Пристрій для визначення лінії різання системи виїмки при проходці і риштак для неї
Номер патенту: 95524
Опубліковано: 10.08.2011
Автори: Клабіш Адам, Зіпенкорт Герхард, Беттерманн Дітріх, Хессе Норберт, Дунке Клаус

Формула / Реферат
1. Пристрій для визначення лінії різання системи виїмки при проходці, зокрема системи вугільного струга, що містить переміщуваний конвеєр, складений з окремих риштаків (2) конвеєра (1), кожний з риштаків (2) конвеєра має верхню гілку (34) конвеєра і нижню гілку (32) конвеєра, і напрямну секцію (4), встановлену з боку фронту очисного забою, як напрямний пристрій для виїмкової машини, і має щонайменше один оптичний датчик (20), що містить сенсорну головку (24), розміщену в носії (27) датчика і здатну притискатися за допомогою щонайменше одного притискного засобу (26) до граничної поверхні між вугіллям і підстеляючою гірською породою, яка підлягає виявленню, при цьому розподілена по довжині конвеєра множина риштаків виконана як сенсорні риштаки (50), забезпечені захищеним гніздом (21), відкритим до підстеляючої гірської породи, в якому розташований або може бути розташований носій (27) датчика з можливістю його демонтажу разом з сенсорною головкою (24).
2. Пристрій за п. 1, в якому кожний риштак виконаний як сенсорний риштак або кожний n-ний риштак, зокрема приблизно кожний п'ятий-п'ятнадцятий, переважно приблизно кожний восьмий-десятий риштак конвеєра (1) виконаний як сенсорний риштак (50; 150).
3. Пристрій за п. 1 або 2, в якому носій (27; 127) датчика розташований в гнізді (21; 121), утвореному поблизу бічного профілю (35; 135) на стороні фронту очисного забою верхньої гілки і нижньої гілки конвеєра.
4. Пристрій за будь-яким з пп. 1-3, в якому гніздо виконане в бічній стінці на стороні фронту очисного забою секції конвеєра або в з'єднувальній стінці (17) завальної сторони напрямної секції (4).
5. Пристрій за будь-яким з пп. 1-4, в якому напрямний пристрій (4; 104) машини виконаний як напрямний пристрій струга, що має канали (5, 6; 105, 106) ланцюга і має відстежуюче пристосування (15; 115) машини, і гніздо (21; 121) розташоване із завальної сторони від каналів ланцюга.
6. Пристрій за будь-яким з пп. 1-5, в якому гніздо (21) проходить риштак конвеєра або напрямну секцію риштака від верху до низу і встановлення/демонтаж носія (27) датчика можливий від верхньої гілки конвеєра.
7. Пристрій за п. 6, в якому гніздо (21) має циліндричний поперечний переріз і/або носій (27) датчика виконаний у вигляді переважно циліндричної корпусної деталі, яка здатна вставлятися в гніздо (21) і має розташований в ній притискний засіб, при цьому сенсорна головка (24) встановлена з можливістю зміщення притискним засобом.
8. Пристрій за п. 6 або 7, в якому отвір встановлення/демонтажу для носія (27) датчика герметизований або закритий за допомогою демонтованої деталі бічного профілю, призначеної для вказаного бічного профілю верхньої гілки (34) конвеєра, розташованої з боку фронту очисного забою.
9. Пристрій за будь-яким з пп. 1-5, в якому носій (127) датчика розташований в гнізді (121) з відкритою кромкою на нижній поверхні напрямного риштака або риштака (102, 104) конвеєра, при цьому носій (127) датчика здатний зміщатися відносно напрямної секції або секції риштака конвеєра щонайменше одним притискним засобом (126).
10. Пристрій за п. 9, в якому з'єднувальна стінка (117) напрямного пристрою машини утворює щонайменше частково профільний кінець для скребків в нижній гілці конвеєра і містить точку зварювання для основи нижньої гілки конвеєра, і/або гніздо (121) для детектуючого датчика (20) утворене під основою (130) нижньої гілки конвеєра і на завальній стороні з'єднувальної стінки (117).
11. Пристрій за п. 10, в якому риштак містить опорне ребро (140), розташоване під основою нижньої гілки конвеєра, на якій змонтований з можливістю зміщення носій (127) датчика.
12. Пристрій за будь-яким з пп. 1-11, в якому електронна схема датчика для перетворення оптоелектронного сигналу розташована безпосередньо в гнізді.
13. Пристрій за будь-яким з пп. 1-11, в якому електронна схема датчика розташована на бічній стінці із завальної сторони риштаків, і оптичний з'єднувальний кабель (45) прокладений між верхньою гілкою (34) і нижньою гілкою (32) конвеєра, переважно в проміжному днищі (30).
14. Пристрій за будь-яким з пп. 1-13, в якому притискний засіб складається щонайменше з однієї пружини (26; 126).
15. Пристрій за будь-яким з пп. 1-14, який містить оптичне вікно, зокрема сапфірове вікно (25; 125), з'єднане з сенсорною головкою (24; 124).
16. Пристрій за будь-яким з пп. 1-15, в якому сенсорна головка або оптичне вікно забезпечені запобіжною планкою, переважно V-подібною запобіжною планкою, вершина якої направлена у бік переміщення.
17. Пристрій за будь-яким з пп. 1-16, який містить пневматичний засіб, зокрема засіб подачі стисненого повітря для очищення, при необхідності, оптичного вікна.
18. Пристрій за будь-яким з пп. 1-17, який містить засіб підйому з силовим приводом, протидіючим силі тиску притискного засобу, для підйому, при необхідності, носія сенсорної головки або носія датчика.
19. Риштак для конвеєрної системи виїмки при проходці, який містить риштак (2; 102) конвеєра з верхньою гілкою (34; 134) конвеєра і нижньою гілкою (32; 132) конвеєра і має напрямну секцію (4; 104), встановлену з боку фронту очисного забою, як напрямний пристрій для виїмкової машини, зокрема для використання в пристрої за п. 1 або 2, який відрізняється тим, що містить захищене гніздо (21; 121), відкрите до підстеляючої гірської породи і призначене для розміщення з можливістю демонтажу носія (27; 127) датчика для оптичного датчика, здатного притискатися щонайменше одним притискним засобом (26; 126) до граничної поверхні, що підлягає виявленню, для виявлення граничної поверхні між вугіллям і гірською породою.
20. Риштак за п. 19 в якому носій (27; 127) датчика розташований в гнізді (21; 121), утвореному поблизу бічного профілю (35; 135) на стороні фронту очисного забою верхньої гілки і нижньої гілки конвеєра.
21. Риштак за п. 19 або 20, в якому гніздо виконане в бічній стінці на стороні фронту очисного забою секції конвеєра або в з'єднувальній стінці (17) завальної сторони напрямної секції (4).
22. Риштак за будь-яким з пп. 19-21, в якому напрямний пристрій (4; 104) машини виконаний як напрямний пристрій струга, що має канали (5, 6; 105, 106) ланцюга і має відстежуюче пристосування (15; 115) машини, і гніздо (21; 121) розташоване із завальної сторони від каналів ланцюга.
23. Риштак за будь-яким з пп. 19-22, в якому гніздо (21) проходить риштак конвеєра або напрямну секцію риштака від верху до низу і встановлення/демонтаж носія (27) датчика можливий від верхньої гілки конвеєра.
