Вантажозахватний пристрій
Номер патенту: 104496
Опубліковано: 10.02.2014
Автори: Гріцан Анатолій Феодосійович, Шабалдак Микола Васильович, Себякіна Марина Миколаївна
Формула / Реферат
1. Вантажозахватний пристрій, який містить механізм захоплення вантажів, укладених в стопу, що містить орган захоплення з приводом і фіксатором положення підготовки до захоплення, і механізм підйому, який відрізняється тим, що орган захоплення виконаний у вигляді шарнірно змонтованих на підвісній траверсі механізму підйому L-подібних захватних лап, обладнаних внизу поворотними у вертикальній площині відкидними щоками, привід органа захоплення виконаний у вигляді шарнірно сполучених зовні із захватними лапами стяжок, внутрішні кінці яких шарнірно зв'язані з вертикально рухомим штоком, що проходить крізь нерухому гільзу згаданої траверси, а фіксатор положення підготовки до захоплення виконаний у вигляді нижнього рухомого і верхнього нерухомого конусів, що охоплюють гільзу, встановлених з можливістю взаємного контакту своїми конічними поверхнями і фіксації гакоподібними захватами, змонтованими на стакані, який рухомо охоплює шток, шарнірно сполученому з сергою механізму підйому, що навішується на гак вантажопідйомного крана.
2. Пристрій за п. 1, який відрізняється тим, що до нижнього кінця штока шарнірно прикріплений центруючий стрижень.
3. Пристрій за п. 1, який відрізняється тим, що у фіксаторі положення підготовки до захоплення рухомий, щодо гільзи траверси, конус встановлений з можливістю вертикального переміщення по гільзі, а нерухомий конус жорстко закріплений на верхній частині гільзи траверси, причому рухомий конус має верхню і нижню зовнішні конічні поверхні, а нерухомий конус має верхню зовнішню конічну поверхню і нижню внутрішню конічну поверхню, призначену для контакту з верхньою зовнішньою поверхнею рухомого конуса.
Текст
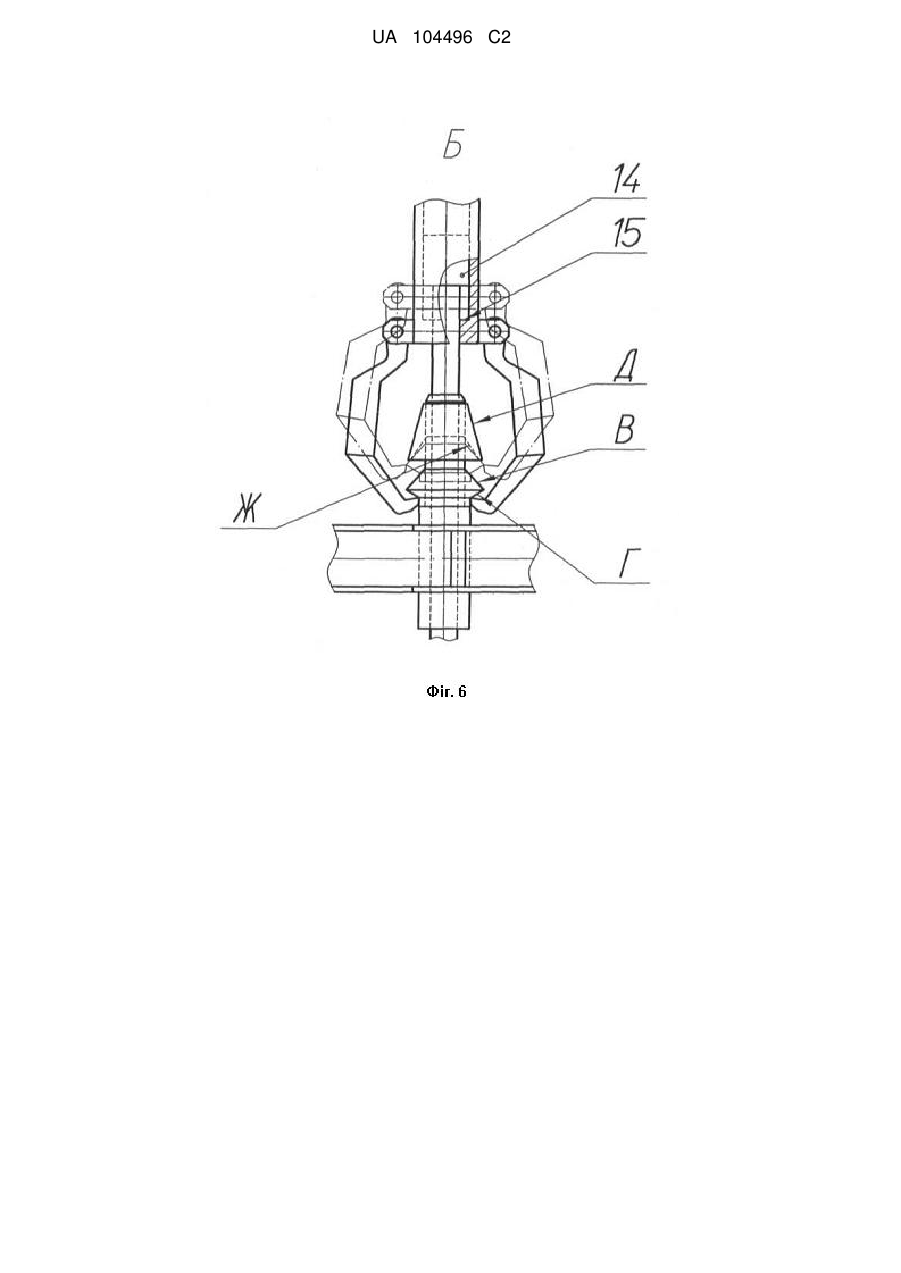
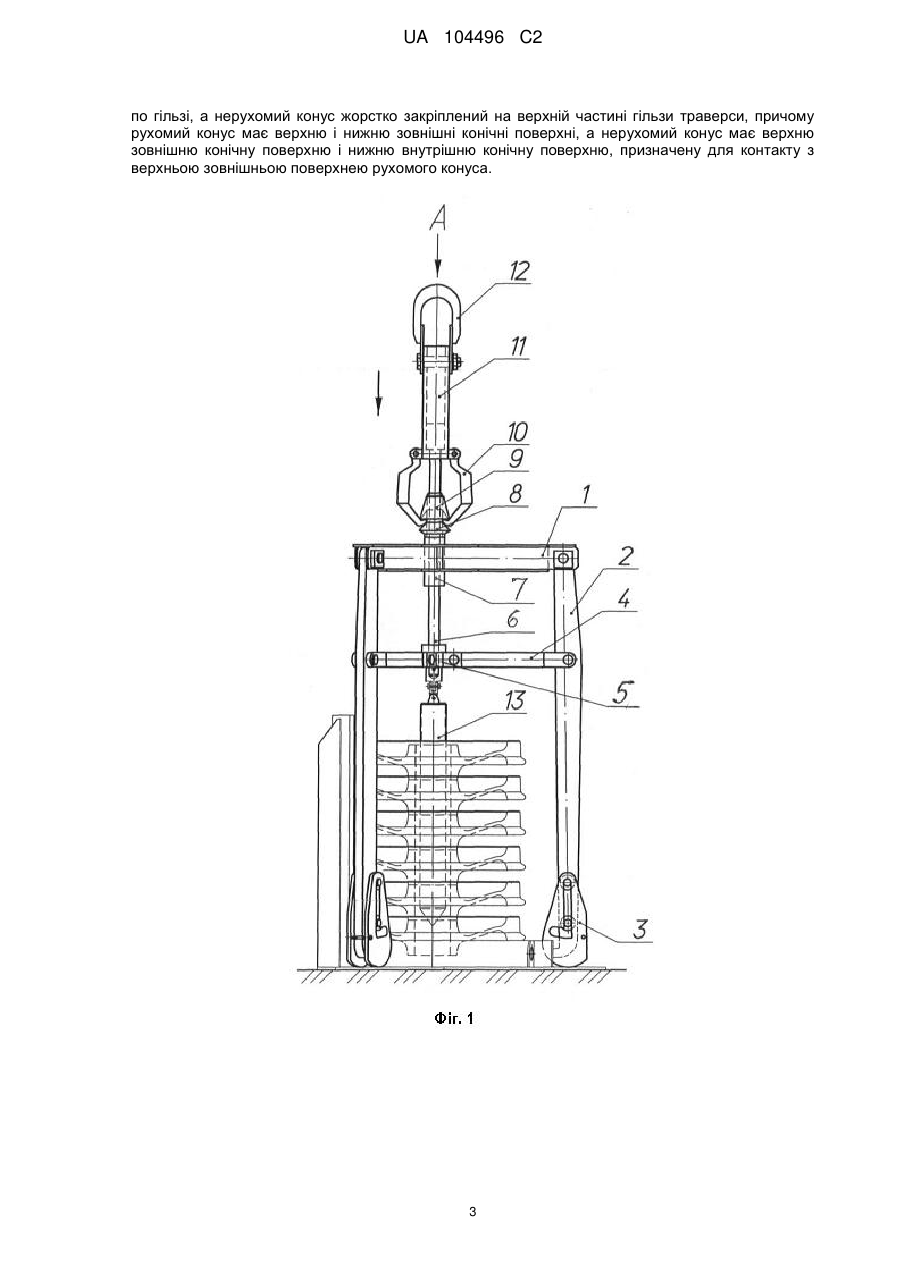
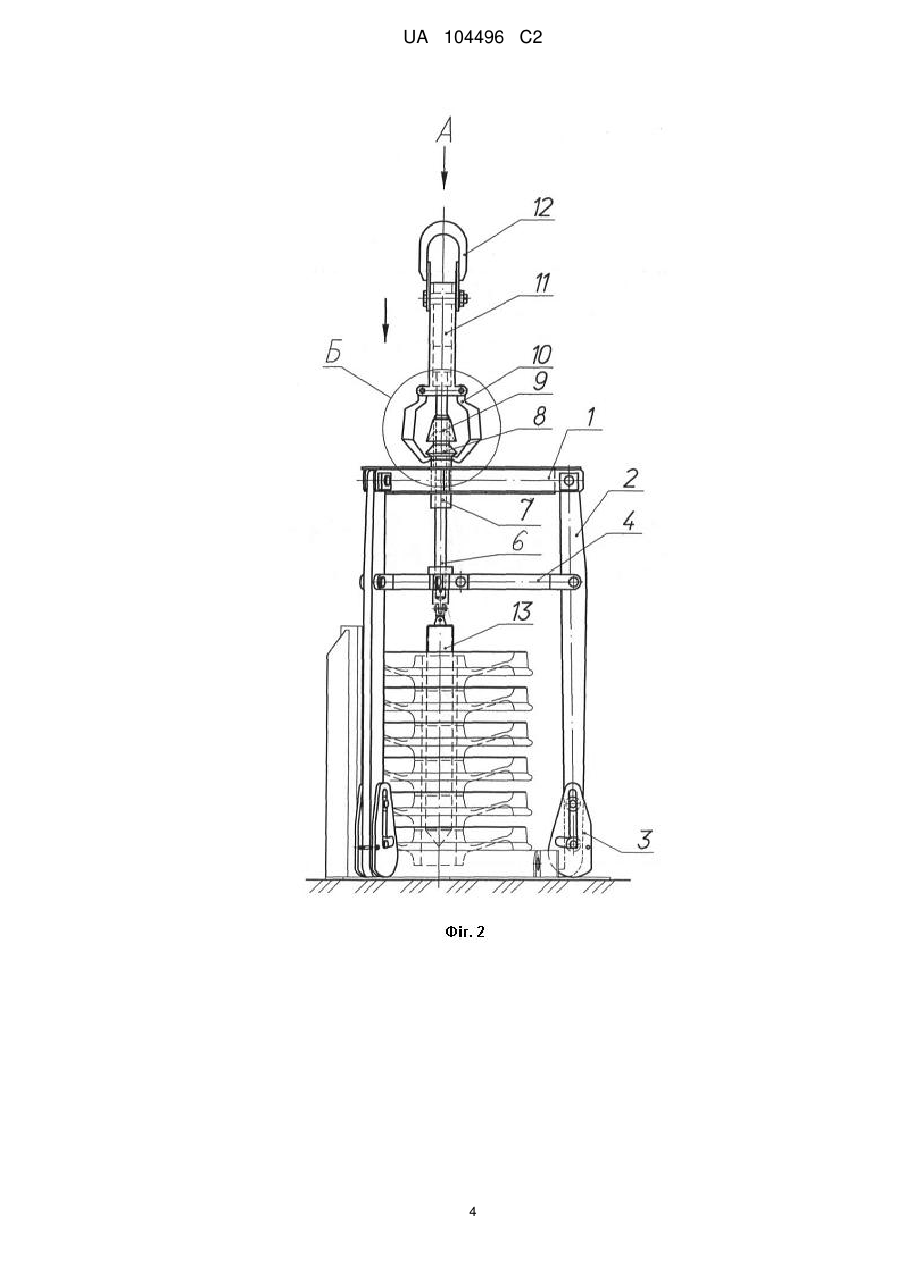
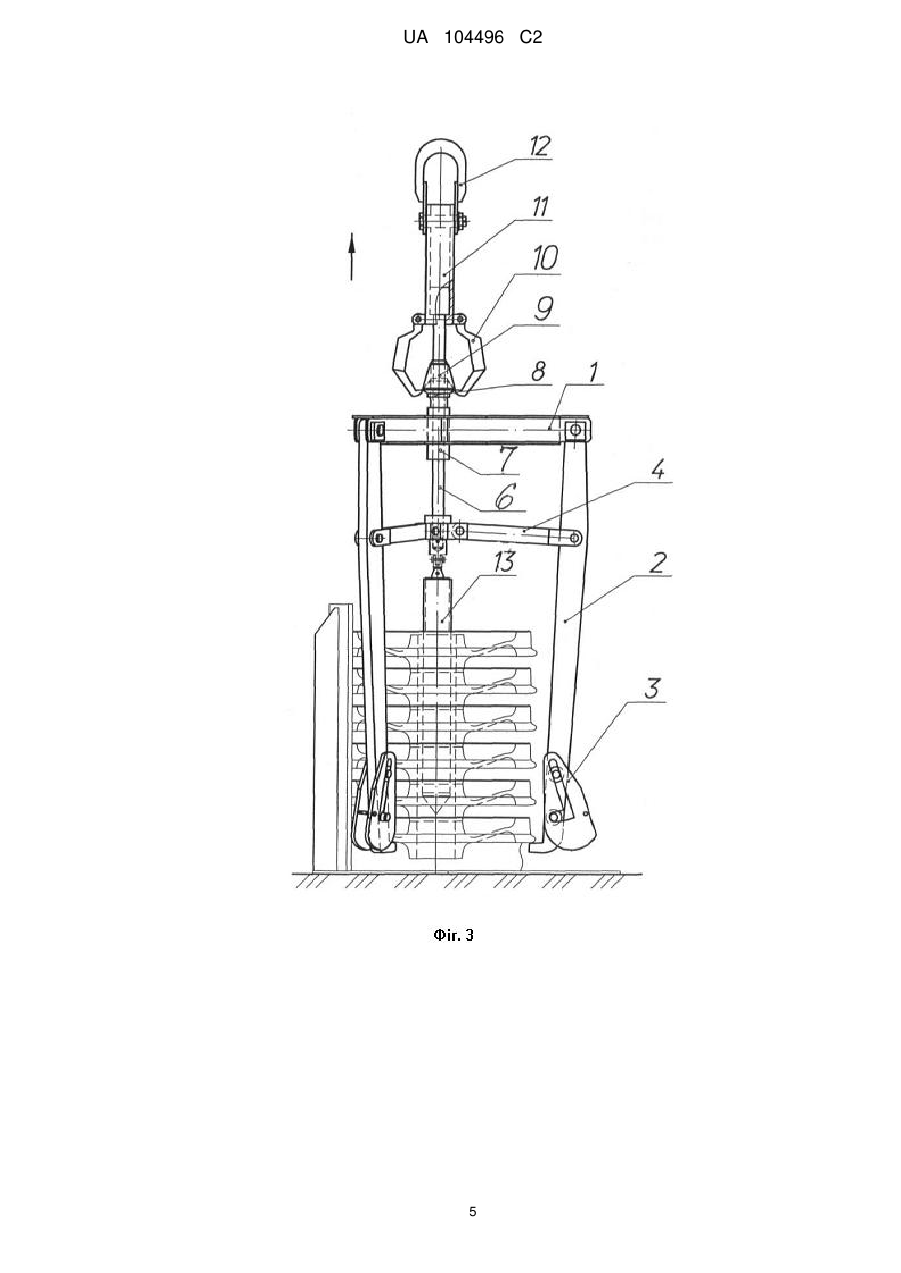
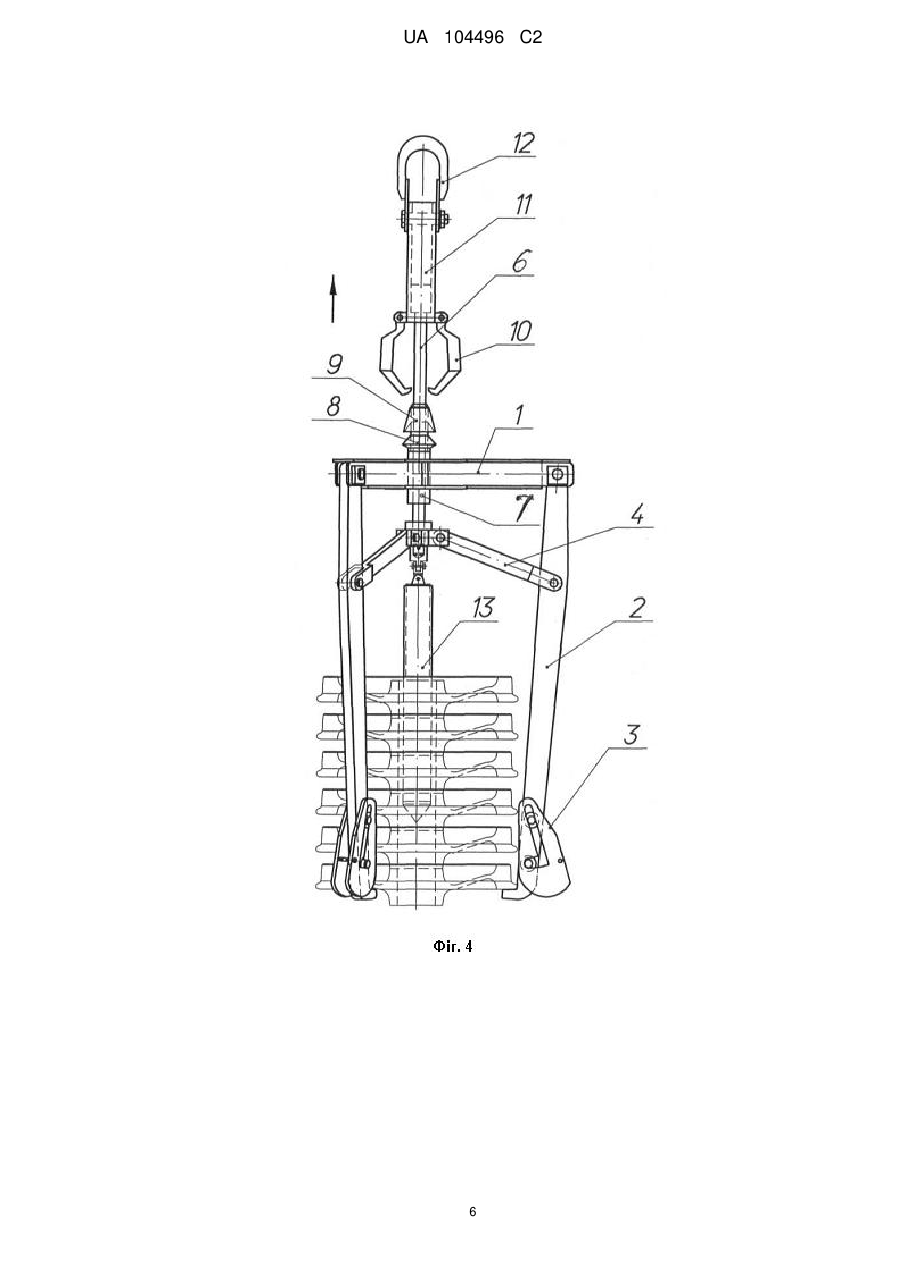
