Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом
Номер патенту: 106079
Опубліковано: 11.04.2016
Автори: Гурко Олександр Геннадійович, Плахтєєв Анатолій Павлович

Формула / Реферат
Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом, що складається з вмонтованих в опорну поверхню елементів задання маршруту руху, встановлених на транспортному засобі елементів сприйняття інформації від елементів задання маршруту руху, блока керування, що розраховує керуючий вплив на основі інформації, одержаної від елементів сприйняття інформації, та виконавчих елементів, які реалізують розрахований блоком керування керуючий вплив, яка відрізняється тим, що елементи задання маршруту руху виконуються з використанням радіочастотних міток (транспондерів), а елементи сприйняття інформації про маршрут руху виконуються з можливістю випромінювання та приймання електромагнітного сигналу певної частоти, причому інформація з блока керування та блока виконавчих елементів відображається у додатково встановленому блоці візуалізації інформації.
Текст
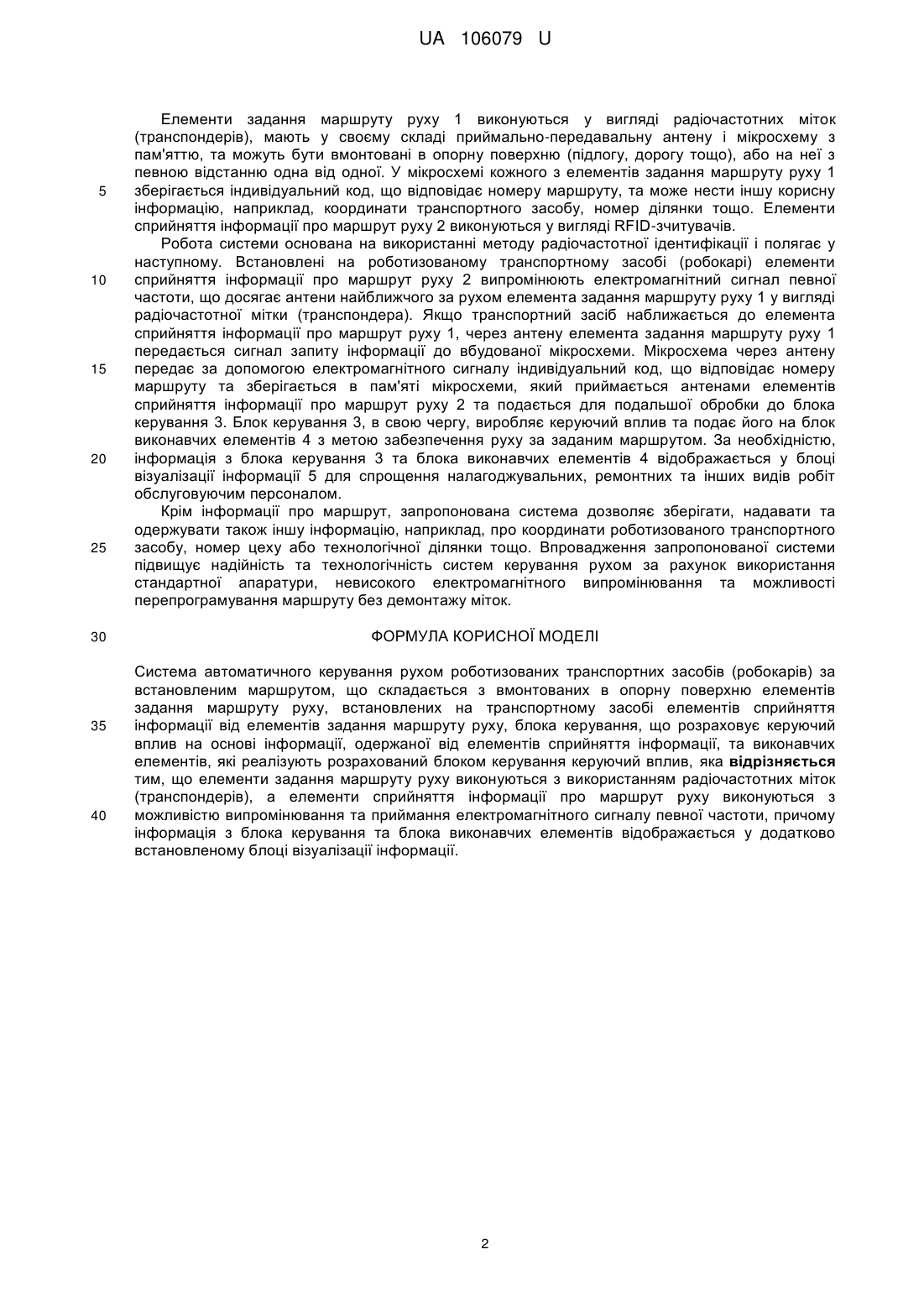
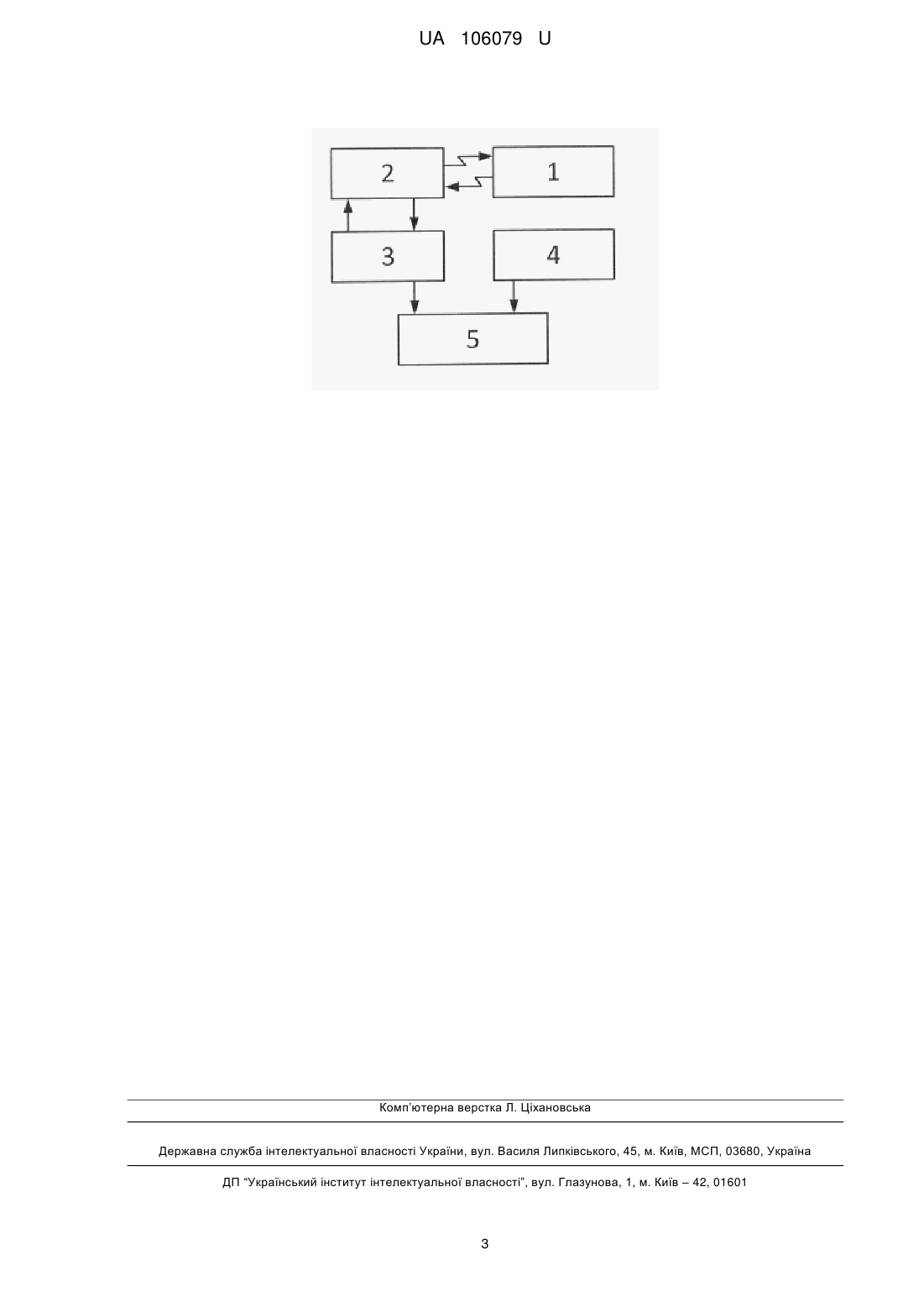
Реферат: Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом складається з вмонтованих в опорну поверхню елементів задання маршруту руху, встановлених на транспортному засобі елементів сприйняття інформації від елементів задання маршруту руху, блока керування, що розраховує керуючий вплив на основі інформації, одержаної від елементів сприйняття інформації, та виконавчих елементів, які реалізують розрахований блоком керування керуючий вплив. Елементи задання маршруту руху виконуються з використанням радіочастотних міток (транспондерів), а елементи сприйняття інформації про маршрут руху виконуються з можливістю випромінювання та приймання електромагнітного сигналу певної частоти, причому інформація з блока керування та блока виконавчих елементів відображається у додатково встановленому блоці візуалізації інформації. UA 106079 U (12) UA 106079 U UA 106079 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до наземних транспортних засобів, переважно до тих, що рухаються за заздалегідь встановленим маршрутом. Для автоматизації транспортних операцій у виробництві, складських приміщеннях, вантажних терміналах, в аеропортах тощо широко використовуються автономні мобільні транспортні засоби (робокари). У більшості випадків робокари рухаються у межах заздалегідь визначеної траси, яка встановлюється у відповідності до технологічного маршруту. Для забезпечення руху робокара за цією трасою використовуються різноманітні системи стеження. Найбільш простими є рейки та шини або пази, що монтуються на опорну поверхню вздовж визначеної траси. У останньому випадку робокар оснащений напрямним роликом, що переміщується по шині або пазу. При відхиленні робокара від траси руху ролик через механічні або електромеханічні передачі діє на колеса (Шурков В.