Шпиндельна опора на постійних магнітах
Номер патенту: 101907
Опубліковано: 13.05.2013
Автори: Зіненко Володимир Миколайович, Гриценко Володимир Ілліч, Тарасов Віктор Олексійович
Формула / Реферат
1. Шпиндельна опора на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, яка відрізняється тим, що вал шпиндельної опори виконаний складовим і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, у втулках, установлених в корпусі шпиндельної опори на постійних магнітах, над магнітами вала шпиндельної опори по осях прямокутної систем координат установлені по чотири силових магнітних відштовхувача, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран з магнітном'якого матеріалу, п'єзоелектричний двигун, установлений в керамічний ізолятор, і регулювальний гвинт, причому постійні магніти силових магнітних відштовхувачів полюсами спрямовані до однойменних полюсів магнітів вала, силові магнітні відштовхувачі і магніт вала, які установлені в одному перерізі опори, утворюють силовий магнітний підвіс вала шпиндельної опори на постійних магнітах, в корпусі шпиндельної опори на постійних магнітах в керамічній втулці по півосях систем прямокутних координат, осі якої паралельні осям систем координат, по яких установлені силові магнітні відштовхувачі і установлені датчики положення вала шпиндельної опори на постійних магнітах, пристрій автоматичного управління положенням вала шпиндельної опори на постійних магнітах включає задатчик, перший диференційний підсилювач сигналу неузгодження, другий диференційний підсилювач сигналу неузгодження, перший вимірювач величини зазору, другий вимірювач величини зазору, підсилювачі, вимикач "увімк.-вимк.", п'єзоелектричні двигуни силових магнітних відштовхувачів, причому датчики положення вала шпиндельної опори на постійних магнітах електрично зв'язані з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому вихід задатчика з'єднаний з першими входами першого диференційного підсилювача сигналу неузгодження, другого диференційного підсилювача сигналу неузгодження, датчики положення вала шпиндельної опори на постійних магнітах з'єднані з вимірювачами величини зазору, а їх виходи з'єднані з другими входами першого і другого диференційних підсилювачів сигналу неузгодження, перший і другі виходи першого і другого диференційних підсилювачів сигналу неузгодження з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі "увімк.-вимк." з'єднані з п'єзоелектричними двигунами силових магнітних відштовхувачів.
2. Шпиндельна опора на постійних магнітах за п. 1, яка відрізняється тим, що по осях прямокутних систем координат над магнітами вала встановлені групи паралельно з'єднаних
силових магнітних відштовхувачів.
Текст
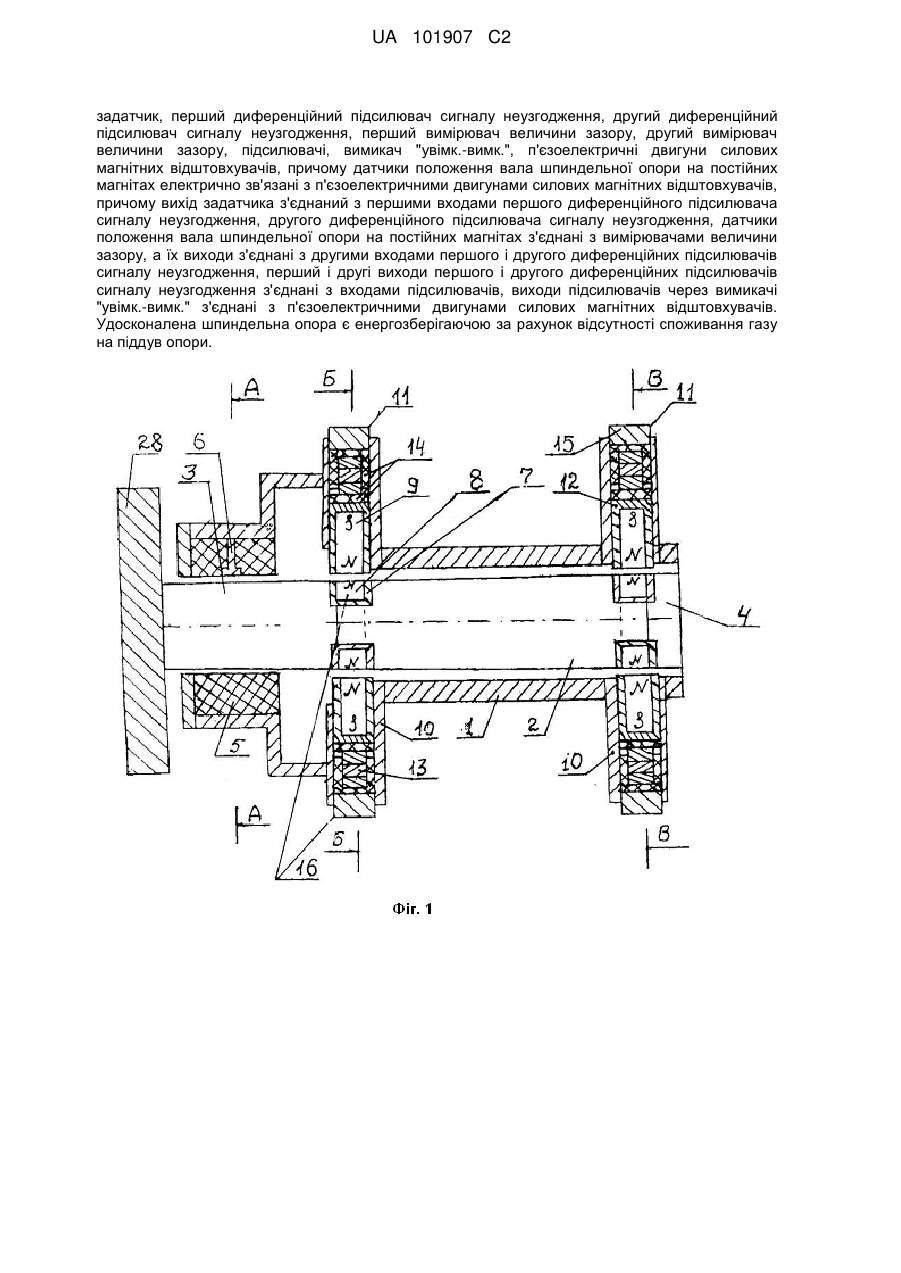
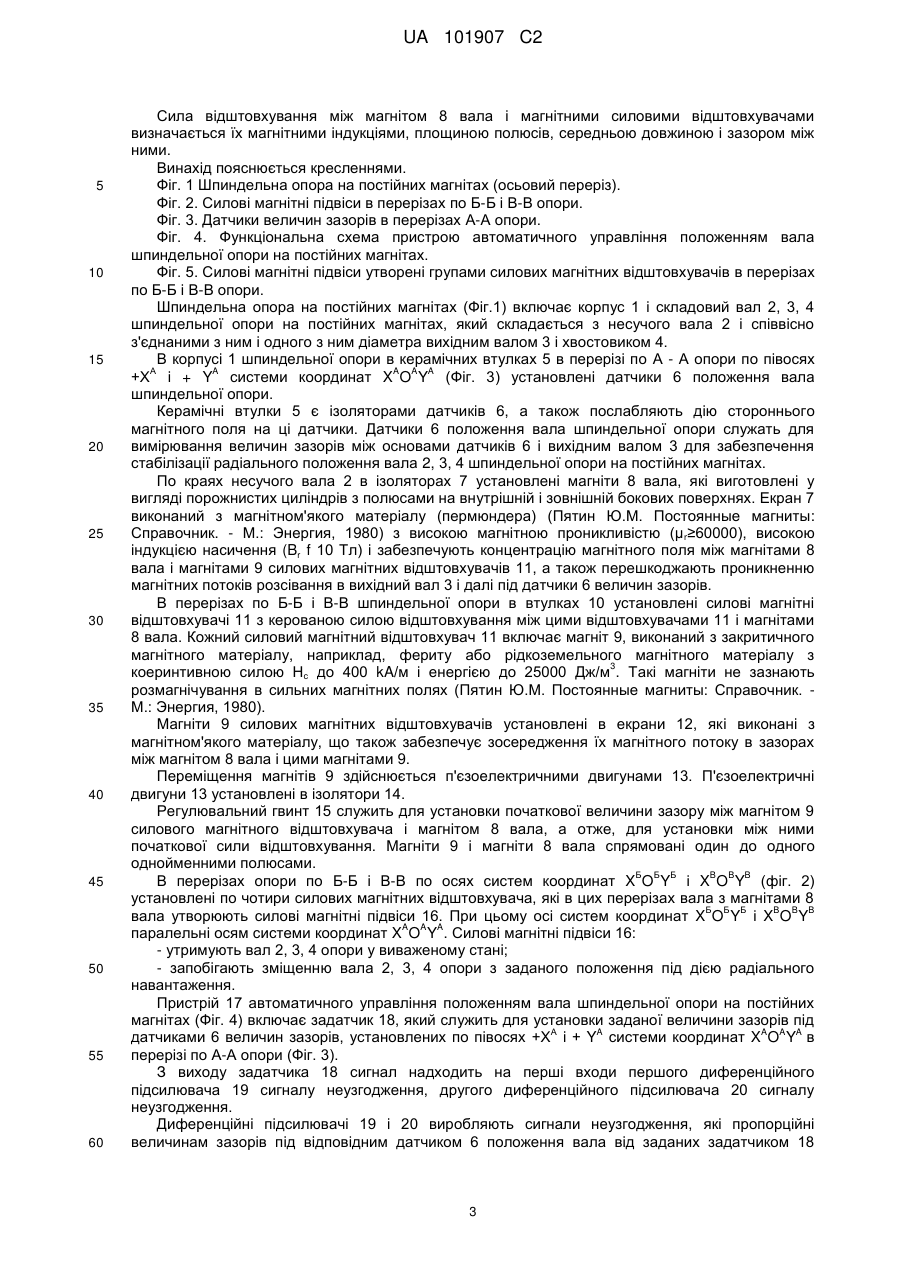
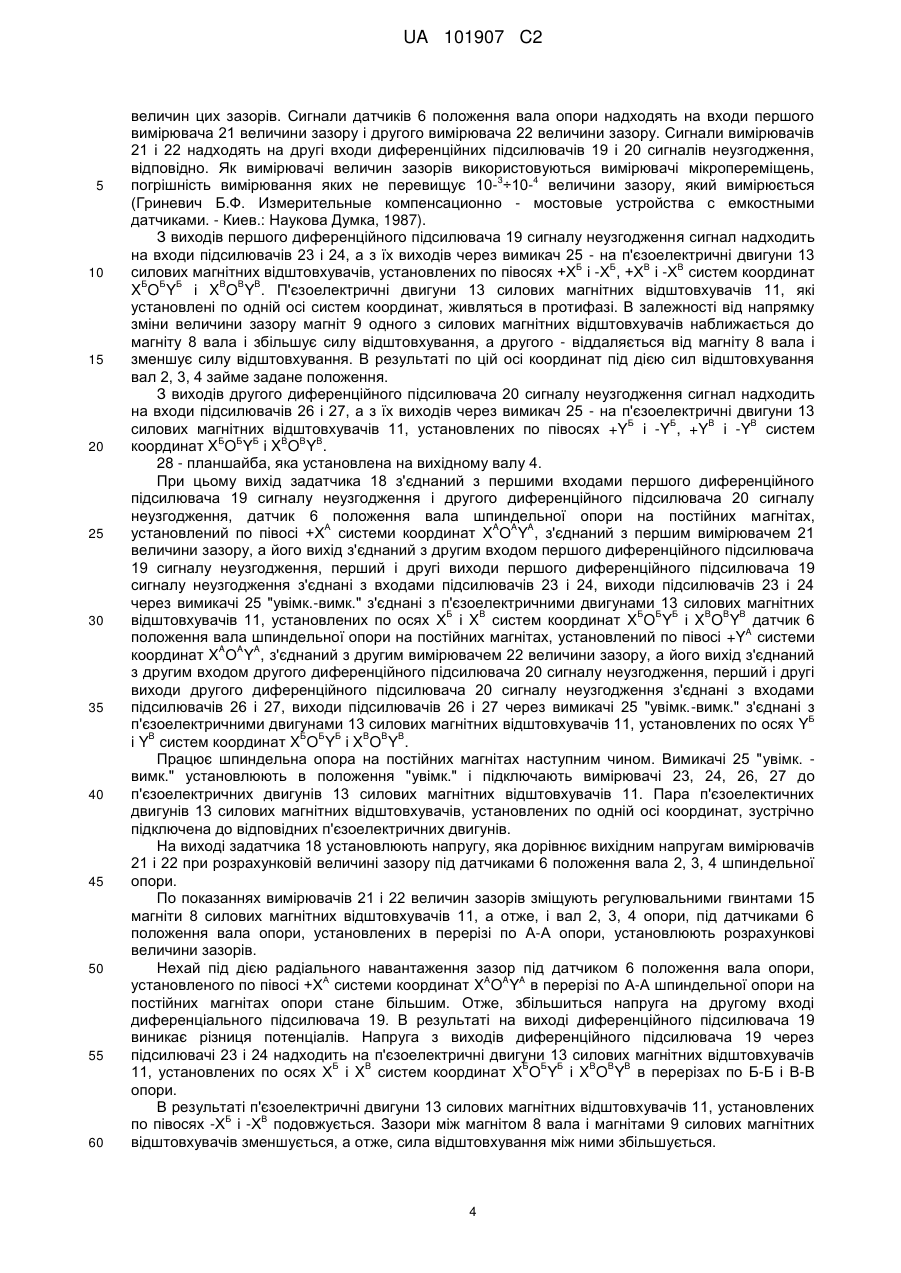
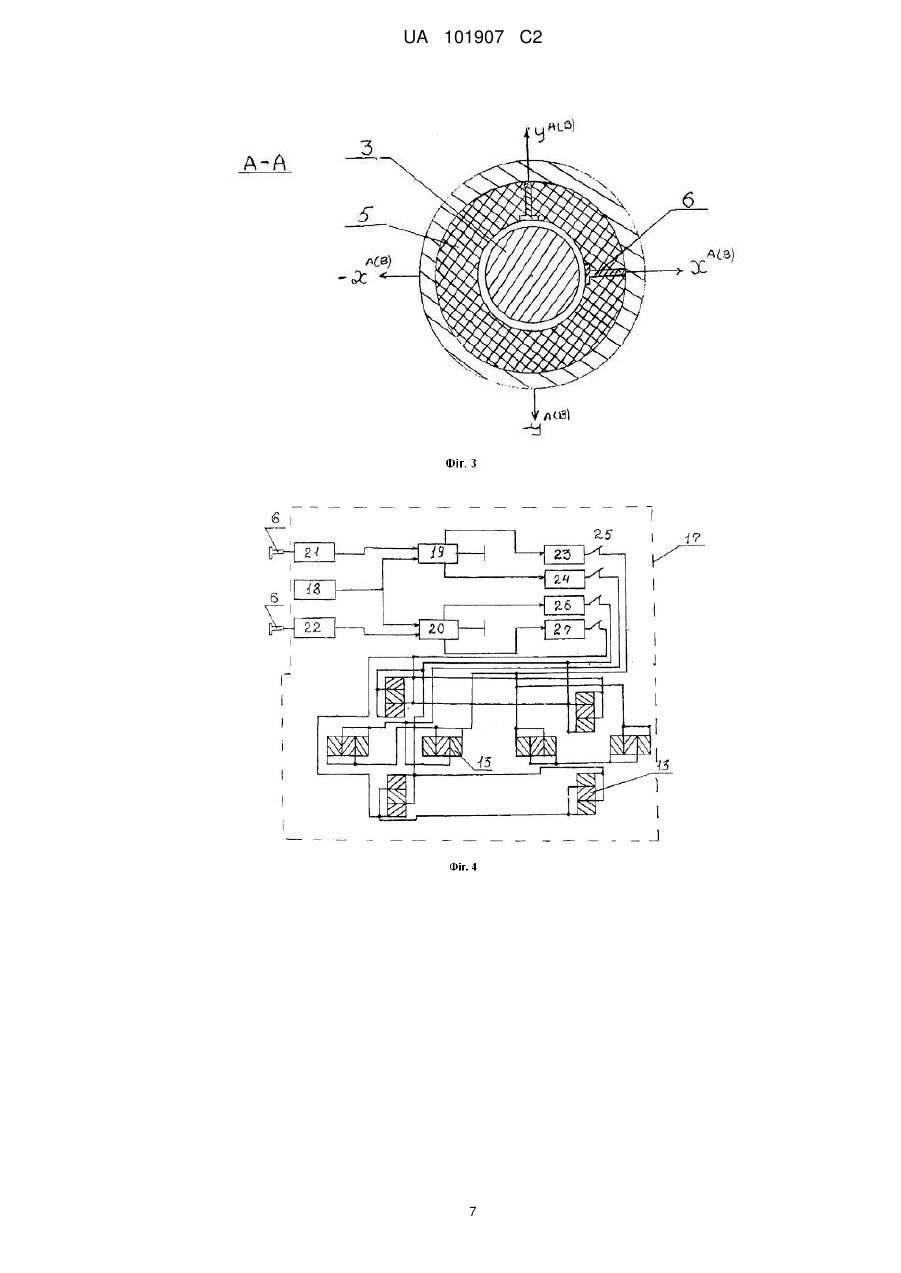
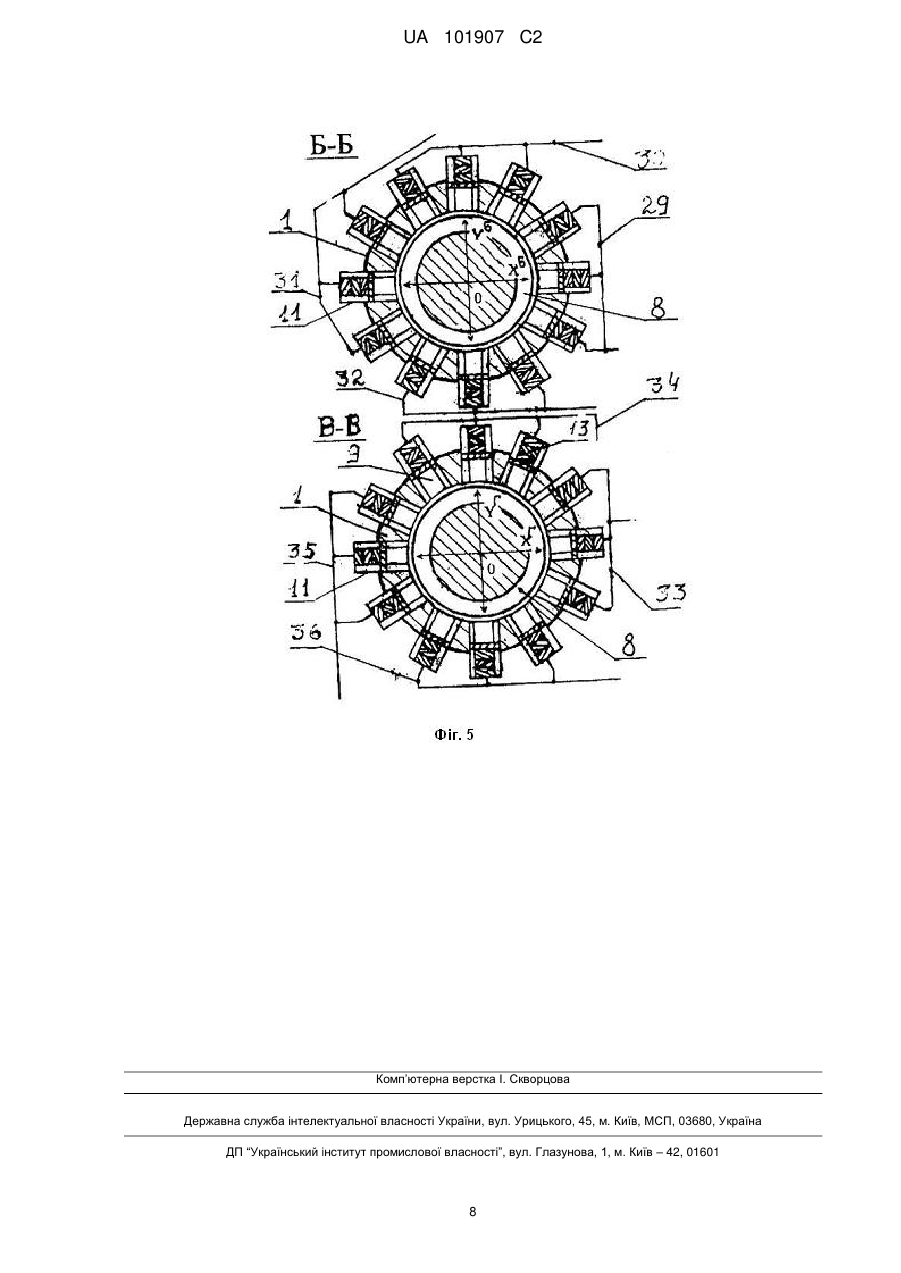
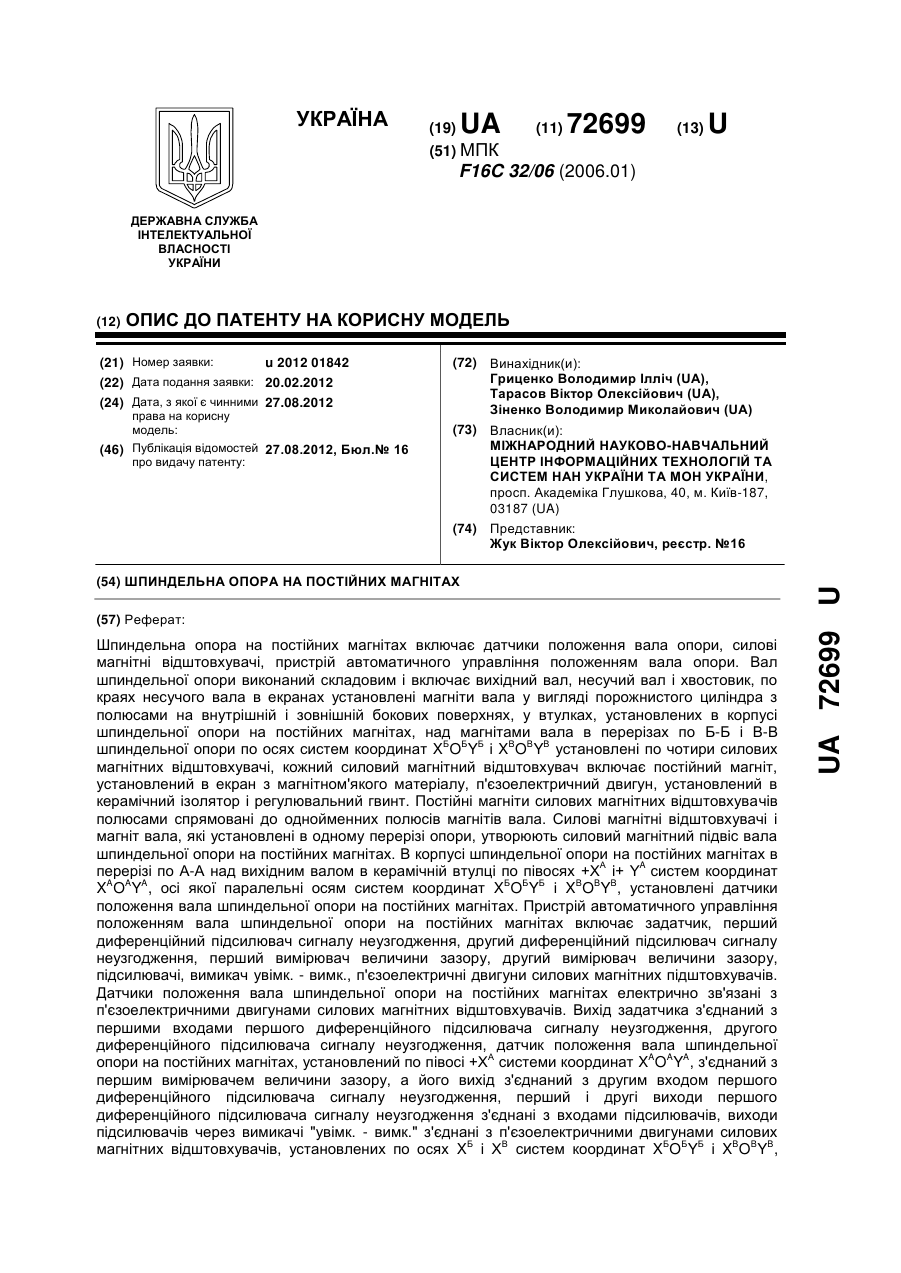
Реферат: Пристрій належить до верстатобудування і, зокрема, до систем автоматичного управління і стабілізації положення формоутворюючих елементів верстатів високої точності для обробки точних елементів оптики і механіки і може використовуватись для побудови прецизійних опор на постійних магнітах. Це досягається тим, що в шпиндельній опорі на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, вал виконаний складовим і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, у втулках, установлених в корпусі шпиндельної опори на постійних магнітах, над магнітами вала шпиндельної опори по осях прямокутної систем координат установлені по чотири силових магнітних відштовхувача, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран з магнітном'якого матеріалу, п'єзоелектричний двигун, установлений в керамічний ізолятор і регулювальний гвинт, причому постійні магніти силових магнітних відштовхувачів полюсами спрямовані до однойменних полюсів магнітів вала, силові магнітні відштовхувачі і магніт вала, які установлені в одному