Реферат: Винахід належить до обладнання кранів для підйому вантажів, що укладені в стопу. Вантажозахватний пристрій містить орган захоплення, виконаний у вигляді шарнірно змонтованих на підвісній траверсі механізму підйому L-подібних захватних лап. Привід органа захоплення виконаний у вигляді шарнірно сполучених зовні із захватними лапами стяжок, внутрішні кінці яких шарнірно зв'язані з вертикально рухомим штоком. Останній проходить крізь нерухому гільзу згаданої траверси. Фіксатор положення підготовки до захоплення виконаний у вигляді нижнього рухомого і верхнього нерухомого конусів, що охоплюють гільзу, встановлених з можливістю взаємного контакту своїми конічними поверхнями і фіксації гакоподібними захватами. Захвати змонтовані на стакані, який рухомо охоплює шток, та шарнірно сполученому з сергою механізму підйому. Технічним результатом є захоплення вантажів знизу з підхопленням в напівавтоматичному режимі. UA 104496 C2 (12) UA 104496 C2 UA 104496 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до знімних механічних вантажозахватних пристроїв, пристосованих для використання з механізмами кранів для підйому, опускання і переміщення вантажів, укладених в стопки, а конкретно до жорстких спарених елементів, наприклад L-подібних, для захоплення вантажу з двох або трьох бічних сторін. Вже відомий вантажозахватний пристрій, що включає механізм захоплення вантажів, укладених в стопку, що містить орган захоплення з приводом і фіксатором положення підготовки до захоплення, і механізм підйому вантажу.(Захват для днищ. Робочий проект 1.ТП.4091 від 15.07.1977р.). Проте відомий вантажозахватний пристрій має такі недоліки: не забезпечує захоплення знизу вантажів, укладених в стопки. В основу винаходу поставлена задача забезпечення захоплення знизу вантажів, укладених в стопки, в напівавтоматичному режимі шляхом зміни функціональних можливостей механізму захоплення вантажів, тобто пропоноване технічне рішення забезпечує захоплення стопки вантажів знизу з підхопленням. Поставлена задача вирішується тим, що у вантажозахватному пристрої що включає механізм захоплення вантажів, укладених в стопку, що містить орган захоплення з приводом і фіксатором положення підготовки