24. Риштак за п. 23, в якому гніздо (21) має циліндричний поперечний переріз і/або носій (27) датчика виконаний у вигляді переважно циліндричної корпусної деталі, яка здатна вставлятися в гніздо (21) і має розташований в ній притискний засіб, при цьому сенсорна головка (24) встановлена з можливістю зміщення притискним засобом.
25. Риштак за п. 23 або 24, в якому отвір встановлення/демонтажу для носія (27) датчика герметизований або закритий за допомогою демонтованої деталі бічного профілю, призначеної для вказаного бічного профілю верхньої гілки (34) конвеєра, розташованої з боку фронту очисного забою.
26. Риштак за будь-яким з пп. 19-25, в якому носій (127) датчика розташований в гнізді (121) з відкритою кромкою на нижній поверхні напрямного риштака або риштака (102, 104) конвеєра, при цьому носій (127) датчика здатний зміщатися відносно напрямної секції або секції риштака конвеєра щонайменше одним притискним засобом (126).
27. Риштак за п. 26, в якому з'єднувальна стінка (117) напрямного пристрою машини утворює щонайменше частково профільний кінець для скребків в нижній гілці конвеєра і містить точку зварювання для основи нижньої гілки конвеєра, і/або гніздо (121) для детектуючого датчика (20) утворене під основою (130) нижньої гілки конвеєра і на завальній стороні з'єднувальної стінки (117).
28. Риштак за п. 27, в якому риштак містить опорне ребро (140), розташоване під основою нижньої гілки конвеєра, на якій змонтований з можливістю зміщення носій (127) датчика.
29. Риштак за будь-яким з пп. 19-28, в якому електронна схема датчика для перетворення оптоелектронного сигналу розташована безпосередньо в гнізді.
30. Риштак за будь-яким з пп. 19-28, в якому електронна схема датчика розташована на бічній стінці із завальної сторони риштаків, і оптичний з'єднувальний кабель (45) прокладений між верхньою гілкою (34) і нижньою гілкою (32) конвеєра, переважно в проміжному днищі (30).
31. Риштак за будь-яким з пп. 19-30, в якому притискний засіб складається щонайменше з однієї пружини (26; 126).
32. Риштак за будь-яким з пп. 19-31, який містить оптичне вікно, зокрема сапфірове вікно (25; 125), з'єднане з сенсорною головкою (24; 124).
33. Риштак за будь-яким з пп. 19-32, в якому сенсорна головка або оптичне вікно забезпечені запобіжною планкою, переважно V-подібною запобіжною планкою, вершина якої направлена у бік переміщення.
34. Риштак за будь-яким з пп. 19-33, який містить пневматичний засіб, зокрема засіб подачі стисненого повітря для очищення, при необхідності, оптичного вікна.
35. Риштак за будь-яким з пп. 19-34, який містить засіб підйому з силовим приводом, протидіючим силі тиску притискного засобу, для підйому, при необхідності, носія сенсорної головки або носія датчика.
Текст
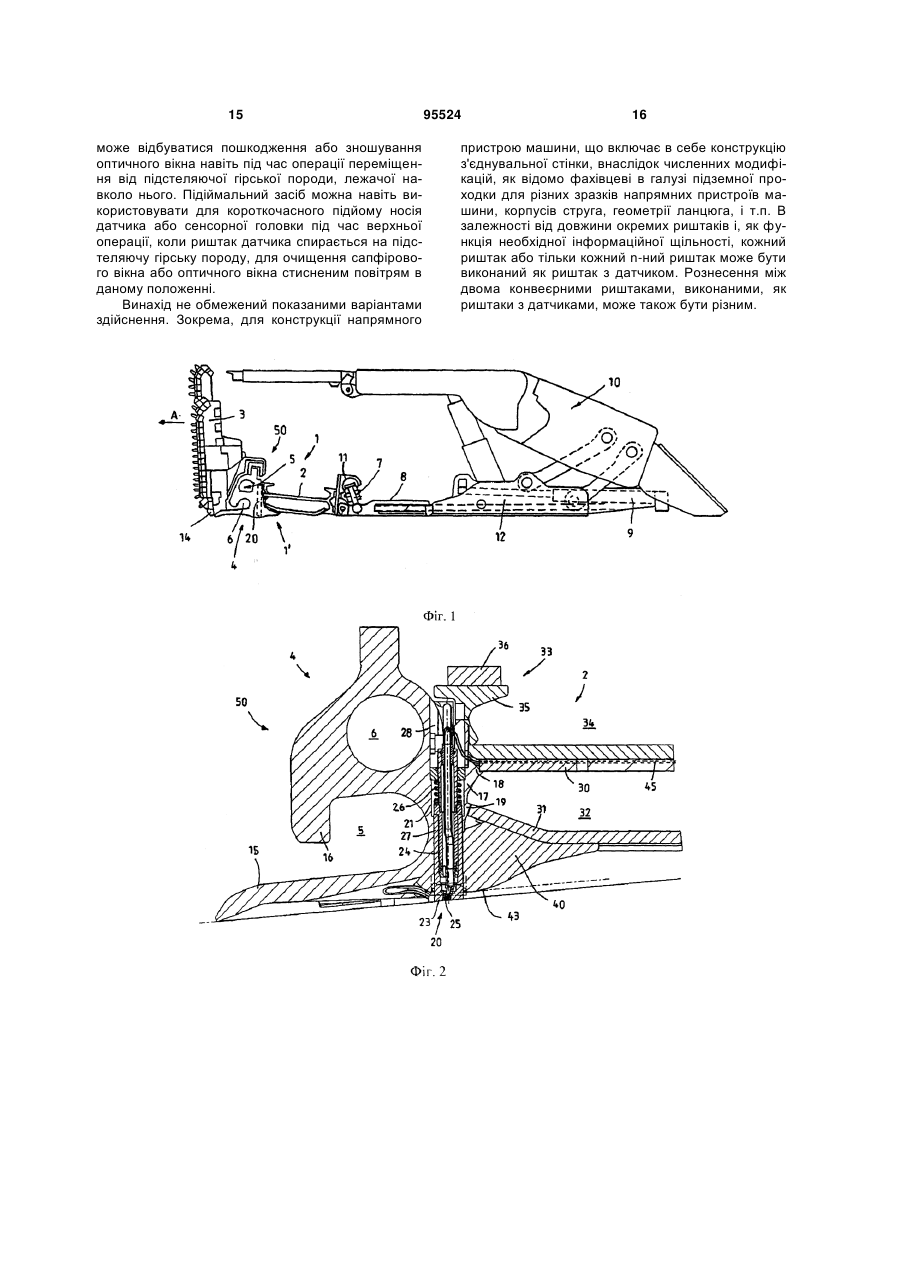
1. Пристрій для визначення лінії різання системи виїмки при проходці, зокрема системи вугільного струга, що містить переміщуваний конвеєр, складений з окремих риштаків (2) конвеєра (1), кожний з риштаків (2) конвеєра має верхню гілку (34) конвеєра і нижню гілку (32) конвеєра, і напрямну секцію (4), встановлену з боку фронту очисного забою, як напрямний пристрій для виїмкової машини, і має щонайменше один оптичний датчик (20), що містить сенсорну головку (24), розміщену в носії (27) датчика і здатну притискатися за допомогою щонайменше одного притискного засобу (26) до граничної поверхні між вугіллям і підстеляючою гірською породою, яка підлягає виявленню, при цьому розподілена по довжині конвеєра множина риштаків виконана як сенсорні риштаки (50), забезпечені захищеним гніздом (21), відкритим до підстеляючої гірської породи, в якому розташований або може бути розташований носій (27) датчика з можливістю його демонтажу разом з сенсорною головкою (24). 2. Пристрій за п. 1, в якому кожний риштак виконаний як сенсорний риштак або кожний n-ний риштак, зокрема приблизно кожний п'ятийп'ятнадцятий, переважно приблизно кожний восьмий-десятий риштак конвеєра (1) виконаний як сенсорний риштак (50; 150). 2 (19) 1 3 гніздо (121) для детектуючого датчика (20) утворене під основою (130) нижньої гілки конвеєра і на завальній стороні з'єднувальної стінки (117). 11. Пристрій за п. 10, в якому риштак містить опорне ребро (140), розташоване під основою нижньої гілки конвеєра, на якій змонтований з можливістю зміщення носій (127) датчика. 12. Пристрій за будь-яким з пп. 1-11, в якому електронна схема датчика для перетворення оптоелектронного сигналу розташована безпосередньо в гнізді. 13. Пристрій за будь-яким з пп. 1-11, в якому електронна схема датчика розташована на бічній стінці із завальної сторони риштаків, і оптичний з'єднувальний кабель (45) прокладений між верхньою гілкою (34) і нижньою гілкою (32) конвеєра, переважно в проміжному днищі (30). 14. Пристрій за будь-яким з пп. 1-13, в якому притискний засіб складається щонайменше з однієї пружини (26; 126). 15. Пристрій за будь-яким з пп. 1-14, який містить оптичне вікно, зокрема сапфірове вікно (25; 125), з'єднане з сенсорною головкою (24; 124). 16. Пристрій за будь-яким з пп. 1-15, в якому сенсорна головка або оптичне вікно забезпечені запобіжною планкою, переважно V-подібною запобіжною планкою, вершина якої направлена у бік переміщення. 17. Пристрій за будь-яким з пп. 1-16, який містить пневматичний засіб, зокрема засіб подачі стисненого повітря для очищення, при необхідності, оптичного вікна. 18. Пристрій за будь-яким з пп. 1-17, який містить засіб підйому з силовим приводом, протидіючим силі тиску притискного засобу, для підйому, при необхідності, носія сенсорної головки або носія датчика. 19. Риштак для конвеєрної системи виїмки при проходці, який містить риштак (2; 102) конвеєра з верхньою гілкою (34; 134) конвеєра і нижньою гілкою (32; 132) конвеєра і має напрямну секцію (4; 104), встановлену з боку фронту очисного забою, як напрямний пристрій для виїмкової машини, зокрема для використання в пристрої за п. 1 або 2, який відрізняється тим, що містить захищене гніздо (21; 121), відкрите до підстеляючої гірської породи і призначене для розміщення з можливістю демонтажу носія (27; 127) датчика для оптичного датчика, здатного притискатися щонайменше одним притискним засобом (26; 126) до граничної поверхні, що підлягає виявленню, для виявлення граничної поверхні між вугіллям і гірською породою. 20. Риштак за п. 19 в якому носій (27; 127) датчика розташований в гнізді (21; 121), утвореному поблизу бічного профілю (35; 135) на стороні фронту очисного забою верхньої гілки і нижньої гілки конвеєра. 