Спосіб визначення місцеположення джерел радіовипромінювання і система для його здійснення
Номер патенту: 21335
Опубліковано: 02.12.1997
Автори: Сирма Олексій Олексійович, Литвиненко Валентин Іванович, Муратов Олександр Олексійович, Лігінов Сергій Михайлович, Мєдвєдєв Сергій Леонідович, Гудзюк Василь Петрович
Формула / Реферат
1. Способ определения местоположения источников радиоизлучения, заключающийся в приеме сигнала в N пространственно разнесенных измерительных приемных пунктах, идентичных по составу, с известными координатами, причем N больше или равно 2, один из которых является центральным измерительным приемным пунктом, а другой (-ие) ретрансляционным (-ными) измерительным (-ными) пунктом (-ами) с переносом спектра радиосигнала, получении за один измерительный цикл, при используемом N, избыточной информации о местоположении источника радиоизлучения квази-К-позиционной системой, значение К которой больше N и определяется выражением
K= p + g,
где р - количество пеленгов;
g - количество гипербол,
на основе применения комбинированного пеленгационно-гиперболического метода, и расчете координат источника радиоизлучения в центральном измерительном приемном пункте с известными координатами по пеленгам на источник радиоизлучения и гиперболе (-ам), полученной (-ным) по результатам измерения взаимных задержек принятого в ретрансляционном (-ных) измерительном (-ных) приемном (-ных) пункте (-ах) и центральном измерительном приемном пункте сигнала источника радиоизлучения, скорректированным на соответствующие поправки, получаемые при калибровке, осуществляемой один раз перед началом работы путем излучения модулированного тоном сигнала радиостанциями цифрового радиоканала всех измерительных приемных пунктов, включаемых поочередно по команде с кодом исполнения калибровки, передаваемой по цифровому радиоканалу с центрального измерительного приемного пункта, приема сигнала радиостанции в измерительном приемном пункте, взаимной ретрансляции его в паре измерительных приемных пунктов, измерения пеленга каждым измерительным приемным пунктом на другие измерительные приемные пункты и взаимных задержек, сравнения результатов измерений с известными расчетными значениями и запоминания результатов сравнения в виде поправок, который отличается тем, что в центральном измерительном приемном пункте по результатам пересечения пеленгов и гиперболы (гипербол) производят первичные оценки местоположения источника радиоизлучения, количество которых С определяется выражением
![]()
где р - количество пеленгов;
g - количество гипербол, для чего по команде с кодом исполнения местооп-рсделения, передаваемой с центрального измерительного приемного пункта на ретрансляционный (-ные) измерительный (-ные) приемный (-ные) пункт (-ы) по цифровому радиоканалу, содержащей код частоты источника радиоизлучения и класс радиосигнала для настройки измерительного приемного пункта и обеспечивающей синхронизацию работы всех измерительных приемных пунктов, принятый на центральном измерительном приемном пункте сигнал источника радиоизлучения ретранслируют на все ретрансляционные измерительные приемные пункты, где для измерения пеленга на источник радиоизлучения осуществляют в соответствии с задержкой временное совмещение принятых прямого и ретранслированного сигналов, затем принимаемый всеми ретрансляционными измерительными приемными пунктами сигнал источника радиоизлучения поочередно ретранслируют на центральный измерительный приемный пункт, где также для измерения пеленга осуществляют в соответствии с задержкой временное совмещение прямого и ретранслированного с одного из ретрансляционных измерительных приемных пунктов сигналов, по принятым каждым измерительным приемным пунктом прямому и ретранслированному сигналам после их временного совмещения измеряют пеленг на источник радиоизлучения, а по несовмещенным сигналам измеряют относительную задержку, причем в измерительном цикле Тц мсстоопределения источника радиоизлучения производят накопление сразу десяти пар выборок прямого и ретранслированного сигналов, при этом по пяти парам выборок осуществляют измерение пеленгов на источник радиоизлучения каждым измерительным приемным пунктом, а по пяти другим парам выборок - измерение относительных задержек сигнала, усредняют кластеры наиболее вероятных значений пеленгов и относительных задержек, усредненные значения пелегов и относительных задержек передают по цифровому радиоканалу с ретрансляционного (-ных) измерительного (-ных) приемного (-ных) пункта (-ов) на центральный измерительный приемный пункт, и рассчитывают координаты источника радиоизлучения с использованием статистических методов оптимизации обработки избыточной информации.
2. Способ по п. 1, который отличается тем, что при N больше или равно 3 для расчета координат источника радиоизлучения за один измерительный цикл формируют три области погрешностей месположе-ния источника радиоизлучения, из которых первую Р получают по результатам вычисления координат пеленгационно-гиперболическим методом, вторую G - по результатам вычисления координат разностно-дальномерным методом, а третью R - по результатам вычисления координат пелен-гационно-триангуляционным методом, определяют результирующий формат погрешностей s
![]()
находят центр тяжести этого формата и рассчитывают координаты центра тяжести, которые являются максимально правдоподобной оценкой местоположения источника радиоизлучения.
3. Система определения местоположения источников радиоизлучения, содержащая N пространственно разнесенных измерительных приемных пунктов, идентичных по составу, с известными координатами, причем N больше или равно 2, один из которых является центральным, а другой (-не) ретрансляционным (-ными) измерительным (-ними) приемным (-ными) пунктом (-ами), причем каждый измерительный приемный пункт включает антенну ретранслятора и приемопередатчик ретранслятора, первый выход которого подключен к входу антенны ретранслятора, а первый вход подключен к выходу антенны ретранслятора, антенну пеленгатора и радиоприемный блок, первый вход которого подключен к выходу антенны пеленгатора, а выход - к второму входу приемопередатчика ретранслятора, блок цифровой обработки, первый вход которого подключен к второму выходу приемопередатчика ретранслятора, а второй вход объединен со вторым входом приемопередатчика ретранслятора, блок измерения задержки, два входа которого подключены к двум выходам блока цифровой обработки, блок сравнения задержки, вход которого подключен к выходу блока измерения задержки, блок коррекции задержки, первый вход которого объединен с входом блока сравнения задержки, блок управления, второй выход которого подключен к второму входу радиоприемного блока и к третьему входу блока цифровой обработки, пятый выход подключен к второму входу блока коррекции задержки, а шестой вход подключен к выходу блока сравнения задержки, блок расчета координат, третий вход которого подключен к седьмому выходу блока управления, четвертый вход подключен к восьмому выходу блока управления, а выход подключен к второму входу блока управления, блок индикации, вход которого подключен к девятому выходу блока управления, которая отличается тем, что в измерительный приемный пункт введены блок временного совмещения прямого и ретранслированного радиосигналов, первый и второй входы которого объединены соответственно с первым и вторым входами блока измерения задержки, а третий и четвертый входы подключены соответственно к третьему и четвертому выходам блока управления, блок измерения пеленга, два входа которого подключены к двум выходам блока временного совмещения прямого и ретранслированного радиосигналов, блок сравнения пеленга, вход которого подключен к выходу блока измерения пеленга, а выход подключен к пятому входу блока управления, блок коррекции пеленга, первый вход которого объединен с входом блока сравнения пеленга, второй вход подключен к шестому выходу блока управления, блок усреднения пеленга, вход которого подключен к выходу блока коррекции пеленга, а выход подключен к второму входу блока расчета координат и четвертому входу блока управления, блок усреднения задержки, вход которого подключен к выходу блока коррекции задержки, а выход подключен к первому входу блока расчета координат и третьему входу блока управления, радиостанция и радиомодем, первый вход которого подключен к выходу радиостанции, второй вход подключен к первому выходу блока управления, первый выход подключен к входу радиостанции, а второй выход подключен к первому входу блока управления.
4. Система по п. 3, которая отличается тем, что при N больше или равно 3 блок расчета координат содержит два управляемых коммутатора, два неуправляемых коммутатора, распределитель данных, вычислитель координат пеленгационно-гиперболическим методом, вычислитель координат разностно-дальномерным методом, вычислитель координат пеленгационно-триангуляционным методом, соответственно три формирователя области погрешности местоположения, два формирователя результирующего формата погрешнее ги и вычислитель координат центра тяжести результирующего формата погрешности, причем выход первого управляемого коммутатора подключен к первому входу первого неуправляемого коммутатора, выход второго управляемого коммутатора подключен к первому входу второго неуправляемого коммутатора, первый выход распределителя данных подключен к второму входу первого неуправляемого коммутатора, а второй выход подключен на второй вход второго неуправляемого коммутатора, выход первого неуправляемого коммутатора подключен на первый вход вычислителя координат пеленга-ционно-гиперболическим методом и на вход вычислителя координат разностно-дальномерным методом, выход второго неуправляемого коммутатора подключен на второй вход вычислителя координат пеленгационно-гиперболическим и на вход вычислителя координат пеленгационно-триангу-ляционным методом, выходы вычислителей координат подключены к входам соответствующих формирователей области погрешности, выход формирователя области погрешности местоположения, полученного пеленгационно-гиперболическим методом, подключен на первый вход первого формирователя результирующего формата погрешности, выход формирователя области погрешности местоположения, полученного разностно-дальномерным методом, подключен н” второй вход первого формирователя результирующего формата погрешности, а выход формирователя области погрешности местоположения, полученного пеленгационно-триангуляционным методом, подключен к второму входу второго формирователя результирующего формата погрешности, первый вход которого подключен к выходу первого формирователя результирующего формата погрешности, выход второго формирователя результирующего формата погрешности подключен к входу вычислителя координат центра тяжести результирующего формата погрешности.
