Привод велосипеда
Номер патенту: 102760
Опубліковано: 12.08.2013
Автори: Дорожко Олександр Іванович, Дорожко Наталья Олександрівна
Формула / Реферат
Привод велосипеда із зворотно-поступально рухомими важелями, що містить корпус, механізм синхронізації, який складається з трьох конічних шестерень, вал привода та обгінні муфти, який відрізняється тим, що перший зворотно-поступальний рухомий важіль педалей зміщений від верхньої точки положення педалей у бік робочого ходу на кут 0° < a ≤ 30°, другий зворотно-поступальний рухомий важіль педалей зміщений - на кут 180°-a, а довжина кожного важеля збільшена в 1/cos30° разів, при цьому хід зворотно-поступально рухомих важелів педалей дорівнює куту 180°-2a, обмеженому корпусом, який додатково містить другий вал привода, при цьому на кожному валу привода закріплені важіль педалі, конічна шестірня та обгінна муфта, яка заклинюється у бік робочого ходу, причому зовнішні обойми обгінних муфт є циліндричними шестернями, які через проміжні циліндричні шестерні і вали, на яких вони встановлені, пов'язані з ведучою зірочкою привідного ланцюга.
Текст
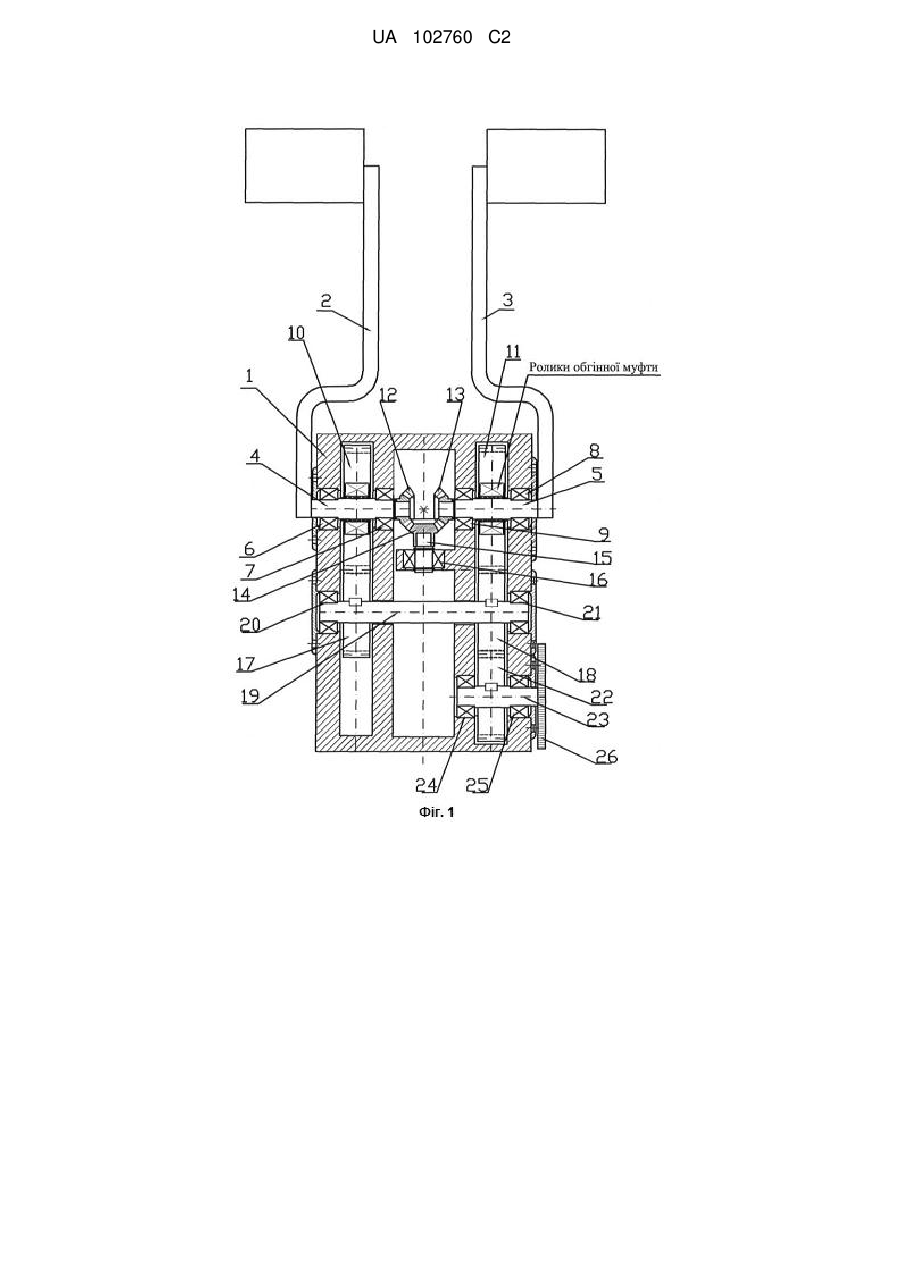
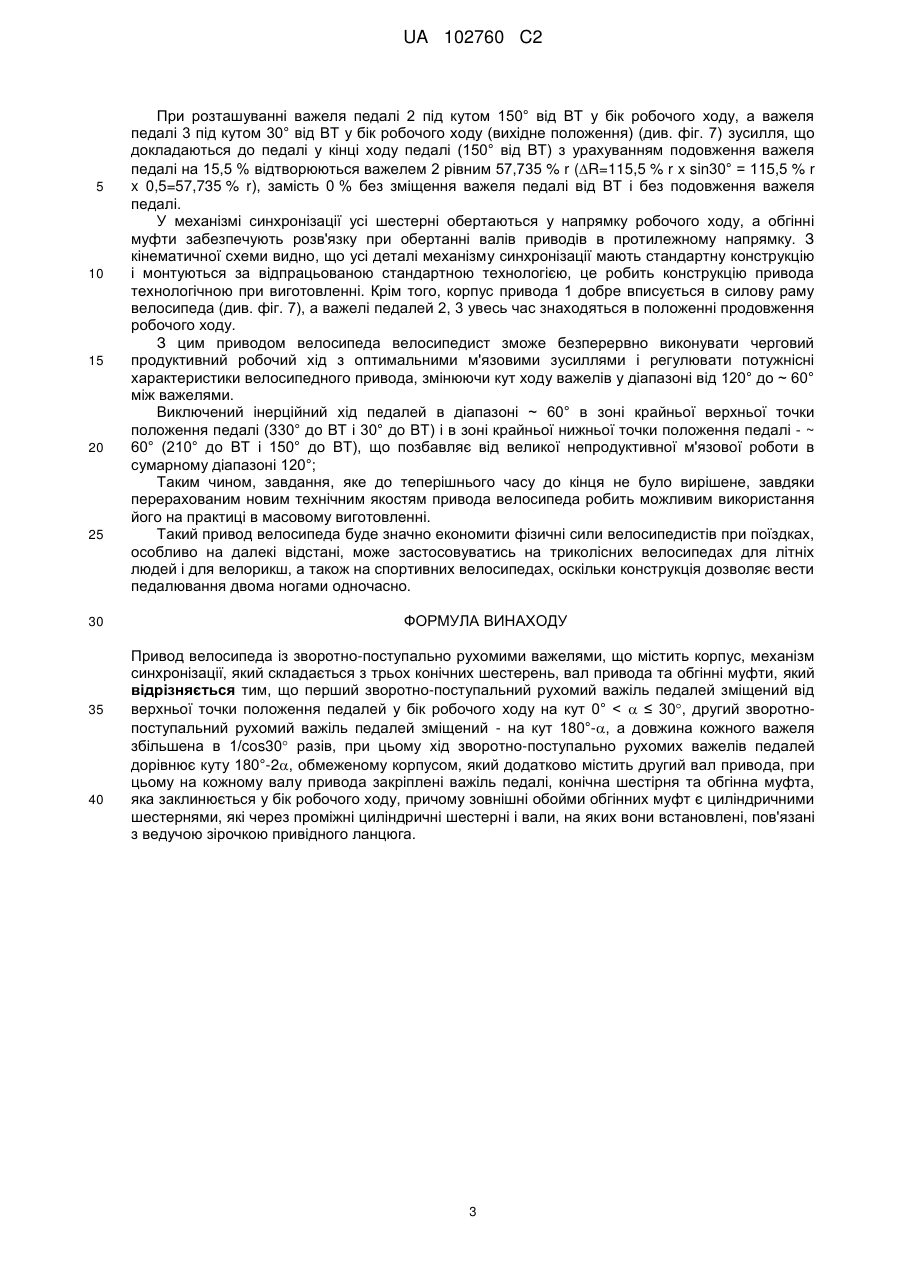
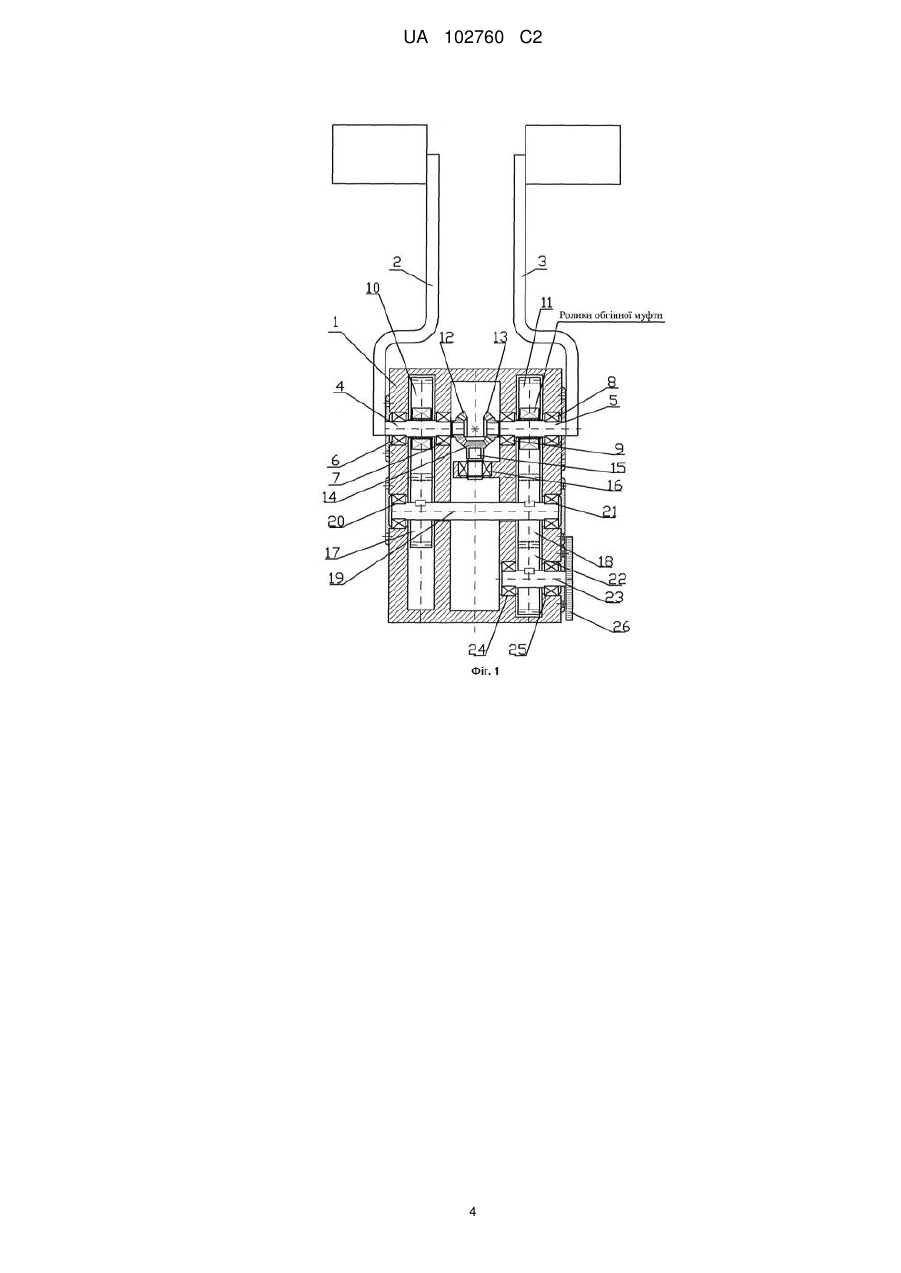
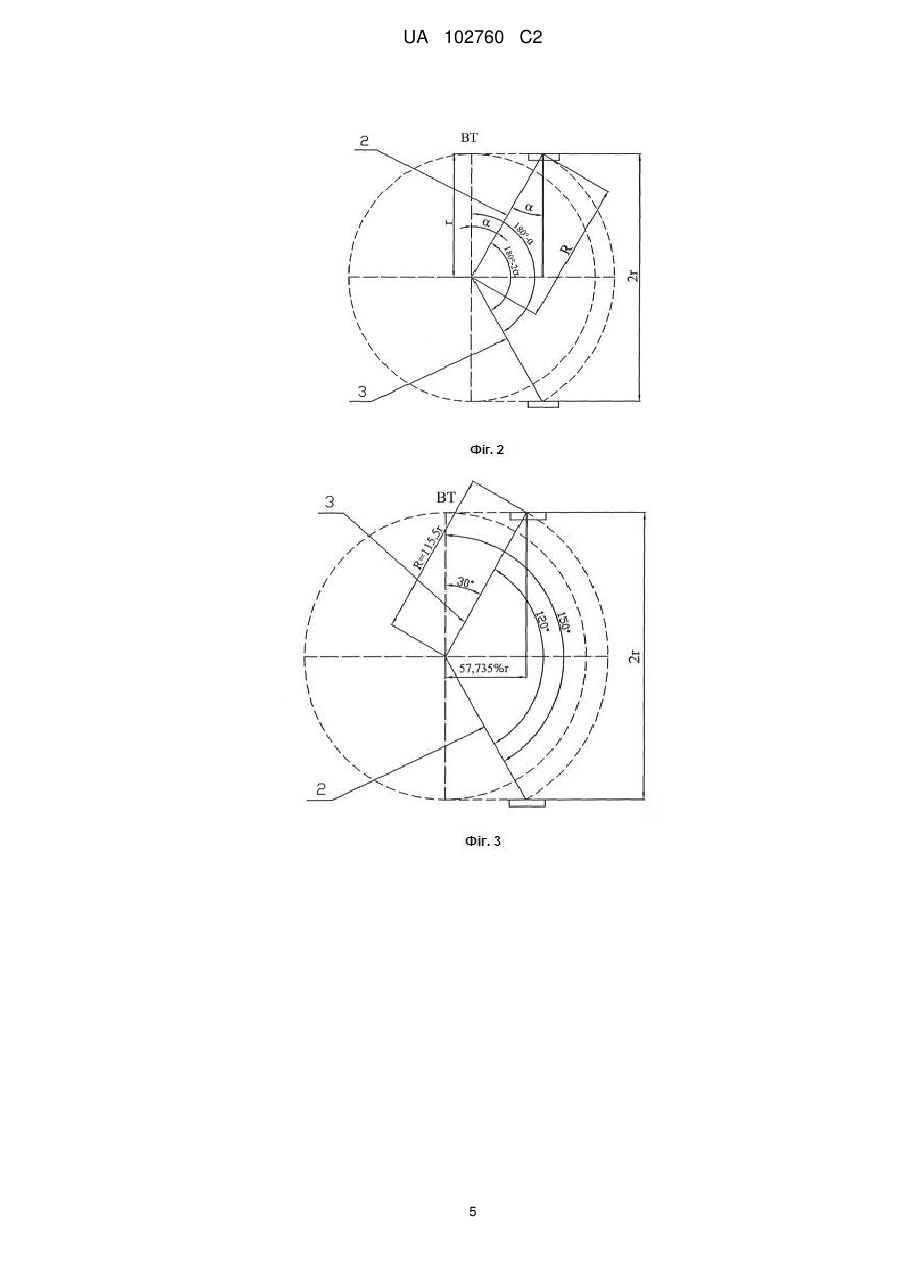
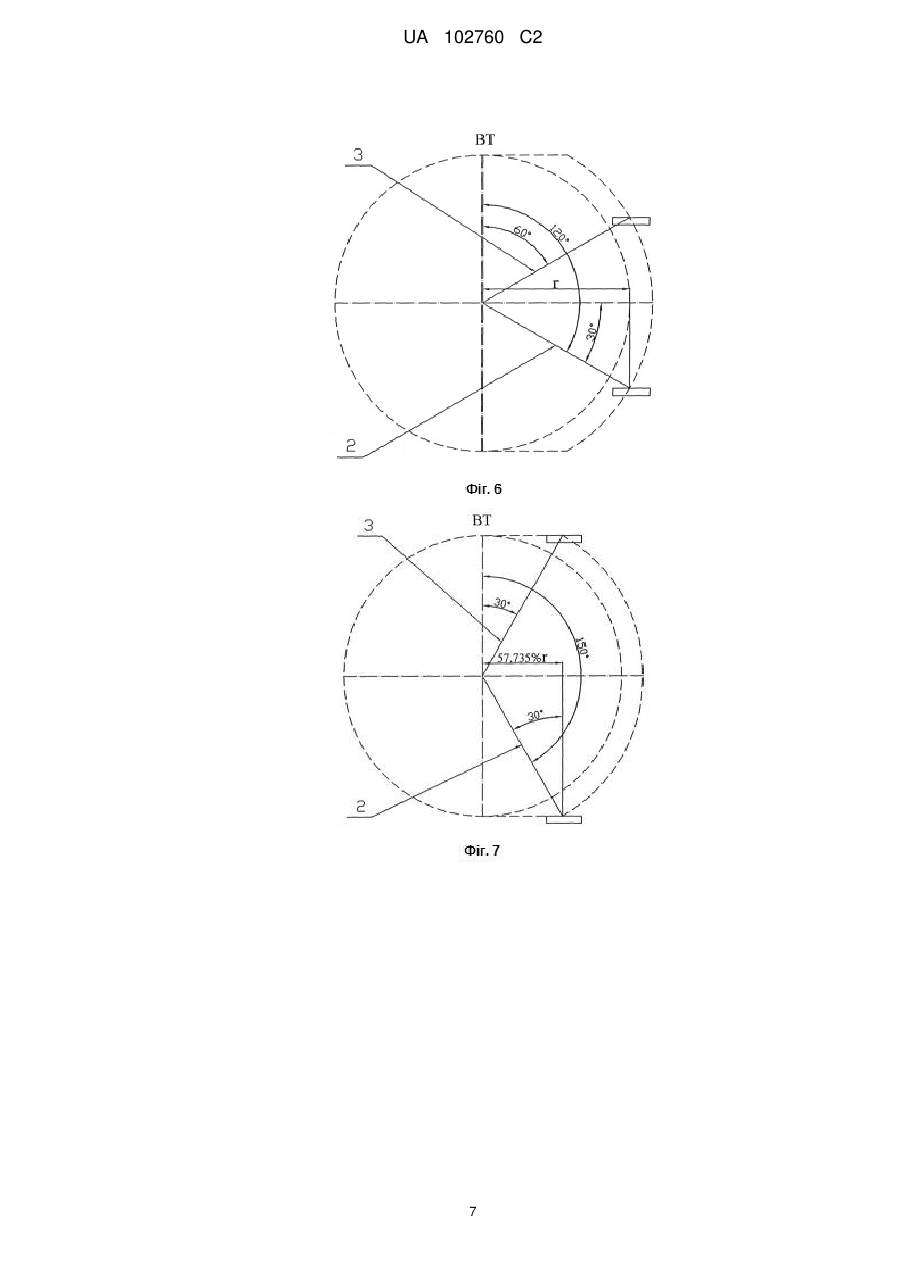
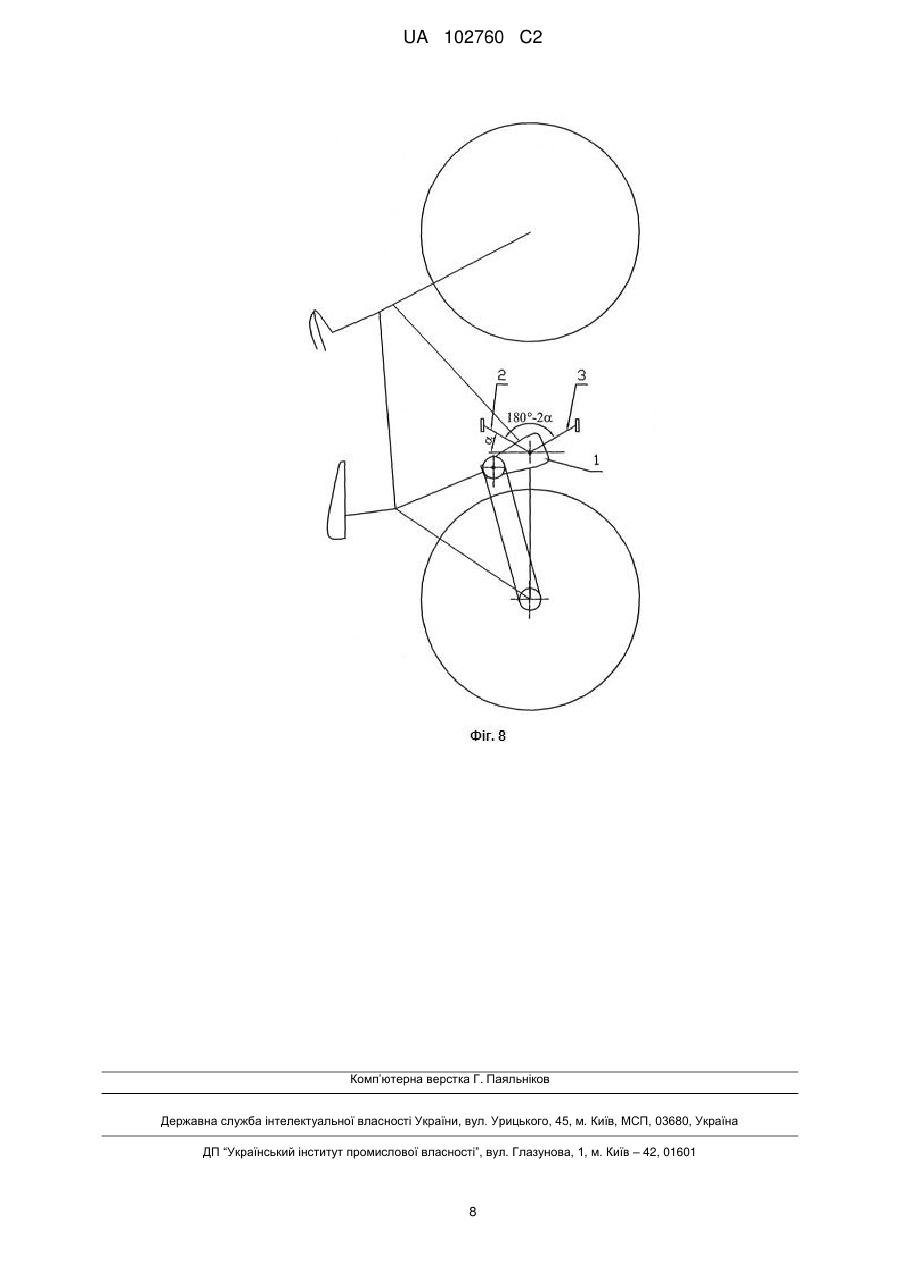
Реферат: Заявлений привод велосипеда із зворотно-поступально рухомими важелями містить корпус, механізм синхронізації, який складається з трьох конічних шестерень, вал привода та обгінні муфти. Перший зворотно-поступальний рухомий важіль педалей зміщений від верхньої точки положення педалей у бік робочого ходу. Другий зворотно-поступальний рухомий важіль педалей зміщений у протилежний бік робочому ходу. Довжина кожного важеля збільшена. Корпус додатково містить другий вал привода. На кожному валу привода закріплені важіль педалі, конічна шестірня та обгінна муфта, яка заклинюється у бік робочого ходу. Зовнішні обойми обгінних муфт є циліндричними шестернями, які через проміжні циліндричні шестерні і вали, на яких вони встановлені, пов'язані з ведучою зірочкою привідного ланцюга. UA 102760 C2 (12) UA 102760 C2 UA 102760 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі машинобудування і може бути використаний у велосипедному транспорті. Відомий привод велосипеда [а. с. СРСР № 592661 22.01.75 МПК В 