21. Риштак за п. 19 або 20, в якому гніздо виконане в бічній стінці на стороні фронту очисного забою секції конвеєра або в з'єднувальній стінці (17) завальної сторони напрямної секції (4). 22. Риштак за будь-яким з пп. 19-21, в якому напрямний пристрій (4; 104) машини виконаний як напрямний пристрій струга, що має канали (5, 6; 95524 4 105, 106) ланцюга і має відстежуюче пристосування (15; 115) машини, і гніздо (21; 121) розташоване із завальної сторони від каналів ланцюга. 23. Риштак за будь-яким з пп. 19-22, в якому гніздо (21) проходить риштак конвеєра або напрямну секцію риштака від верху до низу і встановлення/демонтаж носія (27) датчика можливий від верхньої гілки конвеєра. 24. Риштак за п. 23, в якому гніздо (21) має циліндричний поперечний переріз і/або носій (27) датчика виконаний у вигляді переважно циліндричної корпусної деталі, яка здатна вставлятися в гніздо (21) і має розташований в ній притискний засіб, при цьому сенсорна головка (24) встановлена з можливістю зміщення притискним засобом. 25. Риштак за п. 23 або 24, в якому отвір встановлення/демонтажу для носія (27) датчика герметизований або закритий за допомогою демонтованої деталі бічного профілю, призначеної для вказаного бічного профілю верхньої гілки (34) конвеєра, розташованої з боку фронту очисного забою. 26. Риштак за будь-яким з пп. 19-25, в якому носій (127) датчика розташований в гнізді (121) з відкритою кромкою на нижній поверхні напрямного риштака або риштака (102, 104) конвеєра, при цьому носій (127) датчика здатний зміщатися відносно напрямної секції або секції риштака конвеєра щонайменше одним притискним засобом (126). 27. Риштак за п. 26, в якому з'єднувальна стінка (117) напрямного пристрою машини утворює щонайменше частково профільний кінець для скребків в нижній гілці конвеєра і містить точку зварювання для основи нижньої гілки конвеєра, і/або гніздо (121) для детектуючого датчика (20) утворене під основою (130) нижньої гілки конвеєра і на завальній стороні з'єднувальної стінки (117). 28. Риштак за п. 27, в якому риштак містить опорне ребро (140), розташоване під основою нижньої гілки конвеєра, на якій змонтований з можливістю зміщення носій (127) датчика. 29. Риштак за будь-яким з пп. 19-28, в якому електронна схема датчика для перетворення оптоелектронного сигналу розташована безпосередньо в гнізді. 30. Риштак за будь-яким з пп. 19-28, в якому електронна схема датчика розташована на бічній стінці із завальної сторони риштаків, і оптичний з'єднувальний кабель (45) прокладений між верхньою гілкою (34) і нижньою гілкою (32) конвеєра, переважно в проміжному днищі (30). 31. Риштак за будь-яким з пп. 19-30, в якому притискний засіб складається щонайменше з однієї пружини (26; 126). 32. Риштак за будь-яким з пп. 19-31, який містить оптичне вікно, зокрема сапфірове вікно (25; 125), з'єднане з сенсорною головкою (24; 124). 33. Риштак за будь-яким з пп. 19-32, в якому сенсорна головка або оптичне вікно забезпечені запобіжною планкою, переважно V-подібною запобіжною планкою, вершина якої направлена у бік переміщення. 34. Риштак за будь-яким з пп. 19-33, який містить пневматичний засіб, зокрема засіб подачі стисненого повітря для очищення, при необхідності, оптичного вікна. 5 95524 6 35. Риштак за будь-яким з пп. 19-34, який містить засіб підйому з силовим приводом, протидіючим силі тиску притискного засобу, для підйому, при необхідності, носія сенсорної головки або носія датчика. Винахід стосується пристрою для визначення лінії різання системи виїмки при проходці, зокрема, системи вугільного струга, що має переміщуваний конвеєр, складений з індивідуальних риштаків, який в кожному варіанті має конвеєрний риштак, що має верхню гілку і нижню гілку конвеєра, і напрямну секцію з напрямними елементами, встановлену з боку фронту очисного забою як напрямна для виїмкової машини, і має щонайменше один оптичний детектуючий датчик, призначений для виявлення граничної поверхні між вугіллям і підстеляючою гірською породою, і має сенсорну головку, розміщену на носії датчика і здатну притискатися щонайменше одним притискним засобом до граничного шару, що підлягає виявленню. Винахід також стосується риштака для конвеєра системи виїмки при проходці, що має риштак конвеєра з верхньою гілкою і нижньою гілкою конвеєра і напрямну секцію, встановлену на ньому з боку фронту очисного забою, як напрямний пристрій для виїмкової машини, зокрема, для використання в пристрої даного типу. Протягом довгого часу в підземній проходці робилися спроби виявлення граничної поверхні між підстеляючою гірською породою і вугіллям при проведенні робіт для пристосування (установки лінії різання) підземної виїмкової системи в найбільш оптимальному можливому режимі, згідно з певними значеннями для граничної поверхні, до профілю шару вугілля над шаром гірської породи, яка створює підстеляючу гірську породу, і не підлягає добуванню. Для виявлення граничної поверхні часто використовують оптичні детектуючі датчики, що мають оптичну сенсорну головку і оптичне вікно, з'єднане попереду головки, таке, зокрема, як сапфірове вікно. За допомогою датчиків в сенсорній головці відмінна відбивна здатність підстеляючої гірської породи і вугілля оптично використовується і подається, як сигнал вимірювання через оптичні хвилеводи в оптоелектричний перетворювач і послідовно на блок оцінки, що розраховує профіль граничної поверхні між підстеляючою гірською породою і вугіллям по вихідних сигналах. У системах детектування профілю граничної поверхні між підстеляючою гірською породою і вугіллям, які раніше часто застосовувалися у випробуваннях в підземній проходці, оптичний датчик встановлений у виїмковій машині проходки, в результаті є сигнал, що постійно вимірюється для поточного положення виїмкової машини проходки за допомогою детектуючого датчика або, якщо необхідно, за допомогою двох систем оптичного детектування на машині проходки. Загальний пристрій даного типу для виїмкової системи з вугільним стругом детально описаний в патенті Німеччини 19925949 В1. Відомий детектуючий датчик розташований з можливістю зміщення в носії датчика і закріплений як замінна частина в гнізді в корпусі виїмкового струга. Сенсорна головка зміщається в напрямі підстеляючої гірської породи за допомогою пружини стиснення, для забезпечення контакту з граничною поверхнею, що підлягає виявленню. Носій датчика встановлений позацентрово по відношенню до осі симетрії корпусу струга поблизу одного з двох поворотних носіїв інструмента