Система попередження водія транспортного засобу про об’єкт, що перетинає або наміряється перетнути проїзну частину автомобільної дороги
Номер патенту: 103220
Опубліковано: 25.09.2013



Формула / Реферат
1. Система попередження водіїв транспортних засобів про об'єкти, що перетинають або наміряються перетнути проїзну частину дороги в контрольованій зоні, до якої наближається транспортний засіб, що містить
засіб виявлення зазначених об'єктів, який складається із взаємодіючих між собою щонайменше одного датчика виявлення із випромінювачем безперервного сигналу і приймачем зазначеного сигналу і щонайменше одного сенсора контролю стану зони детектування;
засіб керування, що взаємодіє із зазначеним засобом виявлення;
засіб оповіщення, що містить щонайменше одну систему попередження, встановлювану над проїзною частиною дороги і/або біля неї і взаємодіючу із зазначеним засобом керування,
і/або засіб попередження, встановлений в транспортному засобі та взаємодіючий із зазначеним засобом керування,
при цьому засіб керування містить контролер для керування роботою системи і приймач-передавач сигналів, що надходять від засобів виявлення і передаються засобу оповіщення в вигляді щонайменше одного попереджуючого світлового табло, встановлюваного над проїзною частиною дороги і/або біля неї за ходом руху транспортного засобу і оснащеного приймачем сигналу, настроєним на частоту зазначеного передавача сигналу для включення контролером зазначеного табло при одержанні сигналу на включення від зазначеного передавача, і/або встановленого в автомобілі засобу попередження у вигляді попереджувального табло, оснащеного приймачем сигналу, настроєним на частоту зазначеного передавача сигналу для включення контролером зазначеного табло в автомобілі при одержанні сигналу на включення від зазначеного передавача.
2. Система за п. 1, яка відрізняється тим, що датчиком виявлення може бути електромагнітний контур, датчик тиску, термодатчик, що реагує на ІЧ-випромінювання, система розпізнавання образів, що включає пристрій запису і розпізнавання образів, ультразвуковий датчик, датчик переміщення або присутності об'єкта, включаючи радарний, доплерівський, супутниковий GPS, або будь-яка комбінація зазначених пристроїв.
3. Система за п. 1, яка відрізняється тим, що сенсор контролю стану зони детектування є пристроєм, що детектує знаходження об'єкта в контрольованій зоні.
4. Система за п. 3, яка відрізняється тим, що сенсором контролю стану зони детектування може бути електромагнітний контур, датчик тиску, термодатчик, що реагує на ІЧ-випромінювання, система розпізнавання образів, що включає пристрій запису і розпізнавання образів, ультразвуковий датчик, датчик переміщення або присутності об'єкта, включаючи радарний, доплерівський, супутниковий GPS, або будь-яка комбінація зазначених пристроїв.
5. Система за п. 1, яка відрізняється тим, що зазначений засіб попередження є пристроєм подачі світлового і/або звукового сигналу.
6. Система за п. 1, яка відрізняється тим, що датчик виявлення є випромінювачем і приймачем безперервного електромагнітного сигналу в ІЧ-діапазоні, які встановлені в зоні детектування один напроти одного уздовж проїзної частини автомобільної дороги таким чином, щоб промінь випромінювача досягав приймача.
7. Система за п. 1, яка відрізняється тим, що відстань між випромінювачем і приймачем датчика виявлення визначається розмірами детектованої зони.
8. Система за п. 1, яка відрізняється тим, що випромінювач і приймач датчика виявлення встановлені таким чином, щоб формований між ними безперервний сигнал перебував на висоті 0,1-1,0 метра від поверхні землі.
9. Система за п. 1, яка відрізняється тим, що сенсор контролю стану зони детектування має діаграму спрямованості, що перекриває всю контрольовану зону.
10. Система за п. 9, яка відрізняється тим, що сенсор контролю стану зони детектування встановлений на узбіччі проїзної частини автомобільної дороги або на острівці безпеки так, щоб діаграма спрямованості покривала всю контрольовану зону.
11. Система за будь-яким з пп. 9-10, яка відрізняється тим, що сенсор контролю стану зони детектування містить випромінювач мікрохвильового діапазону і відповідний приймач.
12. Система за будь-яким з пп. 1-11, яка відрізняється тим, що контрольованою зоною є пішохідний перехід і/або небезпечна ділянка дороги, включаючи сліпі повороти, виїзди, переїзди або перехрестя.
