Спосіб поліщука мультиплікації зусилля і пристрій для його здійснення
Формула / Реферат
1. Спосіб мультиплікації зусилля, що включає витиснення рідини, розміщеної в герметичній ємності, що має різні по площі поперечні перерізи, із гідравлічної порожнини меншого перерізу в порожнину більшого перерізу в обсязі, пропорційному відстані дії робочого зусилля, який відрізняється тим, що ємність із рідиною переміщають зусиллям, що підлягає мультиплікації, до моменту часу або до точки в просторі прикладення робочого зусилля, після чого ємність фіксують у нерухомому стані відносно корпуса, а по закінченні процесу мультиплікації зусилля при поверненні у вихідне положення здійснюють фіксацію зазначеної ємності з рідиною відносно провідної ланки, виключивши попередньо фіксацію щодо нерухомого корпуса мультиплікатора.
2. Пристрій для здійснення способу за п. 1, що містить привод провідної ланки мультиплікатора й гідравлічний циліндр, утворений двома різними поперечними перерізами, пристрій фіксації, систему автоматичного керування, який відрізняється тим, що гідравлічний циліндр виконаний у вигляді рухомої герметичної камери, оснащеної фіксуючим пристроєм як для кінематичного зв'язку відносно нерухомого корпусу привода, так і для звільнення рухомої камери при її поверненні у вихідне положення.
3. Пристрій за п. 2, який відрізняється тим, що пристрій фіксації рухомої камери виконано у вигляді електромагнітного фіксатора, взаємодіючого з отворами, виконаними з певним кроком у корпусі рухомої гідравлічної камери.
Текст
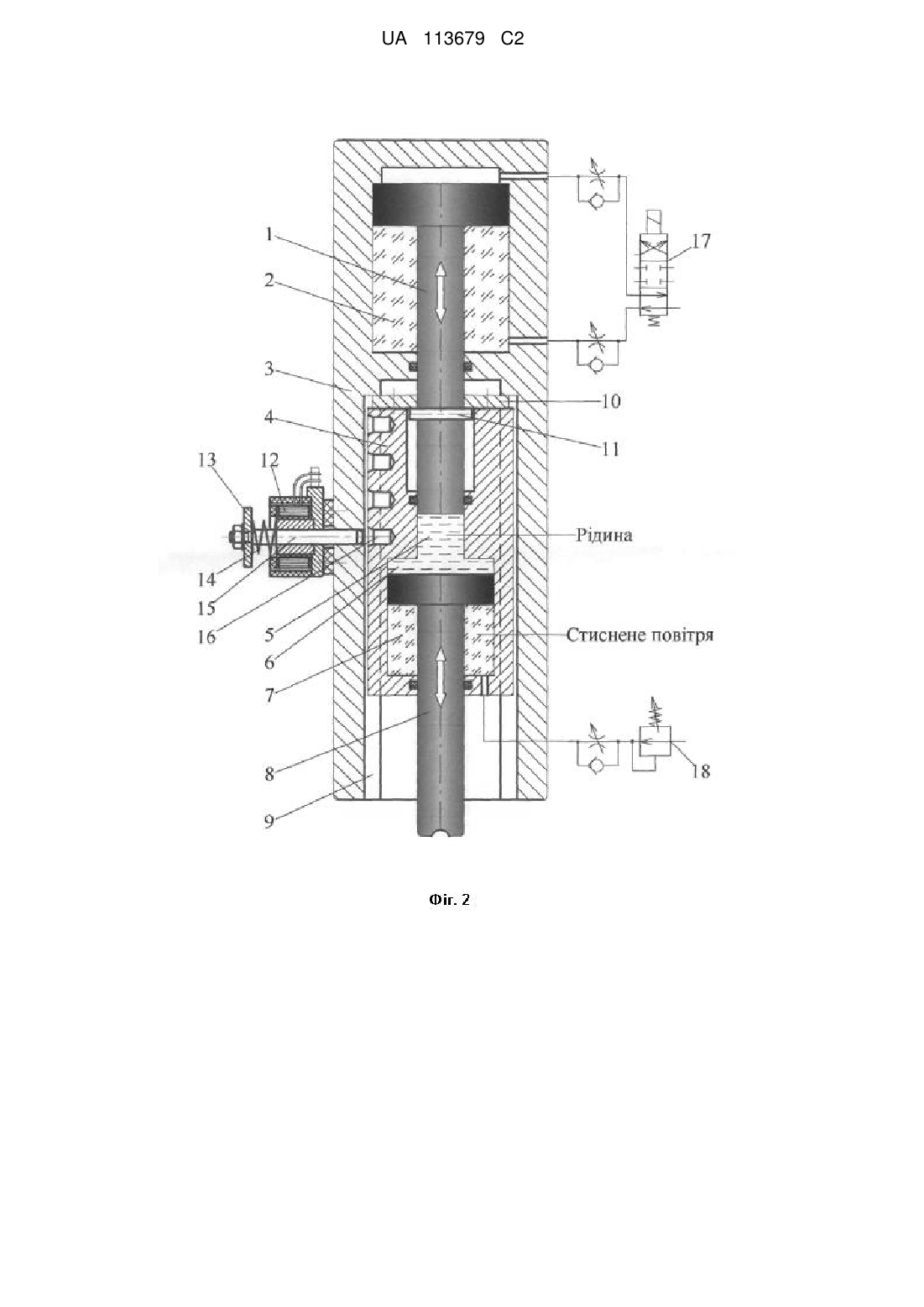
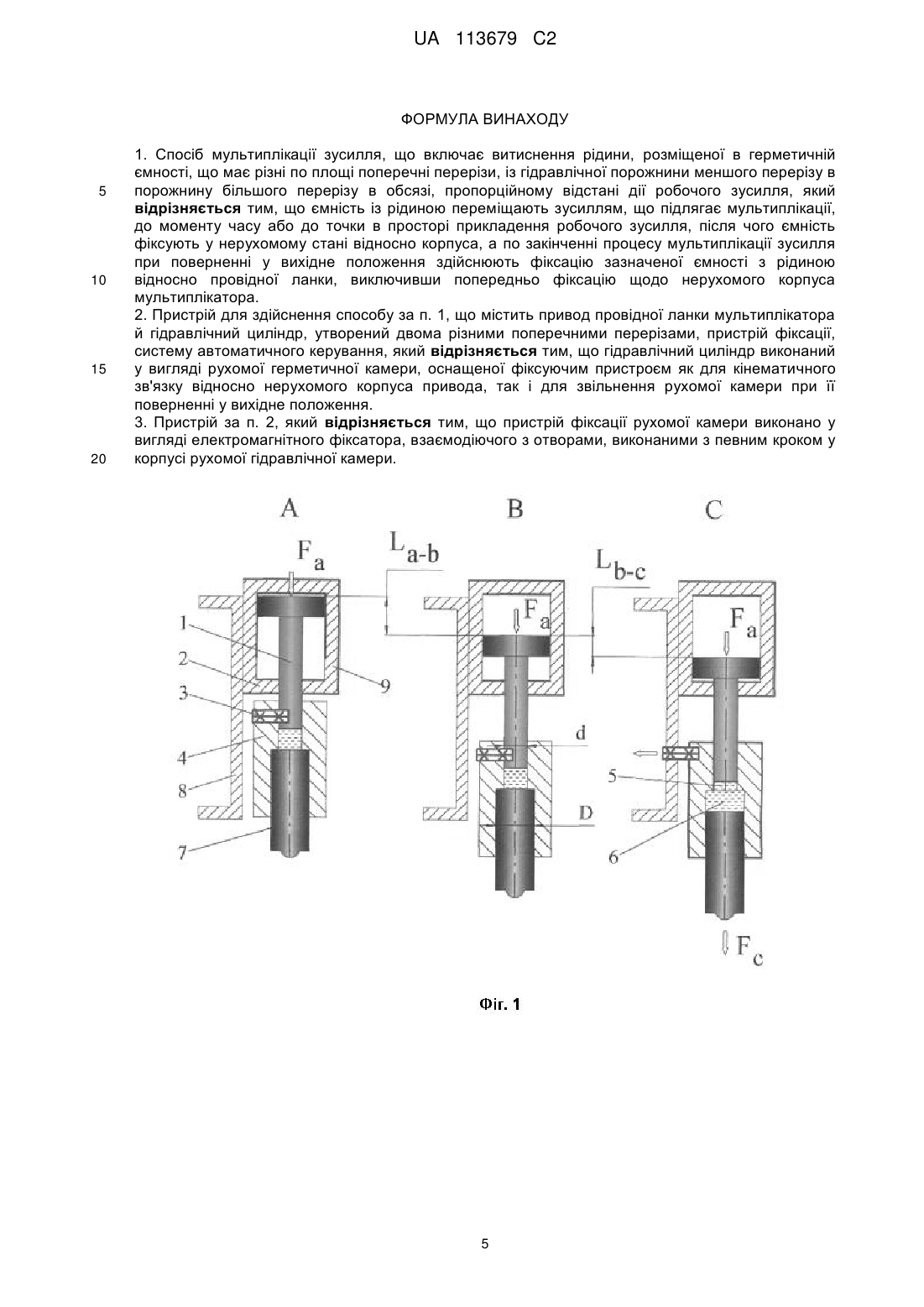
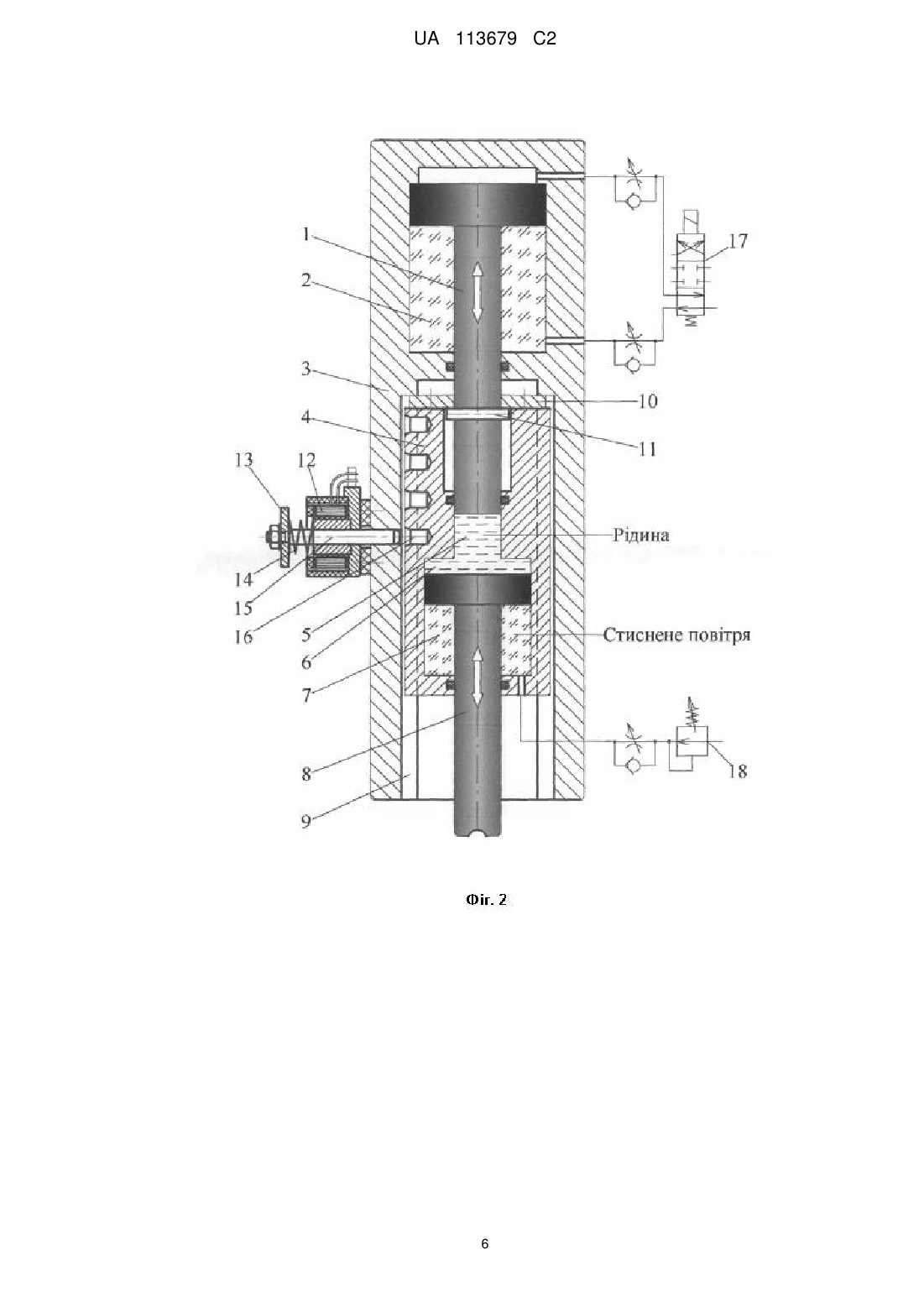
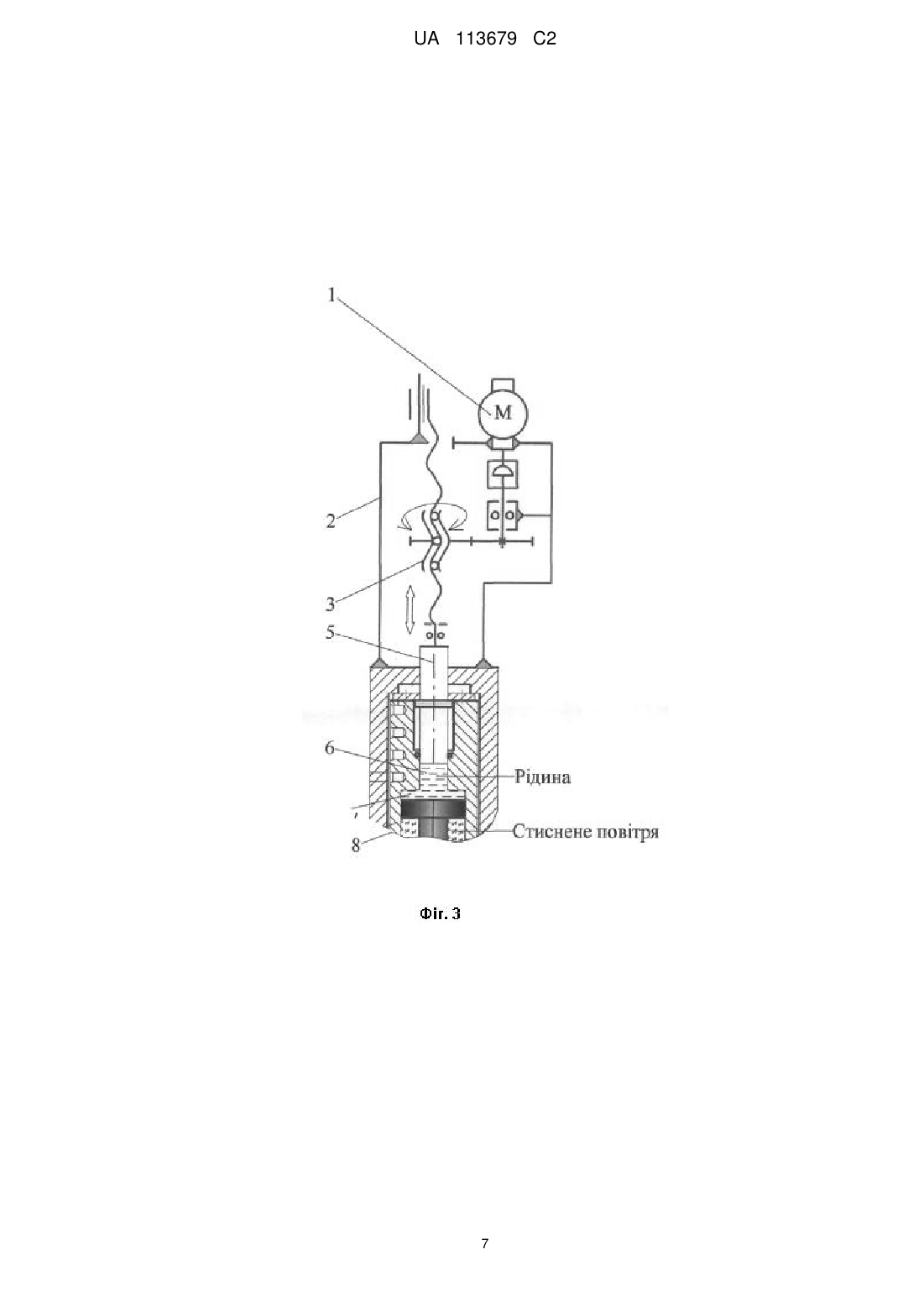
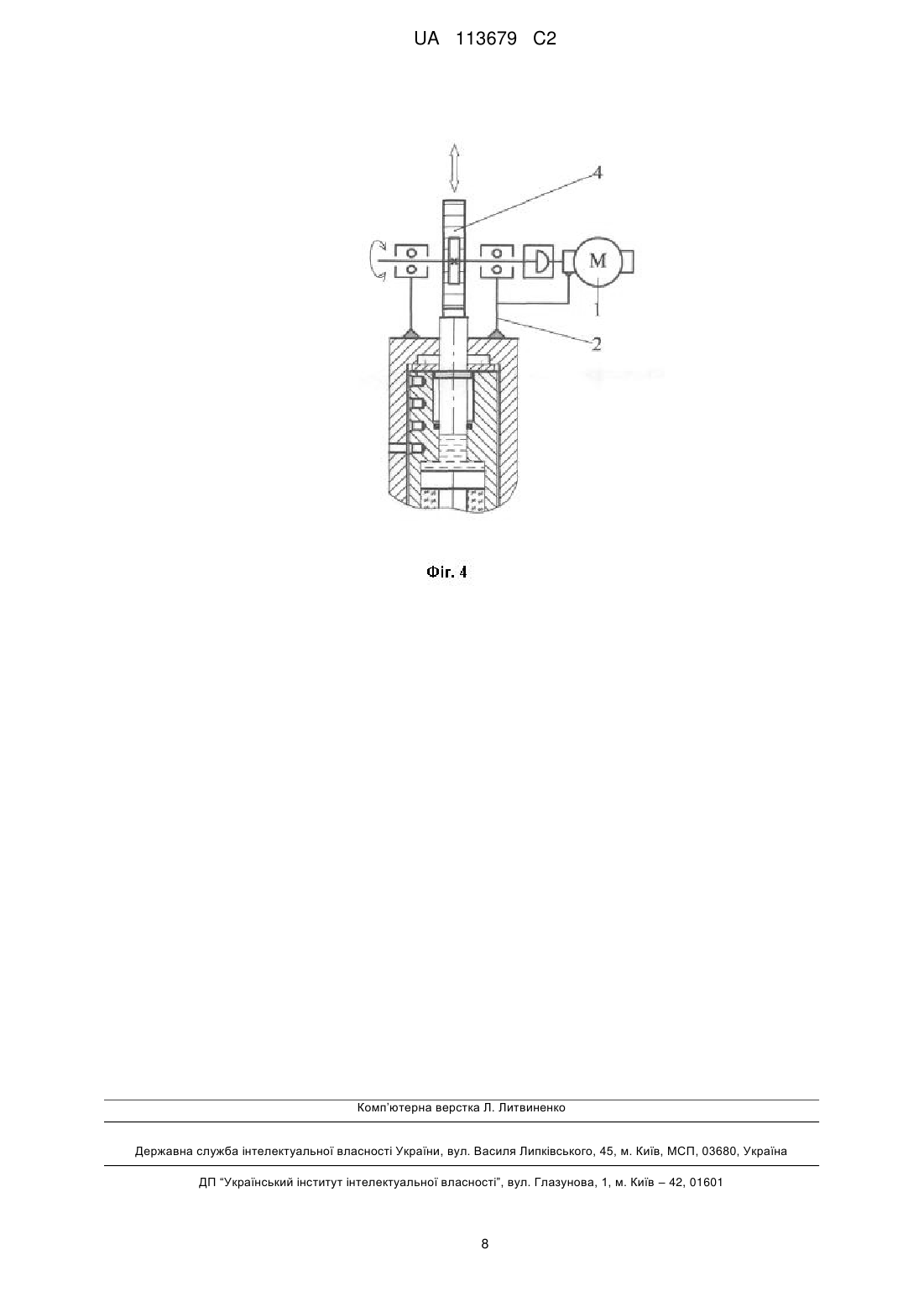
Реферат: Винахід належить до загального машинобудування, а саме до пневмогідравлічних систем загального призначення, зокрема до підсилювачів та перетворювачів тиску текучого середовища. Для підвищення швидкодії способу мультиплікації зусилля при одночасному розширенні технологічних можливостей пристрою для його здійснення згідно зі способом мультиплікації зусилля ємність із рідиною переміщають зусиллям, що підлягає мультиплікації, до моменту часу або до точки в просторі прикладення робочого зусилля, тобто на величину холостого ходу, після чого ємність фіксують відносно нерухомого корпуса, а по закінченні процесу мультиплікації зусилля, тобто часу дії робочого зусилля, при поверненні у вихідне положення здійснюють фіксацію зазначеної ємності з рідиною відносно провідної ланки приводу, виключивши попередньо фіксацію щодо нерухомого корпуса. Пристрій для здійснення запропонованого способу відповідно до винаходу має гідравлічний циліндр виконаний у вигляді рухомої герметичної камери, оснащеної фіксуючим пристроєм як для кінематичного зв'язку відносно нерухомого корпусу привода, так і для звільнення рухомої камери при її поверненні у вихідне положення, причому пристрій фіксації рухомої камери виконано у вигляді електромагнітного фіксатора, взаємодіючого з отворами, виконаними з певним кроком у корпусі рухомої гідравлічної камери. UA 113679 C2 (12) UA 113679 C2 UA 113679 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до загального машинобудування, а саме до пневмогідравлічних систем загального призначення, зокрема до підсилювачів та перетворювачів тиску текучого середовища. Відомий класичний спосіб мультиплікації зусилля робочого приводу, оснований на перетворенні низького тиску стисненого повітря силового циліндра у високий тиск рідини (наприклад, машинного масла) робочого гідроциліндра [1]. Відповідно до цього способу в поршневу порожнину пневматичного циліндра подають стиснене повітря й штоком цього ж циліндра витісняють рідину з гідравлічної порожнини меншого перерізу в порожнину більшого перерізу, у результаті чого, на поршень гідроциліндра (а значить і на технологічний інструмент, установлений на штоку цього гідроциліндра) впливають збільшеним тиском рідини. Величина 2 посилення тиску дорівнює відношенню: K=(D/d) , де: D - діаметр поршня гідроциліндра; d діаметр штока пневматичного циліндра. Значення цього відношення може досягати декількох десятків, що і є основною перевагою пнемогідравлічних приводів. Суттєвим недоліком зазначеного способу є низька швидкість переміщення робочих органів технологічного устаткування, оскільки, як холостий хід (тобто підведення інструмента до об'єкта обробки), так і робочий хід (тобто власний хід обробки) здійснюються під дією зусилля на штоку гідравлічного циліндра, швидкість переміщення якого на порядок менше, ніж пневматичного приводу. Відомо, що при виконанні таких технологічних операцій як клепка, вирубка, карбування й т.п. холостий хід інструмента в багато разів більше робочого ходу. Тому, мультиплікація зусилля до початку технологічного навантаження істотно сповільнює дію приводу. Крім того, потребується в багато разів завищений обсяг рідини в гідроциліндрі, внаслідок того, що зазначений обсяг пропорційний сумі величин холостого й робочого ходів, що є додатковим недоліком зазначеного способу, тому що суттєво збільшує габарити пневмогідравлічного приводу. Найбільш близьким аналогом (прототипом) за способом мультиплікації зусилля є спосіб послідовного пневмогідравлічного посилення [2]. Зазначений спосіб включає дві послідовні стадії: перша - робота підсилювача на низькому тиску (тобто на холостому ходу), при якій впливають стисненим повітрям на робочу рідину через проміжне середовище; друга стадія - робота підсилювача на високому тиску (тобто на робочому ходу), при якій подають стиснене повітря в поршневу порожнину силового циліндра й тим самим, штоком цього ж циліндра витісняють рідину з гідравлічної порожнини меншого перерізу в порожнину більшого перерізу, що й приводить до пневмогідравлічного посилення. Загальною ознакою зі способом-прототипом є те, що мультиплікацію робочого (технологічного) зусилля здійснюють витисненням рідини з порожнини з меншим поперечним перерізом у порожнину з більшим поперечним перерізом при безпосередньому виконанні технологічної операції, а саме на стадії прикладення до об'єкта обробки робочого зусилля (тобто на другій стадії). Таким чином, на відміну від попереднього технічного рішення, забезпечується підвищення швидкодії пневмогідравлічного приводу. Однак, внаслідок того, що першу стадію реалізації способу (тобто етап холостого ходу технологічного інструмента) здійснюють за рахунок роботи гідравлічного приводу (нехай навіть без прикладення робочого навантаження) задача підвищення швидкодії приводу зазначеного типу залишається як і раніше актуальною, що і є суттєвим недоліком розглянутого способу. Це підтверджується тим, що швидкість витікання рідини (наприклад машинного масла) на порядок нижче швидкості стисненого повітря. Відомий гідравлічний трансформатор тиску (Hydraulic pressure transformer) [3], що здійснює мультиплікацію зусилля на виході приводу за допомогою пневмогідравлічного посилення. Даний пристрій містить три послідовно розташованих циліндри (камери): пневматичний, гідравлічний і знову пневматичний. При