до захоплення, і механізм підйому, згідно з винаходом, орган захоплення виконаний у вигляді шарнірно змонтованих на підвісній траверсі L-подібних захватних лап, обладнаних внизу поворотними у вертикальній площині відкидними щоками, привід органа захоплення виконаний у вигляді шарнірно сполучених зовні із захватними лапами стяжок, внутрішні кінці яких шарнірно зв'язані з вертикально рухомим штоком, що проходить крізь нерухому гільзу траверси, механізму підйому, а фіксатор положення підготовки до захоплення виконаний у вигляді нижнього рухомого і верхнього нерухомого конусів, що охоплюють гільзу, встановлених з можливістю взаємного контакту своїми конічними поверхнями і фіксації крюкоподібними захватами, змонтованими на стакані, що рухомо охоплює шток, шарнірно сполученому з сергою механізму підйому, що навішується на крюк вантажопідйомного крана. Доцільно до нижнього кінця штока шарнірно прикріпити центруючий стрижень. Крім того, у фіксаторі положення підготовки до захоплення рухомий щодо гільзи траверси, конус встановлений з можливістю вертикального переміщення по гільзі, а нерухомий конус жорстко закріплений на верхній частині гільзи траверси, причому рухомий конус має верхню і нижню зовнішні конічні поверхні, а нерухомий конус має верхню зовнішню конічну поверхню і нижню внутрішню конічну поверхню, призначену для контакту з верхньою зовнішньою поверхнею рухомого конуса. Доведено, що сукупність ознак є причиною, а отримуваний первинний технічний результат "зміна функціональних можливостей механізму захоплення вантажів" - наслідком. У свою чергу, цей первинний технічний результат є причиною, а отримуваний вторинний технічний результат "забезпечення захоплення знизу вантажів, укладених в стопки" - наслідком. Суть винаходу пояснюють креслення. на фіг. 1- вантажозахватний пристрій в опущеному положенні (без вантажу); на фіг.2 - вантажозахватний пристрій в положенні підготовки вантажу до захоплення; на фіг.3- вантажозахватний пристрій в положенні захоплення вантажу перед початком підйому; на фіг.4- вантажозахватний пристрій в положенні підйому; на фіг.5- вантажозахватний пристрій (вид