Спосіб дистанційного вимірювання температури повітря
Номер патенту: 93131
Опубліковано: 25.09.2014
Автори: Дєлов Іван Акіндінович, Леонідов Олексій Вікторович, Сліпченко Микола Іванович

Формула / Реферат
Спосіб дистанційного вимірювання температури повітря, у якому випромінюють в атмосферу акустичний імпульс із синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі вдвічі більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, відбиті від акустичних імпульсів, виділяють сигнали із частотою допплерівського зрушення у відбитих акустичними імпульсами електромагнітних коливань, визначають частоти допплерівського зрушення для кожної точки траси, за значенням яких розраховують значення температури для всіх точок траси, причому обвідну акустичного імпульсу формують у вигляді ![]() (де
(де ![]() , а
, а ![]() - коефіцієнт, який означає тривалість імпульсу,
- коефіцієнт, який означає тривалість імпульсу, ![]() - поточний час), який відрізняється тим, що водночас з прийомом електромагнітних коливань від випроміненого акустичного імпульсу ведуть прийом акустичного ехосигналу від цього самого випроміненого акустичного імпульсу, розсіяного температурними неоднорідностями, вимірюють фазу акустичного ехосигналу
- поточний час), який відрізняється тим, що водночас з прийомом електромагнітних коливань від випроміненого акустичного імпульсу ведуть прийом акустичного ехосигналу від цього самого випроміненого акустичного імпульсу, розсіяного температурними неоднорідностями, вимірюють фазу акустичного ехосигналу ![]() і
і ![]() для двох наступних зондувань для того самого часового строба
для двох наступних зондувань для того самого часового строба ![]() для вимірювання змін температури повітря в часі для фіксованої дальності (висоти), а також для того самого зондування вимірюють фази
для вимірювання змін температури повітря в часі для фіксованої дальності (висоти), а також для того самого зондування вимірюють фази ![]() і
і ![]() для двох стробувань за висотою так, що
для двох стробувань за висотою так, що ![]() (де
(де ![]() - тривалість зондувального імпульсу) для отримання висотних змін температури повітря
- тривалість зондувального імпульсу) для отримання висотних змін температури повітря ![]() , причому кожну фазу (
, причому кожну фазу (![]() ,
,![]() ) вимірюють в межах від 0°до 360°, а потім, задавшись для раніше виміряної фази
) вимірюють в межах від 0°до 360°, а потім, задавшись для раніше виміряної фази ![]() температурою повітря
температурою повітря ![]() (якщо, є можливість, її вимірюють), визначають за різницею фаз
(якщо, є можливість, її вимірюють), визначають за різницею фаз ![]() різницю температур
різницю температур ![]() , при цьому приймається, що у формулі для визначення фази ехосигналу
, при цьому приймається, що у формулі для визначення фази ехосигналу ![]() величина
величина ![]() не змінюється в ході вимірювання фаз
не змінюється в ході вимірювання фаз ![]() і
і ![]() для того самого часового строба
для того самого часового строба ![]() , а потім в обчислену в такий спосіб різницю температур вводять поправку на систематичну помилку
, а потім в обчислену в такий спосіб різницю температур вводять поправку на систематичну помилку ![]() , пов'язану насправді з невеликими змінами величини
, пов'язану насправді з невеликими змінами величини ![]()
![]() в ході вимірювання величин
в ході вимірювання величин ![]() і
і ![]() , причому стробування відбувається не тільки за часом, коли для кожного випроміненого акустичного імпульсу акустичний ехосигнал приймається для того самого часового строба
, причому стробування відбувається не тільки за часом, коли для кожного випроміненого акустичного імпульсу акустичний ехосигнал приймається для того самого часового строба ![]() й порівнюються фази ехосигналів
й порівнюються фази ехосигналів ![]() і
і ![]() , отримані для того самого
, отримані для того самого ![]() , але стробування відбувається ще й за дальністю (висотою) на ділянки
, але стробування відбувається ще й за дальністю (висотою) на ділянки ![]() для кожного випроміненого звукового імпульсу, при цьому порівнюють вимірювані фази ехосигналів, отримані для двох сусідніх висот, і за різницею фаз визначають різницю температур, внаслідок чого для кожного випроміненого акустичного імпульсу вимірюють висотний профіль відносної зміни температури повітря, причому оскільки водночас для кожного випроміненого акустичного імпульсу за допомогою радіоакустичного способу вимірюють висотний профіль температури повітря для всієї траси, то на підставі обмірюваної температури повітря для найменшої висоти за допомогою радіоакустичного способу, що збігається з найменшою висотою висотного профілю відносних змін температури повітря, отриманих за допомогою акустичного способу, перераховують отримані відносні зміни температури за допомогою акустичного зондування у дійсні значення, при цьому вимірювання температури повітря (хаотичної швидкості молекул) проводять в певному напрямку за кутом місця й азимутом, що визначається поставленою задачею вимірювань температури.