перерізі опори, утворюють силовий магнітний підвіс вала шпиндельної опори на постійних магнітах, в корпусі шпиндельної опори на постійних магнітах в керамічній втулці по півосях систем прямокутних координат, осі якої паралельні осям систем координат, по яких установлені силові магнітні відштовхувачі і установлені датчики положення вала шпиндельної опори на постійних магнітах, пристрій автоматичного управління положенням вала шпиндельної опори на постійних магнітах включає UA 101907 C2 (12) UA 101907 C2 задатчик, перший диференційний підсилювач сигналу неузгодження, другий диференційний підсилювач сигналу неузгодження, перший вимірювач величини зазору, другий вимірювач величини зазору, підсилювачі, вимикач "увімк.-вимк.", п'єзоелектричні двигуни силових магнітних відштовхувачів, причому датчики положення вала шпиндельної опори на постійних магнітах електрично зв'язані з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому вихід задатчика з'єднаний з першими входами першого диференційного підсилювача сигналу неузгодження, другого диференційного підсилювача сигналу неузгодження, датчики положення вала шпиндельної опори на постійних магнітах з'єднані з вимірювачами величини зазору, а їх виходи з'єднані з другими входами першого і другого диференційних підсилювачів сигналу неузгодження, перший і другі виходи першого і другого диференційних підсилювачів сигналу неузгодження з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі "увімк.-вимк." з'єднані з п'єзоелектричними двигунами силових магнітних відштовхувачів. Удосконалена шпиндельна опора є енергозберігаючою за рахунок відсутності споживання газу на піддув опори. UA 101907 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до верстатобудування і, зокрема, до систем автоматичного управління і стабілізації положення формоутворюючих елементів верстатів високої точності для обробки точних елементів оптики і механіки і може використовуватись для побудови прецизійних опор на постійних магнітах. По а.с. СРСР № 1 500 805 від 1.10.1987 р. відома аеростатична шпиндельна опора. Ця аеростатична шпиндельна опора вибрана як прототип. Аеростатична шпиндельна опора прототипу включає аеростатичну шпиндельну опору з двома лініями піддува. По зовнішніх сторонах радіальної шпиндельної опори розташовані два автономних компенсатори перекосу вала опори, які наділені регульованими обмежувачами витрату гасу. В кожний регульований обмежувач витрати гасу входять п'єзоелектричний двигун з регулятором тиску в гасовому шарі. При цьому регульовані обмежувачі витрати гасу, які розташовані симетрично відносно датчиків положення вала, можуть бути об'єднані в групи, в яких п'єзоелектричні двигуни паралельно підключені до системи автоматичного управління. Слід відзначити наступне. Аеростатична шпиндельна опора складна у виготовленні. Розрахункова величина зазору між втулкою і валом опори знаходиться в інтервалі від 10 мкм до 30 мкм. Експлуатація аеростатичної шпиндельної опори передбачає наявність енергоємної компресорної установки. Обмежувачі витрати гасу аеростатичних опор запорошуються, а волога, яка випадає з гасу, що надійшов на піддув, викликає корозію. Цих недоліків позбавлена шпиндельна опора на постійних магнітах. Опори на постійних магнітах довговічні. Розмагнічування магнітів, які виконані з закритичних матеріалів, не перевищує 0,2÷0,5 % за рік. В випадку, якщо магніт піддавався магнітній стабілізації, вдається зменшити незворотне зниження магнітної індукції до сотих часток відсотка. Магнітна індукція може повністю поновлюватися дальшим намагнічуванням. В відношенні піднімальної здатності шпиндельні опори на постійних магнітах з закритичних матеріалів з коерцитивною силою 300÷500 кА/м і індуктивністю 1,5 Тл можуть значно перевищувати аеростатичні шпиндельні опори. Шпиндельна опора на постійних магнітах не споживає газ на піддув опори, а отже, ця опора енергозберігаюча. Задача, що вирішується, полягає у такому удосконаленні шпиндельної опори прототипу, яке