Пристрій для нейруйнівного контролю стінок феромагнітних конструктивних елементів
Номер патенту: 95065
Опубліковано: 11.07.2011
Автори: Бойл Джон Дж., Алерс Роналд Б., Бойкер Томас, Алерс Джордж А.

Формула / Реферат
1. Пристрій для неруйнівного контролю стінок феромагнітних конструктивних елементів, таких як стінки труб або панельні стінки, на наявність тріщин (7, 11) або інших дефектів, що мають подовжену або довгасту форму, з використанням ультразвукових хвиль, насамперед зсувних хвиль, які порушуються високочастотною індуктивною котушкою (4, 20, 21) на ділянці стінки, що намагнічена у заданому напрямку (В) магнітної індукції, які поширюються за траєкторією (17), що задається орієнтацією індуктивної котушки як передавача-перетворювача (4, 20, 21) і прийнятих розташованою на відстані від передавача-перетворювача (4, 20, 21) щонайменше однією індуктивною котушкою як приймача-перетворювача (9, 10, 14, 22, 23, 28), причому напрямок траєкторії (17) поширення ультразвукових хвиль орієнтований під гострим кутом α до напрямку (В) магнітної індукції, а приймач-перетворювач (9, 22, 23) розміщений збоку від траєкторії (17) поширення ультразвукових хвиль і спрямований на розташовану на ній задану контрольовану ділянку (16, 26, 27), який відрізняється тим, що характеристики перетворювачів (4, 9, 10, 14, 20, 21, 22, 23, 28) і визначена залежно від товщини стінки висока частота розраховані на порушення горизонтальних зсувних хвиль більш високого порядку, і що на траєкторії (17) поширення ультразвукових хвиль за контрольованою ділянкою (16) розташований додатковий приймач-перетворювач як еталонний перетворювач (10), спрямований на передавач-перетворювач (4).
2. Пристрій за п. 1, який відрізняється тим, що зазначений гострий кут α становить від 20 до 60°.
3. Пристрій за п. 2, який відрізняється тим, що зазначений гострий кут α становить від 30 до 50°.
4. Пристрій за одним із пп. 1-3, який відрізняється тим, що передавач-перетворювач (4, 20, 21) і приймач-перетворювач (9, 22, 23) орієнтовані відносно встановленого для дефектів основного їх напрямку за кутом падіння й відбиття ультразвукових хвиль.
5. Пристрій за п. 4, який відрізняється тим, що стінка труби намагнічена паралельно її осі, до якої передавачі-перетворювачі (4, 20, 21) і приймачі-перетворювачі (9, 22, 23) орієнтовані під однаковими кутами, що мають протилежний знак.
6. Пристрій за п. 4, який відрізняється тим, що стінка труби намагнічена в її обводовому напрямку, до якого передавачі-перетворювачі й приймачі-перетворювачі орієнтовані під однаковими кутами, що мають протилежний знак.
7. Пристрій за одним із пп. 1-6, який відрізняється тим, що траєкторія (17) поширення ультразвукових хвиль по обидві сторони від передавача-перетворювача (4) використовується для контролю на наявність дефектів, а збоку від траєкторії (17) поширення ультразвукових хвиль розташований другий приймач-перетворювач (14), спрямований на другу контрольовану ділянку.
8. Пристрій за одним із пп. 1-7, який відрізняється тим, що передавач-перетворювач задає напрямок побічного випромінювання ультразвукових хвиль, яке визначається орієнтованими в одному напрямку ділянками (33) провідника, що утворює його.
9. Пристрій за одним із пп. 1-8, який відрізняється тим, що різноспрямовано пересічні траєкторії поширення ультразвукових хвиль, випромінюваних і відповідно прийнятих використовуваними попарно передавачами-перетворювачами (20, 21) і приймачами-перетворювачами (22, 23), визначають межі контрольованих ділянок (26, 27), які впритул примикають одна до одної.
10. Пристрій за одним із пп. 1-9, який відрізняється тим, що передавачі-перетворювачі (20) пов'язані з приймачами-перетворювачами (23, 28) для вимірювання тривалості часу поширення ультразвукових хвиль і ступеня їх загасання.
11. Пристрій за одним із пп. 1-10, який відрізняється тим, що він об'єднаний з такими ж пристроями у систему, яка контролює без пропусків перехідні одну в іншу контрольовані ділянки (26, 27).
12. Пристрій за п. 11, який відрізняється тим, що він розташований на обводовій периферії діагностичного поршня, призначеного для неруйнуючого контролю стінок труб.
13. Пристрій за одним із пп. 1-12, який відрізняється тим, що індуктивна котушка виконана у вигляді передавача-перетворювача або приймача-перетворювача на трикутній поверхні-основі.
14. Пристрій за одним із пп. 1-13, який відрізняється тим, що провідники, які утворюють індуктивну котушку, розташовані меандроподібно з паралельним розташуванням безлічі їх довгих ділянок (32).
15. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників з'єднані між собою дугоподібними переходами (31).
16. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників з'єднані між собою короткими ділянками (33), орієнтованими в одному напрямку.
17. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників з'єднані між собою їх розширеними ділянками (35).
18. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників, які утворюють індуктивну котушку (36), розташовані одна від одної на різних, що монотонно змінюються у порядку їх проходження одна за одною відстанях.
19. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників (37), які утворюють індуктивну котушку, мають односпрямовано вигнуту форму.
20. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників утворюють декілька їх окремо керованих витків (38, 39).