вугільного струга. Сенсорна головка обладнана з боку одного кінця зношуваним черевиком, призначеним для захисту кристалічного вікна від руйнування. Разом з тим, під час довгострокової експлуатації виявилося, що термін служби оптичного детектуючого датчика є відносно коротким і оптичний детектуючий датчик повинен замінюватися не рідше, ніж через дві-три місяці. Досвід, одержаний під час експлуатації, показує, що термін служби менший, коли більшою вибрана сила тиску на сенсорну головку від пружини, що притискує її до граничної поверхні, що піддягає виявленню, коли більш нерівним є профіль підстеляючої гірської породи з урахуванням заглиблень або поглиблень і коли більшою вибрана швидкість струга. Більш того позацентрове розташування оптичного датчика приводить до різного навантаження для різних напрямів роботи струга. У патенті Німеччини 4414578 С2 для визначення граничної поверхні між підстеляючою гірською породою і вугіллям за допомогою оптичних детектуючих датчиків, заявник запропонував не переміщувати оптичні датчики з виїмковою системою, а вбудувати їх в передню опору відстежуючого пристосування напрямного пристрою машини, щоб оптичні датчики були постійно розташовані над підстеляючою гірською породою і могли виявляти граничну поверхню. Перевага такого, по суті стаціонарного розташування оптичних датчиків полягає в значному збільшенні експлуатаційної надійності з урахуванням значно менших навантажень на індивідуальні детектуючі датчики. Разом з тим, недоліком є наявність тільки дуже незначного простору для установки оптичних детектуючих датчиків на відстежуючому пристосуванні машини для вугільного струга і те, що оптичні хвилеводи повинні прокладатися незахищеними, в будьякому випадку, частково на нижній поверхні відстежуючого пристосування машини. До цього часу, розташування детектуючих датчиків, запропоноване в патенті Німеччини 4414578 С2 практично не реалізоване. Задачею даного винаходу є створення пристрою для визначення лінії різання системи виїмки при проходці і риштака, відповідної для даної мети, що забезпечує надійне виявлення граничної поверхні між вугіллям і підстеляючою гірською породою із збільшеною експлуатаційною надійністю і мінімізованою здатністю до зношування. Згідно з винаходом, задача досягається у відповідному пристрої завдяки розташованій по довжині конвеєра множині риштаків, виконаних як се 7 нсорні риштаки, забезпечені гніздами, розташованими в захищеному положенні або броньованими, які відкриті до підстеляючої гірської породи і в яких носій можна демонтувати разом з сенсорною головкою. Додатково до цього, в пристрої згідно з винаходом, використовують сенсорну головку, здатну притискатися притискним засобом до граничної поверхні, що підлягає виявленню, і не включену до складу переміщеної виїмкової машини, як у відомих пристроях, але включену нерухомим чином з множиною риштаків, розподілених по довжині конвеєра, внаслідок чого утворюються сенсорні риштаки. Оскільки використовують, по суті, стаціонарні оптичні датчики, які переміщаються, головним чином, при переміщенні конвеєра, тертя, яке діє на оптичне вікно, таке як, зокрема, сапфірове вікно, і будь-яке зношування внаслідок сили тиску на підстеляючу гірську породу, прикладену за допомогою елементів, що притискуються, є по суті меншою, ніж в оптичних датчиках, переміщуваних разом з виїмковою машиною. Додатково до цього, більше не потрібно встановлювати засоби радіозв'язку між переміщуваним оптичним датчиком і механізованим кріпленням і т.п., оскільки передача даних може відбуватися без проблем через кабельні лінії передачі. Для повідомлення достатньої інформації для профілю граничної поверхні між вугіллям і підстеляючою гірською породою, крім оптичних датчиків, розподілених по довжині конвеєра, кожний риштак конвеєра, або, якщо необхідно, також кожний nний риштак, наприклад, кожний п'ятийп'ятнадцятий, переважно приблизно кожний восьмий-десятий риштак конвеєра виконаний як сенсорний риштак. У залежності від довжини індивідуального риштака, відстань між двома оптичними датчиками становить приблизно 1,8-15 м або приблизна 20 м, при цьому, навіть якщо який-небудь оптичний датчик відмовляє, достатня інформація є на сенсорному риштаку для надійного визначення профілю підстеляючої гірської породи по сигналах детектуючих датчиків і для забезпечення ними інформації керування для приведення в дію системи виїмки при проходці. Підземна система виїмки при проходці може приводитися в дію, зокрема, за допомогою широко представлених циліндрів виконавчих механізмів, що адаптують верхнє положення виїмкової машини до рівня підстеляючої гірської породи, що змінився, і таким чином направляють лінію різання виїмкової машини по фактичному профілю підстеляючої гірської породи. Вищезазначена задача також досягається, зокрема, відповідними риштаками, які виконані як сенсорні риштаки і мають захищене гніздо, відкрите до підстеляючої гірської породи для розміщення з можливістю демонтажу носія «оптичного датчика, здатного притискатися до граничної поверхні щонайменше одним притискним засобом для виявлення граничної поверхні між вугіллям і підстеляючою гірською породою. У найбільш переважному варіанті здійснення винаходу, носій датчика розташований в гнізді, виконаному поблизу бічних профілів з боку фронту очисного забою верхньої гілки і нижньої гілки конвеєра. Носій датчика при цьому має невелику відстань від фронту очисного 95524 8 забою, яка відповідає приблизно необхідній глибині напрямного пристрою машини для напрямлення виїмкової машини, що несе різальні інструменти. Вказана відстань, спеціально вибирана у винаході, визначальне положення детектуючого датчика від опорної поверхні напрямного пристрою машини, значно збільшує простір, що є для гнізда, внаслідок чого одержують можливість використання оптичних детектуючих датчиків зі значно більш високою стійкістю до зношування і одночасно оснащених притискним засобом. У одному переважному варіанті здійснення винаходу, гніздо можна виконати в бічній стінці з боку фронту очисного забою секції конвеєра або, ще більш переважно, в з'єднувальній стінці із завальної сторони напрямної секції. Розташування гнізда і, таким чином, також носія датчика, що включає в себе сенсорну головку, в з'єднувальній стінці напрямної секції можна реалізувати особливо просто, якщо напрямна секція містить литу частину, що має вбудовану з'єднувальну стінку відповідної міцної конфігурації. Переважне використання пристрою згідно з винаходом або риштака згідно з