Спосіб юстирування нашоломної системи візування

Формула / Реферат
Спосіб юстирування нашоломної системи візування, яка включає візир, вимірювачі кутової швидкості розвороту голови оператора, установлені на шоломі, що полягає в орієнтації перехрестя візира в нульове положення відносно базової системи координат візира і в жорсткому закріпленні вимірювачів на шоломі оператора, який відрізняється тим, що вводять у поле зору оператора мітки стабілізації горизонтальної площини базової системи координат візира відносно горизонтальної площини Землі, фіксують положення горизонтальної площини базової системи координат візира, а потім вводять у поле зору оператора растр з мітками заданого розвороту голови оператора і, після кожного розвороту при суміщенні перехрестя візира з заданою міткою, реєструють n значень вихідних кутів візирної системи, порівнюють їх з апріорною інформацією, а потім розвертають послідовно кожний вимірювач відносно базової системи координат візира у напрямку і на величину, однозначно визначену вимірюваним розузгодженням між вихідною і апріорною інформацією.
Текст
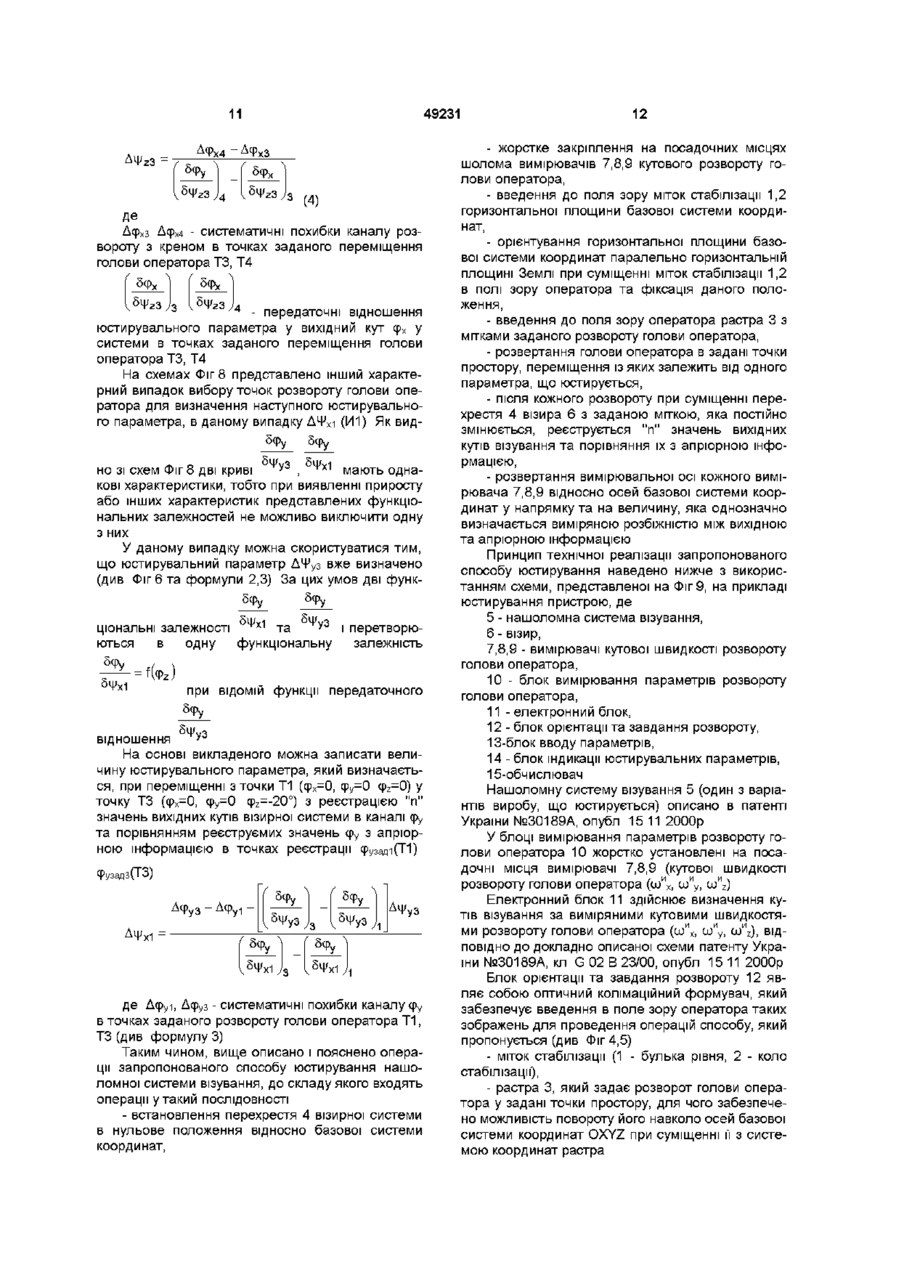
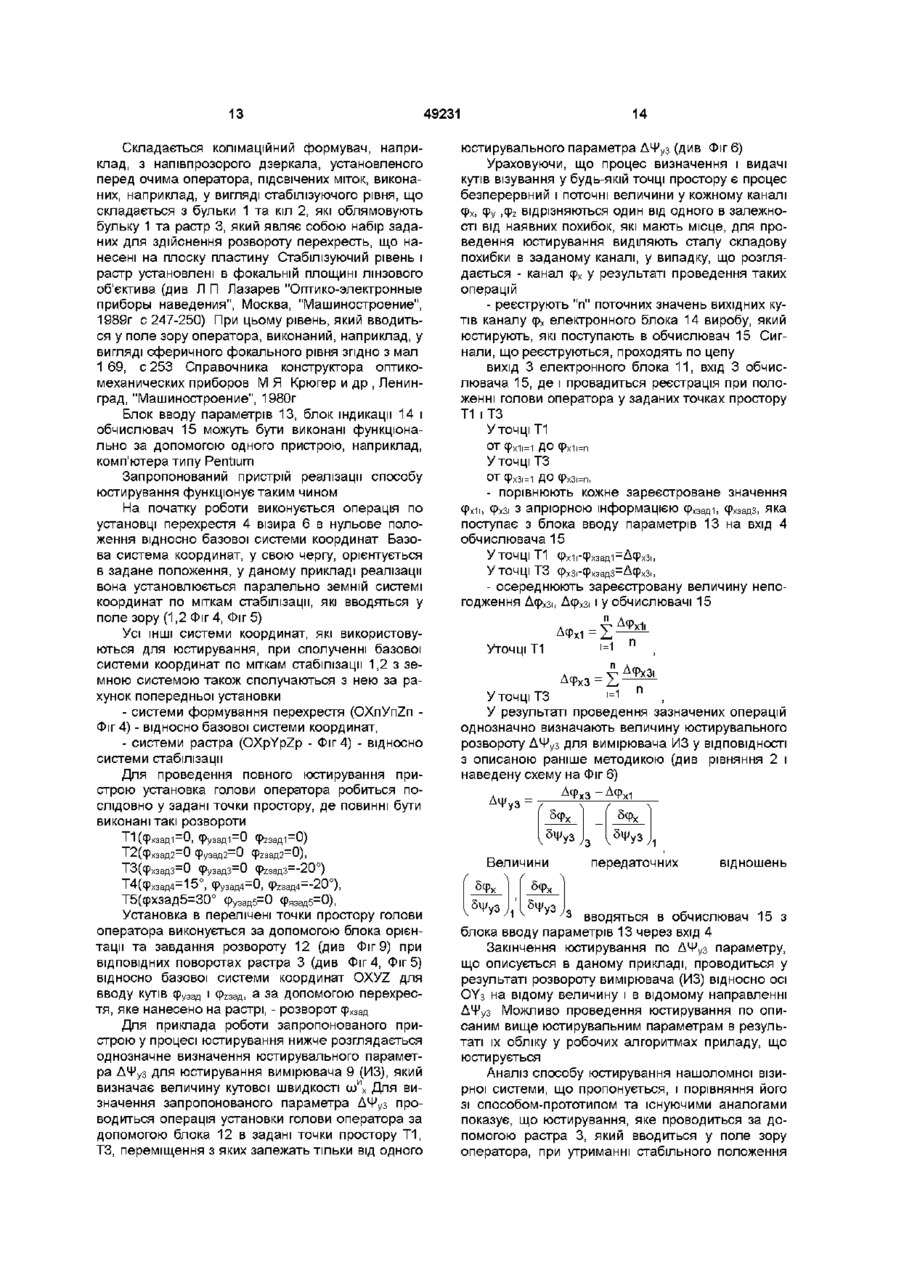
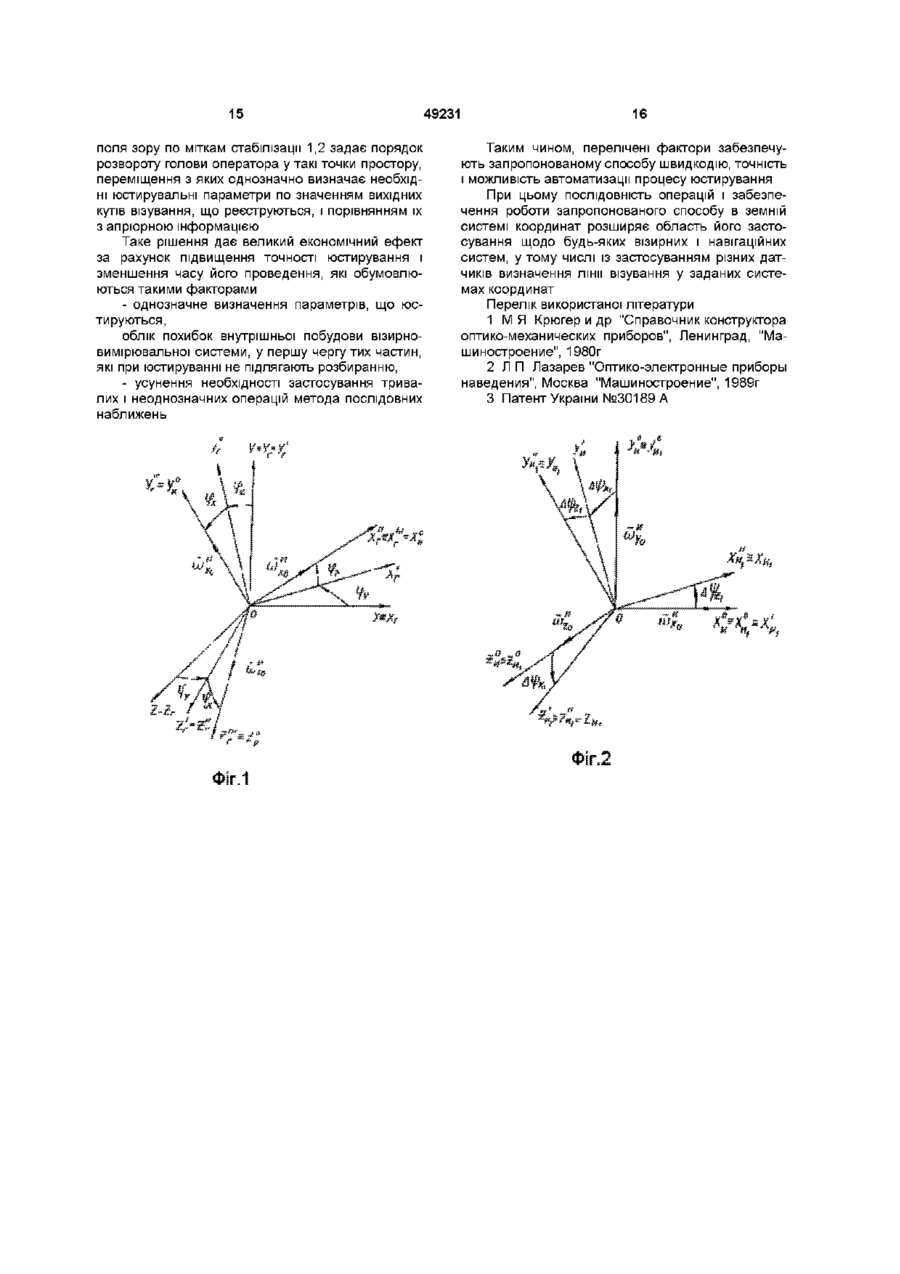
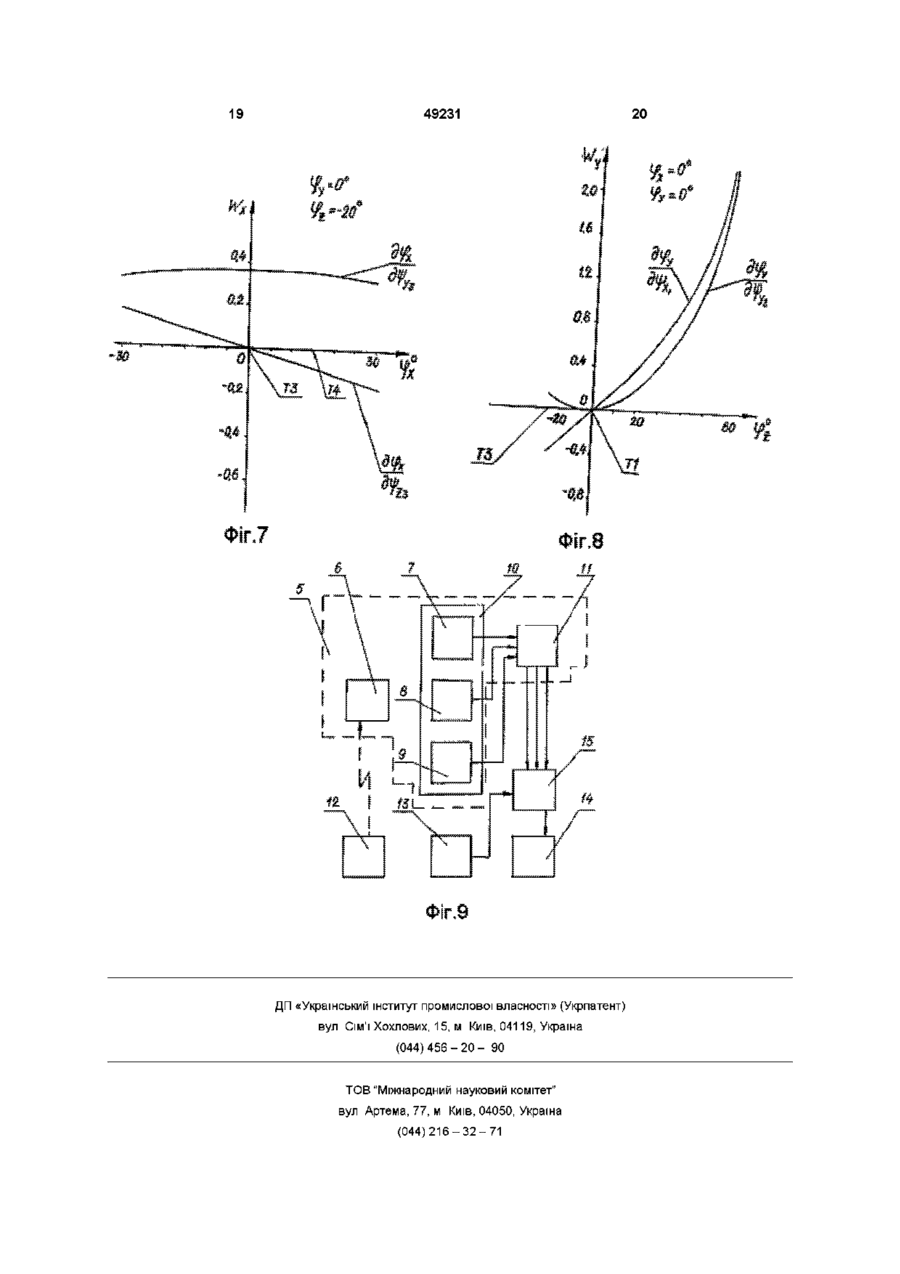
Спосіб юстирування нашоломної системи візування, яка включає візир, вимірювачі кутової швидкості розвороту голови оператора, установлені на шоломі, суть якого полягає в орієнтації перехрестя візира в нульове положення відносно базової системи координат візира і в жорсткому закріпленні вимірювачів на шоломі оператора, який відрізняється тим, що вводять у поле зору оператора мітки стабілізації горизонтальної площини базової системи координат візира відносно горизонтальної площини Землі, фіксують положення горизонтальної площини базової системи координат візира, а потім вводять у поле зору оператора растр з мітками заданого розвороту голови оператора і після кожного розвороту при суміщенні перехрестя візира з заданою міткою реєструють "п" значень вихідних кутів візирної системи, порівнюють їх з апріорною інформацією, а потім розвертають послідовно кожний вимірювач відносно базової системи координат візира у напрямку і на величину, однозначно визначену вимірюваним непогодженням між вихідною і апріорною інформацією Технічне рішення, що пропонується, відноситься до галузі оптико-електронного приладобудування, зокрема, до нашоломних систем візування і може бути застосовано при їх розробці та юстируванню в різних галузях техніки Предметом розгляду у даному технічному рішенні є нашоломна візирна система суміщеного типу, в якій вимірювальні блоки суміщені з блоками візування і установлені безпосередньо на шоломі оператора для вимірювання його розвороту В даному випадку розглядається питання використання як вимірювачів різного типу гіроскопічних систем, призначених для вимірювання як кутових відхилень візирної системи, так і швидкості її розвороту Однак застосування запропонованого способу не обмежується типом вимірювачів і вибором рухомої основи, яка змінює своє положення у просторі, і може бути поширене на юстирування подібних структурних схем побудови приладів На даний час відомо структурні схеми побудови нашоломних візирних систем, які складаються з вимірювачів швидкості розвороту голови оператора, певним чином орієнтованих відносно осі візира (лінії візування оператора), установлених разом на рухомій основі, в даному випадку на шоломі оператора і обчислювача Докладно склад відомих пристроїв та принцип їх дії описано у таких роботах - патенти України №30191 А, 30200А, 30190А, 30189А, кл G 02 В 23/00, опубл 15 11 2000г Великобританія патент № GB 2 143 948A Аналіз відомих структурних схем побудови нашоломних візирних систем суміщеного типу показує, що в усіх пристроях вимірювачі установлені жорстко на шоломі і осі їх певним чином суміщені з осями візира та базовою системою координат При цьому необхідно зауважити, що у всіх аналогів відхилення вимірювачів і візира відбуваються відносно осей розвороту голови оператора, а видача кутів візування - відносно системи відліку споживача, тобто заданої базової системи координат Таким чином, досягти високої точності визначення кутів візування у такого типу структурних схемах побудови можна тільки при вирішенні таких питань - виставленням систем відліку вимірювачів і візира відносно осей розвороту голови оператора та між собою, - виставленням вимірювально-візирної системи відносно базової системи координат Існуючі способи юстирування аналогів