Текст
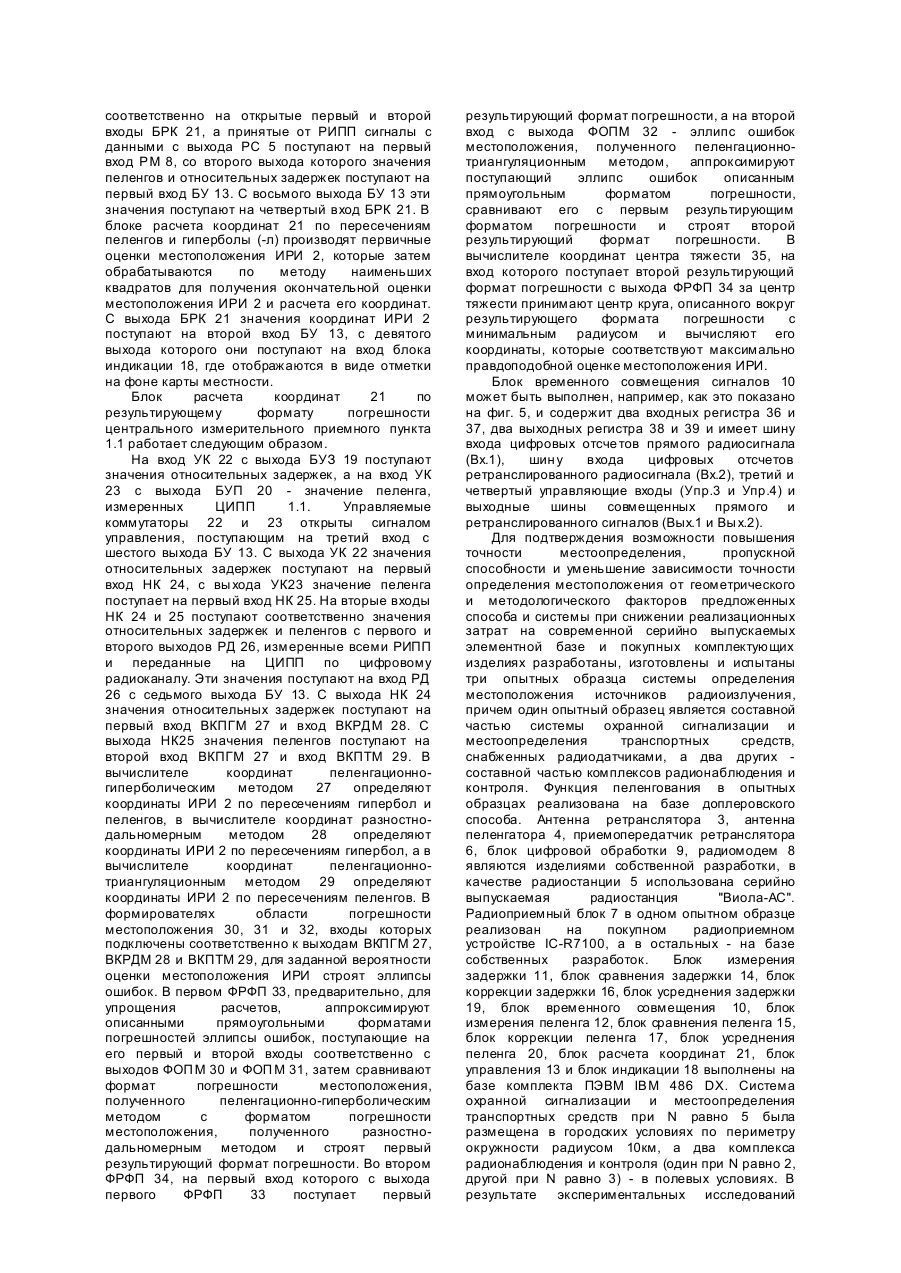
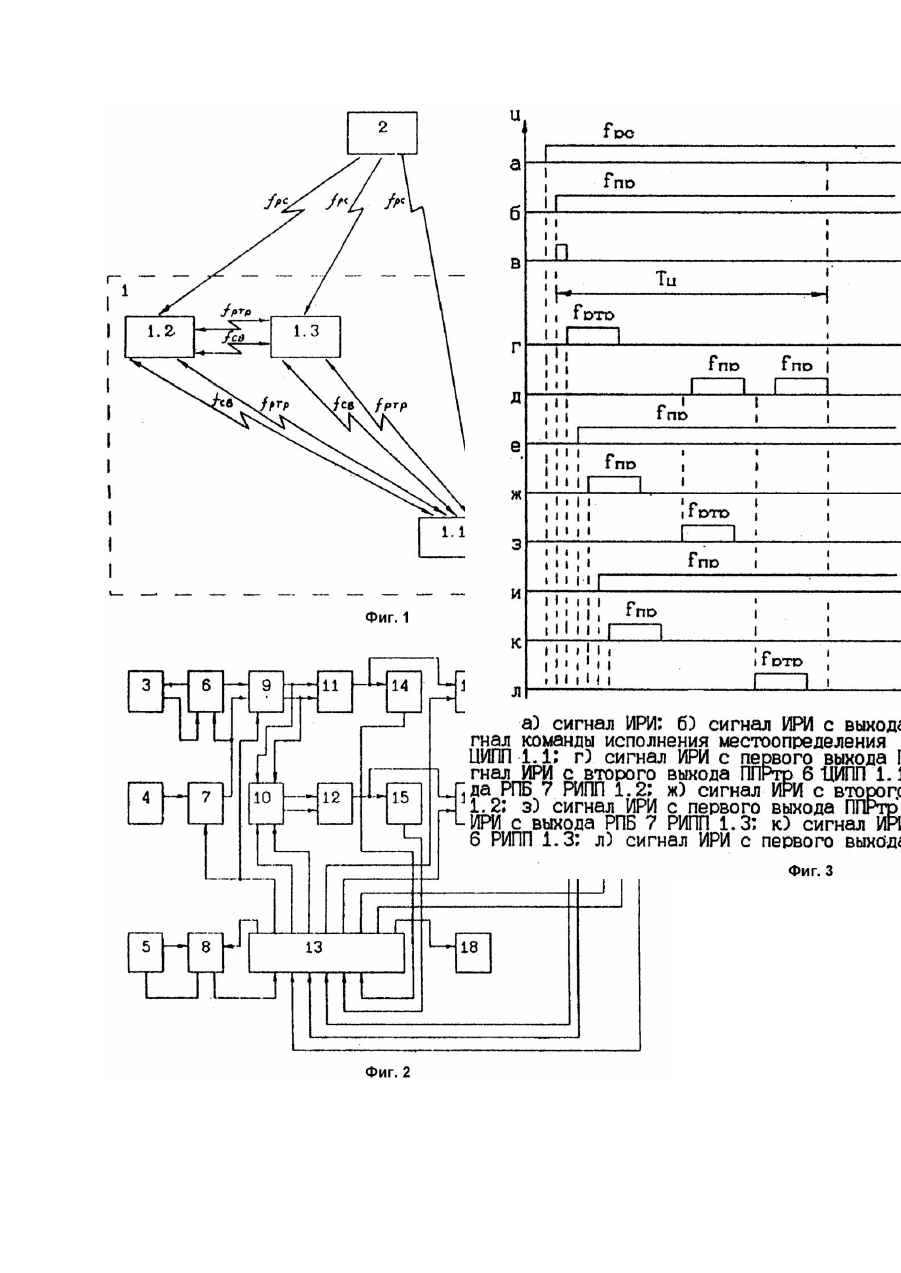
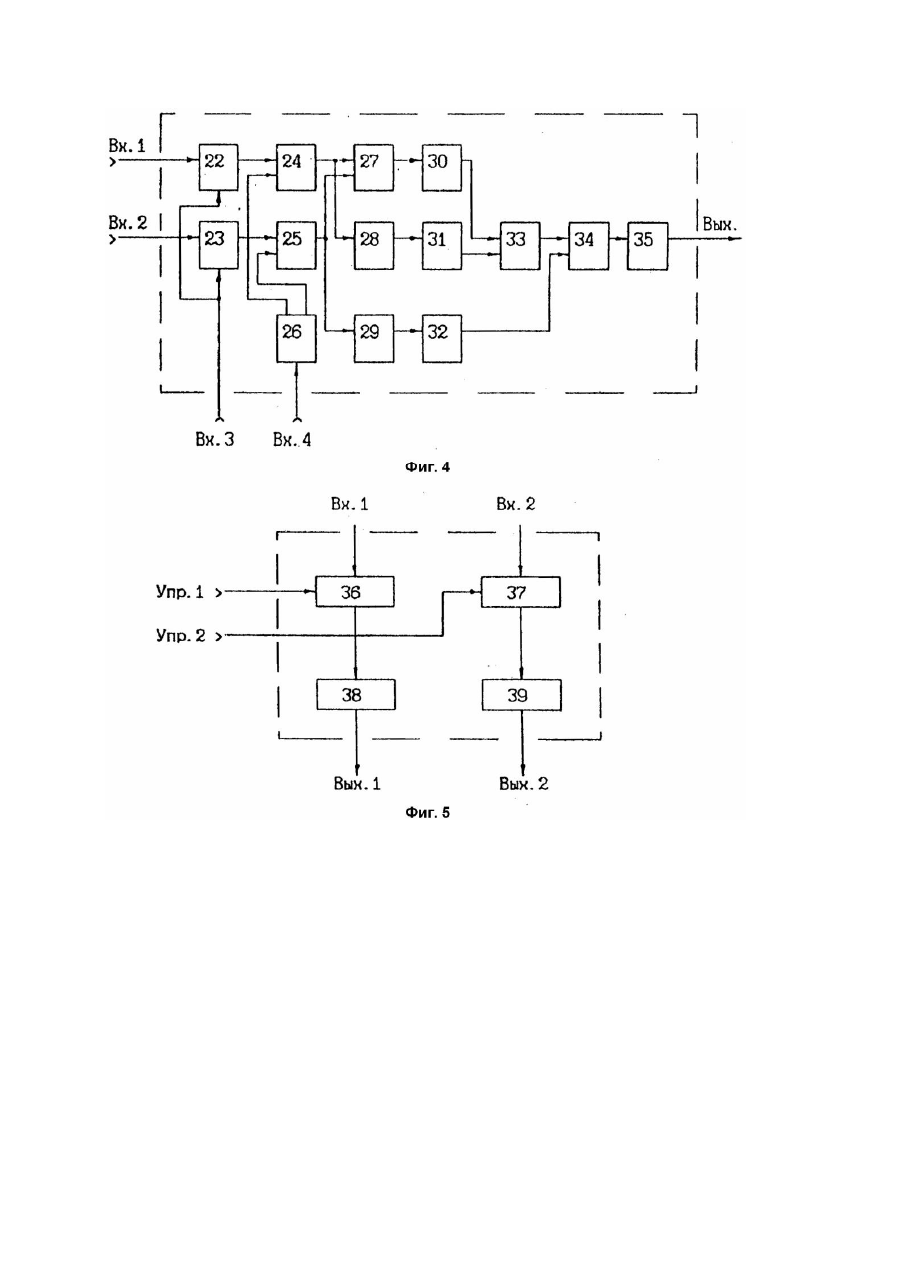
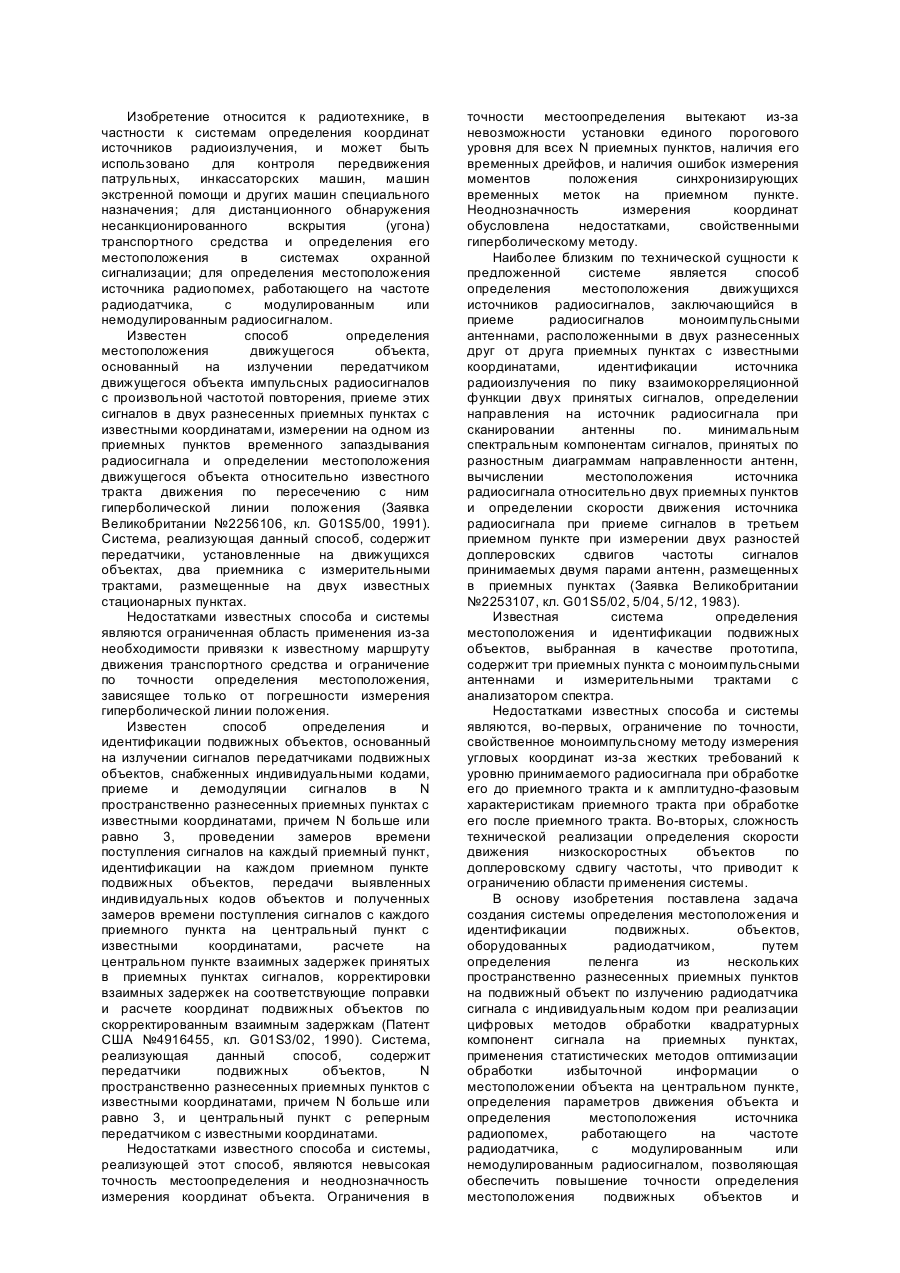
Изобретение относится к радиотехнике, в частности к системам определения координат источников радиоизлучения, и может быть использовано для определения координат объекта с источником радиоизлучения (радиодатчик, радиостанция, радиотелефон и т.п.) заинтересованными службами государственной инспекции по электросвязи, МВД, государственной безопасности, погранвойск и армии. Известен метод определения местоположения источника радиоизлучения, основанный на смешанном (комбинированном) угломерно (триангуляционно) разностнодальномерном методе, соединяющий преимущества двух методов и устраняющий неоднозначность измерений, с использованием двух пространственно разнесенных и синхронно работающих по времени приемников, коррелятора и порогового устройства. Коррелятор функционально связан с приемниками линиями передачи. Антенные системы приемников имеют узкую диаграмму направленности с малым уровнем боковых лепестков и представляют собой антенные фазированные решетки. При определении направления на источник радиоизлучения хотя бы из одного приемника становится возможным определения местоположения источника по пересечению двух линий положения - пеленга и гиперболы. Для повышения эффективности системы, реализующей этот метод, определение направления на источник осуществляется из двух приемников. Определение местоположения источника производят в два этапа. На первом этапе в процессе определения местоположения источника радиоизлучения осуществляют синхронное сканирование пространства и первоначальное определение местоположения источника пеленгационно-триангуляционным методом. Затем фазированные антенные решетки приемников ориентируют на возможное направление на источник и выполняют корреляционную обработку сигналов, поступающих на коррелятор по линиям передачи от двух приемников. При корреляционной обработке двух сигналов на выходе коррелятора в результате измерений вычисляют автокорреляционную функцию сигнала источника, а в пороговом устройстве производят обнаружение максимума автокорреляционной функции, что свидетельствует о расположении источника на гиперболической линии положения, соответствующей постоянной разности времен прихода сигнала в приемники. На втором этапе производят окончательное определение местоположения источника по пересечению одного из пеленгов и гиперболы. Минимальную погрешность определения местоположения источника радиоизлучения получают при расстояниях источника от базы не превышающих расстояние между приемниками (Mixed triangulation/trilateration technique for emitter location. Berie F.J. "IEE Proc.", 1986, F133, №7, 638 - 641). Основными недостатками известной системы, реализующей это т метод, являются низкие пропускная способность, обусловленная необходимостью последовательного проведения двух измерительных циклов - пеленгационно триангуляционного и разностно-дальномерного, и точность определения местоположения, зависящая только от точности определения гиперболической и пеленговой линий положения, на дальностях от базы до источника, превышающих расстояние между приемниками, что приводит к ограничению рабочей зоны системы. Наиболее близким по технической сущности к предложенному способу является способ определения местоположения источников радиоизлучения (передатчиков подвижных объектов), заключающийся в излучении сигналов передатчиками подвижных объектов, снабженных индивидуальными кодами, приеме и демодуляции сигналов в N пространственно разнесенных приемных пунктах с известными координатами, где N больше 3, идентификации подвижных объектов на основе демодуляции сигналов и вычислении координат объектов на центральном пункте с известными координатами по взаимным задержкам, принятых в приемных пунктах сигналов передатчиков подвижных объектов, скорректированным на поправки, получаемые при калибровке, периодически осуществляемой путем излучения на частоте передатчиков подвижных объектов из пункта с известными координатами сигнала с опознавательным кодом калибровки, приема его в этих приемных пунктах и запоминания в виде поправок результатов сравнения полученных взаимных задержек между сигналами, принятыми в приемных пунктах, с известными расчетными величинами (Патент Российской Федерации №2013785, кл. G01S13/00, 1992). Известная система определения местоположения источника радиоизлучения, реализующая это т способ и выбранная в качестве прототипа, содержит передатчики подвижных объектов, N пространственно разнесенных приемных пунктов с известными координатами, где N больше 3, и центральный пункт с известными координатами, причем каждый передатчик подвижных объектов включает последовательно соединенные генератор кода объекта, радиопередающий блок и передающую антенну, каждый приемный пункт включает последовательно соединенные приемную антенну, радиоприемный блок и демодулятор, а центральный пункт включает блок расчета координат, блок опознавания кода объекта, блок индикации, управляющий блок и три блока коррекции задержек, выходы которых подключены к соответствующим входам блока расчета координат, выход которого подключен к первому входу управляющего блока, второй вход которого подключен к выходу блока опознавания кода объекта, а первый и второй выходы подключены соответственно к входу блока индикации и к объединенным первым управляющим входам первого, второго и третьего блоков коррекции задержек, вторые управляющие входы которых подключены соответственно к третьему, четвертому и пятому выходам управляющего блока, дополнительно введенные, в каждом передатчике подвижных объектов, генератор импульсов, вы ход которого подключен к управляющему входу радиопередающего блока, в каждом приемном пункте: последовательно соединенные радиопередающий блок и радиопередающую антенну и последовательно соединенные блок опознавания кода приемного пункта и генератор одиночного импульса, выход которого подключен к управляющему входу радиопередающего блока, вход которого подключен к выходу радиоприемного блока, а вход блока опознавания кода приемного пункта подключен к выходу демодулятора, в центральном пункте: приемную антенну, три радиоприемных блока, объединенные входы которых подключены к выходу приемной антенны, три блока измерения задержки, блок сравнения задержек, три входа которого объединены с входами соответствующих трех блоков коррекции задержек и подключены к выходам соответствующи х блоков измерения задержек, а выход подключен к третьему входу управляющего блока, три демодулятора, входы которых подключены к выходам соответствующи х радиоприемных блоков, три блока опознавания кода приемного пункта, входы которых подключены к выходам соответствующи х демодуляторов, блок сравнения и усреднения кодов, три входа которого подключены к выходам соответствующи х демодуляторов, а первый и второй входы - соответственно к входу блока опознавания кода объекта и четвертому входу управляющего блока, шестой выход которого подключен к объединенным управляющим входам блока расчета координат и блока опознавания кода объекта, передатчик управления, содержащий генератор кода приемных пунктов, генератор кода калибровочного сигнала и последовательно