Текст
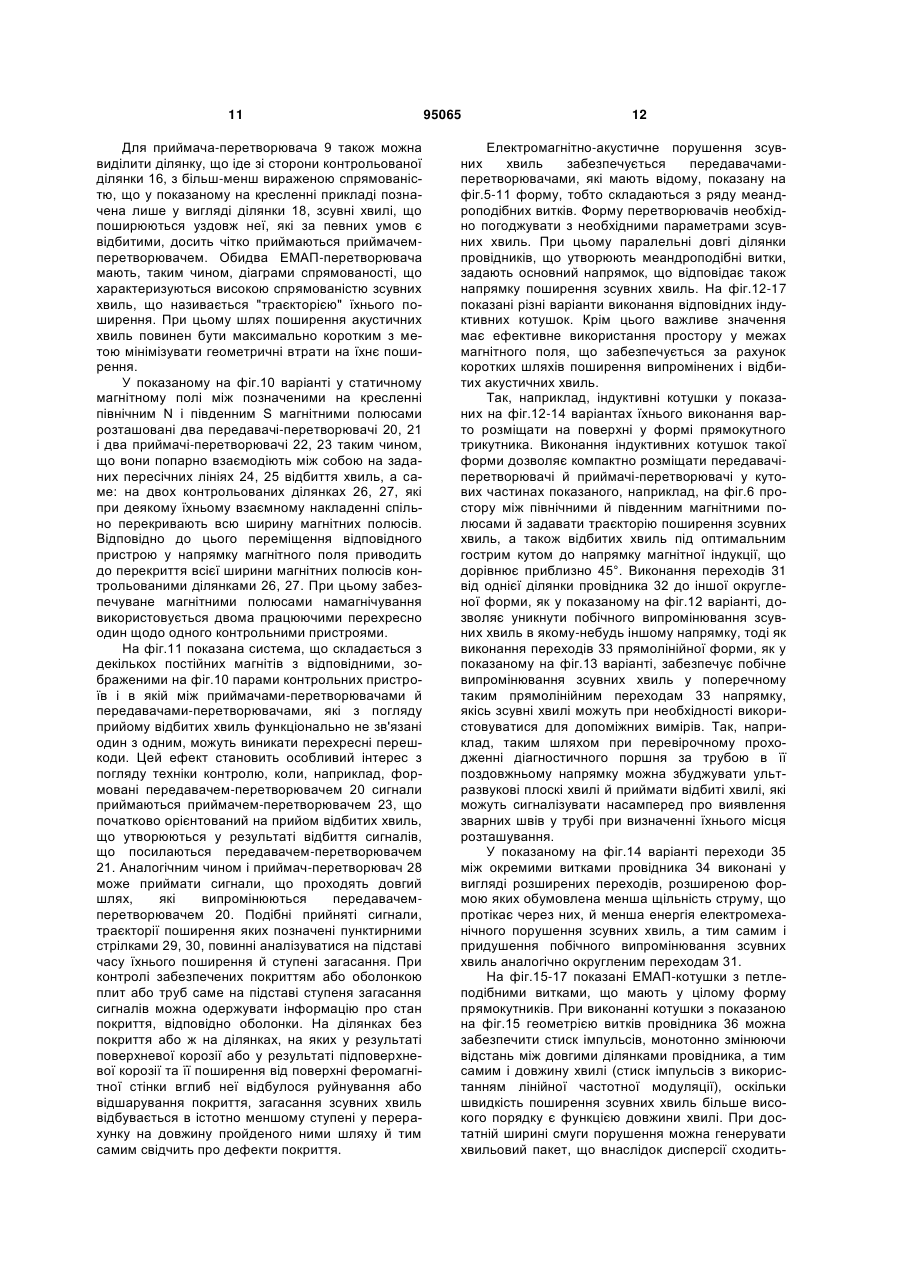
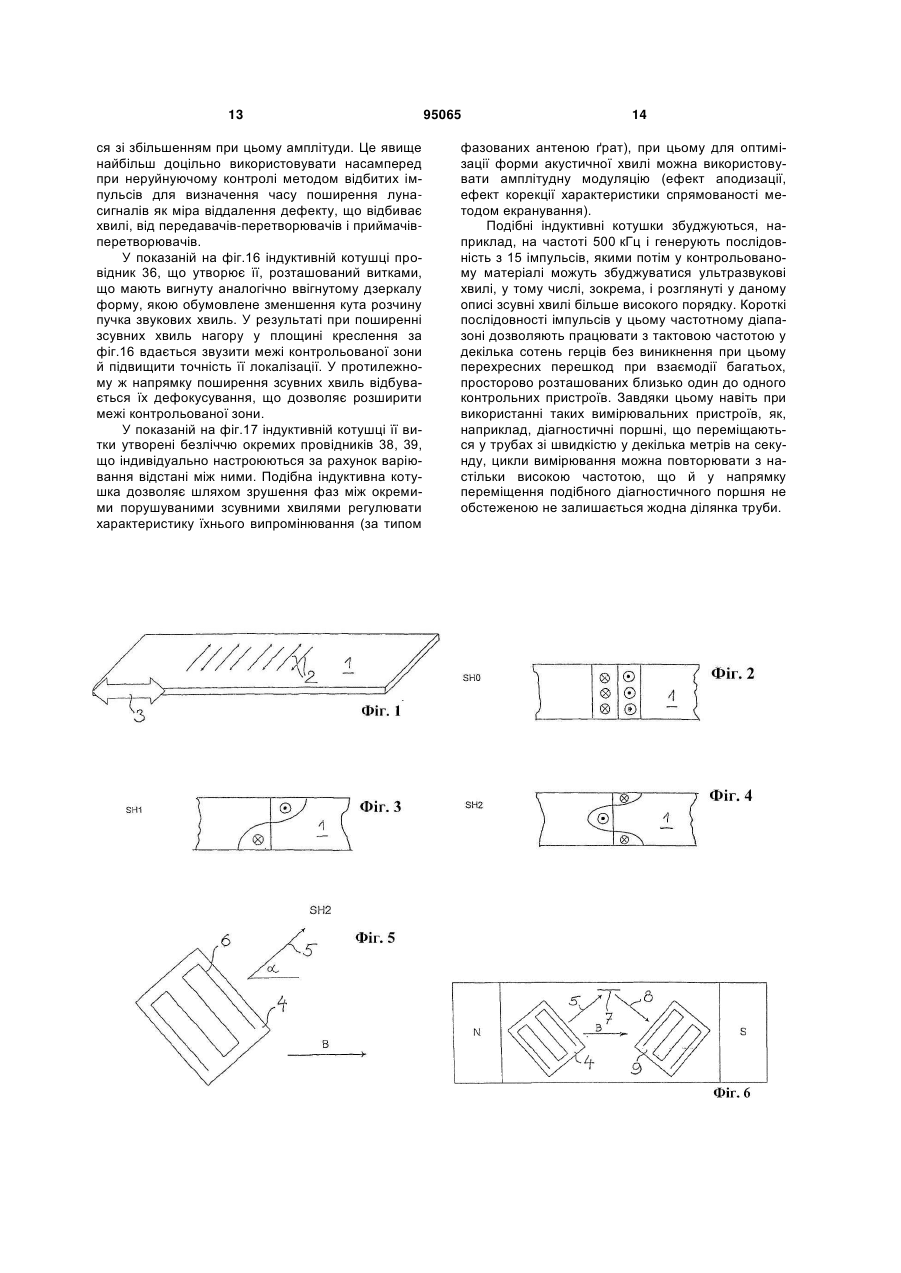
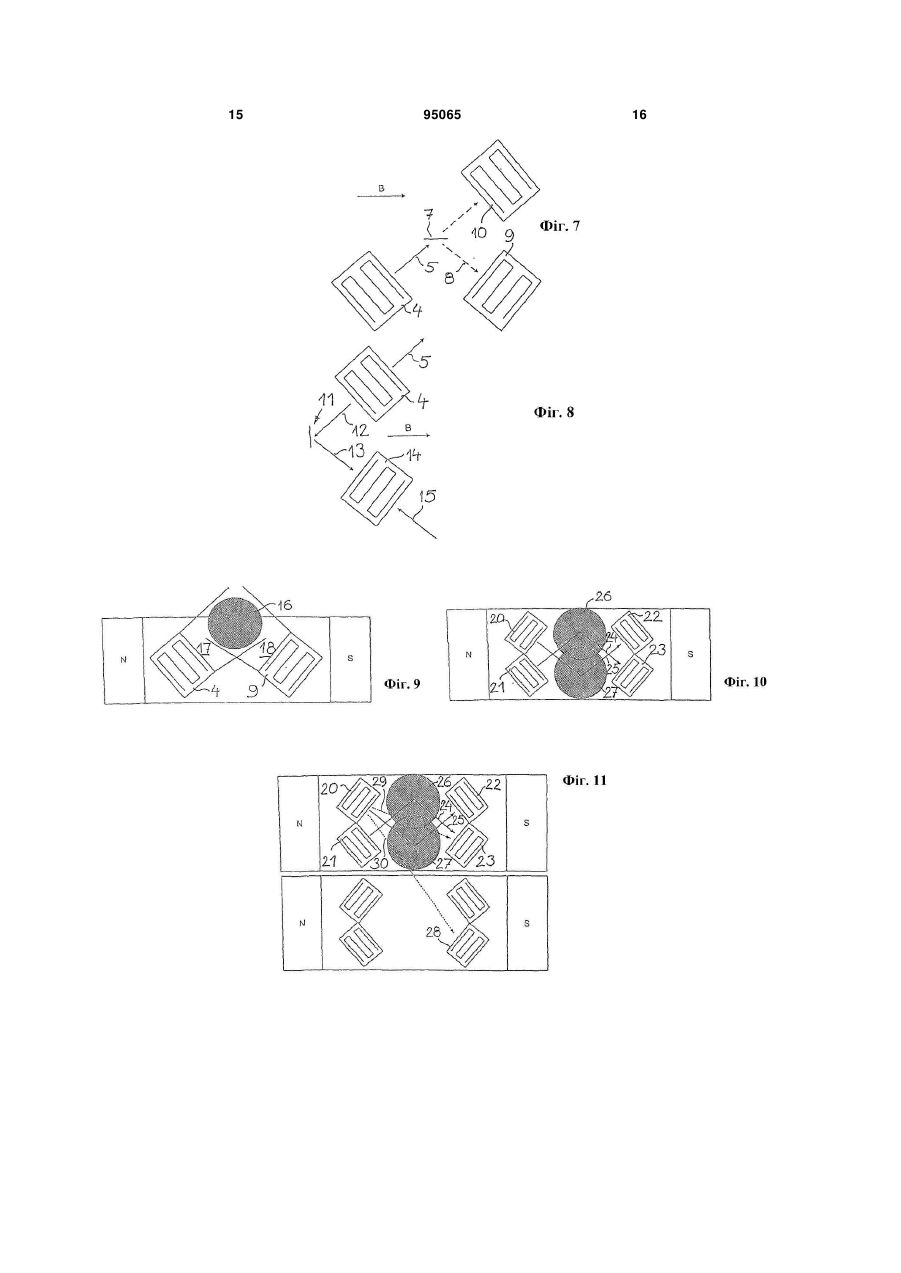
1. Пристрій для неруйнівного контролю стінок феромагнітних конструктивних елементів, таких як стінки труб або панельні стінки, на наявність тріщин (7, 11) або інших дефектів, що мають подовжену або довгасту форму, з використанням ультразвукових хвиль, насамперед зсувних хвиль, які порушуються високочастотною індуктивною котушкою (4, 20, 21) на ділянці стінки, що намагнічена у заданому напрямку (В) магнітної індукції, які поширюються за траєкторією (17), що задається орієнтацією індуктивної котушки як передавачаперетворювача (4, 20, 21) і прийнятих розташованою на відстані від передавача-перетворювача (4, 20, 21) щонайменше однією індуктивною котушкою як приймача-перетворювача (9, 10, 14, 22, 23, 28), причому напрямок траєкторії (17) поширення ультразвукових хвиль орієнтований під гострим кутом α до напрямку (В) магнітної індукції, а приймачперетворювач (9, 22, 23) розміщений збоку від траєкторії (17) поширення ультразвукових хвиль і спрямований на розташовану на ній задану контрольовану ділянку (16, 26, 27), який відрізняється тим, що характеристики перетворювачів (4, 9, 10, 14, 20, 21, 22, 23, 28) і визначена залежно від товщини стінки висока частота розраховані на порушення горизонтальних зсувних хвиль більш високого порядку, і що на траєкторії (17) поширення ультразвукових хвиль за контрольованою ділянкою (16) розташований додатковий приймачперетворювач як еталонний перетворювач (10), спрямований на передавач-перетворювач (4). 2 (19) 1 3 95065 4 11. Пристрій за одним із пп. 1-10, який відрізняється тим, що він об'єднаний з такими ж пристроями у систему, яка контролює без пропусків перехідні одну в іншу контрольовані ділянки (26, 27). 12. Пристрій за п. 11, який відрізняється тим, що він розташований на обводовій периферії діагностичного поршня, призначеного для неруйнуючого контролю стінок труб. 13. Пристрій за одним із пп. 1-12, який відрізняється тим, що індуктивна котушка виконана у вигляді передавача-перетворювача або приймачаперетворювача на трикутній поверхні-основі. 14. Пристрій за одним із пп. 1-13, який відрізняється тим, що провідники, які утворюють індуктивну котушку, розташовані меандроподібно з паралельним розташуванням безлічі їх довгих ділянок (32). 15. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників з'єднані між собою дугоподібними переходами (31). 16. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників з'єднані між собою короткими ділянками (33), орієнтованими в одному напрямку. 17. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників з'єднані між собою їх розширеними ділянками (35). 18. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників, які утворюють індуктивну котушку (36), розташовані одна від одної на різних, що монотонно змінюються у порядку їх проходження одна за одною відстанях. 19. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників (37), які утворюють індуктивну котушку, мають односпрямовано вигнуту форму. 20. Пристрій за п. 14, який відрізняється тим, що довгі паралельні ділянки провідників утворюють декілька їх окремо керованих витків (38, 39). Даний винахід відноситься до пристрою для неруйнуючого контролю стінок феромагнітних конструктивних елементів відповідно до обмежувальної частини п. 1 формули винаходу. Різні конструктивні елементи й насамперед конструктивні елементи, експлуатовані поза приміщеннями, тобто на відкритому повітрі, щоб уникнути їхнього виходу з ладу у результаті руйнування, деформації або порушення герметичності необхідно періодично піддавати контролю на наявність можливих дефектів. Так, зокрема, стінки труб, а також стінки різних ємностей або інших аналогічних конструкцій, виготовлених зі сталі, часто піддані корозії. Подібні конструкції можуть піддаватися насамперед корозійному розтріскуванню під напругою з утворенням типових тріщин або сіток тріщин, що поширюються з поверхні конструкційного матеріалу вглиб його. Аналогічним чином тріщини можуть утворюватися й з інших причин, насамперед при перевантаженнях. Крім тріщин у конструкціях можуть виникати й інші дефекти, наприклад, осередки корозії, виявлення яких також становить інтерес при неруйнуючому контролі. Для неруйнуючого контролю використовують, наприклад, ультразвукові методи, що дозволяють збуджувати акустичні хвилі у стінці контрольованого конструкційного елемента зовні за допомогою електромагнітно-акустичних перетворювачів. Так званий ЕМАП (електромагнітно-акустичний перетворювач) дозволяє безконтактним шляхом і насамперед навіть без використання передавального середовища збуджувати у подібній стінці акустичні плоскі хвилі. При цьому забезпечується можливість набагато більше простого й різноманітного у порівнянні з механічним порушенням за допомогою п'єзоелектричних перетворювачів порушення хвиль Лемба, так само як і зсувних хвиль, поляризованих паралельно поверхні стінки. Надалі подібні зсувні хвилі поширюються порівняно щільними пучками у двох протилежних напрямках поперечно напрямку поляризації, відповідно коливального зсуву. Такі зсувні хвилі, корисне порушення яких імпульсами із прийнятною частотою повинна забезпечувати високочастотна індуктивна котушка насамперед з геометрично точно настроєними відстанями між провідниками, при цьому прийнятні діапазони