Спосіб і пристрій для візуалізації переміщень машин
Номер патенту: 96730
Опубліковано: 12.12.2011
Автори: Дікханс Норберт, Меєр цу Хелліген Ларс Петер, Бруннерт Андреас, Нінабер Герхард

Формула / Реферат
1. Спосіб візуалізації переміщення машини, причому машина містить щонайменше один сполучений з керуючим обчислювальним пристроєм індикаторний пристрій, а керуючий обчислювальний пристрій з'єднаний щонайменше з однією системою ведення машини в колії для водіння її по маршрутах і містить щонайменше один характеристичний стабілізаційний параметр машини, що описує її стабілізацію, який відрізняється тим, що керуючий обчислювальний пристрій (12) визначає та візуально відображує в індикаторному пристрої (14) віртуальну майбутню колію (37) машини (1,2) і/або розрахункову колію (45) машини (1,2), і/або кривизну (43) маршруту (18) з врахуванням щонайменше одного характеристичного стабілізаційного параметра (32) машини (1,2), а віртуальна майбутня колія (37) відображена у вигляді напрямної лінії (38) візуалізованого положення машини (1, 2) у напрямку її переміщення, причому віртуальна майбутня колія (37) характеризується радіусом кривизни (R1), який змінюється залежно від кута повороту (31) або ступеня рискання, а віртуальна майбутня колія (37) і один або декілька маршрутів (18) системи (48) водіння в колії візуально відображаються в одній загальній індикації.
2. Спосіб за п. 1, який відрізняється тим, що один або декілька характеристичних стабілізаційних параметрів (32) машини (1, 2) включають відстань (33) між осями ходової частини або мінімальне коло повороту (34) машини (1, 2) і миттєвий кут повороту (31).
3. Спосіб за п. 1, який відрізняється тим, що один або декілька характеристичних стабілізаційних параметрів (32) машини (1, 2) включають відстань (33) між осями ходової частини або мінімальне коло повороту (34) машини (1, 2), а також поєднання ступеня рискання та швидкості (vG) машини (1, 2).
4. Спосіб за будь-яким з пп. 1-3, який відрізняється тим, що характеристичними стабілізаційними параметрами (32) можуть бути також стабілізація (35) машини (1, 2) і стабілізація (36) відпрацьовуваних маршрутів (18).
5. Спосіб за п. 1, який відрізняється тим, що візуалізовану віртуальну колію (37) постійно визначають та індукують.
6. Спосіб за будь-яким з пп. 1-5, який відрізняється тим, що відпрацьовуваний машиною (1,2) маршрут (18) поділяється на декілька віртуальних опорних точок (41), а для лежачої між сусідніми опорними точками (41) профільної ділянки (42) маршруту (18) визначається та візуально відображується в індикаторному пристрої (14) відповідна кривизна шляху (43).
7. Спосіб за п. 6, який відрізняється тим, що маршрут (18) і/або кривизна (43) профільної ділянки (42) візуально відображується в індикаторному пристрої (14).
8. Спосіб за п. 7, який відрізняється тим, що візуально відображена в індикаторному пристрої кривизна (43) профільної ділянки (42) відповідає миттєвому положенню машини (1, 2) на маршруті (18).
9. Спосіб за будь-яким з пп. 6-8, який відрізняється тим, що миттєве положення машини (1, 2) на маршруті (18) визначає в індикаторному пристрої (14) вихідна точка (44), у якій розпочинається візуалізація кривизни (43) відповідної профільної ділянки (42) і продовжується у напрямку (FR) руху машини (1, 2).
10. Спосіб за будь-яким з пп. 6-9, який відрізняється тим, що визначені значення кривизни (43) профільних ділянок (42) маршрутів (18) закладені у керуючому обчислювальному пристрої (12) з можливістю їх редагування та повторного виклику.
11. Спосіб за п. 10, який відрізняється тим, що радіуси (R2) кривизни (43) закладені в керуючому обчислювальному пристрої (12) з можливістю їх зміни.
12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що з визначеної кривизни (43) і щонайменше одного характеристичного стабілізаційного параметра (32) машини (1,2) виводиться розрахункова колія (45) машини (1,2).
13. Спосіб за п. 12, який відрізняється тим, що визначена розрахункова колія (45) візуально відображується в індикаторному пристрої (14) з одночасним заглушенням індикації відповідного маршруту (18).
14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що визначена розрахункова колія (45) і віртуальна майбутня колія (37) машини (1, 2) візуально відображуються у спільній індикації (14).
15. Спосіб за п. 14, який відрізняється тим, що миттєве положення машини (1, 2), визначена розрахункова колія (45) і віртуальна майбутня колія (37) машини (1, 2) спільно візуально відображуються так, щоб розрахункова колія (45) і віртуальна майбутня колія (37) машини (1, 2) приєднувалися до миттєвого положення машини (1, 2) у напрямку руху (FR) машини (1, 2) у вигляді криволінійних ділянок (46, 47).
16. Спосіб за будь-яким з пп. 1-15, який відрізняється тим, що має можливістю вибору довжини візуально відображених криволінійних ділянок (46, 47) розрахункової колії (45), віртуальної майбутньої колії (37) і кривизни (43) профільної ділянки (42) маршрутів (18).
17. Спосіб за будь-яким з пп. 1-16, який відрізняється тим, що в індикаторному пристрої (14) візуально відображується відпрацьовуваний маршрут (18) залежно від мінімального можливого кола повороту (34) машини.
18. Пристрій для здійснення способу візуалізації переміщення машини за пп. 1-17, який відрізняється тим, що машина (1, 2) містить сполучений з керуючим обчислювальним пристроєм (12) індикаторний пристрій (14), причому керуючий обчислювальний пристрій (12) з'єднаний щонайменше з однією системою (48) ведення в колії для водіння машини (1, 2) по маршрутах (18), а керуючий обчислювальний пристрій (12) визначає та візуально відображує в індикаторному пристрої (14) віртуальну майбутню колію (37) машини (1, 2) і/або розрахункову колію (45) машини (1, 2), і/або кривизну (43) маршруту (18) з врахуванням щонайменше одного характеристичного стабілізаційного параметра (32) машини (1, 2).