містять в собі проведення операції по вирішенню перерахованих вище питань виставлення вимірювальних блоків і візира методом послідовних наближень (21)2001086014 CO сч 49231 контролем вихідних кутів візування в граничних точках діапазону їх вимірювання При цьому, враховуючи той факт, що установлення візирно-вимірювальних блоків на шоломі оператора обмежено габаритами та вагою елементів, які встановлюються, весь процес юстирування по вставленню вимірювачів розвороту голови оператора ведеться за допомогою підшабрування, застосування спеціальних прокладок для заданої орієнтації, що значно збільшує час юстирування її знижує точність виставлення блоків відносно базової системи координат Таким чином, недоліки юстирування аналогів способу, що пропонується, такі - тривалість процесу юстирування, - низька точність юстирування за рахунок неурахування внутрішніх елементів схем, що юстируються , наприклад, установлення чутливих осей вимірювання кутового відхилення відносно корпуса, за допомогою якого відбувається юстирування вимірювальної системи Найбільш близьким за своєю технічною суттю і задачам, які вирішуються, є спосіб юстирування, який закладено в пристрій визначення орієнтації осі візира (патент України №30189А Мклб G 02 В 23/00 надр 15 11 2000р ) ВІДПОВІДНО ДО ЦЬОГО способу відбувається ку тове юстирування вимірювачів шляхом установлення їх на єдиному кронштейні з подальшим закріпленням його на шоломі оператора Ця частина юстирувального процесу приводить до точного виставлення осей корпуса вимірювачів одна відносно іншої за рахунок посадочних місць єдиного кронштейна При цьому допускається деяке зміщення і розворот вимірювачів один відносно другого шляхом підшабрення та установки прокладок для досягнення мінімальних похибок на виході візирної системи з наступним жорстким закріпленням вимірювачів Друга частина юстирувального процесу, а саме - установлення вимірювачів відносно базової системи координат - досягається в результаті подвійного юстирування - орієнтація корпусу єдиного кронштейна відносно нульової позначки єдиної системи, - спільне установлення візирно-вимірювальної системи відносно осей базової системи координат по ЗОВНІШНІМ тестам за рахунок регулювальних елементів, установлених на шоломі При цьому слід ВІДМІТИТИ, що описаний процес юстирування проводиться відносно корпусних деталей вимірювачів і не враховує складного внутрішнього взаємного розташування чутливих осей вимірювачів Враховуючи вищевикладене можна ВІДМІТИТИ такі суттєві недоліки способу-прототипу -тривалість процесу юстирування обумовлена застосуванням критеріїв послідовного приближения вихідних результатів системи до заданої точності визначення кутових координат об'єктів, що візуються, - обмежена величина досягаємих результатів характеристик, пов'язаних з точністю, у зв'язку з неможливістю урахування при юстируванні внутрішніх величин взаємної орієнтації чутливих осей вимірювачів розворотів, - контрольні точки юстирувального процесу функціонально не пов'язані з критеріями проведення даного процесу Перед автором постала задача розробити спосіб юстирування нашоломної системи візування, яка могла б швидко діяти і точно юстирувати чутливі осі вимірювачів розворотів голови оператора відносно базової системи координат при жорсткому закріпленні вимірювачів на посадочні місця візирно-вимірювального блока Вирішення поставленої задачі досягається тим, що у відомому способі юстирування нашоломної системи візування, до складу якої входять візир, вимірювачі кутової швидкості розвороту голови оператора, встановлені на шоломі, який міститься в орієнтації перехрестя , в основі якого лежить орієнтація перехрестя візира в нульове положення відносно базової системи координат візира та в жорсткому закріпленні вимірювачів на шоломі оператора, вводять в поле зору оператора мітки стабілізації горизонтальної площини базової системи координат візира відносно горизонтальної площини Землі, фіксують положення горизонтальної площини базової системи координат візира, а потім вводять в поле зору оператора растр з мітками заданого розвороту голови оператора і після кожного розвороту при суміщенні перехрестя візира з заданою міткою реєструють "п" значень вихідних кутів візирної системи, порівнюють їх з апріорною інформацією, а потім розвертають послідовно кожний вимірювач відносно базової системи координат візира в напрямку і на величину, однозначно визначену виміряним непогодженням між вихідною та апріорною інформацією Суть винаходу, що заявляється, в тому, що