винаходом в стругових системах, в яких напрямний пристрій машини виконаний як напрямний пристрій струга, що має канали ланцюга для стрічково-ланцюгового конвеєра для виїмкового струга і має відстежуюче пристосування машини для виїмкового струга, при цьому в найбільш переважному варіанті здійснення винаходу гніздо розташоване на завальній стороні каналів ланцюга. Встановлення оптичних детектуючих датчиків на завальній стороні каналів ланцюга значно спрощує техобслуговування в порівнянні з рішеннями, відомими в попередньому рівні техніки, оскільки оптичні детектуючі датчики можна розбирати або встановлювати без вимушеного розбирання відстежуючого пристосування машини або без проходу гірника перед фронтом корпусу струга. Особливо переважно для техобслуговування і можливого необхідного встановлення або демонтажу, якщо гніздо проходить в секції конвеєра або напрямній секції зверху донизу і встановлення/демонтаж носія датчика зроблене можливим з верхньої гілки конвеєра. У одному переважному варіанті здійснення винаходу гніздо може мати циліндричний переріз і/або носій датчика може бути виконаний переважно як циліндрична корпусна деталь, яку можна вставляти в гніздо, у внутрішньому об'ємі якого розташований притискний засіб і сенсорна головка встановлена так, що може зміщатися притискним засобом. Оскільки є достатня загальна висота бічної стінки або з'єднувальної стінки між конвеєром і напрямним пристроєм машини, носії датчика можна по суті використовувати, як описано в патенті Німеччини 19925949 A1, включеного в даний опис шляхом посилання. У відповідному варіанті здійснення винаходу отвір монтажу/демонтажу гнізда для розміщення носія датчика можна герметично закривати, зокрема, за допомогою бічної профільної деталі з можливістю демонтажу для бічного профілю верхньої гілки конвеєра з боку фронту очисного забою. Бічну профільну деталь, що має 9 незначну повну довжину, можна відносно просто закріпити, як деталь перемички, до риштака або аналогічно за допомогою болтових з'єднань. У альтернативному варіанті здійснення винаходу носій датчика можна розташувати в гнізді з відкритою кромкою на нижній поверхні напрямної або риштака так, щоб він міг зміщатися відносно напрямної секції конвеєра або риштака щонайменше одним притискним засобом. У даному варіанті здійснення винаходу сенсорна головка більше не переміщається відносно носія датчика притискним засобом, але замість цього використовується носій датчика зносостійкої конфігурації, в який вбудована нерухомо закріплена сенсорна головка, при цьому носій датчика розташований рухомо в гнізді разом з сенсорною головкою для притискання сенсорної головки в носії датчика до граничної поверхні, що підлягає виявленню, незалежно від профілю підстеляючої гірської породи. Гніздо для носія датчика такого типу можна виконати, зокрема, в захищеній зоні завальної сторони з'єднувальної стінки секції напрямного пристрою машини, переважно виконаній у вигляді литої деталі. Відповідна секція напрямного пристрою машини може мати, зокрема, з'єднувальну стінку, яка створює щонайменше частково профільний кінець для скребків в нижній гілці конвеєра і може мати точку зварювання для платформи нижньої гілки конвеєра, при цьому гніздо для детектуючого датчика розташоване під платформою нижньої гілки конвеєра на завальній стороні з'єднувальної стінки. Відповідні риштаки можуть мати опорне ребро, розташоване, зокрема, під платформою нижньої гілки конвеєра, на яке встановлюється з можливістю зміщення носій датчика. У той же самий час, опорне ребро може утворювати поперечний щит для переміщуваного носія датчика, зокрема, якщо носій датчика розташований між двома опорними ребрами. Електронна схема датчика для перетворення оптоелектронного сигналу може бути розташована безпосередньо в гнізді. Альтернативно, електронна схема датчика може бути розташована на бічній стінці завальної сторони риштаків, при цьому найбільш переважним є використання оптичного з'єднувального кабелю, такого як, зокрема, оптичний хвилевод або джгут оптичних хвилеводів, прокладений в проміжному днищі між верхньою гілкою і нижньою гілкою конвеєра. Якщо носій датчика одночасно обладнаний електронною схемою датчика і розташований разом з останньою в гнізді, електричний з'єднувальний кабель може бути альтернативно прокладений в проміжному днищі між верхньою гілкою і нижньою гілкою конвеєра для забезпечення подачі електроживлення і подачі сигналів між контролером виїмки або довгого очисного забою і оптичними детектуючими датчиками. Найбільш переважно у всіх варіантах здійснення використовувати притискний засіб, що містить щонайменше одну пружину. У носії датчика, виконаному, як циліндрична корпусна деталь, пружина може бути встановлена в частині кожуха і може створювати тиск на сенсорну головку відносно кожуха в напрямі граничної поверхні, що підлягає виявленню. У носії датчика, який можна пе 95524 10 реміщувати в гнізді, переважне використання деякої кількості пружин стиснення. Оптичне вікном, зокрема сапфірове вікно, переважно з'єднане попереду сенсорної головки. Оскільки система виїмки загалом при проходці переміщається на глибину різання після кожного проходу виїмкової машини, сенсорна головка або, зокрема, оптичне вікно, забезпечене запобіжною планкою. Дана запобіжна планка може бути виконана, зокрема, у вигляді V-подібної запобіжної планки, вершина якої направлена у бік переміщення, в результаті навіть Гірська порода, розташована навколо, не може пошкодити оптичне вікно під час операції переміщення. Для забезпечення після кожної операції переміщення виявлення граничної поверхні без порушення відбивної здатності, пневматичний засіб, зокрема засіб подачі стисненого повітря може бути встановлений, згідно з більш переважним варіантом здійснення винаходу, для очищення оптичних вікон в сенсорних риштаках. Пневматичний засіб може відкриватися, наприклад, в сопло, яким забезпечене оптичне вікно, і обдувати оптичне вікно, очищаючи його під час операції переміщення. Як альтернатива або в доповнення, механічний підіймальний засіб, протидіючий силі тиску притискного засобу, може бути обладнаний для підйому, якщо необхідно, сенсорної головки або носія датчика. При цьому підіймальний засіб може, також переважно мати пневмопривід, щоб, наприклад, під час операції переміщення, як додаткова міра захисту для сенсорної головки, утискувати останню або носій датчика в гніздо, і допускати випуск на граничну поверхню притискним засобом тільки після закінчення операції переміщення. Разом