льсу струму від імпульсного джерела електричної Таким чином, винахід, що заявляються, преденергії. Попередньо здійснюють накопичення енеставляє собою електродинамічний привід, що за ргії, яка перетворюється в імпульс механічної сили рахунок простоти та ефективності конструкції, а за допомогою конденсатора. При включенні комутакож за рахунок підбирання та узгодження паратаційного пристрою, у якості якого використовують метрів джерела електричної енергії з параметрами транзистор, конденсатор частково розряджають на конструктивних елементів привода, забезпечить електричну котушку 1. Таким чином, здійснюють високий рівень ККД, що у свою чергу дозволить перехід частини запасеної в конденсаторі електстворити необхідний імпульс механічної сили, зниричної енергії в електромагнітну енергію обмотки зити енергоємність пристрою, а також дозволить електричної котушки 1. Частина запасеної енергії забезпечити необхідну швидкодію, частоту справитрачається на нагрівання провідників котушки 1, цьовування пристрою і необхідну точність роботи. а також витрачається на теплові втрати від ство 17 Комп’ютерна верстка Т. Чепелева 87116 Підписне 18 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectrodynamical drive
Автори англійськоюKorohodskyi Volodymyr Anatoliiovych, Kyryliuk Ihor Olehovych, Lomov Serhii Heorhiiovych
Назва патенту російськоюЭлектродинамический привод
Автори російськоюКорогодский Владимир Анатольевич, Кирилюк Игорь Олегович, Ломов Сергей Георгиевич
МПК / Мітки
МПК: F02M 51/00
Мітки: привід, електродинамічний
Код посилання
<a href="https://ua.patents.su/9-87116-elektrodinamichnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний привід</a>
Електродинамічний привід

Номер патенту: 16248
Опубліковано: 17.07.2006
Автори: Корогодський Володимир Анатолійович, Ломов Сергій Георгійович, Кирилюк Ігор Олегович
МПК: H01H 15/00
Мітки: привід, електродинамічний
Формула / Реферат:
1. Електродинамічний привід, у якому електрична енергія перетворюється в лінійне переміщення штовхача приводу, що включає електричну котушку і електропровідний якір, виконаний з неферомагнітного матеріалу принаймні в тій частині якоря, в яку проникає магнітне поле котушки, взаємодіючий з котушкою при підключенні котушки до імпульсного джерела електричної енергії, що містить конденсатор з підключеним до нього комутаційним пристроєм із блоком...
Електродинамічний вібратор

Номер патенту: 45161
Опубліковано: 15.03.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку,...
Електродинамічний вібратор

Номер патенту: 60648
Опубліковано: 15.10.2003
Автор: Пузько Ігор Данилович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, форсуючий блок, перший, другий і третій суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, яке має послідовно сполучені датчик переміщення рухомої платформи з котушкою і блок...
Комбінований привід комутаційного апарата
Номер патенту: 59153
Опубліковано: 15.08.2003
Автор: Гільов Олександр Олександрович
МПК: H01H 1/00, G05F 3/02, H01H 33/66
Мітки: апарата, комутаційного, привід, комбінований
Формула / Реферат:
1. Комбінований привід комутаційного апарата, що містить корпус з феромагнітного матеріалу та якір з того ж матеріалу, що переміщується усередині котушки, який відрізняється тим, що на якорі виконана проточка з розміщеним у ній кільцем із провідного неферомагнітного матеріалу.2. Комбінований привід комутаційного апарата за п. 1, який відрізняється тим, що котушка не охоплює область переміщення якоря.3. Комбінований привід...
Електродинамічний вібратор
Номер патенту: 44517
Опубліковано: 15.02.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, яка жорстко з'єднана з платформою вібратора з випробуваним об'єктом, задавальний генератор, вихід якого під'єднаний до входу другого суматора через перший суматор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної...
Попередній патент: Ацетоновий сольват диметоксидоцетакселу і спосіб його отримання
Наступний патент: Застосування пептидних сполук для лікування центрального невропатичного болю
Випадковий патент: Спосіб оптимізації розумової працездатності у дітей