цьому перший пневматичний циліндр розділений з гідравлічною порожниною підпружиненим поршнем без штока. На першій стадії (тобто в період холостого ходу) за допомогою другого із зазначених пневматичних циліндрів здійснюють підведення інструмента до об'єкта обробки й одночасно під дією підпружиненого поршня витісняють рідину з першої камери в порожнину гідравлічного циліндра. На другій стадії роботи, тобто в період прикладення технологічного зусилля до об'єкта обробки, за допомогою включення першого (із зазначених вище) пневматичного приводу його штоком витісняють рідину з гідравлічної порожнини меншого перерізу в порожнину більшого перерізу, у результаті чого й відбувається пневмогідравлічне посилення. Інакше кажучи, здійснюють мультиплікацію технологічного зусилля в десятки разів. Аналогічні принцип дії та пристрій відомого гідропневматичного підсилювача тиску [4] і гідропневматичного трансформатора тиску [5]. Відмінність останніх двох технічних рішень від джерела [3] складається у відсутності пружини на поршні, що розділяє перший пневматичний 1 UA 113679 C2 5 10 15 20 25 30 35 40 45 50 55 60 циліндр із гідравлічною порожниною. А витиснення рідини в процесі пневмогідравлічного посилення здійснюється під дією пневматичного приводу. У порівнянні з технічним рішенням джерела [2] останні три пристрої [3, 4, 5] дозволяють підвищити швидкодію приводу, оскільки проходження дистанції холостого ходу здійснюється за рахунок дії пневматичного приводу другого ступеня. Однак при цьому одночасно здійснюється й витиснення рідини в процесі пневмогідравлічного посилення з однієї порожнини в іншу, що супроводжується гідравлічним тертям, а значить гальмуванням пневматичного приводу. Інакше кажучи, знижується швидкодія пневмогідравлічного приводу внаслідок обмеження по швидкості гідравлічного потоку, що є суттєвим недоліком описаних технічних рішень. Це підтверджується й тим, що у випадку надання гідравлічному потоку швидкості пневматичного приводу будуть мати місце такі негативні явища як кавітація рідини й підвищене зношування гідравлічних ущільнень, що не припустимо. Таким чином, задача підвищення швидкодії пневмогідравлічного мультиплікатора як і раніше залишаються актуальною. Найбільш близьким аналогом (прототипом) до заявленого пристрою для здійснення способу мультиплікації зусилля є пневмогідравлічний привід [6], що містить циліндри великого й малого діаметра, жорстко з'єднанні між собою, і маючі загальний робочий шток. Останній пов'язаний з поршнем великого циліндра (точніше підсилювача діафрагменного типу) за допомогою пристрою, що самозаклинює. Загальною ознакою з пристроєм-прототипом є наявність фіксуючого механізму, що здійснює в момент прикладення робочого навантаження (тобто на початку мультиплікації технологічного зусилля) жорсткий зв'язок між приводами холостого й робочого ходів. Ця властивість на відміну від попередніх технічних рішень дозволяє усунути обмеження по швидкості привода холостого ходу, що, безумовно, підвищує швидкодію пневмогідравлічного підсилювача. Однак, наявність постійного жорсткого зв'язку між циліндрами приводів холостого й робочого ходів обмежує технологічні можливості підсилювача, оскільки при зміні типорозміру об'єкта обробки (наприклад, заклепок, глибини вирубки, карбування й т.