Ґрунтоущільнюючий механізм
Номер патенту: 93802
Опубліковано: 10.03.2011
Автори: Мусійко Володимир Данилович, Карпенко Олександр Миколайович
Формула / Реферат
1. Ґрунтоущільнюючий механізм, що включає основний корпус (6), на якому шарнірно змонтовані крилоподібні корпуси (15, 16) із закріпленими на них робочими лапами-ущільнювачами (20), які пристосовані для ущільнювання ґрунту, установні елементи (8, 9), які виконані на верхній частині основного корпуса (6), система елементів (25, 26, 30, 31, 32) для синхронізації повороту крилоподібних корпусів (15, 16) та механізм (12) для примусового повороту останніх, а також орієнтувальне обладнання (38), яке пристосоване для контролю положення ґрунтоущільнюючого механізму відносно трубопроводу (5), який відрізняється тим, що зазначені установні елементи (8, 9) пристосовані для навішування основного корпуса (6) до рукояті робочого обладнання одноківшевого екскаватора за допомогою швидкодіючого тримача (10), пристосованого для навішування ковша екскаватора, механізм для примусового повороту крилоподібних корпусів (15, 16) виконаний у вигляді гідроциліндрів (12), які шарнірно закріплені до верхньої частини основного корпуса (6) і відповідних крилоподібних корпусів (15, 16), а система елементів (25, 26, 30, 31, 32) для синхронізації повороту крилоподібних корпусів (15, 16) виконана у вигляді похило поставлених шатунів-синхронізаторів (25, 26), які нижніми кінцями шарнірно з'єднані із відповідними крилоподібними корпусами (15, 16), а верхніми кінцями (28, 29) - із спільною віссю (30), яка встановлена у основному корпусі (6) з можливістю прямолінійного руху.
2. Ґрунтоущільнюючий механізм за попереднім пунктом, який відрізняється тим, що спільна вісь (30) шатунів-синхронізаторів (25, 26) оснащена зносостійкими роликами (31), які розташовані у каналі, що утворений між зносостійкими напрямними планками (32), які закріплені на стінках (35) основного корпуса (6) з можливістю регулювання їх положення.
3. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що крилоподібні корпуси (15, 16) змонтовані на основному корпусі (6) за допомогою спільної осі (24).
4. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що основний корпус (6) включає верхню горизонтальну плиту, на верхній поверхні (7) якої закріплені зазначені установні елементи (8, 9), та вертикальні паралельні стінки (35) із перемичками, спереду і ззаду яких під низом верхньої горизонтальної плити закріплені дві опори-тримачі (11) із отворами для осей, на яких підвішені відповідні гідроциліндри (12) і які розташовані перпендикулярно площинам вертикальних стінок (35), у нижніх частинах яких виконані отвори, у яких змонтовано спільну вісь (24), на якій змонтовані крилоподібні корпуси (15, 16), а у верхніх частинах вертикальних стінок (35) виконані вікна, навпроти яких розташована спільна вісь (30) шатунів-синхронізаторів (25, 26).
5. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що елементи кріплення (17, 18, 19) лап-ущільнювачів (20) пристосовані для пересування лап-ущільнювачів (20) вздовж крилоподібних корпусів (15, 16) і фіксації лап відносно корпусів з інтервалом, що відповідає діапазону діаметрів трубопроводів (5).
6. Ґрунтоущільнюючий механізм за попереднім пунктом, який відрізняється тим, що елементи кріплення (17, 18, 19) лап-ущільнювачів (20) включають у себе виконані на нижніх крайових частинах крилоподібних корпусів (15, 16) бокові подовжні виступи (17), на які боковими пазами (19) підвішені верхні плити (18) лап-ущільнювачів (20), які пристосовані для їх фіксації болтами від пересування вздовж виступів (17).
7. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом 5, 6, який відрізняється тим, що він оснащений гвинтовими механізмами (23), які пристосовані для пересування лап-ущільнювачів (20) вздовж відповідних крилоподібних корпусів (15, 16).
8. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що він оснащений додатковим змінним комплектом лап-ущільнювачів (20), який виконаний відповідно до діапазону діаметрів опрацьовуваних трубопроводів.
9. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що корпус (39) орієнтувального обладнання (38) підвішений до кінців спільної осі (24), на якій крилоподібні корпуси (15, 16) змонтовані на основному корпусі (6), розміщений під основним корпусом (6) посередині між лапами-ущільнювачами та зафіксований відносно основного корпуса (6) упорними кронштейнами (40) з гвинтами.
10. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що орієнтувальне обладнання (38) оснащене щонайменше одним важелем (53, 54), один кінець якого споряджено щупом (42, 43, 44), пристосованим для обпирання на поверхню трубопроводу (5), а інший кінець кінематично зв'язаний із датчиками (49, 50), які пристосовані для формування першого та другого сигналів при досягненні механізмом відповідно робочої та забороненої зон біля трубопроводу (5).
11. Ґрунтоущільнюючий механізм за попереднім пунктом, який відрізняється тим, що важіль складається із зовнішньої частини (54) із зазначеним щупом (42, 43, 44) та внутрішньої частини (53), які з'єднані між собою шарнірним коліном (41), яке пристосоване для фіксації його регулювальним затискачем.
12. Ґрунтоущільнюючий механізм за п. 10, який відрізняється тим, що кінематичний зв'язок зазначеного важеля (53, 54) із зазначеними датчиками (49, 50) включає в себе тягу-сергу (45), зв'язану шарнірами із важелем (53, 54) та повідком (46), який жорстко встановлений на осі (47) із кулачками (51, 52), які пристосовані для взаємодії із зазначеними датчиками (49, 50).
13. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що орієнтувальне обладнання (38) оснащене верхнім важелем (53, 54) із циліндроподібним верхнім щупом (42) та двома боковими важелями (53, 54) із сфероподібними щупами (43, 44), причому важелі (53, 54) виходять із корпуса (39) орієнтувального обладнання (38) у трьох напрямках.
14. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що нижні кінці (21) лап-ущільнювачів (20) споряджені змінними зносостійкими підошвами (22).
15. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що рукави (2) гідросистеми прикриті зовнішніми захисними скобами (36).
16. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що верхня частина основного корпуса (6) оснащена швидкодіючими з'єднувачами з електромережею орієнтувального обладнанням (38) та гідроприводом.