в полі зору оператора вводять мітки стабілізації для суміщення візирно-вимірювальної системи з базовою системою координат і зображення растра для послідовного розвороту голови оператора у такі точки простору, переміщення із яких функціонально залежить тільки від одного юстирувального параметра, який однозначно визначається за різницею реєструємих значень вихідних кутів в даних точках і апріорною інформацією на відміну від способу-прототипу, юстирування при проведенні якого відбувається за усіма параметрами, які юстируються, методом послідовних приближень без урахування внутрішньої орієнтації чутливих осей відносно корпусів вимірювачів Аналіз запропонованого способу і способу-прототипу при зіставленні показує, що юстирування відбувається за допомогою растра, який вводиться до поля зору, задає порядок розвороту голови оператора у такі точки простору, переміщення з яких однозначно визначає необхідні юстирувальні переміщення візирновимірювальної системи за реєструємими значеннями вихідних кутів у цих точках і порівнянню їх з апріорною інформацією, яка дає можливість урахувати не тільки зовнішнє розташування вузлів, які юстируються, а і урахувати при цьому похибки внутрішніх структур візира та вимірювачів Таке рішення дає великий економічний ефект за рахунок значного підвищення точності юстирування та зменшення часу його проведення, що обумовлено такими факторами 49231 - однозначне визначення переміщень, що юстируються, - облік похибок внутрішньої побудови візирновимірювальної системи, яка не підлягає розбору, - усунення необхідності застосування методу послідовних наближень Перелічені фактори забезпечують запропонованому способу швидкодію і можливість автоматизації процесу юстирування Детально опис запропонованого способу представлено нижче з посиланням на креслення з такою інформацією Фіг 1 - Схема розвороту голови оператора відносно базової системи координат візира при вимірюванні кутів візування Yy,Yz, Фіг 2 - Розворот системи відліку вимірювача И1 відносно номінального положення вимірювальної системи, Фіг 3 - Функціональна залежність передачі похибок розвороту системи відліку вимірювача И у ВИХІДНІ кути візирної системи Yy,Yz, при ЗМІНІ вертикального кута візування Yz, Фіг 4-5 - Схеми технічної реалізації вводу заданих точок розвороту голови оператора, Фіг 6-8 - Схеми вибору точок переміщення голови оператора у просторі при юстируванні нашоломної системи по запропонованому способу, Фіг 9 - Блок-схема технічної реалізації запропонованого способу На кресленнях прийняті такі позначення OXYZ - базова система координат, Yy,Yz - кути вимірювання в базовій системі координат, Yx - розворот з креном голови оператора в базовій системі координат, OXrYrZr - система розвороту голови оператора в нульовому положенні (при Yx=0, Yy=0, Yz=0), OX}Y/Z[. система розвороту голови оператора при відповідному вводі кутів візування YyYz і розвороту з креном Yx (зв'язана система координат), OX°MY°MZ°M система вимірювання параметрів розвороту голови оператора у номінальному положенні (без наявності похибок установлення вимірювачів відносно системи розвороту голови оператора), шихо, шиуо, wMzo - кутові швидкості розвороту голови оператора в номінальній системі вимірювання XO°MYV°M OXM|YM|ZMi - система координат вимірювача И 1 при наявності кутового зміщення чутливої осі, OYMi - чутлива вісь вимірювача И1, Д^х-і, ДЧ-^і - кутові, які треба юстирувати, зміщення чутливої осі вимірювача И1 відносно номінальної системи вимірювання, - поточні положення системи координат вимірювача при розвороті чутливої осі на КуТИ Д^х-І, Д ^ г і ВІДПОВІДНО, Wx, Wy, W z - узагальнене позначення передаточних відношень параметрів, що юстируються, вимірювальної системи у ВИХІДНІ кути візирної системи фх, фу ,фг, 5фх передаточні відношення похибок кутового зміщення чутливої осі першого вимірювача (ДЧ^, ДЧ^-і), у вихіднікути візирної системи фх, фу ,фг, OpXpYpZp - система координат юстирувального растра, OCTXCTYCTZCT -система координат системи стабілізації, OnXnYnZn - система координат перехрестя візирної системи, ДЧ-'хз, ДЧ-'гз - кутові, потребуючі юстирування, зміщення чутливої осі вимірювача ИЗ відносно номінальної системи вимірювання, 5Фх 5фу 5ф 2 5ц/уз 5фу S4>z3 5ф 2 S4>z3 S4>z3 - передаточні відношення похибок кутового зміщення чутливої осі третього вимірювача (ДЧ\з, ДЧ-^з) у ВИХІДНІ кути візирної СИСТеМИ фх, фу ,ф 2 , ш и х ш и у ш и 2 - вимірювані кутові швидкості розвороту голови оператора при наявності кутових зміщень чутливих осей вимірювачів