Пристрій для вирівнювання місткостей та етикетувальна машина з таким пристроєм

Формула / Реферат
1. Пристрій для вирівнювання місткостей (2) по відношенню принаймні до однієї їх геометричної ознаки (16) в задане положення або із заданою орієнтацією, який містить транспортер (5) з підставками (6) для розміщення відповідно однієї місткості і встановлені уздовж утвореного транспортером (5) транспортного тракту камери (8, 9, 10) системи розпізнавання зображень, яка за рахунок порівняння переданих камерами (8, 9, 10) фактичних відеоданих з тими, що зберігаються в електронному блоці (12) обробки і управління заданими відеоданими або параметрами, викликає вирівнювання місткостей (2), причому за допомогою системи стеження, яка створює перший ступінь системи розпізнавання зображень, відбувається попереднє вирівнювання місткостей (2), принаймні одна камера (8, 9) цієї першої системи стеження виконана з можливістю реєстрації місткості, що має типову геометричну ознаку (16) зовнішньої або периферійної поверхні на великій площі, принаймні одна наступна у напрямі транспортування додаткова система стеження для подальшого вирівнювання виконана з можливістю реєстрації принаймні однією своєю камерою (10, 11) кожної місткості (2), що направляється мимо, для подальшого вирівнювання на більш вузькій ділянці периферійної поверхні, яка має принаймні одну типову геометричну ознаку (16), при цьому електронний блок на основі додаткових збережених відеоданих або параметрів за існуючих відхилень від заданого положення викликає її подальше вирівнювання за допомогою сервоприводу відповідної підставки (б) для місткості, який відрізняється тим, що електронний блок (12) виконаний з можливістю порівняння відстані між принаймні двома опорними точками (17.1-17.7) типової ознаки (16) відповідної місткості (2) в переданих принаймні однією камерою (8, 9, 10, 11) відеоданих принаймні з параметрами, збереженим для даного типу місткостей, та використання результатів порівняння для керування сервоприводом відповідної підставки(6).
2. Пристрій за п. 1, який відрізняється тим, що у напрямі (А) транспортування транспортера (5) слідом за першою системою стеження, що створює перший ступінь системи розпізнавання зображень, розташовані принаймні одна друга система стеження, що створює другий ступінь системи розпізнавання зображень, і третя система стеження, що створює третій ступінь системи розпізнавання зображень відповідно принаймні з однією камерою (10, 11).
3. Пристрій за одним з пп. 1 або 2, який відрізняється тим, що за допомогою першої системи стеження або принаймні однієї камери (8, 9) цієї системи реєструють ділянку периферії відповідної місткості (2), що становить більше 180°.
4. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що перша система стеження містить принаймні дві камери (8, 9), встановлені своїми осями під кутом одна до одної.
5. Пристрій за п. 4, який відрізняється тим, що передані принаймні двома камерами (8, 9) першої системи стеження зображення або відеодані комбінують в електронному блоці (12) в одне загальне зображення.
6. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що принаймні одна система стеження містить принаймні дві камери (8, 9).
7. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що принаймні одна додаткова система стеження, зокрема друга і третя системи стеження, містять відповідно тільки одну камеру (10).
8. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що системи стеження або їх камери виконані для створення окремих зображень місткостей (2), що направляються мимо.
9. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що камери (8, 9, 10, 11) систем стеження виконані і/або керуються з можливістю створення ними відповідно тільки одного зображення кожної місткості (2), що направляється мимо.
10. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що принаймні одна система стеження, переважно перша система стеження, виконана з освітленням (В1, В2) переднього плану.
11. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що принаймні одна система стеження, наприклад, принаймні одна додаткова система стеження або третя система стеження, виконана для створення зображень або відеоданих за допомогою просвічування.
12. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що принаймні одна система стеження виконана з фоновим освітленням.
13. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що освітлення переднього плану або фонове освітлення виконане з можливістю налаштування за кольором і/або інтенсивністю.
14. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що транспортер являє собою ротор(5), що приводиться в обертання навколо вертикальної осі машини.
15. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що кожна підставка (б) для місткості має власний сервопривід.
16. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що підставки (6) для місткостей є обертовими тарілками.
17. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що електронний блок (12) виконаний з можливістю порівняння відстані між принаймні двома опорними точками (17.1-17.7) типової ознаки (16) відповідної місткості (2) в переданих принаймні однією камерою (8, 9, 10, 11) відеоданих принаймні з одним зразком відстані, що зберігається для даного типу місткостей.
18. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що електронний блок (12) виконаний з можливістю порівняння відстані або зразка відстані між опорними точками (17.1-17.7) в переданих принаймні однією камерою (8, 9, 10, 11) відеоданих з тими відстанями або зразками відстаней, що зберігаються для даного типу місткостей, визначення відстані або зразка відстані, найкраще співпадаючої відповідно з відстанню або зразком відстані у відеоданих, і обчислення на основі цього необхідного коректування для вирівнювання місткості (2).
19. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що він є складовою частиною етикетувальної машини (1) з входом (3) для місткостей (2), що етикетуються, виходом (4) для етикетованих місткостей (2), і принаймні однією етикетувальною станцією (7), передбаченою на транспортному тракті, який утворений транспортером (5) між входом (3) і виходом (4) , при цьому перша система стеження, а також принаймні одна додаткова система стеження передбачені на транспортному тракті між входом (3) і принаймні однією етикетувальною станцією (7).
20. Пристрій за п. 19, який відрізняється тим, що транспортер являє собою ротор (5) з великою кількістю підставок (6) для місткостей, що приводиться в обертання навколо вертикальної осі машини.
21. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що кожна підставка для місткості встановлена з можливістю обертання за допомогою керованого електронним блоком сервоприводу для вирівнювання розташованої на цій підставці місткості (2).
22. Етикетувальна машина з пристроєм для вирівнювання місткостей (2) по відношенню принаймні до однієї їх геометричної ознаки (16) в задане положення або із заданою орієнтацією, яка відрізняється тим, вона виконана за будь-яким із попередніх пунктів.