62М 1/04], що містить корпус, механізм синхронізації, який складається з трьох конічних шестерень вала привода, який проходить усередині двох конічних шестерень, та обгінні муфти, які установленні на валу і кінематично пов'язані із маточинами важелів і винесені за межі корпусу, при цьому ведучі частини обгінних муфт виконані одним цілим з важелями. Недоліком відомого привода велосипеда є те, що на валу привода встановлені підшипники, на які встановлені дві конічні шестерні, а на хвостовиках цих шестерень встановлені другим ярусом підшипники, що утримують в корпусі привода механізм синхронізації. Така кінематична схема складна, не технологічна у виготовленні та в експлуатації, призводить до значного збільшення розмірів двох конічних шестерень, збільшення габаритів корпусу привода, знижує надійність роботи привода велосипеда. Крім того, ця конструкція не позбавляє від безплідної м'язової роботи в зонах верхньої і нижньої точок положення педалей велосипеда. Задача винаходу - розробити конструкцію привода велосипеда із спрощеною кінематичною схемою і, як наслідок, більш надійною, технологічною, придатною для масового виготовлення, зручною в експлуатації і такою, що забезпечує більш ефективне використання мускульної сили. Поставлена задача вирішується тим, що в приводі велосипеда з зворотно-поступально рухомими важелями, що містить корпус, механізм синхронізації, який складається з трьох конічних шестерень, вал привода та обгінні муфти, відповідно до винаходу кожен з зворотнопоступально рухомих важелів педалей зміщений від верхньої точки (ВТ) положення педалей у бік робочого ходу на кут α, а його довжина збільшена в 1/cosα разів, а хід зворотно-поступально рухомих важелів педалей дорівнює куту 180°-2α, обмеженому корпусом, який додатково містить другий вал привода, на кожному валу привода закріплені важіль педалі, конічна шестірня та обгінна муфта, яка заклинюється у бік робочого ходу, крім того, зовнішні обойми обгінних муфт є циліндричними шестернями, які через проміжні циліндричні шестерні і вали, на яких вони встановлені, пов'язані з ведучою зірочкою привідного ланцюга. Така кінематична схема має наступні істотні відмітні ознаки: Кожен із зворотно-поступально рухомих важелів педалей зміщений від верхньої точки положення педалей у бік робочого ходу на кут , а його довжина збільшена в 1/cosα разів. Хід зворотно-поступально