Спосіб локації джерел випромінювання і пристрій для його реалізації


Формула / Реферат
1. Спосіб локації джерел випромінювання з застосуванням визначення кутів-пеленгів джерел випромінювання, з використанням оптичних елементів, який відрізняється тим, що визначають параметри зміщення потоку випромінювання джерел випромінювання при взаємодії з оптичними елементами, які потім використовують при визначенні координат джерел випромінювання.
2. Спосіб за п. 1, який відрізняється тим, що визначення параметрів зміщення виконують з застосуванням попередньо виміряних кутів-пеленгів на джерела випромінювання.
3. Спосіб за п. 1, який відрізняється тим, що, визначивши параметри зміщення, використовують отримані значення для коригування кутів-пеленгів джерел випромінювання, з використанням яких визначають координати джерел випромінювання.
4. Пристрій дистанційного визначення координат джерел випромінювання, який має в своєму складі Μ оптико-локаційних блоків, де Μ ³ 1, блок визначення координат джерел випромінювання, який відрізняється тим, що він доповнений блоком визначення зміщення точок відліку кутів-пеленгів, який з'єднаний своїм входом з виходами оптико-локаційних блоків, а виходами - з другим входом блока визначення координат джерел випромінювання.
5. Пристрій за п. 4, який відрізняється тим, що блок визначення координат джерел випромінювання має в своєму складі вузол введення і зберігання даних координат місцеположення базових точок відліку кутів-пеленгів в системі координат оптико-локаційних блоків, суматор та вузол розрахунків координат джерел випромінювання, причому входи суматора з'єднані з виходами блока визначення зміщення точок відліку кутів-пеленгів та вузла вводу і зберігання даних про координати базових точок, а його вихід з'єднаний з входом вузла розрахунку координат джерел випромінювання.
Текст
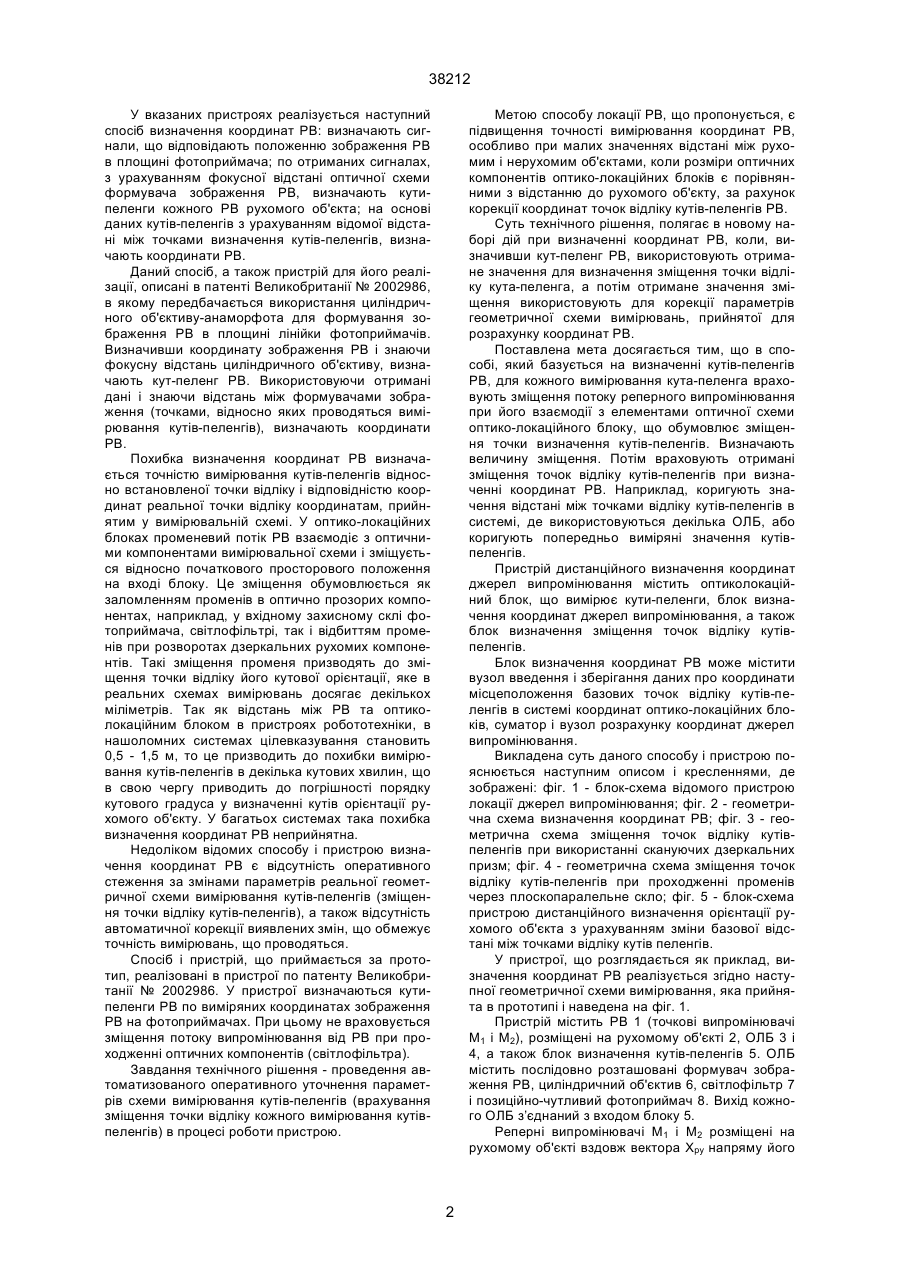
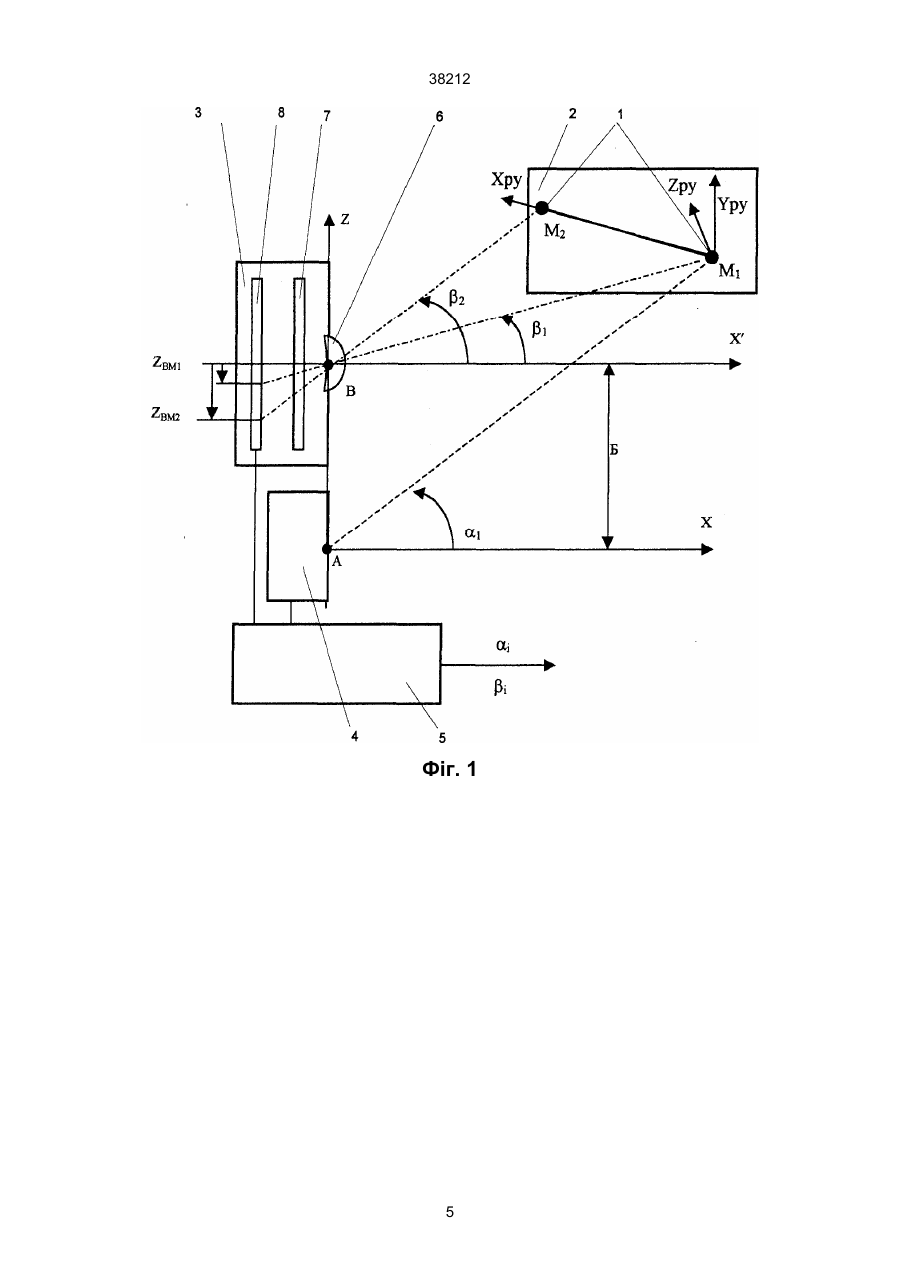
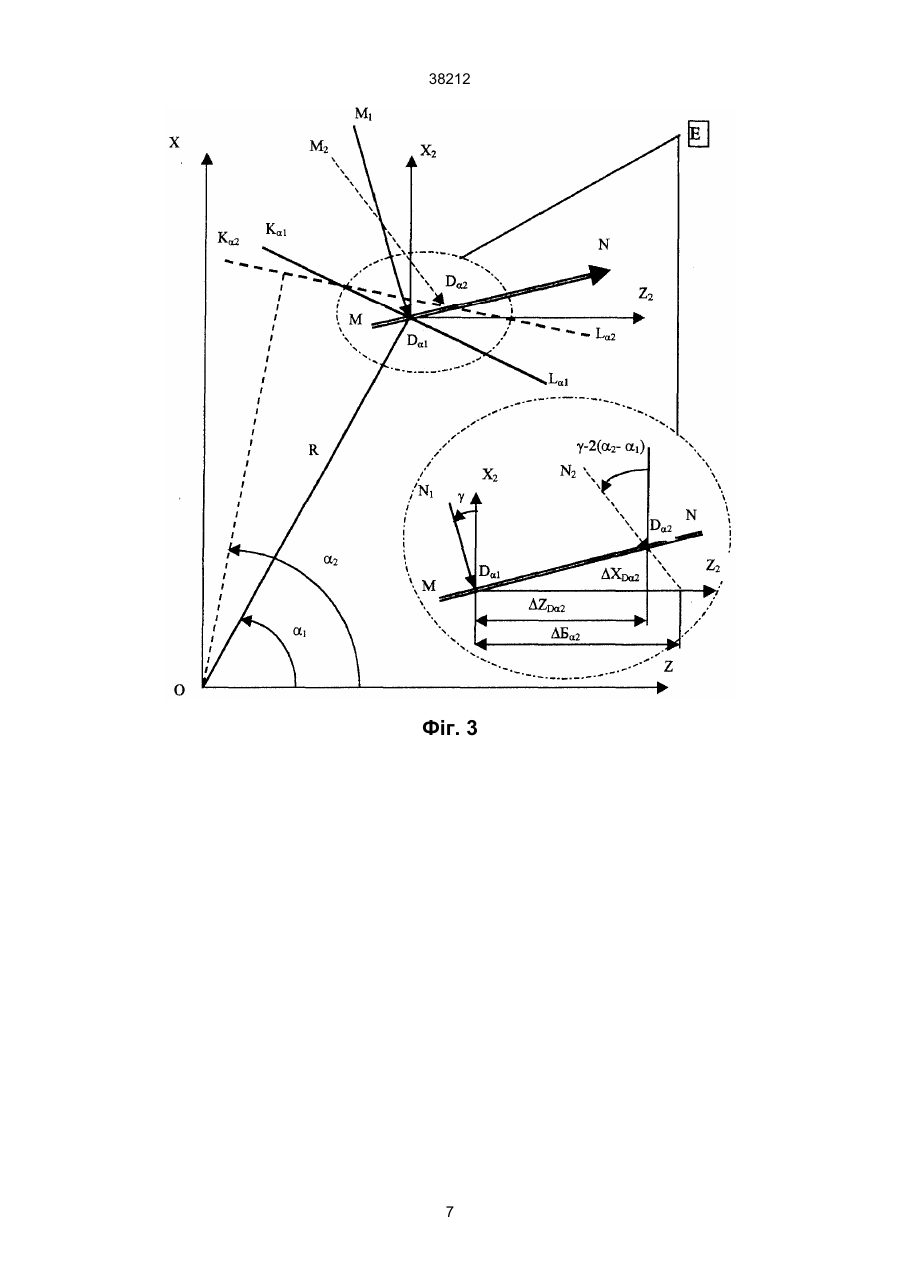
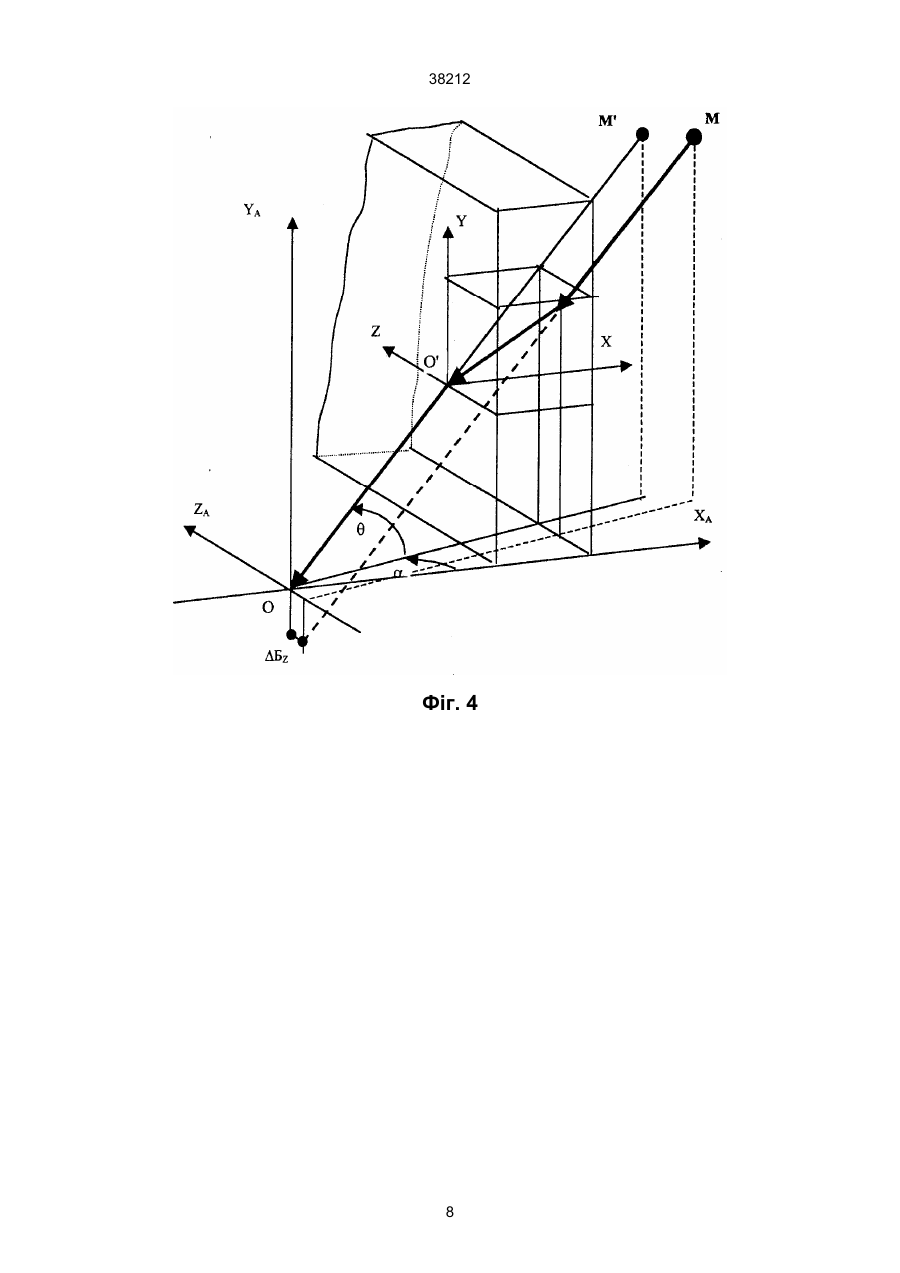
1. Спосіб локації джерел випромінювання з застосуванням визначення кутів-пеленгів джерел випромінювання, з використанням оптичних елементів, який відрізняється тим, що визначають параметри зміщення потоку випромінювання джерел випромінювання при взаємодії з оптичними елементами, які потім використовують при визначенні координат джерел випромінювання. 2. Спосіб по п. 1, який відрізняється тим, що визначення параметрів зміщення виконують з застосуванням попередньо виміряних кутів-пеленгів на джерела випромінювання. 