Електродинамічний вібратор
Номер патенту: 45161
Опубліковано: 15.03.2002

Формула / Реферат
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку, вихід якого сполучений з другим входом другого суматора, вихід якого через підсилювач струму сполучений з рухомою котушкою, вихід датчика переміщення рухомої котушки сполучений з входом першого блока диференціювання, вихід якого сполучений з входом другого блока диференціювання, який відрізняється тим, що він додатково містить перший, другий, третій, четвертий і п'ятий підсилювачі напруги, форсуючий блок, третій блок диференціювання і третій суматор, причому вихід задавального генератора через послідовно з'єднані перший підсилювач напруги і форсуючий блок сполучений з першим входом першого суматора, другий вхід якого через третій блок диференціювання сполучений з виходом третього суматора, перший вхід якого через другий підсилювач напруги сполучений з виходом датчика переміщення рухомої циліндричної котушки, другий вхід через третій підсилювач напруги сполучений з виходом першого блока диференціювання, а третій вхід через четвертий підсилювач напруги сполучений з виходом другого блока диференціювання, вихід датчика переміщення рухомої циліндричної котушки через п'ятий суматор сполучений з третім входом першого суматора.
Текст
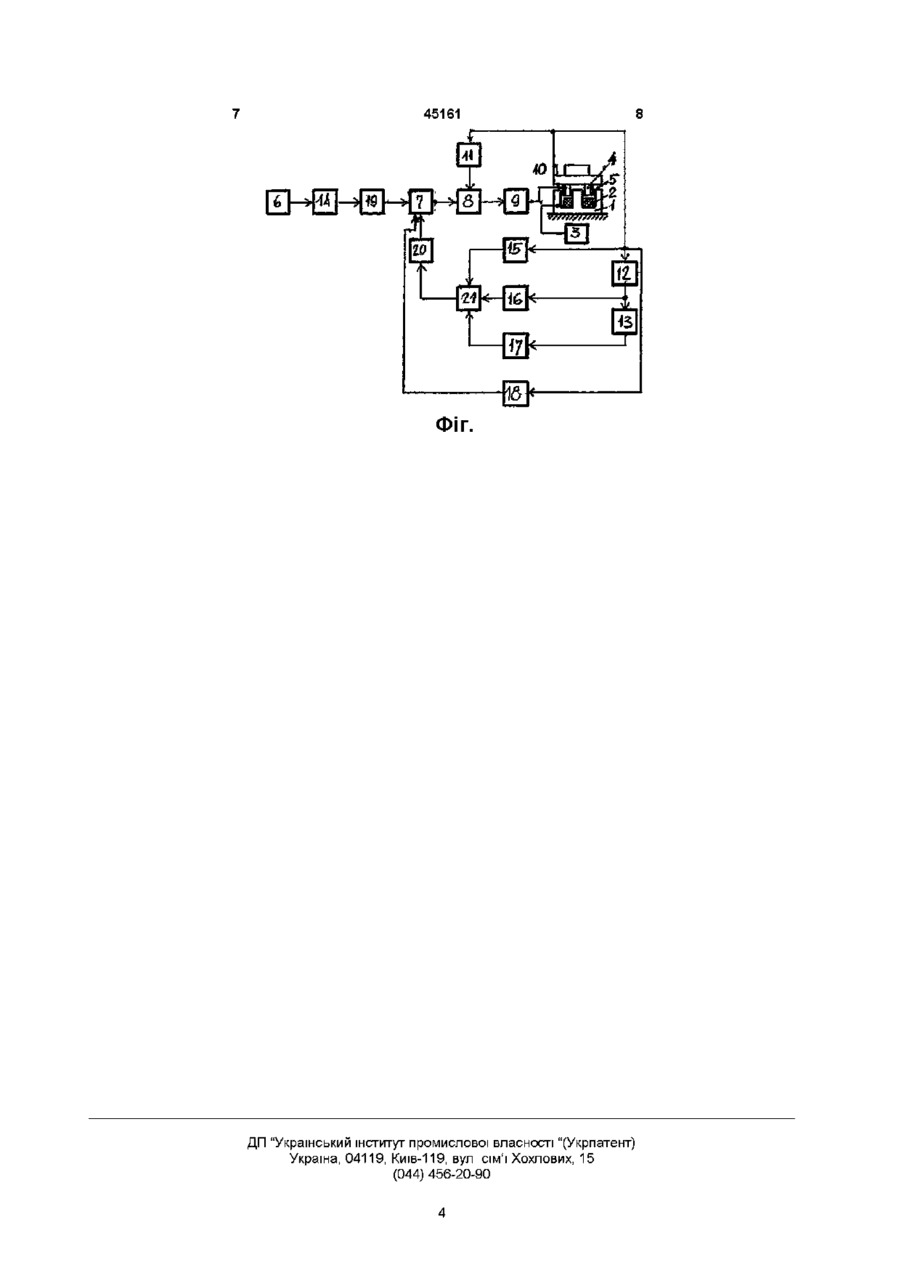
Електродинамічний вібратор, що містить магнггопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку, вихід якого сполучений з другим входом другого суматора, вихід якого через підсилювач струму сполучений з рухомою котушкою, вихід датчика переміщення рухомої коту шки сполучений з входом першого блока диференціювання, вихід якого сполучений з входом другого блока диференціювання, який відрізняється тим, що він додатково містить перший, другий, третій, четвертий і п'ятий підсилювачі напруги, форсуючий блок, третій блок диференціювання і третій суматор, причому вихід задавального генератора через послідовно з'єднані перший підсилювач напруги і форсуючий блок сполучений з першим входом першого суматора, другий вхід якого через третій блок диференціювання сполучений з виходом третього суматора, перший вхід якого через другий підсилювач напруги сполучений з виходом датчика переміщення рухомої циліндричної котушки, другий вхід через третій підсилювач напруги сполучений з виходом першого блока диференціювання, а третій вхід через четвертий підсилювач напруги сполучений з виходом другого блока диференціювання, вихід датчика переміщення рухомої циліндричної котушки через п'ятий суматор сполучений з третім входом першого суматора Винахід відноситься до області вібраційної техніки, а саме, до електродинамічних збуджувачів коливань і може знайти застосування як джерело механічних коливань в стендах для віброзбудження і моделювання різних типів вібраційних навантажень Відомим Є електродинамічний вібратор, що містить магнггопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнггопровода рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, задавальний генератор, вихід якого під'єднаний до обмотки рухомої котушки через послідовно сполучені перший і другий суматори, і підсилювач струму, два послідовно сполучені блоки диференціювання, виходи кожного з яких сполучені з входами першого суматора, а також коло зворотного зв'язку , що містить послідовно сполучені датчик переміщення рухомої системи вібратора і блок зворотного зв'язку, вихід якого сполучений з другим входом другого сумато ра (Ав св СРСР № 546386 , МПК В06В 1/04, 1977) Недоліком відомого електродинамічного