Текст
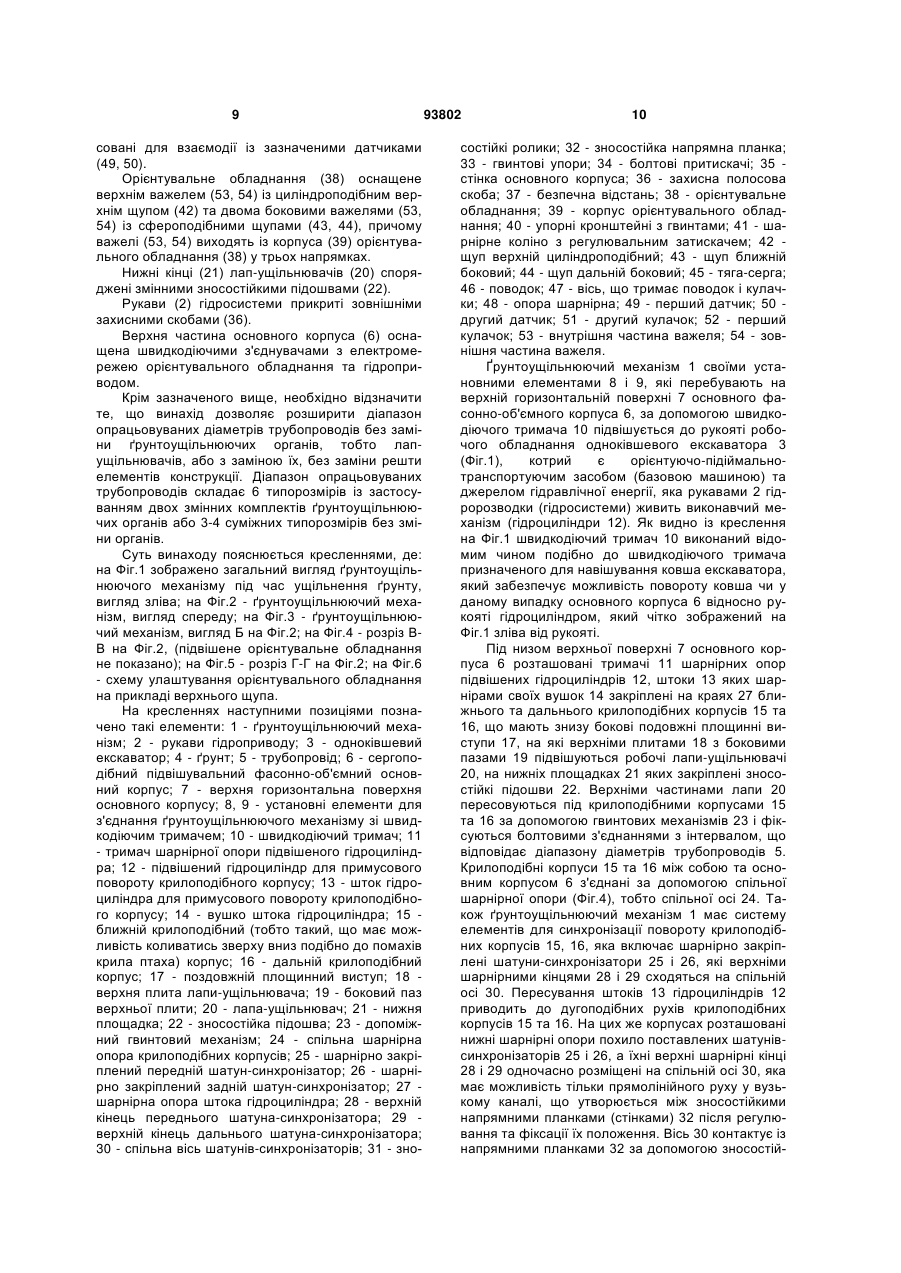
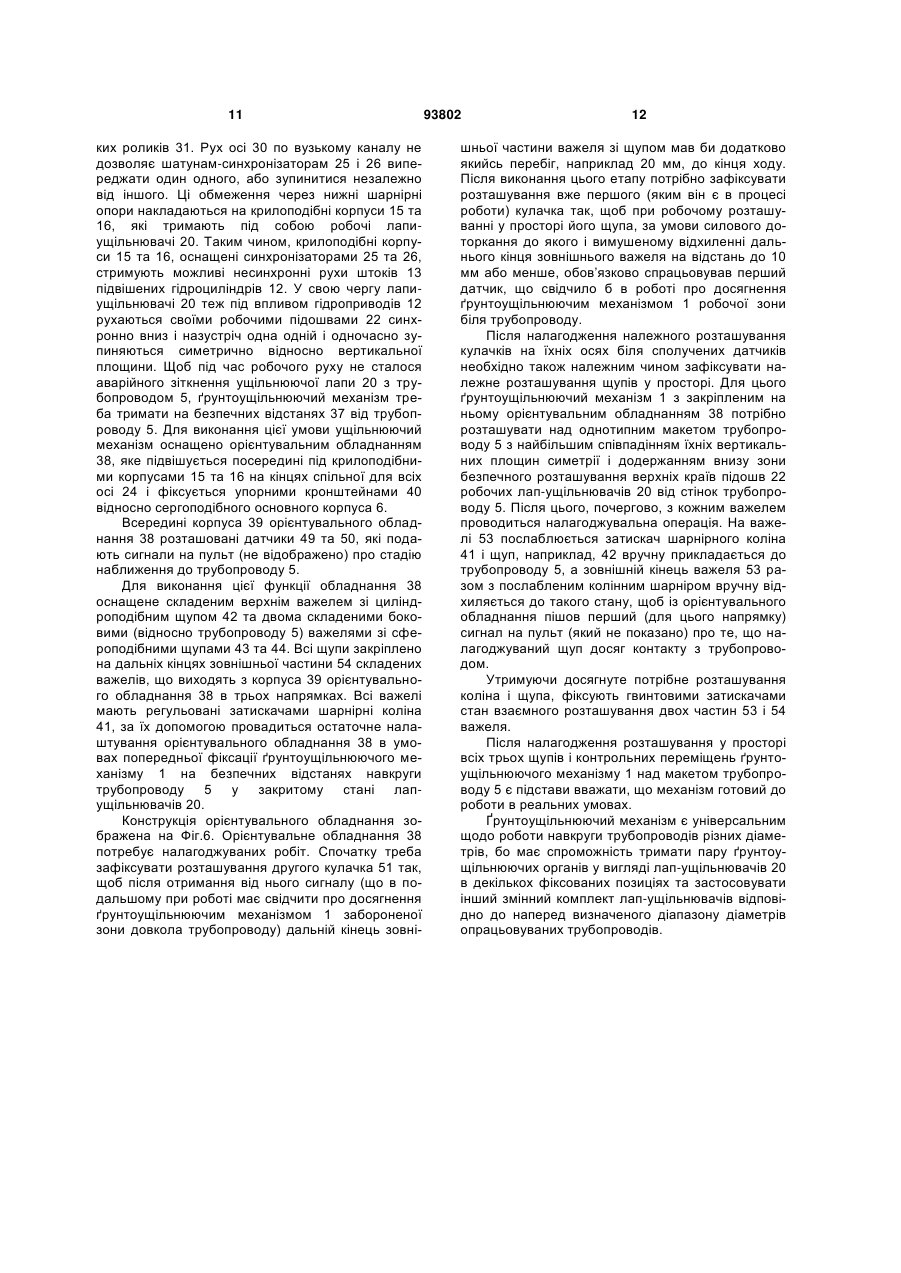
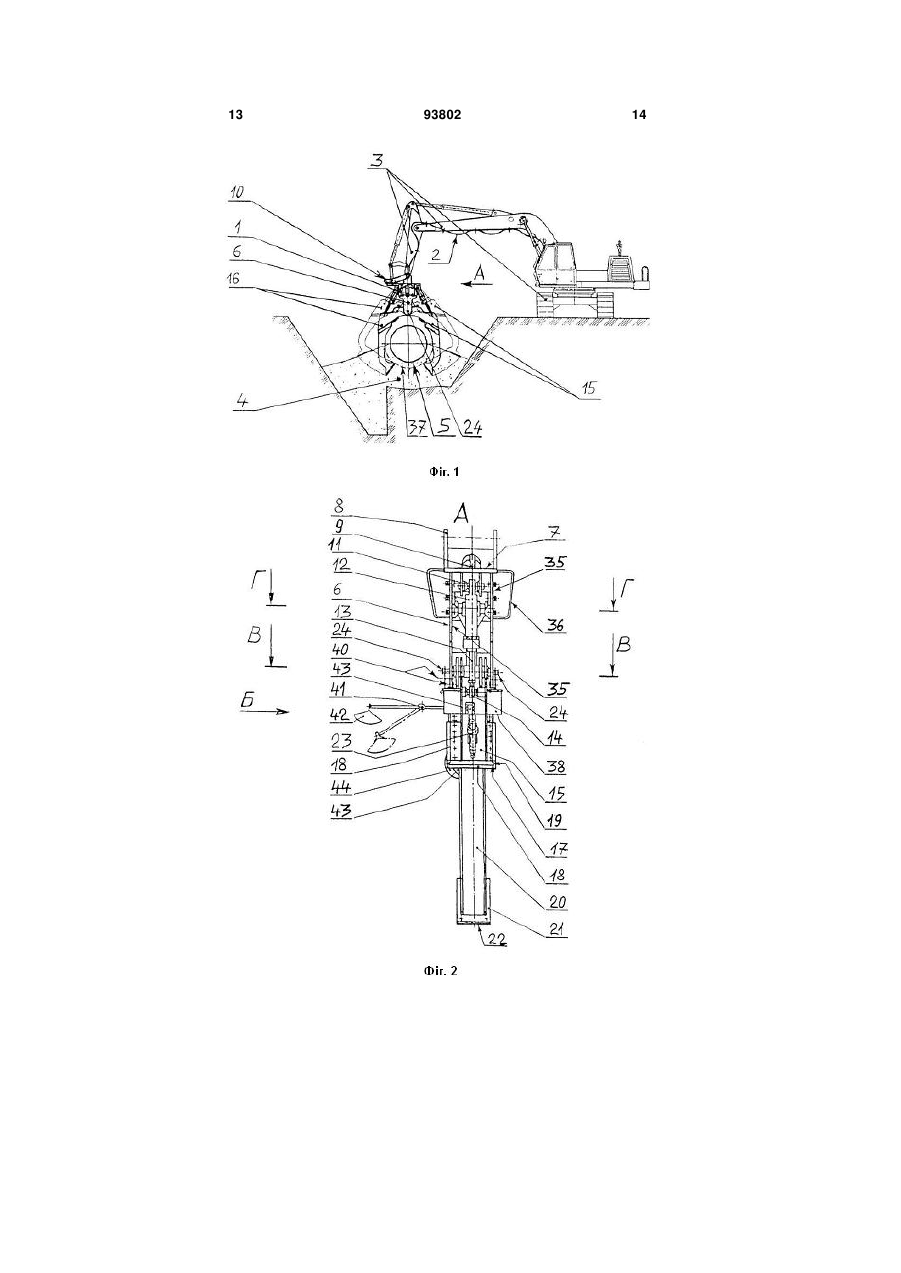
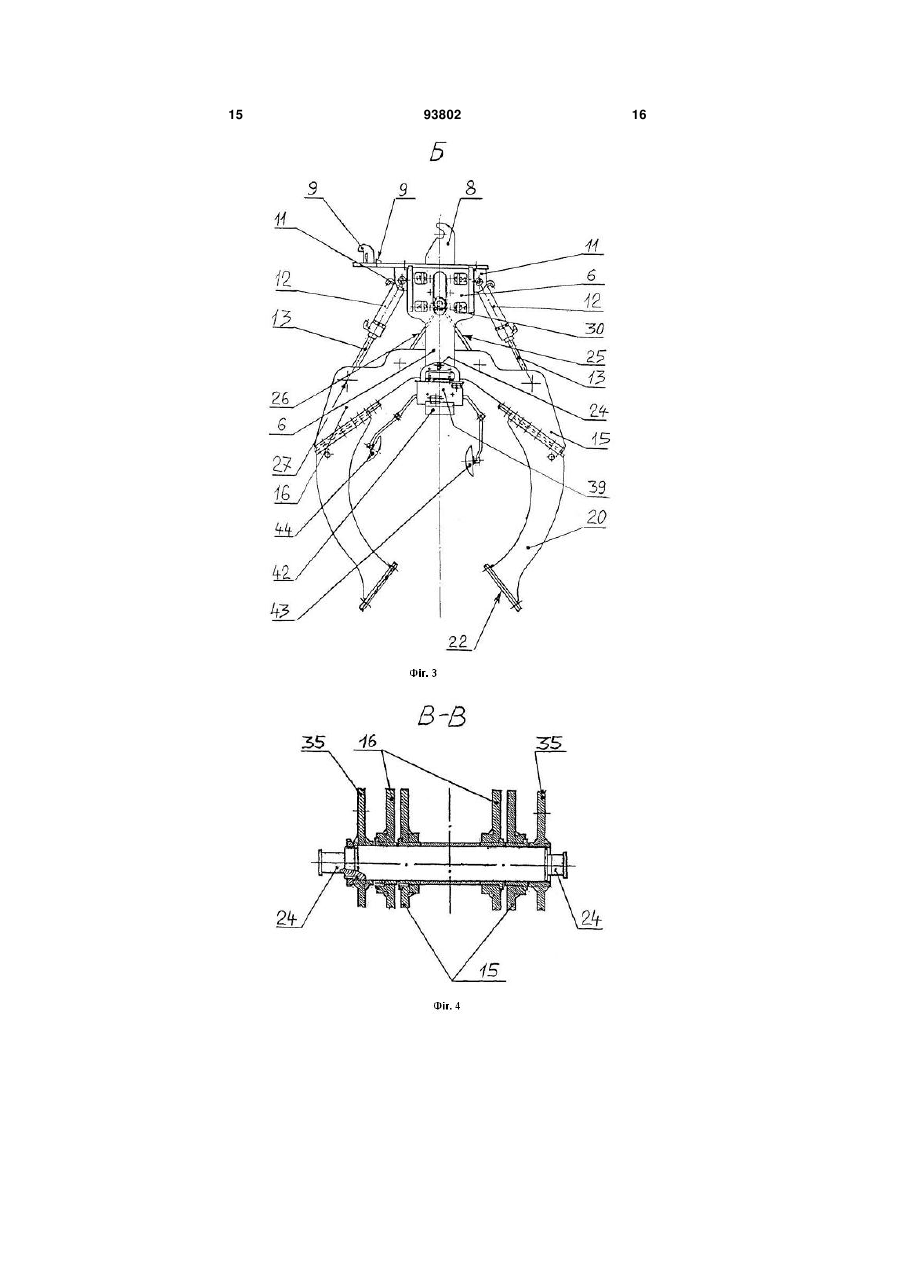
1. Ґрунтоущільнюючий механізм, що включає основний корпус (6), на якому шарнірно змонтовані крилоподібні корпуси (15, 16) із закріпленими на них робочими лапами-ущільнювачами (20), які пристосовані для ущільнювання ґрунту, установні елементи (8, 9), які виконані на верхній частині основного корпуса (6), система елементів (25, 26, 30, 31, 32) для синхронізації повороту крилоподібних корпусів (15, 16) та механізм (12) для примусового повороту останніх, а також орієнтувальне обладнання (38), яке пристосоване для контролю положення ґрунтоущільнюючого механізму відносно трубопроводу (5), який відрізняється тим, що зазначені установні елементи (8, 9) пристосовані для навішування основного корпуса (6) до рукояті робочого обладнання одноківшевого екскаватора за допомогою швидкодіючого тримача (10), пристосованого для навішування ковша екскаватора, механізм для примусового повороту крилоподібних корпусів (15, 16) виконаний у вигляді гідроциліндрів (12), які шарнірно закріплені до верхньої частини основного корпуса (6) і відповідних крилоподібних корпусів (15, 16), а система елементів (25, 26, 30, 31, 32) для синхронізації повороту крилоподібних корпусів (15, 16) виконана у вигляді похило поставлених шатунів-синхронізаторів (25, 26), які нижніми кінцями шарнірно з'єднані із відповідними крилоподібними корпусами (15, 16), а верхніми кінцями (28, 29) - із спільною віссю (30), яка 2 (19) 1 3 93802 4 які пристосовані для їх фіксації болтами від пересування вздовж виступів (17). 7. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом 5, 6, який відрізняється тим, що він оснащений гвинтовими механізмами (23), які пристосовані для пересування лапущільнювачів (20) вздовж відповідних крилоподібних корпусів (15, 16). 8. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що він оснащений додатковим змінним комплектом лапущільнювачів (20), який виконаний відповідно до діапазону діаметрів опрацьовуваних трубопроводів. 9. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що корпус (39) орієнтувального обладнання (38) підвішений до кінців спільної осі (24), на якій крилоподібні корпуси (15, 16) змонтовані на основному корпусі (6), розміщений під основним корпусом (6) посередині між лапами-ущільнювачами та зафіксований відносно основного корпуса (6) упорними кронштейнами (40) з гвинтами. 10. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що орієнтувальне обладнання (38) оснащене щонайменше одним важелем (53, 54), один кінець якого споряджено щупом (42, 43, 44), пристосованим для обпирання на поверхню трубопроводу (5), а інший кінець кінематично зв'язаний із датчиками (49, 50), які пристосовані для формування першого та другого сигналів при досягненні механізмом відповідно робочої та забороненої зон біля трубопроводу (5). 11. Ґрунтоущільнюючий механізм за попереднім пунктом, який відрізняється тим, що важіль скла дається із зовнішньої частини (54) із зазначеним щупом (42, 43, 44) та внутрішньої частини (53), які з'єднані між собою шарнірним коліном (41), яке пристосоване для фіксації його регулювальним затискачем. 12. Ґрунтоущільнюючий механізм за п. 10, який відрізняється тим, що кінематичний зв'язок зазначеного важеля (53, 54) із зазначеними датчиками (49, 50) включає в себе тягу-сергу (45), зв'язану шарнірами із важелем (53, 54) та повідком (46), який жорстко встановлений на осі (47) із кулачками (51, 52), які пристосовані для взаємодії із зазначеними датчиками (49, 50). 13. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що орієнтувальне обладнання (38) оснащене верхнім важелем (53, 54) із циліндроподібним верхнім щупом (42) та двома боковими важелями (53, 54) із сфероподібними щупами (43, 44), причому важелі (53, 54) виходять із корпуса (39) орієнтувального обладнання (38) у трьох напрямках. 14. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що нижні кінці (21) лап-ущільнювачів (20) споряджені змінними зносостійкими підошвами (22). 15. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що рукави (2) гідросистеми прикриті зовнішніми захисними скобами (36). 16. Ґрунтоущільнюючий механізм за будь-яким попереднім пунктом, який відрізняється тим, що верхня частина основного корпуса (6) оснащена швидкодіючими з'єднувачами з електромережею орієнтувального обладнанням (38) та гідроприводом. Винахід стосується технології і технічних засобів у області виконання земляних робіт при заміні ізоляційного покриття трубопроводів, яка виконується на проектних відмітках трубопроводу у траншеї, переважно, без зупинки експлуатації трубопроводу, власне до ґрунтоущільнюючих механізмів. Із SU 1036828 A, 23.08.1983 відомий ґрунтоущільнюючий механізм, що має основну раму (основний корпус), яка навішена на базову машину (трубоукладач). На основній рамі змонтований механізм вібрації, зв'язаний із шатунами, які шарнірами з'єднані із верхніми кінцями важелівущільнювачів (лап-ущільнювачів). На основній