3. Спосіб по п. 1, який відрізняється тим, що, визначивши параметри зміщення, використовують отримані значення для коригування кутів-пеленгів джерел випромінювання, з використанням яких визначають координати джерел випромінювання. A (54) СПОСІБ ЛОКАЦІЇ ДЖЕРЕЛ ВИПРОМІНЮВАННЯ І ПРИСТРІЙ ДЛЯ ЙОГО РЕАЛІЗАЦІЇ 38212 У вказаних пристроях реалізується наступний спосіб визначення координат РВ: визначають сигнали, що відповідають положенню зображення РВ в площині фотоприймача; по отриманих сигналах, з урахуванням фокусної відстані оптичної схеми формувача зображення РВ, визначають кутипеленги кожного РВ рухомого об'єкта; на основі даних кутів-пеленгів з урахуванням відомої відстані між точками визначення кутів-пеленгів, визначають координати РВ. Даний спосіб, а також пристрій для його реалізації, описані в патенті Великобританії № 2002986, в якому передбачається використання циліндричного об'єктиву-анаморфота для формування зображення РВ в площині лінійки фотоприймачів. Визначивши координату зображення РВ і знаючи фокусну відстань циліндричного об'єктиву, визначають кут-пеленг РВ. Використовуючи отримані дані і знаючи відстань між формувачами зображення (точками, відносно яких проводяться вимірювання кутів-пеленгів), визначають координати РВ. Похибка визначення координат РВ визначається точністю вимірювання кутів-пеленгів відносно встановленої точки відліку і відповідністю координат реальної точки відліку координатам, прийнятим у вимірювальній схемі. У оптико-локаційних блоках променевий потік РВ взаємодіє з оптичними компонентами вимірювальної схеми і зміщується відносно початкового просторового положення на вході блоку. Це зміщення обумовлюється як заломленням променів в оптично прозорих компонентах, наприклад, у вхідному захисному склі фотоприймача, світлофільтрі, так і відбиттям променів при розворотах дзеркальних рухомих компонентів. Такі зміщення променя призводять до зміщення точки відліку його кутової орієнтації, яке в реальних схемах вимірювань досягає декількох міліметрів. Так як відстань між РВ та оптиколокаційним блоком в пристроях робототехніки, в нашоломних системах цілевказування становить 0,5 - 1,5 м, то це призводить до похибки вимірювання кутів-пеленгів в декілька кутових хвилин, що в свою чергу приводить до погрішності порядку кутового градуса у визначенні кутів орієнтації рухомого об'єкту. У багатьох системах така похибка визначення координат РВ неприйнятна. Недоліком відомих способу і пристрою визначення координат РВ є відсутність оперативного стеження за змінами параметрів реальної геометричної схеми вимірювання кутів-пеленгів (зміщення точки відліку кутів-пеленгів), а також відсутність автоматичної корекції виявлених змін, що обмежує точність вимірювань, що проводяться. Спосіб і пристрій, що приймається за прототип, реалізовані в пристрої по патенту Великобританії № 2002986. У