Комбінований електрокерований привід
Номер патенту: 27945
Опубліковано: 26.11.2007
Автори: Кирилюк Ігор Олегович, Корогодський Володимир Анатолійович, Ломов Сергій Георгійович
Формула / Реферат
1. Комбінований електрокерований привід, у якому електрична енергія перетворюється в лінійне переміщення рухливої частини приводу, що містить щонайменше дві електричні котушки і щонайменше один якір, який має феромагнітну частину і електропровідну неферомагнітну частину, і взаємодіючий з електричними котушками при підключенні останніх до джерела електричної енергії, щонайменше один з яких є імпульсним джерелом електричної енергії, при цьому зовнішня робоча поверхня феромагнітної частини розміщена в області впливу однієї котушки, а зовнішня робоча поверхня неферомагнітної частини розміщена в області впливу іншої котушки, і щонайменше одна з електричних котушок підключена до імпульсного джерела електричної енергії, який відрізняється тим, що робочі поверхні феромагнітної і неферомагнітної електропровідної частини якоря розміщені одна уздовж іншої.
2. Привід за п. 1, який відрізняється тим, що робочі поверхні феромагнітної і неферомагнітної електропровідної частини якоря виконані таким чином, що різниця кутів між ними та віссю переміщення рухливої частини приводу складає не більше ніж 45°.
3. Привід за пп. 1, 2, який відрізняється тим, що робочі поверхні феромагнітної і електропровідної неферомагнітної частини якоря є плоскими і розташовані паралельно одна одній, при цьому зазначені поверхні якоря орієнтовані поперек осі переміщення рухливої частини приводу.
4. Привід за п. 3, який відрізняється тим, що феромагнітна і електропровідна неферомагнітна частини якоря виконані у вигляді диска.
5. Привід за пп. 1, 2, який відрізняється тим, що робочі поверхні феромагнітної і електропровідної неферомагнітної частини якоря є співвісними одна одній та виконані циліндричними, при цьому зазначені поверхні якоря орієнтовані уздовж осі переміщення рухливої частини приводу.
6. Привід за п. 5, який відрізняється тим, що феромагнітна і електропровідна неферомагнітна частини якоря виконані у вигляді гільзи.
7. Привід за пп. 1, 2, який відрізняється тим, що робочі поверхні феромагнітної і електропровідної неферомагнітної частини якоря є співвісними одна одній та виконані конусними, при цьому осі зазначених поверхонь якоря орієнтовані уздовж осі переміщення рухливої частини приводу.
8. Привід за п. 7, який відрізняється тим, що якір виконаний із внутрішньою порожниною.
9. Привід за пп. 1-8, який відрізняється тим, що рухливою частиною приводу є якір.
10. Привід за пп. 1-9, який відрізняється тим, що електричні котушки виконані з можливістю одночасного підключення до імпульсних джерел електричної енергії.
11. Привід за пп. 1-9, який відрізняється тим, що електричні котушки виконані з можливістю незалежного підключення до імпульсних джерел електричної енергії, при цьому електрична котушка, в області впливу якої розміщена електропровідна неферомагнітна частина якоря, виконана з можливістю підключення до імпульсного джерела електричної енергії через заданий інтервал часу після підключення електричної котушки, в області впливу якої розміщена феромагнітна частина якоря.
12. Привід за пп. 1-11, який відрізняється тим, що імпульсним джерелом електричної енергії для котушки, в області впливу якої розміщена феромагнітна електропровідна частина якоря, є джерело постійного струму, що підключається до обмотки котушки за допомогою транзистора.
13. Привід за пп. 1-11, який відрізняється тим, що імпульсним джерелом електричної енергії для електричних котушок є принаймні один конденсатор електролітичного типу, що підключається до обмоток котушок за допомогою транзистора.
14. Привід за п. 13, який відрізняється тим, що транзистор виконаний з можливістю забезпечення часткового розряду конденсатора в аперіодичному режимі розряду.
Текст
1. Комбінований електрокерований привід, у якому електрична енергія перетворюється в лінійне переміщення рухли вої частини приводу, що містить щонайменше дві електричні котушки і щонайменше один якір, який має феромагнітну частину і електропровідну неферомагнітну частину, і взаємодіючий з електричними котушками при підключенні останніх до джерела електричної енергії, щонайменше один з яких є імпульсним джерелом електричної енергії, при цьому зовнішня робоча поверхня феромагнітної частини розміщена в області впливу однієї котушки, а зовнішня робоча поверхня неферомагнітної частини розміщена в області впливу іншої котушки, і щонайменше одна з електричних котушок підключена до імпульсного джерела електричної енергії, який відрізняється тим, що робочі поверхні феромагнітної і неферомагнітної електропровідної частини якоря розміщені одна уздовж іншої. 2. Привід за п. 1, який відрізняється тим, що робочі поверхні феромагнітної і неферомагнітної електропровідної частини якоря виконані таким чином, що різниця кутів між ними та віссю переміщення рухливої частини приводу складає не більше ніж 45°. 3. Привід за пп. 1, 2, який відрізняється тим, що робочі поверхні феромагнітної і електропровідної неферомагнітної частини якоря є плоскими і розташовані паралельно одна одній, при цьому зазначені поверхні якоря орієнтовані поперек осі переміщення рухливої частини приводу. 4. Привід за п. 3, який відрізняється тим, що феромагнітна і електропровідна неферомагнітна частини якоря виконані у ви гляді диска. 2 (19) 1 3 27945 часткового розряду конденсатора в аперіодичному режимі Корисна модель відноситься до області електротехніки, зокрема до електрокерованих приводів. Існує ряд пристроїв, для функціонування яких потрібні електрокеровані приводи, що забезпечують задані переміщення протягом дуже коротких і точно визначених проміжків часу. Так, наприклад, у пристроях відбору проб рідин або газів у випадку вивчення процесів, що швидко змінюються, потрібно зробити відбір зразка в точно визначений проміжок часу, у системах дозування рідин або газів швидкість і точність роботи приводу є визначальною для досягнення точності дозування. У цих пристроях звичайно застосовуються електромагнітні, електродинамічні і комбіновані приводи різної конструкції. Принцип дії електромагнітного привода заснований на прагненні магнітного поля, що створюється струмом, який протікає через обмотку електромагніта, до мінімального об'єму (закон про максимум енергії в об'ємі електромагніта). Внаслідок цього рухливий феромагнітний якір електромагніта прагне зайняти таке положення, коли середня силова лінія магнітного поля в магнітопроводі електромагніта буде мати мінімально можливу для даної конструкції довжину. Принциповими недоліками електромагнітного привода, що обмежують його швидкодію, є висока індуктивність електромагніта, тривалий час зміни магнітного поля в магнітопроводі, ефект насичення магнітопроводу та велике зниження величини початкової тягової сили внаслідок впливу повітряного початкового зазору. Таким