передбачає заміну гасового мастильного шару аеростатичної шпиндельної опори магнітним полем силових магнітних підвісів з можливістю управління радіальним положенням вала шпиндельної опори на постійних магнітах. Це досягається тим, що у шпиндельній опорі на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, згідно з винаходом, вал шпиндельної опори виконаний складовим і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, в втулках, установлених в корпусі шпиндельної опори на постійних магнітах, над Б Б Б магнітами вала в перерізах по Б-Б і В-В шпиндельної опори по осях систем координат Х О Y і B B B X O Y установлені по чотири силових магнітних відштовхувача, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран з магнітном'якого матеріалу, п'єзоелектричний двигун, установлений в керамічний ізолятор і регулювальний гвинт, причому постійні магніти силових магнітних відштовхувачів полюсами спрямовані до однойменних полюсів магнітів вала, силові магнітні відштовхувачі і магніти вала, які установлені в одному перерізі опори, утворюють силовий магнітний підвіс вала шпиндельної опори на постійних магнітах, в корпусі шпиндельної опори на постійних магнітах в перерізі по А-А над вихідним А A A A A валом в керамічній втулці по півосях +Х i+Y систем координат X O Y , осі якої паралельні Б Б Б B B B осям систем координат Х О Y і X O Y , установлені датчики положення вала шпиндельної опори на постійних магнітах, пристрій автоматичного управління положенням вала шпиндельної опори на постійних магнітах включає задатчик, перший диференційний підсилювач сигналу неузгодження, другий диференційний підсилювач сигналу неузгодження, перший вимірювач величини зазору, другий вимірювач величини зазору, підсилювачі, вимикач "увімк.-вимк.", п'єзоелектричні двигуни силових магнітних відштовхувачів, причому датчики положення вала шпиндельної опори на постійних магнітах електрично зв'язані з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому вихід задатчика з'єднаний з першими входами першого диференційного підсилювача сигналу неузгодження, другого диференційного підсилювача сигналу неузгодження, датчик положення вала шпиндельної опори на постійних А A A A магнітах, установлений по півосі +Х системи координат X O Y , з'єднаний з першим вимірювачем величини зазору, а його вихід з'єднаний з другим входом першого диференційного підсилювача сигналу неузгодження, перший і другі виходи першого диференційного 1 UA 101907 C2 5 10 15 20 25 підсилювача сигналу неузгодження з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі "увімк.-вимк." з'єднані з п'єзоелектричними двигунами силових магнітних Б В Б Б Б B B B відштовхувачів, установлених по осях Х і X систем координат Х О Y і X O Y , датчик A положення вала шпиндельної опори на постійних магнітах, установлений по півосі +Y системи A A A координат X O Y , з'єднаний з другим вимірювачем величини зазору, а його вихід з'єднаний з другим входом другого диференційного підсилювача сигналу неузгодження, перший і другі виходи другого диференційного підсилювача сигналу неузгодження з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі "увімк.-вимк." з'єднані з п'єзоелектричними Б B двигунами силових магнітних відштовхувані в установлених по осях Y і Y систем координат Б Б Б B B B Х О Y іX O Y . Б Б Б Це досягається також тим, що в перерізах по Б-Б і Г-Г по осях систем координат Х О Y і B B B X O Y установлюють групи паралельно з'єднаних силових магнітних відштовхувачів. Причинно-наслідковий зв'язок технічного рішення, що заявляється, з досягуваним технічним результатом полягає у наступному. На Фіг. 1 представлена шпиндельна опора на постійних магнітах, вал 2, 3, 4 якої складається з несучого вала 2 і співвісно з'єднаними з ним вихідним валом і хвостовиком 4. Всі вали 2, 3, 4 одного діаметра. По краях несучого вала 2 в екранах установлені магніти 8 вала. В корпусі 1 опори в перерізах по Б-Б і В-В над магнітами 8 вала установлені силові магнітні відштовхувачі 11. Їх