п.) обоє зазначені циліндри не можуть змінити положення відносно один одного. Крім того, відомо, що хід діафрагменних пневмоциліндрів дуже малий - він змінюється в межах від 0,07D для пласких і до 0,3D для тарілчастих діафрагм (де D - діаметр діафрагми). У сукупності обоє відзначених недоліки суттєво обмежують технологічні можливості розглянутого пристрою як мультиплікатора зусилля. Задачею винаходу є підвищення швидкодії мультиплікації зусилля при одночасному розширенні технологічних можливостей пристрою для його здійснення. Технічний результат досягається тим, що в способі мультиплікації зусилля, що включає витиснення рідини з гідравлічної порожнини меншого перерізу в порожнину більшого перерізу під час виконання технологічної операції, відповідно до винаходу ємність із рідиною переміщають зусиллям, що підлягає мультиплікації, до моменту часу або до точки в просторі прикладення робочого зусилля, тобто на величину холостого ходу, після чого ємність фіксують відносно нерухомого корпусу (основи), а по закінченні процесу мультиплікації зусилля (тобто часу дії робочого зусилля) при поверненні у вихідне положення здійснюють фіксацію зазначеної ємності з рідиною відносно провідної ланки приводу, виключивши попередньо фіксацію щодо нерухомого корпусу (основи). Технічний результат досягається також тим, що в пристрої для здійснення запропонованого способу мультиплікації зусилля, що містить пневматичний і гідравлічний циліндр, утворений двома різними поперечними перерізами, пристрій фіксації, систему автоматичного керування, відповідно до винаходу гідравлічний циліндр виконаний у вигляді рухомої герметичної камери, оснащеної фіксуючим пристроєм, як для кінематичного зв'язку відносно нерухомого корпусу привода, так і для звільнення рухомої камери при її поверненні у вихідне положення. Приведені ознаки винаходу є суттєвими, бо в сукупності достатні для рішення поставлених задач - підвищення швидкодії та розширення технологічних можливостей мультиплікатора зусилля, а кожний нарізно необхідний для ідентифікації і відмінностей способу й пристрою для його здійснення, що заявляються, від відомих в техніці аналогічних технічних рішень. Таким чином, нова сукупність загальних (відомих) і відмітних (нових) від прототипів суттєвих ознак, якими характеризується нове технічне рішення, є достатньою у всіх випадках, на які розповсюджується об'єм правового захисту, оскільки вирішує поставлені задачі. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак і результатом, що досягається, полягає в наступному. Завдяки тому, що відповідно до винаходу герметичну ємність із рідиною переміщають зусиллям, що підлягає мультиплікації, до моменту часу або до точки в просторі прикладення робочого зусилля, тобто на величину холостого ходу, досягається підвищення швидкодії 2 UA 113679 C2 5 10 15 20 25 30 35 40 45 50 55 60 мультиплікації зусилля, оскільки виключається обмеження по швидкості, властиве гідравлічному приводу. А перемикання фіксації зазначеної ємності на нерухомий корпус приводу дозволяє здійснювати мультиплікацію зусилля тільки на ділянці прикладення технологічного зусилля. І, навпаки, перемикання фіксації рухомої гідравлічної камери вже по закінченні процесу мультиплікації зусилля на провідну ланку приводу дозволяє здійснювати зворотний холостий хід, тобто повернення у вихідне положення, без участі гідравлічного приводу, що також сприяє скороченню часу технологічного циклу, а значить підвищенню швидкодії пневмогідравлічних перетворювачів. Виконання гідравлічного циліндра у вигляді рухомої герметичної камери, оснащеної фіксуючим пристроєм як для кінематичного зв'язку відносно нерухомого корпусу привода, так і для звільнення рухомої камери при її поверненні у вихідне положення істотно розширює технологічні