чином, тягова сила електромагніта повільно наростає при включенні та повільно знижується при вимиканні. Для збільшення тягової сили електромагніта, через ефект насичення магнітопроводу, необхідно пропорційно збільшувати масу рухливої частини магнітопроводу, тобто питома (віднесена до рухливої маси) величина сили тяги електромагніта обмежена. При цьому для компенсації зниження величини початкової тягової сили потрібно додатково збільшувати розміри електромагніта, у тому числі і його рухли вої частини. Отже, існує межа швидкодії пристроїв з даним приводом, що обмежує область його застосування. Принцип дії електродинамічного привода заснований на використанні ефекту силової взаємодії провідника (контуру) зі стр умом і зовнішнього магнітного поля (описується законом Ампера). При пропущенні через електричну котушку імпульсу стр уму виникає магнітний потік, що взаємодіє з електропровідним матеріалом якоря і наводить в ньому електрорушійну силу. Під дією електрорушійної сили в якорі виникає вихровий електричний струм. Стр ум якоря взаємодіє з магнітним полем котушки, створюючи тим самим імпульс механічної сили відштовхування якоря від котушки. До недоліків електродинамічних приводів відносяться 4 розряду. короткочасність дії сили, великі струми керування, відносно низький ККД. Для забезпечення тривалої дії сили необхідно подавати серію імпульсів струму, при цьому для компенсації впливу повітряного кінцевого зазору потрібно використовува ти великі струми. Великі струми керування і низький ККД викликають нагрівання привода. Відвід значної кількості тепла від електродинамічного привода є складною технічною проблемою. Потужність, а значить швидкодія, що досягається, і частота спрацьовування існуючих електродинамічних приводів обмежені їх припустимим нагріванням і можливостями охолодження. Відомі конструкції, що поєднують кілька електромагнітних або електродинамічних приводів, а також конструкції, що являють собою приводи, які мають електромагнітну та електродинамічну частини. У цих конструкціях, за рахунок сполучення властивостей декількох різнотипних приводів, прагнуть збільшити тягову силу, швидкість руху якоря або швидкодію, підвищити ККД використання електричної енергії і знизити небажане нагрівання привода, забезпечити додаткові можливості (наприклад, швидке зниження тягової сили при вимиканні привода, швидкий розгін якоря, характерний для електродинамічного привода та утримання якоря з великою силою наприкінці його руху, властиве електромагнітному приводу), недосяжні при використанні тільки одного електромагнітного чи електродинамічного приводів. З патенту Німеччини №2306007 відомий електромагнітний привід клапанної форсунки для впорскування палива в камеру згоряння двигуна внутрішнього згоряння, котушка якого має три обмотки, керування кожною з яких здійснюється за допомогою трьох роздільних електричних ланцюгів. При цьому перший електричний ланцюг служить для швидкого підняття клапана форсунки, другий електричний ланцюг призначений для утримання клапана форсунки у відкритому стані, а третій електричний ланцюг служить для створення зустрічного магнітного поля, що сприяє зникненню залишкового магнітного поля, з метою прискорення процесу закриття клапана форсунки. Недоліки відомого з вказаного патенту привода клапана форсунки викликані описаними вище властивостями електромагніта і складаються в повільному відкритті клапана, низькій точності коротких тимчасових інтервалів, неможливості швидкого здійснення повторного руху клапана і винятково трудомісткому виготовленню системи з трьома електричними ланцюгами, що керують трьома обмотками котушки. З патенту РФ № 2096610 відомий комбінований електрокерований привід ударного механізму, у якому електрична енергія перетворюється в лінійне переміщення рухливої частини привода, що включає електричну котушку та якір-ударник, який має феромагнітну частину та 5 27945 6 електропровідну неферомагнітну частину, і електрична енергія перетворюється в лінійне взаємодіючий із пружиною і з електричною переміщення рухливої частини привода, що котушкою при підключенні її до джерела включає щонайменше дві електричні котушки і електричної енергії, при цьому привід має щонайменше один якір, який має феромагнітну електромагнітну та електродинамічну частини. частину і неферомагнітну електропровідну Виконання якоря-ударника з двох частин частину, і взаємодіючий з електричними електропровідної неферомагнітної і котушками при підключенні останніх до джерела феромагнітної, дозволяє при проходженні електричної енергії, щонайменше один із яких є імпульсного струму в початковий момент імпульсним джерелом електричної енергії, при одержати найбільше значення імпульсу сили, що цьому зовнішня робоча поверхня феромагнітної виникає при взаємодії вихрових стр умів, частини розміщена в області впливу однієї наведених у електропровідній неферомагнітній котушки, а зовнішня робоча поверхня частині якоря-ударника і магнітного полю котушки неферомагнітної частини розміщена в області (електродинамічна сила). Одночасно діє й впливу іншої котушки і щонайменше одна з електромагнітна сила у феромагнітній частині електричних котушок підключена до імпульсного якоря-ударника, тому що останній втягується в джерела електричної енергії, при цьому котушку в результаті прагнення магнітного поля, електрична котушка, розміщена у феромагнітному що створюється струмом, який протікає крізь корпусі, і феромагнітна частина якоря утворюють обмотку електромагніта, до мінімального об'єму. електромагнітну частину привода, а інша Величина електромагнітної сили значно менше електрична котушка і електропровідна максимальної величини імпульсу неферомагнітна частина якоря утворюють електродинамічної сили, але тому що електродинамічну частину привода. У відомому електромагнітна сила діє весь час руху якоряприводі застосовуються електромагнітна частина ударника і вектори електромагнітної та привода дискового типу (котушка електромагніта електродинамічної сил збігаються, така взаємодіє з плоскою феромагнітною частиною конструкція дозволяє в цілому збільшити ККД якоря, встановленою на його торцевій поверхні), і пристрою та збільшити швидкість переміщення електродинамічна частина привода гільзового якоря-ударника. Коли електропровідна типу (котушка електродинамічного привода неферомагнітна частина якоря-ударника виходить взаємодіє з бічною електропровідною поверхнею з об'єму котушки (після проходження якоремякоря). ударником половини шляху вільного ходу) Недолік описаного рішення обумовлений електродинамічна сила перестає діяти і якірзастосуванням одночасно електромагнітної ударник рухається тільки під дією електромагнітної частини привода дискового типу (із плоскою сили та сили інерції. робочою поверхнею) і електродинамічної частини Недоліки описаного рішення обумовлені привода гільзового типу (з циліндричною робочою використанням як для електромагнітної, так і для