постійні магніти 9 переміщуються п'єзоелектричними двигунами 13. Полюси магнітів 13 спрямовані до однойменних полюсів магнітів 8 вала. Б - Б. Магніти 13 силових магнітних відштовхувачів 11 установлені з зазором l3 відносно магнітів 8 вала. Як відомо, однойменні полюси магнітів відштовхуються. Розглянемо силу відштовхування між силовим магнітним підштовхувачем 11 і магнітом вала. Магніти 9 силових магнітних відштовхувачів 11 розташовані в екранах 12, які виконані з магнітном'якого матеріалу. Ці екрани 12 являють собою магнітопровід, магнітним потоком поза яким можна знехтувати. Отже, магнітні потоки зосереджені в зазорах між відкритими полюсами магнітів 9 силових магнітних відштовхувачів 11 і магнітами 8 вала опори. Сила відштовхування між силовим магнітним підштовхувачем 11 і магнітом 8 вала розраховується по формулі (Пятин Ю.М., Постоянные магниты. - М.: Энергия, 1980) Fвід 30 BМвідBМвалаSn 2 0 1 2l3 QMl M , де: QM - магнітна жорсткість магнітів 9 силового магнітного відштовхувача і магнітів 8 вала; l3- величина зазору між магнітом відштовхувача і магнітом напрямної; μ 0 - магнітна постійна; BМвід і BМвала - індукції магнітів силового магнітного відштовхувача і магніту вала; l M lМвід lМвала 2 - середня довжина магнітів силового магнітного відштовхувача і магніту 35 вала; Sn - площа полюсів магніту. Площа магніту 8 вала опори дорівнює площі магніту 9 відшювхувача. YБ F ВІД В момент часу, коли різниця сили відштовхування силового магнітного відштовхувача, Б Б Б Б установленого по півосі -Y системи координат Х О Y в перерізі по Б-Б опори, і магніту вала, і YБ Б F ВІД 40 45 50 сила відштовхування силового магнітного відштовхувача, установленого по півосі +Y Б Б Б системи координат Х О Y в перерізі по Б-Б опори і вала - магніту будуть дорівнювати радіальному навантаженню в перерізі по Б-Б шпиндельної опори на постійних магнітах, вал опори буде займати нове положення. При цьому сила відштовхування між цими магнітами при 6 їх намагніченості М=1,592*10 , магнітній індукції 2 Тл, і l3=50 мкм дорівнює 1313 Н. При цих же параметрах магнітів і l3=40 мкм дорівнює 2052 Н. Це означає, що жорсткість одного силового магнітного підвісу дорівнює 73,9 Н/мкм. Для запобігання радіального зміщення вала шпиндельної опори на постійних магнітах вона оснащається пристроєм управління положенням вала опори. Цей пристрій шляхом зміни величин зазорів між магнітом 8 вала і магнітами 9 силових магнітних відштовхувачів п'єзоелектричними двигунами 13 відштовхувачів постійно компенсує радіальне навантаження на вал опори і запобігає його зміщення. 2 UA 101907 C2 5 10 15 20 25 30 35 40 45 50 55 60 Сила відштовхування між магнітом 8 вала і магнітними силовими відштовхувачами визначається їх магнітними індукціями, площиною полюсів, середньою довжиною і зазором між ними. Винахід пояснюється кресленнями. Фіг. 1 Шпиндельна опора на постійних магнітах (осьовий переріз). Фіг. 2. Силові магнітні підвіси в перерізах по Б-Б і В-В опори. Фіг. 3. Датчики величин зазорів в перерізах А-А опори. Фіг. 4. Функціональна схема пристрою автоматичного управління положенням вала шпиндельної опори на постійних магнітах. Фіг. 5. Силові магнітні підвіси утворені групами силових магнітних відштовхувачів в перерізах по Б-Б і В-В опори. Шпиндельна опора на постійних магнітах (Фіг.1) включає корпус 1 і складовий вал 2, 3, 4 шпиндельної опори на постійних магнітах, який складається з несучого вала 2 і співвісно з'єднаними з ним і одного з ним діаметра вихідним валом 3 і хвостовиком 4. В корпусі 1 шпиндельної опори в керамічних втулках 5 в перерізі по А - А опори по півосях А A A A A +Х і + Y системи координат X O Y (Фіг. 3) установлені датчики 6 положення вала шпиндельної опори. Керамічні втулки 5 є ізоляторами датчиків 6, а також послабляють дію стороннього магнітного поля на ці датчики. Датчики 6 положення вала шпиндельної опори служать для вимірювання величин зазорів між основами датчиків 6 і вихідним валом 3 для забезпечення стабілізації радіального положення вала 2, 3, 4 шпиндельної опори на постійних магнітах. По краях несучого вала 2 в ізоляторах 7 установлені магніти 8 вала, які виготовлені у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях. Екран 7 виконаний з магнітном'якого матеріалу (пермюндера) (Пятин Ю.