Текст
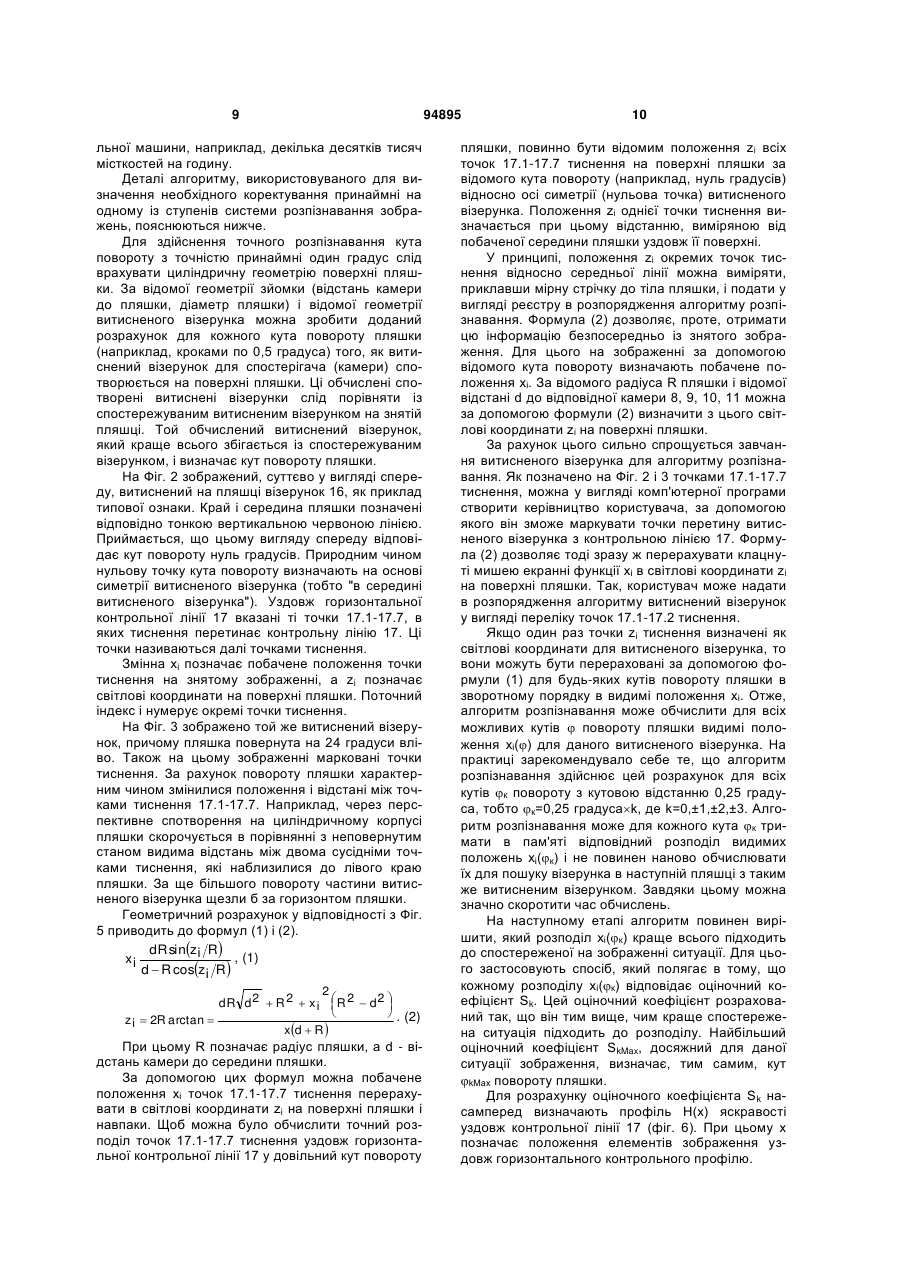
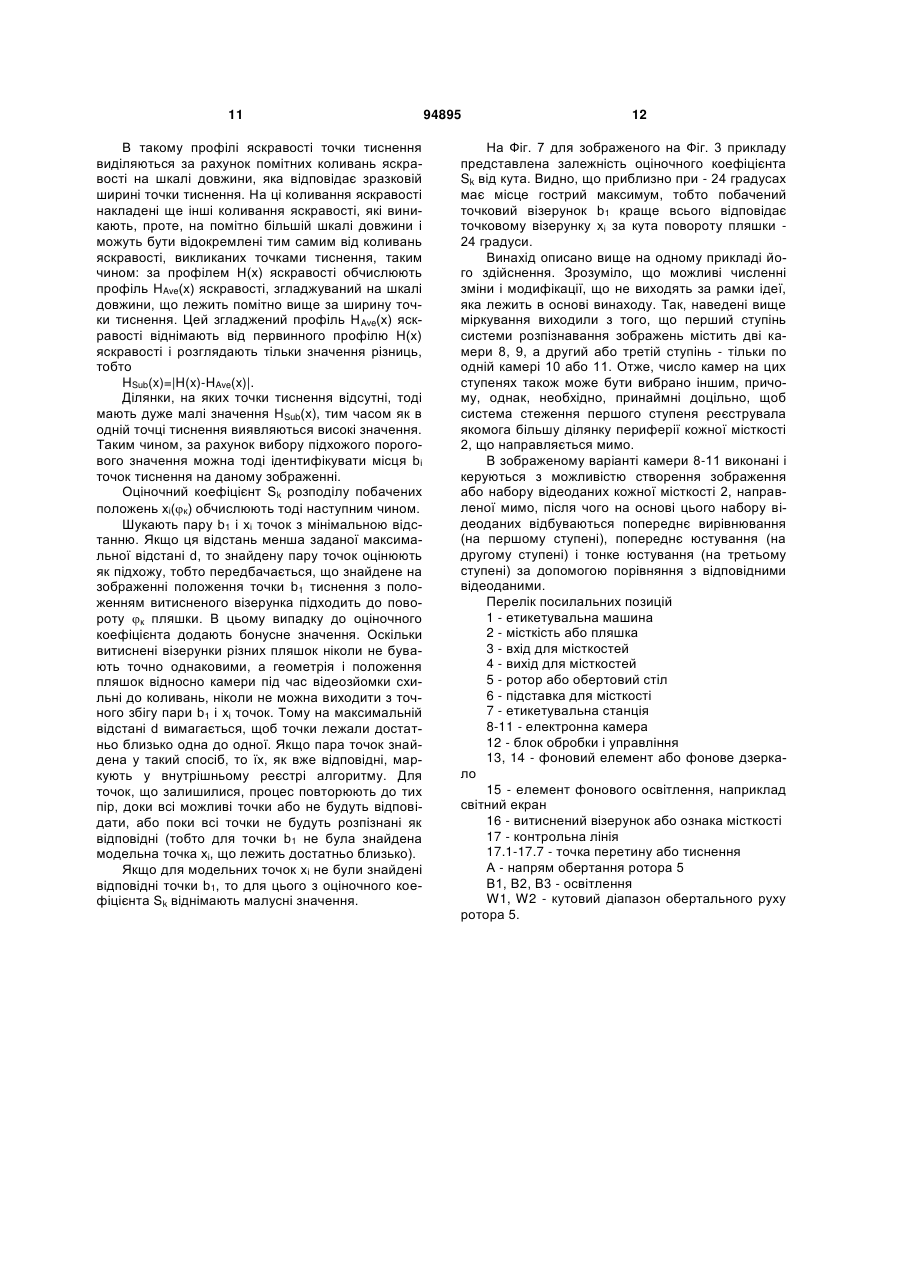
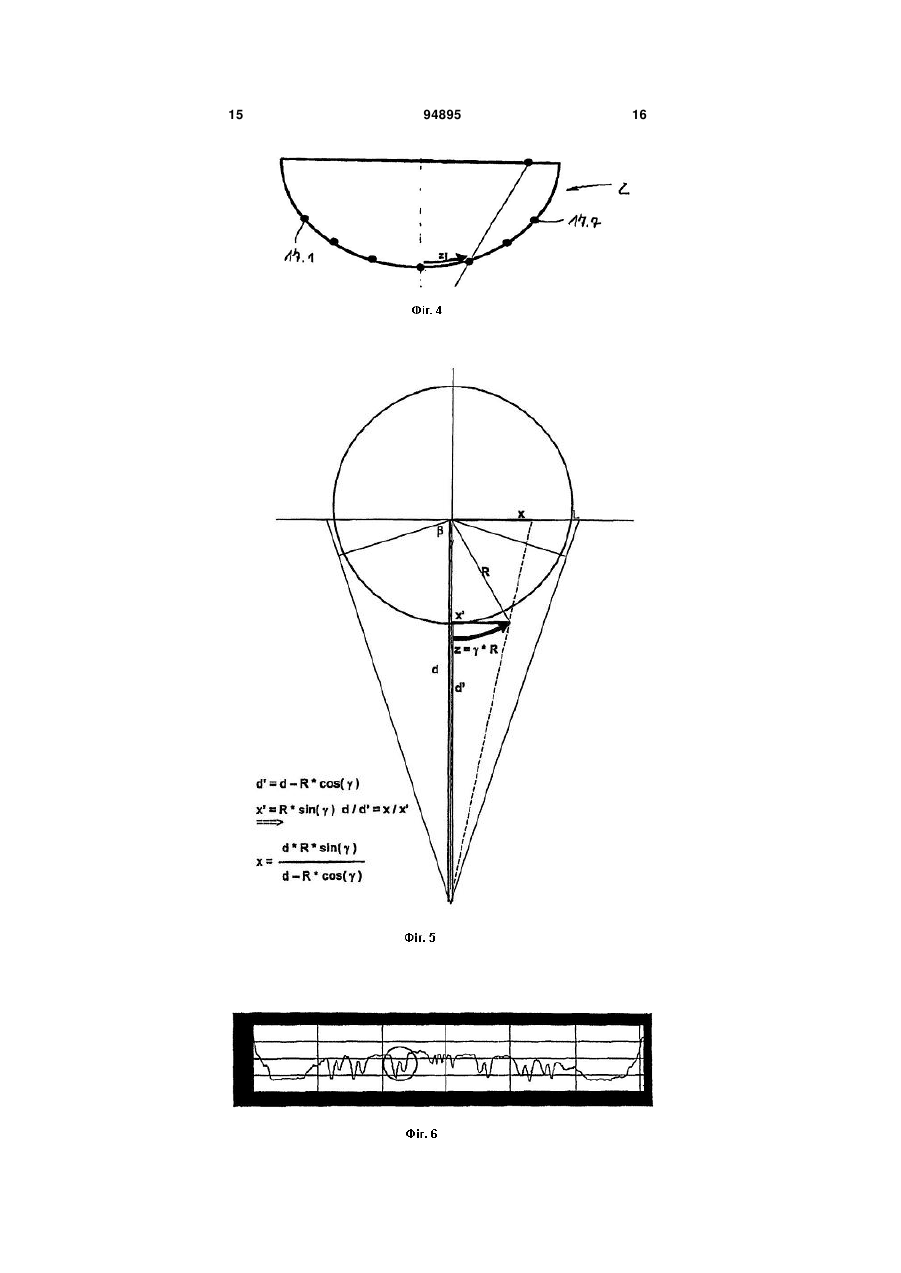
1. Пристрій для вирівнювання місткостей (2) по відношенню принаймні до однієї їх геометричної ознаки (16) в задане положення або із заданою орієнтацією, який містить транспортер (5) з підставками (6) для розміщення відповідно однієї місткості і встановлені уздовж утвореного транспортером (5) транспортного тракту камери (8, 9, 10) системи розпізнавання зображень, яка за рахунок порівняння переданих камерами (8, 9, 10) фактичних відеоданих з тими, що зберігаються в електронному блоці (12) обробки і управління заданими відеоданими або параметрами, викликає вирівнювання місткостей (2), причому за допомогою системи стеження, яка створює перший ступінь системи розпізнавання зображень, відбувається попереднє вирівнювання місткостей (2), принаймні одна камера (8, 9) цієї першої системи стеження виконана з можливістю реєстрації місткості, що має типову геометричну ознаку (16) зовнішньої або периферійної поверхні на великій площі, принаймні одна наступна у напрямі транспортування додаткова система стеження для подальшого вирівнювання виконана з можливістю реєстрації принаймні однією своєю камерою (10, 11) кожної місткості (2), що направляється мимо, для подальшого вирівнювання на більш вузькій ділянці периферійної поверхні, яка має принаймні одну типову геометричну ознаку (16), при цьому електронний блок на основі додаткових збережених відеоданих або параметрів за існуючих відхилень від заданого положення викликає її подальше вирівнювання за допомогою сервоприводу відповідної підставки (б) для місткості, який відрізняється тим, що електронний блок (12) виконаний з можливістю порівняння відстані між принай 2 (19) 1 3 94895 4 зображення кожної місткості (2), що направляється мимо. 10. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що принаймні одна система стеження, переважно перша система стеження, виконана з освітленням (В1, В2) переднього плану. 11. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що принаймні одна система стеження, наприклад, принаймні одна додаткова система стеження або третя система стеження, виконана для створення зображень або відеоданих за допомогою просвічування. 12. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що принаймні одна система стеження виконана з фоновим освітленням. 13. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що освітлення переднього плану або фонове освітлення виконане з можливістю налаштування за кольором і/або інтенсивністю. 14. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що транспортер являє собою ротор(5), що приводиться в обертання навколо вертикальної осі машини. 15. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що кожна підставка (б) для місткості має власний сервопривід. 16. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що підставки (6) для місткостей є обертовими тарілками. 17. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що електронний блок (12) виконаний з можливістю порівняння відстані між принаймні двома опорними точками (17.1-17.7) типової ознаки (16) відповідної місткості (2) в переданих принаймні однією камерою (8, 9, 10, 11) відеоданих принаймні з одним зразком відстані, що зберігається для даного типу місткостей. 18. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що електронний блок (12) виконаний з можливістю порівняння відстані або зразка відстані між опорними точками (17.1-17.7) в переданих принаймні однією камерою (8, 9, 10, 11) відеоданих з тими відстанями або зразками відстаней, що зберігаються для даного типу місткостей, визначення відстані або зразка відстані, найкраще співпадаючої відповідно з відстанню або зразком відстані у відеоданих, і обчислення на основі цього необхідного коректування для вирівнювання місткості (2). 19. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що він є складовою частиною етикетувальної машини (1) з входом (3) для місткостей (2), що етикетуються, виходом (4) для етикетованих місткостей (2), і принаймні однією етикетувальною станцією (7), передбаченою на транспортному тракті, який утворений транспортером (5) між входом (3) і виходом (4), при цьому перша система стеження, а також принаймні одна додаткова система стеження передбачені на транспортному тракті між входом (3) і принаймні однією етикетувальною станцією (7). 20. Пристрій за п. 19, який відрізняється тим, що транспортер являє собою ротор (5) з великою кількістю підставок (6) для місткостей,що приводиться в обертання навколо вертикальної осі машини. 21. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що кожна підставка для місткості встановлена з можливістю обертання за допомогою керованого електронним блоком сервоприводу для вирівнювання розташованої на цій підставці місткості (2). 