поверхнею). Таке виконання описаного пристрою електродинамічної частин привода однієї не дозволяє забезпечити ефективну спільну загальної котушки, оточеної феромагнітним роботу електромагнітної та електродинамічної магнітопроводом. Для забезпечення великої частин привода на всіх ділянках переміщення величини сили електродинамічної частини рухливої частини привода, приводить до зниження привода в котушці комбінованого привода припустимої потужності і швидкодії необхідна велика величина імпульсу стр уму. електродинамічної частини привода. Такий струм викликає відповідні вихрові струми в Недоліки описаного пристрою пояснюються магнітопроводі, що приводить до його підвищеного наступним чином. Особливістю роботи нагрівання. Велика індуктивність такого привода, електромагнітного та електродинамічного приводів що обумовлена наявністю феромагнітного дискового типу є велика величина механічної сили магнітопроводу, приводить до низьких швидкостей при малих робочих зазорах, і швидке зменшення наростання керуючого струм у і, відповідно, до сили при збільшенні робочого зазору. Так як зменшення імпульсу сили електродинамічного робочий зазор електромагнітної частини привода привода, не дозволяє здійснити швидке повторне при робочому русі якоря зменшується, а робочий спрацьовування привода. При перевищенні деякої зазор електродинамічної частини привода зростає, величини імпульсу стр уму настає е фект насичення відповідно і сила електромагнітного приводу магнітопроводу, при цьому сила електромагнітної швидко збільшується, а сила електродинамічного частини привода практично не підвищується, а привода швидко зменшується при робочому русі втрати енергії і нагрів магнітопроводу якоря. Електромагнітні та електродинамічні продовжують збільшуватися, що приводить до приводи дискового типу забезпечують порівняно різкого зниження ККД привода. Таким чином, велику величину механічної сили і максимальну потужність, досяжна швидкодія і частота швидкодію привода при невеликих переміщеннях спрацьовування комбінованого привода з якоря. Електромагнітні та електродинамічні загальною котушкою обмежені властивостями приводи гільзового типу забезпечують порівняно загального феромагнітного магнітопроводу невелику, але практично постійну величину комбінованого привода. механічної сили при великих переміщеннях якоря. Найбільш близьким аналогом технічного В результаті застосування одночасно рішення, що заявляється, є комбінований електромагнітної частини привода дискового типу електрокерований привід, описаний в та електродинамічної частини привода гільзового [авторському свідоцтві СРСР №1808095], у якому типу, у відомому з [авторського свідоцтва СРСР 7 27945 8 №1808095] пристрої при великих робочих електродинамічних приводів у пристроях, що переміщеннях якоря, на ділянці розгону працює повинні забезпечити задані переміщення протягом тільки електродинамічна частина привода. дуже коротких і точно позначених проміжків часу Електромагнітна частина привода працює тільки не дозволяє забезпечити необхідну швидкодію і на кінцевій ділянці руху якоря і при утриманні частоту спрацьовування електродинамічного клапана у відкритому стані. Швидкодія такого привода. привода обумовлена порівняно невеликою Крім того, такий режим розряду вимагає величиною механічної сили тільки застосування у якості імпульсного джерела енергії електродинамічної частини привода гільзового конденсаторів металопаперового, типу. При невеликих робочих переміщеннях якоря, металоплівкового або інших типів, призначених на ділянці розгону працюють і електродинамічна, і для роботи в імпульсних режимах з повним електромагнітна частини привода, однак розрядом запасеної в конденсаторі енергії. Такі швидкодія такого привода обмежена порівняно конденсатори мають принципові недоліки. В невеликою величиною механічної сили імпульсному режимі розряду при короткочасному електродинамічної частини привода гільзового за величиною імпульсі струму, що необхідний для типу. При цьому діаметр електродинамічної ефективної роботи електродинамічного привода, частини відомого пристрою задається діаметром ресурс роботи таких конденсаторів має невелику електромагнітної частини і не оптимальний за величину. Так для більшості типів конденсаторів, критерієм найбільшого ККД електродинамічної що працюють в імпульсному режимі розряду, частини, що приводить до підвищеного нагрівання ресурс не перевищує 108 розрядів. Іншим і відповідно до зниження припустимої потужності і недоліком таких конденсаторів є низька питома швидкодії електродинамічної частини привода. У енергоємність. Так для сучасних серійних відомому пристрої застосовується коливальний конденсаторів перерахованих вище типів питома режим розряду конденсатора, що не забезпечує енергоємність не перевищує 50Дж/дм 3. максимальної ефективності електродинамічної В основу корисної моделі поставлена задача частини привода. При коливальному режимі створення комбінованого електрокерованого розряду конденсатора та при комутації за привода, який за рахунок ефективного сполучення допомогою тиристора, струм, що проходить через властивостей електромагнітної і котушку, являє собою одну напівхвилю розрядного електродинамічної частин привода, яке імпульсу стр уму конденсатора, тому що тиристор досягається при використанні роздільних котушок відключається при проходженні струму в котушці для електромагнітної і електродинамічної частин через нуль. Це енергетичне невигідний режим привода та при розміщені робочих поверхонь розряду, тому що до моменту відключення феромагнітної і неферомагнітної електропровідної імпульсу струм у конденсатор перезаряджається частин якоря одна практично уздовж іншої, що до напруги зі зворотним знаком. Дана напруга досягається, наприклад, при використанні менше вихідної за величиною, але тому що однотипних частин комбінованого привода відбувається зміна знака напруги, до початку (дискових, гільзових, конусних чи інших), що наступного робочого циклу електродинамічного дозволить забезпечити ефективну спільну роботу привода необхідно здійснити часткове електромагнітної і електродинамічної частин перезарядження конденсатора. Таким чином, привода на всіх ділянках руху якоря, а це у свою додаткові струми, що протікають у зарядному чергу дозволить забезпечити необхідну швидкодію пристрої, знижують ККД електродинамічного і необхідний рівень ККД комбінованого привода в цілому. Крім того, збільшення розмаху електрокерованого привода. напруги на конденсаторі до величини більшої, ніж Поставлена задача вирішується тим, що необхідна напруга заряду конденсатора, знижує розроблено комбінований електрокерований ресурс роботи конденсатора. Зазначені недоліки привід, у якому електрична енергія коливального режиму розряду конденсатора, коли перетворюється в лінійне переміщення рухливої використовується одна напівхвиля імпульсу частини привода, що включає, щонайменше, дві струму, широко відомі. Однак у практично