Й1, И 2, ИЗ, відносно номінальної системи вимірювання Пояснення способу юстирування нашоломної системи візування здійснюється за допомогою схем технічної реалізації вводу заданих точок розвороту голови оператора, показаних на Фіг 4,5 , Де 1 - булька рівня, 2 - коло стабілізації, 3 - юстирувальний растр, 4 - перехрестя візирної системи та пристрій, блок-схема якого представлена на Фіг 9, де 5 - нашоломна система візування, 6 - візир, 7,8,9 - вимірювачі кутової швидкості розвороту голови оператора, 10 - блок вимірювання параметрів розвороту голови оператора, 11 - електронний блок, 12 - блок орієнтації та завдання розвороту, 13 - блок вводу параметрів, 14 - блок індикації юстирувальних параметрів, 15 - обчислювач У блоці вимірювання параметрів розвороту голови оператора 10 жорстко установлені на посадочні місця вимірювачі 7,8,9 кутової швидкості розвороту голови оператора (ш и х , ш и у , шио)ш Електронний блок здійснює визначення кутів візування по виміряним кутовим швидкостям розвороту голови оператора (ших, ш и у , wMz), ВІДПОВІДНО до детально описаної схеми патенту України №30189А, кл G 02 В 23/00, надр 15 11 2000р 49231 Згідно З запропонованим способом юстирування нашоломної системи візування, побудованій на суміщенні вимірювальної системи з візирною системою на шоломі оператора, відбувається початкове установлення вимірювачів 7,8,9 кутового розвороту голови оператора на посадочні місця при орієнтації перехрестя 4 візира 6 в нульове положення відносно базової системи координат Дана операція відбувається аналогічно операціям юстирування способу-прототипу При цьому, для подальшого пояснення операцій юстирування запропонованого способу необхідно відзначити, що куги горизонтального фу та вертикального візування ф2 (див Фіг 1) визначаються як кутові координати орієнтації осі візира 6, встановленого на рухомій основі, наприклад, на шоломі оператора, при суміщенні перехрестя 4 візира 6 з заданим орієнтиром Кутова орієнтація осі візира при цьому визначається з урахуванням розвороту з креном голови оператора фх за допомогою спеціально установлених вимірювачів 7, 8, 9 параметрів кутового розвороту ших, ш и у , wMz вимірювальні осі яких зв'язані з головою оператора, взаємно перпендикулярні і змінюють свою орієнтацію у просторі, як показано на схемі Фіг 1 При юстируванні системи без похибок вимірювальні осі вимірювачів 7,8,9 (И1,И2,ИЗ) збігаються з осями номінальної системи ОХ°И,У M,Z°M в такій ПОСЛІДОВНОСТІ - вимірювальна вісь вимірювача И1(ОУиі) при вимірюванні ш и у збігається з віссю (шиу= шиуо), -вимірювальнавісь вимірювача И2 (OZM2) при вимірюванні wMz збігається з віссю OZ°M (wMz= wMzo), - вимірювальна вісь вимірювача ИЗ (ОХиз) при вимірюванні ш и х збігається з віссю ОХ°И (ших= шихо) Таким чином, вимірюючи параметри кутового розвороту рухомої основи, тобто голови оператора (ших= шихо, шиу=шиуо, wMz=wMzo) при юстируванні системи без похибок з урахуванням того, що осі номінальної вимірювальної системи збігаються з базовою в нульовому положенні (фх=0, фу=0 ,фг=0), можна визначити ВИХІДНІ кути візування фх, фу за формулами способу-прототипу та ВІДПОВІДНО ДО схеми, представленої на ФІГ 1 Ф2 = Jlco!!!c^x +& о kit Фу 0 де фх - кут розвороту з креном голови оператора у зв'язаній з головою оператора системі координат t cpx=J«xdt о При виникненні непогодженості між номінальною вимірювальною системою OX°MY°MZ°M та вимірювальними осями И1, И2, ИЗ на виході візирної системи в каналах фх, фу ,ф2, з'являються похибки, функціональна залежність яких по діапазону зміни кутів візування визначається похибкою встановлення вимірювальної осі відносно номінальної вимірювальної системи, обраним каналам реєстрації та величиною кутів візування юстирувальної 8 точки у просторі Для приклада показано зміщення вимірювальної осі вимірювача відносно осей номінальної вимірювальної системи ДЧ-^і, ДЧ-^і (див схему Фіг 2) Указані зміщення ДЧ-^і, ДЧ-^і як видно зі схеми Фіг 3, викликають наявність похибки у вихідних кутах фх, фг наглядно ілюструється функціональними залежностями передаточних відношень на основі ідентичності їх з похибками вихідних кутів ВІДПОВІДНО до ПОСТІЙНОСТІ похибок при юстируванні та формулою їх передачі у ВИХІДНІ кути візирної системи, наприклад Враховуючи, що зміщення вимірювальної осі ДЧ-^і постійне для початку юстирування, то і вигляд функціональної залежності реєструємої похибки в каналі вертикального візування Дфу визначається функціональною залежністю передаточно5фу х1 го відношення (див ФігЗ) Аналізуючи криві