для кожного випроміненого звукового імпульсу, при цьому порівнюють вимірювані фази ехосигналів, отримані для двох сусідніх висот, і за різницею фаз визначають різницю температур, внаслідок чого для кожного випроміненого акустичного імпульсу вимірюють висотний профіль відносної зміни температури повітря, причому оскільки водночас для кожного випроміненого акустичного імпульсу за допомогою радіоакустичного способу вимірюють висотний профіль температури повітря для всієї траси, то на підставі обмірюваної температури повітря для найменшої висоти за допомогою радіоакустичного способу, що збігається з найменшою висотою висотного профілю відносних змін температури повітря, отриманих за допомогою акустичного способу, перераховують отримані відносні зміни температури за допомогою акустичного зондування у дійсні значення, при цьому вимірювання температури повітря (хаотичної швидкості молекул) проводять в певному напрямку за кутом місця й азимутом, що визначається поставленою задачею вимірювань температури.
Текст
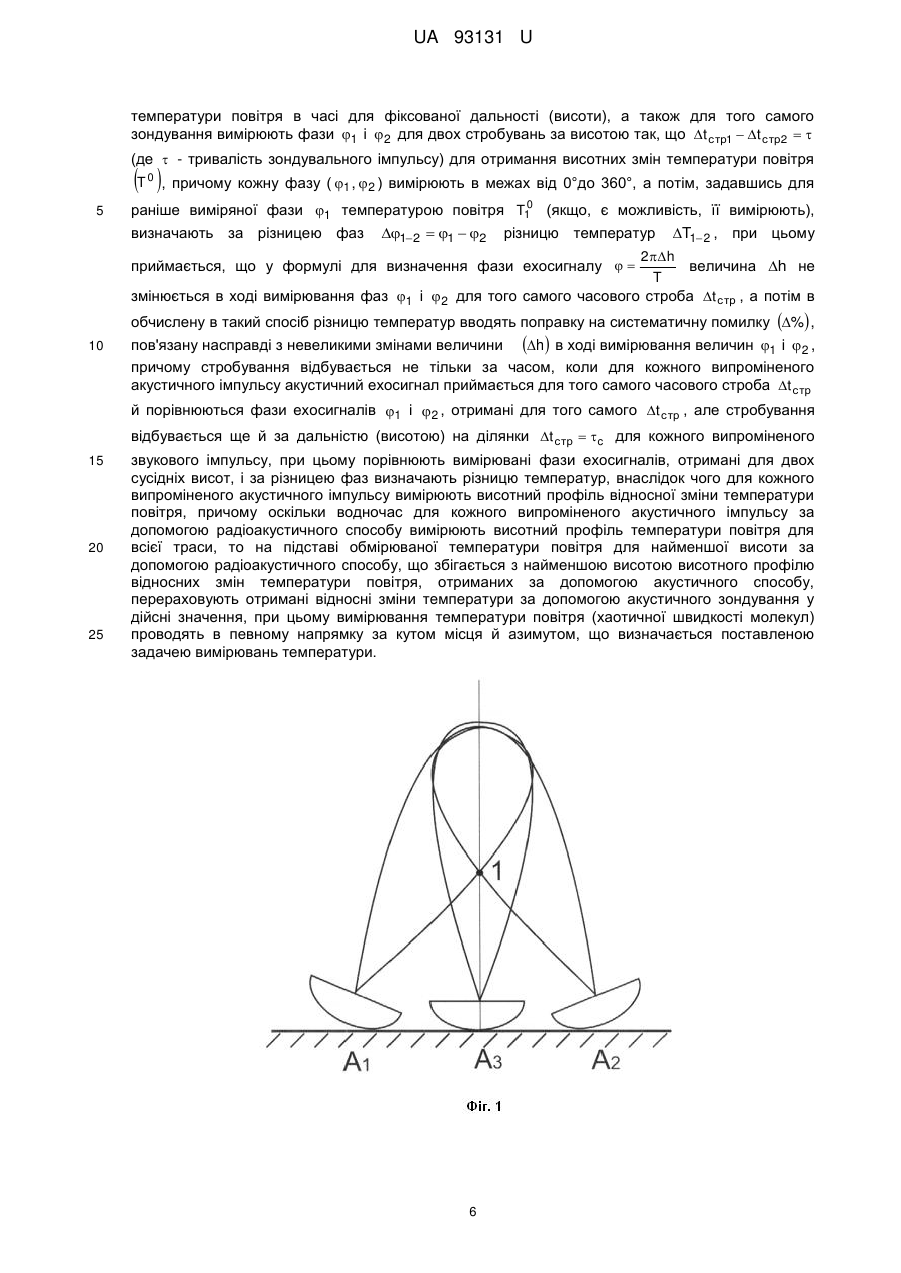
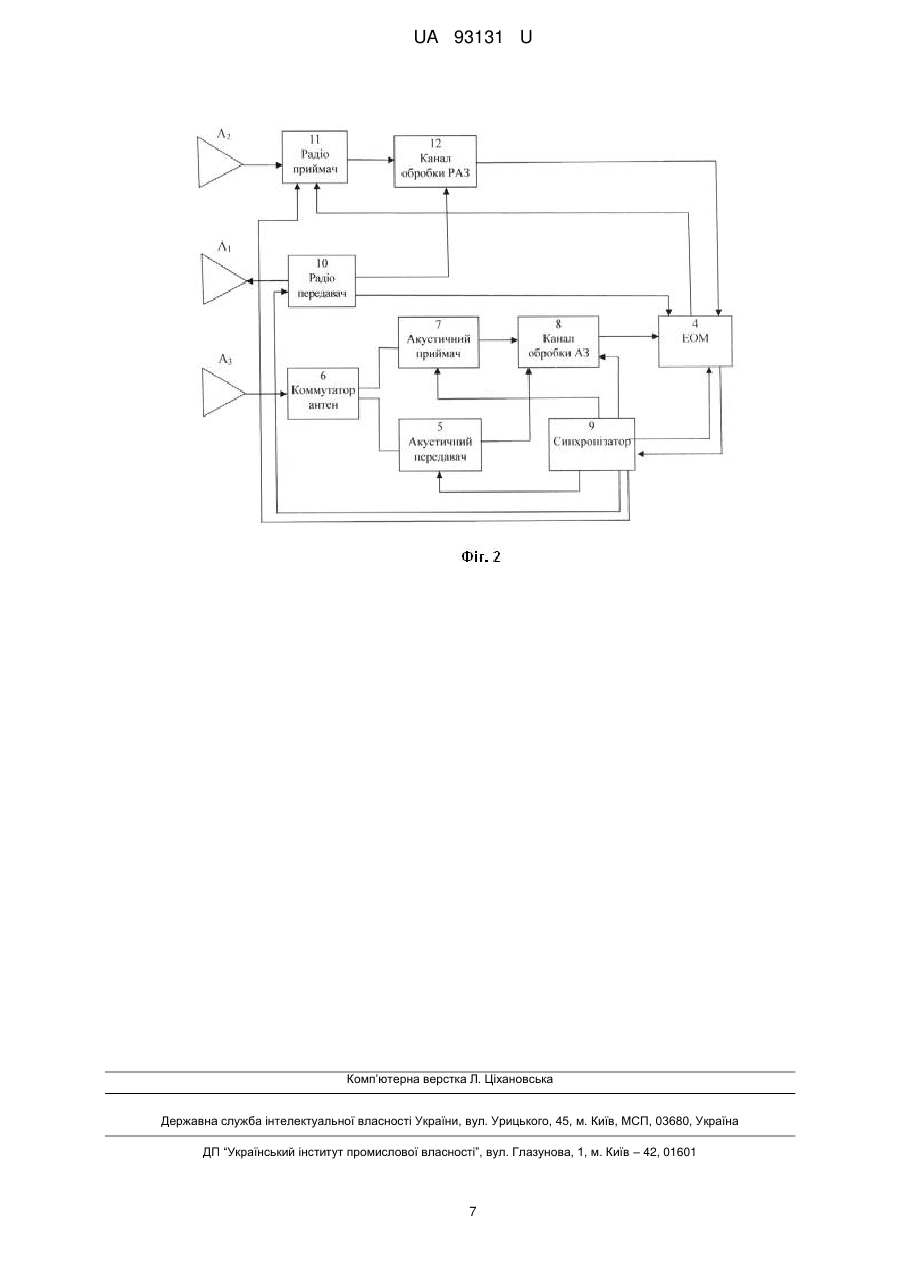
Реферат: UA 93131 U UA 93131 U 5 10 15 20 25 Корисна модель належить до радіолокаційної метеорології, а саме до акустичного й радіоакустичного способу дистанційного вимірювання параметрів атмосфери, і може бути використана під час складання радіокліматичних карт у роботах з контролю забруднення атмосфери, а також в аеропортах для прогнозування сприятливої ситуації під час зльоту й посадки літаків. Відомий спосіб дистанційної реєстрації вертикального профілю температури повітря радіоакустичним зондуванням атмосфери (Патент України № 89342 Спосіб дистанційної реєстрації вертикальних профілів температури повітря радіоакустичним зондуванням атмосфери. Опубл. 11.01.2010 Бюл. № 1), який полягає в тому, що випромінюють вертикально вгору акустичний імпульс із синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі вдвічі більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, відбиті від акустичних імпульсів, виділяють сигнали із частотою доплерівського зрушення, відбитих акустичними імпульсами електромагнітних коливань, визначають частоти доплерівського зрушення для кожної точки траси, за значенням яких розраховують температури повітря для всіх точок траси, за робочою формулою. Причому огинаючу акустичного імпульсу формують у вигляді sin x / x (де x kt , а k - коефіцієнт, що означає тривалість імпульсу, t - температура повітря). Недоліком цього способу є те, що за наявності сильного вітру випромінений акустичний пакет хвиль виноситься з поля діаграми спрямованості радіолокатора і прийом розсіяної радіохвилі акустичним імпульсом стає неможливим. Крім того, за інтенсивних пульсацій атмосфери турбулентного характеру зросте помилка вимірюваної температури повітря за допомогою системи радіоакустичного зондування за рахунок деформації випроміненого пакета акустичних хвиль. Найбільш близьким аналогом за технічною суттю до заявленого є спосіб вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, який полягає в тому, що при імпульсному моностатичному акустичному зондуванні атмосфери для заданого часовим стробом t стр часу послідовно вимірюють фазу акустичного ехосигналу 1 і 2 , причому кожна фаза 1 і 2 вимірюється в межах від 0° до 360°. А потім, задавшись для раніше виміряної фази 1 температурою повітря T (якщо є можливість, вимірюють її), 30 визначають за різницею вимірюваних фаз 1 2 1 2 різницю температур T1 2 . При цьому приймається, що у формулі для визначення фази ехосигналу 2h величини h не змінюються під час вимірювання 1 і 2 для того самого часового строба t стр . А потім в обчислену в такий спосіб різницю температур вводиться виправлення на систематичну помилку % , пов'язану насправді з невеликими змінами значення h під час вимірювання величини 35 40 45 1 і 2 . (Делов И.