електричні котушки і, щонайменше один якір, що використовуваних електродинамічних приводах має феромагнітну частину і не феромагнітну застосування коливального режиму розряду електропровідну частину, взаємодіючий з конденсатора обумовлено можливостями електричними котушками при підключенні останніх використовуваної комутаційної апаратури, у якості до джерела електричної енергії, щонайменше якої в даний час використовуються в основному один із яких є імпульсним джерелом електричної тиристори. Сучасна комутаційна апаратура має енергії, при цьому зовнішня робоча поверхня обмеження по швидкості наростання струму. феромагнітної частини розміщена в області Перевищення цієї швидкості наростання впливу однієї котушки, а зовнішня робоча розрядного струму в обмотці котушки приводить поверхня неферомагнітної електропровідної до необхідності збільшення потужності частини розміщена в області впливу іншої котушки комутаційного пристрою або до теплового пробою і, щонайменше одна з електричних котушок комутаційного пристрою. Крім того, керування підключена до імпульсного джерела електричної зусиллям, що розвивається електродинамічним енергії, при цьому робочі поверхні феромагнітної і приводом, в основному здійснюється шляхом неферомагнітної електропровідної частин якоря керування напругою заряду конденсатора, що є розміщені одна уздовж іншої. технологічно складним. Застосування ж Експериментально було встановлено, що для зазначеного режиму розряду конденсатора для ефективної сумісної роботи електромагнітної та 9 27945 10 електродинамічної частин комбінованого привода електропровідного матеріалу для виготовлення доцільним є таке конструктивне виконання тієї частини якоря, що є конструктивним комбінованого приводу, при якому різниця кутів елементом частини привода, що працює за між робочими поверхнями феромагнітної і принципом електродинамічного привода. Таке електропровідної неферомагнітної частин привода виконання якоря виключає можливість виникнення та віссю переміщення якоря привода складає не імпульсу механічної сили, зворотного за напрямком імпульсу сили, створюваному більше ніж 45°. Саме таке виконання комбінованого привода означає розміщення взаємодією струму електропровідної частини якоря з магнітним полем котушки зі струмом, що у робочих поверхонь феромагнітної і свою чергу дозволяє забезпечити високий рівень неферомагнітної електропровідної частин якоря ККД комбінованого привода в цілому, а, отже, одна практично уздовж іншої. Це дозволяє дозволить забезпечити необхідну швидкодію, забезпечити спрямованість виникаючих у цих частинах імпульсів сили вздовж осі переміщення частоту спрацьовування пристрою і необхідну точність роботи комбінованого електрокерованого рухливої частини привода і їх підсумовування а привода. також ефективну спільну роботу електромагнітної і Доцільним є використання однотипних частин електродинамічної частин привода на всіх комбінованого привода, наприклад, із плоскими, ділянках руху якоря. Це у свою чергу дозволяє переміщати рухливу частину привода протягом циліндричними або конусними зовнішніми робочими поверхнями. При цьому перетворення дуже коротких і точно визначених проміжків часу, електричної енергії в лінійне переміщення забезпечує необхідну швидкодію і необхідний рухливої частини привода відбувається при рівень ККД комбінованого електрокерованого спільній роботі електромагнітної та привода. Використання в конструкції комбінованого електродинамічної частин привода на всіх ділянках руху якоря. Це також дозволяє електрокерованого привода щонайменше двох забезпечити необхідну механічну міцність якоря електричних котушок, одна з яких є при його мінімальній масі, та спрощує конструктивним елементом тієї частини привода, виробництво привода, що у свою чергу дозволить що працює, використовуючи принцип роботи електромагнітного привода, а інша котушка є значно підвищити ефективність використання комбінованого привода. конструктивним елементом тієї частини привода, Для невеликих робочих переміщень якоря що працює, використовуючи принцип роботи доцільним є таке виконання привода, при якому електродинамічного привода, дозволяє зовнішні робочі поверхні феромагнітної і забезпечити оптимальні електричні і магнітні характеристики цих частин, а отже підвищити неферомагнітної електропровідної частин якоря є рівнобіжними одна одній і виконані плоскими, при потужність, досяжну швидкодію і частоту цьому зазначені поверхні якоря орієнтовані спрацьовування комбінованого привода, що поперек осі переміщення рухливої частини обмежуються властивостями загального привода, тобто в даному випадку магнітопроводу комбінованого привода у випадку використання однієї загальної електричної використовуються однотипні конструктивні елементи якоря. При такому конструктивному котушки. виконанні привід являє собою комбінований Розташування якоря з забезпеченням того, що електрокерований привід дискового типу. Таке зовнішня робоча поверхня феромагнітної частини виконання дозволить забезпечити спільну роботу розміщена в області впливу однієї котушки, а зовнішня робоча поверхня неферомагнітної електромагнітного та електродинамічного приводів на всіх ділянках руху якоря. Крім того, такий привід електропровідної частини розміщена в області забезпечує найбільшу механічну силу при впливу іншої котушки, дозволяє забезпечити мінімальних розмірах і є найпростішим у оптимальні електричні і магнітні характеристики виробництві. цих частин, однакову направленість імпульсів механічних сил, стабільну та ефективну роботу Для порівняно великих робочих переміщень якоря доцільним також є таке виконання привода, комбінованого електрокерованого привода у при якому зовнішні робочі поверхні феромагнітної і всьому діапазоні його робочих переміщень. неферомагнітної електропровідної частин якоря є Якір розробленого привода виконаний співвісними одна одній і виконані циліндричними, складеним і має феромагнітну частину і електропровідну неферомагнітну частину, кожна з при цьому зазначені поверхні якоря орієнтовані вздовж осі переміщення рухливої частини який взаємодіє з відповідною електричною привода, тобто в даному випадку котушкою. Таке конструктивне виконання якоря використовуються однотипні конструктивні комбінованого електрокерованого привода елементи електропровідного якоря. При такому дозволяє поєднати в ньому оптимальні електричні і магнітні характеристики частини, що працює за конструктивному виконанні привід являє собою комбінований електрокерований привід гільзового принципом електромагнітного привода і частини, типу. Таке виконання дозволить забезпечити що працює за принципом електродинамічного спільну роботу електромагнітного та привода, а також забезпечити необхідну механічну електродинамічного приводів на всіх ділянках руху міцність якоря при його мінімальній масі, що у свою чергу забезпечує необхідну швидкодію і якоря. Крім того, такий привід може забезпечити перемінне робоче