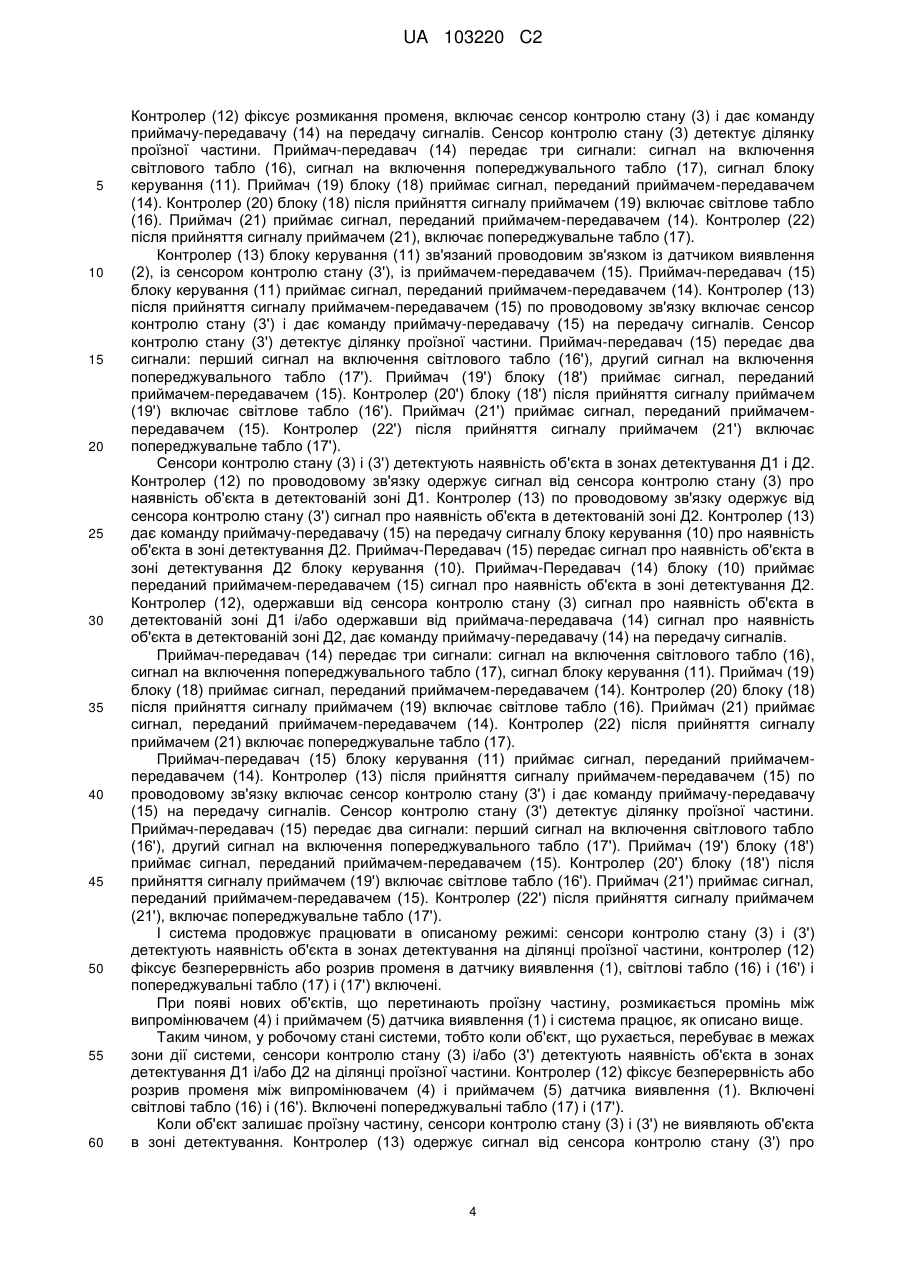
Текст
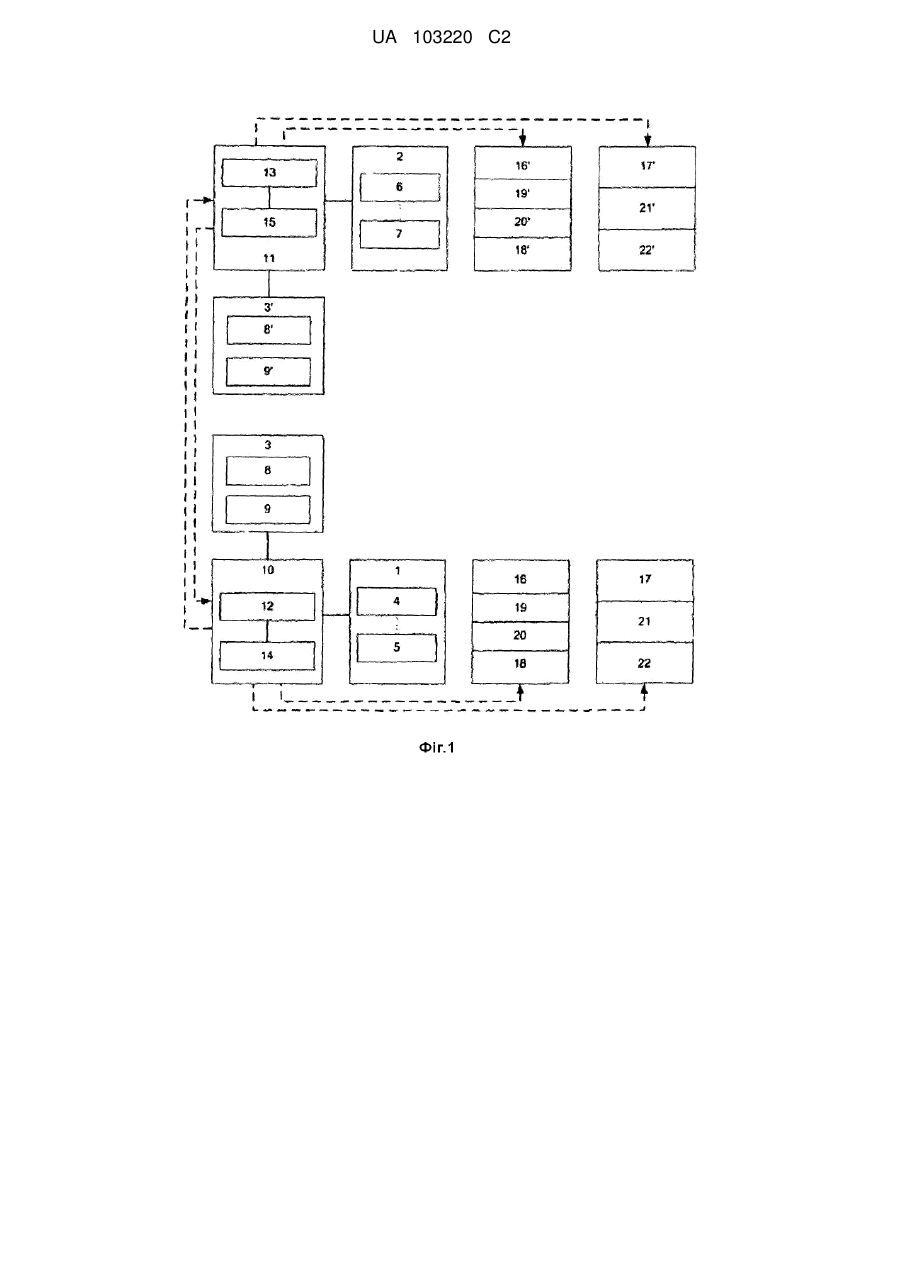
Реферат: Винахід належить до систем попередження водіїв транспортних засобів про об'єкти, що перетинають або наміряються перетнути проїзну частину автомобільної дороги, зокрема пішоходи, велосипедисти, тварини, як безпосередньо на пішохідному переході, так і на прилягаючих до нього ділянках, а також на будь-якій ділянці проїзної частини автомобільної дороги. Винахід, що заявляється, може бути використаний при облаштуванні автомобільних доріг і в автомобілебудуванні. Описується система попередження водія транспортного засобу про присутність на ділянці дороги, до якої наближається зазначений транспортний засіб, об'єкта, що перетинає або наміряється перетнути проїзну частину автомобільної дороги, яка містить засіб виявлення зазначеного об'єкта, що складається з щонайменше одного датчика виявлення, і взаємодіючого із зазначеним датчиком виявлення щонайменше одного сенсора контролю стану зони детектування зазначеної ділянки дороги, засіб керування, взаємодіючий із зазначеним засобом виявлення, і засіб оповіщення, який містить щонайменше один засіб попередження, встановлюваний над проїзною частиною дороги і/або біля неї і взаємодіючий із зазначеним засобом керування, і/або засіб попередження, встановлений в автомобілі і взаємодіючий із зазначеним засобом керування. UA 103220 C2 (12) UA 103220 C2 UA 103220 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до систем попередження водіїв транспортних засобів про об'єкти, що перетинають або наміряються перетнути проїзну частину автомобільної дороги, зокрема пішоходи, велосипедисти, тварини, як безпосередньо на пішохідному переході, так і на прилягаючих до нього ділянках, а також на будь-якій ділянці проїзної частини автомобільної дороги. Винахід, що заявляється, може бути використаний при облаштованості автомобільних доріг і в автомобілебудуванні. Щорічний збиток від автомобільних аварій в усьому світу оцінюється в 518 мільярдів доларів США, 1,2 млн. чоловік стають жертвами дорожньо-транспортних випадків (ДТП), близько 50 млн. чоловік одержують травми в дорожніх подіях. За статистичним даними (Elizabeth and Cropper, Maureen L., "Traffic Fatalities and Economic Growth" (April 17, 2003). World Bank Policy Research Working Paper No. 3035) зіткнення автомобіля з пішоходом - одна з основних причин смерті пішохода при ДТП. При цьому до 70 % ДТП за участю пішоходів відбувається при переході проїзної частини дороги, а найбільшої небезпеки пішоходи зазнають у темний і сутінковий час доби, на який доводиться більш 55 % усіх смертей пішоходів у ДТП. Заходи, що вживають для підвищення безпеки учасників дорожнього руху, зосереджені переважно на підвищенні якості підготовки водіїв транспортних засобів, контролі й жорсткості покарань за керування автомобілем під впливом наркотичних і/або алкогольних речовин, за перевищення швидкості й невикористання ременів безпеки. Значно менше уваги приділяється заходам щодо підвищення безпеки пішохідних переходів і інших небезпечних ділянок доріг. З рівня техніки відомі різні підходи щодо розв'язання зазначеної проблеми: облаштованість автомобільних доріг підземними або наземними переходами, оснащення наземних пішохідних переходів світлофорами, освітлювальними устроями і т.д. Описана (патент США 5406276, 11.04.1995) система світлової індикації пішохідного переходу шляхом розміщення лазерних джерел випромінювання, розташованих так, щоб виявляти пішохода, що входить у перехід, і активізувати світловий сигнал, який попереджає водія про те, що пішохід почав рух на переході. Система вимикається через програмувальний інтервал часу, незалежно від того, чи закінчив пішохід переходити проїзну частину або з якихось причин є присутнім на проїзній частині. Тим самим система не повністю забезпечує безпеку учасників дорожнього руху, що перебувають у зоні пішохідного переходу. У патенті США 6337637, 08.01.2002 описана система запобігання зіткнення автомобіля з пішоходом, що включає засіб виявлення пішохода, засіб ідентифікації умов дорожньої поверхні, засіб виявлення положення автомобіля, пристрій обробки інформації, отриманої від зазначених засобів, засіб інформування водія про можливе зіткнення, засобу керування для вповільнення або зупинки автомобіля. Недоліком даної системи є дуже складна система датчиків, сенсорів, розрахунків, спрямована на контроль (аж до примусового зупинення транспортного засобу) і змінення поведінки водія в критичній ситуації, з урахуванням швидкостей пересування пішохода й транспортного засобу, стану дорожнього покриття, освітлення. Реалізація даної системи вимагає складних і дорогих змін конструкції всіх транспортних засобів. Також потрібне внесення змін у систему навчання водіїв і значна модернізація дорожньої інфраструктури. У патенті Японії 2000-160987 описана система освітлення