частот і відстані між провідниками індуктивної котушки варіюються також у функції товщини стінки, можуть також мати різну форму коливань (моду), що залежить від відстані за товщиною стінки. Так, наприклад, фази коливань зсувної хвилі нульового порядку всередині стінки й в її протилежній поверхні збігаються з фазою її коливань у зовнішній поверхні стінки, тоді як зсувна хвиля першого порядку утворить вузол коливань у точці, що перебуває у середині товщини стінки, а в її протилежній поверхні коливається у протифазі. Зсувні ж хвилі ще більш високого порядку утворюють всередині стінки декілька вузлів коливань. Коливання всіх цих типів по-різному придатні для виявлення дефектів. Крім цього порушення коливань передавачамиперетворювачами й відповідно сприйняття коливань приймачами-перетворювачами повинне відбуватися максимально чітко й без перешкод. Документ US 5,537,876 відноситься до дослідження зварних швів при зварюванні сталевих листів впритул, для чого котушки передавача й приймача розташовують на одній загальній траєкторії випромінювання й відбиття сигналу для виявлення зварних швів, що проходять поперек цієї траєкторії. При цьому хоча й показана особлива ефективність горизонтальних зсувних хвиль та їхнє посилене формування завдяки куту між напрямком магнітної індукції й орієнтацією котушки приймача, однак у випадку горизонтальних зсувних хвиль відсутнє розходження між основною хвилею й хвилями більше високого порядку. У цьому випадку критичні дефекти, що звичайно поширюються від поверхні конструктивних елеме 5 нтів, такі як корозія або тріщини, не будуть виявлені. Виходячи з вищевикладеного, в основу даного винаходу було покладене завдання розробити пристрій для неруйнуючого контролю феромагнітних конструктивних елементів зазначеного в обмежувальній частині п. 1 формули винаходу типу, що дозволяло б ефективно й надійно виявляти дефекти заданого виду, у тому числі, зокрема, і тріщини або сітки тріщин, які виникають, наприклад, внаслідок корозійного розтріскування під напругою і які поширюються від поверхні стінки вглиб неї й звичайно мають типову орієнтацію, без значного ускладнення при цьому його конструкції й без нерозмірного збільшення витрати ним енергії. Це завдання відносно пристрою зазначеного в обмежувальній частині п. 1 формули винаходу типу вирішується відповідно до винаходу за допомогою відмітних ознак п. 1 формули винаходу. У процесі вдосконалювання вже відомої методики неруйнуючого контролю феромагнітних конструктивних елементів з використанням порушуваних електромагнітним шляхом ультразвукових зсувних хвиль було встановлено, що в особливих випадках, насамперед при пошуку тріщин, які проникають у стінку тільки на частину її товщини, переважно збуджувати зсувні хвилі більше високого порядку й тим самим досліджувати насамперед приповерхневу зону стінки. Зсувна хвиля вже першого порядку зі зменшуваною у міру її поширення вглиб стінки амплітудою коливань дозволяє у процесі контролю виключити з аналізу з погляду вимірювальної техніки середню, внутрішню ділянку стінки. У ще більшому ступені сказане відноситься до зсувної хвилі другого порядку. Сканування досліджуваної стінки зсувними хвилями більше високого порядку дозволяє підвищити чутливість до приповерхневих дефектів, при цьому, однак, зі збільшенням порядку зсувних хвиль зростає дисперсія мод, що приводить до розсіювання хвильових пакетів. З урахуванням цього використання зсувної хвилі другого порядку є часто найкращим компромісом між вибором глибини, що представляє інтерес, на яку потрібно контролювати стінку, надійністю й функціональністю передавача-перетворювача й інтенсивністю сигналу, достатньою для його надійного прийому приймачемперетворювачем. Для електромагнітного порушення ультразвукових хвиль необхідно передбачити намагнічування контрольованої ділянки стінки конструктивного елемента, для чого звичайно використовують один або декілька постійних магнітів, які, при необхідності разом з ярмом, утворюють магнітний ланцюг, що замикається через стінку контрольованого конструктивного елемента. У цьому випадку можна спостерігати, що орієнтування траєкторії поширення порушуваних хвиль за напрямком магнітної індукції ініціює появу безлічі коливань, у тому числі хвиль Лемба, внаслідок виникаючих при цьому сил Лоренца, однак у розглянутому випадку горизонтально поляризовані зсувні хвилі більше високого порядку, які представляють особливий інтерес і формовані за рахунок магнітострикційних ефектів, доцільно збуджувати й приймати насамперед тоді, 95065 6 коли напрямок траєкторії поширення ультразвукових хвиль орієнтований під гострим кутом до напрямку магнітної індукції. Цей кут між напрямком траєкторії поширення ультразвукових хвиль і напрямком магнітної індукції переважно повинен становити від 10 до 60°, а оптимально - від 20 до 50°. У цьому випадку приймач-перетворювач переважно розміщати збоку від траєкторії поширення ультразвукових хвиль і направляти на розташовану на ній задану контрольовану ділянку, щоб він, з одного боку, надійно приймав розсіяні або відбиті цією контрольованою ділянкою сигнали, а з іншого боку, лише в обмеженому ступені приймав безпосередньо передані передавачем-перетворювачем сигнали, які виходячи з характеристики прийому внаслідок орієнтації приймача-перетворювача на контрольовану ділянку (а не на передавачперетворювач) досягають його у вже