вібратора є недостатні функціональні можливості, що пояснюється неможливістю задавати випробуваному об'єкту навантаження, які змінюються по закону сигналу на виході задавального генератора Такий недолік пояснюється тим, що логічна структура пристрою не забезпечує реалізацію алгоритму для вирішування завдання формування заданого силового навантаження на випробуваний об'єкт Найбільш близьким до заявляемого по технічній суті і результатах, що отримуються, є електродинамічний вібратор, що містить магнггопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнггопровода рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, задавальний генератор, вихід якого під'єднаний до обмотки рухомої котушки через послідовно сполучені перший і другий суматори, і підсилю (О ю 45161 вач струму, два послідовно сполучених блока диференціювання, виходи кожного з яких сполучені з входами першого суматора, а також коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення циліндричної рухомої котушки вібратора і блок зворотного зв'язку, вихід якого сполучений з другим входом другого суматора, а вихід датчика переміщення рухомої котушки вібратора сполучений з входом першого блока диференціювання і з четвертим входом першого суматора (Авсв СРСР№ 623585, МПК В06В 1/04, 1978) Недоліком відомого пристрою є недостатня точність формування заданого силового навантаження на випробуваний об'єкт, що пояснюється недостатньою точністю прийнятої математичної моделі електродинамічного вібратора, яка враховує тільки механічну частину його функціонування і не враховує процеси, що відбуваються в обмотці рухомої котушки, що також призводить до зменшення ККД В основу винаходу поставлено задачу створити такий електродинамічний вібратор, в якому за рахунок нової структурної схеми, що моделює процеси в механічній і електричній системі вібратора, підвищується точність формування заданого силового навантаження на випробуваний об'єкт, що призводить до збільшення ККД пристрою Поставлена задача вирішується тим, що електродинамічний вібратор, що містить магнггопровід з обмоткою підмагнічування, установлену в повггряному зазорі магнггопровода рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, перший і другий суматори, підсилювач струму, перший і другий блоки диференціювання, коло зворотного зв'язку, що містить послідовно сполучені датчик переміщення рухомої циліндричної котушки і блок зворотного зв'язку, вихід якого сполучений з другим входом другого суматора , вихід якого через підсилювач струму сполучений з рухомою циліндричною котушкою, вихід датчика переміщення рухомої котушки сполучений з входом першого блока диференціювання, вихід якого сполучений з входом другого блока диференціювання, згідно винаходу додатково введені перший, другий, третій, четвертий і п'ятий підсилювачі напруги, форсуючий блок, третій блок диференціювання і третій суматор, причому вихід задавального генератора через послідовно з'єднані перший підсилювач напруги і форсуючий блок сполучений з першим входом першого суматора, другий вхід якого через третій блок диференціювання сполучений з виходом третього суматора, перший вхід якого через другий підсилювач напруги сполучений з виходом датчика переміщення рухомої циліндричної котушки, другий вхід через третій підсилювач напруги сполучений з виходом першого блока диференціювання, а третій вхід через четвертий підсилювач напруги сполучений з виходом другого блока диференціювання, вихід датчика переміщення рухомої циліндричної котушки через п'ятий суматор сполучений з третім входом