М. Постоянные магниты: Справочник. - М.: Энергия, 1980) з високою магнітною проникливістю (μr≥60000), високою індукцією насичення (Br f 10 Тл) і забезпечують концентрацію магнітного поля між магнітами 8 вала і магнітами 9 силових магнітних відштовхувачів 11, а також перешкоджають проникненню магнітних потоків розсівання в вихідний вал 3 і далі під датчики 6 величин зазорів. В перерізах по Б-Б і В-В шпиндельної опори в втулках 10 установлені силові магнітні відштовхувачі 11 з керованою силою відштовхування між цими відштовхувачами 11 і магнітами 8 вала. Кожний силовий магнітний відштовхувач 11 включає магніт 9, виконаний з закритичного магнітного матеріалу, наприклад, фериту або рідкоземельного магнітного матеріалу з 3 коеринтивною силою Нс до 400 kA/м і енергією до 25000 Дж/м . Такі магніти не зазнають розмагнічування в сильних магнітних полях (Пятин Ю.М. Постоянные магниты: Справочник. М.: Энергия, 1980). Магніти 9 силових магнітних відштовхувачів установлені в екрани 12, які виконані з магнітном'якого матеріалу, що також забезпечує зосередження їх магнітного потоку в зазорах між магнітом 8 вала і цими магнітами 9. Переміщення магнітів 9 здійснюється п'єзоелектричними двигунами 13. П'єзоелектричні двигуни 13 установлені в ізолятори 14. Регулювальний гвинт 15 служить для установки початкової величини зазору між магнітом 9 силового магнітного відштовхувача і магнітом 8 вала, а отже, для установки між ними початкової сили відштовхування. Магніти 9 і магніти 8 вала спрямовані один до одного однойменними полюсами. Б Б Б B B B В перерізах опори по Б-Б і В-В по осях систем координат X O Y і X O Y (фіг. 2) установлені по чотири силових магнітних відштовхувача, які в цих перерізах вала з магнітами 8 Б Б Б B B B вала утворюють силові магнітні підвіси 16. При цьому осі систем координат X O Y і X O Y A A A паралельні осям системи координат X O Y . Силові магнітні підвіси 16: - утримують вал 2, 3, 4 опори у виваженому стані; - запобігають зміщенню вала 2, 3, 4 опори з заданого положення під дією радіального навантаження. Пристрій 17 автоматичного управління положенням вала шпиндельної опори на постійних магнітах (Фіг. 4) включає задатчик 18, який служить для установки заданої величини зазорів під А A A A A датчиками 6 величин зазорів, установлених по півосях +Х і + Y системи координат X O Y в перерізі по А-А опори (Фіг. 3). З виходу задатчика 18 сигнал надходить на перші входи першого диференційного підсилювача 19 сигналу неузгодження, другого диференційного підсилювача 20 сигналу неузгодження. Диференційні підсилювачі 19 і 20 виробляють сигнали неузгодження, які пропорційні величинам зазорів під відповідним датчиком 6 положення вала від заданих задатчиком 18 3 UA 101907 C2 5 10 15 20 25 30 35 40 45 50 55 60 величин цих зазорів. Сигнали датчиків 6 положення вала опори надходять на входи першого вимірювача 21 величини зазору і другого вимірювача 22 величини зазору. Сигнали вимірювачів 21 і 22 надходять на другі входи диференційних підсилювачів 19 і 20 сигналів неузгодження, відповідно. Як вимірювачі величин зазорів використовуються вимірювачі мікропереміщень, 3 4 погрішність вимірювання яких не перевищує 10- ÷10- величини зазору, який вимірюється (Гриневич Б.