передаточних відносин юстирувальних параметрів Д^х-і, ДЧ-^і у ВИХІДНІ кути візира, необхідно ВІДМІТИТИ, що просторові умови, при яких мають місце функціональні залежності (Фіг 3), обумовлюють навіть по одному вимірювачу И1 наявність декількох параметрів, що впливають (наприклад, двох х1 функціональних залежностей , z 1 у каналі горизонтального кута візування, що не дає можливості однозначного визначення юстирувальних параметрів ДЧ-^і, ДЧ-^і враховуючи при цьому ще можливий вплив на цей канал і похибки юстирування інших вимірювачів И2, ИЗ На основі вищевикладеного і враховуючи складність сукупного впливу похибок початкового установлення вимірювачів відносно номінальної вимірювальної системи (И1-Д^ х і, A4Jzi,H2-A4JX2, ДЧ-^.ИЗ-ДЧ-^з, ДЧ-'гз) наступною операцією запропонованого способу юстирування є підбір і визначення точок розвороту голови оператора, переміщення із яких залежить тільки від одного юстирувального параметра Таким чином у початковий момент установлюють вимірювачі 7,8,9 на посадочні місця кронштейну вимірювальної системи при орієнтації перехрестя 4 візирної системи в нульове положення відносно базової системи координат Для ліквідації похибки юстирування при жорсткому закріпленні вимірювачів 7,8,9 на посадочні місця необхідно провести такі додаткові операції Вводять до поля зору оператора растр 3 (див Фіг 4,5), який задає ПОСЛІДОВНІ розвороти голови оператора, з проведенням попередньої операції по суміщенню ВІДЛІКОВОІ системи растра 3 з базовою системою координат Ця операція відбувається в результаті суміщення міток стабілізації 1 , 2 , які вводяться до поля зору при накладенні перехрестя 4 візира 6 на перехрестя растра 3, установленого в нульове положення відносно ВІДЛІКОВОІ системи координат Для приклада на Фіг 4 показана базова систе 49231 10 ма координат візира 6 (OXYZ), зв'язана з Земною системою координат При цьому мітки стабілізації 1,2 для суміщення ВІДЛІКОВОІ системи растра З (OXpYpZp) формуються, наприклад, за допомогою рівня, який містить в собі бульку 1, і коло стабілізації 2 (див Фіг 4 та Фіг 5) Виконуючи суміщення кола стабілізації 2 з булькою рівня 1, тобто обрамовуючи її, орієнтують горизонтальну площину XCTOZCT системи координат рівня паралельно горизонтальній площині Землі, тобто горизонтальній площині базової системи координат При цьому за рахунок конструктивного суміщення горизонтальних площин рівня XCTOZCT та растра XpOZp при суміщенні площини рівня XCTOZCT З ПЛОЩИНОЮ XOZ базової системи координат площина растра XpOZp стає паралельною горизонтальній площині Землі А при суміщенні нульового перехрестя растра 3 з перехрестям візирної системи 4 у нульовому положенні відбувається суміщення осей координат растра з базовою системою координат в початковому положенні , тобто операція суміщення відбулась тора(фх) при ЗМІНІ кута вертикального візування ф2 та постійних значеннях кутів фх, фу з урахуванням формули (1) Для визначення параметра ДЧ\з юстирується ВІДПОВІДНО до формули (1), необхідно визначити систематичну похибку у заданому каналі (в даному випадку каналі розвороту з креном) та врахувати Для однозначного визначення похибок кутового зміщення вимірювальних осей вимірювачів И1 (ДТжі, ДЧ^і) И2 (ДФ х2 , ДЧ\2) ИЗ (ДЧ\з, AYz3) відносно номінальної вимірювальної системи (див схему Фіг 2 для вимірювача И1) необхідно розвернути голову оператора у такі точки простору, переміщення із яких обумовлює похибки вихідних кутів візування у каналах реєстрації, що функціонально залежать тільки від одного параметра, який необхідно юстирувати Розворот голови оператора у просторі задається різними положеннями міток в полі зору растра та положенням самого растра 3 відносно базової системи координат OXYZ - відносно осі ОХ (фх) перехрестями, нанесеними в площині растра 3 (Фіг 5), - відносно осей Y (фу) OZ(cpz), розворотом площини растра 3 відносно базової системи координат (див Фіг 4) Нижче наведено ідеологію вибору точок орієнтації та розвороту голови оператора у просторі для проведення операції однозначного визначення юстирувальних переміщень для компенсації похибок установлення осей вимірювачів И1,И2,ИЗ, відносно номінальної вимірювальної системи координат нашоломної системи візування, яка юстирується Як приклад показано проведення операції однозначного визначення юстирувального параметра ДЧ\з по вимірювачу ИЗ Указана операція відбувається ВІДПОВІДНО ДО графіка передаточних відношень, представлених на Фіг 6 (функціональна залежність впливу похибок установлення чутливої ( )і> ( )з - передаточні