Н. Основы автоматизации производства и промышленные роботы: Учеб. пособие для машиностроит. Техникумов / В.Н. Шурков. - М.: Машиностроение, 1989. - 240 с.). Проте такі системи незручні в експлуатації та створюють перешкоди працівникам. Широко розповсюдженими є оптичні та індуктивні системи керування, що складаються з елементів задання маршруту руху (маркерів траси), елементів сприйняття інформації від елементів задання маршруту, блока керування та виконавчих елементів. При використанні оптичних систем, задання маршруту руху здійснюється за допомогою контрастної полоси, яка виділяється на тлі основного покриття. Є варіанти, коли використовують полоси, що не сприймаються зором людини, наприклад, ультрафіолетові (Siegwart R. Introduction to Autonomous Mobile Robots / R. Siegwart, I.R. Nourbakhsh. - London: The MIT Press, 2004. - 320 p.). Використовують також світові маячки, що розташовуються у визначеній послідовності вздовж маршруту. Для сприйняття інформації використовуються фото датчики, які реєструють оптичний сигнал, перетворюють його у електричний та подають на блок керування. Недоліком таких систем є можливість нестабільного подання інформації про маршрут завдяки стиранню або забрудненню оптичних елементів задання маршруту. Відома індуктивна система, яка складається з розміщеного під опорною поверхнею (підлогою, дорогою тощо) індуктивного кабелю, по якому проходить змінний струм низької частоти, що утворює концентричне електромагнітне поле, а в якості елементів сприйняття інформації використовуються встановлені на транспортному засобі (робокарі) дві котушки, що реєструють напругу, яка потім подається на блок керування. Останній, для збереження постійності переміщення робокара вздовж кабелю, подає керуючу інформацію на виконавчі елементи (наприклад, двигун), щоб усунути різницю напруг між котушками (Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: учебник для студ. высш. учеб. заведений / М.П. Белов, В.А. Новиков, Л.Н. Рассудов. - 3-е изд., - М.: Издательский центр "Академия". 2007. - 576 с.). Недоліком такої системи є необхідність використання змінного струму нестандартної (низької) частоти, наявність електромагнітних полів, що можуть впливати на роботу іншого обладнання технологічної ділянки, негнучкість з точки зору зміни встановленого маршруту. До того ж, вона неспроможна надавати інформацію про місце розташування робокара, для чого в заданих місцях траси монтується додаткове обладнання, наприклад, електромагніти. Незважаючи на вказані недоліки, розглянута індуктивна система керування рухом транспортних засобів за своєю суттю та технічним виконанням є найбільш близькою до рішення, що пропонується, тому вона обрана в якості найближчого аналогу. В основу корисної моделі поставлена задача удосконалення системи керування рухом роботизованих транспортних засобів (робокарів) за рахунок підвищення технологічності її виконання, інформативності та розширення функціональних можливостей шляхом використання в якості елементів