Текст
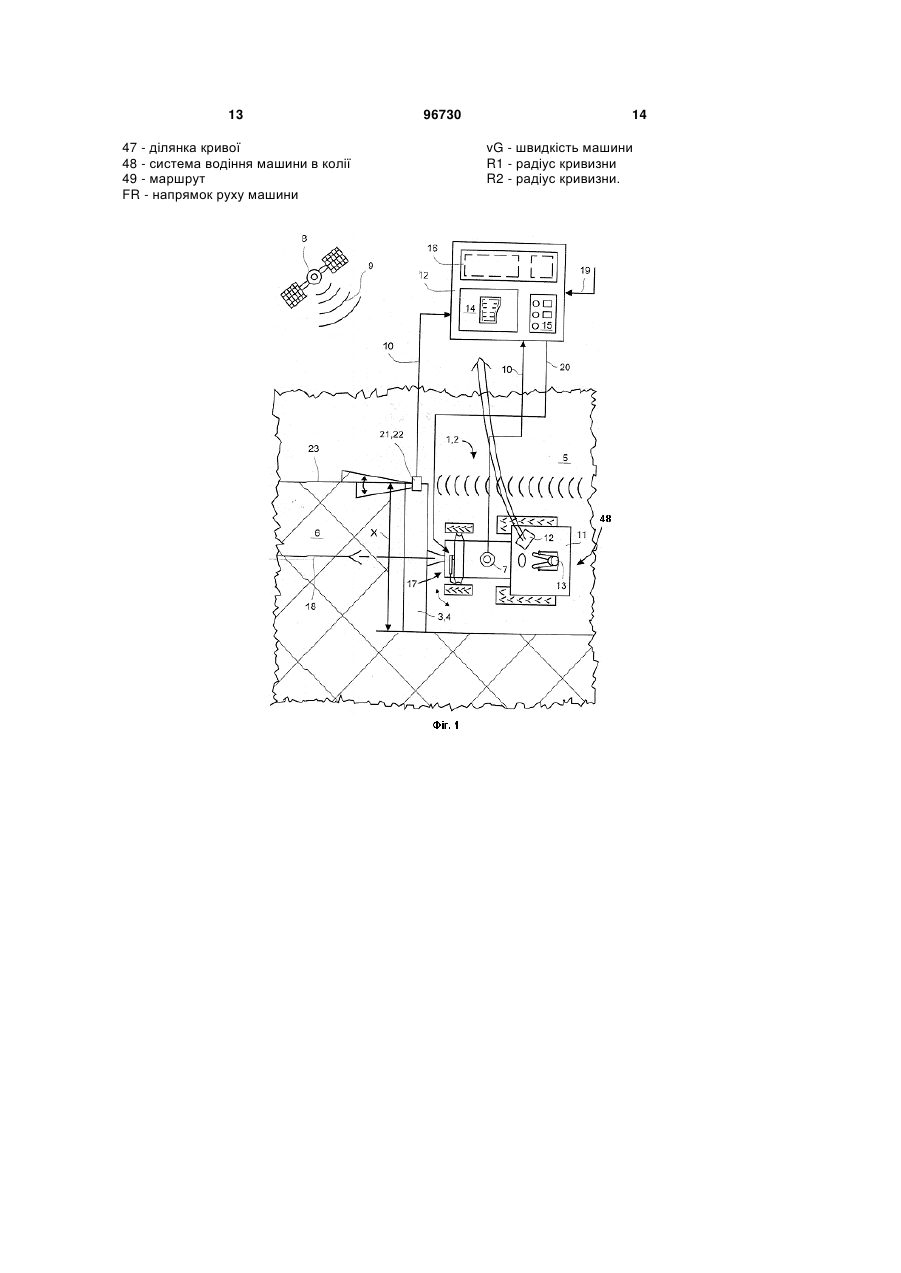
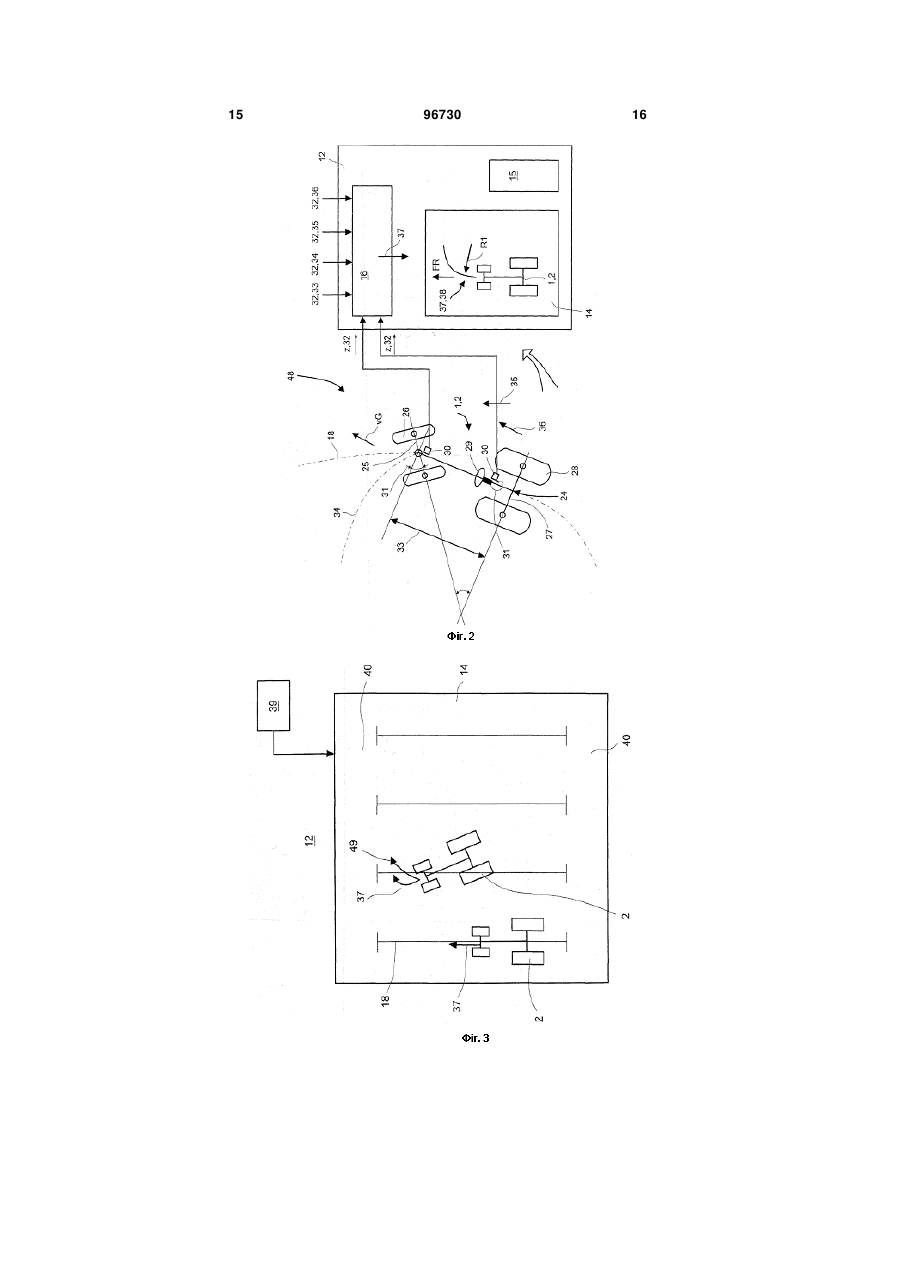
1. Спосіб візуалізації переміщення машини, причому машина містить щонайменше один сполучений з керуючим обчислювальним пристроєм індикаторний пристрій, а керуючий обчислювальний пристрій з'єднаний щонайменше з однією системою ведення машини в колії для водіння її по маршрутах і містить щонайменше один характеристичний стабілізаційний параметр машини, що описує її стабілізацію, який відрізняється тим, що керуючий обчислювальний пристрій (12) визначає та візуально відображує в індикаторному пристрої (14) віртуальну майбутню колію (37) машини ( 1 , 2 ) і/або розрахункову колію (45) машини ( 1 , 2 ) , і/або кривизну (43) маршруту (18) з врахуванням щонайменше одного характеристичного стабілізаційного параметра (32) машини (1, 2), а віртуальна майбутня колія (37) відображена у вигляді напрямної лінії (38) візуалізованого положення машини (1, 2) у напрямку її переміщення, причому віртуальна майбутня колія (37) характеризується радіусом кривизни (R1), який змінюється залежно від кута повороту (31) або ступеня рискання, а віртуальна майбутня колія 2 (19) 1 3 96730 4 пристрої (14) вихідна точка (44), у якій розпочинається візуалізація кривизни (43) відповідної профільної ділянки (42) і продовжується у напрямку (FR) руху машини (1, 2). 10. Спосіб за будь-яким з пп. 6-9, який відрізняється тим, що визначені значення кривизни (43) профільних ділянок (42) маршрутів (18) закладені у керуючому обчислювальному пристрої (12) з можливістю їх редагування та повторного виклику. 11. Спосіб за п. 10, який відрізняється тим, що радіуси (R2) кривизни (43) закладені в керуючому обчислювальному пристрої (12) з можливістю їх зміни. 12. Спосіб за будь-яким з пп. 1-11, який відрізняється тим, що з визначеної кривизни (43) і щонайменше одного характеристичного стабілізаційного параметра (32) машини (1,2 ) виводиться розрахункова колія (45) машини ( 1 , 2 ) . 13. Спосіб за п. 12, який відрізняється тим, що визначена розрахункова колія (45) візуально відображується в індикаторному пристрої (14) з одночасним заглушенням індикації відповідного маршруту (18). 14. Спосіб за будь-яким з пп. 1-13, який відрізняється тим, що визначена розрахункова колія (45) і віртуальна майбутня колія (37) машини (1, 2) візуально відображуються у спільній індикації (14). 15. Спосіб за п. 14, який відрізняється тим, що миттєве положення машини (1 , 2 ), визначена розрахункова колія (45) і віртуальна майбутня колія (37) машини (1, 2) спільно візуально відо бражуються так, щоб розрахункова колія (45) і віртуальна майбутня колія (37) машини (1, 2) приєднувалися до миттєвого положення машини (1, 2) у напрямку руху (FR) машини (1, 2) у вигляді криволінійних ділянок (46, 47). 16. Спосіб за будь-яким з пп. 1-15, який відрізняється тим, що має можливістю вибору довжини візуально відображених криволінійних ділянок (46, 47) розрахункової колії (45), віртуальної майбутньої колії (37) і кривизни (43) профільної ділянки (42) маршрутів (18). 17. Спосіб за будь-яким з пп. 1-16, який відрізняється тим, що в індикаторному пристрої (14) візуально відображується відпрацьовуваний маршрут (18) залежно від мінімального можливого кола повороту (34) машини. 18. Пристрій для здійснення способу візуалізації переміщення машини за пп . 1 - 1 7, який відрізняється тим, що машина (1, 2) містить сполучений з керуючим обчислювальним пристроєм (12) індикаторний пристрій (14), причому керуючий обчислювальний пристрій (12) з'єднаний щонайменше з однією системою (48) ведення в колії для водіння машини ( 1 , 2 ) по маршрутах (18), а керуючий обчислювальний пристрій (12) визначає та візуально відображує в індикаторному пристрої (14) віртуальну майбутню колію (37) машини (1, 2) і/або розрахункову колію (45) машини (1, 2), і/або кривизну (43) маршруту (18) з врахуванням щонайменше одного характеристичного стабілізаційного параметра (32) машини (1, 2). Винахід стосується способу і пристрою для візуалізації руху машин. З рівня техніки відомі так звані системи планування маршрутів, які разом з реєстрацією маршрутів машини, що рухається по оброблюваній території, здійснюють автоматичне відпрацювання раніше запрограмованих для цієї машини маршрутів. Наприклад, у DE 4342171 для процесу обробки ґрунту з використанням даних місцеположення машини на основі глобальної супутникової локаційної системи описана реєстрація ділянок шляху, які пройшла ґрунтооброблювальна машина на оброблюваній території. Потім визначені таким чином дані про ці ділянки, пройдені сільськогосподарською робочою машиною, залежно від форми виконання пристрою обробки даних передаються на кожну з сільськогосподарських робочих машин або ж ці дані перетворюються у центральному обчислювальному блоці в дані маршрутів, які потім візуалізуються в режимі реального часу і