Ф. Измерительные компенсационно - мостовые устройства с емкостными датчиками. - Киев.: Наукова Думка, 1987). З виходів першого диференційного підсилювача 19 сигналу неузгодження сигнал надходить на входи підсилювачів 23 і 24, а з їх виходів через вимикач 25 - на п'єзоелектричні двигуни 13 Б Б В В силових магнітних відштовхувачів, установлених по півосях +Х і -Х , +Х і -Х систем координат Б Б Б B B B X O Y і X O Y . П'єзоелектричні двигуни 13 силових магнітних відштовхувачів 11, які установлені по одній осі систем координат, живляться в протифазі. В залежності від напрямку зміни величини зазору магніт 9 одного з силових магнітних відштовхувачів наближається до магніту 8 вала і збільшує силу відштовхування, а другого - віддаляється від магніту 8 вала і зменшує силу відштовхування. В результаті по цій осі координат під дією сил відштовхування вал 2, 3, 4 займе задане положення. З виходів другого диференційного підсилювача 20 сигналу неузгодження сигнал надходить на входи підсилювачів 26 і 27, а з їх виходів через вимикач 25 - на п'єзоелектричні двигуни 13 Б Б B B силових магнітних відштовхувачів 11, установлених по півосях +Y і -Y , +Y і -Y систем Б Б Б B B B координат X O Y і X O Y . 28 - планшайба, яка установлена на вихідному валу 4. При цьому вихід задатчика 18 з'єднаний з першими входами першого диференційного підсилювача 19 сигналу неузгодження і другого диференційного підсилювача 20 сигналу неузгодження, датчик 6 положення вала шпиндельної опори на постійних магнітах, А A A A установлений по півосі +Х системи координат X O Y , з'єднаний з першим вимірювачем 21 величини зазору, а його вихід з'єднаний з другим входом першого диференційного підсилювача 19 сигналу неузгодження, перший і другі виходи першого диференційного підсилювача 19 сигналу неузгодження з'єднані з входами підсилювачів 23 і 24, виходи підсилювачів 23 і 24 через вимикачі 25 "увімк.-вимк." з'єднані з п'єзоелектричними двигунами 13 силових магнітних Б B Б Б Б B B B відштовхувачів 11, установлених по осях Х і X систем координат X O Y і X O Y датчик 6 A положення вала шпиндельної опори на постійних магнітах, установлений по півосі +Y системи A A A координат X О Y , з'єднаний з другим вимірювачем 22 величини зазору, а його вихід з'єднаний з другим входом другого диференційного підсилювача 20 сигналу неузгодження, перший і другі виходи другого диференційного підсилювача 20 сигналу неузгодження з'єднані з входами підсилювачів 26 і 27, виходи підсилювачів 26 і 27 через вимикачі 25 "увімк.-вимк." з'єднані з Б п'єзоелектричними двигунами 13 силових магнітних відштовхувачів 11, установлених по осях Y B Б Б Б B B B і Y систем координат X O Y і X O Y . Працює шпиндельна опора на постійних магнітах наступним чином. Вимикачі 25 "увімк. вимк." установлюють в положення "увімк." і підключають вимірювачі 23, 24, 26, 27 до п'єзоелектричних двигунів 13 силових магнітних відштовхувачів 11. Пара п'єзоелектичних двигунів 13 силових магнітних відштовхувачів, установлених по одній осі координат, зустрічно підключена до відповідних п'єзоелектричних двигунів. На виході задатчика 18 установлюють напругу, яка дорівнює вихідним напругам вимірювачів 21 і 22 при розрахунковій величині зазору під датчиками 6 положення вала 2, 3, 4 шпиндельної опори. По показаннях вимірювачів 21 і 22 величин зазорів зміщують регулювальними гвинтами 15 магніти 8 силових магнітних відштовхувачів 11, а отже, і вал 2, 3, 4 опори, під датчиками 6 положення вала опори, установлених в перерізі по А-А опори, установлюють розрахункові величини зазорів. Нехай під дією радіального навантаження зазор під датчиком 6 положення вала опори, А A A A установленого по півосі +Х системи координат X O Y в перерізі по А-А шпиндельної опори на постійних магнітах опори стане більшим. Отже, збільшиться напруга на другому вході диференціального підсилювача 19. В результаті на виході диференційного підсилювача 19 виникає різниця потенціалів. Напруга з виходів диференційного підсилювача 19 через підсилювачі 23 і 24 надходить на п'єзоелектричні двигуни 13 силових магнітних відштовхувачів Б B Б Б Б B B B 11, установлених по осях Х і X систем координат X O Y і X O Y в перерізах по Б-Б і В-В опори. В результаті п'єзоелектричні двигуни 13 силових магнітних відштовхувачів 11, установлених Б В по півосях -Х і -Х подовжується. Зазори між магнітом 8 вала і магнітами 9 силових магнітних відштовхувачів зменшується, а отже, сила відштовхування між ними збільшується. 