ослабленому вигляді. Орієнтацією приймача-перетворювача на задану контрольовану ділянку, розташовану на траєкторії поширення ультразвукових хвиль, що у свою чергу відповідає орієнтації передавачаперетворювача, обумовлене розташування передавача-перетворювача й приймачаперетворювача тільки під кутом один до одного. У випадку тріщин або інших аналогічних дефектів, що мають подовжену або довгасту форму, таких як тріщини внаслідок залишкових напруг або їхньої сітки, варто виходити не з дифузійного розсіювання сягаючих їх зсувних хвиль, а з відбиття хвиль, при якому сягаюча дефекту хвиля відбивається від нього у напрямку, приблизно дзеркальносиметричному напрямку її поширення від передавача-перетворювача, при цьому приймачперетворювач варто розташовувати при відомій або переважній орієнтації дефектів, що представляє інтерес, під кутом до них, що відповідає куту відбиття від них хвиль. Відносно зазначених співвідношень між кутами необхідно також відзначити, що напрямок магнітної індукції не збігається з основним напрямком поширення дефектів. Напрямок намагнічування стінки конструктивного елемента як основи для індуктивної дії передавачів-перетворювачів і приймачів-перетворювачів цілком можна задавати й відмінним від передбачуваного основного напрямку поширення дефектів. Разом з тим задана умова, відповідно до якого траєкторія поширення зсувних хвиль повинна розташовуватися під гострим кутом до напрямку магнітної індукції, а передавачі-перетворювачі й приймачі-перетворювачі повинні взаємодіяти один з одним, забезпечуючи прийом хвиль, відбитих від дефектів, може привести до цілком кращого й простого виводу, відповідно до якого напрямок магнітної індукції може збігатися з основним напрямком поширення дефектів або може бути орієнтований перпендикулярно йому. Геометричні співвідношення необхідно враховувати не тільки для забезпечення ефективного порушення зсувних хвиль і чутливого й надійного контролю феромагнітних стінок на наявність у них дефектів, але й у зв'язку з тим, що ними визнача 7 ється конструктивне виконання пристроїв для неруйнуючого контролю. Для раціонального контролю стінок великої площі, наприклад, стінок великих резервуарів або ємностей, необхідно використовувати пересувні вимірювальні пристрої з безліччю щільно розміщених запропонованих у винаході пристроїв для неруйнуючого контролю, які забезпечують сканування контрольованих ділянок стінки суцільною смугою. Ще більше важливою областю застосування запропонованих у винаході пристроїв є неруйнуючий контроль трубопроводів, стінки яких за всією їхньою окружністю повинні досліджуватися на наявність дефектів при пропущенні за трубами діагностичного поршня (пристрою для огляду трубопроводів). У цьому випадку розмірами труби за її окружністю визначаються розміри зони дії діагностичного поршня, повністю проконтролювати яку можливо тільки при використанні безлічі об'єднаних один з одним у єдину систему запропонованих у винаході пристроїв. Нижче винахід більше докладно розглянутий на прикладі деяких варіантів його здійснення з посиланням на прикладені креслення, на яких показане: на фіг.1 - вид в аксонометрії панельної стінки із зображенням стрілок, що вказують напрямки зсуву часток матеріалу на поверхні стінки під дією зсувної хвилі, на фіг.2-4 - види у поздовжньому розрізі панелі при проходженні через неї зсувних хвиль нульового, першого, відповідно другого порядків, на фіг.5-11 - схематичні види передавачівперетворювачів із вказівкою їхньої орієнтації щодо напрямку магнітної індукції й на фіг.12-17 - схематичні види виконаних за різними варіантами індуктивних котушок для ЕМАП. На фіг.1 показана позначена позицією 1 панель (або відповідний фрагмент стінки) зі зображенням позмінно орієнтованих у протилежні сторони стрілок 2, що вказує напрямки зсуву часток матеріалу під дією стоячої або загасаючої зсувної хвилі у деякий момент часу. Подібна зсувна хвиля може безконтактним шляхом вводитися у панель 1 електромагнітно-акустичним перетворювачем (ЕМАП) приблизно на рівні розташування двоспрямованої стрілки 3, що вказує також два напрямки, в яких у матеріалі пластини поширюються зсувні хвилі. Як показано на фіг.2, 3 і 4, зсувні хвилі жодним чином не повинні рівномірно (синфазно) поширюватися всередину панелі. Рівномірно всередину панелі поширюється тільки зсувна хвиля нульового порядку SH0 згідно фіг.2. Коливання ж зсувної хвилі першого порядку SH1 згідно фіг.3 в однієї поверхні панелі протилежно за фазою її коливанню в іншій поверхні панелі, і тому у середній площині панелі утвориться вузол коливань. Вже за однією цією причиною частки матеріалу панелі всередині неї беруть меншу участь у коливаннях, ніж на її поверхні. Горизонтальна зсувна хвиля другого порядку SH2 з двома вузлами коливань робить ще більший вплив на участь приповерхневих часток матеріалу в її коливаннях, тим більше що коливання у поверхні панелі мають вкрай важливе значення для фо 95065 8 рмування прийнятих сигналів, які можна прийняти зовні за рахунок індуктивного зв'язку. Сказане становить особливий інтерес для виявлення тріщин та інших аналогічних дефектів, що поширюються вглиб панелі або стінки зовні, наприклад, внаслідок корозійного розтріскування під напругою. Особливий інтерес представляють дефекти з обмеженою глибиною їхнього проникнення у панель або стінку й набагато надійніше виявляються за допомогою горизонтальних