пішохідного переходу при наявності людини на переході в темний час доби, що складається із сенсора наявності людини, який визначає наявність об'єкта, що наміряється перейти дорогу по переходу, шляхом визначення теплового випромінювання, випромінюваного тілом людини, яка перебуває в певній області перед переходом; сенсора, що визначає освітленість навколишнього середовища; системи освітлення зони переходу й керуючої частини, за допомогою якої загоряється світло, якщо сенсор освітленості визначає, що освітленість недостатня. Однак дана система має наступні недоліки, що не дозволяють забезпечити безпеку учасників дорожнього руху: сенсор теплового випромінювання не завжди забезпечує достовірне детектування знаходження пішохода на переході, різке включення освітлення переходу може призвести до тимчасового осліплення водія транспортного засобу й створення аварійної обстановки на дорозі. Задачею даного винаходу є створення ефективної системи попередження водія транспортного засобу про об'єкти, зокрема пішоходів, що перетинають або наміряються перетнути проїзну частину автомобільної дороги, яка забезпечить зменшення кількості дорожньо-транспортних випадків за участю пішоходів і скорочення їхньої смертності. Поставлена задача вирішується системою попередження водія транспортного засобу про присутність на ділянці дороги, до якої наближається зазначений транспортний засіб, об'єкта, що перетинає або наміряється перетнути проїзну частину автомобільної дороги, що включає засіб виявлення зазначеного об'єкта, що складається із щонайменше одного датчика виявлення й взаємодіючого із зазначеним датчиком виявлення щонайменше одного сенсора контролю стану 1 UA 103220 C2 5 10 15 20 25 30 35 40 45 50 55 60 зони детектування зазначеної ділянки дороги, засобу керування, взаємодіючого із зазначеним засобом виявлення й засобом оповіщення; і засобу оповіщення, який включає щонайменше один засіб попередження, встановлюваний над проїзною частиною дороги й/або біля неї й взаємодіючий із зазначеним засобом керування, і/або засіб попередження, встановлений в автомобілі й взаємодіючий із зазначеним засобом керування. Датчиком виявлення може бути електромагнітний контур, датчик тиску, термодатчик, що реагує на Іч-випромінювання, система розпізнавання образів, яка включає пристрій спостереження й пристрій розпізнавання образів, ультразвуковий датчик, датчик переміщення або присутності об'єкта, включаючи радарний, доплеровський, супутниковий GPS, або будь-яка комбінація зазначених пристроїв. Сенсор контролю стану зони детектування являє собою пристрій, що детектує знаходження об'єкта в зазначеній зоні. Пристроєм, що детектує знаходження об'єкта в зазначеній зоні, може бути електромагнітний контур, датчик тиску, термодатчик, що реагує на Іч-випромінювання, система розпізнавання образів, що включає пристрій спостереження й пристрій розпізнавання образів, ультразвуковий датчик, датчик переміщення об'єкта, у т.ч. радарний, доплеровський, супутниковий GPS, або будь-яка комбінація зазначених пристроїв. Засіб попередження, встановлюваний над проїзною частиною дороги й/або біля неї, являє собою пристрій подачі світлового й/або звукового сигналу. Засіб попередження, встановлюваний в автомобілі, являє собою пристрій подачі світлового й/або звукового сигналу. У переважному варіанті реалізації заявленого винаходу система включає засіб виявлення, який складається із щонайменше двох датчиків виявлення, кожний з яких містить випромінювач безперервного сигналу й приймач зазначеного сигналу, і взаємодіючого із зазначеними датчиками виявлення щонайменше одного сенсора контролю стану зони детектування зазначеної ділянки дороги; засіб керування, що включає контролер для керування роботою системи й приймач-передавач сигналів, що надходять від засобів виявлення й передаються засобам оповіщення, і засоби оповіщення у вигляді щонайменше одного світлового табло, встановлюваного над проїзною частиною дороги й/або біля неї за ходом руху транспортного засобу й постаченого приймачем сигналу, настроєним на частоту зазначеного передавача сигналу, і контролером для включення зазначеного табло при одержанні сигналу на включення від зазначеного передавача, і/або встановленого в автомобілі попереджувального табло із приймачем сигналу, настроєним на частоту зазначеного передавача сигналу, і контролером для включення зазначеного табло в автомобілі при одержанні сигналу на включення від зазначеного передавача. У ще одному переважному варіанті датчик виявлення являє собою випромінювач і приймач безперервного електромагнітного сигналу в Іч-діапазоні, встановлені в зоні детектування один напроти одного уздовж проїзної частини автомобільної дороги таким чином, щоб промінь випромінювача попадав у вікно приймача. Відстань між випромінювачем і приймачем датчика виявлення визначається розмірами небезпечної ділянки детектованої