рамі змонтовані два коромисла (важелі першого роду), перші кінці яких з'єднані із важелямиущільнювачами, а інші кінці - між собою привідним гідроциліндром. Протилежні плечі (кінці) коромисел з'єднані між собою реактивною тягою (елементом синхронізації), яка синхронізує кутові коливання важелів-ущільнювачів. Ці коливання здійснюються поблизу вертикалі і відповідно до цього ґрунтоущільнюючі пластини (підошви) лап здійснюють лінійні коливання поблизу до горизонталі. Таким чином, відомий механізм не спроможний здійснювати ущільнення ґрунту у вертикаль ному напрямку і, відповідно, не придатний для ущільнення ґрунту під трубопроводом при його ремонті з підкопом. Оскільки коромисла, гідроциліндр і реактивна тяга розташовані під основною рамою між важелями-ущільнювачами, то ускладнюється розміщення орієнтувального обладнання для контролю положення ґрунтоущільнюючого механізму відносно трубопроводу. Використання трубоукладача, як базової машини, ускладнює орієнтування механізму відносно трубопроводу. Із SU 1520185 A1, 07.11.1989 відомий ґрунтоущільнюючий механізм, що має стійкиущільнювачі, які змонтовані на протилежних кінцях змонтованої на рамі траверси (важеля першого роду) із можливістю пересування стійок вздовж траверси та фіксації їх відносно траверси з інтервалом, що відповідає діапазону діаметрів трубопроводів. Оскільки траверса навішена на джерело вертикальних коливань (гідромолот), то цей механізм, як і попередній, не спроможний здійснювати ущільнення ґрунту у вертикальному напрямку і, відповідно, не придатний для ущільнення ґрунту під трубопроводом при його ремонті з підкопом. Із UA 44294 С2, 15.02.2002 відомий ґрунтоущільнюючий механізм, що включає основну балку з 5 кронштейнами на її торцях (основний корпус), на кожному з яких за допомогою шарнірно-важільної системи, яка включає два важелі, змонтовані робочі шатуни-ущільнювачі (лапи-ущільнювачі), які пристосовані для ущільнювання ґрунту. Геометрія шарнірно-важільної системи виконана так, що робочі ґрунтоущільнюючі елементи (підошви) шатунів-ущільнювачів здійснюють рух по складній траєкторії зверху вниз та назустріч один одному. Верхні важелі шарнірно-важільних систем виконані Г-подібними, їх перші плечі з'єднані із шатунами та штоками привідних гідроциліндрів, а їх другі плечі з'єднані між собою синхронізаційною тягою (елементом синхронізації), яка синхронізує коливання цих важелів і відповідно шатунів-ущільнювачів. Для можливості опрацювання трубопроводів різного діаметра між торцями основної балки та кронштейнами можуть встановлюватись змінні вставки. Такий спосіб налаштування механізму на різні діаметри трубопроводів незручний з огляду на необхідність розбирання та наступного складання суттєвої частини механізму, яка має достатньо великі габарити та масу. Шарнірно-важільна система навішування шатунів-ущільнювачів складна та громіздка. За найближчий аналог можна прийняти ґрунтоущільнюючий механізм, який відомий із RU 2249080 C2, 27.03.2005. Цей механізм має основний корпус (скалка із вилкою та перехідником на її відповідно нижньому та верхньому кінцях), на якому за допомогою спільної осі шарнірно змонтовані два крилоподібні корпуси (тобто верхні частини робочих ґрунтоущільнюючих важелів) із закріпленими на них робочими лапами-ущільнювачами (тобто нижніми частинами робочих ґрунтоущільнюючих важелів із ущільнюючими плитами), які пристосовані для ущільнювання ґрунту під трубопроводом. Верхня частина основного корпуса (перехідник) має установні елементи, які пристосовані для приєднання основного корпусу (перехідника) до рукояті робочого обладнання одноківшевого екскаватора без можливості повороту основного корпуса відносно рукояті. Механізм для примусового повороту крилоподібних корпусів (ґрунтоущільнюючих важелів) включає у себе коромисло, яке двома шарнірно приєднуваними тягами з'єднано із крилоподібними корпусами і нерухомо з'єднано із стаканом, який встановлений на скалці основного корпуса із можливістю вертикальних зворотно-поступальних рухів. Верхня частина стакана шарнірно приєднуваною тягою зв'язанаіз хитною сергою екскаватора, яка може примусово хитатись гідроциліндром робочого обладнання одноківшевого екскаватора, який у звичайному використанні екскаватора слугує для повороту ковша відносно рукояті. Примусовий поворот крилоподібних корпусів (ґрунтоущільнюючих важелів) здійснюється внаслідок лінійних зворотнопоступальних рухів стакана із коромислом, які активуються зазначеним гідроциліндром повороту ковша робочого обладнання екскаватора. Оскільки поворот коромисла відносно скалки основного корпуса неможливий, то поворот крилоподібних корпусів синхронізований. Механізм також має орієнтувальне обладнання, яке пристосоване для 93802 6 контролю положення ґрунтоущільнюючого механізму відносно трубопроводу і виконане у вигляді підпружиненого упора-покажчика положення робочого органа по висоті та упора-покажчика по горизонталі. Використання гідроциліндра повороту ковша робочого обладнання екскаватора для примусового повороту крилоподібних корпусів та встановлення основного корпуса