одночасно запам'ятовуються з можливістю повторних викликів. Подібного роду системи перш за все мають той недолік, що машина спочатку повинна відпрацьовувати певний маршрут, перш ніж він опиниться у блоці пам'яті з можливістю його повторного виклику і служитиме як базовий блок даних для формування наступних відпрацьовуваних маршрутів чи може бути візуалізований у будь яких індикаторних пристроях. Широко використовуваний нині спосіб планування маршрутів у поєднанні з так званими автоматичними системами водіння в колії відомий, наприклад, з US 6236924. Після попередньої розмітки оброблюваної території характерними опорними точками на основі програмного забезпечення і подальшого поділу її на певні маршрути з використанням різних критеріїв оптимізації машині можна задавати план маршрутів, за яким можна здійснювати автоматичне водіння машини на оброблюваній території. У процесі відпрацювання заданих маршрутів, як правило, реєструються фактично відпрацьовані маршрути. Подібного роду системам також властивий той недолік, що візуалізація маршрутів обмежена раніше встановленим планом маршрутів або фактично прокладеними машиною маршрутами. Тому в основу винаходу поставлена задача усунення вказаних недоліків рівня техніки і створення індикаторної системи для візуалізації руху машини, що дозволяє надавати водію машини разом з відомими даними про маршрути також похідні від них дані. Ця задача вирішується тим, що розміщений на машині керуючий обчислювальний пристрій визначає віртуальну майбутню колію машини з врахуванням щонайменше одного характеристичного стабілізаційного параметра машини і візуалізує цю колію в індикаторному пристрої. Завдяки цьому 5 водій машини одержує щонайменше інформацію про те, в якій майбутній колії рухатиметься його машина при збереженні даної її стабілізації та при врахуванні характеристичних параметрів машини. Це дозволяє водію машини своєчасно втручатися у процес керування машиною для цілеспрямованого відпрацювання визначеної колії, надійного об'їзду перешкод або щодо точного задання наступної колії, причому на короткому відрізку шляху. Щоб майбутня колія, яка визначається, відносно добре являла собою фактично відпрацьовувані машиною маршрути, у переважній формі виконання винаходу передбачене включення щонайменше в один характеристичний стабілізаційний параметр відстані між передньою та задньою осями ходової частини машини або ж мінімального кола повороту та миттєвого значення кута повороту. Згідно з наступною переважною формою виконання винаходу визначена та візуалізована майбутня колія точніше відображає майбутню колію, яку фактично проїжджає машина, лише тоді, коли один або декілька характеристичних стабілізаційних параметрів включають разом з відстанню між осями ходової частини машини або мінімальним колом її повороту також поєднання ступеня рискання та швидкості машини. Якість майбутньої колії, яка визначається, можна ще більш підвищити, якщо в характеристичні стабілізаційні параметри додатково включати стабілізацію машини та стабілізацію відпрацьовуваних нею маршрутів. Для постійного забезпечення водія машини даними про очікувані характеристики руху його машини і, отже, для забезпечення своєчасного корегування цього руху у наступній переважній формі виконання винаходу передбачена можливість постійного визначення та індикації віртуальної майбутньої колії, що візуалізується. Згідно з наступною переважною формою виконання винаходу зрозуміла водію машини індикація майбутніх маршрутів, що реально відображає очікувані переміщення машини, досягається тоді, коли віртуальна майбутня колія, що візуалізується, має радіус кривизни, який змінюється залежно від кута повороту та ступеня рискання. Згідно з ще однією формою виконання винаходу індикація віртуальної майбутньої колії здійснюється так, щоб в індикаторному пристрої візуалізувалося актуальне положення машини, а віртуальна майбутня колія проходила у напрямку руху машини як напрямна лінія візуалізованого положення машини. Таким чином водію машини надається наочна і зрозуміла система індикації майбутнього переміщення машини. Згідно з переважною формою виконання винаходу особливо ефективний навігаційний засіб надається водію машини тоді, коли один або декілька маршрутів, а також віртуальна майбутня колія візуалізуються шляхом спільної індикації. Це забезпечує особливу перевагу, яка полягає у тому, що водій машини за допомогою такої індикації може обирати оптимальний шлях руху для досягнення наступної відпрацьовуваної колії і цілеспрямовано налаштовуватися на неї. Завдяки цьому 96730 6 запропонована індикація надає водію машини засіб "для просиляння нитки в голку". Для поліпшення наочності індикації у наступній переважній формі виконання винаходу може бути передбачений підрозділ відпрацьовуваних машиною маршрутів на декілька віртуальних опорних точок, а для