А., Слипченко Н.И., Леонидов А.В. Новое направление в акустическом зондировании атмосферы: Монография. - Харьков, 2012, НТМТ. - 108 с.) Недоліком такого способу є те, що за відсутності вітру, а отже за відсутності температурних неоднорідностей турбулентного характеру, що розсіюють випромінені акустичні хвилі, неможливо спостерігати акустичний ехосигнал, а відтак вести вимірювання температури повітря за допомогою акустичного зондування. Крім того, недоліком акустичного способу вимірювання температури повітря є й те, що при цьому способі вимірюється відносна зміна температури повітря шляхом порівняння фаз ехосигналів, отриманих під час двох наступних зондуваннях атмосфери. В основу корисної моделі поставлена задача усунути перераховані вище недоліки цих способів. Крім того, з огляду на нещодавно виявлене нове явище в атмосфері Землі анізотропію 50 молекулярних процесів у нейтральній атмосфері, вимірювання температури повітря T , яка m 2 T 2 відомим співвідношенням , необхідно пов'язана з хаотичною швидкістю молекул проводити у чітко заданому напрямку, тому що для різних напрямків ця величина може бути різною. Поставлена задача вирішується тим, що у способі дистанційного вимірювання температури повітря за допомогою системи одночасного радіоакустичного (РАЗ) і акустичного (АЗ) 1 UA 93131 U 5 зондування, згідно з корисною моделлю, водночас ведеться прийом радіоехосигналу, відбитого від випроміненого акустичного пакета хвиль і прийом акустичного ехосигналу від цього самого акустичного пакета хвиль, розсіяних температурними неоднорідностями. Потім для прийнятих електромагнітних коливань, відбитих від акустичних імпульсів, виділяють сигнали із частотою доплерівського зрушення, відбитих акустичними імпульсами електромагнітних коливань, визначають частоти доплерівського зрушення для кожної точки траси, за значенням яких розраховують значення температури повітря, для всіх точок траси за робочою формулою. Для прийнятих акустичних ехосигналів, отриманих для двох наступних вимірювань, визначають фазу акустичних ехосигналів щодо опорного (випроміненого сигналу) 1 і 2 . 10 Причому кожну фазу ( 1 і 2 ) вимірюють в межах від 0° до 360°. А потім, задавшись для раніше виміряної фази 1 температурою повітря T , за якої обмірювана ця фаза (або, якщо є можливість, вимірюють її), визначають за різницею вимірюваних фаз 1 2 1 2 різницю 15 20 температур T1 2 . При цьому приймається, що у формулі для визначення фази ехосигналу 2h величини h не змінюються під час вимірювання 1 і 2 для того самого часового строба t стр . А потім в обчислену в такий спосіб різницю температур вводять виправлення на систематичну помилку % , пов'язану насправді з невеликими змінами значення h під час вимірювання величин 1 і 2 2. Після чого для кожного каналу (для каналу РАЗ і AЗ) за спеціальним алгоритмом обчислюють температуру повітря. Нижче наведені робочі формули для обчислення температури повітря для кожного каналу (каналу РАЗ і каналу AЗ). Робоча формула для обчислення температури повітря в каналі РАЗ: 2fa T C 273,15 K , 204f q де f - частота електромагнітних коливань; fa - частота звукових коливань; 25 q - значення параметра Брега; a - коефіцієнт, що залежить від вологості повітря; 30 35 40 T C - температура повітря за Цельсієм; q a 2a . Реєстрацію вертикального профілю, температури повітря проводять за допомогою системи радіоакустичного зондування. При цьому вертикально вгору випромінюють акустичний імпульс, який опромінюють електромагнітними коливаннями. Параметри акустичного імпульсу - частоту синусоїдального заповнення, тривалість і період повторення - формують за допомогою звукової карти-персонального комп'ютера. Значення цих параметрів вибирають у такий спосіб, щоб умова Брега виконувалась на першій точці траси зондування. Для цього