переміщення рухливої частини необхідний рівень ККД комбінованого привода, відрізняється мінімальним діаметром і електрокерованого привода. Крім того, доцільним досить простий у виробництві. є застосування неферомагнітного 11 27945 12 Для малого та середнього діапазону робочих що дозволяє збільшити його швидкодію. Крім того, переміщень якоря доцільним також є таке при аперіодичному розряді конденсатора на виконання привода, при якому зовнішні робочі котушку електродинамічної частини комбінованого поверхні феромагнітної і неферомагнітної привода навіть при малій величині індуктивності електропровідної частин якоря є співвісними одна котушки можна одночасно одержати високу одній і виконані конусними, при цьому осі величину ККД і сили, що розвивається цією обертання зазначених поверхонь якоря частиною привода. Досягається це в такий спосіб. орієнтовані уздовж осі переміщення рухливої У зоні наростання струму через котушку частини привода, тобто в даному випадку комбінованого привода при малій зміні напруги на використовуються однотипні конструктивні конденсаторі, котушка комбінованого привода елементи електропровідного якоря. При такому послідовно кілька разів відключається і конструктивному виконанні привід являє собою підключається до конденсатора на короткий час. комбінований електрокерований привід конусного Комбінований привід при цьому виробляє кілька типу. Таке виконання дозволить забезпечити імпульсів сили з високим ККД кожного імпульсу, спільну роботу електромагнітного та необхідний же загальний імпульс сили електродинамічного приводів на всіх ділянках руху забезпечується додаванням декількох послідовних якоря. Крім того, якір такого привода відрізняється імпульсів сили. Таке керування потужністю найбільшою міцністю і твердістю при мінімальній привода фізично реалізується за рахунок процесу масі, меншим гідравлічним опором у порівнянні з широтно-імпульсної модуляції, що протікає. якорем дискового типу, має виражений ефект Незалежно від параметрів електричних котушок і автоматичного центрування і може забезпечити якоря комбінованого привода при аперіодичному максимальну швидкодію привода. розряді електролітичного конденсатора може бути Доцільним є у якості рухливої частини привода отриманий більш вигідний режим роботи привода, використання складеного якоря. Таке ніж при коливальному режимі розряду конструктивне виконання електродинамічного конденсатора. Крім того, при використанні привода дозволяє застосовувати його в різних аперіодичного режиму розряду конденсатора стає областях те хніки та у пристроях різного можливим використання енергоємних призначення. електролітичних конденсаторів, для яких режим Електричні котушки можуть бути виконані як з неглибокого розряду відповідає їх звичайному можливістю одночасного підключення до режиму роботи у якості фільтру у блоках імпульсних джерел електричної енергії, так і з живлення. можливістю незалежного підключення до Перелік графічного матеріалу імпульсних джерел електричної енергії, при цьому Фіг.1 - поперечний розріз одного з варіантів електрична котушка, в області впливу якої виконання комбінованого привода дискового типу. розміщена неферомагнітна електропровідна Фіг.2 - поперечний розріз одного з варіантів частина якоря, виконана з можливістю виконання комбінованого привода гільзового типу. підключення до імпульсного джерела електричної Фіг.3 - поперечний розріз одного з варіантів енергії через заданий інтервал часу після виконання реверсивного (двосторонньої дії) підключення до джерела електричної енергії комбінованого привода дискового типу. електричної котушки, в області впливу якої Фіг.4 - поперечний розріз іншого варіанта розміщена феромагнітна частина якоря. Таке реверсивного комбінованого привода дискового виконання комбінованого привода дозволяє в разі типу, електродинамічна частина якого містить потреби забезпечити компенсацію порівняно тільки одну електричну котушку. повільного наростання сили в тій частині привода, Фіг.5 - поперечний розріз одного з варіантів що працює за принципом електромагнітного виконання реверсивного комбінованого привода привода, а також забезпечити гнучке керування гільзового типу. комбінованим приводом у залежності від відстані, Фіг.6 - поперечний розріз одного з варіантів яка була подолана якорем при переміщенні. виконання комбінованого привода конусного типу. У якості джерела електричної енергії для Фіг.7 - схема сил, що виникають при спільній котушки, в області впливу якої розміщена роботі електромагнітної та електродинамічної феромагнітна частина якоря, може бути частин комбінованого привода дискового типу. використане джерело постійного струму, що Фіг.8 - схема сил, що виникають при спільній підключається до обмотки котушки за допомогою роботі електромагнітної та електродинамічної транзистора. частин комбінованого привода гільзового типу. Також, у якості імпульсного джерела Фіг.9 - схема сил, що виникають при спільній електричної енергії для електричних котушок може роботі електромагнітної та електродинамічної бути використаний конденсатор електролітичного частин комбінованого привода конусного типу. типу, що підключається до обмотки котушки за На Фіг.1 представлений поперечний розріз допомогою транзистора. одного з варіантів виконання комбінованого Доцільним є виконання імпульсного джерела електрокерованого привода, що є приводом електричної енергії з можливістю забезпечення дискового типу і включає електричну котушк у 1, часткового розряду конденсатора в аперіодичному поміщену у феромагнітний корпус 2, електричну режимі розряду. Це дозволяє забезпечити котушку 3, рухливу частину привода, якою є максимальну швидкість наростання струму в електропровідний якір, що складається з котушках привода, а значить і максимальну феромагнітної частини 4, електропровідної швидкість наростання механічної сили привода, неферомагнітної частини 5 і стрижня 6, у 13 27945 14 порожнині феромагнітного корпуса 2 встановлена дискового типу. Вектор F3 показує напрямок дії пружина 7. Пружина 7 попередньо стиснута та механічної сили, що виникає в електромагнітній упирається одним торцем в упор пружини 8, а частині, вектор F4 показує напрямок дії механічної іншим торцем у рухливу частин у привода. сили, що виникає в електродинамічній частині, Феромагнітний корпус 2 з електричною котушкою вектор F1 показує напрямок дії сумарної 1, електрична котушка 3, упор 8 і обмежники ходу механічної сили, що виникає в комбінованому 9 і 10 закріплені нерухомо, а феромагнітна електрокерованому приводі. частина 4, електропровідна неферомагнітна На Фіг.8 представлена схема сил, що частина 5 і стрижень 6 з'єднані між собою і мають виникають при спільній роботі електромагнітної та електродинамічної частин комбінованого привода можливість переміщатися на відстань D1 між гільзового типу. Вектор F3 показує напрямок дії обмежниками ходу 9 і 10. Електрична котушка 1, механічної сили, що виникає в