з тим, підіймальний засіб може також мати електромагнітне керування. Додаткові переваги і удосконалення винаходу виходять з опису варіантів здійснення, що є прикладами, схематично показаними на наступних кресленнях. На Фіг.1 схематично показана в перерізі через фронт забою виїмки, стругова система згідно з винаходом, яка має сенсорний риштак і контролер для встановлення лінії різання струга. На Фіг.2 показаний вертикальний переріз через кінець з боку фронту очисного забою сенсорного риштака згідно з першим варіантом здійснення винаходу. На Фіг.3 показаний вертикальний переріз через кінець з боку фронту очисного забою сенсорна риштака згідно з другим варіантом здійснення. На Фіг.4 показаний детальний вигляд вузла IV Фіг.3. Стругова система, схематично показана на Фіг.1, базова конструкція якої відома, містить забойний конвеєр 1, розташований перед фронтом вугільного забою (не показаний), здатний переміщатися у верхньому напрямі і виконаний в формі броньованого гнучкого конвеєра. Тільки один риштак 1’ конвеєра показаний на Фіг.1. Вугільний струг 3, який вантажить вугілля, здобуте на фронті очисного забою в режимі відкритого гірського вироблення в забойний конвеєр 1, спрямований на конвеєрі 1, як виїмкова машина. Відповідним чином здобуте вугілля можна транспортувати за допомо 11 гою забойного конвеєра 1. Вугільний струг 3 жорстко спрямований на напрямному пристрої струга або напрямному пристрої машини, який встановлений у вигляді напрямної секції 4 з боку фронту очисного забою на секції 2 риштака конвеєра кожного риштака 1’ забойного конвеєра 1. Переміщення вперед і назад вугільного струга 3 здійснюється за допомогою ланцюга струга, розташованого в каналах 5, 6 ланцюга в напрямній секції 4, що створює напрямний пристрій машини, причому, вугільний струг 3 з'єднаний з ланцюгом струга в нижньому каналі 6 ланцюга, як відомо фахівцеві в галузі гірської проходки. Для регулювання горизонту або рівня стругової системи, що містить забойний конвеєр 1, вугільний струг 3 і напрямний пристрій струга, кожний риштак 1’ конвеєра 1 або кожний другий риштак 1’ конвеєра 1 обладнаний гідравлічним циліндром 7 виконавчого механізму, розташованим похило до підстеляючої гірської породи і встановленим одним кінцем на насадку 8 просувної балки 9 механізму просування і іншим кінцем на шарнірну головку 11 на риштаку 1’. Просувна балка 9 розташована між нижньою опорною платформою 12 несучої рами 10 щитового кріплення, з допомогою якою фронт очисного забою зберігається відкритим і забезпечується можливість автоматичного переміщення виїмкової системи. Лінію різання вугільного струга 3, що створює виїмкову машину, можна регулювати висуненням або втягуванням циліндра 7 виконавчого механізму з встановленням лінії різання в оптимальному варіанті таким чином, щоб нижні ножі 14 вугільного струга 3 різали відносно точно на граничному шарі між підстеляючою гірською породою, що не підлягає витяганню і вугіллям, що підлягає добування. На Фіг.1, схематично показаний оптичний детектуючий датчик 20, розташований в гнізді в з'єднувальній стінці напрямної секції 4 на завальній стороні каналів 5, 6 ланцюга, за допомогою якого можна виявляти граничну поверхню між підстеляючою гірською породою і вугіллям на нижній стороні напрямної секції 4. Кожний риштак або кожна секція напрямного пристрою машини, розташований по довжині виїмкової системи, можуть бути обладнані відповідним оптичним детектуючим датчиком 20. Разом з тим, якщо необхідно, може вистачати забезпечувати не кожний риштак або не кожну секцію напрямного пристрою машини відповідним оптичним детектуючим датчиком 20, але замість цього виконувати тільки приблизно кожний п'ятий-десятий риштак, у вигляді сенсорного риштака 50, що має вбудований або зв'язаний з ним оптичний детектуючий датчик 20. Дані вимірювань, що виконуються оптичними датчиками 20, перетворені в електричні сигнали перетворювачами (не показано), можна передавати за допомогою оптичних хвилеводів і електричних кабелів на електронний блок оцінки і керування (не показано), на блок керування виїмкою зв'язаного щитового кріплення 10 або на центральний контролер для вироблення сигналів керування для керуючих циліндрів 7 по сигналах вимірювань, внаслідок чого лінію різання вугільного струга 3 можна адаптувати до граничної поверхні між підстеляючою гірсь 95524 12 кою породою і вугіллям. Оскільки профіль вугільного пропластка в більшості випадків різко не змінюється, виявлення граничної поверхні між підстеляючою гірською породою і вугіллям і підтриманням рівня лінії різання можна виконувати досить близько до режиму реального часу за допомогою оптичних детектуючих датчиків 20, розташованих віднесеними від фронту очисного забою приблизно на ширину напрямного пристрою машини (напрямної секції 4). На Фіг.2, детально показаний кінець риштака 2 конвеєра, що знаходиться на стороні фронту очисного забою з прикріпленою секцією 4 напрямного пристрою машини, що має вертикально орієнтоване гніздо 21 для розміщення оптичного детектуючого датчика 20. У показаному варіанті здійснення винаходу секція 4 напрямного пристрою машини по суті містить корпус, виконаний як лита частина з вбудованими каналами 5,6 напрямку ланцюга, виконаного як єдине ціле з відстежуючою деталлю 15, захист 16 напрямного пристрою для ланцюгового блоку, виступаючий в нижній канал 5 ланцюга для з'єднання позаду, і міцну з'єднувальну стінку 17 із завальної сторони, на якій розташовані як приварне вушко 18 для проміжної днища 30, так і приварне вушко 19 для днища 31 нижньої гілки конвеєра, виконані як одне ціле. Проміжне днище 30 відділяє нижню гілку 32 секції 2 конвеєра від верхньої гілки 34 конвеєри, виконаної тут, як ринва 33. Верхній отвір гнізда 21 розташований так, що по суті відкривається під бічним профілем 35, тобто на стороні фронту очисного забою знімної ринви 33, що містить верхню гілку 34 конвеєра. Детектуючий датчик 20 може бути вставлений, як моноблочна замінювана деталь зверху в гніздо 21. Для встановлення/демонтажу знімна ринва 33 повинна бути повністю демонтована або бічний профіль 35, що знаходиться з боку фронту очисного забою, повинен бути виконаний у вигляді декількох деталей і забезпечений середньою деталлю яка може бути з'єднана болтами з покривною планкою 36 і з'єднана болтами з'єднаннями з деталям бічного профілю, розташованими нерухомо закріпленими на знімній ринві 33 або верхній гілці 34 конвеєра. З зв'язку з цим оптичний детектуючий датчик 20 можна розібрати зверху без проблем