B60W 30/10 — підтримку курсу
Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом
Номер патенту: 106079
Опубліковано: 11.04.2016
Автори: Гурко Олександр Геннадійович, Плахтєєв Анатолій Павлович
МПК: B60W 30/10
Мітки: роботизованих, система, встановленим, засобів, робокарів, автоматичного, керування, рухом, маршрутом, транспортних
Формула / Реферат:
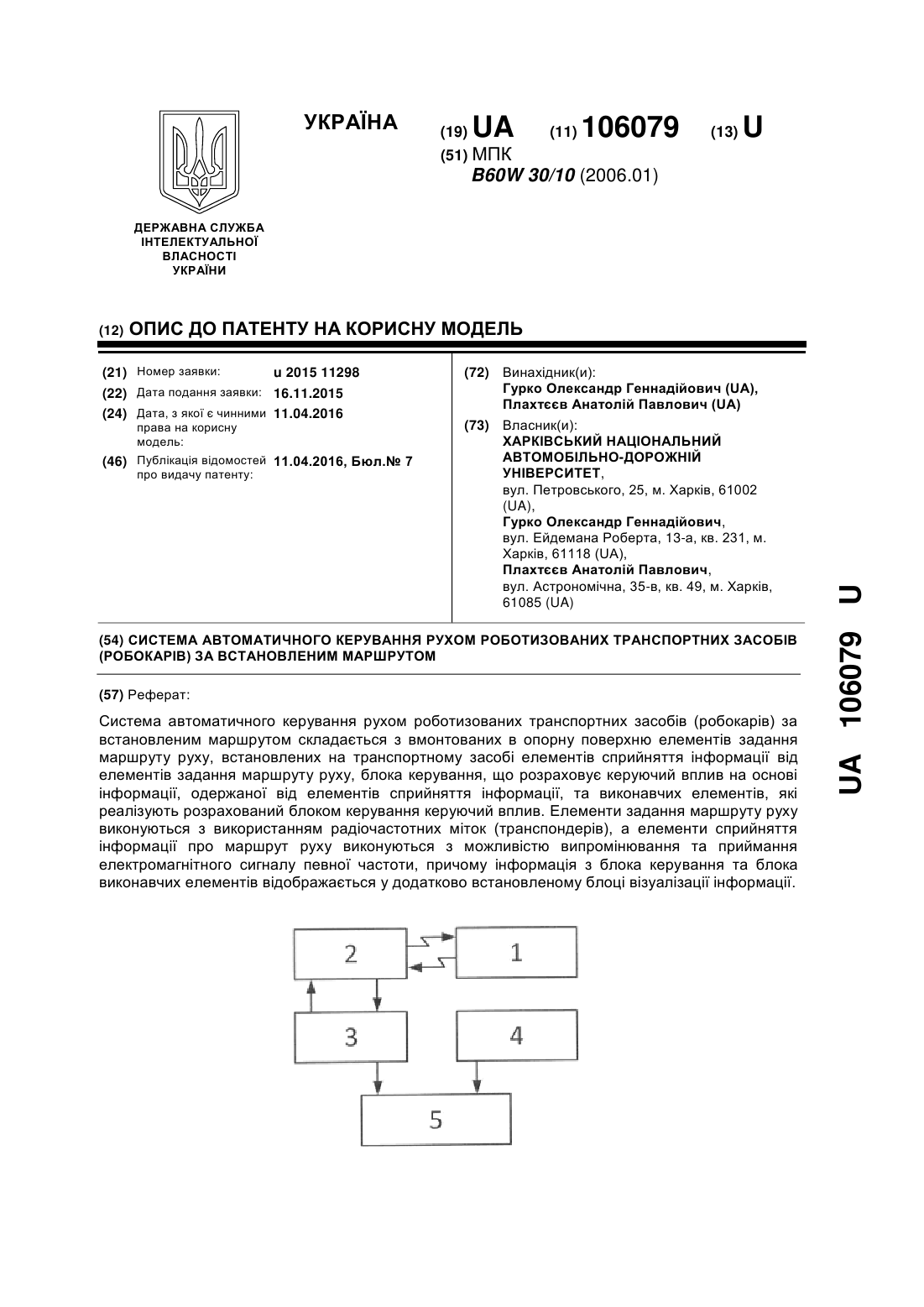
Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом, що складається з вмонтованих в опорну поверхню елементів задання маршруту руху, встановлених на транспортному засобі елементів сприйняття інформації від елементів задання маршруту руху, блока керування, що розраховує керуючий вплив на основі інформації, одержаної від елементів сприйняття інформації, та виконавчих елементів, які...
Спосіб виконання першого проходу мобільного сільськогосподарського агрегату
Номер патенту: 100649
Опубліковано: 10.08.2015
Автор: Малюта Сергій Іванович
МПК: B60W 30/10
Мітки: проходу, сільськогосподарського, мобільного, спосіб, виконання, першого, агрегату
Формула / Реферат:
1. Спосіб виконання першого проходу мобільного сільськогосподарського агрегату, що полягає в огляді поля, виборі способів руху агрегату, розмічуванні поворотних смуг, розбиванні поля на загінки, провішуванні лінії першого проходу за допомогою вішок, який відрізняється тим, що перед початком руху агрегат встановлюють біля вішки, встановленої на початку гону, а після початку руху перший прохід здійснюють, ведучи агрегат, орієнтуючись на вішку,...
Спосіб і пристрій для візуалізації переміщень машин
Номер патенту: 96730
Опубліковано: 12.12.2011
Автори: Меєр цу Хелліген Ларс Петер, Бруннерт Андреас, Дікханс Норберт, Нінабер Герхард
МПК: G05D 1/02, B60W 30/10, A01B 69/00, A01D 41/12 ...
Мітки: машин, спосіб, переміщень, пристрій, візуалізації
Формула / Реферат:
1. Спосіб візуалізації переміщення машини, причому машина містить щонайменше один сполучений з керуючим обчислювальним пристроєм індикаторний пристрій, а керуючий обчислювальний пристрій з'єднаний щонайменше з однією системою ведення машини в колії для водіння її по маршрутах і містить щонайменше один характеристичний стабілізаційний параметр машини, що описує її стабілізацію, який відрізняється тим, що керуючий обчислювальний пристрій (12)...