профільної ділянки маршруту, що лежить між сусідніми опорними точками, - визначення кривизни шляху та її візуалізація в індикаторному пристрої. Таким чином релевантна інформація, що надається водію машини, може бути обмежена тим, який радіус кривизни шляху машини повинен бути досягнутий для точного відпрацювання колії, заданої на базі маршруту. Відповідно до однієї з переважних форм виконання винаходу індикаторний пристрій може бути побудований з можливістю індикації маршруту і/або кривизни профільної ділянки шляху. Це надає водію машини дуже гнучко використовуваний навігаційний засіб, який гнучко підстроюється під потреби водія машини. Згідно з наступною переважною формою виконання винаходу особливо змістовною та наочно структурованою індикація виходить тоді, коли кривизна профільної ділянки маршруту, що візуалізується в індикаторному пристрої, відповідає миттєвому положенню машини на маршруті. У цьому випадку індикація обмежується безпосередньо миттєвим положенням машини на відпрацьовуваному маршруті, що означає синхронізацію миттєвого положення машини та індукованої кривизни маршруту і, отже, подальше підвищення повноти інформації. Згідно з переважною формою виконання винаходу подальше поліпшення наочності індикації досягається тоді, коли миттєве положення машини на маршруті визначає в індикаторному пристрої вихідна точка у візуалізації кривизни кожної з профільних ділянок та продовжується у напрямку руху машини. Ще одна форма виконання винаходу вирішує задачу забезпечення можливості подальшого використання вже одного разу визначених даних про кривизну маршрутів для наступних ідентично структурованих маршрутів з виключенням необхідності повторних розрахунків. Для цього передбачено, щоб визначені значення кривизни шляху були закладені у керуючому обчислювальному пристрої з можливістю редагування та повторного виклику. У зв'язку з цим особлива перевага щодо досягнення високої гнучкості індикаторної системи полягає у можливості зміни радіусів кривизни закладених в керуючому обчислювальному пристрої значень кривизни. Завдяки цьому вже встановлені радіуси кривизни маршрутів частково можуть бути використані для майбутніх маршрутів, а нові радіуси повинні встановлюватися лише в зонах, які відрізняються від звичайних. Виведенням розрахункової колії з визначеної кривизни шляху і щонайменше з одного характеристичного стабілізаційного параметра досягається надзвичайно вузька індикація, при якій велика кількість даних стискається так, щоб водій мав справу тільки з відпрацьовуваною в індикаторному пристрої колією. Технічно просте здійснення цієї 7 структури індикації досягається шляхом забезпечення можливості візуалізації визначеної розрахункової колії в індикаторному пристрої при одночасному заглушенні індикації відповідного маршруту. В одній з переважних форм виконання винаходу передбачена спільна візуалізація визначеної розрахункової колії і віртуальної майбутньої колії машини. Це надає водію машини не тільки дані про розрахункову колію, залежну від кривизни шляху і щонайменше від одного характеристичного стабілізаційного параметра машини, але й додаткові дані про очікувані відхилення її руху від цієї розрахункової колії. Згідно з наступною переважною формою виконання винаходу миттєве положення машини, визначена розрахункова колія і віртуальна майбутня колія машини спільно візуалізуються так, щоб розрахункова колія і віртуальна майбутня колія машини приєднувалися до миттєвого положення машини у напрямку її руху у вигляді ділянок кривих. Це забезпечує об'ємну та все ж виразно структуровану і, отже, наочно інформаційну суть індикації. У ще одній переважній формі виконання винаходу передбачається вибір довжини візуалізованих ділянок кривих розрахункової колії, віртуальної майбутньої колії і кривизни шляху. Таким чином для водія машини забезпечується надзвичайно гнучка і пристосована до індивідуальних потреб водія індикація. При візуалізації в індикаторному пристрої маршрутів, відпрацьовуваних залежно від мінімально можливого кола повороту машини, водій одержує ще один допоміжний засіб, використання якого дозволяє йому краще передбачати найбільш легко забезпечувані маршрути або найкоротший шлях машини. Конструктивно просте здійснення запропонованого способу виходить тоді, коли машина містить сполучений з керуючим обчислювальним пристроєм індикаторний пристрій, причому керуючий обчислювальний пристрій з'єднаний щонайменше з однією системою ведення машини в колії для її водіння по маршрутах, а також визначає та візуалізує в індикаторному пристрої віртуальну майбутню і/або розрахункову колію, і/або кривизну маршруту машини з врахуванням щонайменше одного характеристичного стабілізаційного параметра машини. Наступні переважні форми виконання винаходу описуються далі на основі наведеного прикладу здійснення винаходу з посиланнями на декілька