пристрої визначаються кутипеленги РВ по виміряних координатах зображення РВ на фотоприймачах. При цьому не враховується зміщення потоку випромінювання від РВ при проходженні оптичних компонентів (світлофільтра). Завдання технічного рішення - проведення автоматизованого оперативного уточнення параметрів схеми вимірювання кутів-пеленгів (врахування зміщення точки відліку кожного вимірювання кутівпеленгів) в процесі роботи пристрою. Метою способу локації РВ, що пропонується, є підвищення точності вимірювання координат РВ, особливо при малих значеннях відстані між рухомим і нерухомим об'єктами, коли розміри оптичних компонентів оптико-локаційних блоків є порівнянними з відстанню до рухомого об'єкту, за рахунок корекції координат точок відліку кутів-пеленгів РВ. Суть технічного рішення, полягає в новому наборі дій при визначенні координат РВ, коли, визначивши кут-пеленг РВ, використовують отримане значення для визначення зміщення точки відліку кута-пеленга, а потім отримане значення зміщення використовують для корекції параметрів геометричної схеми вимірювань, прийнятої для розрахунку координат РВ. Поставлена мета досягається тим, що в способі, який базується на визначенні кутів-пеленгів РВ, для кожного вимірювання кута-пеленга враховують зміщення потоку реперного випромінювання при його взаємодії з елементами оптичної схеми оптико-локаційного блоку, що обумовлює зміщення точки визначення кутів-пеленгів. Визначають величину зміщення. Потім враховують отримані зміщення точок відліку кутів-пеленгів при визначенні координат РВ. Наприклад, коригують значення відстані між точками відліку кутів-пеленгів в системі, де використовуються декілька ОЛБ, або коригують попередньо виміряні значення кутівпеленгів. Пристрій дистанційного визначення координат джерел випромінювання містить оптиколокаційний блок, що вимірює кути-пеленги, блок визначення координат джерел випромінювання, а також блок визначення зміщення точок відліку кутівпеленгів. Блок визначення координат РВ може містити вузол введення і зберігання даних про координати місцеположення базових точок відліку кутів-пеленгів в системі координат оптико-локаційних блоків, суматор і вузол розрахунку координат джерел випромінювання. Викладена суть даного способу і пристрою пояснюється наступним описом і кресленнями, де зображені: фіг. 1 - блок-схема відомого пристрою локації джерел випромінювання; фіг. 2 - геометрична схема визначення координат РВ; фіг. 3 - геометрична схема зміщення точок відліку кутівпеленгів при використанні скануючих дзеркальних призм; фіг. 4 - геометрична схема зміщення точок відліку кутів-пеленгів при проходженні променів через плоскопаралельне скло; фіг. 5 - блок-схема