відношення юстирувального параметра ДЧ\з у вихідний кут фх системи в точках заданого переміщення голови оператора Т1, ТЗ Необхідно відзначити, що систематичні похибки на всіх каналах фх,фу,фу визначаються по "п" реєструємим параметрам у заданих точках розвороту Для випадку визначення ДЧ\з, що розглядається, систематична похибка визначається таким чином 54 уу осі вимірювача ИЗ Вплив юстирувальних похибок інших вимірювачів у даному каналі фх для даних обраних умов відсутній Таким чином, при розвороті голови оператора із точки Т1 (фх=0, ФУ=0, ф2=0) уточку ТЗ (фх=0, фу=0, ф2=-20°) може бути розглянута функціональна залежність тільки по одному параметру ДЧ\з, який юстирується Представлена функціональна залежність реєструється в каналі розвороту з креном голови опера ВІДОМІ ( у передаточні відношення ( у3 )і та )з в точках Т1 та ТЗ ВІДПОВІДНО л,„ _ А ФхЗ"АФх1 5фх 5фх 3 л v (2) де Дфхі, Дфхз - систематичні похибки каналу розвороту з креном в точках заданого переміщення голови оператора Т1 ,ТЗ, 5фх 5фх Z ІФхі " Фхзза А Ч>х = J 1 (3) фх, - значення вихідного кута фх, що реєструються, фХзад - апріорна інформація, задане значення в точці розвороту Як приклад нижче буде показано два характерних випадки визначення параметрів Д^ 2 з (ИЗ)та ДЧ\ 3 (И1) (Див Фіг 7 та Фіг 8) На схемах Фіг 7 представлено дві функціональні залежності передаточних відношень по юстиz3 рувальним параметрам ДЧ^з, , у3 , які розглядаються (інших функціональних залежностей немає) При переміщенні голови оператора з точки ТЗ (фх=0, фу=0 ф2=-20°) до точки Т4 (фх=15°, фу=0°, фг=-200,) можна визначити приріст похибки Дфх в каналі фх, який залежить тільки від юстирувального параметра Д^ 2 з у зв'язку з тим, що юстирувальний параметр ДЧ\з при переміщенні з ТЗ до Т4 5Фх збільшення не дає, тому що крива " т у о на даній ділянці не має нахилу Таким чином, на основі раніше викладеного (формули 1,2,3) юстирувальний параметр визначається таким чином 11 49231 Дфх4-Дфх3 (4) Дфхз Дфх4 - систематичні похибки каналу розвороту з креном в точках заданого переміщення голови оператора ТЗ, Т4 - передаточні відношення юстирувального параметра у вихідний кут фх у системи в точках заданого переміщення голови оператора ТЗ, Т4 На схемах Фіг 8 представлено інший характерний випадок вибору точок розвороту голови оператора для визначення наступного юстирувального параметра, в даному випадку ДЧ^і (И1) Як виду3 но зі схем Фіг 8 дві криві , ^ х 1 мають однакові характеристики, тобто при виявленні приросту або інших характеристик представлених функціональних залежностей не можливо виключити одну з них У даному випадку можна скористуватися тим, що юстирувальний параметр ДЧ\з вже визначено (див Фіг 6 та формули 2,3) За цих умов дві функ 5фу 5фу 5ш У і Si|/ v 3 у цюнальні залежності ^ Х І та і перетворюються в одну функціональну залежність при ВІДОМІЙ функції передаточного у відношення На основі викладеного можна записати величину юстирувального параметра, який визначається, при переміщенні з точки Т1 (фх=0, фу=0 ф2=0) у точку ТЗ (фх=0, фу=0 ф2=-20°) з реєстрацією "п" значень вихідних кутів візирної системи в каналі фу та порівнянням реєструємих значень фу з апріорною інформацією в точках реєстрації фузаді(Т1) Фузадз(ТЗ) А 5фу Фу1 5ф у 5ф у де Дфуі, Дфуз - систематичні похибки каналу фу в точках заданого розвороту голови оператора Т1, ТЗ (див формулу 3) Таким чином, вище описано і пояснено операції запропонованого способу юстирування нашоломної системи візування, до складу якого входять операції у такий ПОСЛІДОВНОСТІ - встановлення перехрестя 4 візирної системи в нульове положення відносно базової системи координат, 12 - жорстке закріплення на посадочних місцях шолома вимірювачів 7,8,9 кутового розвороту голови оператора, - введення до поля зору міток стабілізації 1,2 горизонтальної площини базової системи координат, - орієнтування горизонтальної площини базової системи координат паралельно горизонтальній площині Землі при суміщенні міток стабілізації 1,2 в полі зору оператора та фіксація даного положення, - введення до поля зору оператора растра 3 з мітками заданого розвороту голови оператора, - розвертання голови оператора в задані точки простору, переміщення із яких залежить від одного параметра, що юстирується, - після кожного розвороту при суміщенні перехрестя 4 візира 6 з заданою міткою, яка постійно змінюється, реєструється "п" значень вихідних кутів візування та порівняння їх з апріорною інформацією, - розвертання вимірювальної осі кожного вимірювача 7,8,9 відносно осей