А згідно з фіг.1), на фіг.6- вантажозахватний пристрій (вузол Б згідно з фіг.2). Пропонований вантажозахватний пристрій містить механізм захоплення вантажів і механізм підйому. Механізм захоплення вантажів, укладених в стопку, містить орган захоплення з приводом і фіксатором положення підготовки до захоплення. Орган захоплення виконаний у вигляді шарнірно змонтованих на підвісній траверсі 1 Lподібних захватних лап 2, обладнаних внизу поворотними у вертикальній площині відкидними щоками 3. Привід органа захоплення виконаний у вигляді шарнірно сполучених зовні із захватними лапами стяжок 4, внутрішні кінці 5 яких шарнірно зв'язані вертикально рухомим штоком 6, що проходить крізь нерухому гільзу 7 траверси 1, механізму підйому. Фіксатор положення підготовки до захоплення виконаний у вигляді нижнього рухомого 8 і верхнього нерухомого 9 конусів, що охоплюють гільзу 7. Конуси 8 і 9 встановлені з можливістю взаємного контакту своїми конічними поверхнями і фіксації гакоподібними захватами 10, змонтованими на стакані 11, що охоплює шток 6. Стакан 11 шарнірно сполучений з сергою 12, механізму підйому, навішуваною на гак вантажопідйомного крана (останній на кресленні не показаний). 1 UA 104496 C2 5 10 15 20 25 30 35 40 До нижнього кінця штока 6 шарнірно прикріплений центруючий стрижень 13. Розглянемо детальніше фіксатор положення підготовки до захоплення. Конус 8, рухомий щодо гільзи 7 траверси 1, встановлений з можливістю вертикального переміщення по гільзі 7. Нерухомий конус 9 жорстко закріплений на верхній частині гільзи 7. Рухомий конус 8 має верхню В і нижню Г зовнішні конічні поверхні, а нерухомий конус 9 має верхню Д зовнішню конічну поверхню і нижню Ж внутрішню конічну поверхню, призначену для контакту з верхньою В зовнішньою поверхнею рухомого конуса 8. Шток 6 своїм верхнім кільцевим буртом 14 спирається на дно 15 стакана 11. Пропонований вантажозахватний пристрій працює таким чином. Розглянемо 4 положення пристрою. І - пристрій в опущеному положенні (без вантажу) (фіг. 1). В цей час машиніст вантажопідйомного крана навішує сергу 12 пристрою на гак крана і опускає його в розкритому