можливості пристрою, здійснюючого мультиплікацію зусилля, оскільки відсутній жорсткий постійний зв'язок силового й робочого приводів. Спосіб здійснюють наступним чином. На фіг. 1 показані три стадії реалізації способу мультиплікації зусилля: A - вихідне положення; В - стадія холостого ходу; С - стадія робочого ходу, тобто мультиплікації зусилля. У вихідному положенні провідну ланку мультиплікатора зусилля, наприклад шток 1 пневматичного циліндра 2, фіксують пристроєм 3 відносно рухомої гідравлічної камери 4, що має порожнини низького тиску 5 і високого тиску 6, утворені стінками рухомої камери 4 і торцями провідної ланки 1 і відомої ланки 7. Далі, на етапі "B" подають стиснене повітря в поршневу порожнину пневмоциліндра 9, у результаті чого зусиллям F a, що підлягає мультиплікації (посиленню) переміщають провідну ланку 1 і рухому камеру 4 на величину холостого ходу L a-b. При цьому рідке середовище (наприклад, машинне масло) залишається в порожнині меншого перерізу 5. При досягненні відомої ланки 7 об'єкта обробки пристроєм 3 фіксують камеру 4 відносно нерухомого корпуса 8. Після чого, на наступному етапі "С" - робочого ходу, провідною ланкою 1 витісняють рідке середовище з порожнини меншого перерізу 5 у гідравлічну порожнину більшого перерізу 6. У результаті чого, відбувається мультиплікація робочого зусилля до 2 значення Fс=Fa (D/d) , де: D - діаметр поршня гідроциліндра, тобто відомої ланки 7; d - діаметр штока пневматичного циліндра, тобто провідної ланки 1. Зусиллям F с здійснюють технологічну операцію (наприклад, клепку, вирубку, карбування й т.п.). Таким чином, завдяки переміщенню герметичної камери 4 на величину холостого ходу провідною ланкою 1 зі швидкістю пневматичного приводу й наступної фіксації зазначеної камери відносно нерухомого корпуса 8 для виконання мультиплікації зусилля привода, підвищується швидкодія мультиплікатора зусилля, тому що етап холостого ходу мультиплікатора не обмежений швидкістю перетікання рідкого середовища с одної порожнини в іншу. Пристрій для здійснення способу пояснюється кресленнями. На фіг. 2 зображений пристрій пневмогідравлічний мультиплікатор зусилля; на фіг. 3 і фіг. 4 показані схеми електромеханічних приводів провідної ланки мультиплікатора зусилля у вигляді кулькогвинтової і зубчаторейкової передач, відповідно. Пневмогідравлічний мультиплікатор містить провідну ланку у вигляді штока 1 (фіг. 2) пневматичного циліндра 2, розміщеного в нерухомому корпусі 3, у якому також розміщена рухома гідравлічна камера 4, що має порожнини меншого перерізу 5 і більшого перерізу 6, а також пневматичну порожнину 7 із відомою ланкою мультиплікатора у вигляді штока 8. Рухома камера 4, будучи встановлена в напрямних 9, через кришку 10 і штифт 11 з'єднана із провідною ланкою мультиплікатора - штоком 1. На корпусі 3 закріплений електромагніт 12, взаємодіючий через ярмо 13 і пружину 14 з фіксатором 15, розташованим напроти отворів 16, виконаних з певним кроком у камері 4. Число отворів 16 і крок їхнього розташування визначається довжиною холостого ходу мультиплікатора. Пневматичний циліндр 2 оснащений керуючим електромагнітним пневматичним розподілювачем 17, а порожнина 7 - пневматичним клапаном 18. Обидва керуючих пристрої оснащені відповідними дроселями й зворотними клапанами, як це показано на пневматичній схемі фіг. 2. Пристрій для здійснення вище описаного способу мультиплікації зусилля працює наступним чином. У вихідному положенні мультиплікатора в штоковій порожнині пневматичного циліндра 2 і порожнині 7 створюється