22. Етикетувальна машина з пристроєм для вирівнювання місткостей (2) по відношенню принаймні до однієї їх геометричної ознаки (16) в задане положення або із заданою орієнтацією, яка відрізняється тим, що вона виконана за будь-яким із попередніх пунктів. Винахід стосується пристрою для точного за положенням вирівнювання місткостей згідно з обмежувальною частиною пункту 1 формули винаходу і етикетувальної машини з таким пристроєм згідно з обмежувальною частиною пункту 23 формули. На місткостях і, зокрема, пляшках, що мають на своїй зовнішній поверхні типові геометричні ознаки, наприклад орнамент, тиснення, опуклі написи і т.д., потрібно розміщувати етикетки з високою точністю по відношенню до цих ознак. Це значить, що у етикетувальної машини, до якої подають місткості, в дійсності "стоячи", проте з чисто випадковим вирівнюванням або орієнтацією, ці місткості необхідно спочатку вирівняти так, щоб вони мали по відношенню до своїх ознак якомога точніше задану орієнтацію. Лише тоді принаймні одна етикетка може бути розміщена на відповідній місткості, а потім притиснута до неї валиком і/або щіткою. Відомо, що для такого вирівнювання на роторі етикетувальної машини передбачають підставки для місткостей, наприклад у вигляді обертових тарілок, встановлені з можливістю керованого обертання за допомогою власних сервоприводів навколо вертикальної осі і тим самим навколо осі відповідної, розташованої на підставці, місткості. Відоме також управління підставками для місткостей для їх вирівнювання залежно від системи розпізнавання зображень або системи стеження, за допомогою якої відповідне положення або орієнтацію принаймні однієї, використовуваної для вирівнювання, типової геометричної ознаки місткості реєструють як фактичне значення, порівнюють його потім в електронному блоці з тими відеоданими або параметрами, що зберігаються там і представляють задане значення, і на цій основі 5 ініціюють таке управління сервоприводом, яке потрібне для необхідного коректування положення підставки для місткості (ЕР 1205388). У одному варіанті виконання цього відомого пристрою система стеження містить чотири камери, послідовно встановлені уподовж траєкторії руху підставок для місткостей у напрямі обертання ротора. Кожна камера реєструє при цьому частину периферії місткості, а саме, реєструючи відповідно 100° цієї периферії місткостей, що обертаються навколо своїх осей. На основі передаваних камерою фактичних відеоданих відбувається потім коректування положення обертання підставок для місткостей і вирівнювання місткостей по відношенню до їх типової геометричної ознаки. Задачею винаходу є створення пристрою, за допомогою якого було б можливим вирівнювання місткостей з вищою точністю по відношенню щонайменше до однієї типової геометричної ознаки, а саме, зокрема навіть за високої продуктивності, тобто за великої кількості оброблюваних в одиницю часу місткостей. Для вирішення цієї задачі пристрій виконаний відповідно до пункту 1 формули винаходу. Етикетувальна машина є об'єктом пункту 23. У пристрої, згідно з винаходом, за допомогою відеоданих першої системи стеження відбувається попереднє вирівнювання місткостей таким чином, що вони після попереднього вирівнювання мають принаймні до деякої міри точно необхідну орієнтацію, зокрема також по відношенню до їх геометричних ознак, що використовуються для вирівнювання, а саме принаймні з точністю, що досягається відомими пристроями. Ця перша система стеження реєструє контрольну ділянку, тобто ділянку периферії відповідної, місткості, на якій міститься принаймні одна геометрична ознака. На основі відеоданих принаймні однієї додаткової системи стеження відбувається потім точніше, можливо, також остаточне вирівнювання кожної місткості. Оскільки ділянка місткості, реєстрована принаймні однією камерою принаймні однієї додаткової системи стеження, набагато менша, ніж ділянка, реєстрована принаймні однією камерою першої системи стеження, тобто, принаймні одна камера додаткової системи стеження має, наприклад, набагато менший апертурний кут, ніж принаймні одна камера першої системи стеження, вирівнювання може відбуватися протягом вкрай короткого часу дуже точно з використанням відеоданих, передаваних принаймні однією додатковою системою стеження. Винахід детальніше пояснюється нижче на прикладах його здійснення за допомогою креслень, на яких зображають: - Фіг. 1: схематично етикетувальну машину обертального типу; - Фіг. 2-7: різні стани для пояснення алгоритму при визначенні кута повороту підставок для місткостей, необхідного для коректування орієнтації. Зображена на Фіг. 1 і позначена, в цілому, поз. 1 етикетувальна машина служить для етикетування місткостей 2, наприклад пляшок, які подають до етикетувальної машини 1 на вході 3 і які залишають етикетувальну машину 1 з наліпленими етике 94895 6 тками на виході 4. Місткостями 2 є, наприклад, пляшки з просвічуваного матеріалу, наприклад скла, і споряджені на своїй зовнішній стороні відповідно принаймні однією типовою геометричною ознакою, наприклад орнаментом, тисненням, опуклими написами і т.