стані на стопку коліс, що підлягають підйому, до зіткнення захватних лап 2 і відкидних щік 3 з підлогою цеху. При цьому стяжки 4 знаходяться в горизонтальному положенні, щоки 3 ще не відкинулися від лап 2, а гакоподібні захвати 10 вже захопили знизу нерухомий конус 9. У той же час машиніст вантажопідйомного крана опускає в отвір маточини верхнього колеса стопки коліс центруючий стрижень 13, який служить для машиніста крана орієнтиром, показником точності позиціювання вантажозахватного пристрою і в цілому вантажопідйомного крана щодо стопки коліс, що підлягають підйому. II - пристрій в положенні підготовки до захоплення вантажу (фіг.2). В цей час машиніст крана продовжує опускати крюк і разом з ним сергу 12 із стаканом 11 до моменту обхвату захватами 10 рухомого конуса 8 знизу за нижню зовнішню конічну поверхню Г. III - пристрій в положенні захоплення вантажу перед початком підйому (фіг.3). В цей час машиніст крана підводить крюк крана і разом з ним сергу 12 із стаканом 11 і захватами 10 до моменту повного підйому рухомого конуса 8, тобто до зіткнення (контакту) його верхньої зовнішньої конічної поверхні В з нижньою внутрішньою конічною поверхнею Ж нерухомого конуса 9. Одночасно піднімається шток 6 з внутрішніми кінцями 5 стяжок 4. Останні своїми зовнішніми кінцями стягують захватні лапи 2 під нижнім колесом стопки і вантажозахватний пристрій закривається. Щоки 3 починають відкидатися назовні. Центруючий стрижень 13 починає підніматися. IV - пристрій в положенні підйому вантажу (фіг.4). В цей час машиніст крана піднімає гак з сергою 12, стаканом 11 і штоком 6, який своїм кільцевим буртом 14 спирається на дно 15 стакана 11. Вантаж підіймається. При цьому захвати 10 зісковзують з нижньої зовнішньої конічної поверхні Г рухомого конуса 8 і останній під силою своєї ваги опускається в початкове положення. Під час підйому вантажу внутрішні кінці 5 стяжок 4 піднімаються ще вище, завдяки чому зовнішні кінці стягувань 4 ще більш і остаточно стягують внизу захватні лапи 2 під стопкою коліс. Щоки 3 повністю відкинуті назовні. При установці перенесеної стопки коліс на інше місце вищезгадані операції проводять в зворотному порядку. Таким чином, даний пристрій працює в напівавтоматичному режимі. ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Вантажозахватний пристрій, який містить механізм захоплення вантажів, укладених в стопу, що містить орган захоплення з приводом і фіксатором положення підготовки до захоплення, і механізм підйому, який відрізняється тим, що орган захоплення виконаний у вигляді шарнірно змонтованих на підвісній траверсі механізму підйому L-подібних захватних лап, обладнаних внизу поворотними у вертикальній площині відкидними щоками, привід органа захоплення виконаний у вигляді шарнірно сполучених зовні із захватними лапами стяжок, внутрішні кінці яких шарнірно зв'язані з вертикально рухомим штоком, що проходить крізь нерухому гільзу згаданої траверси, а фіксатор положення підготовки до захоплення виконаний у вигляді нижнього рухомого і верхнього нерухомого конусів, що охоплюють гільзу, встановлених з можливістю взаємного контакту своїми конічними поверхнями і фіксації гакоподібними захватами, змонтованими на стакані, який рухомо охоплює шток, шарнірно сполученому з сергою механізму підйому, що навішується на гак вантажопідйомного крана. 2. Пристрій за п. 1, який відрізняється тим, що до нижнього кінця штока шарнірно прикріплений центруючий стрижень. 3. Пристрій за п. 1, який відрізняється тим, що у фіксаторі положення підготовки до захоплення рухомий, щодо гільзи траверси, конус встановлений з можливістю вертикального переміщення 2 UA 104496 C2 по гільзі, а нерухомий конус жорстко закріплений на верхній частині гільзи траверси, причому рухомий конус має верхню і нижню зовнішні конічні поверхні, а нерухомий конус має верхню зовнішню конічну поверхню і нижню внутрішню конічну поверхню, призначену для контакту з верхньою зовнішньою поверхнею рухомого конуса. 3 UA 104496 C2 4 UA 104496 C2 5 UA 104496 C2 6 UA 104496 C2 7 UA 104496 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
Автори англійськоюShabaldak Mykola Vasyliovych
Автори російськоюШабалдак Николай Васильевич
МПК / Мітки
МПК: B66C 1/32
Мітки: пристрій, вантажозахватний
Код посилання
