Система цілевказування
Номер патенту: 36943
Опубліковано: 15.04.2003
Автори: Борисюк Анатолій Олексійович, ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ

Формула / Реферат
1. Система цілевказування оператора, яка містить розміщені на шоломі оператора реперні елементи, які формують дані орієнтації шолому, та блок індикації з оптичним вузлом виведення зображення індикації в поле зору оператора, а також розміщені поза шоломом засіб оптичної локації, блок синхронізації та блок формування сигналів цілевказування, яка відрізняється тим, що реперні елементи, не менше трьох, розміщені в єдиній конструктивній збірці з блоком індикації, в площині, нормаль до якої зорієнтована під відомими кутами до вектора орієнтації шолома та оптичних осей блока індикації, крім того, засіб оптичної локації розміщується в зоні, розташованій поблизу осі симетрії просторової фігури, яка відповідає зоні огляду оператора, наприклад льотчика, при зміні положення шолома в процесі його функціонування, при цьому додатково введено блок коригуючих поправок сигналів цілевказування, який своїм виходом приєднаний до блока формування сигналів цілевказування.
2. Система за п. 1, яка відрізняється тим, що блок коригуючих поправок сигналів цілевказування містить вузол введення поправок, вузол зберігання поправок та блок поправок вихідних (початкових) параметрів формування сигналів цілевказування, причому вихід вузла введення поправок через вузол зберігання поправок зв'язаний з входом блока формування сигналів цілевказування.
3. Система за п. 2, яка відрізняється тим, що блок коригуючих поправок сигналів цілевказування містить блок коригування сигналів цілевказування, перший вхід якого з'єднаний з виходом блока формування сигналів цілевказування, другий вхід якого з'єднаний з вузлом зберігання поправок, а його вихід є виходом системи.
4. Система за п. 1, яка відрізняється тим, що засіб оптичної локації встановлений з використанням оптичної головки індикатора лобового скла таким чином, що зона локації суміщена із зоною розташування реперних елементів, а осі засобу оптичної локації орієнтовані відносно оптичних осей оптичної головки індикатора лобового скла.
5. Система за п. 4, яка відрізняється тим, що засіб оптичної локації розміщений на оптичній головці індикатора за допомогою кронштейна, в якому посадочні місця для кріплення його блоків виконані регульованими із забезпеченням їх розворотів до заданого суміщення зони локації засобу оптичної локації із зоною розташування реперних елементів, а також забезпеченням контролю положення системи координат засобу оптичної локації відносно оптичних осей оптичної головки індикатора.
6. Система за п. 1, яка відрізняється тим, що блок індикації з реперними елементами розміщений на шоломі за допомогою кронштейна, який кріпиться до шолома, а посадочне місце для встановлення блока індикації виконано регульованим з можливістю його переміщення в напрямках, що забезпечують суміщення зони виведення індикації з полем зору льотчика.
7. Система за п. 1, яка відрізняється тим, що реперні елементи обладнані імерсійними лінзами, в фокальній поверхні яких встановлені самі елементи.
8. Система за п. 1, яка відрізняється тим, що реперні елементи виконані у вигляді точкових джерел випромінювання, наприклад інфрачервоних випромінюючих діодів, а засіб оптичної локації виконаний у вигляді фотоприймального кутовимірювального блока.
9. Система за п. 8, яка відрізняється тим, що блок синхронізації містить генератор модуляції реперних джерел випромінювання частотою fN, а також фазоімпульсний селектор, при цьому генератор модуляції з'єднаний з джерелами випромінювання та фазоімпульсним селектором, а засіб оптичної локації через фазоімпульсний селектор з'єднаний з блоком формування сигналів цілевказування.