4 UA 101907 C2 5 10 П'єзоелектричні двигуни 13 силових магнітних відштовхувачів 11, установлених по півосях Б В +Х і +Х укорочуються. Зазори між магнітами 8 вала і магнітами 9 силових магнітних відштовхувачів збільшуються, а сила відштовхування між ними зменшується. Б В Під дією сил відштовхування вал 2, 3, 4 опори зміститься в напрямку півосей +Х і +Х і буде займати початкове положення. Для підвищення піднімальної сили і жорсткості шпиндельної опори на постійних магнітах в Б Б Б B B B перерізах опори по Б-Б і В-В по осях систем координат X O Y і X O Y можуть встановлюватися по чотири групи (Фіг. 5) установлюються по чотири групи 29, 30, 31, 32, 33, 34, 35, 36 паралельно підключених силових магнітних відштовхувачів, які з магнітами 8 вала утворюють силові магнітні підвіси. Кожну групу силових магнітних відштовхувачів установлюють симетрично відносно осей Б Б Б B B B згаданих систем координат X O Y і X O Y . ФОРМУЛА ВИНАХОДУ 15 20 25 30 35 40 45 1. Шпиндельна опора на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, яка відрізняється тим, що вал шпиндельної опори виконаний складовим і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, у втулках, установлених в корпусі шпиндельної опори на постійних магнітах, над магнітами вала шпиндельної опори по осях прямокутної систем координат установлені по чотири силових магнітних відштовхувача, кожний силовий магнітний відштовхувач включає постійний магніт, установлений в екран з магнітном'якого матеріалу, п'єзоелектричний двигун, установлений в керамічний ізолятор, і регулювальний гвинт, причому постійні магніти силових магнітних відштовхувачів полюсами спрямовані до однойменних полюсів магнітів вала, силові магнітні відштовхувачі і магніт вала, які установлені в одному перерізі опори, утворюють силовий магнітний підвіс вала шпиндельної опори на постійних магнітах, в корпусі шпиндельної опори на постійних магнітах в керамічній втулці по півосях систем прямокутних координат, осі якої паралельні осям систем координат, по яких установлені силові магнітні відштовхувачі і установлені датчики положення вала шпиндельної опори на постійних магнітах, пристрій автоматичного управління положенням вала шпиндельної опори на постійних магнітах включає задатчик, перший диференційний підсилювач сигналу неузгодження, другий диференційний підсилювач сигналу неузгодження, перший вимірювач величини зазору, другий вимірювач величини зазору, підсилювачі, вимикач "увімк.-вимк.", п'єзоелектричні двигуни силових магнітних відштовхувачів, причому датчики положення вала шпиндельної опори на постійних магнітах електрично зв'язані з п'єзоелектричними двигунами силових магнітних відштовхувачів, причому вихід задатчика з'єднаний з першими входами першого диференційного підсилювача сигналу неузгодження, другого диференційного підсилювача сигналу неузгодження, датчики положення вала шпиндельної опори на постійних магнітах з'єднані з вимірювачами величини зазору, а їх виходи з'єднані з другими входами першого і другого диференційних підсилювачів сигналу неузгодження, перший і другі виходи першого і другого диференційних підсилювачів сигналу неузгодження з'єднані з входами підсилювачів, виходи підсилювачів через вимикачі "увімк.-вимк." з'єднані з п'єзоелектричними двигунами силових магнітних відштовхувачів. 2. Шпиндельна опора на постійних магнітах за п. 1, яка відрізняється тим, що по осях прямокутних систем координат над магнітами вала встановлені групи паралельно з'єднаних силових магнітних відштовхувачів. 5 UA 101907 C2 6 UA 101907 C2 7 UA 101907 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюSpindle bearing on permanent magnets
Автори англійськоюHrytsenko Volodymyr Illich, Tarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюШпиндельная опора на постоянных магнитах
Автори російськоюГриценко Владимир Ильич, Тарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: магнітах, опора, постійних, шпиндельна
Код посилання