рухомих важелів педалей обмежений в діапазоні 180°-2 корпусом. У корпусі встановлено додатково другий вал привода. На кожному валу привода закріплені важіль педалі, конічна шестірня і обгінна муфта, яка заклинюється у бік робочого ходу. Зовнішні обойми обгінних муфт є циліндричними шестернями, які через проміжні циліндричні шестерні і вали, на яких вони встановлені, пов'язані з ведучою зірочкою привідного ланцюга. Істотні відмітні ознаки в сукупності з відомими ознаками дозволяють спростити кінематичну схему і, як наслідок, підвищити надійність, крім того, кінематична схема стає технологічною у виготовленні та придатною для масового виготовлення, зручною в експлуатації і такою, що забезпечує ефективніше використання мускульної сили. Винахід пояснюється описом та кресленнями: на фіг. 1 показаний загальний вигляд кінематичної схеми привода велосипеда; на фіг. 2 показані важелі педалі 2, 3 в положенні і 180°- від ВТ. на фіг. 3 показані важелі педалі 2, 3 в положенні 30° і 150° від ВТ. на фіг. 4 показані важелі педалі 2, 3 в положенні 60° і 120° від ВТ; на фіг. 5 показані важелі педалі 2, 3 в положенні 90° від ВТ; на фіг. 6 показані важелі педалі 2, 3 в положенні 120° і 60° від ВТ; на фіг. 7 показані важелі педалі 2, 3 в положенні 150° і 30° від ВТ; на фіг. 8 показано розташування привода 1 на рамі велосипеда. Привод велосипеда складається з корпусу 1 (див фіг. 1), в якому розташований механізм синхронізації. Механізм синхронізації має два важелі педалей 2, 3, які в вихідному положенні зміщені (див фіг. 2) у вертикальній площині від верхньої точки (ВТ) положення педалей у бік робочого ходу. Важіль педалі 2 зміщений на кут , важіль педалі 3 зміщений на кут 180°-. Таким чином, кут ходу кожного важеля педалей складає 180°-2. Кожен важіль подовжений і дорівнює R=r/cosα, отже, лінійна амплітуда ходу педалей, встановлених на важелях 2, 3 дорівнює 2r. Проекція важеля педалі 2 на горизонтальну вісь складає ΔR=R/sin. Важелі педалей 2, 3 закріплені на двох валах приводах 4, 5, відповідно (див фіг. 1), які встановлені на підшипниках 6, 7, 8, 9, закріплених в корпусі привода велосипеда 1. На валу привода 4 закріплені: конічна шестірня 12 1 UA 102760 C2 5 10 15 20 25 30 35 40 45 50 55 і обгінна муфта 10. На валу привода 5 закріплені: конічна шестірня 13 і обгінна муфта 11. Конічні шестерні 12, 13 входять в зачеплення з проміжною конічною