термометром вимірюють приземну температуру повітря на рівні верхнього зрізу акустичної антени, далі c a T розраховують швидкість звуку за формулою a і довжину акустичної хвилі (див. вираз (2)), необхідної для виконання умови Брега на цьому рівні для заданої довжини хвилі електромагнітного коливання системи радіоакустичного зондування, а розраховану довжину акустичної хвилі використовують для розрахунку найвищої звукової частоти синусоїдального f c a / a . Розсіяні від акустичного імпульсу заповнення акустичного імпульсу за формулою a електромагнітні коливання приймають, підсилюють, послідовно перемножують у кореляторі з сигналами, сформованими відповідно до функції розсіювання, яка має вигляд Fr, q E2r 'r S * r 'e jqr 'dr 45 , r - просторове розстроювання (зміщення) сигналів; E,S - комплексні обвідні коливань де (Карташов В.М. Розвиток теорії та удосконалення систем радіоакустичного і акустичного зондування атмосфери. Автореферат дис. д-ра техн. наук. - Харків, 2003. - С. 13-14), для кожного рівня траси зондування, послідовно порівнюють амплітуду вихідних сигналів корелятора з кожного рівня траси зондування між собою, за результатами порівняння амплітуди вихідних сигналів корелятора з кожного рівня траси зондування визначають максимальний з 2 UA 93131 U 5 10 15 них, за яким визначають параметр розстроювання умови Брега для кожного рівня траси зондування, який використовують для розрахунку температури повітря для всіх точок вертикального профілю температури повітря. Визначення параметра розстроювання умови Брега та розрахунки температури для всіх точок вертикального профілю температури повітря виконуються за командами, які формує персональний комп'ютер. Він же задає вид функції розсіювання для генераторів опорної напруги для кожного рівня траси зондування та за необхідності кількість зондувань (тривалість години необхідного осереднення одиничних профілів температури, що традиційно для вимірювань у метеорології) та термін виведення вертикального профілю на екран монітора або до зовнішніх засобів відображення метеорологічної інформації. За наявності інверсійного стану приземного шару атмосфери (коли температура повітря підвищується зі зростанням висоти), що виявляється аналізом апріорної інформації, розраховану довжину акустичної хвилі використовують для розрахунку найнижчої звукової частоти синусоїдального заповнення акустичного імпульсу. Робоча формула для вимірювання відносних змін температури повітря на підставі вимірювання фаз акустичного ехосигналу: C2 1 C1 2 20 25 (1) , де C1 - швидкість акустичної хвилі для раніше виміряної фази ( 1 ), C2 - швидкість акустичної хвилі для наступного вимірювання фази ( 2 ). Під наступним вимірюванням розуміють вимірювання фази при тому самому часовому стробі t стр , пізніше, якщо нас цікавить зміна температури повітря з часом, але для однієї й тієї самої висоти. Якщо нас цікавлять зміни температури повітря з висотою (висотні профілі), то в даному випадку, оскільки стробування відбувається за висотою на однакові ділянки, визначені величиною строба t стрh , наступним вимірюванням фази акустичного ехосигналу тут є сусідня ділянка стробування висоти. Оскільки в цьому випадку вимірюють фази 1 і 2 в межах від 0° до 360°, а у формулі (1) йдеться про повні значення фаз, то за вимірюваною величиною різниці фаз 1 2 1 2 визначають дійсні значення фаз ( 1 і 2 ): 30 2 1 , t 2 стр 4 T (2) де T - період випроміненої звукової хвилі; t стр - ми задаємо самі; - тривалість випромінюваного імпульсу, обмірювана різниця фаз. 35 2 знайдемо зі співвідношення Потім, задавшись температурою повітря T1 2 1 1 2 , де 1 2 , за якої була виміряна фаза, знаходять C1 20 T1 . Підставивши у вираз (1) знайдені значення, визначають З 2 , а за С T 2 З 2 знаходять величину T2 як 2 400 . Потім знаходять значення значенням