зсувних хвиль більше високого порядку, ніж за допомогою горизонтальної зсувної хвилі нульового порядку. Таким чином, під "зсувними хвилями більше високого порядку" у цьому випадку маються на увазі зсувні хвилі з порядком вище нульового (SH0). Необхідною умовою порушення подібних зсувних хвиль звичайно є намагнічування феромагнітної стінки, що у загальному випадку являє собою статичне намагнічування магнітним полем магнітного ланцюга з одним або декількома сильними постійними магнітами, створюваний якими магнітний потік вводиться, при необхідності з використанням додатково магнітних ярем і полюсних наконечників, у стінку в її двох віддалених один від одного місцях. Подібне намагнічування феромагнітної стінки умовно показане на фіг.5 стрілкою В для магнітної індукції, що позначає рівномірне й рівноспрямоване намагнічування у панелі, зверху якої розташований передавач-перетворювач 4, призначений для порушення у панелі стрілки 5, що поширюється у напрямку, (і в протилежному напрямку) зсувної хвилі другого порядку SH2. Ефективне порушення зсувних хвиль припускає наявність відповідної геометричної форми у звичайно меандроподібної індуктивної котушки 6 з оптимізованою відстанню між утворюючими її провідниками, а також формування нею збуджуючого зсувну хвилю сигналу насамперед з відповідним чином підібраною високою частотою, що може перебувати, наприклад, у діапазоні від 10 кГц до 5 МГц і конкретне значення якої визначається порядком порушуваної зсувної хвилі й товщиною стінки. При створенні винаходу було встановлено також, що випромінювання зсувної хвилі у напрямку стрілки 5 має особливе значення насамперед для ефективності її порушення, а також для придушення або ослаблення інших хвиль, які через накладення створюють перешкоди при контролі. При цьому зсувну хвилю найбільш переважно випромінювати у напрямку стрілки 5 під гострим кутом до позначеного стрілкою В напрямку магнітної індукції. При випромінюванні зсувних хвиль передавачем-перетворювачем 4 у напрямку магнітної індукції за стрілкою В формується безліч інших хвиль, насамперед хвиль Лемба, тоді як інтенсивність горизонтальних зсувних хвиль другого порядку SH2 досягає максимуму при їхньому випромінюванні у напрямку, що утворює з напрямком магнітної індукції гострий кут, який лежить у діапазоні від 20 до 50°, а при випромінюванні у більше широкому діапазоні гострих кутів, що становить від 10 до 60°, хоча й має трохи меншу величину, проте все ще залишається досить високою. 9 Як наочно показано на фіг.6, магнітна індукція у статичному магнітному полі спрямована за стрілкою В від північного N і до південного S магнітного полюсу, а передавач-перетворювач 4 випромінює горизонтальні зсувні хвилі у напрямку стрілки 5. У показаному на кресленні прикладі зсувні хвилі досягають тріщину 7, що відходить від поверхні, яка має в основному прямолінійну форму й при цьому проникає також углиб контрольованої стінки конструктивного елемента, але лише на деяку частину її товщини. Ця зсувна хвиля, що представляє собою зсувну хвилю більш високого порядку з відповідно переважним її поширенням у приповерхневій зоні контрольованої стінки, при досягненні тріщини зазнає значне відбиття від неї у напрямку стрілки 8. Відбита хвиля приймається приймачемперетворювачем 9, що у принципі може бути виконаний аналогічно передавачу-перетворювачу 4, і передається далі у відповідні вимірювальні й реєструючі пристрої. Тим самим прийняті приймачем-перетворювачем 9 сигнали дозволяють на їхній підставі описати параметри тріщини. При цьому приймач-перетворювач 9 орієнтований перпендикулярно стрілці 8, що вказує напрямок поширення відбитої зсувної хвилі, що відповідно до загальних принципів відбиття хвиль розташовується симетрично напрямку поширення вихідної зсувної хвилі за стрілкою 5 щодо перпендикуляра, проведеного до основного напрямку поширення тріщини 7. У розглянутому прикладі передбачається, що тріщина 7 проходить приблизно паралельно позначеному стрілкою В напрямку магнітної індукції, під тим же гострим кутом до якої у результаті поширюється й відбита хвиля у напрямку стрілки 8. Щодо цього й для приймача-перетворювача 9 створюються оптимальні фізичні умови прийому хвиль. На фіг.7 схематично показана система, в якій напрямок статичного намагнічування також позначений стрілкою В і яка доповнена ще одним приймачем-перетворювачем, а саме: еталонним перетворювачем 10, який виконаний аналогічно приймачу-перетворювачу 9, але розташований навпроти передавача-перетворювача 4 на такому ж віддаленні від нього у напрямку поширення зсувних хвиль за стрілкою 5, що й передавачперетворювач 9, і орієнтований щодо передавачаперетворювача 4 таким чином, що він повністю або частково приймає зсувні хвилі, що проходять. Одержуваний на підставі їх сигнал тим самим являє собою для приймача-перетворювача 9 опорний сигнал, на який можна нормувати прийнятий сигнал при відсутності відбиття, тобто на бездефектній ділянці стінки, і за яким при прийманні приймачем-перетворювачем 9 відбитого сигналу визначається також його інтенсивність. Таким шляхом незалежно від залежного за певних умов від особливостей матеріалу, а також змінної якості введення зсувних хвиль передавачемперетворювачем 4 і незалежно від ефективності прийому хвиль приймачем-перетворювачем 9 одержують основну величину для аналізу геометрії виявленого дефекту. 