шестірнею 14, яка закріплена на валу 15. Вал 15 встановлений на підшипнику 16, який закріплений в корпусі привода велосипеда 1. Зовнішні обойми обгінних муфт 10, 11 є циліндричними шестернями. Циліндричні шестерні обгінних муфт 10, 11 входять в зачеплення з проміжними циліндричними шестернями 17, 18, які закріплені на валу 19. Вал 19 встановлений на підшипниках 20, 21, які закріплені в корпусі привода велосипеда 1. Проміжна циліндрична шестірня 18 входить в зачеплення з циліндричною шестірнею 22, яка закріплена на валу 23. На валу 23 закріплена провідна зірочка привода велосипеда 26, а вал встановлений на підшипниках 24, 25, які закріплені в корпусі привода велосипеда 1. Роботу механізму синхронізації привода велосипеда наочніше розглядати в динаміці, використовуючи як приклад певні дискретні моменти руху важеля педалі 2, який впродовж робочого ходу проходить положення: початкове 30° від ВТ у бік робочого ходу, 60° від ВТ у бік робочого ходу, 90° від ВТ у бік робочого ходу, 120° від ВТ у бік робочого ходу і кінцеве 150° від ВТ у бік робочого ходу. Одночасно важіль педалі 3 переміщується у бік холостого ходу через точки 150°, 120°, 90°, 60°, і повертається в початкове положення, 30° від ВТ. На цьому прикладі цикл роботи привода велосипеда має: робочий хід 120° і холостий хід 120° кожного важеля педалі. Запропонований приклад положення певних дискретних моментів руху дозволяє побачити переваги технічного рішення перед прототипом. Припустимо, що в початковому положенні важіль педалі 2 зміщений від ВТ у бік робочого ходу на кут 30° (див фіг. 3), а важіль педалі 3 зміщений від ВТ у бік робочого ходу на кут 180° 30° = 150°. Кут ходу кожного важеля педалей складає 180° - 60° = 120°. Для забезпечення лінійної амплітуди ходу педалей рівної 2r, кожен важіль подовжений і дорівнює (R=100 % r / cos 30° =100 % r / 0,866=115,5 % r). Зусилля, докладені до педалі на початку ходу важеля педалі 2 з урахуванням зміщення і подовження важеля педалі, відтворюються значно ефективніше 57,735 % r (R=115,5 % r x sin30°=115,5 % r x 0,5=57,735 % r), замість 0 % r без подовження важеля педалі і без зміщення важеля педалі від ВТ. При виконанні робочого ходу важелем педалі 2, зусилля передаються через вал привода 4 (див. фіг. 1) на обгінну муфту 10 і вона провертається разом з шестірнею зовнішньої обойми, оскільки обгінна муфта встановлена заклиненням