T1 2 T1 T2 . Після цього обчислюють систематичну помилку як: величину %общ 100 % 50% L / D t стр / (3) , 40 У виразі (3) величини t стр й задані. Величину D знаходять за формулою як 3 UA 93131 U D t стр C1 2 . Величина 5 10 15 20 25 30 L C1 2 . Потім виправляють виміряні значення T1,2 на величину систематичної помилки. Для ехосигналів, спостережуваних водночас в радіо- та акустичному каналі, знаходять середнє значення вимірюваної температури повітря й визначають помилку вимірювань. Для ехосигналів, спостережуваних тільки в одному з каналів, визначають помилку вимірювання й вірогідність отриманого результату. Причому, оскільки ми в каналі РАЗ вимірюємо справжні (не відносні) значення температури повітря, то для вимірюваної фази акустичного ехосигналу в той самий час і для тієї самої висоти, що в каналі РАЗ (для того самого обсягу повітря), ми можемо приписати це обмірюване за допомогою системи РАЗ значення температури повітря й тоді всі вимірювані в каналі AЗ різниці фаз для акустичних ехосигналів можемо обрахувати щодо цієї величини у дійсні значення температури. Таким чином, і в каналі AЗ, і в каналі РАЗ ми вимірюватимемо значення температури повітря в абсолютних дійсних (не у відносних) значеннях. Отже, коли в способі дистанційного вимірювання температури повітря за допомогою системи РАЗ ведуть прийом водночас радіосхосигналу від випроміненого акустичного пакета хвиль і прийом акустичного ехосигналу від того самого акустичного пакета хвиль, розсіяних температурними неоднорідностями, ми можемо вимірювати температуру повітря й тоді, коли неможливо спостерігати акустичний ехосигнал, і навпаки за неможливості спостереження радіоехосигналу ми можемо за допомогою AЗ вимірювати температуру повітря. Крім того, оскільки в цьому випадку ми вимірюємо водночас за допомогою РАЗ дійсні значення температури повітря, а за допомогою A3 вимірюємо відносні значення температури, існує можливість перерахувати вимірювані відносні значення температури за допомогою AЗ в абсолютні дійсні значення, вимірювані за допомогою РАЗ. Для урахування виявленого нового явища в атмосфері Землі - анізотропії молекулярних процесів у нейтральній атмосфері, вимірювання температури повітря проводять або для заданого задачею вимірювання напрямку, або вимірювання проводять по черзі в трьох або більше різних напрямках, наприклад: у вертикальному напрямку й під кутом до вертикалі у двох протилежних за азимутом напрямках. У цьому випадку через те, що хаотична швидкість молекул повітря може бути через анізотропію різною для кожного напрямку, а температура m 2 2 T пов'язана з хаотичною швидкістю молекул відомим співвідношенням T може бути різною для різних (де m - маса молекули), то вимірювана температура повітря повітря T ~ 35 40 напрямків. На фіг. 1 схематично подано розташування на місцевості антен системи для спільного радіоакустичного зондування й акустичного зондування. На схемі А1 - передавальна антена радіоканалу, А2 - приймальна антена радіоканалу, А3 - приймально-передавальна антена акустичного каналу. На фіг. 2 подана функціональна схема пристрою для реалізації запропонованого способу: 4 - ЕОМ, 5 - акустичний передавач, 6 - комутатор антен, 7 - акустичний приймач, 8 - канал обробки даних AЗ, 9 - синхронізатор, 10 - радіопередавач, 11 - радіоприймач, 12 - канал обробки РАЗ. Розглянемо роботу пропонованого способу й функціональну схему пристрою для його реалізації, звернувшись до фіг. 1 і фіг. 2. Отже, за командою з ЕОМ 4 через антену А3 випромінюється пакет акустичних хвиль заданої тривалості , водночас підключається радіоканал. Потім акустична антена (А ) 3 45 комутатором антен (6) перемикається на прийом до входу приймача (7). Через певний час, заданий тривалістю строба t стр , ми приймаємо акустичний ехосигнал приймачем 5, розсіяний температурними