електромагнітній феромагнітний корпус 2 і феромагнітна частина 4 утворюють електромагнітну частину комбінованого частині привода, вектор F4 - напрямок дії механічної сили, що виникає в електродинамічній привода. Електропровідна неферомагнітна частині привода, вектор F1 показує напрямок дії частина 5 і електрична котушка 3 утворюють сумарної механічної сили, що виникає в електродинамічну частину комбінованого привода. комбінованому електрокерованому приводі. При відсутності стр уму в електричних котушках 1 і 3 комбінованого привода під дією сили На Фіг.9 представлена схема сил, що виникають при спільній роботі електромагнітної та попередньо стиснутої пружини 7 рухлива частина електродинамічної частин комбінованого привода привода притиснута до обмежника ходу 10 і конусного типу. Вектор F3 показує напрямок дії знаходиться в положенні, показаному на Фіг.1. При механічної сили, що виникає в електромагнітній цьому між поверхнями електропровідної частини 5 і рухливою частиною залишаються повітряні частині, вектор F4 - напрямок дії механічної сили, що виникає в електродинамічній частині, вектор F1 зазори D2 і D3, необхідні для того, щоб не показує напрямок дії сумарної механічної сили, що пошкодити електричну ізоляцію котушки 3 при виникає в комбінованому електрокерованому спрацьовуванні привода. приводі. На Фіг.2 представлений поперечний розріз Робота комбінованого привода в одному з одного з варіантів виконання комбінованого варіантів його виконання, показаному на Фіг.1, привода, де привід являє собою привід гільзового здійснюється в такий спосіб. типу. Позиції на малюнку відповідають позиціям Імпульси напруг від зовнішніх імпульсних Фіг.1. джерел струму (на малюнку не показані) подають На Фіг.3 представлений поперечний розріз на обмотки котушок 1 і 3. Як правило, імпульс одного з варіантів виконання реверсивного напруги на обмотку котушки 1 подають трохи комбінованого електрокерованого привода, що є раніш, ніж на обмотку котушки 3 для компенсації приводом дискового типу. На додаток до порівняно повільного наростання сили в елементів привода, показаного на Фіг.1, ця електромагнітній частині привода і досягнення конструкція містить другу котушку 11 найбільшої сумарної сили комбінованого привода. електродинамічної частини привода, відповідну їй Під дією виникаючих імпульсів механічної сили в електропровідну неферомагнітну частину 12 частинах 4 і 5 р ухлива частина комбінованого якоря, феромагнітну частину 13 якоря, електричну привода переборює силу стиску пружини і котушку 14, розміщену в корпусі 15 другої переміщається, при цьому скорочується величина електромагнітної частини привода. На Фіг.4 представлений поперечний розріз робочого зазору D1. Наприкінці робочого ходу рухлива частина упирається в обмежник ходу 9, іншого варіанта реверсивного комбінованого при цьому між поверхнею феромагнітного диска 4 і електрокерованого привода, що є приводом феромагнітного корпусу 2 залишається повітряний дискового типу, електродинамічна частина якого містить тільки одну електричну котушку 3. Ін ші зазор D4 для запобігання ефекту «залипання». позиції на фігурі відповідають позиціям Фіг.1 і 3. Після припинення подачі напруги на обмотку На Фіг.5 представлений поперечний розріз котушки 1 величина механічної сили, що одного з варіантів виконання реверсивного створюється електромагнітною частиною привода, комбінованого електрокерованого привода, що є починає зменшува тися і у момент, коли величина приводом гільзового типу. Позиції на малюнку цієї сили стане менше сили стиску пружини 7, відповідають позиціям Фіг.1 і 3. рухлива частина привода переміщається у вихідне На Фіг.6 представлений поперечний розріз положення під дією сили стиску пружини 7. При одного з варіантів виконання комбінованого досягненні рухливою частиною обмежника ходу 10 привода, де привід являє собою привід конусного цикл роботи привода завершується. типу. Причому робоча поверхня феромагнітної Робота реверсивного комбінованого частини якоря знаходиться під кутом 16 до осі 17 електрокерованого привода в одному з варіантів переміщення якоря а робоча поверхня його виконання, показаному на Фіг.3 здійснюється електропровідної неферомагнітної частини якоря в такий спосіб. знаходиться під кутом 18 до осі переміщення Імпульси напруг від зовнішніх імпульсних якоря. Інші позиції на малюнку відповідають джерел струму (на малюнку не показані) подають позиціям фігури 1. на обмотки котушок 1 і 3. Як правило, імпульс На Фіг.7 представлена схема сил, що напруги на обмотку котушки 1 подають трохи виникають при спільній роботі електромагнітної та раніше, ніж на обмотку котушки 3 для компенсації електродинамічної частин комбінованого привода порівняно повільного наростання сили в 15 27945 16 електромагнітній частині привода і досягнення магнітним потоком, створеним струмом в обмотці найбільшої сумарної сили комбінованого привода. електричної котушки 3 (закон Ампера), у Під дією виникаючих імпульсів механічної сили в результаті чого виникає імпульс механічної сили, дисках 4 і 5 рухлива частина комбінованого що має ту ж тривалість, що й імпульс струм у в привода переборює силу інерції і переміщається, обмотці котушки 3, імпульс магнітного потоку й при цьому скорочується величина робочого зазору імпульс вихрових стр умів в об'ємі матеріалу частини 3. Напрямок цього імпульсу сили показано D1. Наприкінці прямого робочого ходу рухлива частина упирається в обмежник ходу 9, при цьому на Фіг.1 напрямком вектора F1. Таким чином, при подачі імпульсів напруги на обмотки електричних між поверхнею феромагнітного диска 4 і котушок 1 і 3, обидві частини комбінованого феромагнітного корпусу 2 залишається повітряний привода створюють механічні сили, що діють в зазор D4 для запобігання ефекту «залипання», одному напрямку, хоча внесок цих сил у рух прямий робочий хід завершується. Рухлива рухливої частини комбінованого привода на різних частина залишається в цьому положенні, поки не фазах р уху різний. буде припинена подача напруги на обмотку У початковий момент часу переміщення котушки 1. Потім припиняють подачу напруги на рухливої частини відбувається в основному під обмотку котушки 1, і подають імпульси напруг на дією імпульсу механічної сили, створюваного обмотки котушок 11 і 14. Під дією виникаючих частиною привода, що працює за принципом імпульсів механічної сили в дисках 12 і 13 рухлива роботи електродинамічного привода. Короткий і частина комбінованого привода переборює силу швидко наростаючий імпульс механічної сили інерції і переміщається в вихідне положення. При створює значне прискорення рухливої частини досягненні рухливою частиною обмежника ходу 10 комбінованого привода. У цей же час у частині цикл роботи привода завершується. привода, що працює за принципом Робота реверсивного комбінованого привода в електромагнітного привода, внаслідок високої одному з варіантів його виконання, показаному на індуктивності котушки 1 і