95065 10 На фіг.8 показана система, яку можна використовувати на додаток до розглянутої вище й показаній на фіг.7 вимірювальній системі або ж як альтернатива їй для контролю стінок на наявність у них поперечних тріщин. У цьому випадку мова йде про дефекти, орієнтованих приблизно перпендикулярно напрямку намагнічування (напрямку стрілки В, що вказує напрямок магнітної індукції). Подібну тріщину 11 можна виявити при поширенні сформованої зсувної хвилі у другому напрямку, тобто у напрямку стрілки 12, протилежному напрямку стрілки 5, і наступному її відбитті від тріщини у напрямку стрілки 13. Така відбита хвиля може прийматися приймачем-перетворювачем 14, який встановлений у прийнятному положенні й відповідним чином орієнтований щодо відбитої хвилі, що поширюється за стрілкою 13. У цьому випадку також утвориться оптимальний кут прийому відбитої хвилі щодо напрямку намагнічування. У взаємодії з декількома передавачамиперетворювачами приймач-перетворювач 14 (і відповідно будь-який інший приймачперетворювач) може приймати зсувні хвилі, що надходять з двох протилежних напрямків, як це зазначено стрілкою 15. Тим самим повинна враховуватися конструкція безлічі передавачівперетворювачів і приймачів-перетворювачів, що мають компактне виконання, які дозволяють за один цикл широким суцільним фронтом досліджувати на наявність дефектів смугу на плоскій стінці або поперечний переріз труби. На фіг.7 і 8 показано далі, що при певній орієнтації й певному розташуванні перетворювачів один щодо одного можна виявляти тріщини, що поширюються у напрямку магнітного поля, і тріщини, що поширюються переважно поперечно напрямку магнітного поля. Тим самим при необхідності виявлення, наприклад, поздовжніх тріщин у трубі, відповідно на ній можливо також намагнічування у поперечному напрямку (в обводовому напрямку), що дозволяє у цьому випадку виявляти поздовжні тріщини й при іншому взаємному розташуванні перетворювачів. На фіг.9-11 показано, яким чином можна забезпечити безперервний контроль ("сканування") стінки феромагнітного конструктивного елемента, насамперед стінки труби, використовуючи у комбінації декілька запропонованих у винаході пристроїв. На фіг.9 показана вже розглянута вище з посиланням на фіг.6 вимірювальна система, в якій між північним N і південним S магнітними полюсами у стінці конструктивного елемента створюється однорідне магнітне поле, в якому між цими магнітними полюсами розташований передавачперетворювач 4 і приймач-перетворювач 9. Обидва перетворювачі спрямовані на контрольовану ділянку 16, яку потрібно перевірити на наявність на ній можливих дефектів. Для цього передавачем-перетворювачем 4 у (необхідному) напрямку випромінюються зсувні хвилі, які на траєкторії 17 їхнього поширення повинні мати задану корисну енергію, що передається з чіткою спрямованістю, хоча й з певним розширенням від передавачаперетворювача 4 вбік контрольованої ділянки 16 і далі за нею. 11 Для приймача-перетворювача 9 також можна виділити ділянку, що іде зі сторони контрольованої ділянки 16, з більш-менш вираженою спрямованістю, що у показаному на кресленні прикладі позначена лише у вигляді ділянки 18, зсувні хвилі, що поширюються уздовж неї, які за певних умов є відбитими, досить чітко приймаються приймачемперетворювачем. Обидва ЕМАП-перетворювача мають, таким чином, діаграми спрямованості, що характеризуються високою спрямованістю зсувних хвиль, що називається "траєкторією" їхнього поширення. При цьому шлях поширення акустичних хвиль повинен бути максимально коротким з метою мінімізувати геометричні втрати на їхнє поширення. У показаному на фіг.10 варіанті у статичному магнітному полі між позначеними на кресленні північним N і південним S магнітними полюсами розташовані два передавачі-перетворювачі 20, 21 і два приймачі-перетворювачі 22, 23 таким чином, що вони попарно взаємодіють між собою на заданих пересічних лініях 24, 25 відбиття хвиль, а саме: на двох контрольованих ділянках 26, 27, які при деякому їхньому взаємному накладенні спільно перекривають всю ширину магнітних полюсів. Відповідно до цього переміщення відповідного пристрою у напрямку магнітного поля приводить до перекриття всієї ширини магнітних полюсів контрольованими ділянками 26, 27. При цьому забезпечуване магнітними полюсами намагнічування використовується двома працюючими перехресно один щодо одного контрольними пристроями. На фіг.11 показана система, що складається з декількох постійних магнітів з відповідними, зображеними на фіг.10 парами контрольних пристроїв і в якій між приймачами-перетворювачами й передавачами-перетворювачами, які з погляду прийому відбитих хвиль функціонально не зв'язані один з одним, можуть виникати перехресні перешкоди. Цей ефект становить особливий інтерес з погляду техніки контролю, коли, наприклад, формовані передавачем-перетворювачем 20 сигнали приймаються приймачем-перетворювачем 23, що початково орієнтований на прийом відбитих хвиль, що утворюються у результаті відбиття сигналів, що посилаються передавачем-перетворювачем 21. Аналогічним чином і приймач-перетворювач 28 може приймати сигнали, що проходять довгий шлях, які випромінюються передавачемперетворювачем 20. Подібні прийняті сигнали, траєкторії поширення яких позначені пунктирними стрілками 29, 30, повинні аналізуватися на підставі часу їхнього поширення й ступені загасання. При контролі забезпечених покриттям або оболонкою плит або труб саме на підставі ступеня загасання сигналів можна одержувати інформацію про стан покриття, відповідно оболонки.