без необхідності розбирання або підйому відповідного риштака 50 з датчиком з конвеєра. Гніздо 21 відкрите отвором до підстеляючої гірської породи на нижній стороні 23 секції 4 напрямного пристрою машини або, як показано, на нижній стороні 23 опорного ребра 40, привареного на нижній зоні з'єднувальної стінки 17.3ношуваний черевик 23 оптичної сенсорної головки 24 детектуючого датчика 20 виступає через отвір. Зношуваний черевик 23 головки 24 датчика обладнаний по центру оптичним вікном (сапфіровим вікном) 25, через яке може реєструватися відбивна здатність підстеляючої гірської породи, на яку спирається виїмкова система за допомогою опорного ребра 40 і відстежуючого пристосування 15. У даному варіанті сенсорна головка 24 є підпружиненою за допомогою пружини 26 стиснення в напрямі до підстеляючої гірської породи для забезпечення опору оптичного вікна 25 на підстеляючу гірську породу якщо, на 13 приклад, нижня сторона 43 опорного ребра 40 має невелику відстань від підстеляючої гірської породи, як вказана двома штрихпунктирними лініями на Фіг.2. У даному варіанті головка 24 датчика і пружина 26 стиснення розташовані в циліндричній корпусній деталі 27, вставленій зверху у відповідне циліндричне гніздо 21 і закріпленій, наприклад, на уступі гнізда 21. У варіанті здійснення, показник на Фіг.2, оптичні сигнали сенсорної головки 24 подаються через оптичний хвилевод 45 на оптоелектричний перетворювач (не показано), який при необхідності виконаний у вигляді джгута оптичних хвилеводів, прокладених захищеним чином в проміжному днищі ЗО між нижньою гілкою 32 і верхньою гілкою 34 конвеєра або змінною ринвою 33. Електронна схема оптоелектричного перетворювача або датчика може також бути виконана у вигляді інтегральної складової частини оптичного датчика 20 в гнізді 21 або у відносно великому зазорі 28 над гніздом 21 для передачі виключно електричних сигналів між позицією детектуючого датчика 20 і віддалено розташованої оцінної електронної схеми або т.п. Подача електроживлення для всіх компонентів, необхідних оптичним датчиком 20, може бути при цьому реалізована легко за допомогою з'єднувальних кабелів. На Фіг.2 показане положення сенсорної головки 24 оптичного детектуючого датчика 20, в якому оптичне вікно 25 виступає до низу за межі нижньої поверхні 43. Абсолютно очевидно, що оптичне вікно 25 закінчується урівень з нижньою поверхнею 43, в зв'язку з можливістю переміщення, що забезпечується пружиною 26 стиснення, якщо нижня поверхня 43 опорного ребра 40 площиною спирається на підстеляючу гірську породу. На Фіг.3 і 4 показаний другий варіант здійснення сенсорного риштака 160, що має захищене гніздо 121 з розташованим в ньому оптичним датчиком 120. Риштак 150 містить риштак 102 конвеєра з секцією 104 напрямного пристрою, прикріпленою з боку фронту очисного забою і виконаною, по суті у вигляді литої деталі з вбудованим відстежуючим пристосуванням 115 литої машини, інтегрально виконаними каналами 105, 106 ланцюга і міцною з'єднувальною стінкою 117, яка лежить на завальній стороні каналів 105, 106 ланцюга. Верхня гілка 134 конвеєра в свою чергу виконана як знімна ринва 133, що спирається на проміжне днище 130, приварене до з'єднувальної стінки 117. Кінець днища 131 нижньої гілки, що знаходиться з боку фронту очисного забою, також приварений до з'єднувальної стінки 117, яка частково утворить поперечну напрямну скребків на нижній гілці 132 конвеєра, кінець якої, як в попередньому варіанті здійснення винаходу, має нахилені вгору назовні кутові кромки, для виконання напряму очищення скребків можливим на нижній гілці 132 конвеєра. Поблизу кінця, тобто, на стороні фронту очисного забою, днище 131 нижньої гілки конвеєра обладнане частково вирізом 160, закритим за допомогою деталі 161 днища нижньої гілки конвеєра, для забезпечення виконання робіт техобслуговування, коли верхня ринва 133 і деталь 161 днища нижньої гілки конвеєра видаляють, на оптичному датчику 95524 14 120, розташованому в гнізді 121, що проходить на завальній стороні з'єднувальної стінки 117 з конфігурацією, утворюючою єдине ціле з відстежуючим пристосуванням 115 машини і під днищем 131 нижньої гілки конвеєра. Гніздо 121 також відкрите знизу, але захищене в напрямі переміщення або верхньому напрямі риштаків 150 з датчиком, відстежуючим пристосуванням 115 машини, і відповідною розширеною секцією з'єднувальної стінки 117. У свою чергу, опорні ребра можуть бути приварені до з'єднувальної стінки 117, поперечно по відношенню до гнізда 121, як показано для прикладу з опорними ребрами 140 на Фіг.4. У оптичному детектуючому датчику 120 сенсорна головка 124 з оптичним вікном 125 нерухомо встановлена в носії 127 датчика, який виконаний, як міцний зношуваний черевик, і здатний зміщатися відносно з'єднувальної стінки 117 і днища 131 нижньої гілки конвеєра. Для цієї мети носій 127 датчика має, в поперечному напрямі, вертикально зорієнтований напрямний виріз 170, через який проходять з'єднувальні пальці 171, закріплені, наприклад, в опорному ребрі 140. Декілька пружин 126 стиснення, що спираються для цієї мети на нижню сторону днища 131 нижньої гілки конвеєра, переважно створюють тиск на верхню або задню сторону 129 носія 127 датчика. Носій 127 датчика, разом з сенсорною головкою 124, розташованою захищеним чином в носії 127 датчика, зміщаються під дією пружини 126 стиснення, якщо нижню поверхню відстежуючого пристосування 115 машини або V-подібну запобіжну планку 180, прикріплену до неї і направлену вершиною у верхньому напрямі, потрібно рознести з підстеляючою гірською породою, і надійно притискається до підстеляючої гірської породи, щоб оптична система в детектуючому датчику 120 могла вимірювати відбивну здатність підстеляючої гірської породи або вугілля і подавати сигнали вимірювання на блок керування. Оскільки є відносно велика величина зазору, зокрема, в зоні за з'єднувальною стінкою 117 і під днищем 131 нижньої гілки конвеєра, всю електронну схему датчика, що включає в себе оптоелектричний перетворювач, можна при необхідності розташувати в даному гнізді 121. При цьому, досить прокласти з'єднувальний кабель вздовж нижньої сторони днища нижньої гілки конвеєра або знову через проміжне днище 130 до завальної сторони і звідти, наприклад, до електронних блоків керування індивідуальним щитовим кріпленням виїмкової машини. На фігурах не показано, що засіб подачі пневмосистеми або засіб подачі стисненого повітря, що має насадку, може бути підведений в кожному варіанті до гнізд в сенсорних риштаках для очищення