для задання маршруту руху роботизованих транспортних засобів (робокарів) та елементів сприйняття інформації про маршрут руху стандартних засобів радіочастотної ідентифікації (RFID). Поставлена задача досягається тим, що у відомій системі керування рухом роботизованих транспортних засобів (робокарів), що складається з елементів задання маршруту руху (маркерів траси), елементів сприйняття інформації від елементів задання маршруту руху, блока керування та виконавчих елементів, згідно корисної моделі, елементи задання маршруту руху виконуються з використанням радіочастотних міток (транспондерів), а елементи сприйняття інформації про маршрут руху виконуються з можливістю випромінювання та приймання електромагнітного сигналу певної частоти. Роботу системи пояснює креслення, де 1 - елементи задання маршруту руху, 2 елементи сприйняття інформації про маршрут руху, 3 блок керування, 4 - блок виконавчих елементів, 5 блок візуалізації інформації. 1 UA 106079 U 5 10 15 20 25 30 35 40 Елементи задання маршруту руху 1 виконуються у вигляді радіочастотних міток (транспондерів), мають у своєму складі приймально-передавальну антену і мікросхему з пам'яттю, та можуть бути вмонтовані в опорну поверхню (підлогу, дорогу тощо), або на неї з певною відстанню одна від одної. У мікросхемі кожного з елементів задання маршруту руху 1 зберігається індивідуальний код, що відповідає номеру маршруту, та може нести іншу корисну інформацію, наприклад, координати транспортного засобу, номер ділянки тощо. Елементи сприйняття інформації про маршрут руху 2 виконуються у вигляді RFID-зчитувачів. Робота системи основана на використанні методу радіочастотної ідентифікації і полягає у наступному. Встановлені на роботизованому транспортному засобі (робокарі) елементи сприйняття інформації про маршрут руху 2 випромінюють електромагнітний сигнал певної частоти, що досягає антени найближчого за рухом елемента задання маршруту руху 1 у вигляді радіочастотної мітки (транспондера). Якщо транспортний засіб наближається до елемента сприйняття інформації про маршрут руху 1, через антену елемента задання маршруту руху 1 передається сигнал запиту інформації до вбудованої мікросхеми. Мікросхема через антену передає за допомогою електромагнітного сигналу індивідуальний код, що відповідає номеру маршруту та зберігається в пам'яті мікросхеми, який приймається антенами елементів сприйняття інформації про маршрут руху 2 та подається для подальшої обробки до блока керування 3. Блок керування 3, в свою чергу, виробляє керуючий вплив та подає його на блок виконавчих елементів 4 з метою забезпечення руху за заданим маршрутом. За необхідністю, інформація з блока керування 3 та блока виконавчих елементів 4 відображається у блоці візуалізації інформації 5 для спрощення налагоджувальних, ремонтних та інших видів робіт обслуговуючим персоналом. Крім інформації про маршрут, запропонована система дозволяє зберігати, надавати та одержувати також іншу інформацію, наприклад, про координати роботизованого транспортного засобу, номер цеху або технологічної ділянки тощо. Впровадження запропонованої системи підвищує надійність та технологічність систем керування рухом за рахунок використання стандартної апаратури, невисокого електромагнітного випромінювання та можливості перепрограмування маршруту без демонтажу міток. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом, що складається з вмонтованих в опорну поверхню елементів задання маршруту руху, встановлених на транспортному засобі елементів сприйняття інформації від елементів задання маршруту руху, блока керування, що розраховує керуючий вплив на основі інформації, одержаної від елементів сприйняття інформації, та виконавчих елементів, які реалізують розрахований блоком керування керуючий вплив, яка відрізняється тим, що елементи задання маршруту руху виконуються з використанням радіочастотних міток (транспондерів), а елементи сприйняття інформації про маршрут руху виконуються з можливістю випромінювання та приймання електромагнітного сигналу певної частоти, причому інформація з блока керування та блока виконавчих елементів відображається у додатково встановленому блоці візуалізації інформації. 2 UA 106079 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic system for control of robotic vehicle (robocar) movement on given route
Автори англійськоюHurko Oleksandr Hennadiovych, Plakhtieev Anatolii Pavlovych
Назва патенту російськоюСистема автоматического управления движением роботизированных транспортных средств (робокаров) по установленному маршруту
Автори російськоюГурко Александр Геннадьевич, Плахтеев Анатолий Павлович
МПК / Мітки
МПК: B60W 30/10
Мітки: робокарів, роботизованих, маршрутом, система, автоматичного, керування, встановленим, транспортних, рухом, засобів
Код посилання
<a href="https://ua.patents.su/5-106079-sistema-avtomatichnogo-keruvannya-rukhom-robotizovanikh-transportnikh-zasobiv-robokariv-za-vstanovlenim-marshrutom.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного керування рухом роботизованих транспортних засобів (робокарів) за встановленим маршрутом</a>
Дорожня розмітка для автоматичного керування рухом транспортних засобів та спосіб автоматичного керування рухом
Номер патенту: 80389
Опубліковано: 25.09.2007
Автори: Сніцарук Леонід Адамович, Тюлькін Сергій Павлович
МПК: G06G 7/78, G08G 1/00, E01C 9/00
Мітки: керування, спосіб, розмітка, рухом, дорожня, транспортних, автоматичного, засобів
Формула / Реферат:
1. Дорожня розмітка для автоматичного керування рухом транспортного засобу, що складається з ліній, нанесених кольоровим матеріалом на проїзну частину дороги, яка відрізняється тим, що вона містить додаткові лінії дорожньої розмітки, в яких вздовж напрямку руху транспортних засобів за заданим законом чергуються ділянки ліній з високою та низькою електропровідністю з можливістю одержання інформації від індуктивних давачів, встановлених на...