10. Система за п. 9, яка відрізняється тим, що реперні елементи вибрані, виходячи з умов їх модуляції однією частотою fM, причому фази сигналів модуляції реперних елементів рознесені на величину, що вибрана з умови: ![]() де N - кількість реперних елементів.
де N - кількість реперних елементів.
11. Система за п. 1, яка відрізняється тим, що реперні елементи виконані у вигляді фотодетекторів, а засіб оптичної локації виконаний у вигляді блока сканування світловими пучками простору розташування реперних фотодетекторів.
Текст
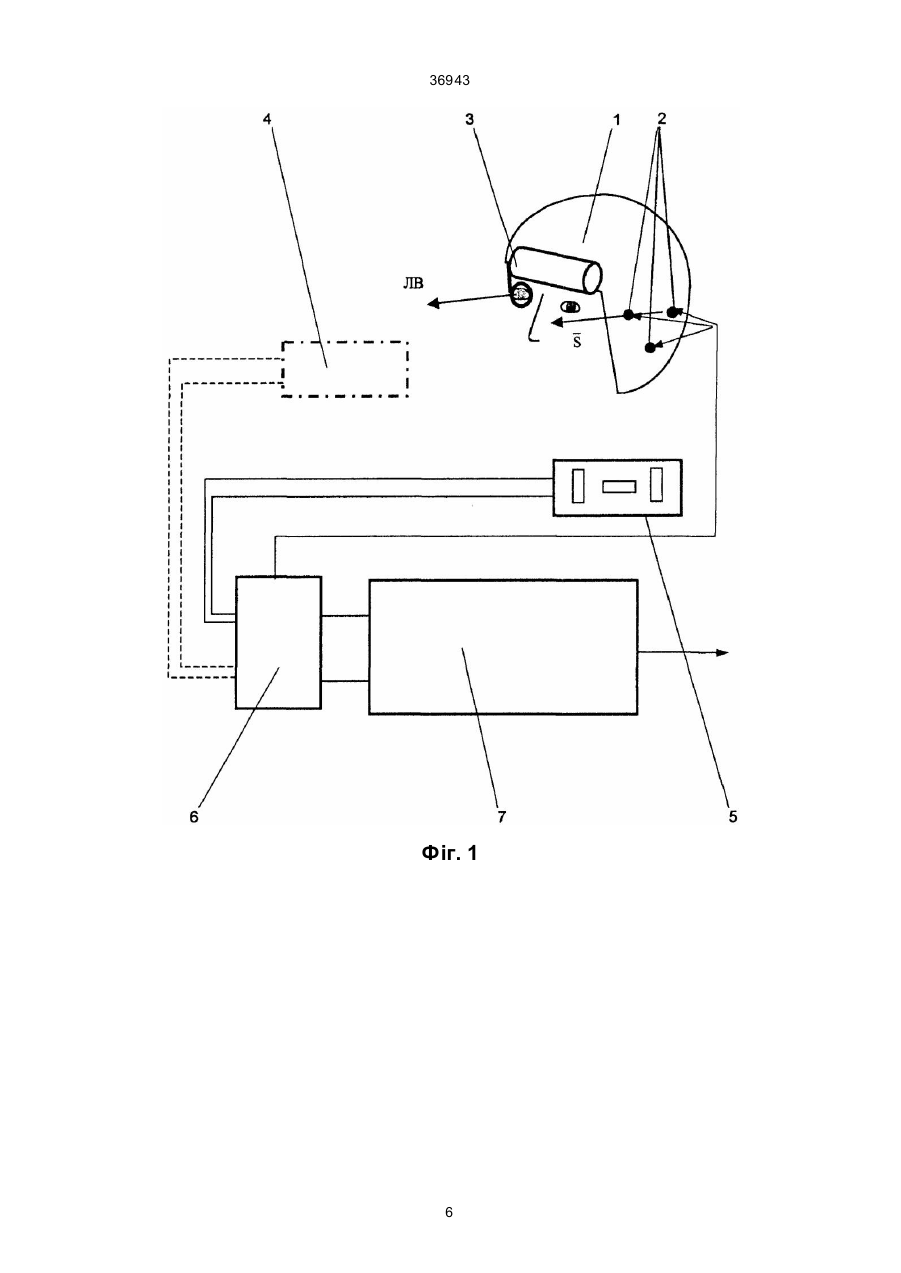
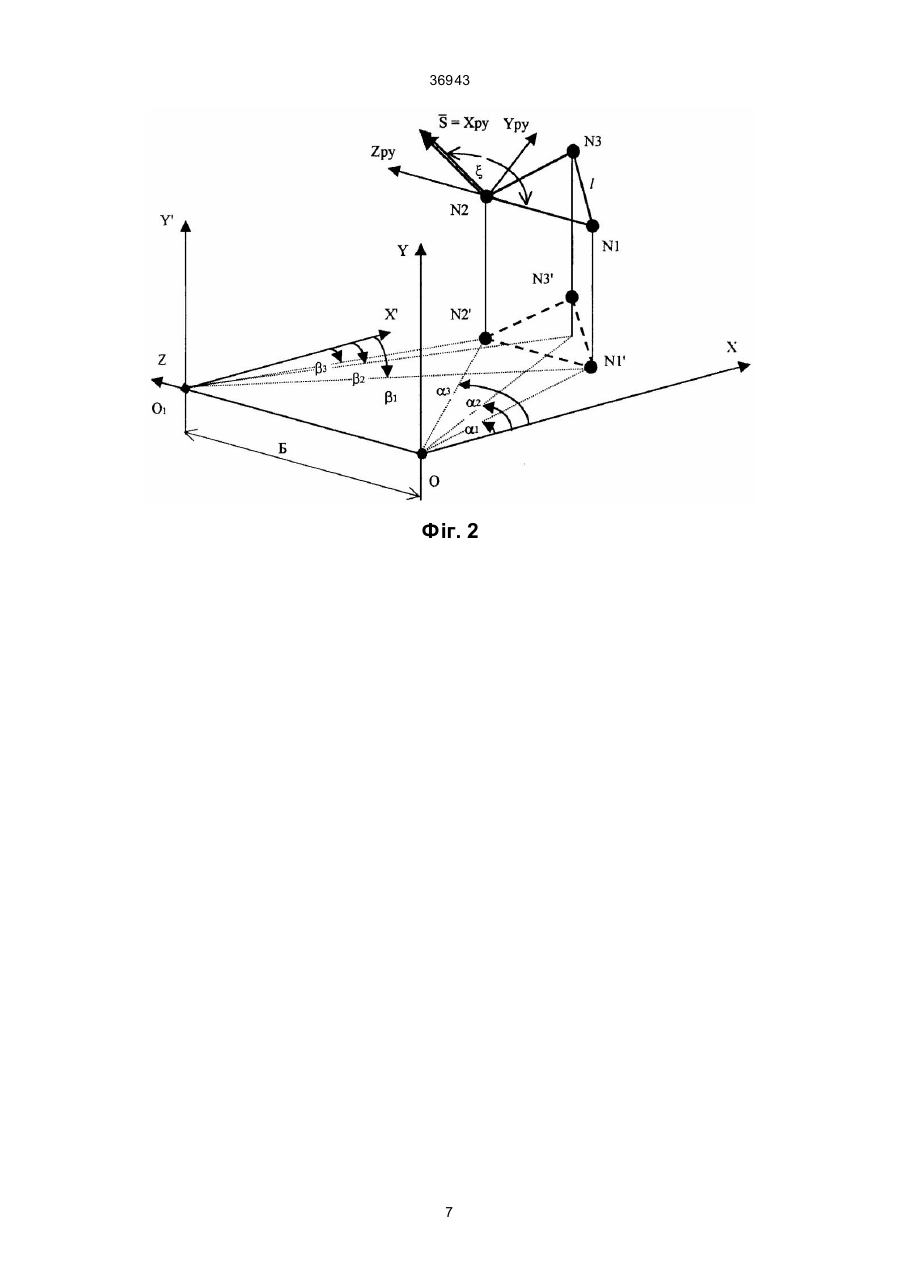
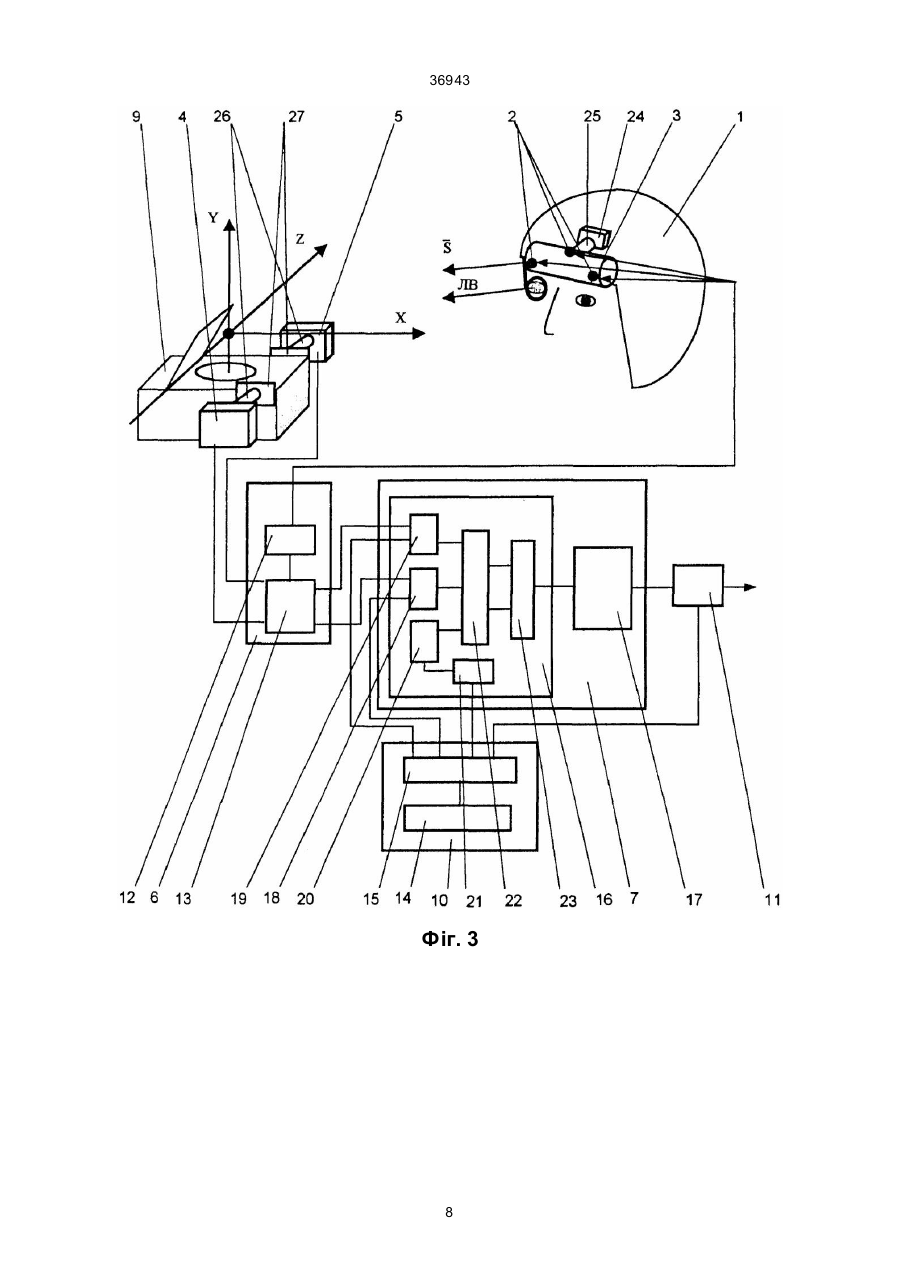
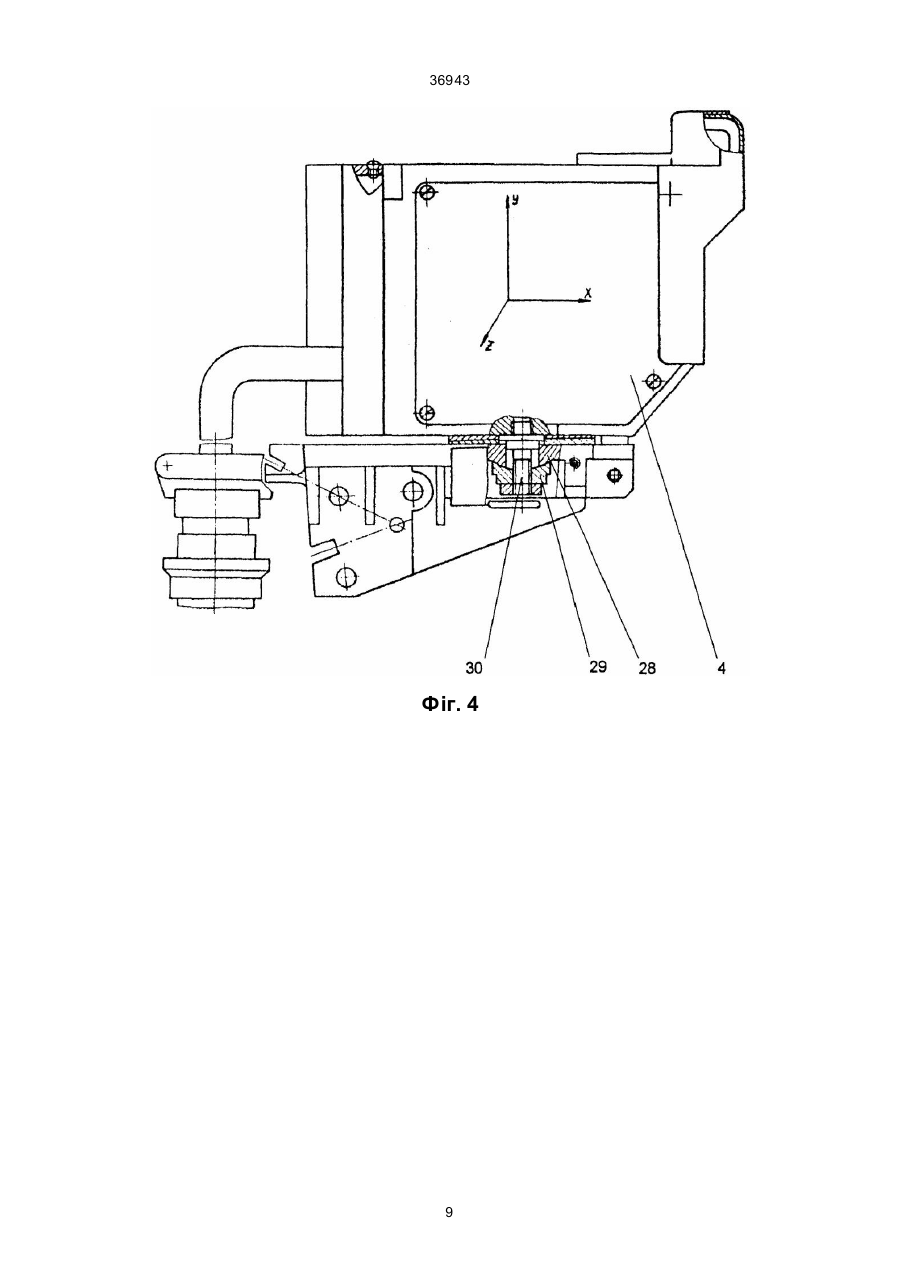
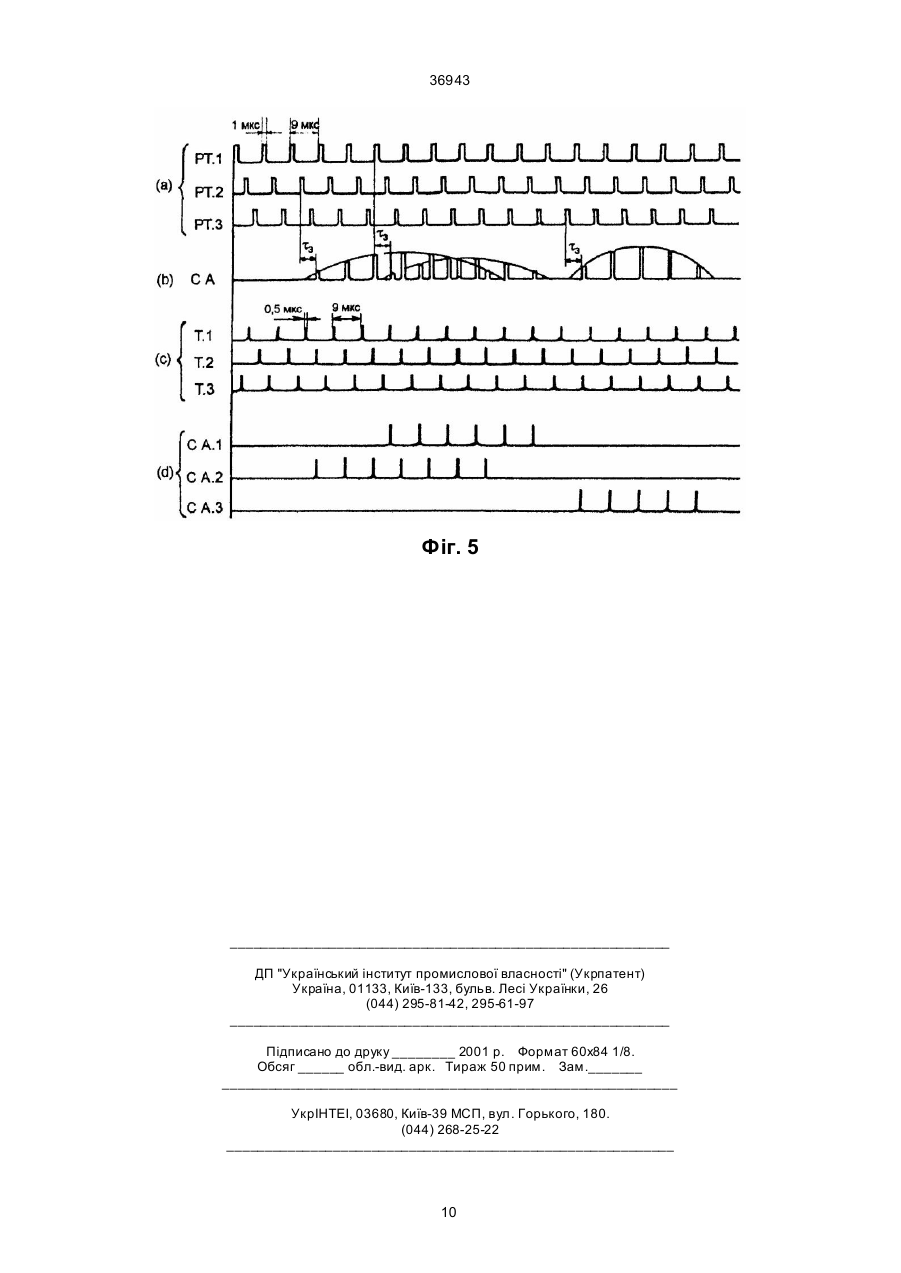
1. Система цілевказування оператора, яка містить розміщені на шоломі оператора реперні елементи, які формують дані орієнтації шолома, та блок індикації з оптичним вузлом виведення зображення індикації в поле зору оператора, а також розміщені поза шоломом засіб оптичної локації, блок синхронізації та блок формування сигналів цілевказування, яка відрізняється тим, що реперні елементи, не менше трьох, розміщені в єдиній конструктивній збірці з блоком індикації, в площині, нормаль до якої зорієнтована під відомими кутами до вектора орієнтації шолома та оптичних осей блока індикації, крім того, засіб оптичної локації розміщується в зоні, розташованій поблизу осі симетрії просторової фігури, яка відповідає зоні огляду оператора, наприклад льотчика, при зміні положення шолома в процесі його функціонування, при цьому додатково введено блок коригуючих поправок сигналів цілевказування, який своїм виходом приєднаний до блока формування сигналів цілевказування. 2. Система по п. 1, яка відрізняється тим, що блок коригуючих поправок сигналів цілевказування містить вузол введення поправок, вузол зберігання поправок та блок поправок вихідних (початкових) параметрів формування сигналів цілевказування, причому вихід вузла введення поправок через вузол зберігання поправок зв'язаний з входом блока формування сигналів цілевказування. 3. Система по п. 2, яка відрізняється тим, що блок коригуючих поправок сигналів цілевказування містить блок коригування сигналів цілевказування, перший вхід якого з'єднаний з виходом блока формування сигналів цілевказування, другий вхід якого з'єднаний з вузлом зберігання поправок, а його вихід є виходом системи. 4. Система по п. 1, яка відрізняється тим, що засіб оптичної локації встановлений з використанням оптичної головки індикатора лобового скла таким чином, що зона локації суміщена із зоною розташування реперних елементів, а осі засобу оптич A (54) СИСТЕМА ЦІЛЕВКАЗУВАННЯ 36943 ________________________________ Винахід відноситься до галузі спеціального оптичного приладобудування, зокрема – до систем дистанційного визначення орієнтації рухомих об'єктів, і може бути використаний при створенні систем робототехніки, а саме – пристроїв, що визначають положення робочого органа маніпулятора, а також систем управління, де використовуються дані про розвороти голови оператора, систем візуалізації тренажерів на основі нашоломного індикатора, систем віртуальної реальності тощо. Нині широко застосовуються для наведення різних керованих підсистем, перемикання органів управління без застосування рук за рахунок використання даних про розвороти голови оператора, так звані нашоломні системи цілевказування. Відомі пристрої, що використовуються при створенні нашоломних систем цілевказування, наприклад, патент США № 3375375. Пристрій містить розміщені на захисному шоломі оптичний блок виведення індикації в поле зору льотчика та набір N реперних елементів, де N³2, наприклад, фотодетекторів, які розміщуються на лінії, що колінеарна до оптичних осей блока виведення індикації, а також розміщені на базовому блоці (нерухомій основі) М оптико-електронних локаційних блоків, де М³2, які сканують світловими пучками простір знаходження захисного