на рукояті без можливості його повороту робить неможливим використання зазначеного гідроциліндра для орієнтування механізму відносно гравітаційної вертикалі, що негативно впливає на якість та безпечність робочого процесу ущільнення ґрунту. Крім того, описаний вище механізм для примусового повороту крилоподібних корпусів є конструктивно складним, громіздким і ненадійним. Технічна задача винаходу полягає у тому, щоб шляхом забезпечення можливості швидкого закріплення ґрунтоущільнюючого механізму до рукояті екскаватора замість ковша, а також примусового повороту основного корпусу (6) відносно рукояті робочого обладнання одноківшевого екскаватора за допомогою гідроциліндра, який у звичайному використанні екскаватора використовується для повороту ковша, забезпечити можливість орієнтування ґрунтоущільнюючого механізму відносно гравітаційної вертикалі. Це позитивно впливає на якість та безпечність робочого процесу ущільнення ґрунту. Крім того, задача винаходу полягає також у тому, щоб механізм для примусового повороту крилоподібних корпусів виконати конструктивно простим, компактним, легким і надійним. Задача винаходу полягає також у тому, щоб завдяки оригінальному виконанню системи елементів для синхронізації повороту крилоподібних корпусів, забезпечити те, щоб ця система, поперше, не навантажувалась повним робочим зусиллям, яке розвивається гідроциліндрами при ущільненні ґрунту, а, по-друге, компактно вписувалась у простір між зазначеними гідроциліндрами, що забезпечить компактність механізму та захищеність елементів синхронізації від пошкодження, а також можливість розташування орієнтувального обладнання безпосередньо під основним корпусом по центру трубопроводу. Зазначена задача вирішена тим, що у ґрунтоущільнюючому механізмі, що включає основний корпус (6), на якому шарнірно змонтовані крилоподібні корпуси (15, 16) із закріпленими на них робочими лапами-ущільнювачами (20), які пристосовані для ущільнювання ґрунту, установні елементи (8, 9), які виконані на верхній частині основного корпуса (6), система елементів елементи (25, 26, 30, 31, 32) для синхронізації повороту крилоподібних корпусів (15, 16) та механізм (12) для примусового повороту останніх, а також орієнтувальне обладнання (38), яке пристосоване для контролю положення ґрунтоущільнюючого механізму відносно трубопроводу (5), згідно з винаходом, зазначені установні елементи (8, 9), пристосовані для навішування основного корпусу (6) до рукояті робочого обладнання одноківшевого екскаватора за допомогою швидкодіючого тримача (10), пристосованого для навішування ковша екскаватора, 7 механізм для примусового повороту крилоподібних корпусів (15, 16) виконаний у вигляді гідроциліндрів (12), які шарнірно закріплені до верхньої частини основного корпуса (6) і відповідних крилоподібних корпусів (15, 16), а система елементів (25, 26, 30, 31, 32) для синхронізації повороту крилоподібних корпусів (15, 16) виконана у вигляді похило поставлених шатунів-синхронізаторів (25, 26), які нижніми кінцями шарнірно з'єднані із відповідними крилоподібними корпусами (15, 16), а верхніми кінцями (28, 29) - із спільною віссю (30), яка встановлена у основному корпусі (6) з можливістю прямолінійного руху. Така конструкція дозволяє досягти можливості швидкого закріплення ґрунтоущільнюючого механізму до рукояті екскаватора замість ковша, а також здійснювати примусовий поворот основного корпусу (6) відносно рукояті робочого обладнання одноківшевого екскаватора за допомогою гідроциліндра, який у звичайному використанні екскаватора використовується для повороту ковша. Це забезпечує можливість орієнтування ґрунтоущільнюючого механізму відносно гравітаційної вертикалі, що позитивно впливає на якість та безпечність робочого процесу ущільнення ґрунту. Крім того, описаний вище механізм для примусового повороту крилоподібних корпусів у вигляді двох гідроциліндрів є конструктивно простим, компактним, легким і надійним, а також забезпечує оптимальну у даному випадку траєкторію руху ґрунтоущільнюючих органів, яка дає змогу робочим елементам ущільнювати ґрунт простим затисканням без зсувних складових робочого руху. Завдяки оригінальному виконанню системи елементів для синхронізації повороту крилоподібних корпусів ця система, по-перше, не навантажується повним робочим зусиллям, яке розвивається гідроциліндрами (12) при ущільненні ґрунту, а, по-друге, компактно вписується у простір між зазначеними гідроциліндрами, що забезпечує компактність механізму та захищеність елементів синхронізації від пошкодження, а також можливість розташування орієнтувального обладнання безпосередньо під основним корпусом по центру трубопроводу. Крім того, у окремих випадках виконання винаходу спільна вісь (30) шатунів-синхронізаторів (25, 26) оснащена зносостійкими роликами (31), які розташовані у каналі, що утворений між зносостійкими напрямними планками (32), які закріплені на стінках (35) основного корпусу (6) з можливістю регулювання їх положення. Крилоподібні корпуси (15, 16) змонтовані на основному корпусі (6) за допомогою спільної осі (24). Основний корпус (6) включає верхню горизонтальну плиту, на верхній поверхні (7) якої закріплені зазначені установні елементи (8, 9), та вертикальні паралельні стінки (35) із перемичками, спереду і ззаду яких під низом верхньої горизонтальної плити закріплені дві опори-тримачі (11) із отворами для осей, на яких підвішені відповідні гідроциліндри (12) і які розташовані перпендикулярно площинам вертикальних стінок (35), у нижніх частинах яких виконані отвори, у яких змонтовано спільну вісь (24), на якій змонтовані крилоподібні 93802 8 корпуси (15, 16), а у верхніх частинах вертикальних стінок (35) виконані вікна, навпроти яких розташована спільна вісь (30) шатунівсинхронізаторів (25, 26). Елементи кріплення (17, 18, 19) лапущільнювачів (20) пристосовані для пересування лап-ущільнювачів (20) вздовж крилоподібних корпусів (15, 16) і фіксації лап відносно корпусів з інтервалом, що відповідає діапазону діаметрів трубопроводів (5). Таке виконання механізму спрощує процес його налаштування для опрацювання трубопроводів різного діаметра. Елементи кріплення (17, 18, 19) лапущільнювачів (20) включають у себе виконані на нижніх крайових частинах крилоподібних корпусів (15, 16) бокові подовжні виступи (17), на які боковими пазами (19) підвішені верхні плити (18) лапущільнювачів (20), які пристосовані для їх фіксації болтами від пересування вздовж виступів (17). Механізм оснащений гвинтовими механізмами (23), які пристосовані для пересування лапущільнювачів (20) вздовж відповідних крилоподібних корпусів (15, 16). Ґрунтоущільнюючий механізм оснащений додатковим змінним комплектом лап-ущільнювачів (20), який виконаний відповідно до діапазону діаметрів опрацьовуваних трубопроводів. Таке виконання механізму робить можливим опрацювання трубопроводів у широкому діапазоні діаметрів. Корпус (39) орієнтувального обладнання (38) підвішений до кінців спільної осі (24), на якій крилоподібні корпуси (15, 16) змонтовані на основному корпусі (6), розміщений під основним корпусом (6) посередині між лапами-ущільнювачами та зафіксований відносно основного корпуса (6) упорними кронштейнами (40) з гвинтами. Таке розташування орієнтувального обладнання найкраще з погляду захищеності його від пошкодження та максимального наближення до трубопроводу. Орієнтувальне обладнання (38) оснащене щонайменше одним важелем (53, 54), один кінець якого споряджено щупом (42, 43, 44), пристосованим для обпирання на поверхню трубопроводу (5), а інший кінець кінематично зв'язаний із датчиками (49, 50), які пристосовані для формування першого та другого сигналів при досягненні механізмом відповідно робочої та забороненої зон біля трубопроводу (5). Це виконання орієнтувального обладнання дозволяє використовувати генеровані ним електричні сигнали у зручних високофункціональних електрифікованих системах керування робочим процесом ущільнення ґрунту. Важіль складається із зовнішньої частини (54) із зазначеним щупом (42, 43, 44) та внутрішньої частини (53), які з'єднані між собою шарнірним коліном (41), яке пристосоване для фіксації його регулювальним затискачем. Це дозволяє налаштовувати орієнтувальне обладнання для опрацювання трубопроводів різного діаметра. Кінематичний зв'язок зазначеного важеля (53, 54) із зазначеними датчиками (49, 50) включає в себе тягу-сергу (45), зв'язану шарнірами із важелем (53, 54) та повідком (46), який жорстко встановлений на осі (47) із кулачками (51, 52), які присто 9 совані для взаємодії із зазначеними датчиками (49, 50). Орієнтувальне обладнання (38) оснащене верхнім важелем (53, 54) із циліндроподібним верхнім щупом (42) та двома боковими важелями (53, 54) із сфероподібними щупами (43, 44), причому важелі (53, 54) виходять із корпуса (39) орієнтувального обладнання (38) у трьох напрямках. Нижні кінці (21) лап-ущільнювачів (20) споряджені змінними зносостійкими підошвами (22). Рукави (2) гідросистеми прикриті зовнішніми захисними скобами (36). Верхня частина основного корпуса (6) оснащена швидкодіючими з'єднувачами з електромережею орієнтувального обладнання та гідроприводом. Крім зазначеного вище, необхідно відзначити те, що винахід дозволяє розширити діапазон опрацьовуваних діаметрів трубопроводів без заміни ґрунтоущільнюючих органів, тобто лапущільнювачів, або з заміною їх, без заміни решти елементів конструкції. Діапазон опрацьовуваних трубопроводів складає 6 типорозмірів із застосуванням двох змінних комплектів ґрунтоущільнюючих органів або 3-4 суміжних типорозмірів без зміни органів. Суть винаходу пояснюється кресленнями, де: на Фіг.1 зображено загальний вигляд ґрунтоущільнюючого механізму під час ущільнення ґрунту, вигляд зліва; на Фіг.2 - ґрунтоущільнюючий механізм, вигляд спереду; на Фіг.3 - ґрунтоущільнюючий механізм, вигляд Б на Фіг.2; на Фіг.4 - розріз ВВ на Фіг.2, (підвішене орієнтувальне обладнання не показано); на Фіг.5 - розріз Г-Г на Фіг.2; на Фіг.6 - схему улаштування орієнтувального обладнання на прикладі верхнього щупа. На кресленнях наступними позиціями позначено такі елементи: 1 - ґрунтоущільнюючий механізм; 2 - рукави гідроприводу; 3 - одноківшевий екскаватор; 4 - ґрунт; 5 - трубопровід; 6 - сергоподібний підвішувальний фасонно-об'ємний основний корпус; 7 - верхня горизонтальна поверхня основного корпусу; 8, 9 - установні елементи для з'єднання ґрунтоущільнюючого механізму зі швидкодіючим тримачем; 10 - швидкодіючий тримач; 11 - тримач шарнірної опори підвішеного гідроциліндра; 12 - підвішений гідроциліндр для примусового повороту крилоподібного корпусу; 13 - шток гідроциліндра для примусового повороту крилоподібного корпусу; 14 - вушко штока гідроциліндра; 15 ближній крилоподібний (тобто такий, що має можливість коливатись зверху вниз подібно до помахів крила птаха) корпус; 16 - дальній крилоподібний корпус; 17 - поздовжній площинний виступ; 18 верхня плита лапи-ущільнювача; 19 - боковий паз верхньої плити; 20 - лапа-ущільнювач; 21 - нижня площадка; 22 - зносостійка підошва; 23 - допоміжний гвинтовий механізм; 24 - спільна шарнірна опора крилоподібних корпусів; 25 - шарнірно закріплений передній шатун-синхронізатор; 26 - шарнірно закріплений задній шатун-синхронізатор; 27 шарнірна опора штока гідроциліндра; 28 - верхній кінець переднього шатуна-синхронізатора; 29 верхній кінець дальнього шатуна-синхронізатора; 30 - спільна вісь шатунів-синхронізаторів; 31 - зно 93802 10 состійкі ролики; 32 - зносостійка напрямна планка; 33 - гвинтові упори; 34 - болтові притискачі; 35 стінка основного корпуса; 36 - захисна полосова скоба; 37 - безпечна відстань; 38 - орієнтувальне обладнання; 39 - корпус орієнтувального обладнання; 40 - упорні кронштейні з гвинтами; 41 - шарнірне коліно з регулювальним затискачем; 42 щуп верхній циліндроподібний; 43 - щуп ближній боковий; 44 - щуп дальній боковий; 45 - тяга-серга; 46 - поводок; 47 - вісь, що тримає поводок і кулачки; 48 - опора шарнірна; 49 - перший датчик; 50 другий датчик; 51 - другий кулачок; 52 - перший кулачок; 53 - внутрішня частина важеля; 54 - зовнішня частина важеля. Ґрунтоущільнюючий механізм 1 своїми установними елементами 8 і 9, які перебувають на верхній горизонтальній поверхні 7 основного фасонно-об'ємного корпуса 6, за допомогою швидкодіючого тримача 10 підвішується до рукояті робочого обладнання одноківшевого екскаватора 3 (Фіг.1), котрий є орієнтуючо-підіймальнотранспортуючим засобом (базовою машиною) та джерелом гідравлічної енергії, яка рукавами 2 гідророзводки (гідросистеми) живить виконавчий механізм (гідроциліндри 12). Як видно із креслення на Фіг.1 швидкодіючий тримач 10 виконаний відомим чином подібно до швидкодіючого тримача призначеного для навішування ковша екскаватора, який забезпечує можливість повороту ковша чи у даному випадку основного корпуса 6 відносно рукояті гідроциліндром, який чітко зображений на Фіг.1 зліва від рукояті. Під низом верхньої поверхні 7 основного корпуса 6 розташовані тримачі 11 шарнірних опор підвішених гідроциліндрів 12, штоки 13 яких шарнірами своїх вушок 14 закріплені на краях 27 ближнього та дальнього крилоподібних корпусів 15 та 16, що мають знизу бокові подовжні площинні виступи 17, на які верхніми плитами 18 з боковими пазами 19 підвішуються робочі лапи-ущільнювачі 20, на нижніх площадках 21 яких закріплені зносостійкі підошви 22. Верхніми частинами лапи 20 пересовуються під крилоподібними корпусами 15 та 16 за допомогою гвинтових механізмів 23 і фіксуються болтовими з'єднаннями з інтервалом, що відповідає діапазону діаметрів трубопроводів 5. Крилоподібні корпуси 15 та 16 між собою та основним корпусом 6 з'єднані за допомогою спільної шарнірної опори (Фіг.4), тобто спільної осі 24. Також ґрунтоущільнюючий механізм 1 має систему елементів для синхронізації повороту крилоподібних корпусів 15, 16, яка включає шарнірно закріплені шатуни-синхронізатори 25 і 26, які верхніми шарнірними кінцями 28 і 29 сходяться на спільній осі 30. Пересування штоків 13 гідроциліндрів 12 приводить до дугоподібних рухів крилоподібних корпусів 15 та 16. На цих же корпусах розташовані нижні шарнірні опори похило поставлених шатунівсинхронізаторів 25 і 26, а їхні верхні шарнірні кінці 28 і 29 одночасно розміщені на спільній осі 30, яка має можливість тільки прямолінійного руху у вузькому каналі, що утворюється між зносостійкими напрямними планками (стінками) 32 після регулювання та фіксації їх положення. Вісь 30 контактує із напрямними планками 32 за допомогою зносостій 11 ких роликів 31. Рух осі 30 по вузькому каналу не дозволяє шатунам-синхронізаторам 25 і 26 випереджати один одного, або зупинитися незалежно від іншого. Ці обмеження через нижні шарнірні опори накладаються на крилоподібні корпуси 15 та 16, які тримають під собою робочі лапиущільнювачі 20. Таким чином, крилоподібні корпуси 15 та 16, оснащені синхронізаторами 25 та 26, стримують можливі несинхронні рухи штоків 13 підвішених гідроциліндрів 12. У свою чергу лапиущільнювачі 20 теж під впливом гідроприводів 12 рухаються своїми робочими підошвами 22 синхронно вниз і назустріч одна одній і одночасно зупиняються симетрично відносно вертикальної площини. Щоб під час робочого руху не сталося аварійного зіткнення ущільнюючої лапи 20 з трубопроводом 