<a href="https://ua.patents.su/10-101907-shpindelna-opora-na-postijjnikh-magnitakh.html" target="_blank" rel="follow" title="База патентів України">Шпиндельна опора на постійних магнітах</a>
Шпиндельна опора на постійних магнітах
Номер патенту: 72699
Опубліковано: 27.08.2012
Автори: Тарасов Віктор Олексійович, Гриценко Володимир Ілліч, Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: шпиндельна, постійних, опора, магнітах
Формула / Реферат:
1. Шпиндельна опора на постійних магнітах, яка включає датчики положення вала опори, силові магнітні відштовхувачі, пристрій автоматичного управління положенням вала опори, яка відрізняється тим, що вал шпиндельної опори виконаний складеним і включає вихідний вал, несучий вал і хвостовик, по краях несучого вала в екранах установлені магніти вала у вигляді порожнистого циліндра з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Суміщена шпиндельна опора на постійних магнітах
Номер патенту: 72698
Опубліковано: 27.08.2012
Автори: Гриценко Володимир Ілліч, Зіненко Володимир Миколайович, Тарасов Віктор Олексійович
МПК: F16C 32/06
Мітки: суміщена, опора, шпиндельна, постійних, магнітах
Формула / Реферат:
Суміщена шпиндельна опора на постійних магнітах, яка включає силові магнітні підвіси, датчики величин зазорів, балансуючі вантажі, опори кочення, блок вибору незміщеного положення і балансування вала суміщеної шпиндельної опори на постійних магнітах, яка відрізняється тим, що вал суміщеної шпиндельної опори на постійних магнітах виконаний складеним з трьох співвісно установлених валів одного діаметра, на середньому валу по його краях в...
Суміщена шпиндельна опора на постійних магнітах
Номер патенту: 101906
Опубліковано: 13.05.2013
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович, Гриценко Володимир Ілліч
МПК: F16C 32/04
Мітки: опора, постійних, магнітах, шпиндельна, суміщена
Формула / Реферат:
Суміщена шпиндельна опора на постійних магнітах, яка включає силові магнітні підвіси, датчики величин зазорів, балансуючі вантажі, опори кочення, блок вибору незміщеного положення і балансування вала суміщеної шпиндельної опори на постійних магнітах, яка відрізняється тим, що вал суміщеної шпиндельної опори на постійних магнітах виконаний складовим з трьох співвісно установлених валів одного діаметра, на середньому валу по його краях в...
Підп’ятник на постійних магнітах
Номер патенту: 77947
Опубліковано: 11.03.2013
Автори: Зіненко Володимир Миколайович, Тарасов Віктор Олексійович, Гриценко Володимир Ілліч
МПК: F16C 32/06, F16C 32/04
Мітки: постійних, магнітах, підп'ятник
Формула / Реферат:
1. Підп'ятник на постійних магнітах, що містить магнітний силовий підвіс, датчик положення вала, пристрій автоматичного управління осьовим положенням вала, який відрізняється тим, що магнітний силовий підвіс містить по чотири силових магнітних відштовхувачі в кожному лівому та правому підп'ятниках, п'яту, яка установлена між правим та лівим підп'ятниками і складається з диска, екранів і установленого між екранами магніту п'яти, причому диск...
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах
Номер патенту: 72700
Опубліковано: 27.08.2012
Автори: Зіненко Володимир Миколайович, Тарасов Віктор Олексійович, Гриценко Володимир Ілліч
МПК: F16C 32/06
Мітки: опори, радіальної, магнітах, балансування, пристрій, шпиндельної, постійних, вала
Формула / Реферат:
Пристрій балансування вала радіальної шпиндельної опори на постійних магнітах, який включає датчики величин зазорів, вимірювачі величин зазорів, обчислювач, який відрізняється тим, що включає складений вал шпиндельної опори, який складається з трьох співвісно встановлених валів, на кінцях середнього вала в екранах встановлені постійні магніти вала у вигляді порожнистих циліндрів з полюсами на внутрішній і зовнішній бокових поверхнях, в...
Попередній патент: Суміщена шпиндельна опора на постійних магнітах
Наступний патент: Спосіб виробництва товстолистового прокату для виготовлення електрозварних нафтогазопровідних труб
Випадковий патент: Спосіб одержання залеплону