зони, зокрема, шириною пішохідного переходу. Датчик виявлення встановлюється таким чином, щоб формований між випромінювачем і приймачем датчика безперервний сигнал перебував на висоті 0,1-1,0 метра від поверхні землі, що дозволяє фіксувати факт початку перетинання проїзної частини автомобільної дороги людиною або твариною. Сенсор контролю стану зони детектування зазначеної ділянки дороги має діаграму спрямованості, що перекриває всю контрольовану зону. Сенсор контролю стану зони детектування встановлюють на узбіччі проїзної частини автомобільної дороги або на острівці безпеки так, щоб діаграма спрямованості покривала необхідну для детектування ділянку, наприклад, пішохідний перехід. У випадку, коли ширина проїзної частини перевищує можливості сенсора, то встановлюють додаткові сенсори, що забезпечує повне покриття контрольованої зони перехрестя. У переважному варіанті сенсор контролю стану зони детектування включає випромінювач мікрохвильового діапазону й відповідний приймач. Система, що заявляється, може встановлюватися на будь-якій ділянці проїзної частини автомобільної дороги, але, як правило, детектованою ділянкою дороги є пішохідний перехід і/або небезпечна ділянка дороги, включаючи сліпі повороти, виїзди, переїзди. На Фіг. 1 зображена блок-схема заявленої системи попередження. На Фіг. 2 схематично зображена ділянка автомобільної дороги, оснащена заявленою системою попередження. Далі описується переважний варіант реалізації за даним винаходом, що не обмежує його об'єм. 2 UA 103220 C2 5 10 15 20 25 30 35 40 45 50 55 60 Система попередження, що заявляється, включає три основні блоки: засіб виявлення об'єкта, що перетинає проїзну частину автомобільної дороги або, що наміряється її перетнути, засіб керування системою й засіб оповіщення водія про об'єкт, що перетинає проїзну частину або, що наміряється її перетнути. Як показано на Фіг. 1, засіб виявлення містить два датчики виявлення (1) і (2) і два сенсори контролю стану зони детектування (3) і (3'). Кожний датчик виявлення містить у собі випромінювач і приймач, що працюють в Іч-діапазоні, відповідно випромінювач (4) для датчика (1), випромінювач (6) для датчика (2), приймач електромагнітного сигналу (5) для датчика (1) і приймач електромагнітного сигналу (7) для датчика (2). Випромінювач (4) і приймач (5) датчика (1) і, відповідно, випромінювач (6) і приймач (7) датчика (2), формують між собою безперервний сигнал (на Фіг. 1 показаний пунктирною лінією) на висоті 0,5 метра від поверхні землі. Засіб керування системою містить два блоки керування (10) і (11). Блок керування (10) з'єднаний з датчиком виявлення (1) і сенсором контролю стану зони детектування (3) проводовим зв'язком (на Фіг. 1 - суцільна лінія). Аналогічно блок керування (11) з'єднаний з датчиком виявлення (2) і сенсором контролю стану зони детектування (3'). Кожний зазначений блок керування містить у собі контролер (12) для блоку (10), відповідно контролер (13) для блоку (11), для керування роботою системи й приймач-передавач (14) для блоку (10), відповідно приймач-передавач (15) для блоку (11), який служить для обміну (приймання й передачі) сигналами між контролерами (12) і (13), для передачі сигналу на включення світлових табло (16) і (16') і для передачі сигналу на включення попереджувального табло в автомобілі (17) і (17'). Приймач-передавач відповідного блоку керування передає й приймає сигнали, які є кодованою частотою в Fm-діапазоні (на Фіг. 1 показані пунктирною лінією). Засіб оповіщення водія являє собою світлове табло (16) і (16') з попереджуючими написами. Світлове табло встановлюють або над проїзною частиною дороги за ходом руху транспортного засобу, або біля проїзної частини дороги за ходом руху транспортного засобу на відстані, що дозволяє водієві знизити швидкість і вжити необхідних заходів для забезпечення безпеки пішоходів. Оптимально визначена відстань становить 30-100 метрів залежно від рельєфу місцевості. За необхідністю в одному напрямку на деякій відстані один від одного можуть бути встановлені два й більше світлових табло. Світловим табло (16) управляє блоком керування (18), який змонтований у корпусі світлового табло й містить приймач електромагнітного сигналу (19), наприклад, Fm-сигналу, і контролер (20) для включення світлового табло при одержанні сигналу на включення від передавача (14). Світловим табло (16') управляє блоком керування (18'), який змонтований у корпусі світлового табло й містить приймач електромагнітного сигналу (19'), наприклад, Fm-сигналу, і контролер (20') для включення світлового табло при одержанні сигналу на включення від передавача (15). Приймач Fm-сигналу (19) настроєний на частоту передавача (14), приймач (19') - на частоту передавача (15). Залежно від ширини проїзної частини частоти сигналів передавачів (14) і (15) можуть бути однакові або різні. У переважному варіанті засіб оповіщення