шолома і визначають кути-пеленги на реперні елементи, електронний блок з обчислювачем формування даних орієнтації рухомого об'єкта. У таких пристроях виконується визначення кутів-пеленгів на реперні елементи, потім визначення просторових координат реперних елементів, використовуючи які визначається орієнтація оптичного блока виведення індикації, а значить, і рухомого об'єкта (захисного шолому). Дані орієнтації рухомого об'єкта – сигнали цілевказування – використовують для керування різноманітними системами. Точність сигналів цілевказування визначається як точністю визначення просторових координат реперних елементів, так і точністю взаємної орієнтації реперних елементів та оптичного блока виведення індикації. У даному пристрої, де оптичний блок розташований на передній частині шолому оператора, а реперні точки – на бокових частинах шолому, коли необхідно витримати паралельність оптичної осі оптичного блока виведення індикації і лінії, на якій встановлюються реперні точки, точність формування сигналів цілевказування багато в чому визначатиметься стабільністю їх взаємної орієнтації. Конструкція типового шолома льотчика забезпечує як його міцність, так і достатню пружність для забезпечення індивідуальної підгонки шолома. Пружність шолома приводить у процесі експлуатації до зміщення окремих ділянок шолома одна відно збільшує масу обладнання, яке розміщується на шоломі. У пристрої також необхідно використовувати два комплекти оптико-електронних локаційних блоків, по одному з кожної бічної сторони від оператора, кожний з яких забезпечує визначення сигналів цілевказування тільки в половині діапазону роботи пристрою, що збільшує склад обладнання в два рази. Відомий пристрій, описаний у патенті Великобританії № 2002986 і взятий як прототип, блоксхема якого наведена на фіг. 1, який містить на кожній бічній стороні рухомого об'єкта 1 (на поверхні захисного шолома оператора) не менше 2 реперних випромінювачів 2, причому два реперних випромінювачі розміщуються на лінії, яка колінеарна вектору орієнтації рухомого об'єкта, та оптичний блок виведення індикації 3, а на нерухомому об'єкті (бічних частинах кабіни літака) встановлені оптико-локаційні блоки 4 і 5. До складу відомого пристрою входить також блок синхронізації 6 та блок формування сигналів цілевказування 7. Недоліками відомого пристрою є: великі сумарні габаритні розміри і маса обладнання на захисному шоломі, коли оптичний блок виведення індикації та реперні елементи рознесені по поверхні захисного шолому, а точність їх взаємного узгодження забезпечується за рахунок посилення вимог до конструкції шолома; необхідність використання не менше двох оптико-локаційних блоків, що складаються з декількох вузлів, об'єднаних в єдину конструкцію, кожний з яких визначає дані просторового положення реперних точок (а значить, і орієнтації захисного шолома) тільки при розвороті захисного шолома в його сторону. Розміщення реперних елементів (реперних випромінювачів) на бічних частинах захисного шолома, призводить також до необхідності встановлення оптико-локаційних блоків на бічних частинах кабіни літального апарату, які не пов'язані жорстко з системою координат літального апарату, наприклад, ліхтар кабіни, що ускладнює взаємне юстирування. Завдання технічного рішення: створення оптико-електронної нашоломної системи цілевказування з малогабаритним нашоломним вузлом (реперно-індикаторною збіркою) із забезпеченням можливості його встановлення на стандартний захисний шолом льотчика, при цьому сама система повинна мати можливість установлення на літальний апарат із спрощеною схемою прив'язки до системи координат літального апарату. Суть те хнічного рішення полягає в тому, що реперні елементи конструктивно поєднані з оптичним блоком індикації (розміщуються безпосередньо на його корпусі), що обумовлює мінімальні габаритно-масові параметри