оптичного вікна в сенсорній головці обдуванням стисненим повітрям, якщо необхідно, під час операції переміщення, якщо риштак датчика на короткий час підіймається від підстеляючої гірської породи. Додатково до цього, не показано, що підіймальний пристрій також може приводитися в дію, зокрема, через той же засіб подачі речовини під тиском, при цьому, підіймальний пристрій підіймає сенсорну головку або носій датчика, проти напряму сили пружин стиснення, в результаті не 15 може відбуватися пошкодження або зношування оптичного вікна навіть під час операції переміщення від підстеляючої гірської породи, лежачої навколо нього. Підіймальний засіб можна навіть використовувати для короткочасного підйому носія датчика або сенсорної головки під час верхньої операції, коли риштак датчика спирається на підстеляючу гірську породу, для очищення сапфірового вікна або оптичного вікна стисненим повітрям в даному положенні. Винахід не обмежений показаними варіантами здійснення. Зокрема, для конструкції напрямного 95524 16 пристрою машини, що включає в себе конструкцію з'єднувальної стінки, внаслідок численних модифікацій, як відомо фахівцеві в галузі підземної проходки для різних зразків напрямних пристроїв машини, корпусів струга, геометрії ланцюга, і т.п. В залежності від довжини окремих риштаків і, як функція необхідної інформаційної щільності, кожний риштак або тільки кожний n-ний риштак може бути виконаний як риштак з датчиком. Рознесення між двома конвеєрними риштаками, виконаними, як риштаки з датчиками, може також бути різним. 17 Комп’ютерна верстка А. Рябко 95524 Підписне 18 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining the cutting horizon of a mining winning system and a pan for it
Автори англійськоюKlabisch, Adam, Hesse, Norbert, Duhnke, Klaus, Bettermann, Diedrich, Siepenkort, Gerhard
Назва патенту російськоюУстройство для определения линии резки системы выемки при проходке и рештак для нее
Автори російськоюКлабиш Адам, Хессе Норберт, Дунке Клаус, Беттерманн Дитрих, Зипенкорт Герхард
МПК / Мітки
МПК: E21C 35/24, E21C 35/12, E21C 27/34
Мітки: виїмки, пристрій, визначення, системі, лінії, неї, різання, проходці, риштак
Код посилання
<a href="https://ua.patents.su/9-95524-pristrijj-dlya-viznachennya-lini-rizannya-sistemi-vimki-pri-prokhodci-i-rishtak-dlya-ne.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення лінії різання системи виїмки при проходці і риштак для неї</a>
Оглядовий риштак скребкового конвеєра
Номер патенту: 83278
Опубліковано: 25.06.2008
Автори: Леусенко Анатолій Васильович, Бабенко Микола Павлович, Висоцький Генадій Васильович
МПК: B65G 19/28
Мітки: скребкового, конвеєра, оглядовий, риштак
Формула / Реферат:
1. Оглядовий риштак шахтного скребкового конвеєра складається з прокатних чи литих боковин риштака, зварених між собою верхнім і нижнім листами, який відрізняється тим, що верхнє днище риштака виконано з двох частин у вигляді листів, між якими по середині риштака утворено отвір оглядового вікна, який закривається плоскою кришкою-шибером, з одного торця до якої приварені дві циліндричні втулки з прорізями по осях, а знизу листа кришки-шибера...
Риштак скребкового конвеєра
Номер патенту: 1549
Опубліковано: 16.12.2002
Автори: Косарев Іван Васильович, Літвінов Георгій Олексійович, Лаптєв Анатолій Григорович, Сошенко Ігор Микитович, Лелека Ігор Тимофійович, Косарев Василь Васильович, Сохацький Володимир Олексійович, Андрєєв Георгій Володимирович
МПК: E21C 35/12, B65G 19/00
Мітки: риштак, скребкового, конвеєра
Формула / Реферат:
Риштак скребкового конвеєра, що містить знімний люк з його запірними пристроями, який відрізняється тим, що кожний запірний пристрій виконаний у вигляді зігнутої пружинної планки, встановленої своїми кінцями в пази, утворені двома скобами, одна з яких приварена до верхньої завальної боковини риштака, а друга - до верхньої полички завальної боковини люка.
Інспекційний риштак шахтного скребкового конвеєра
Номер патенту: 75717
Опубліковано: 15.05.2006
Автори: Висоцький Генадій Васильович, Поволоцький Володимир Миколайович, Леусенко Анатолій Васильович, Бабенко Микола Павлович
МПК: B65G 19/28
Мітки: скребкового, конвеєра, шахтного, інспекційний, риштак
Формула / Реферат:
1. Інспекційний риштак шахтного скребкового конвеєра, який має з`єднані верхнім і нижнім днищами дві профільні боковини, при цьому верхнє днище має оглядове вікно, який відрізняється тим, що одна боковина повернена до забою та виконана із двох частин, між якими розміщується профільний відрізок, ідентичний частинам боковин, при цьому до відрізка профілю приварена напрямна засувка, яка закриває оглядове вікно, передня грань засувки виконана з...
Риштак скребкового конвеєра

Номер патенту: 4898
Опубліковано: 15.02.2005
Автори: Вайнштейн Аркадій Леонідович, Коган Костянтин Копелович, Левін Олександр Михайлович
МПК: B65G 19/28
Мітки: скребкового, конвеєра, риштак
Формула / Реферат:
1. Риштак скребкового конвеєра, що включає фасонні боковини і днище, на верхній поверхні якого розташовані поздовжніми рядами зносостійкі елементи, який відрізняється тим, що зносостійкі елементи днища виконані у вигляді штаб на всю довжину днища, а на внутрішніх поверхнях вертикальних стінок і нижніх полиць фасонних боковин також виконані зносостійкі поздовжні штаби на всю довжину боковин.2. Риштак за п. 1, який відрізняється тим, що...
Спосіб визначення технічного стану устаткування крутильної системи лінії головного приводу прокатної кліті
Номер патенту: 70137
Опубліковано: 15.09.2004
Автори: Юнаков Олександр Михайлович, Путнокі Олександр Юліусович, Далічук Анатолій Пантелійович, Вереньов Валентин Володимирович, Мацко Сергій Володимирович, Будаква Сергій Анатолійович, Борщов Олексій Вікторович
МПК: G01M 7/02
Мітки: спосіб, прокатної, крутильної, стану, головного, системі, кліті, технічного, визначення, приводу, лінії, устаткування
Формула / Реферат:
Спосіб визначення технічного стану устаткування крутильної системи лінії головного приводу прокатної кліті, за яким періодично вимірюють, щонайменше у двох точках лінії приводу, значущий вібропараметр, зв'язаний з технічним станом лінії приводу, який відрізняється тим, що вимірювання здійснюють у період захоплення заготівки валками, при цьому визначають час запізнювання реакції ділянок лінії приводу на ударне навантаження, що діє на валки і...
Попередній патент: Флакон для препаратів
Наступний патент: Занурена хвильова електростанція осадчука о.в., савченка в.а.
Випадковий патент: Спосіб електротерапії