фігур креслень, де на Фіг. 1 показана схема тягача з системою ведення в колії; на Фіг. 2 - схема індикаторного пристрою тягача, показаного на Фіг. 1; на Фіг. 3 - схема блока індикаторного пристрою, показаного на Фіг. 2; на Фіг. 4 - інші блоки індикаторного пристрою, показаного на Фіг. 2. На Фіг. 1 показано виконану у вигляді трактора 2 машину 1, до якої у передній її зоні приєднано виконаний у вигляді косильного механізму 3 завантажувальний агрегат 4 для збирання насаджень 6, що ростуть на оброблюваній території 5. Трактор 2 оснащений відомим навігаційним пристроєм 7 так званої глобальної супутникової локаційної 96730 8 системи, який приймає генеровані супутниками 8 цієї системи локаційні сигнали 9 і формує за ними сигнали 10 місцеположення трактора 2. При цьому у кабіні 11 водія 13 трактора 2 в робочій зоні водія розміщений щонайменше один керуючий обчислювальний пристрій 12, який згідно з наведеною на фігурі 1 у збільшеному масштабі схемою включає щонайменше один індикаторний пристрій 14, блок 15 введення даних і програмуючий модуль 16. Крім того, трактор 2 оснащений рульовою системою 17, виконаною з можливістю автоматичного керування, що забезпечує можливість автоматичного руху трактора 2 на оброблюваній території 5 по заданих маршрутах 18. Таке автоматичне водіння машини 1 у найпростішому випадку може здійснюватися за рахунок того, що у керуючому обчислювальному пристрої 12 закладені відпрацьовувані маршрути 18, причому їх формування здійснюється ззовні або ж у самому керуючому обчислювальному пристрої 12. При зовнішньому формуванні маршрутів зовнішні сигнали 19 маршрутів відомим чином шляхом звичайної передачі даних передаються на керуючий обчислювальний пристрій 12. З урахуванням сигналів 10 місцеположення трактора 2, сформованих навігаційним пристроєм 7 глобальної супутникової локаційної системи, керуючий обчислювальний пристрій 12 генерує так звані рульові сигнали 20 і передає їх на рульову систему 17, що забезпечує автоматичне водіння машини 1 по заданих маршрутах на оброблюваній території 5, причому такого роду системи позначають як системи водіння в колії. Не виходить за рамки винаходу те, що сигнали місцеположення машини 1 на оброблюваній території 5 можуть генеруватися також оптоелектронними навігаційними пристроями 21, наприклад, лазерним сканером 22, який детектує край 23 насаджень. Крім того, не виходить за рамки винаходу те, що подана у вигляді трактора 2 машина 1 може бути виконана як у вигляді будь-якої сільськогосподарської робочої машини, наприклад, у вигляді комбайна, так й у вигляді будь-якої машини несільськогосподарського призначення, наприклад, у вигляді будівельної машини. На Фіг. 2 показана детальна схема виконаної у вигляді тягача 2 машини 1, а також збільшена схема запропонованого індикаторного пристрою 14. У лівій частині Фіг. 2 показана ходова частина 24 тягача 2 зі встановленими на передній осі 25 керованими передніми колесами 26 та встановленими на задній осі 27 некерованими задніми колесами 28. Відоме і тому більш детально не описане рульове колесо 29 трактора 2 і/або кожне з керованих передніх коліс 26 обладнане датчиком 30 кута повороту для детектування кута повороту 31. Сигнали кута повороту Z передаються на програмуючий модуль 18 керуючого обчислювального пристрою 12 і одночасно утворюють один з характеристичних стабілізаційних параметрів 32 машини 1. При цьому відомі такі геометричні параметри трактора 2, як, наприклад, відстань 33 між осями ходової частини, максимально допустимий кут повороту керованих коліс і пов'язане з ним мінімальне коло повороту, які також закладені у керуючому обчислювальному пристрої 12 як складові 9 запропонованого стабілізаційного параметра 32. Якщо машина 1 не оснащена датчиками 30 так званого кута повороту, то не виходить за рамки винаходу можливість стабілізації машини 1 шляхом визначення так званого ступеня рискання і швидкості vG руху машини 1. В інших формах виконання винаходу також може бути передбачене, щоб характеристичні стабілізаційні параметри 32, як далі буде описане більш детально, включали стабілізацію 35 машини і стабілізацію відпрацьовуваних маршрутів 18, які також передаються на керуючий обчислювальний пристрій 12. Згідно з винаходом, програмуючий модуль 16 за наявними характеристичними стабілізаційними параметрами 32 машини 1 визначає майбутню віртуальну колію 37. При цьому може враховуватися відома математична залежність, або всі раніше описані характеристичні стабілізаційні параметри 32, або деякі з цих параметрів. Наприклад, математично проста структурована модель може бути одержана шляхом визначення віртуальної майбутньої колії лише на основі визначеного кута повороту 31 і геометричних параметрів 33 машини. Чим більшу кількість характеристичних стабілізаційних параметрів 32 враховано при такому визначенні, тим точніше одержана