5, ґрунтоущільнюючий механізм треба тримати на безпечних відстанях 37 від трубопроводу 5. Для виконання цієї умови ущільнюючий механізм оснащено орієнтувальним обладнанням 38, яке підвішується посередині під крилоподібними корпусами 15 та 16 на кінцях спільної для всіх осі 24 і фіксується упорними кронштейнами 40 відносно сергоподібного основного корпуса 6. Всередині корпуса 39 орієнтувального обладнання 38 розташовані датчики 49 та 50, які подають сигнали на пульт (не відображено) про стадію наближення до трубопроводу 5. Для виконання цієї функції обладнання 38 оснащене складеним верхнім важелем зі циліндроподібним щупом 42 та двома складеними боковими (відносно трубопроводу 5) важелями зі сфероподібними щупами 43 та 44. Всі щупи закріплено на дальніх кінцях зовнішньої частини 54 складених важелів, що виходять з корпуса 39 орієнтувального обладнання 38 в трьох напрямках. Всі важелі мають регульовані затискачами шарнірні коліна 41, за їх допомогою провадиться остаточне налаштування орієнтувального обладнання 38 в умовах попередньої фіксації ґрунтоущільнюючого механізму 1 на безпечних відстанях навкруги трубопроводу 5 у закритому стані лапущільнювачів 20. Конструкція орієнтувального обладнання зображена на Фіг.6. Орієнтувальне обладнання 38 потребує налагоджуваних робіт. Спочатку треба зафіксувати розташування другого кулачка 51 так, щоб після отримання від нього сигналу (що в подальшому при роботі має свідчити про досягнення ґрунтоущільнюючим механізмом 1 забороненої зони довкола трубопроводу) дальній кінець зовні 93802 12 шньої частини важеля зі щупом мав би додатково якийсь перебіг, наприклад 20 мм, до кінця ходу. Після виконання цього етапу потрібно зафіксувати розташування вже першого (яким він є в процесі роботи) кулачка так, щоб при робочому розташуванні у просторі його щупа, за умови силового доторкання до якого і вимушеному відхиленні дальнього кінця зовнішнього важеля на відстань до 10 мм або менше, обов’язково спрацьовував перший датчик, що свідчило б в роботі про досягнення ґрунтоущільнюючим механізмом 1 робочої зони біля трубопроводу. Після налагодження належного розташування кулачків на їхніх осях біля сполучених датчиків необхідно також належним чином зафіксувати належне розташування щупів у просторі. Для цього ґрунтоущільнюючий механізм 1 з закріпленим на ньому орієнтувальним обладнанням 38 потрібно розташувати над однотипним макетом трубопроводу 5 з найбільшим співпадінням їхніх вертикальних площин симетрії і додержанням внизу зони безпечного розташування верхніх країв підошв 22 робочих лап-ущільнювачів 20 від стінок трубопроводу 5. Після цього, почергово, з кожним важелем проводиться налагоджувальна операція. На важелі 53 послаблюється затискач шарнірного коліна 41 і щуп, наприклад, 42 вручну прикладається до трубопроводу 5, а зовнішній кінець важеля 53 разом з послабленим колінним шарніром вручну відхиляється до такого стану, щоб із орієнтувального обладнання пішов перший (для цього напрямку) сигнал на пульт (який не показано) про те, що налагоджуваний щуп досяг контакту з трубопроводом. Утримуючи досягнуте потрібне розташування коліна і щупа, фіксують гвинтовими затискачами стан взаємного розташування двох частин 53 і 54 важеля. Після налагодження розташування у просторі всіх трьох щупів і контрольних переміщень ґрунтоущільнюючого механізму 1 над макетом трубопроводу 5 є підстави вважати, що механізм готовий до роботи в реальних умовах. Ґрунтоущільнюючий механізм є універсальним щодо роботи навкруги трубопроводів різних діаметрів, бо має спроможність тримати пару ґрунтоущільнюючих органів у вигляді лап-ущільнювачів 20 в декількох фіксованих позиціях та застосовувати інший змінний комплект лап-ущільнювачів відповідно до наперед визначеного діапазону діаметрів опрацьовуваних трубопроводів. 13 93802 14 15 93802 16 17 Комп’ютерна верстка Л. Купенко 93802 Підписне 18 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюEarth-compacting mechanism
Автори англійськоюKarpenko Oleksandr Mykolaiovych, Musiiko Volodymyr Danylovych
Назва патенту російськоюГрунтоуплотняющий механизм
Автори російськоюКарпенко Александр Николаевич, Мусийко Владимир Данилович
МПК / Мітки
МПК: E02D 3/046, E01C 19/34, E02F 5/10
Мітки: ґрунтоущільнюючий, механізм
Код посилання
<a href="https://ua.patents.su/9-93802-gruntoushhilnyuyuchijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Ґрунтоущільнюючий механізм</a>
Ґрунтоущільнюючий механізм

Номер патенту: 49886
Опубліковано: 11.05.2010
Автори: Мусійко Володимир Данилович, Карпенко Олександр Миколайович
Мітки: механізм, ґрунтоущільнюючий
Формула / Реферат:
1. Ґрунтоущільнюючий механізм, що включає транспортний засіб, на який навішено ґрунтоущільнююче обладнання, що має пристрій для навішування з можливістю примусового переміщення і жорсткої фіксації відносно нього в площині, перпендикулярній напрямку переміщення, який має корпус, на якому змонтовано привідні ґрунтоущільнюючі органи з робочими елементами на їхніх нижніх кінцях та закріплено рукави, оснащені муфтами для підключення гідравлічного...