<a href="https://ua.patents.su/10-104496-vantazhozakhvatnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Вантажозахватний пристрій</a>
Вантажозахватний пристрій
Номер патенту: 76123
Опубліковано: 25.12.2012
Автори: Шабалдак Микола Васильович, Себякіна Марина Миколаївна, Гріцан Анатолій Феодосійович
МПК: B66C 1/32
Мітки: пристрій, вантажозахватний
Формула / Реферат:
1. Вантажозахватний пристрій, який містить механізм захоплення вантажів, укладених в стопу, що містить орган захоплення з приводом і фіксатором положення підготовки до захоплення, і механізм підйому, який відрізняється тим, що орган захоплення виконаний у вигляді шарнірно змонтованих на підвісній траверсі L-подібних захватних лап, обладнаних знизу поворотними у вертикальній площині відкидними щоками, привід органу захоплення виконаний у...
Вантажозахватний пристрій
Номер патенту: 77639
Опубліковано: 25.02.2013
Автори: Гріцан Анатолій Феодосійович, Шабалдак Микола Васильович, Лафазан Андрій Олександрович
МПК: B66C 1/30
Мітки: вантажозахватний, пристрій
Формула / Реферат:
1. Вантажозахватний пристрій, що містить механізм захоплення вантажу, який містить орган захвату з приводом і фіксатором положення підготовки до захоплення і механізм підйому вантажу, причому орган захоплення з приводом виконаний у вигляді поворотних відносно нижньої нерухомої траверси двоплечих захватних важелів, верхні плечі яких шарнірно зв'язані з наскрізними пазами верхньої рухомої траверси, а нижні плечі захватних важелів несуть...
Вантажозахватний пристрій
Номер патенту: 29423
Опубліковано: 10.01.2008
Автори: Авраменко Леонід Володимирович, Аріст Леонід Михайлович, Маковенко Анатолій Павлович, Чорний Олександр Микитович
МПК: B66C 1/12
Мітки: пристрій, вантажозахватний
Формула / Реферат:
Вантажозахватний пристрій, що містить траверсу з петлею та вушка з віссю, на якій закріплений крюк, який відрізняється тим, що пристрій обладнаний візком та опорними рамами, встановленими по торцях траверси, причому візок з’єднаний з вушками і виконаний з можливістю переміщення з крюком уподовж траверси, а в опорній рамі, розташованій в зоні петлі, встановлений контрвантаж.