форма віртуальної майбутньої колії 37 відображає реальні умови. Наприклад, при врахуванні мінімально можливого кола повороту 34 машини 1 можна уникнути генерування програмуючим модулем 16 таких майбутніх віртуальних колій 37, які машина 1 не може відпрацьовувати вже з конструктивних, технічних причин. У прикладі здійснення винаходу, поданому на Фіг. 2, віртуальна майбутня колія 37 машини 1 візуалізується лише так, щоб в індикаторному пристрої 14 спочатку було зображено виконану у вигляді тягача 2 машину 1 і до неї у передній її зоні у напрямку руху FR було приєднане зображення визначеної віртуальної майбутньої колії 37, так що водію трактора 2 безпосередньо вказується, по якій колії 37 трактор 1 повинен продовжувати рух при збереженні реальних характеристичних стабілізаційних параметрів 32. При цьому програмуючий модуль 16 може бути виконаний так, щоб він залежно від характеристичних стабілізаційних параметрів 32 постійно визначав віртуальну майбутню колію 37, постійно актуалізуючи та візуалізуючи її форму. У найпростішому випадку візуалізація віртуальної майбутньої колії 37 здійснюється так, щоб вона зображувалася у вигляді напрямної лінії 38 з радіусом кривизни R1, визначеним за характеристичними стабілізаційними параметрами 32, причому цей радіус значною мірою залежить від кута повороту 31 або від так званого ступеня рискання. Швидко уловлювана водієм 13 машини 1 візуалізація досягається тоді, коли віртуальна майбутня колія 37 постійно візуалізується у вигляді напрямної лінії 38 у напрямку руху машини перед нею і у найпростішому випадку походить від поздовжньої осі машини, так що напрямна лінія 38 постійно випереджає зображення машини 1. На Фіг. 3 для спрощення показано тільки індикаторний пристрій 14 керуючого обчислювального пристрою 12. В індикаторному пристрої 14 показа 96730 10 но перш за все безліч маршрутів 18 машини 1, які наперед закладені в керуючий обчислювальний пристрій 12 або визначаються окремою системою 39 планування маршрутів. Як показано на Фіг. 3, маршрути 18 можуть бути подані у вигляді прямих ліній, причому розташованих паралельно одна одній. Однак маршрути 18 можуть бути подані також у вигляді кривих ліній, причому не обов'язково паралельних одна одній. Крім того, в індикаторному пристрої 14 показані два різних миттєвих положення тягача 2, причому до кожного символічного зображення тягача приєднана запропонована віртуальна майбутня колія 37. На лівому зображенні віртуальна майбутня колія 37 проходить майже паралельно заданому маршруту 18. На іншому зображенні тягач 2 рухається поперечно заданому маршруту 18, причому знову ж таки до зображення тягача перед ним приєднана віртуальна майбутня колія 37, визначена за характеристичними стабілізаційними параметрами 32. У структурованому таким чином зображенні водій 13 може безпосередньо розпізнати відхилення визначеної віртуальної майбутньої колії 37 від заданого маршруту 18 і шляхом відповідних керуючих дій спрямувати машину 1 так, щоб з мінімальними керуючими зусиллями повернути її на заданий маршрут 18. У випадку сільськогосподарського застосування такий принцип індикації особливо корисний для водія 13 сільськогосподарської робочої машини тоді, коли машина 1 перебуває на краю поля 40 і налаштовується на наступний заданий відпрацьовуваний маршрут 18. У цьому випадку водій 13 машини 1 може безпосередньо використовувати цю індикацію як допомогу у водінні машини. Особливо ефективною така допомога виявляється тоді, коли в індикаторному пристрої 14 візуалізується разом з віртуальною майбутньою колією 37 також маршрут 18 для мінімально можливого кола повороту 34. Це дозволяє водію 13 машини 1 ще ефективніше використовувати маневреність машини 1 при її веденні наступним маршрутом 18. Особливо велике значення має індикація маршруту 49, відповідного мінімально можливому колу повороту 34 на краю поля 40, оскільки водію 13 надається можливість самому оцінювати, який з наступних відпрацьовуваних маршрутів 18 машини 1 взагалі може бути здійснений виходячи з технічних передумов. На Фіг. 4 подана схема наступної форми виконання запропонованої візуалізації віртуальної майбутньої колії 37. Перш за все відтворений профільований криволінійний маршрут 18. Математично цей маршрут може бути описаний шляхом поділу його на декілька опорних точок 41, причому для кожної з лежачих між сусідніми точками 41 профільних ділянок 42 визначається миттєва кривизна 43 маршруту 18 у цій зоні. Значення кривизни 43 тим краще описують весь маршрут 18, чим більше на заданому маршруті 18 передбачено опорних точок 41 і, отже, профільних ділянок 42. Таким чином можна зображати заданий маршрут 18 також у такій формі, щоб безпосередньо в індикаторному пристрої 14 керуючого обчислювального пристрою 12 поряд з дійсним профілем маршруту 18 або замість нього візуалізувалася також кривизна 43 маршруту 