Виконавчий механізм для інгалятора та інгалятор, що містить виконавчий механізм
Номер патенту: 66820
Опубліковано: 15.06.2004
Автори: Ходсон Деррен, Расмуссен Ерген
МПК: A61M 11/00, A61M 15/00
Мітки: інгалятор, виконавчий, інгалятора, механізм, містить
Формула / Реферат:
1. Виконавчий механізм для інгалятора, призначеного для введення лікарського засобу шляхом інгаляції, що містить основне тіло (2), що включає в себе трубчастий елемент (8) для прийому респіраторного флакона (7), що містить лікарський засіб, і шток (11) клапана, що виходить з нього, випускний вузол (4) у вигляді частини, утвореної окремо від основного тіла (2), що містить мундштук для направлення лікарського засобу в рот користувача і блок...
Механізм повороту конвертера
Номер патенту: 22548
Опубліковано: 25.04.2007
Автори: Гатілова Валентина Іванівна, Мироненко Олександр Васильович, Брук Олександр Семенович
Мітки: повороту, механізм, конвертера
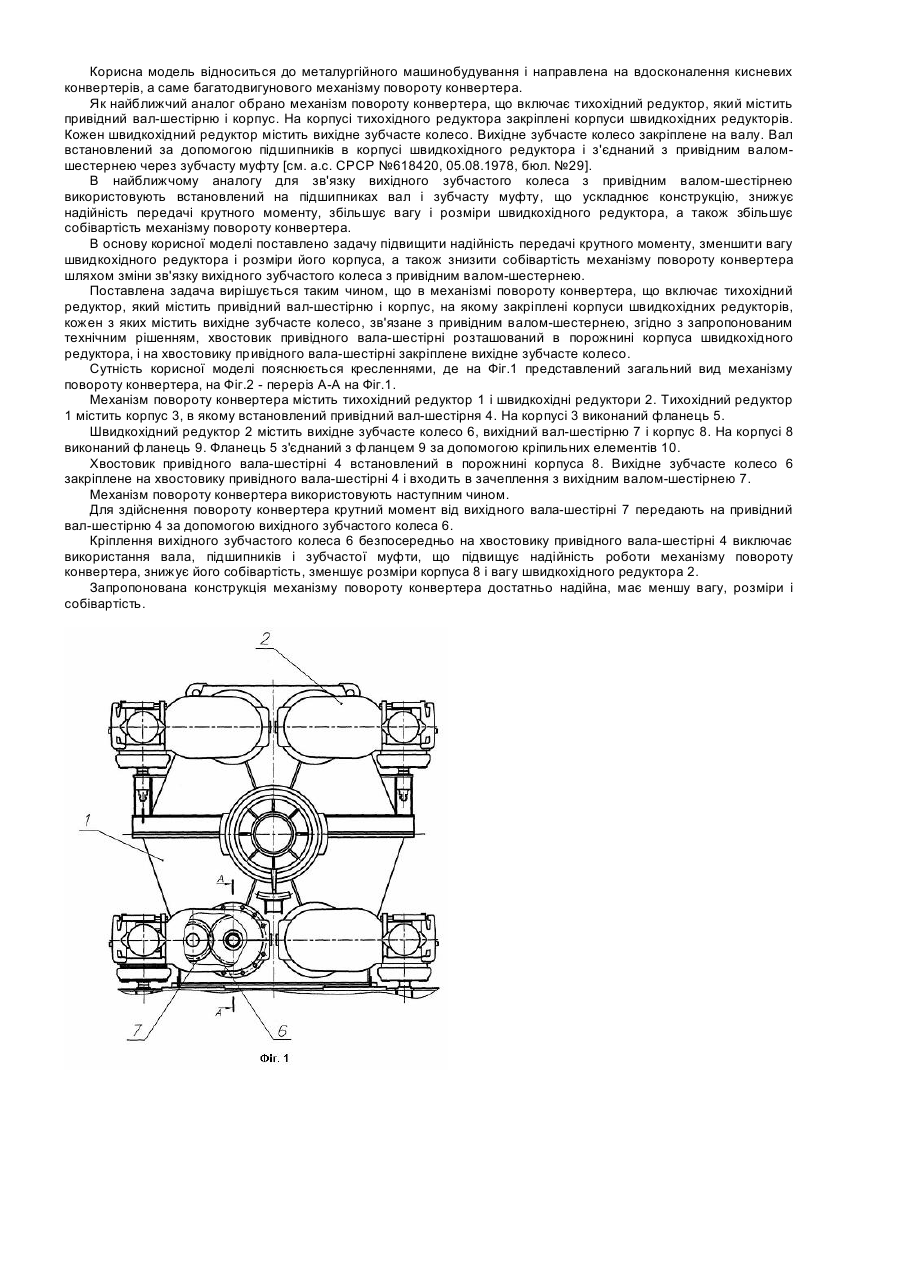
Формула / Реферат:
Механізм повороту конвертера, що включає тихохідний редуктор, який містить привідний вал-шестірню і корпус, на якому закріплені корпуси швидкохідних редукторів, кожен з яких містить вихідне зубчасте колесо, зв'язане з привідним валом-шестірнею, який відрізняється тим, що хвостовик привідного вала-шестірні розташований в порожнині корпусу швидкохідного редуктора, і на хвостовику привідного вала-шестірні закріплене вихідне зубчасте колесо.
Механізм повороту сидіння екскаватора-навантажувача
Номер патенту: 29243
Опубліковано: 10.01.2008
Автори: Луць Віктор Петрович, Лопачук Вадим Леонідович
МПК: E02F 9/16
Мітки: сидіння, механізм, екскаватора-навантажувача, повороту
Формула / Реферат:
1. Механізм повороту сидіння екскаватора-навантажувача, що містить опорну плиту, поворотну плиту, важіль фіксатора, вкладиші, прокладку і кришку з гвинтами, який відрізняється тим, що поворотна плита виконана з можливістю повороту на вкладишах, які розташовані по опорній плиті на спільній осі центральних фланців плит.2. Механізм за п. 1, який відрізняється тим, що поворотна плита розташована на центральному фланці опорної плити і...
Спусковий механізм арбалета
Номер патенту: 37293
Опубліковано: 15.05.2001
Автор: Крахмальова Тетяна Ігорівна
МПК: F41B 5/00
Мітки: спусковий, арбалета, механізм
Формула / Реферат:
Спусковий механізм арбалета, який містить підпружинений спусковий гачок, зв'язаний з корпусом арбалета з можливістю повороту, і вертикальний зуб, установлений в корпусі арбалета з можливістю повороту, який відрізняється тим, що до спускового механізму введено пару ланок "приливок - серга", які зв'язані шарнірно, а вертикальний зуб шарнірно зв'язаний з сергою з можливістю повороту внаслідок втрати стійкості пари ланок.(56)...
Попередній патент: Спосіб та установка для одержання ректифікованого спирту з фракцій спиртового виробництва
Наступний патент: Спосіб отримання алмазного композиційного матеріалу
Випадковий патент: Дистанційна розпірка для приблизно паралельних один до одного стрижнів, які сидять у комірках решітки (варіанти) та решітка з вічками