На ділянках без покриття або ж на ділянках, на яких у результаті поверхневої корозії або у результаті підповерхневої корозії та її поширення від поверхні феромагнітної стінки вглиб неї відбулося руйнування або відшарування покриття, загасання зсувних хвиль відбувається в істотно меншому ступені у перерахунку на довжину пройденого ними шляху й тим самим свідчить про дефекти покриття. 95065 12 Електромагнітно-акустичне порушення зсувних хвиль забезпечується передавачамиперетворювачами, які мають відому, показану на фіг.5-11 форму, тобто складаються з ряду меандроподібних витків. Форму перетворювачів необхідно погоджувати з необхідними параметрами зсувних хвиль. При цьому паралельні довгі ділянки провідників, що утворюють меандроподібні витки, задають основний напрямок, що відповідає також напрямку поширення зсувних хвиль. На фіг.12-17 показані різні варіанти виконання відповідних індуктивних котушок. Крім цього важливе значення має ефективне використання простору у межах магнітного поля, що забезпечується за рахунок коротких шляхів поширення випромінених і відбитих акустичних хвиль. Так, наприклад, індуктивні котушки у показаних на фіг.12-14 варіантах їхнього виконання варто розміщати на поверхні у формі прямокутного трикутника. Виконання індуктивних котушок такої форми дозволяє компактно розміщати передавачіперетворювачі й приймачі-перетворювачі у кутових частинах показаного, наприклад, на фіг.6 простору між північними й південним магнітними полюсами й задавати траєкторію поширення зсувних хвиль, а також відбитих хвиль під оптимальним гострим кутом до напрямку магнітної індукції, що дорівнює приблизно 45°. Виконання переходів 31 від однієї ділянки провідника 32 до іншої округленої форми, як у показаному на фіг.12 варіанті, дозволяє уникнути побічного випромінювання зсувних хвиль в якому-небудь іншому напрямку, тоді як виконання переходів 33 прямолінійної форми, як у показаному на фіг.13 варіанті, забезпечує побічне випромінювання зсувних хвиль у поперечному таким прямолінійним переходам 33 напрямку, якісь зсувні хвилі можуть при необхідності використовуватися для допоміжних вимірів. Так, наприклад, таким шляхом при перевірочному проходженні діагностичного поршня за трубою в її поздовжньому напрямку можна збуджувати ультразвукові плоскі хвилі й приймати відбиті хвилі, які можуть сигналізувати насамперед про виявлення зварних швів у трубі при визначенні їхнього місця розташування. У показаному на фіг.14 варіанті переходи 35 між окремими витками провідника 34 виконані у вигляді розширених переходів, розширеною формою яких обумовлена менша щільність струму, що протікає через них, й менша енергія електромеханічного порушення зсувних хвиль, а тим самим і придушення побічного випромінювання зсувних хвиль аналогічно округленим переходам 31. На фіг.15-17 показані ЕМАП-котушки з петлеподібними витками, що мають у цілому форму прямокутників. При виконанні котушки з показаною на фіг.15 геометрією витків провідника 36 можна забезпечити стиск імпульсів, монотонно змінюючи відстань між довгими ділянками провідника, а тим самим і довжину хвилі (стиск імпульсів з використанням лінійної частотної модуляції), оскільки швидкість поширення зсувних хвиль більше високого порядку є функцією довжини хвилі. При достатній ширині смуги порушення можна генерувати хвильовий пакет, що внаслідок дисперсії сходить 13 ся зі збільшенням при цьому амплітуди. Це явище найбільш доцільно використовувати насамперед при неруйнуючому контролі методом відбитих імпульсів для визначення часу поширення лунасигналів як міра віддалення дефекту, що відбиває хвилі, від передавачів-перетворювачів і приймачівперетворювачів. У показаній на фіг.16 індуктивній котушці провідник 36, що утворює її, розташований витками, що мають вигнуту аналогічно ввігнутому дзеркалу форму, якою обумовлене зменшення кута розчину пучка звукових хвиль. У результаті при поширенні зсувних хвиль нагору у площині креслення за фіг.16 вдається звузити межі контрольованої зони й підвищити точність її локалізації. У протилежному ж напрямку поширення зсувних хвиль відбувається їх дефокусування, що дозволяє розширити межі контрольованої зони. У показаній на фіг.17 індуктивній котушці її витки утворені безліччю окремих провідників 38, 39, що індивідуально настроюються за рахунок варіювання відстані між ними. Подібна індуктивна котушка дозволяє шляхом зрушення фаз між окремими порушуваними зсувними хвилями регулювати характеристику їхнього випромінювання(за типом 95065 14 фазованих антеною ґрат), при цьому для оптимізації форми акустичної хвилі можна використовувати амплітудну модуляцію (ефект аподизації, ефект корекції характеристики спрямованості методом екранування). Подібні індуктивні котушки збуджуються, наприклад, на частоті 500 кГц і генерують послідовність з 15 імпульсів, якими потім у контрольованому матеріалі можуть збуджуватися ультразвукові хвилі, у тому числі, зокрема, і розглянуті у даному описі зсувні хвилі більше високого порядку. Короткі послідовності імпульсів у цьому частотному діапазоні дозволяють працювати з тактовою частотою у декілька сотень герців без виникнення при цьому перехресних перешкод при взаємодії багатьох, просторово розташованих близько один до одного контрольних пристроїв. Завдяки цьому навіть при використанні таких вимірювальних пристроїв, як, наприклад, діагностичні поршні, що переміщаються у трубах зі швидкістю у декілька метрів на секунду, цикли вимірювання можна повторювати з настільки високою частотою, що й у напрямку переміщення подібного діагностичного поршня не обстеженою не залишається жодна ділянка труби. 15 95065 16 17 Комп’ютерна верстка М. Ломалова 95065 Підписне 18 Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for non-destructive control of walls of ferromagnetic constructional elements