соединенные коммутатор, радиопередающий блок и передающую антенну, причем два входа коммутатора подключены соответственно к выходам генератора кода приемных пунктов и генератора кода калибровочного сигнала, а вход генератора кода приемных пунктов и управляющие входы коммутатора и радиопередающего блока подключены к седьмому, восьмому и девятому выходам управляющего блока, соответственно пятый, шестой и седьмой входы которого подключены к выходам соответствующи х блоков опознавания кода приемных пунктов, объединенные второй вход первого и первый вход третьего блоков измерения задержки и объединенные первый вход второго и второй вход третьего блоков измерения задержки подключены к выходам соответствующи х радиоприемных блоков. Недостатками известных способа и системы являются относительно невысокая точность местоопределения, низкая системная надежность, более сильная зависимость точности местоопределения при деградации системы и изменении конфигурации размещения элементов системы в позиционном районе. Эти недостатки обусловлены следующими факторами. Ограничения в повышении точности обуславливаются технически реализуемой точностью измерения относительных задержек. При выходе из строя центрального приемного пункта система оказывается неработоспособной. Отказ в одном из ретрансляционных приемных пунктов приводит к понижению точности местоопределения системы, а при размещении приемных пунктов на местности в линию точность местоопределения резко понижается, т.к. разностно-дальномерные системы при таком размещении имеют преимущество по точности перед пеленгационными системами только при больших базах, что ограничивает возможность их применения в вариантах наземного базирования по условиям прямой радиовидимости. Кроме того, эта система малоэффективна по причине недостаточной оперативности информационного обеспечения потребителя из-за отсутствия канала передачи данных, а необходимость периодической калибровки каналов измерения относительной задержки радиосигнала сигналом передатчика с известными координатами ограничивает область применения такой системы. В основу изобретения поставлена задача создания способа определения местоположения источников радиоизлучения и системы для его осуществления путем получения избыточных первичных оценок местоположения по пересечениям пеленгов и гипербол и расчета координат источников радиоизлучения с максимально правдоподобной оценкой на базе статистических методов оптимизации обработки избыточной информации, позволяющие обеспечить повышение точности определения местоположения источников радиоизлучения, пропускной способности, надежности и эффективности системы, уменьшение зависимости точности определения местоположения от геометрического и методологического факторов при снижении реализационных затрат. Это достигается тем, что при способе определения местоположения ИРИ, заключающемся в приеме сигнала в N пространственно разнесенных измерительных приемных пунктах (ИПП), идентичных по составу, с известными координатами, причем N больше или равно 2, один из которых является центральным измерительным приемным пунктом (ЦИПП), а другой (-ие) ретрансляционным (-ными) измерительным (-ными) приемным (-ными) пунктом (-ами) (РИПП) с переносом спектра радиосигнала, получении за один измерительный цикл, при используемом N, избыточной информации о местоположении ИРИ квази-K-позиционной системой, значение K которой больше N и определяется выражением где p - количество пеленгов; g - количество гипербол, на основе применения комбинированного (пеленгационно-гиперболического метода, и расчете координат ИРИ в ЦИПП с известными координатами по пеленгам на ИРИ и гиперболе (ам), полученной (-ным) по результатам измерения взаимных задержек принятого в РИПП и ЦИПП сигнала ИРИ, скорректированным на соответствующие поправки, получаемые при калибровке, осуществляемой один раз перед началом работы путем излучения модулированного тоном сигнала радиостанциями цифрового радиоканала всех ИПП, включаемых поочередно по команде с кодом исполнения калибровки, передаваемой по цифровому радиоканалу с ЦИПП, приема сигнала радиостанции в ИПП, взаимной ретрансляции его в паре ИПП, измерения пеленга каждым ИПП на другие ИПП и взаимных задержек, сравнения результатов измерений с известными расчетными значениями и запоминания результатов сравнения в виде поправок, в ЦИПП по результатам пересечения пеленгов и гиперболы (гипербол) производят первичные оценки местоположения ИРИ, количество которых C определяется выражением где p - количество пеленгов; g - количество гипербол, для чего по команде с кодом исполнения местоопределения, передаваемой с ЦИПП на РИПП по цифровому радиоканалу, содержащей код частоты ИРИ и класс радиосигнала для настройки ИПП и обеспечивающей синхронизацию работы всех ИПП, принятый на ЦИПП сигнал ИРИ ретранслируют на все РИПП, где для измерения пеленга на ИРИ осуществляют в соответствии с задержкой временное совмещение принятых прямого и ретранслированного сигналов, затем принимаемый всеми РИПП прямой сигнал ИРИ поочередно ретранслируют на ЦИПП, где также для измерения пеленга осуществляют в соответствии с задержкой временное совмещение прямого и ретранслированного с одного из РИПП сигналов, по принятым каждым ИПП прямому и ретранслированному сигналам после их временного совмещения измеряют пеленг на ИРИ, а по несовмещенным сигналам измеряют относительную задержку, причем в измерительном цикле Tц местоопределения ИРИ производят накопление сразу десяти пар выборок прямого и ретранслированного сигналов, при этом по пяти парам выборок осуществляют измерение пеленгов на ИРИ каждым ИПП, а по пяти другим парам выборок - измерение относительных задержек сигнала, усредняют кластеры наиболее вероятных значений пеленгов и относительных задержек, усредненные значение пеленгов и относительных задержек передают по цифровому радиоканалу с РИПП на ЦИПП, и рассчитывают координаты ИРИ с использованием статистических методов оптимизации обработки избыточной информации. Кроме того, при N больше или равно 3 для расчета координат ИРИ за один измерительный цикл формируют три области погрешностей местоположения ИРИ, из которых первую P получают по результатам вычисления координат пеленгационно-гиперболическим методом, вторую G - по результатам вычисления координат разностно-дальномерным методом, а третью R по результатам вычисления координат пеленгационно-триангуляционным методом, определяют результирующий формат погрешностей s находят центр тяжести этого формата и рассчитывают координаты центра тяжести, которые являются максимально правдоподобной оценкой местоположения ИРИ. Кроме того, в системе определения местоположения источника радиоизлучения, содержащей N пространственно разнесенных измерительных приемных пунктов, идентичных по составу, с известными координатами, причем N больше или равно 2, один из которых является центральным, а другой (-ие) ретрансляционным ( ными) измерительным (-ными) приемным (-ными) пунктом (-ами), причем каждый ИПП включает антенну ретранслятора и приемопередатчик ретранслятора, первый выход которого подключен к входу антенны ретранслятора, а первый вход подключен к выходу антенны ретранслятора, антенну пеленгатора и радиоприемный блок, один вход которого подключен к выходу