Вантажозахватний пристрій для круглих лісоматеріалів
Номер патенту: 69443
Опубліковано: 25.04.2012
Автори: Лимар Петро Володимирович, Ловейкін Вячеслав Сергійович
МПК: B66C 3/20
Мітки: вантажозахватний, круглих, пристрій, лісоматеріалів
Формула / Реферат:
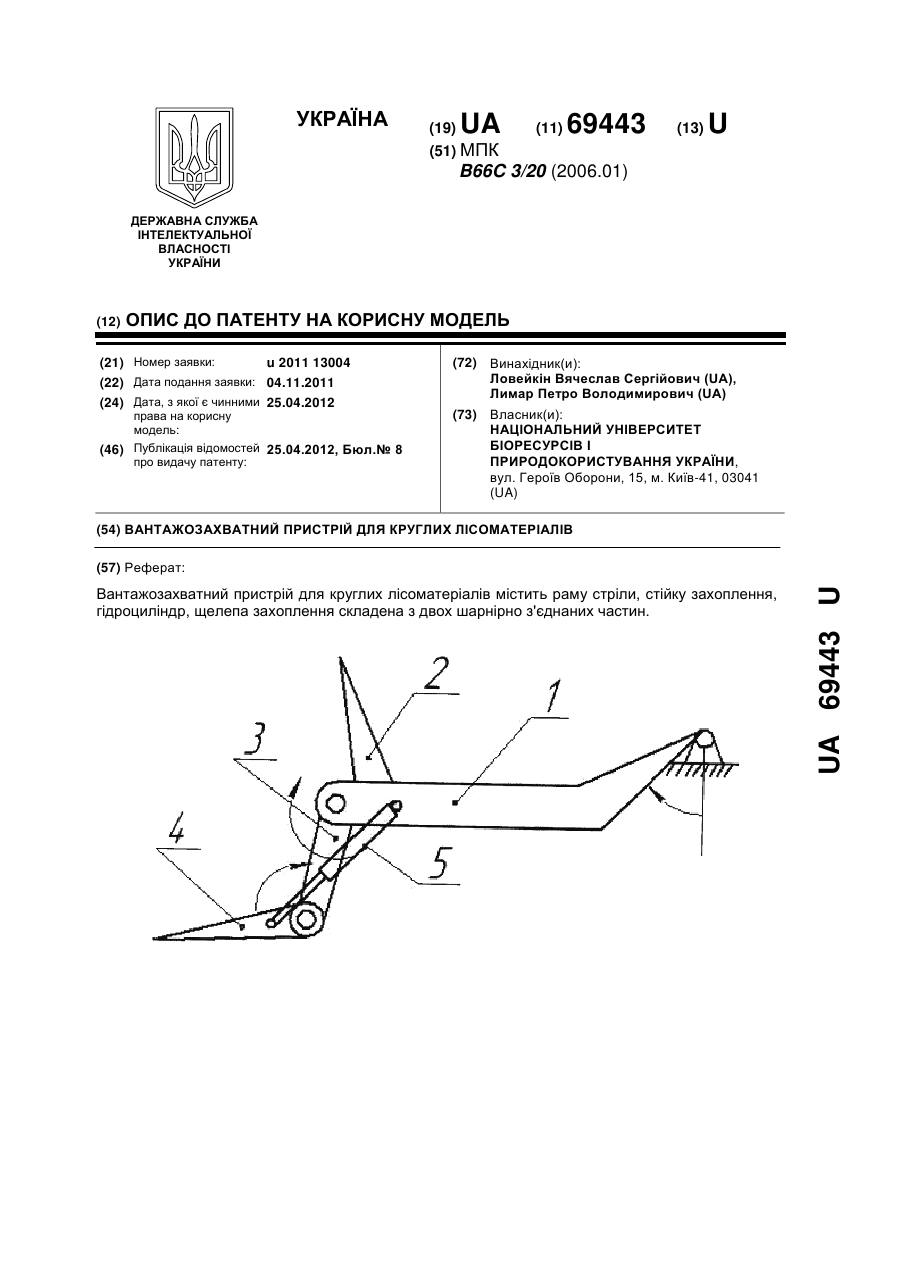
Вантажозахватний пристрій для круглих лісоматеріалів, що містить раму стріли, щелепу з приводом захоплення, стійку захоплення, який відрізняється тим, що щелепа захоплення складається з двох шарнірно з'єднаних частин: передньої частини щелепи і задньої частини щелепи, до того ж передня частина щелепи з'єднана з стрілою за допомогою гідроциліндра.
Вантажозахватний пристрій для кришок контейнера ктз – 3,0
Номер патенту: 14286
Опубліковано: 15.05.2006
Автори: Плотко Олександр Леонідович, Кондратенко Віктор Васильович, Морфіянець Олена Іванівна
МПК: B66C 1/62
Мітки: ктз, кришок, пристрій, вантажозахватний, контейнера
Формула / Реферат:
1. Вантажозахватний пристрій для кришок контейнера КТЗ-3,0, що містить каркас з підвіскою для кріплення до крюка крана, механізм фіксації для автоматичного регулювання захватів, кронштейни, що зв'язані з захватами, захватні важелі, який відрізняється тим, що містить уловлювачі, які являють собою чотири напрямні, приєднані до несучої конструкції.2. Вантажозахватний пристрій для кришок контейнера КТЗ-3,0 за п.1, який відрізняється тим,...
Попередній патент: Стандартизований спосіб експериментальної оцінки побічної токсичності лікувальних чинників
Наступний патент: Спосіб виробництва пшенично-житніх булочок “луганські” з добавкою гідролізату з молюсків
Випадковий патент: Гідролази, кодуючі їх нуклеїнові кислоти і способи їх одержання і застосування