у бік робочого ходу. Одночасно вал привода 4 передає зусилля на вал привода 5 через конічні шестерні 12, 13, 14, які передають зусилля у зворотному напрямі робочого ходу. Вал привода 5 переміщує важіль педалі 3 в зону 30° від ВТ у бік робочого ходу, і важіль педалі 3 приймає початкове положення. У цей час обгінна муфта 11 не перешкоджає обертанню вала привода 5, оскільки він обертається навпроти робочого ходу, а в цьому випадку обгінна муфта знаходиться в положенні розклинення. При виконанні робочого ходу важелем педалі 3 важіль педалі 2 повертається в початкове положення. Отже, важелі педалей 2, 3 і обгінні муфти 10, 11 здійснюють знакозмінні рухи. У обгінних муфтах 10, 11 t розклинення менше, ніж t заклинення, тому така технічна характеристика обгінних муфт забезпечує надійну роботу привода велосипеда у будь-яких швидкісних режимах. Циліндричні шестерні обгінних муфт 10, 11 знаходяться в зачепленні і по черзі передають зусилля обертання в робочому напрямі проміжним шестерням 17, 18, які закріплені на валу 19. Вал 19 встановлений на підшипниках 20, 21 які посаджені в корпус привода 1. Проміжна шестірня 18 знаходиться в зачепленні і передає зусилля обертання шестірні 22, яка закріплена на валу 23, і через вал 23 передає зусилля обертання ведучій зірочці привода велосипеда, яка закріплена на валу 23. Вал 23 встановлений на підшипниках 24, 25, які посаджені в корпусі 1. При розташуванні важеля педалі 2 під кутом 60° від ВТ у бік робочого ходу, а важеля педалі 3 під кутом 120° від ВТ у бік холостого ходу, (див фіг. 4), проекція важеля педалі 2 складе R=115,5 % r x cos 30° = 115,5 % r х 0,866=100 % r. Отже, в цьому положенні важелів педалі зусилля, які докладаються до педалі та відтворюються важелем 2 рівним 100 % r, замість 86,6 % r без зміщення і подовження важеля педалі. При розташуванні важелів педалей 2, 3 під кутом 90° від ВТ у бік робочого ходу (див фіг. 5), зусилля, що докладаються до педалі, відтворюються важелем 2 рівним 115,5 % r, замість 100 % r без зміщення і подовження важеля педалі. При розташуванні важеля педалі 2 під кутом 120° від ВТ у бік робочого ходу, (див. фіг. 6), а важеля педалі 3 під кутом 60° від ВТ у бік робочого ходу, проекція важеля педалі 2 на горизонтальну вісь складе - R=115,5 % r x cos 30° = 115,5 % r х 0,866=100 % r. Отже, в цьому положенні важелів педалі зусилля, що докладаються до педалі, відтворюються важелем 2 рівним 100 % r, замість 86,6 % r без зміщення і подовження важеля педалі. 