18, що з'являється на ви 11 значеній профільній ділянці 42. Особливо наочною структурована візуалізація виходить тоді, коли візуалізована в індикаторному пристрої 14 кривизна 43 профільної ділянки 42 маршруту 18 відповідає миттєвому положенню машини 1 на заданому маршруті 18 (зображення А на Фіг. 4). Наочність індикації може бути підвищена за рахунок задания в індикаторному пристрої 14 миттєвого положення машини 1 на маршруті 18 вихідною точкою 44, у якій розпочинається візуалізація кривизни 43 кожної з профільних ділянок 42 та продовження її у напрямку руху FR машини 1. Висока гнучкість використання запропонованого керуючого обчислювального пристрою 12 досягається тоді, коли визначені значення кривизни 43 маршрутів 18 закладені у керуючому обчислювальному пристрої 12, наприклад, у програмуючому модулі 16, з можливістю редагування та повторних викликів. Таким чином вже одного разу визначені значення кривизни 43 маршрутів можуть бути повторно використані при індикації паралельних або однаково профільованих маршрутів 18 чи їх ділянок з виключенням потреби у повторному поділі профілю на ділянки та розрахунку кожної кривої 43. Гнучкість системи ще більш підвищується за рахунок забезпечення можливості редагування, наприклад, за допомогою блока 15 введення даних, визначених та закладених радіусів кривизни R2, завдяки чому водій 13 машини 1 може змінювати форму маршруту 18 безпосередньо шляхом введення даних про радіус кривизни R2. Потім визначена таким чином кривизна 43 профільної ділянки 42 заданого маршруту 18 перераховується за вибірковими або всіма раніше описаними характеристичними стабілізаційними параметрами 32 з використанням методу, описаного раніше для визначення віртуальної майбутньої колії 37. В результаті цього одержують розрахункову колію 45 (зображення С на Фіг. 4), у якій разом із специфічними даними маршрутів враховуються також й специфічні дані машини. Одержана таким шляхом розрахункова колія може більш точно відпрацьовуватися відповідною машиною 1, оскільки ця колія краще відповідає технічним можливостям машини. У зв'язку з цим підвищена наочність досягається тоді, коли при індикації заново визначеної розрахункової колії 45 одночасно відміняється заданий маршрут 18. Згідно із зображенням D на Фіг. 4 у наступній переважній формі виконання винаходу візуалізація з використанням індикаторного пристрою 14 здійснюється таким чином, що спільно відображаються як розрахункова колія 45, визначена залежно від характеристичних стабілізаційних параметрів 32, так і віртуальна майбутня колія 37, визначена також з урахуванням характеристичних стабілізаційних параметрів 32. Особливо переважна форма виконання винаходу виходить тоді, коли миттєве положення машини 1, розрахункова колія 45 і віртуальна майбутня колія 37 машини 1 спільно візуалізуються так, щоб розрахункова колія 45 і віртуальна майбутня колія 37 машини 1 приєднувалися до миттєвого положення машини 1 у напрямку її руху у вигляді ділянок кривих 46, 47. При цьому ділянки кривих 45, 46, а також індуковану кривизну 96730 12 43 можна змінювати залежно від їх довжини, відображеної на індикаторному пристрої 14, наприклад, шляхом введення цієї довжини через блок 15 введення даних, причому існує також можливість визначення довжини, що візуалізується, залежно від швидкості руху машини. У цьому випадку ця довжина відповідає, наприклад, ділянці шляху, яку машина 1 проходить у певному часовому вікні, наприклад, у найближчі 10 секунд. Не виходить за рамки можливостей фахівця те, що описаний спосіб і здійснюючий його пристрій можуть бути перетворені неописаним тут способом або використані у відмінних від поданих тут випадках їх застосування з досягненням описаних тут ефектів без виходу за рамки винаходу. Перелік позицій елементів на кресленнях: 1 - машина 2 - трактор 3 - косильний агрегат 4 - завантажувальний апарат 5 - територія 6 - насадження 7 - навігаційний пристрій глобальної супутникової локаційної системи 8 - супутник глобальної супутникової локаційної системи 9 - локаційний сигнал 10 - сигнал місцеположення машини 11 - кабіна водія 12 - керуючий обчислювальний пристрій 13 - водій машини 14 - індикаторний пристрій 15 - блок введення даних 16 - програмуючий модуль 17 - рульова система 18 - маршрут 19 - сигнал маршруту 21 - навігаційний пристрій 20 - рульовий сигнал 22 - лазерний сканер 23 - край насаджень 24 - ходова частина машини 25 - передня вісь ходової частини машини 26 - переднє колесо машини 27 - задня вісь ходової частини машини 28 - заднє колесо машини 29 - рульове колесо 30 - датчик кута повороту 31 - кут повороту 32 - стабілізаційний параметр 33 - відстань між передньою та задньою осями ходової частини машини 34 - коло повороту машини 35 - стабілізація машини 36 - стабілізаційний маршрут 37 - віртуальна майбутня колія 38 - напрямна лінія 39 - система планування маршрутів 40 - край поля 41 - опорна точка 42 - профільна ділянка 43 - кривизна шляху 44 - вихідна точка 45 - розрахункова колія 46 - ділянка кривої 13 47 - ділянка кривої 48 - система водіння машини в колії 49 - маршрут FR - напрямок руху машини 96730 14 vG - швидкість машини R1 - радіус кривизни R2 - радіус кривизни. 15 96730 16 17 Комп’ютерна верстка А. Крижанівський 96730 Підписне 18 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for car movement visualization