д. Місткості 2 повинні бути споряджені етикетками з високою точністю розміщення по відношенню до цих геометричних ознак. Етикетувальна машина 1 містить, зокрема, обертовий стіл або ротор 5, що приводиться в обертання навколо вертикальної осі машини за стрілкою А, який має на своїй периферії велику кількість тримачів або підставок 6 для місткостей, що розподілені навколо вертикальної осі машини з рівними кутовими відстанями і на яких для розміщення етикеток встановлені місткості 3 із своєю віссю паралельно вертикальній осі машини. Місткості 2 подають до етикетувальної машини 1 на вході 3 по транспортеру (не показаний), хоча й "стоячи", тобто з орієнтацією їх осей у вертикальному напрямі, проте з довільною, чисто випадковою орієнтацією також по відношенню до їх типових геометричних ознак, передають кожну з цією чисто випадковою орієнтацією до підставки 6, а потім вирівнюють в кутовому діапазоні W1 обертального руху А ротора 5, так що кожна місткість 3 в кінці цього кутового діапазону стає точно вирівняною по відношенню до своїх типових геометричних ознак, тобто має задану орієнтацію. В цьому стані кожна місткість 2 рухається мимо обертової спільно з ротором 5 етикетувальної станції 7 для розміщення принаймні однієї етикетки, так що вона потім виявляється розміщеною на відповідній місткості 2 з бажаною високою точністю по відношенню до її геометричних ознак. В наступному за етикетувальною станцією 7 до виходу 3 кутовому діапазоні W2 обертального руху А ротора 5 відбувається потім звичайне притиснення етикеток валиком і/або щіткою. Для вирівнювання місткостей 2 підставки 6 встановлено з можливістю обертання за допомогою власних сервоприводів навколо осі паралельно вертикальній осі машини, а саме з управлінням за допомогою детальніше описаної нижче багатоступеневої системи розпізнавання зображень з кількома електронними камерами 9-11 і відповідним, утвореним переважно комп'ютером, електронним блоком 12 обробки і управління. В зображеному варіанті обертові спільно з ротором 5 камери 8-11 встановлені відповідно радіально за межами траєкторії руху підставки 6 з можливістю реєстрації кожною камерою місткостей 2, що рухаються мимо, принаймні на контрольній ділянці або на ділянці їх зовнішньої поверхні, що має типові геометричні ознаки. Крім того, всі камери 8-11 перебувають у межах кутового діапазону W1 і, тим самим, у напрямку А обертання перед етикетувальною станцією 7. Детальніше обидві камери 8, 9, встановлені на наступній за входом 3 ділянці кутового діапазону W1, утворюють першу систему стеження або перший ступінь системи розпізнавання зображень, а саме разом з обертовим спільно з ротором 5 фоновим елементом 13, що створює білий фон або біле фонове дзеркало, який в зображеному варіа 7 нті розташований по відношенню до кругової траєкторії руху підставок 6 радіально всередині і напроти обох камер 8, 9, а також разом із позначеним стрілкою В1 освітленням переднього плану. Обидві камери 8, 9 встановлено своїми оптичними осями під кутом одна до одної з можливістю реєстрації ними ділянки периферії або розгортки більше 180° відповідно місткості 2, що рухається мимо. Передавані обома камерами 8, 9 зображення або відеодані складають для цього, наприклад, в одне загальне зображення або в один загальний набір даних, яке або який відповідає відображенню розгортки або ділянки периферії місткості більше 180°. За першим ступенем системи розпізнавання зображень йде утворений єдиною камерою 10 другий ступінь цієї системи. Камера 10 споряджена фоновим елементом 14, відповідним елементу 13, що створює білий фон або біле фонове дзеркало, а саме в зображеному варіанті по відношенню до траєкторії руху підставки 6 радіально всередині. Далі також цей другий ступінь має освітлення переднього плану, позначене стрілкою В2. Зрозуміло, що елементи 13, 14 першого і другого ступенів можуть бути утворені також єдиним суцільним елементом. Освітлення переднього плану для обох ступенів може бути утворене також одним або кількома загальними джерелами світла, наприклад світними екранами. У принципі, залежно від оптичних властивостей місткостей для освітлення переднього плану може бути вибрана освітлювальна техніка, що забезпечує оптимальну реєстрацію ознак, використовуваних для вирівнювання місткостей. Далі за рахунок