Спосіб дистанційного керування охоронною системою транспортних засобів та охоронна система транспортних засобів
Номер патенту: 86224
Опубліковано: 10.04.2009
Автор: Купрієнко Олександр Михайлович
МПК: G08C 17/00, B60R 25/10, B60R 25/00, G08B 25/10
Мітки: системою, система, охоронна, керування, спосіб, дистанційного, засобів, охоронною, транспортних
Формула / Реферат:
1. Спосіб керування охоронною системою транспортного засобу, при якому команди на керування охоронною системою подають із дистанційного задавального пристрою, який відрізняється тим, що дистанційний задавальний пристрій, при двосторонньому зв'язку з охоронною системою, отримує квитанцію про виконання прийнятої команди, якщо дистанційний задавальний пристрій, в межах установленого часу, не отримав від охоронної системи квитанцію або якщо...
Система автоматичного управління паркуванням транспортних засобів
Номер патенту: 87089
Опубліковано: 27.01.2014
Автори: Дергачов Костянтин Юрійович, Кулік Анатолій Степанович, Хлівнюк Ванда Олександрівна, Харіна Наталія Миколаївна
МПК: G01S 3/02
Мітки: транспортних, система, управління, засобів, паркуванням, автоматичного
Формула / Реферат:
Система автоматичного управління паркуванням транспортних засобів, що містить приймач, приєднаний до рухомого транспортного об'єкта, зв'язаний з глобальною супутниковою системою та керуючим контролером, джерело живлення, вбудований акумулятор, виходи яких з'єднані з підсистемою стабілізації живлення, виходи якої з'єднані з приймачем та керуючим контролером, входи і виходи якого з'єднані з оперативною пам'яттю та енергонезалежним зберігачем...
Система автоматичного регулювання паливоподачі дизель-генераторної установки транспортних засобів
Номер патенту: 62057
Опубліковано: 15.12.2003
Автори: Богаєвський Олександр Борисович, Синельникова Ліля Борисівна, Дубровський Володимир Захарович, Басов Олександр Віталійович
МПК: F02D 29/06
Мітки: дизель-генераторної, автоматичного, установки, регулювання, засобів, паливоподачі, транспортних, система
Формула / Реферат:
Система автоматичного регулювання паливоподачі дизель-генераторної установки транспортних засобів, що включає до свого складу дизель, мікроконтролерний блок керування (МБК), виконавчий механізм управління положенням рейок паливних насосів з датчиком ходу рейок паливних насосів, датчик частоти обертання колінчастого вала дизеля, датчик температури дизеля, датчик тиску наддуву повітря, контролер задання частоти обертання вала дизеля, виходи...
Система керування обслуговуванням транспортних засобів
Номер патенту: 71805
Опубліковано: 25.07.2012
Автор: Чижиков Валерій Олександрович
МПК: B60S 1/00
Мітки: засобів, система, керування, обслуговуванням, транспортних
Формула / Реферат:
1. Система керування обслуговуванням транспортних засобів, що містить послідовно підключені між собою блок визначення наявності транспортного засобу на місці обслуговування, блок збору і обробки інформації та блок оповіщення і моніторингу, причому блок визначення наявності транспортного засобу на місці обслуговування виконаний з можливістю передачі сигналу щодо наявності транспортного засобу у блок збору і обробки інформації, яка...
Попередній патент: Спосіб діагностики психоемоційного стану дитини
Наступний патент: Спосіб розмірної обробки електричною дугою отворів по принципу прошивання
Випадковий патент: Спосіб діагностики хронічного катарального гінгівіту у дітей з захворюваннями щитоподібної залози