базової системи координат у напрямку та на величину, яка однозначно визначається виміряною розбіжністю між вихідною та апріорною інформацією Принцип технічної реалізації запропонованого способу юстирування наведено нижче з використанням схеми, представленої на Фіг 9, на прикладі юстирування пристрою, де 5 - нашоломна система візування, 6 - візир, 7,8,9 - вимірювачі кутової швидкості розвороту голови оператора, 10 - блок вимірювання параметрів розвороту голови оператора, 11 - електронний блок, 12 - блок орієнтації та завдання розвороту, 13-блок вводу параметрів, 14 - блок індикації юстирувальних параметрів, 15-обчислювач Нашоломну систему візування 5 (один з варіантів виробу, що юстирується) описано в патенті України №30189А, опубл 15 11 2000р У блоці вимірювання параметрів розвороту голови оператора 10 жорстко установлені на посадочні місця вимірювачі 7,8,9 (кутової швидкості розвороту голови оператора (ш и х , ш и у , wMz) Електронний блок 11 здійснює визначення кутів візування за виміряними кутовими швидкостями розвороту голови оператора (ш и х , ш и у , wMz), ВІДПОВІДНО до докладно описаної схеми патенту України №30189А, кл G 02 В 23/00, опубл 15 11 2000р Блок орієнтації та завдання розвороту 12 являє собою оптичний колімаційний формувач, який забезпечує введення в поле зору оператора таких зображень для проведення операцій способу, який пропонується (див Фіг 4,5) - міток стабілізації (1 - булька рівня, 2 - коло стабілізації), - растра 3, який задає розворот голови оператора у задані точки простору, для чого забезпечено можливість повороту його навколо осей базової системи координат OXYZ при суміщенні її з системою координат растра 13 49231 Складається колімаційний формувач, наприклад, з напівпрозорого дзеркала, установленого перед очима оператора, підсвічених міток, виконаних, наприклад, у вигляді стабілізуючого рівня, що складається з бульки 1 та кіл 2, які облямовують бульку 1 та растр 3, який являє собою набір заданих для здійснення розвороту перехресть, що нанесені на плоску пластину Стабілізуючий рівень і растр установлені в фокальній площині лінзового об'єктива (див Л П Лазарев "Оптико-электронные приборы наведения", Москва, "Машиностроение", 1989г с 247-250) При цьому рівень, який вводиться у поле зору оператора, виконаний, наприклад, у вигляді сферичного фокального рівня згідно з мал 1 69, с 253 Справочника конструктора оптикомеханических приборов М Я Крюгер и др , Ленинград, "Машиностроение", 1980г Блок вводу параметрів 13, блок індикації 14 і обчислювач 15 можуть бути виконані функціонально за допомогою одного пристрою, наприклад, комп'ютера типу Pentium Запропонований пристрій реалізації способу юстирування функціонує таким чином На початку роботи виконується операція по установці перехрестя 4 візира 6 в нульове положення відносно базової системи координат Базова система координат, у свою чергу, орієнтується в задане положення, у даному прикладі реалізації вона установлюється паралельно земній системі координат по міткам стабілізації, які вводяться у поле зору (1,2 Фіг 4, Фіг 5) Усі ІНШІ системи координат, які використовуються для юстирування, при сполученні базової системи координат по міткам стабілізації 1,2 з земною системою також сполучаються з нею за рахунок попередньої установки - системи формування перехрестя (OXnYnZn Фіг 4) - відносно базової системи координат, - системи растра (OXpYpZp - Фіг 4) - відносно системи стабілізації Для проведення повного юстирування пристрою установка голови оператора робиться послідовно у задані точки простору, де повинні бути виконані такі розвороти Т1(фхзад1=0, СрУзад1=0 ф7зад1=0) Т2(ср ХЗ ад2=0 фузад2=0 ф7зад2=0), ТЗ(ф Х З адЗ=0 фузадЗ=0 ф7задЗ=-20°) Т4(ф Х З ад4=15°, фУзад4=0, ф7зад4=-20°), Т 5 ( ф Х З а д 5 = 3 0 ° ф у3 ад5=0 фЯзад5=0), Установка в перелічені точки простору голови оператора виконується за допомогою блока орієнтації та завдання розвороту 12 (див Фіг 9) при ВІДПОВІДНИХ поворотах растра 3 (див Фіг 4, Фіг 5) відносно базової системи координат OXYZ для ВВОДУ КуТІВ фузад І фгзад, Э 33 ДОПОМОГОЮ ПерехреС тя, яке нанесено на растрі, - розворот фХЗад Для приклада роботи запропонованого пристрою у процесі юстирування нижче розглядається однозначне визначення юстирувального параметра ДЧ\з для юстирування вимірювача 9 (ИЗ), який визначає величину кутової швидкості ш и х Для визначення запропонованого параметра ДЧ\з проводиться операція установки голови оператора за допомогою блока 12 в задані точки простору Т1, ТЗ, переміщення з яких залежать тільки від одного 14 юстирувального параметра ДЧ\з (див Фіг 6) Ураховуючи, що процес визначення і видачі кутів візування у будь-якій точці простору є процес безперервний і поточні величини у кожному каналі Фх, Фу , P відрізняються один від одного в залежно