реперно-індикаторної збірки, яка розміщується на захисному шоломі, а оптико-локаційний блок, виконаний у вигляді двох рознесених на деяку відстань вузлів, установлюється перед льотчиком. У зв'язку з використанням одного оптико-локаційного блока, кожний з вузлів якого визначає тільки частину даних, необхідних для визначення координат реперних елементів, сно одної на величину D ³ 1o , що не дозволяє даному пристрою здійснювати цілевказування для високоточних систем, наприклад, для систем спостереження з полем зору »1°. Для забезпечення вимог по точності необхідно посилити вимоги до жорсткості конструкції шолома, наприклад, вводити додаткові кронштейни між місцями встановлення оптичного блока та реперних точок, що 2 36943 підвищуються вимоги до точності встановлення цих вузлів та до апертури випромінювання реперних джерел (її розширення), при цьому необхідна працездатність системи забезпечується за рахунок проведення корегування параметрів установлення оптико-локаційних блоків та ви хідних сигналів орієнтації рухомого об'єкта, а також забезпечення модуляції реперного випромінювання. Геометрична схема випромінювання орієнтації рухомого об'єкта, коли реперні елементи розміщені в площині, до якої його вектор орієнтації розташований під відомим кутом x, наведена на фіг. 2. Наведені нижче формульні залежності визначення кутового положення вектора S ілюструють працездатність геометричної схеми вимірювання, в якій реперні елементи – точки (РТ), не менше трьох, розташовуються в площині XрвO рв Yрв, утворюючи рівнобедрений трикутник з відомою стороною l . Використовуються два оптико-локаційні вузли, які вимірюють кути між напрямками на проекцію РТ на площину XOZ відлікової системи координат та віссю OZ. Точки відліку кутів-пеленгів О, О1 зміщені одна відносно одної вздовж осі OZ на відстань Б. Координати проекцій Ni реперних точок, де і=1, 2, 3, на площині XOZ: xi= zi × tga i , x i = (Б - zi ) × tgb i . звідки Б × tga i tgb i Б × tgb i xi = ; zi = . tga i + tgb i tga i + tgb i Рівняння площини Ax+By+C z+D=0, в якій знаходяться реперні точки N, може бути записане через координати точок Ni у відліковій системі координат: x - x1 y - y1 z - z1 x 2 - x1 y 2 - y1 z2 - z1 = 0. x3 - x1 y 3 - y1 z3 - z1 У цьому випадку, розкриваючи визначник по першому рядку, маємо: y - y1 z2 - z1 x - x1 z2 - z1 A= 2 ; B= 2 ; y 3 - y 1 z3 - z1 x3 - x1 z3 - z1 С= x 2 - x1 x 3 - x1 захисного шолому, розміщені в єдиній конструктивній збірці з оптичним блоком індикації, причому вони розміщені в площині, нормаль до якої зорієнтована під відомими кутами до вектора орієнтації шолома та оптичних осей блока індикації, розташований поза шоломом засіб оптичної локації розміщується в зоні, розташованій поблизу осі симетрії просторової фігури, яка відповідає зоні огляду оператора, наприклад, льотчика, при зміні положення шолома в процесі його функціонування, система також має в своєму складі блок синхронізації, блок формування сигналів цілевказування, блок корегуючих поправок сигналів цілевказування. Блок корегуючих поправок сигналів цілевказування містить вузол введення поправок, вузол зберігання поправок та блок поправок вихідних (початкових) параметрів формування сигналів цілевказування, а також блок корегування сигналів цілевказування. Засіб оптичної локації встановлений з використанням оптичної головки індикатора лобового скла таким чином, що зона локації суміщена із зоною розташування реперних елементів, а осі засобу оптичної локації орієнтовані відносно оптичних осей оптичної головки індикатора. Засіб оптичної локації розміщений на оптичній головці індикатора за допомогою кронштейна, в якому посадочні місця для кріплення його блоків виконані регульованими із забезпеченням їх розворотів до заданого суміщення зони локації засобу оптичної локації із зоною розташування реперних елементів, при цьому забезпечується контроль