спеціального виконання фонового елемента 13 і/або 14, наприклад, за рахунок часткового затемнення білого фонового елемента 13 і/або 14, може бути досягнута посилена оптична реєстрація крайкових профілів ознак, що використовуються для вирівнювання місткостей. У напрямі А обертання за другим ступенем (камера 10) йде утворений єдиною камерою 11 третій ступінь системи розпізнавання зображень, а саме з фоновим освітленням В3, утвореним, наприклад, обертовим разом з ротором 5 світним екраном 15 на протилежній до камери 11 стороні траєкторії руху підставки 6. Фонове освітлення В3 вибрано або може бути налаштованим по кольору і/або інтенсивності залежно від оптичних властивостей місткостей 2 або матеріалу місткостей і/або залежно від оптичних властивостей вмісту для максимально оптимальної оптичної реєстрації. Детальніше вирівнювання місткостей 2 за допомогою системи розпізнавання зображень відбувається таким чином, що за допомогою першого ступеня або обох камер 8, 9 реєструють відповідну випадкову орієнтацію місткості 2, що рухається мимо, з однією підставкою на кожну місткість. За рахунок наступного порівняння зображень або відеоданих, передаваних обома системами 8, 9 стеження, в електронному блоці 12 із даними, що зберігаються в ньому в пам'яті, для відповідного типу місткостей зображеннями або відеоданими або типовими параметрами в електронному блоці 12 визначають актуальну орієнтацію відповідної 94895 8 місткості 2, на цій основі визначають необхідне коректування для досягнення потрібного попереднього вирівнювання і за допомогою відповідного управління сервоприводом відповідної підставки 6 здійснюють коректування. Для кожної окремої місткості 2 за допомогою управління підставкою 6 описаним способом здійснюють коректування положення, так що кожна місткість виявляється вирівняною принаймні з попередньою точністю положення, яка забезпечує подальшу точну реєстрацію положення принаймні однієї типової ознаки, що використовується для остаточного вирівнювання. На утвореному камерою 10 другому ступені системи розпізнавання зображень кожну місткість 2, що проходить мимо, реєструють на більш вузькій ділянці її типової геометричної ознаки. Оптика камери 10 виконана для цього, наприклад, так, що апертурний кут камери 10 менший відповідного апертурного кута камер 8, 9, а ділянка відповідної місткості, що має типову геометричну ознаку, відображається з максимальним заповненням формату. Створене кожною місткістю 2 зображення порівнюють в електронному блоці 12 із зображенням, що зберігається там для даного типу місткостей, або з тими параметрами, що зберігаються там для даного типу місткостей, визначають на цій основі необхідне коректування положення і потім ініціюють його за допомогою відповідного управління сервоприводом відповідною підставкою 6. За рахунок зменшеної до типової ознаки ділянки зображення за допомогою другого ступеня системи розпізнавання зображень вже досягається дуже точне, різко поліпшене вирівнювання кожної місткості 2, зокрема, також в порівнянні з попереднім вирівнюванням (за допомогою першого ступеня). За допомогою утвореного камерою 11 третього ступеня відбувається потім тонке юстування або тонке вирівнювання кожної місткості 2, перш ніж вона досягне етикетувальної станції 7. Як критерій при цьому тонкому вирівнюванні використовують, наприклад, принаймні один крайковий профіль або принаймні одну типову точку крайки, а саме, принаймні на одній типовій ознаці, що використовується для вирівнювання місткості, і/або в зоні цієї ознаки. Передані камерою 11 відеодані порівнюють в електронному блоці 12 з збереженими там відеоданими для відповідного типу місткостей, або з тими параметрами, що зберігаються там для відповідного типу місткостей, так що потім із цього порівняння може бути обчислене, а за допомогою відповідного управління сервоприводом відповідної підставки здійснене необхідне коректування положення. За рахунок описаної триступеневої оптичної реєстрації місткостей 2 або їх типових ознак дуже точне вирівнювання подаваних до етикетувальної машини 1 місткостей з довільною орієнтацією або довільним позиціонуванням досягається всього чотирма камерами, перш ніж місткості потраплять до етикетувальної станції 7, що забезпечує бажану точність розміщення етикеток по відношенню до типових геометричних ознак з високою надійністю навіть за дуже високої продуктивності етикетува 9 льної машини, наприклад, декілька десятків тисяч місткостей на годину. Деталі алгоритму, використовуваного для визначення необхідного коректування принаймні на одному із ступенів системи розпізнавання зображень, пояснюються нижче. Для здійснення точного розпізнавання кута повороту з точністю принаймні один градус слід врахувати циліндричну геометрію