неоднорідностями на висоті стробування 50 им . Мінімальна висота, з якої ми hmin им с 2 можемо приймати акустичний ехосигнал, дорівнюватиме , де им - тривалість з - швидкість звуку. випроміненого пакета акустичних хвиль, Водночас приймачем (10) приймається радіоехосигнал від пакета акустичних хвиль, розташованого на висоті стробування. Потім прийнятий радіоехосигнал надходить у канал обробки даних (12), де вимірюється доплерівська частота прийнятого ехосигналу. З виходу каналу обробки дані надходять на ЕОМ 4 UA 93131 U 5 10 15 20 25 30 35 40 45 50 55 (4), де за спеціально розробленим алгоритмом обчислюється температура повітря для заданої стробом висоти. Прийнятий приймачем (7) акустичний ехосигнал надходить у канал обробки даних акустичних ехосигналів (8), де вимірюється фаза прийнятого ехосигналу. З виходу каналу обробки дані надходять на ЕОМ (4), де за спеціально розробленим алгоритмом визначається температура повітря. Причому обмірюваній фазі акустичного ехосигналу на цій висоті стробування присвоюється температура повітря, що обмірювана радіоакустичним зондуванням для цього строба. Подальше вимірювання температури повітря, отримане в каналі акустичного зондування, вестиметься щодо цієї величини температури на підставі вимірюваних відносних змін фази акустичних ехосигналів. Отже, на виході каналу акустичного зондування в ЕОМ отримуватимемо дійсні значення вимірювань температури повітря, а не їхні відносні зміни. Подальша обробка даних в ЕОМ, отриманих у каналах радіоакустичного та акустичного зондування, зводиться до отримання усереднених значень температури повітря, отриманих в один і той самий час і для однієї й тієї самої висоти в обох каналах, якщо ехосигнал спостерігається водночас і для каналу радіоакустичного зондування, і для каналу акустичного зондування. У цьому випадку підвищується точність і вірогідність вимірюваної температури повітря, оскільки обчислюється середнє значення температури повітря, вимірюваної водночас за допомогою двох способів. У тому випадку, коли ехосигнал спостерігається тільки в одному з каналів (радіоакустичному або акустичному), розширюються можливості способу. Розширення можливостей способу пов'язане з тим, що несприятливі умови для радіоакустичного та акустичного зондування переважно протилежні. Так, наприклад, за повної відсутності вітру, як правило, відсутні атмосферні неоднорідності, які розсіюють акустичні хвилі, і ми не можемо спостерігати акустичний ехосигнал, а відтак - вести вимірювання температури повітря. Водночас відсутність вітру є найбільш сприятливою умовою для РАЗ, оскільки підвищується точність вимірювання температури повітря. Сильний вітер є несприятливою умовою для радіоакустичного зондування, оскільки вітер виносить акустичний пакет хвиль із діаграми спрямованості антени, внаслідок чого не спостерігається радіоакустичний ехосигнал і вимірювання температури повітря неможливе. Водночас при сильному вітрі, як правило, зростає інтенсивність температурних неоднорідностей, а отже збільшується величина акустичного ехосигналу й точність вимірювання температури за допомогою AЗ зростає. Таким чином, при одночасному використанні радіоакустичного й акустичного зондування для дистанційного вимірювання температури повітря в системі РАЗ розширюються можливості цього способу, а також підвищується точність і вірогідність отриманих результатів вимірювання температури повітря порівняно з відомими способами. Крім того, вірогідність вимірюваної температури повітря за допомогою запропонованого способу підвищується ще й за рахунок того, що в пропонованому способі передбачена можливість вимірювання температури повітря (хаотичної швидкості молекул) за різних кутів зондування, чим враховується явище анізотропії хаотичної швидкості молекул, нещодавно виявлене для нейтральної атмосфери Землі. Подальша обробка даних в ЕОМ, отриманих у каналах радіоакустичного та акустичного зондування, зводиться до урахування у вимірюваних значеннях температури повітря помилок різного походження. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб дистанційного вимірювання температури повітря, у якому випромінюють в атмосферу акустичний імпульс із синусоїдальним заповненням, опромінюють акустичний імпульс електромагнітними коливаннями з довжиною хвилі вдвічі більше довжини хвилі синусоїдального заповнення акустичного імпульсу, приймають електромагнітні коливання, відбиті від акустичних імпульсів, виділяють сигнали із частотою допплерівського зрушення у відбитих акустичними імпульсами електромагнітних коливань, визначають частоти допплерівського зрушення для кожної точки траси, за значенням яких розраховують значення температури для всіх точок траси, причому обвідну акустичного імпульсу формують у вигляді sin x / x (де x к1t , а к1 коефіцієнт, який означає тривалість імпульсу, t - поточний час), який відрізняється тим, що водночас з прийомом електромагнітних коливань від випроміненого акустичного імпульсу ведуть прийом акустичного ехосигналу від цього самого випроміненого акустичного імпульсу, розсіяного температурними неоднорідностями, вимірюють фазу акустичного ехосигналу 1 і 2 для двох наступних зондувань для того самого часового строба t стр для вимірювання змін 5 UA 93131 U температури повітря в часі для фіксованої дальності (висоти), а також для того самого зондування вимірюють фази 1 і 2 для двох стробувань за висотою так, що t стр1 t стр2 (де - тривалість зондувального імпульсу) для отримання висотних змін температури повітря T , причому кожну фазу ( 1 , 2 ) вимірюють в межах від 0°до 360°, а потім, задавшись для 0 5 0 раніше виміряної фази 1 температурою повітря T1 (якщо, є можливість, її вимірюють), визначають за різницею фаз 1 2 1 2 різницю температур T1 2 , при цьому 2h приймається, що у формулі для визначення фази ехосигналу величина h не T змінюється в ході вимірювання фаз 1 і 2 для того самого часового строба t стр , а потім в обчислену в такий спосіб різницю температур вводять поправку на систематичну помилку % , 10 пов'язану насправді з невеликими змінами величини h в ході вимірювання величин 1 і 2 , причому стробування відбувається не тільки за часом, коли для кожного випроміненого акустичного імпульсу акустичний ехосигнал приймається для того самого часового строба t стр й порівнюються фази ехосигналів 1 і 2 , отримані для того самого t стр , але стробування відбувається ще й за дальністю (висотою) на ділянки t стр c для кожного випроміненого 15 20 25 звукового імпульсу, при цьому порівнюють вимірювані фази ехосигналів, отримані для двох сусідніх висот, і за різницею фаз визначають різницю температур, внаслідок чого для кожного випроміненого акустичного імпульсу вимірюють висотний профіль відносної зміни температури повітря, причому оскільки водночас для кожного випроміненого акустичного імпульсу за допомогою радіоакустичного способу вимірюють висотний профіль температури повітря для всієї траси, то на підставі обмірюваної температури повітря для найменшої висоти за допомогою радіоакустичного способу, що збігається з найменшою висотою висотного профілю відносних змін температури повітря, отриманих за допомогою акустичного способу, перераховують отримані відносні зміни температури за допомогою акустичного зондування у дійсні значення, при цьому вимірювання температури повітря (хаотичної швидкості молекул) проводять в певному напрямку за кутом місця й азимутом, що визначається поставленою задачею вимірювань температури. 6 UA 93131 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Автори англійськоюDelov Ivan Ankindinovych, Slipchenko Mykola Ivanovych, Leonidov Oleksii Viktorovych