антенны пеленгатора, а выход подключен к второму входу приемопередатчика ретранслятора, блок цифровой обработки, первый вход которого подключен к второму выходу приемопередатчика ретранслятора, а второй вход объединен со вторым входом приемопередатчика ретранслятора, блок измерения задержки, два входа которого подключены к двум выходам блока цифровой обработки, блок сравнения задержки, вход которого подключен к выходу блока измерения задержки, блок коррекции задержки, первый вход которого объединен с входом блока сравнения задержки, блок управления, второй выход которого подключен к второму входу радиоприемного блока и к третьему входу блока цифровой обработки, пятый выход подключен к второму входу блока коррекции задержки, а шестой вход подключен к выходу блока сравнения задержки, блок расчета координат, третий вход которого подключен к седьмому вы ходу блока управления, четвертый вход подключен к восьмому вы ходу блока управления, а выход подключен к второму входу блока управления, блок индикации, вход которого подключен к девятому выходу блока управления, в ИПП введены блок временного совмещения прямого и ретранслированного радиосигналов, первый и второй входы которого объединены соответственно с первым и вторым входами блока измерения задержки, а третий и четвертый входы подключены соответственно к третьему и четвертому вы ходам блока управления, блок измерения пеленга, два входа которого подключены к двум выходам блока временного совмещения прямого и ретранслированного радиосигналов, блок сравнения пеленга, вход которого подключен к выходу блока измерения пеленга, а выход подключен к пятому входу блока управления, блок коррекции пеленга, первый вход которого объединен с входом блока сравнения пеленга, а второй вход подключен к шестому выходу блока управления, блок усреднения пеленга, вход которого подключен к выходу блока коррекции пеленга, а выход подключен к второму входу блока расчета координат и четвертому входу блока управления, блок усреднения задержки, вход которого подключен к выходу блока коррекции задержки, а выход подключен к первому входу блока расчета координат и третьему входу блока управления, радиостанцию и радиомодем, один вход которого подключен к выходу радиостанции, другой вход подключен к первому выходу блока управления, один выход подключен к входу радиостанции, а другой выход подключен к первому входу блока управления. Кроме того, при N больше или равно 3 блок расчета координат содержит два управляемых коммутатора, два неуправляемых коммутатора, распределитель данных, вычислитель координат пеленгационно-гиперболическим методом, вычислитель координат разностно-дальномерным методом, вычислитель координат пеленгационно триангуляционным методом, соответственно три формирователя области погрешности местоположения, два формирователя результирующего формата погрешности и вычислитель координат центра тяжести результирующего формата погрешности, причем выход первого управляемого коммутатора подключен к первому входу первого неуправляемого коммутатора, выход второго управляемого коммутатора подключен к первому входу второго неуправляемого коммутатора, первый выход распределителя данных подключен к второму входу первого неуправляемого коммутатора, а второй выход подключен на второй вход второго неуправляемого коммутатора, выход первого неуправляемого коммутатора подключен на первый вход вычислителя координат пеленгационногиперболическим методом и на вход вычислителя координат разностно-дальномерным методом, выход второго неуправляемого коммутатора подключен на второй вход вычислителя координат пеленгационно-гиперболическим и на вход вычислителя координат пеленгационнотриангуляционным методом, выходы вычислителей координат подключены к входам соответствующи х формирователей области погрешности местоположения, выход формирователя области погрешности местоположения, полученного пеленгационногиперболическим методом, подключен на первый вход первого формирователя результирующего формата погрешности, выход формирователя области погрешности местоположения, полученного разностно-дальномерным методом, подключен на второй вход первого формирователя результирующе го формата погрешности, а выход формирователя области погрешности местоположения, полученного пеленгационно-триангуляционным методом, подключен к второму входу второго формирователя результирующе го формата погрешности, первый вход которого подключен к выходу первого формирователя результирующего формата погрешности, выход второго формирователя результирующе го формата погрешности подключен к входу вычислителя координат центра тяжести результирующего формата погрешности. В предложенных способе и системе определения местоположения источника радиоизлучения использована совокупность идей, объединенных единым изобретательским замыслом. К ним относятся следующие: получение избыточной информации о местоположении источника радиоизлучения за один измерительный цикл без увеличения реализационных затрат и понижения пропускной способности системы. Это дает возможность для повышения достоверности оценки местоположения объекта оптимизировать процесс обработки информации на базе статистических методов, основанных на минимизации среднего риска и использовании отношения максимального правдоподобия; применение в соответствии с задержкой временного совмещения прямого и ретранслированного радиосигналов при реализации процесса пеленгования. Это дает возможность сокращения аппаратного состава измерительного приемного пункта за счет использования одноканального приемного тракта и осуществления комбинированного пеленгационногиперболического метода определения местоположения объекта практически на аппаратных средствах разностно-дальномерного метода; накопление за один измерительный цикл местоопределения сразу десяти пар выборок прямого и ретранслированного сигналов для каждой пары измерительных приемных пунктов, получение по ним пяти значений пеленга на источник радиоизлучения и пяти значений относительной задержки радиосигналов и усреднение наиболее вероятных кластеров измеренных значений пеленга и относительной задержки. Это дает возможность применения статистической обработки результатов измерений для уменьшения влияния помех, переотражений, замираний радиосигнала и других мешающих факторов с целью повышения достоверности определения местоположения объекта; применение для калибровки измерительных трактов пеленга и относительной задержки радиостанции из состава измерительного приемного пункта, что не требует введения в систему дополнительных те хнических средств; формирование за один измерительный цикл трех областей погрешности и построение результирующего формата погрешности местоположения объекта. Это обеспечивает возможность повышения точности определения координат объекта без понижения пропускной способности системы; соединение преимуществ разностнодальномерного и пеленгационнотриангуляционного методов определения местоположения объекта и компенсирование их недостатков (неоднозначность измерений, наличие нерабочих зон разностно-дальномерного метода и более сильную зависимость точности местоопределения от геометрического фактора пеленгационно-триангуляционного метода). Это уменьшает зависимость точности определения местоположения от