першого суматора Застосування запропонованого електродинамічного вібратора з усіма суттєвими ознаками, включаючи ВІДМІННІ, дозволяє формувати задане силове навантаження на випробуваний об'єкт з більш високою точністю за рахунок врахування не тільки механічного процесу коливань рухомої системи вібратора, але і електричних процесів в обмотці рухомої котушки, що також призводить до збільшення ККД На фігурі приведена структурна схема електродинамічного вібратора Електродинамічний вібратор містить магнггопровід 1 з обмоткою підмагнічування 2, джерело постійного струму 3, установлену в повітряному зазорі магнггопровода 1 рухому циліндричну котушку 4 з обмоткою 5, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, датчик 10 переміщення рухомої циліндричної котушки 4, блок 11 зворотного зв'язку, перший і другий блоки 12 і 13 диференціювання ВІДПОВІДНО, перший, другий , третій , четвертий і п'ятий підсилювачі 14, 15, 16, 17, 18 напруги ВІДПОВІДНО, форсуючий блок 19, третій блок 20 диференціювання, третій суматор 21 Блоки і елементи пристрою з'єднані таким чином Вихід задавального генератора 6 через послідовно з'єднані перший підсилювач 14 напруги і форсуючий блок 19 сполучений з першим входом першого суматора 7, вихід якого через послідовно з'єднані другий суматор 8 і підсилювач 9 струму сполучений з обмоткою 5 рухомої циліндричної котушки 4 На платформі (на фіг не позначена) установлений датчик 10 переміщення рухомої котушки 4, жорстко з'єднаної з платформою з установленим на платформі випробуваним об'єктом ( на фіг не позначений) Вихід датчика 10 переміщення рухомої котушки 4 вібратора через блок 11 зворотного зв'язку сполучений з другим входом другого суматора 8, через другий підсилювач 15 напруги - з першим входом третього суматора 21, а через послідовно з'єднані перший і другий блоки 12, 13 диференціювання ВІДПОВІДНО і четвертий підсилювач 17 напруги - з третім входом третього суматора 21, другий вхід якого через третій підсилювач 16 напруги сполучений з виходом першого блока 12 диференціювання Вихід третього суматора 21 через третій блок 20 диференціювання сполучений з другим входом першого суматора 7, третій вхід якого через п'ятий підсилювач 18 напруги сполучений з виходом датчика 10 переміщення рухомої котушки 4 вібратора Електродинамічний вібратор функціонує наступним чином Живлення обмотки 5 рухомої циліндричної котушки 4 відбувається за рахунок струму з виходу підсилювача струму 9 При цьому рухома котушка 4 вібратора переміщується за рахунок дії електромагнітної сили, що пропорційна струму на виході підсилювача 9 струму Механічне переміщення рухомої циліндричної котушки 4 відбувається по закону, що відповідає в операційній формі диференціальному рівнянню другого порядку, а саме (Мр2 + Ьр + с )Х(р) + R(p) = В1Ік(р), (1) М - маса рухомої системи вібратора разом з випробуваним об'єктом, b - коефіцієнт демпфування, с - коефіцієнт жорсткості рухомої системи, 45161 X(p) - операційне зображення переміщення рухомої системи, К(р) - операційне зображення сили реакції, що діє між випробуваним об'єктом і платформою, жорстко з'єднаною з рухомою котушкою, Bg - магнггна індукція в повітряному зазорі магнггопровода, що формується обмоткою підмагнічування, \ - довжина дроту обмотки рухомої циліндричної котушки, Ік(р) - операційне зображення струму, що протікає в обмотці рухомої циліндричної котушки, р = dldt - оператор диференціювання Електричні процеси в замкнутому колі обмотки 5 рухомої котушки 4 моделюються диференційним рівнянням першого порядку, що в операційній формі