поверхні пляшки. За відомої геометрії зйомки (відстань камери до пляшки, діаметр пляшки) і відомої геометрії витисненого візерунка можна зробити доданий розрахунок для кожного кута повороту пляшки (наприклад, кроками по 0,5 градуса) того, як витиснений візерунок для спостерігача (камери) спотворюється на поверхні пляшки. Ці обчислені спотворені витиснені візерунки слід порівняти із спостережуваним витисненим візерунком на знятій пляшці. Той обчислений витиснений візерунок, який краще всього збігається із спостережуваним візерунком, і визначає кут повороту пляшки. На Фіг. 2 зображений, суттєво у вигляді спереду, витиснений на пляшці візерунок 16, як приклад типової ознаки. Край і середина пляшки позначені відповідно тонкою вертикальною червоною лінією. Приймається, що цьому вигляду спереду відповідає кут повороту нуль градусів. Природним чином нульову точку кута повороту визначають на основі симетрії витисненого візерунка (тобто "в середині витисненого візерунка"). Уздовж горизонтальної контрольної лінії 17 вказані ті точки 17.1-17.7, в яких тиснення перетинає контрольну лінію 17. Ці точки називаються далі точками тиснення. Змінна хі позначає побачене положення точки тиснення на знятому зображенні, a zi позначає світлові координати на поверхні пляшки. Поточний індекс і нумерує окремі точки тиснення. На Фіг. 3 зображено той же витиснений візерунок, причому пляшка повернута на 24 градуси вліво. Також на цьому зображенні марковані точки тиснення. За рахунок повороту пляшки характерним чином змінилися положення і відстані між точками тиснення 17.1-17.7. Наприклад, через перспективне спотворення на циліндричному корпусі пляшки скорочується в порівнянні з неповернутим станом видима відстань між двома сусідніми точками тиснення, які наблизилися до лівого краю пляшки. За ще більшого повороту частини витисненого візерунка щезли б за горизонтом пляшки. Геометричний розрахунок у відповідності з Фіг. 5 приводить до формул (1) і (2). dR sinzi R , (1) xi d R coszi R 2 dR d 2 R 2 x i R 2 d 2 . (2) z i 2R arctan x d R При цьому R позначає радіус пляшки, a d - відстань камери до середини пляшки. За допомогою цих формул можна побачене положення хі точок 17.1-17.7 тиснення перерахувати в світлові координати zi на поверхні пляшки і навпаки. Щоб можна було обчислити точний розподіл точок 17.1-17.7 тиснення уздовж горизонтальної контрольної лінії 17 у довільний кут повороту 94895 10 пляшки, повинно бути відомим положення zi всіх точок 17.1-17.7 тиснення на поверхні пляшки за відомого кута повороту (наприклад, нуль градусів) відносно осі симетрії (нульова точка) витисненого візерунка. Положення zi однієї точки тиснення визначається при цьому відстанню, виміряною від побаченої середини пляшки уздовж її поверхні. У принципі, положення zi окремих точок тиснення відносно середньої лінії можна виміряти, приклавши мірну стрічку до тіла пляшки, і подати у вигляді реєстру в розпорядження алгоритму розпізнавання. Формула (2) дозволяє, проте, отримати цю інформацію безпосередньо із знятого зображення. Для цього на зображенні за допомогою відомого кута повороту визначають побачене положення хі. За відомого радіуса R пляшки і відомої відстані d до відповідної камери 8, 9, 10, 11 можна за допомогою формули (2) визначити з цього світлові координати zi на поверхні пляшки. За рахунок цього сильно спрощується завчання витисненого візерунка для алгоритму розпізнавання. Як позначено на Фіг. 2 і 3 точками 17.1-17.7 тиснення, можна у вигляді комп'ютерної програми створити керівництво користувача, за допомогою якого він зможе маркувати точки перетину витисненого візерунка з контрольною лінією 17. Формула (2) дозволяє тоді зразу ж перерахувати клацнуті мишею екранні функції хі в світлові координати zi на поверхні пляшки. Так, користувач може надати в розпорядження алгоритму витиснений візерунок у вигляді переліку точок 17.1-17.2 тиснення. Якщо один раз точки zi тиснення визначені як світлові координати для витисненого візерунка, то вони можуть бути перераховані за допомогою формули (1) для будь-яких кутів повороту пляшки в зворотному порядку в видимі положення хі. Отже, алгоритм розпізнавання може обчислити для всіх можливих кутів повороту пляшки видимі положення хі() для даного витисненого візерунка. На практиці зарекомендувало себе те, що алгоритм розпізнавання здійснює цей розрахунок для всіх кутів к повороту з кутовою відстанню 0,25 градуса, тобто к=0,25 градусаk, де k=0,±1,±2,±3. Алгоритм розпізнавання може для кожного кута к тримати в пам'яті відповідний розподіл видимих положень хі(к) і не повинен наново обчислювати їх для пошуку візерунка в наступній пляшці з таким же витисненим візерунком. Завдяки цьому можна значно скоротити час обчислень. На наступному етапі алгоритм повинен вирішити, який розподіл хі(к) краще всього підходить до спостереженої на зображенні ситуації. Для цього застосовують спосіб, який полягає в тому, що кожному розподілу хі(к) відповідає оціночний коефіцієнт Sk. Цей оціночний коефіцієнт розрахований так, що він тим вище, чим краще спостережена ситуація підходить до розподілу. Найбільший оціночний коефіцієнт SkMax, досяжний для даної ситуації зображення, визначає, тим самим, кут kMах повороту пляшки. Для розрахунку оціночного коефіцієнта Sk насамперед визначають профіль Н(х) яскравості уздовж контрольної лінії 17 (фіг. 6). При цьому х позначає положення елементів зображення уздовж горизонтального контрольного профілю. 