великої величини Фіг.4, здійснюється аналогічно попередньому повітряного зазору D1, механічна сила незначна і варіанту привода, але імпульси напруг в наростає повільно. електродинамічній частині привода подаються на В міру проходження частини повітряного обмотку котушки 3, яка працює як при прямому, робочого зазору сила, створювана так і при зворотному ході р ухливої частини. електродинамічною частиною привода, Більш докладно процеси, що протікають у ході зменшується і, після закінчення дії короткого роботи привода, описуються нижче. імпульсу сили, припиняється. У цей же час в У комбінованому електрокерованому приводі, обмотці котушки 1 струми досягають свого при подачі імпульсу напруги на обмотку котушки 1, максимального значення і в міру скорочення у цій обмотці виникає імпульс струму, що викликає імпульс магнітного потоку, що замикається через робочого зазору D1, імпульс механічної сили, корпус 2 і феромагнітний диск 4, які утворюють створюваний електромагнітною частиною магнітопровід електромагнітної частини привода, починає відігравати основну роль у комбінованого привода. При цьому рухлива переміщенні рухливої частини приводу. Крім того, частина магнітопроводу прагне зайняти таке після проходження рухливою частиною робочого положення, коли довжина середньої магнітної лінії зазору D1, імпульс механічної сили, створюваний магнітопроводу буде мати мінімальну величину. електромагнітною частиною, використовується Таким чином, імпульс сили, створюваний для утримання рухливої частини в піднятому електромагнітною частиною комбінованого положенні. Після припинення подачі напруги на привода має напрямок, показаний на Фіг.1 обмотку котушки 1, величина механічної сили, напрямком вектора F1. створюваної електромагнітною частиною привода, При подачі імпульсу напруги на обмотку починає зменшуватися і, у момент, коли величина котушки 3, у цій обмотці виникає імпульс струму, цієї сили стане рівною силі стиску пружини 7, що створює імпульс магнітного потоку, зчеплений рухлива частина привода починає рух у вихідне з електропровідною неферомагнітною частиною 5 положення під дією сили стиску пружини 7. При якоря, виконаної у виді диска, і що має ту ж цьому час переходу рухливої частини у вихідне тривалість, що й імпульс струму в обмотці котушки положення визначається масою рухливої частини і 3. Магнітний потік, що змінюється в часі, внаслідок величиною сили попереднього стиску і твердістю ефекту електромагнітної індукції, наводить у пружини 7. електропровідному матеріалі частини 5 імпульс Таким чином, перетворення електричної електрорушійної сили е тієї ж тривалості, що й енергії в лінійне переміщення рухливої частини імпульси струму і магнітного потоку. Математично привода здійснюють шляхом подачі в нерухомі закон електромагнітної індукції описується електричні котушки 1 і 3 імпульсів струму від формулою: імпульсних джерел електричної енергії. Попередньо здійснюють накопичення енергії, dФ e = перетвореної в імпульс механічної сили, за dt . допомогою конденсаторів. При включенні Під дією імпульсу електрорушійної сили е в комутуючого пристрою, у якості якого використані електропровідній неферомагнітній частині 5 транзистори, конденсатори розряджають на виникає імпульс кругових ви хрових струмів. Ці електричні котушки 1 і 3. Таким чином, здійснюють вихрові стр уми взаємодіють із проникаючим у перехід частини запасеної в конденсаторах електропровідну неферомагнітну частину 5 електричної енергії в електромагнітну енергію 17 27945 обмоток електричних котушок 1 і 3. Частина запасеної енергії витрачається на нагрівання провідників котушок 1 і 3, а також витрачається на теплові втрати від створюваних вихрови х стр умів у корпусних деталях і т.п. Частина електромагнітної енергії, що залишилася, створює імпульс магнітного потоку, що замикається в магнітопроводі електромагнітної частини комбінованого привода, при цьому виконується притягання феромагнітної частини якоря до корпуса котушки 1, за рахунок чого здійснюють необхідний вплив на переміщуваний об'єкт. Інша частина електромагнітної енергії створює електромагнітне поле навколо обмотки електричної котушки 3, і тим самим здійснюють часткову передачу індуктивним шляхом електромагнітної енергії в неферомагнітну частину 5 якоря привода. Проникаючий у не феромагнітну частину 5 якоря перемінний електромагнітний потік наводить в ній вихровий струм, що взаємодіючи з магнітним потоком, що проникнув у електропровідну частину 5 якоря, створює імпульс механічної сили. При цьому виконується відштовхування електропровідної неферомагнітної частини 5 від котушки 3, за рахунок чого здійснюють необхідний вплив на переміщуваний об'єкт. Частини 4, 5 і стрижень 6 з'єднані між собою, у наслідок чого створювані в них імпульси механічної сили складаються. Таким чином, корисна модель, що заявляється, являє собою комбінований електрокерований привід, який за рахунок ефективного сполучення властивостей електромагнітної і електродинамічної частин привода, яке досягається при використанні роздільних котушок для електромагнітної і електродинамічної частин привода та при розміщені робочих поверхонь феромагнітної і неферомагнітної електропровідної частин якоря одна уздовж іншої, що досягається, наприклад, при використанні однотипних частин комбінованого привода (дискових, гільзових, конусних чи інши х), що дозволяє забезпечити ефективну спільну роботу електромагнітної і електродинамічної частин привода на всіх ділянках руху якоря, а це у свою чергу дозволяє забезпечити необхідну швидкодію і необхідний рівень ККД комбінованого електрокерованого привода. 18 19 27945 20
ДивитисяДодаткова інформація
Назва патенту англійськоюCombined electrically controlled drive
Автори англійськоюKorohodskyi Volodymyr Anatoliiovych, Kyryliuk Ihor Olehovych, Lomov Serhii Heorhiiovych
Назва патенту російськоюКомбинированный электроуправляемый привод
Автори російськоюКорогодский Владимир Анатольевич, Кирилюк Игорь Олегович, Ломов Сергей Георгиевич
МПК / Мітки
МПК: F01L 9/04
Мітки: привід, комбінований, електрокерований
Код посилання
<a href="https://ua.patents.su/10-27945-kombinovanijj-elektrokerovanijj-privid.html" target="_blank" rel="follow" title="База патентів України">Комбінований електрокерований привід</a>
Комбінований привід комутаційного апарата
Номер патенту: 59153
Опубліковано: 15.08.2003
Автор: Гільов Олександр Олександрович
МПК: G05F 3/02, H01H 1/00, H01H 33/66
Мітки: апарата, привід, комбінований, комутаційного
Формула / Реферат:
1. Комбінований привід комутаційного апарата, що містить корпус з феромагнітного матеріалу та якір з того ж матеріалу, що переміщується усередині котушки, який відрізняється тим, що на якорі виконана проточка з розміщеним у ній кільцем із провідного неферомагнітного матеріалу.2. Комбінований привід комутаційного апарата за п. 1, який відрізняється тим, що котушка не охоплює область переміщення якоря.3. Комбінований привід...