має вигляд (pLk+rk) Ik(p) = U(p) - Bs 1кХ(р), (2) де Lk - індуктивність обмотки рухомої циліндричної котушки, гк - опір обмотки рухомої циліндричної котушки, U(p) - операційне зображення напруги, що подається для живлення обмотки рухомої циліндричної котушки Коло зворотного зв'язку, що містить датчик 10 переміщення рухомої циліндричної котушки 4 з платформою і блок 11 зворотного зв'язку, вводиться для створення електромагнггної ПІДВІСКИ З кое фіцієнтом жорсткості "С" Після перетворення системи рівнянь (1) і (2) знаходимо таке рівняння p[MLtp2+(bLk+MTk)p+(cLk+brk+B2b\2k)]X(p)+crkX(p)+( Lk+rk)R(pyU(p)Bd\b P (3) Для формування співвідношення R(p)=KuU(p), (4) де Ки = 5 5 l f c необхідно сформувати структурну схему, алгоритм функціонування якої відповідає співвідношенню (3) Така структурна схема зображена на фіг На виході задавального генератора 6 формується сигнал, що в операційній формі дорівнює U(p) Цей сигнал U(p) через перший підсилювач 14 напруги і форсуючий блок 19 , передатна функція якого дорівнює (pLk+rk), надходить на перший вхід першого суматора 7, на другий вхід якого надходить сигнал з виходу третього суматора 21 після проходження через третій блок 20 диференціювання, на третій вхід першого суматора 7 надходить сигнал з виходу датчика 10 переміщення рухомої циліндричної котушки 4 після проходження через п'ятий підсилювач 18 з коефіцієнтом підсилення, що дорівнює "crk" На перший вхід третього суматора 21 надходить сигнал з виходу датчика 10 переміщення рухомої котушки 4 після проходження через другий підсилювач 15 напруги з коефіцієнтом підсилення , що дорівнює (brk + cLk + B2^\2k) На другий вхід третього суматора 21 надходить сигнал з виходу пер шого блока 12 диференціювання після проходження через третій підсилювач 16 напруги з коефіцієнтом підсилення, що дорівнює (Mrk + bLk) На вхід першого блока 12 диференціювання надходить сигнал переміщення рухомої циліндричної котушки 4 3 виходу датчика 10 переміщення рухомої котушки 4 На третій вхід третього суматора 21 надходить сигнал з виходу першого блока 12 диференціювання після проходження через другий блок 13 диференціювання і четвертий підсилювач 17 напруги з коефіцієнтом підсилення , що дорівнює MLk Сигнал з виходу першого суматора 7 , що дорівнює в операційній формі величині Uex(p) p[MLlp2+(bLk+Mrk)p+(cLk+brk+B26l2k)]X(p)+crkX(p)+ B5\kU(p)(pLk+rk)=UJpX (5) після проходження через другий суматор 8 і підсилювач 9 струму надходить в обмотку 5 рухомої котушки 4, формуючи в обмотці 5 струм , що забезпечує виникнення сили , що діє на рухому котушку 4 Сигнал з виходу датчика 10 переміщення рухомої циліндричної котушки 4 після проходження через блок 11 зворотного зв'язку надходить на другий вхід другого суматора 8, створюючи електромагнггну підвіску рухомої системи (платформи з випробуваним об'єктом і рухомої циліндричної котушки 4) Беручи до уваги співвідношення (3) і (5) і при умові рівності коефіцієнтів при однакових показниках степені р і при умові Uex(p) = B^\kU(p) маємо співвідношення R(p)=B&U(p), (6) тобто сила, що діє на випробуваний об'єкт, дорівнює силі , що задається задавальним генератором НАЙМЕНУВАННЯ ЕЛЕМЕНТІВ ПРИСТРОЮ 1 - магнітопровід 2 - обмотка підмагнічування 3 - джерело постійного струму 4 - рухома циліндрична котушка 5 - обмотка циліндричної котушки 6 -задавальний генератор 7 - перший суматор 8 - другий суматор 9 - підсилювач струму 10 - датчик переміщення рухомої циліндричної котушки 11 - блок зворотного зв'язку 12 - перший блок диференціювання 13 - другий блок диференціювання 14 - перший підсилювач напруги 15 - другий підсилювач напруги 16-третій підсилювач наруги 17 - четвертий підсилювач напруги 18 - п'ятий підсилювач напруги 19 - форсуючий блок 20 - третій блок диференціювання 21 -третій суматор 45161 ФІГ. ДП "Український інститут промислової власності "(Укрпатент) Україна, 04119, Киів-119, вул сім'ї Хохлових, 15 (044) 456-20-90