геометрического и методологического факторов и дает универсальность применения данного способа и системы определения местоположения объекта как по вариантам целевого назначения, так и вариантам позиционного размещения системы на местности, а также минимизацию количества структурных единиц в системе без ухудшения точностных характеристик ее. Введение в структурный элемент системы новых блоков, связанных между собой и другими блоками элемента системы указанным образом, обеспечивает правило измерения пеленгов на источник радиоизлучения и относительных задержек радиосигналов и на основании их получение первичных оценок местоположения объекта, по которым производится определение координат объекта с более высокой и менее зависимой от геометрического и методологического факторов точностью при снижении реализационных затрат. Сопоставительный анализ заявляемого решения показывает, что предложенный способ отличается от известного наличием новых действий над сигналами: временное совмещение в соответствии с задержкой прямого и ретранслированного радиосигналов, накопление за один измерительный цикл десяти пар выборок прямого и ретранслированного сигналов и измерение по ним сразу двух параметров (пеленгов и относительных задержек), несущи х информацию о местоположении объекта, усреднение наиболее вероятных кластеров измеренных параметров, использование сигнала радиостанции для проведения однократной калибровки системы, развернутой в позиционном районе. Сопоставительный анализ с прототипом, также показывает, что предложенная система отличается наличием новых блоков в измерительном приемном пункте (блок усреднения задержки, блок временного совмещения радиосигналов, блок измерения пеленга, блок сравнения пеленга, блок коррекции пеленга, блок усреднения пеленга, радиостанция, радиомодем) и новыми связями между введенными блоками и остальными блоками измерительного приемного пункта, обеспечивающими реализацию нового способа определения местоположения источника радиоизлучения. В связи с этим предложенные способ и система соответствуют критерию изобретения "новизна". При изучении других известных те хнических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена, что обеспечивает соответствие критерию "изобретательский уровень". Повышение точности системы определения местоположения источника радиоизлучения, при ограниченной возможности повышения точности измерения параметров радиосигнала, несущи х информацию о местоположении объекта, может быть достигнуто при получении и оптимизации обработки информационной избыточности о местоположении объекта за счет введения в систему стр уктурной и временной избыточности, что в свою очередь влечет с одной стороны увеличение реализационных затрат, а с др угой стороны - понижение пропускной способности системы. В заявляемом решении получение избыточной информации осуществляется за счет введения в систему методологической избыточности, обеспечивающей реализацию как бы дополнительной структурной избыточности многопозиционной системы определения местоположения объекта благодаря применению комбинированного пеленгационногиперболического метода. Например, трехпозиционная разностно-дальномерная система определения местоположения объекта (N равно 3) дает одну оценку местоположения объекта по пересечению двух линий положения (гипербол), не принимая во внимание ложную зеркально расположенную точку. Эта же система с комбинированным пеленгационногиперболическим методом согласно (2) дает десять первичных оценок местоположения объекта по пересечениям трех пеленгов на источник радиоизлучения и двух гипербол, т.е. трансформируется в квази-пятипозиционную пеленгационную систему (K равно 5). Минимальной конфигурацией, реализующей заявляемый способ определения местоположения источника радиоизлучения, является система, состоящая из двух измерительных приемных пунктов (N равно 2). Такая двухпозиционная система дает три первичных оценок местоположения по пересечениям двух пеленгов и одной гиперболы, т.е. трансформируется в квазитрехпозиционную систему (K равно 3). Метод повышения точности определения координат объекта путем наложения и взаимного проектирования форматов погрешностей в виде выпуклых множеств и формировании результирующего формата, центр тяжести которого соответствует координатам местоположения объекта с максимально правдоподобной оценкой, используется как правило при пространственной и (или) временной обработке информации, что требует наличия нескольких источников информации (комплекса систем) и (или) организации процесса накопления информации о местоположении объекта. В заявляемом решении одна система при N больше или равно 3 имеет три источника, дающих информацию о местоположении объекта за один измерительный цикл местоопределения, а именно: источник информации по результатам вычисления координат объекта пеленгационногиперболическим методом, источник информации по результатам вычисления координат объекта разностно-дальномерным методом и источник информации по результатам вычисления координат объекта пеленгационнотриангуляционным методом. На фиг.1 приведена структурная схема системы, осуществляющей способ определения местоположения источника радиоизлучения; на фиг.2 стр уктурная электрическая схема измерительного приемного пункта; на фиг.3 временные диаграммы сигналов, поясняющие работу системы при N равно 3 в режиме измерения координат; на фиг.4 - структурная электрическая схема устройства расчета координат; на фиг.5 - структурная электрическая схема устройства временного совмещения прямого и ретранслированного радиосигналов. Система определения местоположения 1 источника радиоизлучения (ИРИ) 2 (фиг.1) содержит N измерительных приемных пунктов 1.i (i = 1, 2, ..., N), идентичных по составу, причем N больше или равно 2, один из которых является центральным измерительным приемным пунктом 1.i, а другой (-ие) ретрансляционным (-ными) измерительным (-ными) пунктом (-ами) 1.2, 1.3, ..., 1.N - 1. Каждый измерительный приемный пункт 1.i (фиг.2) содержит антенну ретранслятора (АРтр) 3, антенну пеленгатора (АП) 4, радиостанцию (PC) 5, приемопередатчик ретранслятора (ППРтр) 6, радиоприемный блок (РПБ) 7, радиомодем (РМ) 8, блок цифровой обработки (БЦО) 9, блок временного совмещения сигналов (БВСС) 10, блок измерения задержки (ВИЗ) 11, блок измерения пеленга (БИП) 12, блок управления (БУ) 13, блок сравнения задержки (БСЗ) 14, блок сравнения пеленга (БСП) 15, блок коррекции задержки (БКЗ) 16, блок коррекции пеленга (БКП) 17, блок индикации (БИ) 18, блок усреднения задержки (БУЗ) 19, блок усреднения пеленга (БУП) 20 и блок расчета координат (БРК) 21. Кроме того, при N больше или равно 3 блок расчета координат 21 (фиг.4) содержит два управляемых коммутатора (УК) 22 и 23, два неуправляемых коммутатора (НК) 24 и 25, распределитель данных (РД) 26, вычислитель координат пеленгационно-гиперболическим методом (ВКПГМ) 27, вычислитель координат разностно-дальномерным методом (ВКРДМ) 28, вычислитель координат пеленгационнотриангуляционным методом (ВКПТМ) 29, соответственно три формирователя области погрешности местоположения (ФОПМ) 30, 31 и 32, два формирователи результирующего формата погрешности (ФРФП) 33 и 34 и вычислитель координат центра тяжести (ВКЦТ) 35 результирующего формата погрешности. Система, реализующая