містить засіб оповіщення водія (17) і (17'), встановлений в автомобілі, наприклад, попереджувальне табло у вигляді сигнальної лампи. Попереджувальне табло може бути змонтоване в одному корпусі із приймачем Fm-сигналу (21), (21'), настроєним на частоту передавачів (14) або (15), відповідно, і контролером (22), (22'). Як показано на Фіг. 2, датчики виявлення встановлені на узбіччях автомобільної дороги. Випромінювач і приймач кожного датчика виявлення встановлені в зоні детектування один напроти одного уздовж проїзної частини автомобільної дороги таким чином, щоб промінь випромінювача попадав у вікно приймача. Відстань між випромінювачем і приймачем кожного датчика виявлення визначається розмірами небезпечної ділянки зони детектування й може варіюватися від 0,5 до 50 метрів. При цьому промінь випромінювача (4) спрямований у вікно приймача (5) датчика (1), відповідно промінь випромінювача (6) спрямований у вікно приймача (7) датчика (2). Сенсори контролю стану зони детектування (3) і (3') встановлюють на різних сторонах проїзної частини таким чином, щоб діаграма спрямованості покривала детектовану ділянку дороги. Заявлена система попередження працює наступним чином. У режимі очікування контролер (12) блоку керування (10) зв'язаний проводовим зв'язком з датчиком виявлення (1), із сенсором контролю стану (3) та із приймачем-передавачем (14). На стороні А (Фіг. 2) рухомий об'єкт наближається до пішохідного переходу з метою перетнути проїзну частину дороги в напрямку сторони В і має намір ступити на проїзну частину ділянки дороги, обладнаної системою, що заявляється. Об'єкт перетинає промінь електромагнітного сигналу між випромінювачем (4) датчика (1) і приймачем (5) датчика (1). Промінь розмикається. 3 UA 103220 C2 5 10 15 20 25 30 35 40 45 50 55 60 Контролер (12) фіксує розмикання променя, включає сенсор контролю стану (3) і дає команду приймачу-передавачу (14) на передачу сигналів. Сенсор контролю стану (3) детектує ділянку проїзної частини. Приймач-передавач (14) передає три сигнали: сигнал на включення світлового табло (16), сигнал на включення попереджувального табло (17), сигнал блоку керування (11). Приймач (19) блоку (18) приймає сигнал, переданий приймачем-передавачем (14). Контролер (20) блоку (18) після прийняття сигналу приймачем (19) включає світлове табло (16). Приймач (21) приймає сигнал, переданий приймачем-передавачем (14). Контролер (22) після прийняття сигналу приймачем (21), включає попереджувальне табло (17). Контролер (13) блоку керування (11) зв'язаний проводовим зв'язком із датчиком виявлення (2), із сенсором контролю стану (3'), із приймачем-передавачем (15). Приймач-передавач (15) блоку керування (11) приймає сигнал, переданий приймачем-передавачем (14). Контролер (13) після прийняття сигналу приймачем-передавачем (15) по проводовому зв'язку включає сенсор контролю стану (3') і дає команду приймачу-передавачу (15) на передачу сигналів. Сенсор контролю стану (3') детектує ділянку проїзної частини. Приймач-передавач (15) передає два сигнали: перший сигнал на включення світлового табло (16'), другий сигнал на включення попереджувального табло (17'). Приймач (19') блоку (18') приймає сигнал, переданий приймачем-передавачем (15). Контролер (20') блоку (18') після прийняття сигналу приймачем (19') включає світлове табло (16'). Приймач (21') приймає сигнал, переданий приймачемпередавачем (15). Контролер (22') після прийняття сигналу приймачем (21') включає попереджувальне табло (17'). Сенсори контролю стану (3) і (3') детектують наявність об'єкта в зонах детектування Д1 і Д2. Контролер (12) по проводовому зв'язку одержує сигнал від сенсора контролю стану (3) про наявність об'єкта в детектованій зоні Д1. Контролер (13) по проводовому зв'язку одержує від сенсора контролю стану (3') сигнал про наявність об'єкта в детектованій зоні Д2. Контролер (13) дає команду приймачу-передавачу (15) на передачу сигналу блоку керування (10) про наявність об'єкта в зоні детектування Д2. Приймач-Передавач (15) передає сигнал про наявність об'єкта в зоні детектування Д2 блоку керування (10). Приймач-Передавач (14) блоку (10) приймає переданий приймачем-передавачем (15) сигнал про наявність об'єкта в зоні детектування Д2. Контролер (12), одержавши від сенсора контролю стану (3) сигнал про наявність об'єкта в детектованій зоні Д1 і/або одержавши від приймача-передавача (14) сигнал про наявність об'єкта в детектованій зоні Д2, дає команду приймачу-передавачу (14) на передачу сигналів. Приймач-передавач (14) передає три сигнали: сигнал на включення світлового табло (16), сигнал на включення попереджувального табло (17), сигнал блоку керування (11). Приймач (19) блоку (18) приймає сигнал, переданий приймачем-передавачем (14). Контролер (20) блоку (18) після прийняття сигналу приймачем (19) включає світлове табло (16). Приймач (21) приймає сигнал, переданий