положення системи координат засобу оптичної локації відносно оптичних осей оптичної головки індикатора лобового скла. Оптичний блок індикації з реперними елементами розміщений на шоломі за допомогою кронштейна, який кріпиться до шолома, а посадочне місце для встановлення блока індикації виконано регульованим з можливістю його переміщення в напрямках, що забезпечують суміщення зони виведення індикації з полем зору льотчика. Реперні елементи обладнані імерсійними лінзами, в фокальній поверхні яких установлені самі елементи. Реперні елементи виконані у вигляді точкових джерел випромінювання, наприклад, ІЧ випромінюючих діодів, а засіб оптичної локації виконаний у вигляді фотоприймального кутовимірювального блока. Блок синхронізації містить генератор модуляції реперних джерел випромінювання частотою fN, а також фазоімпульсний селектор. Реперні елементи вибирають, виходячи з умов їх модуляції однією частотою fМ, причому фази сигналів модуляції реперних елементів розносять на величину, що вибирається з умови: y 2 - y1 , y 3 - y1 тобто A = Dy 21Dz31 - Dy 31Dz21; B = Dx 21D z31 - D y 31Dz 21; C = Dx 21D y 31 - D x31D y 21, де Dx 21 = x 2 - x1; Dx31 = x3 - x1; Dz21 = z 2 - z1; Dz31 = z3 - z1; 2 2 2 Dy 21 = l 2 - D x21 - Dz 2 ; Dy 31 = l 2 - Dx31 - Dz31 . 21 Оскільки вектор S перпендикулярний до площини розміщення реперних точок (кут x=90°), то його положення визначається наступними кутами у відліковій системі координат: o Dj 360 / N , де N - кількість реперних елементів. = Реперні елементи виконані у вигляді фотодетекторів, а засіб оптичної локації виконаний у вигляді блока сканування світловими пучками простору розташування реперних фотодетекторів. Викладена суть способу та пристрою, що пропонуються, пояснюється наступним описом та кресленнями, де зображені: на фіг. 1 – блок-схема існуючого пристрою; на фіг. 2 – геометрична схема æ ö C B ÷. ; j z = arctgç ç A 2 2 ÷ è A -C ø Поставлене завдання по створенню системи вирішується за рахунок того, що реперні елементи, не менше трьох, які формують дані орієнтації j y = arctg 3 36943 вимірювання орієнтації рухомого об'єкта з використанням трьох реперних точок, які розміщуються на лобовій частині захисного шолома; на фіг. 3 – блок-схема реалізації пристрою; на фіг. 4 – варіант виконання кронштейна встановлення оптиколокаційного блока; на фіг. 5 – можлива імпульсна діаграма модуляції та селекції реперних випромінювачів. Система цілевказування, блок-схема якої наведена на фіг. 3, містить реперно-індикаторний блок 8, який розміщується на захисному шоломі 1 і має в своєму складі три реперних джерела випромінювання 2 та оптичний вузол 3, два оптикоелектронні локаційні вузли 4 та 5, які розміщуються на оптичній головці індикатора 9, а також блок синхронізації 6, блок формування сигналів цілевказування 7, блок корегуючих поправок 10 і блок корекції 11. Блок синхронізації 6 містить генератор модуляції 12, фазоімпульсний селектор 13. Блок корегуючих поправок 10 містить у своєму складі вузол введення корегуючих поправок 14, вузол збереження корегуючих поправок 15. Блок формування сигналів цілевказування 7 містить у своєму складі блок розрахунку координат реперних джерел 16 та блок розрахунку параметрів орієнтації рухомого об'єкта 17. У свою чергу, блок розрахунку координат реперних джерел 16 містить суматори 18, 19 і 20, вузол збереження констант параметрів встановлення 21, вузол збереження даних кутівпеленгів 22 (оперативний запам'я товуючий пристрій), вузол розрахунків координат реперних джерел 23. Виходи генератора модуляції 12 з'єднані з входами реперних джерел випромінювання 2 та фазоімпульсного селектора 13. Виходи оптико-локаційних вузлів 4 і 5 з'єднані через фазоімпульсний селектор 13 з першими входами суматорів 18 і 19 відповідно, другі входи яких з'єднані з виходом вузла збереження корегуючих поправок 15, вхід якого з'єднаний з виходом