11 В такому профілі яскравості точки тиснення виділяються за рахунок помітних коливань яскравості на шкалі довжини, яка відповідає зразковій ширині точки тиснення. На ці коливання яскравості накладені ще інші коливання яскравості, які виникають, проте, на помітно більшій шкалі довжини і можуть бути відокремлені тим самим від коливань яскравості, викликаних точками тиснення, таким чином: за профілем Н(х) яскравості обчислюють профіль НAve(х) яскравості, згладжуваний на шкалі довжини, що лежить помітно вище за ширину точки тиснення. Цей згладжений профіль HAve(x) яскравості віднімають від первинного профілю Н(х) яскравості і розглядають тільки значення різниць, тобто HSub(x)=|H(x)-HAve(x)|. Ділянки, на яких точки тиснення відсутні, тоді мають дуже малі значення HSub(x), тим часом як в одній точці тиснення виявляються високі значення. Таким чином, за рахунок вибору підхожого порогового значення можна тоді ідентифікувати місця bі точок тиснення на даному зображенні. Оціночний коефіцієнт Sk розподілу побачених положень хі(к) обчислюють тоді наступним чином. Шукають пару b1 і хі точок з мінімальною відстанню. Якщо ця відстань менша заданої максимальної відстані d, то знайдену пару точок оцінюють як підхожу, тобто передбачається, що знайдене на зображенні положення точки b1 тиснення з положенням витисненого візерунка підходить до повороту к пляшки. В цьому випадку до оціночного коефіцієнта додають бонусне значення. Оскільки витиснені візерунки різних пляшок ніколи не бувають точно однаковими, а геометрія і положення пляшок відносно камери під час відеозйомки схильні до коливань, ніколи не можна виходити з точного збігу пари b1 і хі точок. Тому на максимальній відстані d вимагається, щоб точки лежали достатньо близько одна до одної. Якщо пара точок знайдена у такий спосіб, то їх, як вже відповідні, маркують у внутрішньому реєстрі алгоритму. Для точок, що залишилися, процес повторюють до тих пір, доки всі можливі точки або не будуть відповідати, або поки всі точки не будуть розпізнані як відповідні (тобто для точки b1 не була знайдена модельна точка хі, що лежить достатньо близько). Якщо для модельних точок хі не були знайдені відповідні точки b1, то для цього з оціночного коефіцієнта Sk віднімають малусні значення. 94895 12 На Фіг. 7 для зображеного на Фіг. 3 прикладу представлена залежність оціночного коефіцієнта Sk від кута. Видно, що приблизно при - 24 градусах має місце гострий максимум, тобто побачений точковий візерунок b1 краще всього відповідає точковому візерунку хі за кута повороту пляшки 24 градуси. Винахід описано вище на одному прикладі його здійснення. Зрозуміло, що можливі численні зміни і модифікації, що не виходять за рамки ідеї, яка лежить в основі винаходу. Так, наведені вище міркування виходили з того, що перший ступінь системи розпізнавання зображень містить дві камери 8, 9, а другий або третій ступінь - тільки по одній камері 10 або 11. Отже, число камер на цих ступенях також може бути вибрано іншим, причому, однак, необхідно, принаймні доцільно, щоб система стеження першого ступеня реєструвала якомога більшу ділянку периферії кожної місткості 2, що направляється мимо. В зображеному варіанті камери 8-11 виконані і керуються з можливістю створення зображення або набору відеоданих кожної місткості 2, направленої мимо, після чого на основі цього набору відеоданих відбуваються попереднє вирівнювання (на першому ступені), попереднє юстування (на другому ступені) і тонке юстування (на третьому ступені) за допомогою порівняння з відповідними відеоданими. Перелік посилальних позицій 1 - етикетувальна машина 2 - місткість або пляшка 3 - вхід для місткостей 4 - вихід для місткостей 5 - ротор або обертовий стіл 6 - підставка для місткості 7 - етикетувальна станція 8-11 - електронна камера 12 - блок обробки і управління 13, 14 - фоновий елемент або фонове дзеркало 15 - елемент фонового освітлення, наприклад світний екран 16 - витиснений візерунок або ознака місткості 17 - контрольна лінія 17.1-17.7 - точка перетину або тиснення А - напрям обертання ротора 5 В1, В2, В3 - освітлення W1, W2 - кутовий діапазон обертального руху ротора 5. 13 94895 14 15 94895 16 17 Комп’ютерна верстка А. Крулевський 94895 Підписне 18 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for leveling tanks and labeling machine containing this device