Автори англійськоюAlers Georges A., Alers Ronald B., Boile John J., Boiker Thomas
Назва патенту російськоюУстройство для неразрушающего контроля стенок ферромагнитных конструктивных элементов
Автори російськоюАлерс Джордж А., Алерс Роналд Б., Бойл Джон Дж., Бойкер Томас
МПК / Мітки
МПК: B06B 1/02, G01N 29/04
Мітки: нейруйнівного, елементів, стінок, пристрій, контролю, феромагнітних, конструктивних
Код посилання
<a href="https://ua.patents.su/9-95065-pristrijj-dlya-nejjrujjnivnogo-kontrolyu-stinok-feromagnitnikh-konstruktivnikh-elementiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для нейруйнівного контролю стінок феромагнітних конструктивних елементів</a>
Електромагнітний вимірювальний перетворювач для контролю зміщень конструктивних елементів, фундаментів будівель і споруд та спосіб його застосування
Номер патенту: 86305
Опубліковано: 10.04.2009
Автори: Хілько Сергій Володимирович, Шокарев Віктор Семенович, Чаплигін Валерій Іванович, Волков Дмитро Анатолійович, Гречко Володимир Федорович
МПК: G01B 7/00, G01M 5/00, G01N 27/82
Мітки: елементів, застосування, спосіб, вимірювальний, зміщень, електромагнітний, конструктивних, перетворювач, споруд, будівель, фундаментів, контролю
Формула / Реферат:
1. Електромагнітний вимірювальний перетворювач для контролю зміщень конструктивних елементів, фундаментів будівель і споруд, що містить циліндричну діелектричну втулку, короткі секційні котушки збудження, розташовані на діелектричній втулці, пристрій вимірювання величини індуктивності котушок збудження, розрахунку і відображення зміщень, циліндричний якір, розташований в циліндричній діелектричній втулці, шток, скріплений з корпусом якоря,...
Акустичний резонатор як пристрій для запобігання обледенінню конструктивних елементів літальних апаратів
Номер патенту: 50881
Опубліковано: 15.11.2002
Автори: Крахмальова Тетяна Ігорівна, Кулалаєв Віктор Валентинович, Науменко Павло Олегович
МПК: B64D 15/00
Мітки: апаратів, запобігання, елементів, конструктивних, пристрій, обледенінню, резонатор, акустичний, літальних
Формула / Реферат:
Застосування акустичного резонатора як пристрою для запобігання обледенінню конструктивних елементів літальних апаратів.
Пристрій для ультразвукового контролю товщини стінок труб

Номер патенту: 55616
Опубліковано: 15.04.2003
Автори: Берник Зіновій Андрійович, Лютак Зіновій Петрович, Мельник Іван Богданович, Трощенко Ігор Ярославович, Ніколаєв Олександр Вікторович
МПК: G01B 17/02
Мітки: труб, товщини, ультразвукового, контролю, пристрій, стінок
Формула / Реферат:
1. Пристрій для ультразвукового контролю товщини стінок труб, що містить заповнений імерсійною рідиною корпус та розміщені в ньому п'єзоперетворювачі, який відрізняється тим, що пристрій виконано у вигляді конструкції, що складається з трьох валиків - вимірювального та двох напрямних, які змонтовані на рамі, на якій також змонтовані трубки для подачі води у напрямні валики, перемикач, штуцер рами, напрямна, в якій рухається підпружинений...
Пристрій електроімпульсний вакуумний для очищення конструктивних елементів від забруднень
Номер патенту: 14971
Опубліковано: 15.06.2006
Автори: Федорчук Олексій Петрович, Чоха Юрій Миколайович, Ігнатов Володимир Олексійович
Мітки: забруднень, електроімпульсний, очищення, елементів, вакуумний, пристрій, конструктивних
Формула / Реферат:
Пристрій електроімпульсний вакуумний для очищення конструктивних елементів від забруднень, що містить електропривідну помпу з насадком-каналом, який відрізняється тим, що містить електроімпульсну систему руйнування відкладень у вигляді послідовного з'єднання генератора електроімпульсів, накопичувача-формувача електроімпульсів та індуктора-перетворювача, який розміщений з можливістю переміщення по поверхні тильної сторони забрудненого елемента...
Пристрій електроімпульсний гідравлічний для очищення конструктивних елементів від забруднень
Номер патенту: 14317
Опубліковано: 15.05.2006
Автори: Чоха Юрій Миколайович, Ігнатов Володимир Олексійович, Федорчук Олексій Петрович
Мітки: забруднень, конструктивних, елементів, гідравлічний, пристрій, електроімпульсний, очищення
Формула / Реферат:
Пристрій електроімпульсний гідравлічний для очищення конструктивних елементів від забруднень, що має електропривідну помпу з насадком-каналом, який відрізняється тим, що містить електроімпульсну систему руйнування відкладень у вигляді послідовного з'єднання генератора електроімпульсів, нагромаджувача-формувача електроімпульсів та індуктора-перетворювача, який розміщений з можливістю переміщення по поверхні тильної сторони забрудненого...
Попередній патент: Спосіб одержання циклогексанолу і циклогексанону
Наступний патент: Оцінювання стану об`єкта
Випадковий патент: Спосіб визначення міри дефектності приповерхневих шарів монокристалів германію або кремнію