Реверсивний комбінований привід комутаційного апарата
Номер патенту: 59154
Опубліковано: 15.08.2003
Автор: Гільов Олександр Олександрович
МПК: G05F 3/02, H01H 33/66, H01H 3/00
Мітки: апарата, комутаційного, привід, комбінований, реверсивний
Формула / Реферат:
1. Реверсивний комбінований привід комутаційного апарата, який містить корпус з феромагнітного матеріалу, якір з того ж матеріалу, що переміщається усередині котушки, розміщеної в цьому корпусі, а також спіральну котушку індукційно-динамічного механізму, до якої у вихідному стані прилягає диск із провідного неферомагнітного матеріалу, зв'язаний з якорем і рухливою частиною електричного апарата, який відрізняється тим, що електричний імпульс...
Швидкодіючий індукційно-динамічний привід
Номер патенту: 63515
Опубліковано: 15.01.2004
Автори: Лакс Вячеслав Костянтінович, Яуфман Анатолій Іванович, Пінская Ірина Володимирівна, Попов Олег Якович, Богуцкий Володимир Борисович
Мітки: привід, індукційно-динамічний, швидкодіючий
Формула / Реферат:
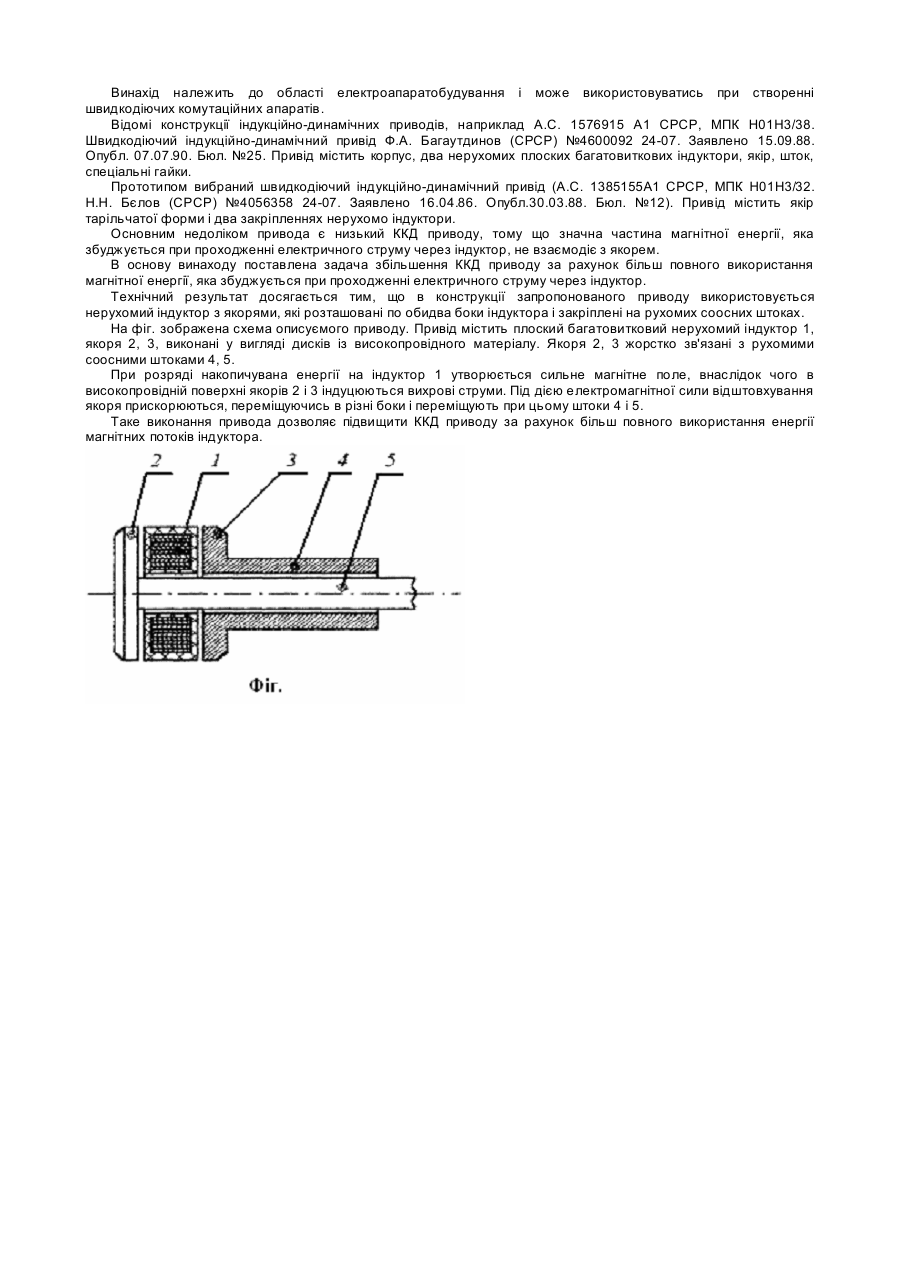
Швидкодіючий індукційно-динамічний привід, який містить плоский багатовитковий індуктор і якорі, виконані у вигляді дисків із високопровідного матеріалу, який відрізняється тим, що якорі розташовані по обидва боки індуктора.
Комбінований привід мотовила жатки

Номер патенту: 51023
Опубліковано: 15.11.2002
Автори: Мороз Микола Миколайович, Кумпан Віктор Карпович, Сисолін Петро Васильович, Павлик Володимир Іванович, Сисоліна Ірина Петрівна
МПК: A01D 75/00
Мітки: комбінований, привід, жатки, мотовила
Формула / Реферат:
Комбінований привід мотовила жатки, який складається з вала відбору потужності трактора, ланцюгових та пасових передач, обгінних муфт, який відрізняється тим, що вал мотовила має два незалежних приводи: один від вала відбору потужності через знижувальний редуктор і другий, ланцюговий привід, від опорно-привідного колеса жатки, які роз'єднані обгінними муфтами.
Двоканальний комбінований привід

Номер патенту: 73021
Опубліковано: 16.05.2005
Автори: Горбатюк Микола Васильович, Матусевич Володимир Анатолійович, Павлюк Євген Вікторович, Малюшкін Сергій Олександрович
МПК: B64C 13/00
Мітки: привід, комбінований, двоканальний
Формула / Реферат:
Двоканальний комбінований привід, що має електродвигун, гідромотор, гідравлічну головку керування, електромеханічну гальмівну муфту, гідромеханічне гальмо, редуктор, який складається з планетарного диференціального механізму, триланкових планетарних і рядних узгоджуючих зубчастих передач, вихідний вал, блок датчиків положення вала і кінцевих мікроперемикачів, який відрізняється тим, що електродвигун, встановлений в одному кінематичному...
Попередній патент: Спосіб отримання відсадків клонових підщеп яблуні без розгалужень стовбура
Наступний патент: Фіксатор для корекції деформацій грудини та ребер
Випадковий патент: Дифузійний апарат нахиленого типу