пристрою дистанційного визначення орієнтації рухомого об'єкта з урахуванням зміни базової відстані між точками відліку кутів пеленгів. У пристрої, що розглядається як приклад, визначення координат РВ реалізується згідно наступної геометричної схеми вимірювання, яка прийнята в прототипі і наведена на фіг. 1. Пристрій містить РВ 1 (точкові випромінювачі М1 і М2), розміщені на рухомому об'єкті 2, ОЛБ 3 і 4, а також блок визначення кутів-пеленгів 5. ОЛБ містить послідовно розташовані формувач зображення РВ, циліндричний об'єктив 6, світлофільтр 7 і позиційно-чутливий фотоприймач 8. Вихід кожного ОЛБ з’єднаний з входом блоку 5. Реперні випромінювачі М1 і M2 розміщені на рухомому об'єкті вздовж вектора Хру напряму його 2 38212 PD, положення якої визначається умовою перетину радіуса призми R і прямої MN під кутом x=45°. Скануючі ОЛБ розташовані в пеленгаційній системі координат XOZ таким чином, щоб напрям прямої PD, що характеризується кутом g відносно осі ОХ, забезпечував наявність спільної зони сканування обох ОЛБ в області найбільш вірогідного положення РВ Мі. Скануючі ОЛБ визначають кути-пеленги РВ Мі відносно точки відліку, за яку приймається точка D перетину дзеркальної грані KL і оптичної осі об'єктиву MN. За номінальну базову відстань приймається відстань між точками D і D', які відповідають початковим кутам a0 і b 0, причому пряма DD' розташовується паралельно осі пеленгації OZ на відстані Хn. Зміни розміру і кутового положення відрізка DD', що відбуваються в процесі сканування (при розворотах призми відносно об'єктиву), призводять до похибки визначення координат об'єкта. Розглянемо зміни параметрів відрізка DD', проводячи аналіз зміни координат точки D відліку кутів пеленгу при розворотах призми відносно об'єктиву в скануючому ОЛБ А (фіг. 3). Процес зміни координат точки відліку в ОЛБ В аналогічний. Рівняння прямих KL, MN можуть бути записані в наступному вигляді: орієнтації. На нерухомому блоці встановлюються вздовж осі OZ (точки А і В) два оптико-локаційні блоки, які вимірюють кути-пеленги проекцій реперних випромінювачів на площину XOZ. Вимірювання орієнтації рухомого об'єкта виконується в два етапи: - визначення кутів-пеленгів координат РВ (точок) М1 і М2, а потім, використовуючи отримані значення координат точок, визначення орієнтації рухомого об'єкта. При проведенні локації РВ визначаються координати зображення РВ на фотоприймачі 8, це Zвм1 і Zвм2. Використовуючи отримані значення, а також фокусну відстань f об'єктиву 6, визначаються кути пеленги РВ М1 і M2: b i = arctg Z BM i f (1), де: i=1,2. Аналогічно визначаються кути aі в оптиколокаційному блоці 4. Визначення координат точок М1 і M2 проводиться з використанням наступної