вузла введення корегуючи х поправок 14. Вихід вузла збереження констант параметрів встановлення 21 з'єднаний з входом суматора 20, другий вхід якого з'єднаний з виходом вузла збереження корегуючи х поправок 15. Виходи суматорів 18, 19 та 20 через вузол збереження даних кутів-пеленгів 22 з'єднані з входами вузла розрахунків координат реперних джерел 23, вихід якого через блок розрахунку параметрів орієнтації рухомого об'єкта 17 з'єднаний з входом блока корекції 11, вихід якого є виходом системи. Реперно-індикаторний блок 8 встановлюється на шолом 1 за допомогою кронштейна 24, який кріпиться до захисного шолома, а посадочне місце 25 для встановлення збірки виконується регульованим із забезпеченням переміщень в напрямках, які забезпечують суміщення зони виведення індикації з полем зору льотчика. Оптико-локаційні вузли 4 і 5 встановлюються на оптичній головці індикатора 9 за допомогою кронштейнів 26, на яких вузли кріплення 27 оптико-локаційних вузлів виконуються регульованими із забезпеченням розворотів вузлів 4 і 5 до заданого суміщення напрямку осей системи координат оптико-локаційного блока з напрямком оптичних осей оптичної головки. У ролі реперних джерел 2 можуть бути використані ІЧ випромінюючі діоди, які мають велику швидкодію, що дозволяє здійснити модуляцію їх випромінювання. Для розширення апертури випромінювання ІЧ випромінюючі діоди встановлюються в фокальній поверхні імерсійних лінз. Оптико-локаційні вузли 4 і 5 можуть бути виконані як з використанням координатно-чутливих фото приймальних вузлів, так і на основі оптичної схеми, яка формує вузьке миттєве поле зору дискретного фотоприймача, яким сканується простір можливих положень реперних джерел. Сканування здійснюється за рахунок розвороту дзеркальної призми. Вузол кріплення 27 кронштейна 26 встановлення оптико-локаційних вузлів 4 і 5 (фіг. 4) може бути виконаний з використанням опорної перехідної деталі 28, опорна поверхня яких виконана у вигляді напівсфери, яка спирається на напівсферичну виїмку в опорі 29. Ці обидві деталі мають наскрізний отвір, через який проходить установочний штир 30 корпусу оптико-локаційного вузла. Блоки синхронізації, формування сигналів цілевказування, корегуючих поправок та корекції можуть бути виконані з використанням стандартних засобів електронної та обчислювальної техніки. Імпульсна діаграма роботи системи, побудованої з використанням оптико-локаційних вузлів на основі скануючи дзеркальних призм, наведена на фіг. 5. За сигналами генератора 12 імпульси однієї тривалості та скважності (t=1 мкс, Q=9), але зсунуті один відносно одного по фазі на третину періоду, тобто на t=3 мкс, знаходять відповідний реперний випромінювач – імпульси РТ.1, РТ.2, РТ.3 із пакету (а). Оптико-локаційні вузли 4 і 5 сканують вузьким миттєвим полем зору з фотоприймача простір розміщення реперних випромінювачів 2. При суміщенні поля зору з реперним джерелом на виході оптико-локаційного вузла 4 з'являються імпульси. Результуючий сигнал СА складається з пачок імпульсів, які відповідають реперному випромінюванню всіх трьох джерел – пакет (b). Одночасно з імпульсами живлення реперних випромінювачів, генератор модуляції 12 формує відповідні їм імпульси тактування Т.1, Т.2, Т.3 пакету (c), які одночасно з імпульсами з виходу оптиколокаційного блока надходять на вхід фазоімпульсного селектора 13, в якому, використовуючи принцип збігання відповідних імпульсів, відбувається розподіл сигналів на три канали, тобто формуються імпульси пакету (d), в яких положення центрального імпульсу відносно початку сканування зони розміщення реперних джерел відповідає кутампеленгам на проекції реперних джерел 2 на площину XOZ. Ці сигнали надходять на вхід блока формування сигналів цілевказування 7, де використовуються як вихідні (початкові) дані для розрахунку параметрів орієнтації рухомого об'єкта (сигналів цілевказування). При