тиск стисненого повітря. Завдяки чому відома ланка - шток 8, через рідке середовище, розміщене в порожнині 5, притискає штифтом 11 провідну ланку - шток 1 до кришки 10 камери 4. У такий спосіб здійснюється фіксація рухомої камери 4 відносно провідної ланки мультиплікатора штока 1. Далі через пневматичний розподілювач 17 штокова порожнина циліндра 2 з'єднується з атмосферою, а в його поршневу порожнину подається стиснене 3 UA 113679 C2 5 10 15 20 25 30 35 40 45 50 55 повітря. У результаті відбувається переміщення провідної ланки мультиплікатора - штока 1 з гідравлічною камерою 4 відносно нерухомого корпуса 3, тобто здійснюється холостий хід мультиплікатора, а саме: швидкісне підведення штока 8 із установленим на ньому технологічним інструментом (на кресленні не показано) до об'єкта обробки. При досягненні штока 8 об'єкта обробки (тобто по завершенні холостого ходу) включається електромагніт 12, що, переборюючи зусилля пружини 14, притягає до себе ярмо 13, і тим самим уводить фіксатор 15 в один з отворів 16. Відбувається фіксація рухомої камери 4 відносно нерухомого корпуса 3. Одночасно пневматичний клапан 18 з'єднує порожнину 7 з атмосферою для випуску з неї стисненого повітря. При подальшому переміщенні штока 1 відбувається витиснення рідини (машинного масла) з порожнини меншого перерізу 5 у порожнину більшого перерізу 6, тобто відбувається мультиплікація робочого зусилля, необхідного для виконання технологічної операції. По закінченні останньої відключають електромагніт 12, фіксатор 15 під дією пружини 14 виходить із отвору 16, тим самим звільняючи камеру 4 від фіксації з нерухомим корпусом 3. Після чого, подачею стисненого повітря через клапан 18 у порожнину 7 і повернення рідини з порожнини 6 у порожнину 5, знову фіксують камеру 4 відносно провідної ланки мультиплікатора - штока 1, упираючи штифт 11 у кришку 10. А після випуску стисненого повітря через пневматичний розподілювач 17 з поршневої порожнини й створення тиску в штоковій порожнині циліндра 2 шток 1 (провідна ланка), камера 4 і шток 8 (відома ланка) з технологічним інструментом повертаються у вихідне положення. Далі цикл повторюється. Таким чином, завдяки оснащенню мультиплікатора рухомою гідравлічною камерою й можливості її почергової фіксації відносно як провідної ланки на стадіях холостого ходу мультиплікатора, так і відносно нерухомого корпуса на стадії виконання технологічної операції, надається можливим суттєво підвищити швидкодію й розширити технологічні можливості мультиплікатора зусилля. Винахід не обмежується описаними й показаними на графічних зображеннях варіантами реалізації, але може бити змінений, модифікований й доповнений в рамках об'єму, визначеного формулою винаходу. Так привод першого ступеня мультиплікатора у вигляді пневматичного циліндра 2 (фіг. 2) може бути замінений на електромеханічний привод 1 (фіг. 3, 4), установлений на нерухомому корпусі 2 і оснащений кулькогвинтовою 3 (фіг. 3) або зубчаторейковою передачею 4 (фіг. 4), або будь-якою іншою, що надає провідній ланці 5 мультиплікатора поступальний рух для витиснення рідини з порожнини меншого перерізу 6 у порожнину більшого перерізу 7 рухомої гідравлічної камери 8. Оскільки зазначений електромеханічний привод може бути оснащений цифровою або аналоговою системою керування, то в останніх двох виконаннях надається можливість завдання довільних по величині ходів провідної ланки мультиплікатора. Такі рішення тільки сприяють розширенню технологічних можливостей пристрою для здійснення способу мультиплікації, що