Автори англійськоюDiekhans Norbert, Brunnert Andreas, Meyer zu Helligen Lars Peter, Nienaber Gerhard
Назва патенту російськоюСпособ и устройство для визуализации перемещений машин
Автори російськоюДикханс Норберт, Бруннерт Андреас, Мейер цу Хеллиген Ларс Петер, Нинабер Герхард
МПК / Мітки
МПК: A01B 69/00, G05D 1/02, A01D 41/12, B60W 30/10
Мітки: пристрій, спосіб, візуалізації, переміщень, машин
Код посилання
<a href="https://ua.patents.su/9-96730-sposib-i-pristrijj-dlya-vizualizaci-peremishhen-mashin.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для візуалізації переміщень машин</a>
Пристрій для регулювання переміщень рейки
Номер патенту: 839
Опубліковано: 16.07.2001
Автори: Бучко Ігор Володимирович, Кацберт Леонід Антонович, Бучко Володимир Михайлович
МПК: E01B 9/30
Мітки: пристрій, рейки, переміщень, регулювання
Формула / Реферат:
Пристрій для регулювання переміщень рейки, який включає пружну клему, що вмонтована в пазах анкера, нижня частина якого залита в бетонній шпалі і взаємодіє з підошвою рейки через ізолятор, який відрізняється тим, що обмежувальний виступ ізолятора виконаний у вигляді рейкового пристрою, розташованого поміж обмежувальним виступом ізолятора та торцем підошви рейки або якорем і виконаний під кутом "α" відносно осі рейки, a...
Спосіб і машина для підбивання шпал рейкової колії

Номер патенту: 72899
Опубліковано: 16.05.2005
Автори: Херберт Вьоргьоттер, Йозеф Тойрер
МПК: E01B 27/16
Мітки: рейкової, колії, підбивання, машина, спосіб, шпал
Формула / Реферат:
1. Спосіб підбивання шпал рейкової колії, причому рейкова колія (2), яку необхідно трохи підняти та підбити, обмежена двома ходовими механізмами (4) з утворенням ділянки підйому колії (19), який відрізняється тим, що в першій робочій поїздці для підйому колії та внесення щебеню під колію (2) ділянку підйому колії подовжують у поздовжньому напрямку колії, і що в наступній робочій поїздці для формування остаточного заданого положення та...
Спосіб контролю зносу робочого органа машин або механізмів та інформаційний пристрій для його здійснення
Номер патенту: 55210
Опубліковано: 17.03.2003
Автори: Бондаренко Микола Олександрович, Кулаківський Володимир Миколайович, Дніпровський Олексій Іванович
МПК: G01N 3/56
Мітки: робочого, спосіб, інформаційний, контролю, органа, механізмів, зносу, здійснення, машин, пристрій
Формула / Реферат:
1. Спосіб контролю зносу робочого органа машин або механізмів, який передбачає вимірювання чистого робочого часу та інших додаткових параметрів роботи робочого органа і наступне визначення зносу робочого органа з урахуванням умов роботи і виду робочого органа, який відрізняється тим, що попередньо задають значення коефіцієнта, який враховує вартість робочого органа та вартість одиниці часу роботи на даній машині або механізмі, як додаткові...
Пристрій для самообкопування бойових машин
Номер патенту: 32630
Опубліковано: 15.02.2001
Автори: Риць Олександр Романович, Трелісер Віталій Васильович, Горожанин Юрій Георгийович, Гнєдаш Микола Федорович
МПК: F41H 7/02
Мітки: бойових, самообкопування, пристрій, машин
Текст:
...допомогою петель, ланцюги, утримуючі відвал у робочому положенні,»чотири стяжки для кріплення відвала в по хідному положенні Для укладання ланцюгів у похідному положенні виконаний спеціальний вузол кріплення Цей пристрій не має високої продуктивності, тому що різальна кромка відвала виконана рівною (без зубців), що затруднює можливість роботи пристою на твердих і, особливо, на промерзлих грунтах Відоме також бульдозерне обладнання...
Пристрій вимірювання кута вибігу ротора синхронних машин
Номер патенту: 66405
Опубліковано: 17.05.2004
Автор: Агамалов Олег Миколайович
МПК: H02P 9/10
Мітки: пристрій, кута, машин, синхронних, вибігу, ротора, вимірювання
Формула / Реферат:
Пристрій вимірювання кута вибігу ротора синхронних машин, що вимірює кут між віссю магнітних полюсів ротора та віссю обертового магнітного поля статора і складається з датчиків та електронної схеми вимірювання, який відрізняється тим, що як датчики використані два датчика Холла, що мають загальні кола живлення та розташовані в просторі робочого зазору синхронної машини між статором та ротором під кутом
Попередній патент: Піч для виробництва олефіну
Наступний патент: Спосіб одержання циклогексанону та циклогексанолу
Випадковий патент: Спосіб одержання інсуліну в рослинах