способ определения местоположения источника радиоизлучения, работает следующим образом. В режиме определения местоположения обнаруженного ЦИПП 1.1 источника радиоизлучения 2 в ЦИПП 1.1 формируют команду, обеспечивающую синхронизацию работы всех ИПП, по которой в ЦИПП 1.1 на второй вход РМ 8 с первого выхода БУ 13 поступает код частоты fрс и класса радиосигнала ИРИ 2, с первого выхода РМ 8 этот код поступает на вход PC 5 для передачи его на частоте fсв по цифровому радиоканалу на все РИПП. На РИПП 1.2, 1.3, ..., 1.N - 1, с вы хода PC 5, принятый на частоте fсв , код радиосигнала ИРИ 2 поступает на первый вход РМ 8, со второго вы хода которого он поступает на первый вход БУ 13 и затем со второго выхода его на второй вход РПБ 7 и третий вход БЦО 9 для настройки РПБ 7 на частоту fрс сигнала ИРИ 2 и включения БЦО 9 в режим местоопределения. Принимаемый АП 4 каждого ИПП сигнал ИРИ 2 на частоте fрс поступает в РПБ 7 и далее с выхода РПБ 7 на промежуточной частоте fпр - на второй вход БЦО 9 и второй вход ППРтр 6, причем первоначально приемопередатчик ретранслятора 6 ЦИИПП 1.1 находится в режиме передачи, а ППРтр 6 всех РИПП находятся в режиме приема. С первого выхода ППРтр 6 центрального измерительного приемного пункта 1.1 сигнал ИРИ 2 на частоте fртр подают на вход АРтр 3 и излучают его на все РИПП. После этого ППРтр 6 центрального измерительного приемного пункта переходит в режим приема, а ППРтр всех РИПП - в режим передачи. Каждый РИПП аналогичным образом поочередно ретранслирует на частоте fртр принимаемый сигнал ИРИ 2 на ЦИПП 1.1. С выхода АРтр 3 принятый каждым ИПП сигнал ИРИ 2 на частоте fртр поступает на первый вход ППРтр 6, а со второго выхода ППРтр 6 на частоте fпр - на первый вход БЦО 9. В блоке цифровой обработки 9 каждого ИПП прямой и ретранслированный сигналы оцифровывают и формируют по ним девять пар выборок квадратурных ци фровых отсчетов, которые поступают на первый и второй входы БВСС 10 и БИЗ 11. В блоке временного совмещения сигналов 10 для совмещения прямого и ретранслированного радиосигналов по сигналу управления, поступающему на его третий вход с третьего вы хода БУ 13. считывают на первый вход БИП 12 пять выборок прямого сигнала Sn(j) (где j = 1 ... M - количество цифровых отсчетов в выборке), начиная с m + 1 отсчета по M (где m - количество цифровых отсчето в, соответствующи х запаздыванию ретранслированного сигнала на время расчетного значения задержки tрз взаимодействующей пары ИПП), т, е. Sn (m + 1 ... M), по сигналу управления, поступающему на его четвертый вход с четвертого выхода БУ 13, считывают на второй вход БИП 12 пять выборок ретранслированного сигнала Sp(j) начиная с первого отсчета по M - m, т.е. Sp(1 ... M m). В блоке измерения задержки 11 по другим пяти парам выборок осуществляют свертки двух принятых радиосигналов (комплексное перемножение квадратурных цифровы х отсчетов) и вычисляют пять значений относительной задержки радиосигналов по их взаимно корреляционным функциям. С выхода БИЗ 11 значения относительной задержки поступают на вход БСЗ 14 и на первый вход БКЗ 16. Блок сравнения задержки 14 работает только в режиме калибровки и вырабатывает значение поправки при сопоставлении измеренного значения относительной задержки сигнала PC 5 с ее расчетным значением соответствующей пары ИПП, которая поступает с выхода блока на шестой вход БУ 13 для хранения. В блоке коррекции задержки 16, измеренные значения относительной задержки сигнала ИРИ 2 корректируются на поправку, поступающую с пятого выхода БУ 13 на второй вход БКЗ 16. С вы хода БКЗ 16 скорректированные пять значений относительной задержки поступают на вход БУЗ 19, где производят усреднение кластера наиболее вероятных значений задержек, который формируется при сравнении среднеквадратических ошибок sDt измеренных значений относительных задержек с пороговым значением, равным 3 sDtп. В блоке измерения пеленга 12 по принятым пяти парам выборок также осуществляют свертки двух принятых радиосигналов, по которым выделяют функции, несущие информацию о направлении на ИРИ 2 и определяются пять значений пеленгов. С выхода БИП 12 значения пеленгов поступают на входы БСП 15 и БКП 17, выполняющих функции, аналогичные БСЗ 14 и БКЗ 16 только со значениями пеленгов. С выхода БСП 15 значение поправки пеленга поступает на пятый вход БУ 13. В блоке коррекции пеленга 17 измеренные значения пеленга на ИРИ 2 корректируются на поправку, поступающую с шестого вы хода БУ 13 на второй вход БКП 17. С выхода БКП 17 скорректированные пять значений пеленгов поступают на вход БУП 20, где производят усреднение кластера наиболее вероятных значений пеленгов, который формируется при сравнении среднеквадратических ошибок sa измеренных значений пеленгов с пороговым значением, равным В ретрансляционных измерительных приемных пунктах усредненное значение относительной задержки радиосигналов с выхода БУЗ 19 и усредненное значение пеленга с выхода БУП 20 поступают соответственно на третий и четвертый входы БУ 13, а в БРК 21 не поступают, так как первый и второй входы его закрыты сигналом управления, поступающим на его третий вход с седьмого выхода БУ 13. С первого выхода БУ 13 данные об относительных задержках и пеленгах поступают на второй вход РМ 8 и далее с первого выхода РМ 8 - на вход PC 5 для передачи данных на ЦИПП 1.1. В центральном измерительном приемном пункте 1.1 усредненное значение относительной задержки радиосигналов с выхода БУЗ 19 и усредненное значение пеленга с выхода БУП 20 поступают соответственно на открытые первый и второй входы БРК 21, а принятые от РИПП сигналы с данными с выхода PC 5 поступают на первый вход РМ 8, со второго выхода которого значения пеленгов и относительных задержек поступают на первый вход БУ 13. С восьмого выхода БУ 13 эти значения поступают на четвертый вход БРК 21. В блоке расчета координат 21 по пересечениям пеленгов и гиперболы (-л) производят первичные оценки местоположения ИРИ 2, которые затем обрабатываются по методу наименьших квадратов для получения окончательной оценки местоположения ИРИ 2 и расчета его координат. С выхода БРК 21 значения координат ИРИ 2 поступают на второй вход БУ 13, с девятого выхода которого они поступают на вход блока индикации 18, где отображаются в виде отметки на фоне карты местности. Блок расчета координат 21 по результирующему формату погрешности центрального измерительного приемного пункта 1.1 работает следующим образом. На вход УК 22 с выхода БУЗ 19 поступают значения относительных задержек, а на вход УК 23 с выхода БУП 20 - значение пеленга, измеренных ЦИПП 1.1. Управляемые коммутаторы 22 и 23 открыты сигналом управления, поступающим на третий вход с шестого выхода БУ 13. С выхода УК 22 значения относительных задержек поступают на первый вход НК 24, с вы хода УК23 значение пеленга поступает на первый вход НК 25. На вторые входы НК 24 и 25 поступают соответственно значения относительных задержек и пеленгов с первого и второго выходов РД 26, измеренные всеми РИПП и переданные на ЦИПП по цифровому радиоканалу. Эти значения поступают на вход РД 26 с седьмого выхода БУ 13. С выхода НК 24 значения относительных задержек поступают на первый вход ВКПГМ 27 и вход ВКРДМ 28. С выхода НК25 значения пеленгов поступают на второй вход ВКПГМ 27 и вход ВКПТМ 29. В