заявляється. Також, у випадках малої величини холостого ходу, для спрощення конструкції пристрою замість пневматичних циліндрів з порожнинами 2 й 7 (фіг. 2), припустима установка пружних елементів - пружин стиснення, які будуть забезпечувати повернення пристрою у вихідне положення, що не змінює суті винаходу, а є тільки ще одним видом виконання пристрою. Винахід може бути реалізовано в умовах промислового виробництва з використанням стандартного встаткування, сучасних матеріалів і технологій на будь-якому машинобудівному підприємстві. Джерела інформації: 1. Краткий справочник металлиста /[авт. кол.: А.Н. Малов, А.И. Якушев, В.П. Законников и др.], - М.: "Машиностроение", 1971. - с. 232, табл. 33. 2. Патент RU 2311297 МПК B30B15/00; F15B3/00. Способ последовательного пневмогидравлического усиления; заяв. 23.11.2005, опубл. 27.11.2007. 3. Патент US 5381661 МПК F15B 7/00. Гидравлический трансформатор давления (Hydraulic pressure transformer); заяв. 02.07.1993, опубл. 17.01.1995. 4. Патент EP 0579037 МПК F15B 3/00, F15B 11/06. Гидропневматический усилитель давления (Hydropneumatic pressure intensifier); заяв. 30.06.1993, опубл. 19.01.1994. 5. Патент US 5377488 МПК F15B 7/00. Гидропневматический трансформатор давления (Hydro-pneumatic pressure transformer); завл. 02.07.1993, опубл. 03.01.1995. 6. Авторское свидетельство СССР № 580364 МПК F15B 3/00. Пневмогидравлический привод; заяв. 05.04.1973, опубл. 15.11.1977. Бюл. № 42. 60 4 UA 113679 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 1. Спосіб мультиплікації зусилля, що включає витиснення рідини, розміщеної в герметичній ємності, що має різні по площі поперечні перерізи, із гідравлічної порожнини меншого перерізу в порожнину більшого перерізу в обсязі, пропорційному відстані дії робочого зусилля, який відрізняється тим, що ємність із рідиною переміщають зусиллям, що підлягає мультиплікації, до моменту часу або до точки в просторі прикладення робочого зусилля, після чого ємність фіксують у нерухомому стані відносно корпуса, а по закінченні процесу мультиплікації зусилля при поверненні у вихідне положення здійснюють фіксацію зазначеної ємності з рідиною відносно провідної ланки, виключивши попередньо фіксацію щодо нерухомого корпуса мультиплікатора. 2. Пристрій для здійснення способу за п. 1, що містить привод провідної ланки мультиплікатора й гідравлічний циліндр, утворений двома різними поперечними перерізами, пристрій фіксації, систему автоматичного керування, який відрізняється тим, що гідравлічний циліндр виконаний у вигляді рухомої герметичної камери, оснащеної фіксуючим пристроєм як для кінематичного зв'язку відносно нерухомого корпуса привода, так і для звільнення рухомої камери при її поверненні у вихідне положення. 3. Пристрій за п. 2, який відрізняється тим, що пристрій фіксації рухомої камери виконано у вигляді електромагнітного фіксатора, взаємодіючого з отворами, виконаними з певним кроком у корпусі рухомої гідравлічної камери. 5 UA 113679 C2 6 UA 113679 C2 7 UA 113679 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: поліщука, зусилля, мультиплікації, пристрій, здійснення, спосіб
Код посилання
<a href="https://ua.patents.su/10-113679-sposib-polishhuka-multiplikaci-zusillya-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб поліщука мультиплікації зусилля і пристрій для його здійснення</a>
Спосіб підвищення зусилля ступенів трициліндрового гідравлічного преса

Номер патенту: 48860
Опубліковано: 12.04.2010
Автор: Корчак Олена Сергіївна
МПК: B21B 15/00