встановленні оптико-локаційних вузлів 4 і 5 на борту літального апарату здійснюють суміщення орієнтації їх системи координат із системою координат літального апарату, в якій необхідно визначити кути орієнтації рухомого об'єкта (захис 4 36943 ного шолома льотчика). З метою спрощення операції юстирування системи для отримання даних орієнтації рухомого об'єкта із заданою точністю, виконують вимірювання невідповідності між установленими (фактичними) параметрами систем координат і прийнятими в схемі розрахунку (фіг. 2), а саме: різниці D Б між фактичною відстанню між оптико-локаційними вузлами та прийнятою відстанню Б між точками відліку кутів-пеленгів (точки О і О1 на фіг. 2); різниці D(a, b , q ) між реальними кутами розвороту оптико-локаційних вузлів відносно осей відлікової системи координат та прийнятими значеннями кутів у схемі розрахунку. Шляхом проведення ряду пробних вимірювань орієнтації рухомого об'єкта визначають похибку визначення параметрів орієнтації для конкретного встановлення системи. Отримані дані вводять і зберігають у блоці корегуючи х поправок 10, звідки вони надходять у блок формування сигналів цілевказування 7 і використовуються для компенсації невідповідності параметрів фактичної схеми вимірювання і схеми, прийнятої для розрахунку. Для введення даних використовується вузол введення 14. Для зберігання даних використовується вузол збереження 15, який може бути виконаний як у вигляді найпростішого набірного табло з тумблерами на кожний розряд числа значення розбіжності, так і електронного запам'ятовуючого пристрою з можливістю перезапису, типу Флеш-пам'ять, який зберігає дані і при відсутності живлення. Дані корегування кутів-пеленгів надходять на другий вхід суматорів 18 і 19, де кожна поправка складається з відповідним виміряним значенням кута-пеленгу на реперні точки 2. Дані корегування відстані між точками відліку кутів-пеленгів (відстані між оптико-локаційними вузлами) надходять на вхід суматора 20, на другий вхід якого надходить значення номінальної відстані між точками відліку кутів-пеленгів, яке надходить із вузла зберігання констант параметрів встановлення 21. Відкореговані значення кутів-пеленгів та відстані між оптико-локаційними вузлами зберігаються в оперативному запам'ятовуючому пристрої 22, звідки вони надходять у вузол розрахунку координат реперних випромінювачів 23. Далі розраховані значення координат реперних випромінювачів надходять у блок визначення параметрів орієнтації 17, з виходу якого сигнали орієнтації надходять на блок корегування 11, в якому частина похибки, не скомпенсована за рахунок корегування вихідних (початкових) даних (кутів-пеленгів, відстані між точками відліку і т.п.), додатково компенсується за допомогою баз даних, отриманих після ряду пробних вимірювань орієнтації рухомого об'єкта. Ці дані надходять з блока корегуючих поправок 10. Відкореговані сигнали цілевказування (дані орієнтації рухомого об'єкта) видаються споживачу. Таким чином, дане технічне рішення показує можливість створення пристрою визначення орієнтації рухомого об'єкта, в якому джерела зблоковані з оптичним індикатором і розміщуються на лобовій частині захисного шолома, а оптико-локаційний блок розташований перед льотчиком. Порівняно з прототипом, пристрій – нашоломна система цілевказування – має наступні переваги: вбудовану систему корегування як вихідних (початкових) параметрів визначення орієнтації захисного шолома, так і самих сигналів цілевказування; малогабаритний нашоломний вузол, який може встановлюватися на стандартний сучасний захисний шолом льотчика; встановлення оптиколокаційного блока на оптичну головку індикатора лобового скла літака (вертольота), що спрощує встановлення нашоломної системи цілевказування на літальний апарат. 5 36943 Фіг. 1 6 36943 Фіг. 2 7 36943 Фіг. 3 8 36943 Фіг. 4 9 36943 Фіг. 5 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 10