функціональної залежності: Z Mi = X Mi = Бi ctga i - ctgb i Бi × ctga i ctga i - ctgb i (2), z × ctga + x - R (3). z × tgg - x + R Точність визначення координат РВ М1 і М2, визначається точністю вимірювання кутів-пеленгів ai, bi, а також базової відстані Бі між оптико-локаційними блоками, тобто між точками вимірювання кутів-пеленгів в кожному оптико-локаційному блоці. Цю відстань можна записати в наступному вигляді: Бi = Б0 + DБaі + DБbі (4), де: Б0 - номінальне значення базової відстані при кутах a0 і b0; DБai і DБbі - змінна частина базової відстані в блоках А і В. Зміщення точок відліку на величини DБai і DБbі зумовлені впливом оптичних компонентів на проходження променів реперного випромінювання в оптико-локаційних блоках. Оптико-електронні блоки звичайно виконуються або на основі дискретних фотодетекторів і скануючих дзеркал, або з використанням координатно-чутливих фотоприймачів. У всіх випадках перед фотоприймачами встановлені оптичні компоненти, які зміщують промені реперного випромінювання. Для оцінки зміни координат точок відліку кутівпеленгів, а значить і розрахункової базової відстані в скануючих системах з дзеркальними призмами, що обертаються, проведемо аналіз оптичної схеми скануючої системи, наведеної на фіг. 2, яка призначена для визначення координат проекцій точок Мі на пеленгаційну площину XOZ відлікової системи координат. Схема вимірювання включає два скануючих ОЛБ А і В, кожний з яких містить дзеркальну призму з радіусом вписаного кола R та гранню KL і об'єктив, оптична вісь якого позначена MN. Центр зони сканування кожного ОЛБ задається прямою 1 = 0; sin a (5) sin(a0 -g ) = 0. sin(90o + g ) Розв'язавши спільно рівняння відносно координат ZD, XD точки D, отримаємо співвідношення для координат точки D: ZD = R cosg - sin a × sin(a 0 - g ) × ; cosg cosa + sin a × tgg (6) R sin g - sin a × sin(a 0 - g ) XD = × . cosg cosa + sin a × tgg Відповідно до отриманого співвідношення, значення ZD, XD мінімальне в точці Da1, яка відповідає куту a1. При розвороті призми на кут a2 відбувається зміщення точки відліку кута-пеленга в нове положення (точка Da2 з приростом координат DZDa2, DХDa2, тобто базова відстань збільшується на величину DБa2 (зона Е, фіг. 3). Зміну точки відліку в оптико-локаційних блоках з координатно-чутливими фотоприймачами можна оцінити при аналізі проходження променів потоку випромінювання крізь захисне скло фотоприймача. Наявність плоскопаралельного захисного скла (світлофільтра) приводить до додаткового зміщення точки падіння променя випромінювання на площину фотоприймача відносно розрахункового положення точки відліку кутів-пеленгів (фіг. 4). Зміщення точки відліку визначається співвідношенням: 3 