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for adjusting a helmet-based sighting system
Автори англійськоюBiliaeva Halyna Hryhorivna
Назва патенту російськоюСпособ юстировки нашлемной системы визирования
Автори російськоюБиляева Галина Григорьевна
МПК / Мітки
МПК: G01C 21/00, G01B 11/26, G01C 21/10, G02B 23/00
Мітки: спосіб, системі, нашоломної, візування, юстирування
Код посилання
<a href="https://ua.patents.su/10-49231-sposib-yustiruvannya-nasholomno-sistemi-vizuvannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб юстирування нашоломної системи візування</a>
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30200
Опубліковано: 15.05.2003
Автори: Черняк Сергій Іванович, Беляєва Галина Григорівна, Плита Олександр Андрійович
МПК: G02B 23/00
Мітки: системою, спосіб, візування, нашоломною, визначення, кутів
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі осі візира, встановленого на рухомій основі, наприклад на шоломі оператора, при суміщенні перехрестя візира з ціллю, який відрізняється тим, що вимірюють величини швидкості кутового повороту відносно трьох взаємно перпендикулярних осей рухомої основи, а кути вертикального
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30187
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Черняк Сергій Іванович, Плита Олександр Андрійович
МПК: G02B 23/00
Мітки: системою, визначення, візування, спосіб, кутів, нашоломною
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає в визначенні кутових координат орієнтації в просторі вісі візиру, установленого на рухомій основі, та суміщенні перехрестя візиру з ціллю, який відрізняється тим, що вимірюють величину швидкості кутового розвороту рухомої основи відносно вертикальної вісі базової системи координат, суміщують контрольні та стабілізовані мітки в полі зору візиру, а координати...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30191
Опубліковано: 15.11.2000
Автори: Бузанов Віктор Іванович, Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: визначення, системою, спосіб, кутів, нашоломною, візування
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі вісі візиру, встановленного на рухомій основі, при суміщенні перехрестя візиру з ціллю, який відрізняється тим, що додатково вимірюють параметри кутового розвороту відносно двох взаємноперпендикулярних вісей рухомої основи, суміщують контрольні та стабілізовані мітки у полі зору візиру, а кути азимутального jу та...
Спосіб візування
Номер патенту: 58746
Опубліковано: 15.08.2003
Автори: Москаленко Михайло Андрійович, Потапова Галина Костянтинівна
МПК: B64D 45/00, G01C 3/00
Формула / Реферат:
1. Спосіб візування, який полягає у тому, що напрямок візування сполучають із точкою візування, який відрізняється тим, що додатково формують допоміжний напрямок візування і сполучають його з видимим зображенням точки візування.2. Спосіб візування по п. 1, який відрізняється тим, що допоміжний напрямок візування формують як напрямок на видиме зображення точки, заданої напрямком візування і відстанню до об'єкта візування.3....
Спосіб визначення положення осей координат інерціальної навігаційної системи об’єкта відносно базової системи (варіанти)
Номер патенту: 59494
Опубліковано: 15.09.2003
Автори: Рачук Владімір Сєргєєвіч, Ковалєвскій Міхаіл Марковіч, Карпов Анатолій Стєпановіч, Борісов Андрєй Владіміровіч, Іванов Робєрт Константіновіч, Монахов Юрій Владіміровіч
МПК: G01S 5/00, G01S 5/02, G01S 5/04
Мітки: положення, координат, базової, визначення, об'єкта, спосіб, відносної, варіанти, системі, навігаційної, осей, інерціальної
Формула / Реферат:
1. Спосіб визначення положення осей координат інерціальної навігаційної системи (2) об'єкта (1) відносно базової системи координат (3), що включає навігаційні вимірювання об'єкта (1), рухомого в інерціальному просторі, в базовій системі координат (3) і в інерціальній системі координат об'єкта (2), який відрізняється тим, що:- в моменти часу tі і tі+1 вимірюють координати рухомого об'єкта (1) в системі координат Глобальної навігаційної...
Попередній патент: Біологічно активний препарат “кардонат”
Наступний патент: Спосіб утворення вторинних бічних стовбурів у системі свердловини та система свердловин
Випадковий патент: Кришечка для пляшечки та пляшечка