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for target designation
Автори англійськоюBorysiuk Anatolii Oleksiiovych
Назва патенту російськоюСистема целеуказания
Автори російськоюБорисюк Анатолий Алексеевич
МПК / Мітки
МПК: F41G 1/00, G01B 11/26
Мітки: цілевказування, система
Код посилання
<a href="https://ua.patents.su/10-36943-sistema-cilevkazuvannya.html" target="_blank" rel="follow" title="База патентів України">Система цілевказування</a>
Оптико-електронна система огляду та цілевказування
Номер патенту: 35913
Опубліковано: 17.02.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: F41G 3/22
Мітки: оптико-електронна, система, огляду, цілевказування
Формула / Реферат:
1. Оптико-електронна система огляду та цілевказування, яка містить прилад нічного бачення, до складу якого входять послідовно з'єднані об'єктив, блок перетворення вхідного зображення та блок візуалізації зображення, реперний вузол, виконаний у вигляді набору реперних елементів, а також пристрій дистанційного визначення орієнтації реперного вузла та блок формування кутів цілевказування, яка відрізняється тим, що реперний вузол конструктивно...
Нашоломна система цілевказування та індикації
Номер патенту: 50587
Опубліковано: 15.10.2002
Автори: Михайлик Олександр Костянтинович, Таранушко Георгій Іванович, Прибилов Георгій Якович, Кравченко Володимир Йосипович, Терещук Антоній Олексійович, Писарець Володимир Олексійович
МПК: G02B 23/02, G02B 27/30
Мітки: система, індикації, цілевказування, нашоломна
Формула / Реферат:
1. Нашоломна система цілевказування та індикації містить нашоломний візирний пристрій, оптико-електронні скануючі блоки та електронний блок, нашоломний візирний пристрій розташований на шоломі оператора, його вхід під'єднаний до виходу електронного блока, входи якого під'єднані до виходів скануючих блоків, розташованих таким чином, що випромінювачі, розташовані на шоломі оператора, знаходяться постійно в полі зору обох скануючих блоків, при...
Спосіб реалізації цілевказування
Номер патенту: 33686
Опубліковано: 15.02.2001
Автор: Борисюк Анатолій Олексійович
МПК: G05D 1/12, H04B 5/02, A62B 37/00
Мітки: спосіб, цілевказування, реалізації
Текст:
...дзеркало і т.п.), таким чином, щоб вісь конуса вхідної апертури цих агрегатів споживача була заздалегідь орієнтована вздовж лінії, що з'єднує ЗВС і РВП (тобто, вздовж "бази"); визначення поверхні, в якій виконують наведення апертури ЗВС шляхом її послідовних доворотів, може бути виконано у спеціалізованому обчислювальному пристрої [10], який розташований, наприклад, у споживача поряд із ЗВС і в якому реалізований алгоритм обчислювання...
Спосіб локації джерел випромінювання і пристрій для його реалізації
Номер патенту: 38212
Опубліковано: 17.03.2003
Автор: ГЛУЩЕНКО ВАЛЕРІЙ ТИМОФІЙОВИЧ
МПК: B25J 19/02, G01B 9/00
Мітки: джерел, пристрій, реалізації, випромінювання, локації, спосіб
Формула / Реферат:
1. Спосіб локації джерел випромінювання з застосуванням визначення кутів-пеленгів джерел випромінювання, з використанням оптичних елементів, який відрізняється тим, що визначають параметри зміщення потоку випромінювання джерел випромінювання при взаємодії з оптичними елементами, які потім використовують при визначенні координат джерел випромінювання.2. Спосіб за п. 1, який відрізняється тим, що визначення параметрів зміщення виконують...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович, Черняк Сергій Іванович
МПК: F41G 3/22
Мітки: реалізації, орієнтації, система, візира, осі, визначення, цілевказівки, спосіб, нашоломна
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Попередній патент: Пристрій та спосіб детектування зміни в діелектрокінетичних ефектах у навколишньому середовищі
Наступний патент: Спосіб одержання спученого графіту
Випадковий патент: Спосіб визначення можливого перебігу реактивного артриту у дітей