38212 DБ z = d × sin a i ( cosq i 1 ) (7) 2 cosa i (n' / n) + cos 2 q i - cos2 a i - 1 випромінювання, а оптико-локаційний блок 3 формує кути bі Кути-пеленги надходять на вхід блоку 5, в якому записуються в оперативний запам'ятовуючий пристрій 12, в якому зберігаються весь період наступного циклу визначення кутів-пеленгів. Одночасно, значення кутів-пеленгів aі і bі надходять на вхід блоку 9 формування величини зміщення, в якому формується величина зміщення точки відліку кожного виміряного кута, тобто формуються сигнали DБ(aі), DБ(bі). Сигнали, відповідні наборам вимірювань на даний РВ, тобто значення DБ(aі), DБ(bі) на РВ М1, М2, М3 з виходу блоку 9 надходять на суматор 11, куди також надходить значення постійної частини базової відстані DБ0 з блоку 10 введення і зберігання даних відстані між оптико-локаційними блоками. З виходу блоку 10 сигнали, що відповідають точній відстані між точками відліку кутів-пеленгів, поступають в оперативний запам'ятовуючий пристрій 12. Після завершення циклу визначення кутів-пеленгів проводиться визначення координат реперних джерел випромінювання Mі, використовуючи відповідні їм кути-пеленги. Сигнали базової відстані Б при вимірюванні кутів-пеленгів для кожної точки Mі одночасно зі значеннями відповідних кутів пеленгів aі і b і з виходу оперативного запам'ятовуючого пристрою 12 надходять на вхід блоку 13 визначення координат реперних випромінювачів. З виходу блоку 13 дані про просторові координати реперних випромінювачів Мі (X, Y, Z) поступають на вхід блоку 14 визначення кутів орієнтації рухомого об'єкта. У блоці 14, використовуючи дані про просторові координати РВ Мі, а також, враховуючи дані їх взаємного розташування на об'єкті, проводиться визначення параметрів орієнтації рухомого об'єкта - кутів jy, jz вектора орієнтації захисного шолома. У порівнянні з прототипом спосіб і пристрій, мають наступну перевагу: здійснюється автоматичне врахування зміщення точок відліку кутівпеленгів, що забезпечує підвищену точність визначення координат джерел випромінювання і, як наслідок, параметрів орієнтації рухомого об'єкта. де: d - товщина скла; n, n' - показники заломлення повітря і скла пластини; ai, qi - кути азимута і місця реперного випромінювача. Як приклад реалізації способу визначення положення РВ, що пропонується, розглянемо блоксхему пристрою визначення координат РВ, встановлених на рухомому об'єкті (захисному шоломі), в якому забезпечено автоматичне урахування зміни відстані між точками відліку кутів-пеленгів в оптико-локаційних блоках, наведену на фіг. 5. Пристрій містить РВ 1 (точкові випромінювачі Мі, М2 і М3), які розміщені на рухомому об'єкті (захисному шоломі) 2, ОЛБ 3 і 4, а також блок визначення