Мітки: зусилля, трициліндрового, підвищення, гідравлічного, спосіб, преса, ступенів
Формула / Реферат:
Спосіб підвищення зусилля ступенів трициліндрового гідравлічного преса шляхом підведення рідини високого тиску від акумулятора і рідини підвищеного тиску від проміжного мультиплікатора та її витрати для забезпечення здійснення технологічного процесу, який відрізняється тим, що підвищується зусилля центрального циліндра шляхом збільшення поперечної площі його внутрішньої порожнини згідно з залежністю Sc=k·S, де S, Sc - вихідна та збільшена...
Спосіб збільшення кількості ступенів гідравлічного преса та їх зусилля
Номер патенту: 48918
Опубліковано: 12.04.2010
Автор: Корчак Олена Сергіївна
МПК: B21B 15/00
Мітки: ступенів, зусилля, гідравлічного, преса, спосіб, кількості, збільшення
Формула / Реферат:
Спосіб збільшення кількості ступенів гідравлічного преса та їх зусилля, що включає підведення рідини високого тиску від акумулятора і рідини підвищеного тиску від проміжного мультиплікатора та її витрату для забезпечення здійснення технологічного процесу, який відрізняється тим, що при роботі на найвищому ступені зусиль, коли задіяні всі три циліндри, робоча рідина до циліндрів підводиться з можливістю отримання різних тисків в центральному...
Спосіб підвищення зусилля гідравлічного преса
Номер патенту: 51508
Опубліковано: 26.07.2010
Автор: Корчак Олена Сергіївна
МПК: B21B 15/00
Мітки: підвищення, зусилля, гідравлічного, преса, спосіб
Формула / Реферат:
Спосіб підвищення зусилля гідравлічного преса збереженням загального компонування базових деталей, зіставлянням значень еквівалентних напруг на внутрішній поверхні циліндра при підвищенні зусилля преса шляхом збільшення тиску робочої рідини і внутрішнього діаметра при прийнятті як узагальненого параметра зусилля робочого циліндра, який відрізняється тим, що враховується зростання напруг в направляючих колонах преса, особливо в межах гранично...
Спосіб регулювання тягового зусилля приводу катапульти

Номер патенту: 65105
Опубліковано: 25.11.2011
Автори: Середа Владислав Олександрович, Амброжевич Олександр Володимирович
МПК: B64F 1/00
Мітки: приводу, зусилля, спосіб, тягового, катапульти, регулювання
Формула / Реферат:
1. Спосіб регулювання тягового зусилля приводу катапульти при запуску безпілотного літального апарата, згідно з яким квазісталий рівень тягового зусилля підтримують шляхом часткового використання енергії розширюваного тіла за рахунок змінення робочої площі, яка передає цю енергію трансмісії, який відрізняється тим, що робочу площу трансмісії підсумовують шляхом послідовного підключення ланок телескопа, що сприймають навантаження.
Спосіб теплової мультиплікації енергії вітроустановок
Номер патенту: 84919
Опубліковано: 10.12.2008
Автори: Небилиця Юрій Миколайович, Небилиця Катерина Сергіївна
Мітки: спосіб, мультиплікації, теплової, енергії, вітроустановок
Формула / Реферат:
1. Спосіб перетворення енергії вітру в енергію стисненого повітря з наступним його накопиченням та використанням, зокрема, для перетворення в механічний момент чи електричну енергію, який відрізняється тим, що здійснюється допоміжний абсорбційний паросиловий цикл, завдяки якому теплота процесу стиснення повітря основного циклу перетворюється у додатковий механічний момент, який може бути направлений на покриття втрат основного циклу чи...
Попередній патент: Обгортка курильного виробу
Наступний патент: Спосіб вимірювання концентрації речовин у середовищі
Випадковий патент: Пристрій для вимірювання напруженості імпульсного електричного поля