ДивитисяДодаткова інформація
Автори англійськоюPuz'ko Ihor Danylovych, Khvorost Volodymyr Andriiovych
Автори російськоюПузько Игорь Данилович, Хворост Владимир Андреевич
МПК / Мітки
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Код посилання
<a href="https://ua.patents.su/4-45161-elektrodinamichnijj-vibrator.html" target="_blank" rel="follow" title="База патентів України">Електродинамічний вібратор</a>
Електродинамічний вібратор
Номер патенту: 40446
Опубліковано: 16.07.2001
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович, Павловський Михайло Антонович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більша довжини повітряного зазору, задавальний генератор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної котушки, перший і другий суматори, коло зворотного зв'язку, що складається з послідовно з'єднаних датчика положення рухомої котушки і блока...
Електродинамічний вібратор
Номер патенту: 44517
Опубліковано: 15.02.2002
Автори: Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: вібратор, електродинамічний
Формула / Реферат:
Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопроводу рухому циліндричну котушку, довжина якої більше довжини повітряного зазору, яка жорстко з'єднана з платформою вібратора з випробуваним об'єктом, задавальний генератор, вихід якого під'єднаний до входу другого суматора через перший суматор, підсилювач струму, вихід якого під'єднаний до обмотки рухомої циліндричної...
Електродинамічний вібратор
Номер патенту: 37999
Опубліковано: 15.05.2001
Автори: Пузько Ігор Данилович, Павловський Михайло Антонович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Текст:
...R(p) на випробуваний об'єкт, а саме: 1) сформувати сигнал Х2, операційним зображенням якого є постійного струму, рухому циліндричну котушку 4 з платформою (на кресленні не позначена) та випробуваним об'єктом 5, закріпленим на платформі, задавальний генератор 6, перший суматор 7, другий суматор 8, підсилювач 9 струму, да тчик 10 положення рухомої котушки, блок 11 зворотного зв'язку, підсилювач 12 з регульованим коефіцієнтом підсилення, блок...
Електродинамічний вібратор
Номер патенту: 38228
Опубліковано: 15.05.2001
Автори: Павловський Михайло Антонович, Пузько Ігор Данилович, Хворост Володимир Андрійович
МПК: B06B 1/02
Мітки: електродинамічний, вібратор
Формула / Реферат:
Дата прийняття рішення 28.12.2000р.(21) 2000063371(54) (57) Електродинамічний вібратор, що містить магнітопровід з обмоткою підмагнічування, установлену в повітряному зазорі магнітопровода рухому котушку, довжина якої більше довжини повітряного зазору, задавальний регенератор, вихід якого сполучений з входом першого підсилювача, послідовно з’єднане з обмоткою рухомої котушки, і платформу, на...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Казачковський Микола Миколайович, Савченко Сергій Борисович
МПК: H02P 7/06
Мітки: електропривід, релейним, керуванням
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Попередній патент: Утеплювальна суміш
Наступний патент: Спосіб профілактики та лікування гнійно-запальних ускладнень після лапароскопічних втручань на органах черевної порожнини
Випадковий патент: Механізм пересування люкової кришки