кутів-пеленгів 5. ОЛБ містить послідовно розташовані формувач зображення РВ - циліндричний об'єктив 6, світлофільтр 7 і позиційночутливий фотоприймач 8, блок 9 формування величини зміщення точок відліку кутів-пеленгів, вузол 10 введення і зберігання даних відстані між оптико-локаційними блоками 3 і 4, суматор 11, оперативний запам'ятовуючий пристрій 12, блок 13 визначення орієнтації рухомого захисного шолома 2. Дані про відстань між оптико-локаційними блоками, які визначаються компоновкою пристрою, заздалегідь вводяться у вузол 10, де і зберігаються на весь період роботи пристрою. Вузол 10 введення і зберігання може бути виконаний у вигляді набору перемикачів, що формують відповідний двійковий код, або у вигляді мікросхеми перепрограмовуваної пам'яті. В оптико-локаційних блоках, при використанні багатоелементних позиційно-чутливих фотоприймачів, здійснюється визначення координат зображення РВ на фотоприймачі, а потім і значення кутів-пеленгів РВ. При використанні оптико-локаційних блоків, в яких сканування простору знаходження реперних випромінювачів проводиться з використанням фотоприймача з вузьким полем зору і скануючих дзеркальних призм, також отримують сигнали кутів-пеленгів РВ. Оптико-локаційний блок 4 формує кути aі де і - номер джерела 4 38212 Фіг. 1 5 38212 Фіг. 2 6 38212 Фіг. 3 7 38212 Фіг. 4 8 38212 Фіг. 5 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 9
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for location of radiation source
Назва патенту російськоюСпособ локации источников излучения и устройство для его реализации
МПК / Мітки
МПК: G01B 9/00, B25J 19/02
Мітки: пристрій, спосіб, локації, джерел, випромінювання, реалізації
Код посилання
<a href="https://ua.patents.su/9-38212-sposib-lokaci-dzherel-viprominyuvannya-i-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб локації джерел випромінювання і пристрій для його реалізації</a>
Спосіб просторової локації джерел дефектів, що розвиваються
Номер патенту: 36499
Опубліковано: 16.04.2001
Автори: Бабак Віталій Павлович, Філоненко Сергій Федорович
МПК: G01N 29/06, G01N 27/06
Мітки: розвиваються, спосіб, локації, джерел, дефектів, просторової
Текст:
...давачів: h, 1 - висота та довжина об'єкту контролю; Л, Л' - лінії напрямів на джерело випромінювання для першого та другого квадратів. Розрахунки показали, що похибка визначення місця знаходження джерела випромінювання не перевищує 7%. c2 t t +t t t 31 21 23 41 43 ; 4B t 32 - t 41 (1) X2 = c t (t + t ) - 2t 21t 41 t 42 31 23 41 4B t 34 - t 21 2 де c - швидкість звуку в матеріалі; B - базовий розмір антени (фіг. 1); t 21 , t 23 … - РЧП...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52633