вычислителе координат пеленгационногиперболическим методом 27 определяют координаты ИРИ 2 по пересечениям гипербол и пеленгов, в вычислителе координат разностнодальномерным методом 28 определяют координаты ИРИ 2 по пересечениям гипербол, а в вычислителе координат пеленгационнотриангуляционным методом 29 определяют координаты ИРИ 2 по пересечениям пеленгов. В формирователях области погрешности местоположения 30, 31 и 32, входы которых подключены соответственно к выходам ВКПГМ 27, ВКРДМ 28 и ВКПТМ 29, для заданной вероятности оценки местоположения ИРИ строят эллипсы ошибок. В первом ФРФП 33, предварительно, для упрощения расчетов, аппроксимируют описанными прямоугольными форматами погрешностей эллипсы ошибок, поступающие на его первый и второй входы соответственно с выходов ФОП М 30 и ФОП М 31, затем сравнивают формат погрешности местоположения, полученного пеленгационно-гиперболическим методом с форматом погрешности местоположения, полученного разностнодальномерным методом и строят первый результирующий формат погрешности. Во втором ФРФП 34, на первый вход которого с выхода первого ФРФП 33 поступает первый результирующий формат погрешности, а на второй вход с выхода ФОПМ 32 - эллипс ошибок местоположения, полученного пеленгационнотриангуляционным методом, аппроксимируют поступающий эллипс ошибок описанным прямоугольным форматом погрешности, сравнивают его с первым результирующим форматом погрешности и строят второй результирующий формат погрешности. В вычислителе координат центра тяжести 35, на вход которого поступает второй результирующий формат погрешности с выхода ФРФП 34 за центр тяжести принимают центр круга, описанного вокруг результирующего формата погрешности с минимальным радиусом и вычисляют его координаты, которые соответствуют максимально правдоподобной оценке местоположения ИРИ. Блок временного совмещения сигналов 10 может быть выполнен, например, как это показано на фиг. 5, и содержит два входных регистра 36 и 37, два выходных регистра 38 и 39 и имеет шину входа цифровых отсче тов прямого радиосигнала (Вх.1), шин у входа цифровых отсчетов ретранслированного радиосигнала (Вх.2), третий и четвертый управляющие входы (Упр.3 и Упр.4) и выходные шины совмещенных прямого и ретранслированного сигналов (Вых.1 и Вы х.2). Для подтверждения возможности повышения точности местоопределения, пропускной способности и уменьшение зависимости точности определения местоположения от геометрического и методологического факторов предложенных способа и системы при снижении реализационных затрат на современной серийно выпускаемых элементной базе и покупных комплектующих изделиях разработаны, изготовлены и испытаны три опытных образца системы определения местоположения источников радиоизлучения, причем один опытный образец является составной частью системы охранной сигнализации и местоопределения транспортных средств, снабженных радиодатчиками, а два других составной частью комплексов радионаблюдения и контроля. Функция пеленгования в опытных образцах реализована на базе доплеровского способа. Антенна ретранслятора 3, антенна пеленгатора 4, приемопередатчик ретранслятора 6, блок цифровой обработки 9, радиомодем 8 являются изделиями собственной разработки, в качестве радиостанции 5 использована серийно выпускаемая радиостанция "Виола-АС". Радиоприемный блок 7 в одном опытном образце реализован на покупном радиоприемном устройстве IC-R7100, а в остальных - на базе собственных разработок. Блок измерения задержки 11, блок сравнения задержки 14, блок коррекции задержки 16, блок усреднения задержки 19, блок временного совмещения 10, блок измерения пеленга 12, блок сравнения пеленга 15, блок коррекции пеленга 17, блок усреднения пеленга 20, блок расчета координат 21, блок управления 13 и блок индикации 18 выполнены на базе комплекта ПЭВМ IBM 486 DX. Система охранной сигнализации и местоопределения транспортных средств при N равно 5 была размещена в городских условиях по периметру окружности радиусом 10км, а два комплекса радионаблюдения и контроля (один при N равно 2, другой при N равно 3) - в полевых условиях. В результате экспериментальных исследований опытных образцов получены основные характеристики систем: следующие Таким образом, использование в предложенных способе и системе определения местоположения источника радиоизлучения следующих отличительных признаков: увеличение количества первичных оценок местоположения без увеличения структурной избыточности за счет применения комбинированного пеленгационногиперболического метода: временное совмещение с уче том задержки прямого и ретранслированного радиосигналов: накопление сразу десяти пар выборок прямого и ретранслированного сигналов за один измерительный цикл: измерение по одним пяти парам выборок прямого и ретранслированного сигналов пяти пеленгов, а по другим пяти парам пяти относительных задержек между ними за один измерительный цикл, усреднение наиболее вероятных кластеров значений пеленгов и относительных задержек: применение статистических методов оптимизации обработки избыточной информации, позволяет по сравнению с прототипом, а также известными техническими решениями в данной области повысить точность определения местоположения источников радиоизлучения, пропускную способность, надежность и эффективность системы, уменьшить зависимость точности определения местоположения от геометрического и методологического факторов, а также существенно сократить затраты на техническую реализацию системы. Принципиальное отличие предложенной системы заключается в ее универсальности применения по целевому назначению, многофункциональности, системной гибкости и надежности: система может использоваться для определения местоположения подвижных и неподвижных объектов как с встроенными источниками радиоизлучения (радиодатчиками), так и штатными (радиостанциями служебной связи, радиотелефонами и т.п.): система может быть коммерческой, например, охранного назначения при несанкционированном доступе к транспортным средствам и специального назначения, входя в состав комплексов радионаблюдения и контроля для решения задач заинтересованных служб государственной инспекции по электросвязи, МВД, государственной безопасности, погранвойск и армии: система имеет цифровой радиоканал, обеспечивающий оперативный обмен данными с потребителем информации: изменение целевого назначения и расширение функциональных возможностей системы обеспечивается в основном изменением и наращиванием встраиваемого программного продукта: система не критична к размерам обслуживаемых территорий и вариантам позиционного размещения ее элементов на местности; идентичность по составу измерительных приемных пунктов и наличие двух параллельных измерительных трактов относительной задержки и пеленга повышает надежность системы в целом, так как функциональное разбиение измерительных приемных пунктов на центральный и ретрансляционные осуществляется оператором при вводе начальных установок и при выходе из строя центрального пункта его роль может взять на себя любой из ретрансляционных, а выход из строя одного из измерительных трактов не приводит к отказу приемного пункта. Кроме того, идентичность по составу измерительных приемных пунктов обеспечивает высокую те хнологичность системы при ее серийном изготовлении.