Автори російськоюДелов Иван Акиндинович, Слипченко Николай Иванович, Леонидов Алексей Викторович
МПК / Мітки
МПК: G01S 13/95
Мітки: спосіб, вимірювання, дистанційного, повітря, температури
Код посилання
<a href="https://ua.patents.su/9-93131-sposib-distancijjnogo-vimiryuvannya-temperaturi-povitrya.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного вимірювання температури повітря</a>
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46524
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/00, G01S 13/95
Мітки: атмосфери, зондування, допомогою, спосіб, повітря, акустичного, вимірювання, дистанційного, температури, відносних, змін
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань повітря, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери вертикально чи під кутом до обрію, причому прийом розсіяних...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування
Номер патенту: 76538
Опубліковано: 15.08.2006
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
Мітки: температури, дистанційного, змін, акустичного, вимірювання, повітря, допомогою, спосіб, відносних, зондування
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування, що включає випромінювання в атмосферу пакета гармонійних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, моностатичне зондування атмосфери в двох різних за кутом місця напрямках, у вертикальному і під деяким кутом місця, з однієї точки водночас або по...
Спосіб дистанційного вимірювання висотних профілів температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 77836
Опубліковано: 15.01.2007
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95, G01W 1/00
Мітки: профілів, дистанційного, спосіб, акустичного, повітря, вимірювання, висотних, температури, допомогою, зондування, атмосфери
Формула / Реферат:
Спосіб дистанційного вимірювання висотних профілів температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонійних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, здійснення моностатичного зондування атмосфери у вертикальному напрямку, причому прийом розсіяних атмосферними неоднорідностями...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери

Номер патенту: 61346
Опубліковано: 15.05.2006
Автори: Сліпченко Микола Іванович, Дєлов Іван Акіндінович
МПК: G01S 13/95
Мітки: змін, атмосфери, акустичного, температури, зондування, допомогою, повітря, дистанційного, спосіб, вимірювання, відносних
Формула / Реферат:
Корисна модель стосується технології змішування (гомогенізації) сипких матеріалів і може знайти застосування у фармацевтичній промисловості, зокрема при виготовленні твердих лікарських форм і препаратів, а також у харчовій, хімічній, металургійній і інших промисловостях.Відомий і найбільш близький спосіб змішування сипких матеріалів у обертових апаратах [1], який включає завантаження сипких компонентів у робочу камеру, що обертається...
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери
Номер патенту: 46520
Опубліковано: 15.05.2002
Автори: Дєлов Іван Акіндінович, Сліпченко Микола Іванович
МПК: G01S 13/95
Мітки: допомогою, спосіб, акустичного, змін, повітря, зондування, температури, вимірювання, атмосфери, відносних, дистанційного
Формула / Реферат:
Спосіб дистанційного вимірювання відносних змін температури повітря за допомогою акустичного зондування атмосфери, що включає випромінювання в атмосферу пакета гармонічних коливань звуку, його прийом, перетворення прийнятих звукових коливань в електричні, визначення швидкості звуку, визначення температури, який відрізняється тим, що здійснюють моностатичне зондування атмосфери в двох різних за азимутом напрямках з однієї точки одночасно (чи...
Попередній патент: Склад квасу
Наступний патент: Пристрій для формування тістових заготовок
Випадковий патент: Електродуговий випарник металів або сплавів для нанесення покриття у вакуумі