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: координат, джерел, випромінювання, пасивна, вимірювання, станція
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднані відповідно з входом БОППГ і входом БОПОГ, вихід останнього є першим виходом станції, яка відрізняється тим, що у неї додатково введені блок визначення швидкості зміни...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 37949
Опубліковано: 15.05.2001
Автор: Черниш Станіслав Костянтинович
Мітки: джерел, станція, координат, вимірювання, пасивна, випромінювання
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання містить в собі пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ), блок обробки пеленгів оберненого галсу (БОПОГ), блок визначення швидкості зміни пеленга (БВШЗП) і блок визначення дальності, які розміщені на рухомому носієві, перший і другий вихід пеленгаторної станції з'єднаний з входами БОППГ і БОПОГ, перший вихід якого е першим виходом пасивної станції, перший...
Пасивна станція вимірювання координат джерел випромінювання
Номер патенту: 52649
Опубліковано: 15.01.2003
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: пасивна, станція, джерел, випромінювання, вимірювання, координат
Формула / Реферат:
Пасивна станція вимірювання координат джерел випромінювання, що містить пеленгаторну станцію, блок обробки пеленгів прямого галсу (БОППГ) і блок обробки пеленгів оберненого галсу (БОПОГ), які розміщені на рухомому носієві, перший вихід пеленгаторної станції з'єднаний з входом БОППГ, яка відрізняється тим, що в неї додатково введені блок визначення швидкості зміни пеленга (БВШЗП), блок визначення дальності, схема порівняння, оперативний...
Пасивна система вимірювання координат джерел випромінювання
Номер патенту: 43433
Опубліковано: 17.12.2001
Автор: Черниш Станіслав Костянтинович
МПК: G01S 5/06
Мітки: джерел, вимірювання, випромінювання, система, координат, пасивна
Формула / Реферат:
Пасивна система вимірювання координат джерел випромінювання, що містить в собі декілька, як мінімум дві, просторово рознесені пеленгаторні станції і центральний пост, з'єднані двостороннім зв'язком з каналом зв'язку, вихід центрального поста є виходом системи, яка відрізняється тим, що в неї введені додатково на кожну пеленгаторну станцію лічильник, накопичуючий суматор, подільник, дешифратор, постійний запам'ятовуючий пристрій (ПЗП), схема...
Попередній патент: Завантажувальний пристрій для закритих, сполучених з установкою відведення газів шахтних печей
Наступний патент: Спосіб і пристрій для регулювання потужності у прямому інформаційному каналі і система зв’язку, де вони використовуються
Випадковий патент: Спосіб попередження гепатотоксичної дії парацетамолу