2 UA 102760 C2 5 10 15 20 25 30 35 40 При розташуванні важеля педалі 2 під кутом 150° від ВТ у бік робочого ходу, а важеля педалі 3 під кутом 30° від ВТ у бік робочого ходу (вихідне положення) (див. фіг. 7) зусилля, що докладаються до педалі у кінці ходу педалі (150° від ВТ) з урахуванням подовження важеля педалі на 15,5 % відтворюються важелем 2 рівним 57,735 % r (R=115,5 % r x sin30° = 115,5 % r x 0,5=57,735 % r), замість 0 % без зміщення важеля педалі від ВТ і без подовження важеля педалі. У механізмі синхронізації усі шестерні обертаються у напрямку робочого ходу, а обгінні муфти забезпечують розв'язку при обертанні валів приводів в протилежному напрямку. З кінематичної схеми видно, що усі деталі механізму синхронізації мають стандартну конструкцію і монтуються за відпрацьованою стандартною технологією, це робить конструкцію привода технологічною при виготовленні. Крім того, корпус привода 1 добре вписується в силову раму велосипеда (див. фіг. 7), а важелі педалей 2, 3 увесь час знаходяться в положенні продовження робочого ходу. З цим приводом велосипеда велосипедист зможе безперервно виконувати черговий продуктивний робочий хід з оптимальними м'язовими зусиллями і регулювати потужнісні характеристики велосипедного привода, змінюючи кут ходу важелів у діапазоні від 120° до ~ 60° між важелями. Виключений інерційний хід педалей в діапазоні ~ 60° в зоні крайньої верхньої точки положення педалі (330° до ВТ і 30° до ВТ) і в зоні крайньої нижньої точки положення педалі - ~ 60° (210° до ВТ і 150° до ВТ), що позбавляє від великої непродуктивної м'язової роботи в сумарному діапазоні 120°; Таким чином, завдання, яке до теперішнього часу до кінця не було вирішене, завдяки перерахованим новим технічним якостям привода велосипеда робить можливим використання його на практиці в масовому виготовленні. Такий привод велосипеда буде значно економити фізичні сили велосипедистів при поїздках, особливо на далекі відстані, може застосовуватись на триколісних велосипедах для літніх людей і для велорикш, а також на спортивних велосипедах, оскільки конструкція дозволяє вести педалювання двома ногами одночасно. ФОРМУЛА ВИНАХОДУ Привод велосипеда із зворотно-поступально рухомими важелями, що містить корпус, механізм синхронізації, який складається