приймачем-передавачем (14). Контролер (22) після прийняття сигналу приймачем (21) включає попереджувальне табло (17). Приймач-передавач (15) блоку керування (11) приймає сигнал, переданий приймачемпередавачем (14). Контролер (13) після прийняття сигналу приймачем-передавачем (15) по проводовому зв'язку включає сенсор контролю стану (3') і дає команду приймачу-передавачу (15) на передачу сигналів. Сенсор контролю стану (3') детектує ділянку проїзної частини. Приймач-передавач (15) передає два сигнали: перший сигнал на включення світлового табло (16'), другий сигнал на включення попереджувального табло (17'). Приймач (19') блоку (18') приймає сигнал, переданий приймачем-передавачем (15). Контролер (20') блоку (18') після прийняття сигналу приймачем (19') включає світлове табло (16'). Приймач (21') приймає сигнал, переданий приймачем-передавачем (15). Контролер (22') після прийняття сигналу приймачем (21'), включає попереджувальне табло (17'). І система продовжує працювати в описаному режимі: сенсори контролю стану (3) і (3') детектують наявність об'єкта в зонах детектування на ділянці проїзної частини, контролер (12) фіксує безперервність або розрив променя в датчику виявлення (1), світлові табло (16) і (16') і попереджувальні табло (17) і (17') включені. При появі нових об'єктів, що перетинають проїзну частину, розмикається промінь між випромінювачем (4) і приймачем (5) датчика виявлення (1) і система працює, як описано вище. Таким чином, у робочому стані системи, тобто коли об'єкт, що рухається, перебуває в межах зони дії системи, сенсори контролю стану (3) і/або (3') детектують наявність об'єкта в зонах детектування Д1 і/або Д2 на ділянці проїзної частини. Контролер (12) фіксує безперервність або розрив променя між випромінювачем (4) і приймачем (5) датчика виявлення (1). Включені світлові табло (16) і (16'). Включені попереджувальні табло (17) і (17'). Коли об'єкт залишає проїзну частину, сенсори контролю стану (3) і (3') не виявляють об'єкта в зоні детектування. Контролер (13) одержує сигнал від сенсора контролю стану (3') про 4 UA 103220 C2 5 10 15 20 25 30 35 відсутність об'єктів у зоні детектування Д2. Контролер (13) дає команду приймачу-передавачу (15) на передачу сигналу. Приймач-Передавач (15) передає сигнал блоку керування (10) про відсутність об'єкта в зоні детектування Д2. Приймач-Передавач (14) приймає сигнал від приймача-передавача (15) про відсутність об'єкта в зоні детектування Д2. Контролер (12) одержує сигнал від приймача-передавача (14) про відсутність об'єкта в зоні детектування Д2. Контролер (12) одержує від сенсора контролю стану (3) сигнал про відсутність об'єктів у зоні детектування Д1. Контролер (12) одержує від датчика виявлення (1) сигнал про безперервність променя між випромінювачем (4) і приймачем (5) датчика виявлення (1). Контролер (12) протягом програмованого проміжку часу, що дозволяє об'єкту покинути зону переходу, наприклад 15-30 сек., одержує від приймача-передавача (14) сигнал про відсутність об'єкта в зоні детектування Д2, від сенсора контролю стану (3) - сигнал про відсутність об'єктів у зоні детектування Д1 і від датчика виявлення (1) - сигнал про безперервність променя між випромінювачем (4) і приймачем (5) датчика виявлення (1). Контролер (12) після закінчення програмованого проміжку часу й тільки при наявності постійних сигналів про безперервність променя між випромінювачем (4) і приймачем (5) датчика (1) і про відсутність об'єкта в зонах детектування не видає команди на включення сенсорів контролю стану й включення світлового й попереджувальних табло. Сенсори контролю стану (3) і (3') вимикаються, світлові табло (16), (16') вимикаються, попереджувальні табло (17), (17') вимикаються. Система переходить у режим очікування. Вищеописаним чином, тільки із дзеркальним відбиттям, система працює при русі об'єкта з боку В у напрямку боку А. У цьому випадку об'єкт перетинає промінь електромагнітного сигналу між випромінювачем (6) і приймачем (7) датчика (2). Контролер (13) фіксує розрив променя і т.д. Система, що заявляється, має ряд переваг перед відомими системами. При використанні системи забезпечується завчасна передача водіям транспортних засобів інформації про наявність на контрольованій ділянці пішохода (або іншого об'єкта). Включення й вимикання системи відбувається винятково відповідно до ситуації на контрольованій ділянці. На відміну від установлених попереджуючих знаків або миготливих жовтих світлофорів, система не викликає у водія транспортного засобу звикання, тому що є активною й попереджає про пішохода тільки тоді, коли він дійсно переходить проїзну частину або має намір її перейти. Система забезпечує завчасне попередження про небезпеку спереду й можливість прогнозування поведінки водія транспортного засобу. При цьому система, що заявляється, не виявляє негативного впливу на навколишнє середовище, на відміну від ситуації зі світлофорами або "лежачими поліцейськими", коли транспорт примусово зупиняється, а потім прискорюється й розганяється, що призводить до додаткових викидів вихлопних газів. Монтаж системи не вимагає розриття дорожнього полотна й, відповідно, припинення руху на даній ділянці дороги на час монтажу. ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Система попередження водіїв транспортних засобів про об'єкти, що перетинають або наміряються перетнути проїзну частину дороги в контрольованій зоні, до якої наближається транспортний засіб, що містить засіб виявлення зазначених об'єктів, який складається із взаємодіючих між собою щонайменше одного датчика виявлення із випромінювачем безперервного сигналу і приймачем зазначеного сигналу і щонайменше одного сенсора контролю стану зони детектування; засіб керування, що взаємодіє із зазначеним засобом виявлення; засіб оповіщення, що містить щонайменше одну систему попередження, встановлювану над проїзною частиною дороги і/або біля неї і взаємодіючу із зазначеним засобом керування, і/або засіб попередження, встановлений в транспортному засобі та взаємодіючий із зазначеним засобом керування, при цьому засіб керування містить контролер для керування роботою системи і приймачпередавач сигналів, що надходять від засобів виявлення і передаються засобу оповіщення в вигляді щонайменше одного попереджуючого світлового табло, встановлюваного над проїзною частиною дороги і/або біля неї за ходом руху транспортного засобу і оснащеного приймачем сигналу, настроєним на частоту зазначеного передавача сигналу для включення контролером зазначеного табло при одержанні сигналу на включення від зазначеного передавача, і/або встановленого в автомобілі засобу попередження у вигляді попереджувального табло, оснащеного приймачем сигналу, настроєним на частоту зазначеного передавача сигналу для включення контролером зазначеного табло в автомобілі при одержанні сигналу на включення від зазначеного передавача. 5 UA 103220 C2 5 10 15 20 25 30 2. Система за п. 1, яка відрізняється тим, що датчиком виявлення може бути електромагнітний контур, датчик тиску, термодатчик, що реагує на ІЧ-випромінювання, система розпізнавання образів, що включає пристрій запису і розпізнавання образів, ультразвуковий датчик, датчик переміщення або присутності об'єкта, включаючи радарний, доплерівський, супутниковий GPS, або будь-яка комбінація зазначених пристроїв. 3. Система за п. 1, яка відрізняється тим, що сенсор контролю стану зони детектування є пристроєм, що детектує знаходження об'єкта в контрольованій зоні. 4. Система за п. 3, яка відрізняється тим, що сенсором контролю стану зони детектування може бути електромагнітний контур, датчик тиску, термодатчик, що реагує на ІЧвипромінювання, система розпізнавання образів, що включає пристрій запису і розпізнавання образів, ультразвуковий датчик, датчик переміщення або присутності об'єкта, включаючи радарний, доплерівський, супутниковий GPS, або будь-яка комбінація зазначених пристроїв. 5. Система за п. 1, яка відрізняється тим, що зазначений засіб попередження є пристроєм подачі світлового і/або звукового сигналу. 6. Система за п. 1, яка відрізняється тим, що датчик виявлення є випромінювачем і приймачем безперервного електромагнітного сигналу в ІЧ-діапазоні, які встановлені в зоні детектування один напроти одного уздовж проїзної частини автомобільної дороги таким чином, щоб промінь випромінювача досягав приймача. 7. Система за п. 1, яка відрізняється тим, що відстань між випромінювачем і приймачем датчика виявлення визначається розмірами детектованої зони. 8. Система за п. 1, яка відрізняється тим, що випромінювач і приймач датчика виявлення встановлені таким чином, щоб формований між ними безперервний сигнал перебував на висоті 0,1-1,0 метра від поверхні землі. 9. Система за п. 1, яка відрізняється тим, що сенсор контролю стану зони детектування має діаграму спрямованості, що перекриває всю контрольовану зону. 10. Система за п. 9, яка відрізняється тим, що сенсор контролю стану зони детектування встановлений на узбіччі проїзної частини автомобільної дороги або на острівці безпеки так, щоб діаграма спрямованості покривала всю контрольовану зону. 11. Система за будь-яким з пп. 9-10, яка відрізняється тим, що сенсор контролю стану зони детектування містить випромінювач мікрохвильового діапазону і відповідний приймач. 12. Система за будь-яким з пп. 1-11, яка відрізняється тим, що контрольованою зоною є пішохідний перехід і/або небезпечна ділянка дороги, включаючи сліпі повороти, виїзди, переїзди або перехрестя. 6 UA 103220 C2 7 UA 103220 C2 Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for alerting a driver of an object crossing the roadway or intending to cross thereof
Автори російськоюDrynkin, Andrey Anatolievich, Mukhaev, Sergey Borisovich
МПК / Мітки
МПК: G08G 1/005, G08G 1/16