Автори англійськоюMenke Herbert
Назва патенту російськоюУстройство для выравнивания емкостей и этикетировочная машина с таким устройством
Автори російськоюМенке Херберт
МПК / Мітки
МПК: B65C 9/06
Мітки: місткостей, етикетувальна, вирівнювання, машина, пристрій, таким, пристроєм
Код посилання
<a href="https://ua.patents.su/9-94895-pristrijj-dlya-virivnyuvannya-mistkostejj-ta-etiketuvalna-mashina-z-takim-pristroehm.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вирівнювання місткостей та етикетувальна машина з таким пристроєм</a>
Система місткостей для щонайменше двох речовин
Номер патенту: 7526
Опубліковано: 15.06.2005
Автор: Підборецький Олександр Сергійович
МПК: B65D 25/04
Мітки: щонайменше, двох, місткостей, речовин, система
Формула / Реферат:
1. Система місткостей для щонайменше двох речовин, кожна з яких містить трубчастий корпус з донним та вхідним краєм, останній з яких закритий кришкою, і принаймні одна з них - клапан, виконаний у формі диска та суцільної периферичної закраїни, що знаходиться усередині місткості і герметично закриває корпус, яка відрізняється тим, що клапан розташований на донному краї корпусу принаймні однієї з місткостей, внутрішня поверхня периферичної...
Утримуючий пристрій для з’єднувального органу і механізм роз’єднання, обладнаний таким пристроєм
Номер патенту: 79932
Опубліковано: 10.08.2007
Автор: Лє Жон Паскаль
МПК: F16B 41/00
Мітки: пристрій, обладнаний, утримуючий, з'єднувального, пристроєм, органу, роз'єднання, таким, механізм
Формула / Реферат:
1. Утримуючий пристрій, призначений для утримання частини (59) з'єднувального органу (52) деталей, що звільнилася внаслідок руйнування зазначеного з'єднувального органу (52), який відрізняється тим, що містить:- нерухому частину (112);- рухому частину (114), що має змогу переміщуватися відносно нерухомої частини (112);- порожнину (116) усередині нерухомої частини (112) і рухомої частини (114);- засіб (120)...
Пристрій для сейсмостійкого монтажу перегородки та перегородка з таким пристроєм

Номер патенту: 81718
Опубліковано: 25.01.2008
Автор: Клейн Жан-П'єр
МПК: E04B 2/82
Мітки: таким, монтажу, пристроєм, пристрій, сейсмостійкого, перегородки, перегородка
Формула / Реферат:
1. Пристрій для сейсмостійкого монтажу перегородки між підлогою (2) та стелею (4) за допомогою каркаса, який містить переважно горизонтальні нижню (8) та верхню (10) рейки, а також переважно вертикальні стояки та облицювальні панелі (6), закріплені на каркасі, який відрізняється тим, що містить з одного боку U-подібну в перерізі профільовану кулісу 18, призначену для фіксації до верхньої рейки (10), а з другого боку - верхню напрямну (30),...
Пристрій обробки білизни і спосіб керування таким пристроєм
Номер патенту: 94551
Опубліковано: 10.05.2011
Автори: Лі Донг Соо, Кім Сунг Мін, Кім На Єун, Воо Кі Чул, Кім Сунг Ріонг, Кім Донг Вон
МПК: D06F 58/00, D06F 29/00
Мітки: білизни, спосіб, таким, керування, пристроєм, пристрій, обробки
Формула / Реферат:
1. Спосіб керування першим пристроєм обробки білизни, що має перший нагрівник, і сусіднім другим пристроєм обробки білизни, що має другий нагрівник, згідно з яким:приводять в дію перший нагрівник першого пристрою обробки білизни; і приводять в дію другий нагрівник другого пристрою обробки білизни, причому етапи приведення в дію проводять або послідовно, або навперемінно.2. Спосіб за п. 1, при якому приведення в дію першого...
Пристрій для перекриття потоку газу для газового лічильника та газовий лічильник з таким пристроєм
Номер патенту: 48975
Опубліковано: 16.09.2002
Автори: Гек Мішель, Шомпуньї Жан-Люк
МПК: F16K 31/44, A62C 2/00, F16K 31/04, G01F 15/00
Мітки: газового, газовий, пристроєм, потоку, газу, таким, пристрій, лічильника, лічильник, перекриття
Формула / Реферат:
1. Пристрій для перекриття (14) потоку газу для газового лічильника (10), конструктивним елементом якого є клапан (20), встановлений з можливістю переміщення відносно сідла клапана (12а) в поздовжньому напрямку, причому вказаний вище клапан сполучений з так званою віссю (22) клапана, спрямованою вздовж цього поздовжнього напрямку, який відрізняється тим, що принаймні на частині вказаної вище осі є різь, і ця частина працює разом з деталлю...
Попередній патент: Стимуляційно-спірометричний комплекс (варіанти)
Наступний патент: Спосіб та пристрій для відтворювання оптичних дисків
Випадковий патент: Процес профілактики пошкодження трубчастих органів