з трьох конічних шестерень, вал привода та обгінні муфти, який відрізняється тим, що перший зворотно-поступальний рухомий важіль педалей зміщений від верхньої точки положення педалей у бік робочого ходу на кут 0° < ≤ 30, другий зворотнопоступальний рухомий важіль педалей зміщений - на кут 180°-, а довжина кожного важеля збільшена в 1/cos30 разів, при цьому хід зворотно-поступально рухомих важелів педалей дорівнює куту 180°-2, обмеженому корпусом, який додатково містить другий вал привода, при цьому на кожному валу привода закріплені важіль педалі, конічна шестірня та обгінна муфта, яка заклинюється у бік робочого ходу, причому зовнішні обойми обгінних муфт є циліндричними шестернями, які через проміжні циліндричні шестерні і вали, на яких вони встановлені, пов'язані з ведучою зірочкою привідного ланцюга. 3 UA 102760 C2 4 UA 102760 C2 5 UA 102760 C2 6 UA 102760 C2 7 UA 102760 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюBicycle drive
Автори англійськоюDorozhko Oleksandr Ivanovych, Dorozhko Natalia Oleksandrivna
Назва патенту російськоюПривод велосипеда
Автори російськоюДорожко Александр Иванович, Дорожко Наталья Александровна
МПК / Мітки
МПК: B62M 1/00
Мітки: велосипеда, привод
Код посилання
<a href="https://ua.patents.su/10-102760-privod-velosipeda.html" target="_blank" rel="follow" title="База патентів України">Привод велосипеда</a>
Привід віф-віф велосипеда
Номер патенту: 51045
Опубліковано: 15.11.2002
Автор: Фещенко Володимир Ілліч
МПК: B62M 1/00
Мітки: велосипеда, привід, віф-віф
Формула / Реферат:
1. Привід велосипеда, до якого входять педалі, важелі педалей, ведуча та ведена зірочка, ланцюгова передача, який відрізняється тим, що він виконаний з коливальними важелями педалей на підшипниках, що встановлені на перехідниках, закріплених на зовнішніх кінцях втулки, всередині якої на підшипниках розташований вал, на якому закріплені ведучі диски та ведуча зірочка приводу, на важелях педалей закріплені маточини, між ними та ведучими дисками...
Імпульсно-інерційний привод велосипеда
Номер патенту: 19561
Опубліковано: 25.12.1997
Автор: Мельнік Сергій Михайлович
МПК: B62K 23/00
Мітки: привод, імпульсно-інерційний, велосипеда
Формула / Реферат:
Импульсно-инерционный привод велосипеда, содержащий цепную передачу на заднее колесо велосипеда, включающую в себя ведущую и ведомую звезды, втулочно-роликовую цепь, приводной вал и рычаги-шатуны с педалями, отличающийся тем, что рычаги-шатуны установлены на приводном валу свободно и сообщают ему прерывистое вращение через механизм одностороннего вращения, например храповый или обгонную муфту, путем угловых колебаний рычагов-шатунов...
Додатковий електропривід велосипеда
Номер патенту: 16987
Опубліковано: 15.09.2006
Автори: Музиченко Ольга Валеріївна, Педь Валерій Вікторович
Мітки: додатковий, велосипеда, електропривід
Формула / Реферат:
Додатковий електропривід велосипеда, що містить акумулятор електричної енергії, електродвигун, вихідний вал якого кінематично зв'язаний з приводом колеса за допомогою обгінної муфти, пристрій керування приводом, який відрізняється тим, що акумулятор і електродвигун закріплено над заднім колесом, а вал електродвигуна з'єднаний з редуктором, на вихідному валу якого встановлена зірочка, що зв'язана ланцюгом із зірочкою, з'єднаною з обгінною...
Привід велосипеда

Номер патенту: 96829
Опубліковано: 12.12.2011
Автор: Подлісецький Олександр Семенович
МПК: F16H 19/00, B62M 17/00, B62M 1/00, F16H 3/22
Мітки: велосипеда, привід
Формула / Реферат:
Привід велосипеда, що містить педалі, з'єднані з ведучим зубчастим колесом, ведене зубчасте колесо, що розташоване на одній осі з обгінною муфтою й заднім колесом, який відрізняється тим, що педалі закріплені до рейок, що мають косі зуби, рейки встановлені із двох боків від косозубого колеса й перебувають із ним у зачепленні з можливістю зворотно-поступального руху, причому косозубе колесо жорстко з'єднане з первинним валом, який має...
Велосипедний важільний привод – ввп
Номер патенту: 396
Опубліковано: 30.08.1999
Автор: Мельничук Святослав Сафронович
МПК: B62M 1/00
Мітки: велосипедний, привод, ввп, важільний
Формула / Реферат:
Велосипедний важільний привод, що містить вал, який обертається на підшипниках в ступиці педального вузла вело-рами, на якому жорстко закріплена ведуча зірка, яка отримує від педалей оберти, що передаються через ланцюг на ведену зірку колеса, який відрізняється тим, що прикладена фізична сила до важелів, що з'єднані за допомогою силових плоских стрічок з барабанами, змушує важелі повернутись на 60-90° і одночасно тягнути стрічку, що намотана...
Попередній патент: Вібраційна діагностична система
Наступний патент: Трек-марафон хегай (варіанти)
Випадковий патент: Пристрій захисту від дзенькоту контактів