ДивитисяДодаткова інформація
Автори англійськоюBaskakov Yurii Heorhiiovych, Lihinov Serhii Mykhailovych, Hudziuk Vasyl Petrovych, Lihinov Serhii Mykhailovych, Lytvynenko Valentyn Ivanovych, Maltsev Vadym Oleksandrovych
Автори російськоюБаскаков Юрий Георгиевич, Лигинов Сергей Михайлович, Гудзюк Василий Петрович, Лигинов Сергей Михайлович, Литвиненко Валентин Иванович, Мальцев Вадим Александрович
МПК / Мітки
МПК: G01S 5/12
Мітки: спосіб, радіовипромінювання, здійснення, система, джерел, місцеположення, визначення
Код посилання
<a href="https://ua.patents.su/10-21335-sposib-viznachennya-miscepolozhennya-dzherel-radioviprominyuvannya-i-sistema-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцеположення джерел радіовипромінювання і система для його здійснення</a>
Система визначення місцеположення і ідентифікації рухомих об’єктів, обладнаних радіодатчиком
Номер патенту: 20426
Опубліковано: 15.07.1997
Автори: Сирма Олексій Олексійович, Грішін Леонід Андрійович, Мальцев Вадим Олександрович, Гудзюк Василь Петрович, Лігінов Сергій Михайлович, Мєдвєдєв Сергій Леонідович, Литвиненко Валентин Іванович, Баскаков Юрій Георгійович, Муратов Олександр Олексійович
Мітки: ідентифікації, обладнаних, система, рухомих, радіодатчиком, місцеположення, визначення, об'єктів
Формула / Реферат:
Система определения местоположения и идентификации подвижных объектов, оборудованных радиодатчиком, содержащая N пространственно разнесенных постов пеленгования с известными координатами, причем N больше или равно 3, и центральный пост с известными координатами, причем каждый радиодатчик подвижных объектов включает датчик дверей, вибродатчик, выходы которых подключены к входам устройства сопряжения, устроиство управления, один вход...
Спосіб визначення електричної потужності та пристрій для його здійснення
Номер патенту: 14063
Опубліковано: 25.04.1997
Автори: Волошко Анатолій Васильович, Праховник Артур Веніамінович, Калінчик Василь Прокопович
МПК: G01R 21/06
Мітки: визначення, здійснення, пристрій, спосіб, потужності, електричної
Формула / Реферат:
1. Способ определения электрической мощности, заключающийся в том, что измеряют мгновенные значения тока и преобразуют их в код, отличающийся тем, что, с целью упрощения измерения мощности, величину напряжения в положительные полупериоды преобразуют в частоту fi, осуществляют преобразование тока в код в дискретные промежутки времени Dti = 1/f1, a мощность определяют по формулегде К - постоянный коэффициент;Т - период...
Спосіб контролю щільності твердої фази суспензій та пристрій для його здійснення
Номер патенту: 6266
Опубліковано: 29.12.1994
Автори: Потапов Віктор Миколайович, Моркун Володимир Станіславович
МПК: G01N 29/00
Мітки: контролю, здійснення, суспензій, спосіб, пристрій, фазі, щільності, твердої
Формула / Реферат:
1. Способ контроля плотности твердой фазы суспензий, заключающийся в том, что в исследуемую среду излучают ультразвуковую волну и измеряют ее амплитуду, отличающийся тем, что, с целью повышения точности, используют ультразвуковую волну Лэмба, которую генерируют на границе раздела исследуемой суспензии с заключающей ее емкостью, пропускают через исследуемую среду g-излучение и измеряют амплитуду ультразвуковой волны Лэмба и интенсивность...
Спосіб визначення коефіцієнта демпфірування і пристрій для його здійснення
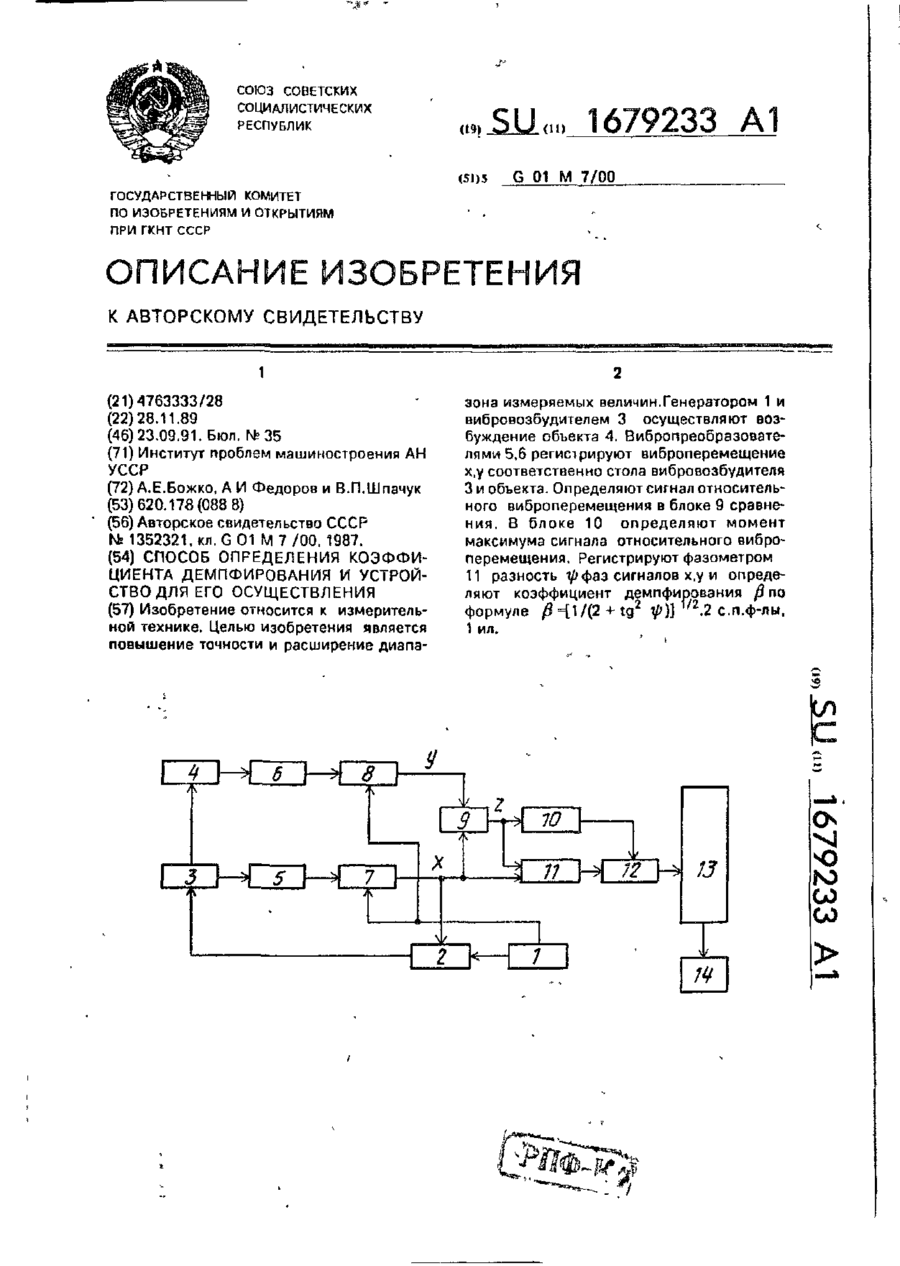
Номер патенту: 5877
Опубліковано: 29.12.1994
Автори: Федоров Олександр Іванович, Божко Олександр Євгенович, Шпачук Володимир Петрович
Мітки: пристрій, демпфірування, визначення, спосіб, здійснення, коефіцієнта
Формула / Реферат:
1. Способ определения коэффициента демпфирования объекта, заключающийся в том, что возбуждают вынужденные колебания механического объекта, закрепленного на столе вибровозбудителя в диапазоне частот прирезонансной области при постоянном уровне виброперемещений стола, регистрируют сигналы х, у, пропорциональные виброперемещениям соответственно стола вибро возбудителя и механического объекта, и определя ют коэффициент демпфирования,...
Спосіб визначення коефіцієнту демпфування та пристрій для його здійснення
Номер патенту: 14883
Опубліковано: 18.02.1997
Автор: Шпачук Володимир Петрович
Мітки: пристрій, здійснення, спосіб, коефіцієнту, визначення, демпфування
Формула / Реферат:
1. Способ определения коэффициента демпфирования, заключающийся в том, что возбуждают вынужденные колебания механического объекта, закрепленного на столе вибровозбудителя в диапазоне частот прирезонансной области при постоянном уровне виброперемещений стола, регистрируют сигналы пропорциональные виброперемещениям соответственйо стола вибровозбудителя и механического объекта, и определяют коэффициент демпфирования, отличающийся тем, что...
Попередній патент: Дільничий стрічковий конвейєр
Наступний патент: Спосіб поліпшення якості питної води і пристрій для його здійснення
Випадковий патент: Кожухотрубний теплообмінник