Мітки: перетнути, наміряється, об`єкт, перетинає, автомобільної, транспортного, попередження, засобу, дороги, проїзну, частину, система, водія
Код посилання
<a href="https://ua.patents.su/10-103220-sistema-poperedzhennya-vodiya-transportnogo-zasobu-pro-obehkt-shho-peretinaeh-abo-namiryaehtsya-peretnuti-proznu-chastinu-avtomobilno-dorogi.html" target="_blank" rel="follow" title="База патентів України">Система попередження водія транспортного засобу про об’єкт, що перетинає або наміряється перетнути проїзну частину автомобільної дороги</a>
Пристрій для попередження водія автотранспортного засобу про наявність залізничного переїзду
Номер патенту: 79530
Опубліковано: 25.06.2007
Автори: Душник Володимир Феліксович, Тараненко Євген Володимирович, Бурачек Всеволод Германович, Васильєв Олександр Павлович, Хрущ Анатолій Васильович
МПК: G08G 1/16, B61L 25/00
Мітки: водія, попередження, переїзду, залізничного, автотранспортного, наявність, пристрій, засобу
Формула / Реферат:
Пристрій для попередження водія автотранспортного засобу про наявність залізничного переїзду, що містить джерело радіовипромінювання, приймач радіовипромінювання, сигналізатори та регулятор відстані, який відрізняється тим, що джерело радіовипромінювання містить захисний корпус з міцного матеріалу, встановлений в зоні переїзду, діаграма спрямованості його радіопроменів зорієнтована з урахуванням захоплювання проїзної частини дороги по обидва...
Система захисту очей водія і пасажирів транспортного засобу від надмірного освітлення
Номер патенту: 81848
Опубліковано: 10.07.2013
Автор: Шмігель Оксана Франківна
Мітки: освітлення, очей, транспортного, засобу, надмірного, захисту, пасажирів, водія, система
Формула / Реферат:
1. Система захисту очей водія і пасажирів транспортного засобу від надмірного освітлення, що містить екран, привідні механізми, блок управління, перемикач, яка відрізняється тим, що система містить декілька захисних від засліплення екранів, виконаних із світлофільтруючого скла або плівки площинного типу, щонайменше чотири привідні механізми відповідних екранів, відповідно, переднього, заднього та бокового скла для водія та для пасажира, блок...
Система захисту очей водія від засліплення світлом фар зустрічного транспортного засобу
Номер патенту: 31347
Опубліковано: 15.02.2002
Автор: Залізчук Олександр Юрійович
МПК: G02B 1/08
Мітки: фар, транспортного, захисту, водія, світлом, засліплення, очей, засобу, система, зустрічного
Формула / Реферат:
Система захисту очей водія від засліплення світлом фар зустрічного транспортного засобу, яка містить розташовані на кожному транспортному засобі захисний екран водія, екрани передніх фар яка відрізняється тим, що вона обладнана комплектом поляризаторів світла фар та захисного екрана водія, розташованого на кожному транспортному засобі, поляризатори світла фар виконані у вигляді фільтрів, захисний екран водія виконаний у вигляді лобового скла...
Комбінована система вентиляції тунелю міської двоярусної автомобільної дороги
Номер патенту: 24941
Опубліковано: 25.07.2007
Автори: Гузик Дмитро Володимирович, Гузик Марина Петрівна, Бідношея Марина Валентинівна, Бідношея Валентин Якович
МПК: E01C 3/00, E01C 1/00, E21F 1/00
Мітки: комбінована, система, міської, дороги, вентиляції, автомобільної, тунелю, двоярусної
Формула / Реферат:
1. Комбінована система вентиляції тунелю міської двоярусної автомобільної дороги, що містить окремі системи загальнообмінної та протидимної вентиляції, відведення забрудненого повітря із тунелів в режимах повітрообміну та димовидалення в приземний прошарок повітря міської забудови, яка відрізняється тим, що обладнана елементами для викиду забрудненого повітря вище приземного його прошарку, а елементи припливних вентиляційних систем виконані з...
Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги
Номер патенту: 8852
Опубліковано: 15.08.2005
Автори: Малік Тетяна Миколаївна, Бурачек Всеволод Германович, Каракай Сергій Васильович, Шульц Роман Володимирович, Присяжнюк Анатолій Йосифовіч, Васильєв Олександр Павлович
МПК: G03B 41/00
Мітки: знімання, параметрів, автомобільної, цифрового, дороги, пристрій, автоматизованого
Формула / Реферат:
Пристрій для автоматизованого цифрового знімання параметрів автомобільної дороги, що містить блок цифрових камер, блок обробки інформації, інерціально-навігаційний блок, GPS-приймач, ложемент та блок живлення, що розміщені на рухомому об'єкті, який відрізняється тим, що в ньому блок цифрових камер має дві групи камер - групу камер точного фотограмметричного каналу, групу камер оглядового фотограмметричного каналу, при цьому оптичні осі камер...
Попередній патент: Система автоматизованої роботи торгового агента
Наступний патент: Стабільний склад рекомбінантного альбуміну людини-гранулоцитарного колонієстимулюючого фактора людини
Випадковий патент: Автоматичний вимикач змінного струму